Високошвидкісне гібридне морське судно

Формула / Реферат
1. Високошвидкісне гібридне морське судно (1), що оснащене гідродинамічними або підводними крилами (4), призначеними для створення гідродинамічної підйомної сили та керування креном, тангажем і величиною підйомного зусилля, яке може експлуатуватися у двох принципово різних режимах, а саме в гідростатично стійкому режимі при малій швидкості руху, який характеризується позитивною висотою метацентра (+GM) і в якому центральний елемент корпусу (2) і принаймні один з бокових елементів корпусу (3) занурені у воду, та в гідростатично нестійкому режимі при великій швидкості руху, який характеризується негативною висотою метацентра (-GM) і в якому тільки центральний елемент корпусу (2) частково занурений у воду, а бокові елементи корпусу частково або повністю підняті над рівнем води, а динамічна остійність судна забезпечується вищезгаданою системою підводних крил, яке відрізняється тим, що:
- судно (1) складається з центрального елемента корпусу (2), який є частиною суцільної жорсткої палубної конструкції, яка в поперечному напрямку виступає за межі ширини центрального елемента корпусу (2) і де нижня поверхня згаданої палубної конструкції, означена як занурювана частина палуби (8), розташовується над ватерлінією (WL-2), коли судно нерухоме в неушкодженому стані;
- відношення найбільшої ширини набору корпусу судна (1) над ватерлінією до найбільшої ширини набору центрального елемента корпусу (2) на рівні ватерлінії (WL-1, WL-2) для будь-яких умов плавання прямостоячого судна в неушкодженому стані не менше 2 ;
- відношення найбільшої довжини центрального елемента корпусу (2) вздовж ватерлінії до найбільшої ширини вздовж ватерлінії в режимі плавання прямостоячого неушкодженого судна не менше 6;
- центральний елемент корпусу (2) має поперечний переріз нижче рівня занурення палуби в кормовій її частині, який поступово переходить в U-, V- та Y-подібний у носовій частині або ж є їх комбінацією;
- судно (1) має щонайменше один набір бокових елементів корпусу (3), розміщених так, що один набір складається з одного бокового елемента, розташованого на кожному з боків поздовжньої осьової лінії судна і з'єднаного з судном нижче занурюваної частини палуби, а висота цього бокового елемента менша за висоту центрального елемента корпусу;
- бокові елементи корпусу (3) розміщуються в поздовжньому напрямку так, що їх більша частина розташована ближче до корми відносно положення центра ваги судна по довжині;
- занурювана частина палуби (8) у поздовжньому напрямку поширюється принаймні від верхньої і найдальшої частини носу (30) бокових елементів корпусу до транця (14) центрального елемента корпусу (2) ;
- вищезгадані гідродинамічні або підводні крила (4, 5) розташовані так, що центр гідродинамічної підйомної сили розташовується в або поблизу положення центра ваги судна по довжині;
- вищезгадані гідродинамічні або підводні крила (4, 5) створюють на максимальній швидкості динамічну підйомну силу, що відповідає щонайменше 20% ваги ненавантаженого судна.
2. Високошвидкісне гібридне морське судно (1) згідно з пунктом 1, яке відрізняється тим, що воно має у своєму складі конструкцію, що складається з повністю зануреної первинної системи гідродинамічних або підводних крил (4), повний поперечний розмах якої складає щонайменше 50% найбільшої повної ширини зазначеного судна, яка розташовується поблизу положення центра ваги судна по довжині, закріплюється за допомогою як мінімум двох вертикальних і/або похилих стояків (11), які передають судну гідродинамічні зусилля, і в складі якої (конструкції) є щонайменше один дистанційно керований закрилок (27) з кожного боку осьової лінії судна, під'єднаний до кормової частини підводного крила (4), який (закрилок) забезпечує потрібну гідродинамічну остійність, створюючи керований поперечний відновлювальний момент відносно осьової лінії судна (9) під час руху судна вперед на великій швидкості.
3. Високошвидкісне гібридне морське судно (1) згідно з пунктами 1 і 2, яке відрізняється тим, що має у своєму складі конструкцію, яка складається з одного набору повністю занурених вторинних гідродинамічних чи підводних крил (5), розташованого на центральному елементі корпусу (2) на значній відстані в бік корми від положення центра ваги судна по довжині, повний поперечний розмах зазначеного набору складає менше 50% найбільшої повної ширини зазначеного судна, з'єднується з центральним елементом корпусу і/або занурюваною частиною палуби (8) за допомогою як мінімум одного стояка (11) на кожен вказаний набір, що передає судну гідродинамічні зусилля; до кормової частини набору крил під'єднано щонайменше один дистанційно керований закрилок (27), який забезпечує потрібний момент для регулювання тангажу відносно поздовжнього центра обертання судна, створюючи керований поздовжній відновлювальний момент під час руху судна вперед на великій швидкості.
4. Високошвидкісне гібридне морське судно (1) згідно з пунктами 1 і 2, яке відрізняється тим, що має у своєму складі конструкцію, яка складається з двох наборів повністю занурених вторинних гідродинамічних або підводних крил (5) , розташованих на центральному елементі корпусу (2), один з яких розміщується у напрямку до корми від положення центра ваги судна по довжині, у той час як інший - у напрямку до носа від положення центра ваги, повний поперечний розмах кожного з наборів не перевищує 50% найбільшої повної ширини зазначеного судна, набори крил прикріплюються до центрального елемента корпусу і/або занурюваної частини палуби (8) за допомогою як мінімум одного стояка (11) на кожен набір, який передає судну гідродинамічні зусилля, до кожного з яких (наборів) під'єднано щонайменше один дистанційно керований закрилок (27), який забезпечує потрібний момент для регулювання тангажу відносно поздовжнього центра обертання судна, створюючи керований поздовжній відновлювальний момент під час руху судна вперед на великій швидкості.
5. Високошвидкісне гібридне морське судно (1) згідно з пунктом 1, яке відрізняється тим, що має у своєму складі конструкцію, яка складається з двох наборів повністю занурених первинних гідродинамічних або підводних крил (4), повний поперечний розмах кожного з наборів складає не менше 50% найбільшої повної ширини зазначеного судна, один з них розміщується попереду від положення центра ваги судна по довжині, у той час як інший -позаду від положення центра ваги, закріплюються за допомогою принаймні двох вертикальних і/або похилих стояків (11) на кожен набір, які передають судну гідродинамічні зусилля, до кожного з яких (наборів) під'єднано щонайменше один дистанційно керований закрилок (27) з кожного боку від осьової лінії судна, причому один закрилок під'єднаний до кормової частини заднього підводного крила (4), а інший - до кормової частини переднього підводного крила, закрилки забезпечують потрібну гідродинамічну остійність та гасіння кільової качки, створюючи керований поперечний та поздовжній відновлювальні моменти під час руху судна вперед на великійшвидкості.
6. Високошвидкісне гібридне морське судно (1) згідно з пунктом 1, яке відрізняється тим, що має у своєму складі конструкцію, яка складається з кількох наборів повністю занурених первинних гідродинамічних або підводних крил (4), з'єднаних з судном за допомогою вертикальних і/або похилих стояків (11).
7. Високошвидкісне гібридне морське судно (1) згідно з пунктом 1, яке відрізняється тим, що має у своєму складі конструкцію, яка складається з одного або кількох наборів гідродинамічних самостабілізувальних крил або підводних крил (6), що перетинають поверхню води, з'єднаних з судном за допомогою вертикальних і/або похилих стояків (11).
8. Високошвидкісне гібридне морське судно (1) згідно з будь-яким з пунктів 1-7, яке відрізняється тим, що має бокові елементи корпусу (3), які складаються зі структурно інтегрованих або незалежно під'єднаних елементів, розташованих нижче рівня занурюваної частини палуби (8).
9. Високошвидкісне гібридне морське судно (1) згідно з будь-яким з пунктів 1-8, яке відрізняється тим, що має окремі бокові елементи корпусу (21), висота яких може регулюватися незалежно вздовж усієї довжини бокових елементів корпусу або ж в межах більшої частини їх довжини.
10. Високошвидкісне гібридне морське судно згідно з будь-яким з пунктів 1-9, яке відрізняється тим, що має більший розмір, при цьому бокові елементи корпусу (3) розташовані один за одним по обидва боки від осьової лінії у поздовжньому напрямку, так що положення центра ваги судна по довжині розміщується між транцем задніх бокових елементів корпусу та носом передніх бокових елементів корпусу.
11. Високошвидкісне гібридне морське судно (1) згідно з будь-яким з пунктів 1-9, яке відрізняється тим, що центральний елемент корпусу (2) оснащений одним або кількома баками водяного баласту (15) для швидкого спорожнення та заповнення водою за допомогою елементів (16, 17, 18, 25).
12. Високошвидкісне гібридне морське судно (1) згідно з будь-яким з пунктів 1-10, яке відрізняється тим, що має бак водяного баласту (15), з'єднаний із зануреною частиною центрального елемента корпусу (2), який (бак) має постійний отвір (16) в нижній частині зазначеного елемента корпусу, розташований попереду від транця (14) зазначеного елемента корпусу, і використовує гідростатичний і/або гідродинамічний водяний напір навколишньої води для швидкого заповнення бака, коли судно не рухається чи рухається вперед, та гідродинамічний тиск водяного потоку, що проходить нижче отвору для зменшення водяного баласту під час руху вперед за допомогою вертикального виступу (17) в нижній обшивці і структурно інтегрованої клиноподібної підошви (18) в задній частині отвору, або оснащений саморегульованим чи дистанційно керованим лотком (19) , розташованим за отвором, або ж оснащений дистанційно керованою плитою (20), розташованою в передній частині отвору і шарнірно закріпленою в точці (27) позаду вертикального виступу.
Текст
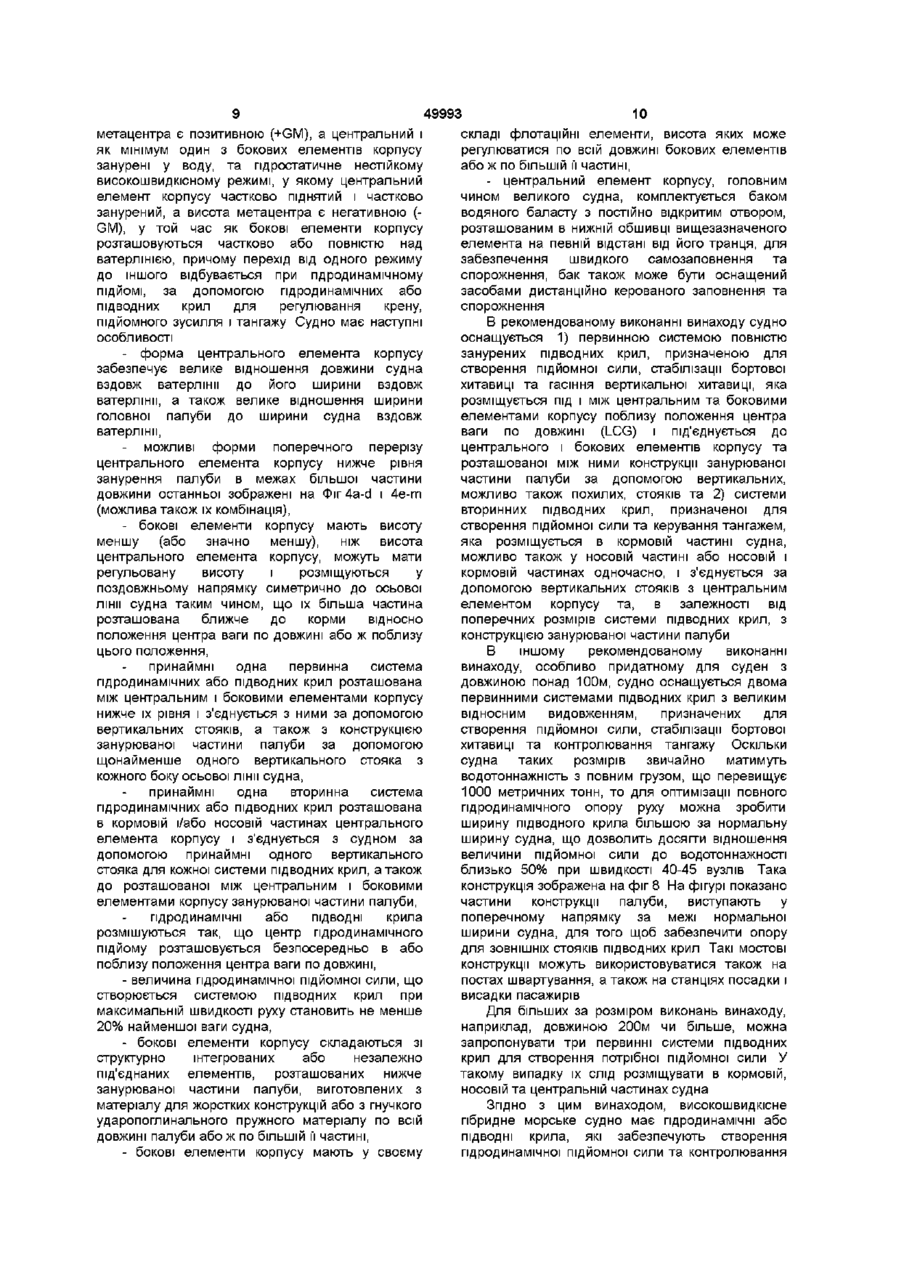
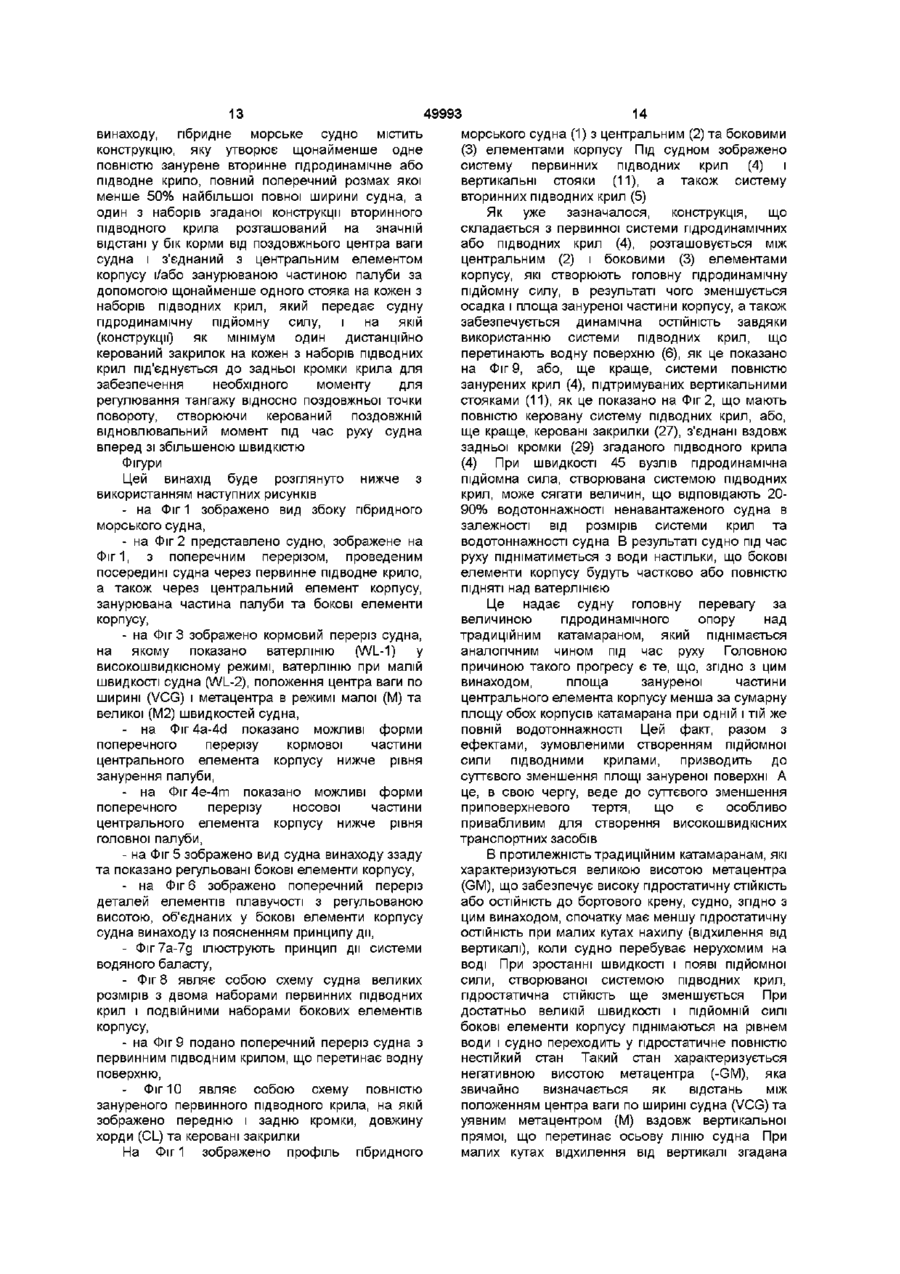
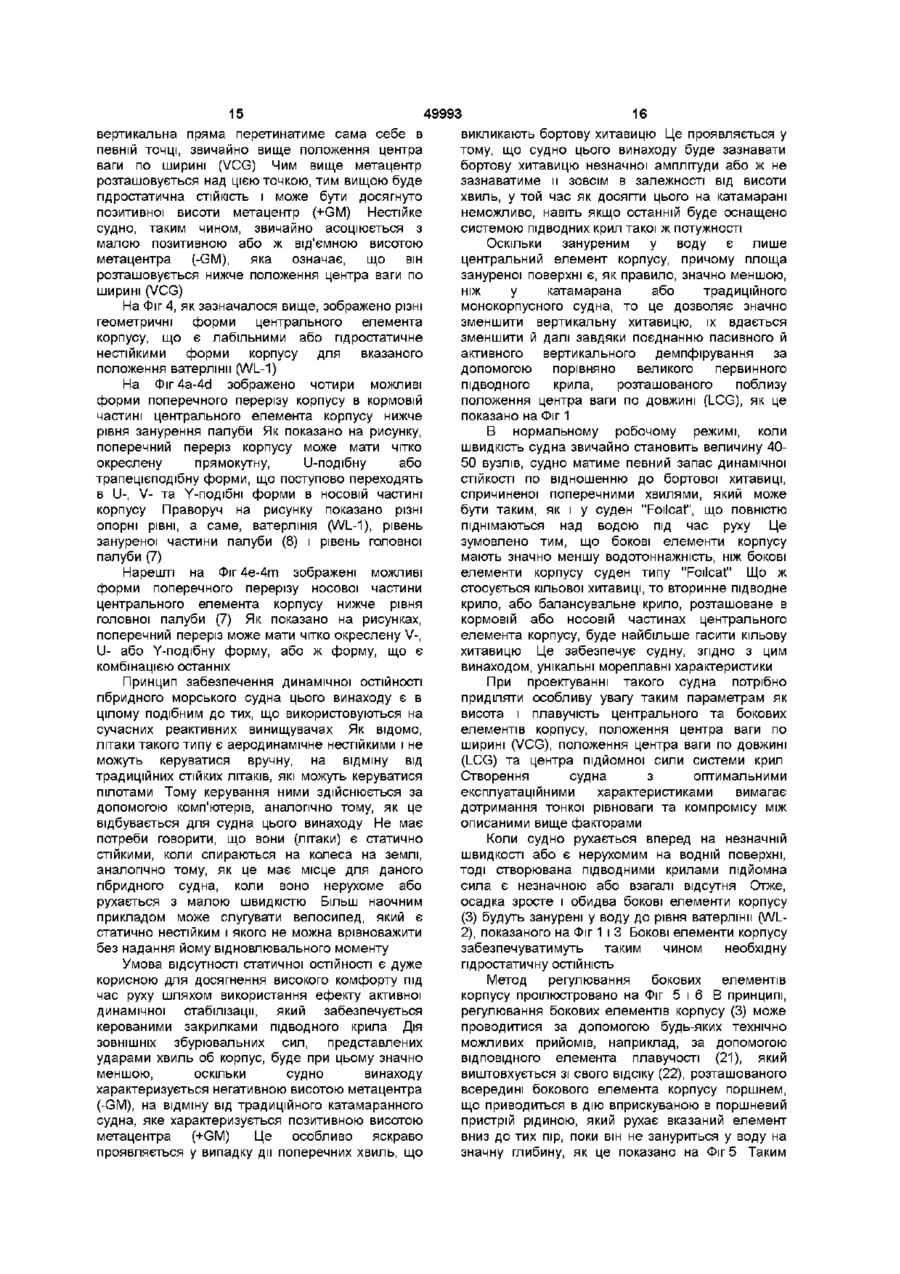
1 Високошвидкісне гібридне морське судно (1), що оснащене гідродинамічними або підводними крилами (4), призначеними для створення гідродинамічної підйомної сили та керування креном, тангажем і величиною підйомного зусилля, яке може експлуатуватися у двох принципово різних режимах, а саме в гідростатично стійкому режимі при малій швидкості руху, який характеризується позитивною висотою метацентра (+GM) і в якому центральний елемент корпусу (2) і принаймні один з бокових елементів корпусу (3) занурені у воду, та в гідростатично нестійкому режимі при великій швидкості руху, який характеризується негативною висотою метацентра (-GM) і в якому тільки центральний елемент корпусу (2) частково занурений у воду, а бокові елементи корпусу частково або повністю ПІДНЯТІ над рівнем води, а динамічна ОСТІЙНІСТЬ судна забезпечується вищезгаданою системою підводних крил, яке відрізняється тим, що - судно (1) складається з центрального елемента корпусу (2), який є частиною суцільної жорсткої палубної конструкції, яка в поперечному напрямку виступає за межі ширини центрального елемента корпусу (2) і де нижня поверхня згаданої палубної конструкції, означена як занурювана частина палуби (8), розташовується над ватерлінією (WL2), коли судно нерухоме в неушкодженому стані, - відношення найбільшої ширини набору корпусу судна (1) над ватерлінією до найбільшої ширини набору центрального елемента корпусу (2) на рівні ватерлінії (WL-1, WL-2) для будь-яких умов плавання прямостоячого судна в неушкодженому стані не менше 2 , - відношення найбільшої довжини центрального елемента корпусу (2) вздовж ватерлінії до найбільшої ширини вздовж ватерлінії в режимі плавання прямостоячого неушкодженого судна не менше 6, центральний елемент корпусу (2) має поперечний переріз нижче рівня занурення палуби в кормовій її частині, який поступово переходить в U-, V- та Y-подібний у носовій частині або ж є їх комбінацією, - судно (1) має щонайменше один набір бокових елементів корпусу (3), розміщених так, що один набір складається з одного бокового елемента, розташованого на кожному з боків поздовжньої осьової лінії судна і з'єднаного з судном нижче занурюваної частини палуби, а висота цього бокового елемента менша за висоту центрального елемента корпусу, - бокові елементи корпусу (3) розміщуються в поздовжньому напрямку так, що їх більша частина розташована ближче до корми відносно положення центра ваги судна по довжині, - занурювана частина палуби (8) у поздовжньому напрямку поширюється принаймні від верхньої і найдальшої частини носу (ЗО) бокових елементів корпусу до транця (14) центрального елемента корпусу (2) , - вищезгадані гідродинамічні або ПІДВОДНІ крила (4, 5) розташовані так, що центр гідродинамічної підйомної сили розташовується в або поблизу положення центра ваги судна по довжині, - вищезгадані гідродинамічні або ПІДВОДНІ крила (4, 5) створюють на максимальній швидкості динамічну підйомну силу, що відповідає щонайменше 20% ваги ненавантаженого судна 2 Високошвидкісне гібридне морське судно (1) згідно з пунктом 1, яке відрізняється тим, що воно має у своєму складі конструкцію, що складається з повністю зануреної первинної системи гідродинамічних або підводних крил (4), повний поперечний розмах якої складає щонайменше 50% найбільшої повної ширини О со 49993 зазначеного судна, яка розташовується поблизу положення центра ваги судна по довжині, закріплюється за допомогою як мінімум двох вертикальних і/або похилих стояків (11), які передають судну гідродинамічні зусилля, і в складі якої (конструкції) є щонайменше один дистанційно керований закрилок (27) з кожного боку осьової лінії судна, під'єднаний до кормової частини підводного крила (4), який (закрилок) забезпечує потрібну гідродинамічну ОСТІЙНІСТЬ, створюючи керований поперечний відновлювальний момент відносно осьової лінії судна (9) під час руху судна вперед на великій швидкості 3 Високошвидкісне гібридне морське судно (1) згідно з пунктами 1 і 2, яке відрізняється тим, що має у своєму складі конструкцію, яка складається з одного набору повністю занурених вторинних гідродинамічних чи підводних крил (5), розташованого на центральному елементі корпусу (2) на значній відстані в бік корми від положення центра ваги судна по довжині, повний поперечний розмах зазначеного набору складає менше 50% найбільшої повної ширини зазначеного судна, з'єднується з центральним елементом корпусу і/або занурюваною частиною палуби (8) за допомогою як мінімум одного стояка (11) на кожен вказаний набір, що передає судну гідродинамічні зусилля, до кормової частини набору крил під'єднано щонайменше один дистанційно керований закрилок (27), який забезпечує потрібний момент для регулювання тангажу відносно поздовжнього центра обертання судна, створюючи керований поздовжній відновлювальний момент під час руху судна вперед на великій швидкості 4 Високошвидкісне гібридне морське судно (1) згідно з пунктами 1 і 2, яке відрізняється тим, що має у своєму складі конструкцію, яка складається з двох наборів повністю занурених вторинних гідродинамічних або підводних крил (5) розташованих на центральному елементі корпусу (2), один з яких розміщується у напрямку до корми від положення центра ваги судна по довжині, у той час як інший - у напрямку до носа від положення центра ваги, повний поперечний розмах кожного з наборів не перевищує 50% найбільшої повної ширини зазначеного судна, набори крил прикріплюються до центрального елемента корпусу і/або занурюваної частини палуби (8) за допомогою як мінімум одного стояка (11) на кожен набір, який передає судну гідродинамічні зусилля, до кожного з яких (наборів) під'єднано щонайменше один дистанційно керований закрилок (27), який забезпечує потрібний момент для регулювання тангажу відносно поздовжнього центра обертання судна, створюючи керований поздовжній відновлювальний момент під час руху судна вперед на великій швидкості 5 Високошвидкісне гібридне морське судно (1) згідно з пунктом 1, яке відрізняється тим, що має у своєму складі конструкцію, яка складається з двох наборів повністю занурених первинних гідродинамічних або підводних крил (4), повний поперечний розмах кожного з наборів складає не менше 50% найбільшої повної ширини зазначеного судна, один з них розміщується попереду від положення центра ваги судна по довжині, у той час як інший -позаду від положення центра ваги, закріплюються за допомогою принаймні двох вертикальних і/або похилих стояків (11) на кожен набір, які передають судну гідродинамічні зусилля, до кожного з яких (наборів) під'єднано щонайменше один дистанційно керований закрилок (27) з кожного боку від осьової лінії судна, причому один закрилок під'єднаний до кормової частини заднього підводного крила (4), а інший - до кормової частини переднього підводного крила, закрилки забезпечують потрібну гідродинамічну ОСТІЙНІСТЬ та гасіння кільової качки, створюючи керований поперечний та поздовжній відновлювальні моменти під час руху судна вперед на великій швидкості 6 Високошвидкісне гібридне морське судно (1) згідно з пунктом 1, яке відрізняється тим, що має у своєму складі конструкцію, яка складається з кількох наборів повністю занурених первинних гідродинамічних або підводних крил (4), з'єднаних з судном за допомогою вертикальних і/або похилих стояків (11) 7 Високошвидкісне гібридне морське судно (1) згідно з пунктом 1, яке відрізняється тим, що має у своєму складі конструкцію, яка складається з одного або кількох наборів гідродинамічних самостабілізувальних крил або підводних крил (6), що перетинають поверхню води, з'єднаних з судном за допомогою вертикальних і/або похилих стояків (11) 8 Високошвидкісне гібридне морське судно (1) згідно з будь-яким з пунктів 1-7, яке відрізняється тим, що має бокові елементи корпусу (3), які складаються зі структурно інтегрованих або незалежно під'єднаних елементів, розташованих нижче рівня занурюваної частини палуби (8) 9 Високошвидкісне гібридне морське судно (1) згідно з будь-яким з пунктів 1-8, яке відрізняється тим, що має окремі бокові елементи корпусу (21), висота яких може регулюватися незалежно вздовж усієї довжини бокових елементів корпусу або ж в межах більшої частини їх довжини 10 Високошвидкісне гібридне морське судно згідно з будь-яким з пунктів 1-9, яке відрізняється тим, що має більший розмір, при цьому бокові елементи корпусу (3) розташовані один за одним по обидва боки від осьової лінії у поздовжньому напрямку, так що положення центра ваги судна по довжині розміщується між транцем задніх бокових елементів корпусу та носом передніх бокових елементів корпусу 11 Високошвидкісне гібридне морське судно (1) згідно з будь-яким з пунктів 1-9, яке відрізняється тим, що центральний елемент корпусу (2) оснащений одним або кількома баками водяного баласту (15) для швидкого спорожнення та заповнення водою за допомогою елементів (16, 17, 18, 25) 12 Високошвидкісне гібридне морське судно (1) згідно з будь-яким з пунктів 1-10, яке відрізняється тим, що має бак водяного баласту (15), з'єднаний із зануреною частиною центрального елемента корпусу (2), який (бак) має постійний отвір (16) в нижній частині зазначеного 49993 елемента корпусу, розташований попереду від транця (14) зазначеного елемента корпусу, і використовує гідростатичний і/або гідродинамічний водяний напір навколишньої води для швидкого заповнення бака, коли судно не рухається чи рухається вперед, та гідродинамічний тиск водяного потоку, що проходить нижче отвору для зменшення водяного баласту під час руху вперед за допомогою вертикального виступу (17) в нижній обшивці і структурно інтегрованої клиноподібної підошви (18) в задній частині отвору, або оснащений саморегульованим чи дистанційно керованим лотком (19) , розташованим за отвором, або ж оснащений дистанційно керованою плитою (20), розташованою в передній частині отвору і шарнірно закріпленою в точці (27) позаду вертикального виступу Цей винахід в цілому стосується морських суден і зокрема швидкісного гібридного корпусу на підводних крилах, що складається з вузького центрального елемента корпусу та двох чи більше бокових елементів, а саме судно в цілому діє у нормальному високошвид кісному режимі як над вузьке однокорпусне судно, стабілізоване підводними крилами Серед сучасних швидкісних суден катамарани протягом двох останніх десятиліть займали більш вигідну ринкову позицію, ніж монокорпусні судна, особливо з довжиною менше 100 метрів Катамаранам властиві простота в керуванні, висока ОСТІЙНІСТЬ і порівняно високі ШВИДКІСНІ та мореплавні характеристики, особливо в діапазоні швидкостей 30-35 вузлів Однак, все зростаючі вимоги до швидкісних характеристик суден призвели до появи кількох катамаранів, які можуть розвивати швидкість 45 вузлів і навіть більше 50 вузлів Мореплавні характеристики є також одними з найважливіших для сучасного високошвидкісного морського транспорту Необхідність задовільнити такі вимоги призвела до появи більших головних енергетичних установок та введення систем гасіння хитавиці, таких як Т-подібні ПІДВОДНІ крила в носовій частині судна та тримери або штерцептори в кормовій, що дозволило забезпечити підвищений комфорт під час руху Введення Т-подібних крил, що, по суті, являють собою тимчасові піднімальні пристрої, пов'язане з помітним гідродинамічним опором, який зменшує швидкість 40-45-вузлового катамарана на 2-3 вузли задовольняти потреби, що виникатимуть у майбутньому Ця теза також підтверджується підвищеною увагою до екологічних аспектів мореплавства з боку громадськості та владних структур, що, скоріш за все, матиме своїм наслідком розвиток якихось НОВІТНІХ ідей До того ж, вплив хвильових збурень, породжуваних швидкісними судами, на стан навколишнього середовища стає останнім часом все серйознішою регіональною проблемою Судна на підводних крилах, що перетинають поверхню води, були розроблені в середині п'ятидесятих років і випускалися серійно італійською фірмою "Rodnquez" Як відомо, вони являли собою однокорпусне судно, оснащене розташованими у носовій та кормовій частинах корпусу системою підводних крил, що перетинають поверхню води, поперечний переріз якої має V-подібну форму Таким чином частини системи крил виступають над ватерлінією з обох боків і забезпечують поперечний відновлювальний момент при крені судна, який супроводжується зануренням підводних крил, що перетинають водну поверхню Судно залишається повністю піднятим над водою при більших швидкостях, а схема розміщення підводних крил, що перетинають водну поверхню, забезпечує самостабілізацію по крену й тангажу Судно приводиться в дію повністю зануреними гребними гвинтами, змонтованими на похилих валах Перевагами такої принципової конструкції над традиційними однокорпусними суднами подібного розміру були покращені мореплавні властивості та коефіцієнт корисної дії енергетичної установки при робочій швидкості близько 35 вузлів Недоліками були складність конструкції, більша собівартість побудови, обмеження за вагою та швидкістю Тому повна довжина такої конструкції, як правило, не перевищує 40м, а максимальна водотоннажність 150т Судно такої конструкції стало дуже популярним як пасажирські пароми і навіть зараз багато таких суден експлуатується по всьому СВІТІ, особливо в краіних колишнього СРСР, в Японії, краіних Середземномор'я На думку винахідника, на СЬОГОДНІШНІЙ день, імовірно, немає іншого типу швидкісного судна, яке б перевезло таку КІЛЬКІСТЬ пасажирів Однак порівняння з сучасними типами високошвидкісних суден, таких як катамарани й однокорпусники, свідчить не на користь вищезгаданого судна, яке вже не витримує конкуренції в плані швидкісних характеристик і пасажирського комфорту, хоча ще й досі не поступається коефіцієнтом корисної дії енергетичної установки (коефіцієнтом Незважаючи на підвищення швидкісних вимог на певних маршрутах, більшість операторів швидких паромів все ще не наважується підтримувати таку тенденцію розвитку морського транспорту, оскільки це означатиме значне збільшення витрат палива Найімовірніше, катамаранна технологія, комерційний розвиток якої почався на початку семидесятих, досягла сьогодні оптимальної стадії свого розвитку з точки зору гідродинаміки Подальше зменшення гідродинамічного опору у значній мірі стримується тим, що головною складовою такого опору є гідродинамічне приповерхневе тертя Для його подолання потрібно або зменшувати площу змочуваної поверхні, або ж зменшувати приповерхневе тертя шляхом застосування нової технологи, типу повітряного змащування Відсутність випробуваних методів розв'язування таких технологічних задач вказує на те, що ідея катамарана у сьогоднішньому нашому розумінні вже неспроможна повністю 49993 ШВИДКОХІДНОСТІ) Один з найважливіших кроків у розвитку високошвид кісної морської технології було зроблено в середині семидесятих, коли компанія "Boeing" (США) розробила судно на підводних крилах з водометним рушієм "Jetfoil" Як і у випадку суден фірми "Rodnquez", основою нової конструкції є монокорпус, який піднімається вище рівня ватерлінії при зростанні швидкості Однак, система підводних крил відноситься до повністю зануреного типу і складається з однієї плоскої повністю зануреної системи підводних крил, яка підтримується трьома вертикальними стояками На відміну від системи крил, що перетинають поверхню води, нова система крил не забезпечує самостабілізацм і тому и положення може регулюватися керованими закрилками, змонтованими на задньому краю такої системи Первинна система крил, розмах якої сягає повної ширини судна, розташовується в його кормовій частині і забезпечує первинну стабілізацію по тангажу і крену Менша система крил (Т-подібна) розташовується на осьовій лінії попереду і підтримується вертикальним стояком Вона забезпечує вторинну підйомну силу та необхідний момент для регулювання тангажу Обидві системи крил можуть бути нахилені вверх, коли судно завантажене до величини його водотоннажності Нормальна робоча швидкість судна "Jetfoil" довжиною 27,4м і водотоннажністю 117т із зануреними крилами становить 45 вузлів Перевагами такої конструкції є ВІДМІННІ мореплавні характеристики та високий коефіцієнт корисної дії енергетичної установки Недоліками, на жаль, є висока вартість побудови, технічна складність конструкції, обмеження на повну вагу та вагу корисного вантажу На початку дев'яностих норвежці Квернер Фьєльстранд (Kvaerner Fjellstrand) і Вестамарш (Westamarm) запропонували ідею "кота на підводних крилах" (Foilcat) Це катамаран з системою повністю занурених підводних крил, що піднімає судно вище ватерлінії, який розвиває робочу швидкість близько 45 вузлів Найбільше судно такого типу має довжину 35 метрів і водотоннажність близько 175 тонн Конструкція описана в патенті Норвегії № 175199 і має, по суті, ті ж переваги й недоліки, що й судна типу "Jetfoil" Останні й обмежують и застосування На шляху зменшення великого фрікційного опору, що виникає під час руху катамаранів зі швидкостями близько 45 вузлів, нещодавно виникла одна ідея катамарана з підводними крилами, оснащеного системою повністю занурених крил, призначеною для часткового піднімання судна з води У той же час, така система крил дозволяє керувати тангажем і, в меншій мірі, креном і підйомним зусиллям Дві конструкції такого типу описані в патентах США № US 4606291 та US 4665853 Оскільки останні працюють в режимі неповного завантаження і самі по собі мають ще й два корпуси, занурені у воду, то їх застосування обмежене великим гідродинамічним опором руху Конструкція тримарана набуває останнім часом все більшого визнання серед фахівців 8 морського транспорту завдяки його високим швидкісним та мореплавним характеристикам Як відомо, тримаран складається з трьох повністю занурених елементів корпусу, що включають довгий і вузький центральний корпус та пару коротших аутрігерів або бокових корпусів, з'єднаних з нижньою частиною поперечної надбудови містка, розташованої в середній або кормовій частинах судна Однак, така конструкція ще не зайняла належного місця на ринку високошвидкісних паромів РІЗНІ варіанти згаданої конструкції описані в різних патентах і патентних заявках, таких як US 4348972, US 5178085, US 5529009, JP 63130492, WO 93/07046, WO 94/20359, WO 97/10988 та ЕР455605 Деякі з цих конструкцій включають піднімальні пристрої у вигляді Т-подібних крил, змонтованих на бокових корпусах і центральному корпусі для гасіння бортової та кільової хитавиці Однак, усі вони працюють лише в режимі сталого водотоннажу і мають зануреними усі три корпуси Гібридне морське судно на підводних крилах описане в патенті США № 5503100 Однак, здається, що цей конкретний винахід зіпсований численними непрактичними деталями, що, скоріш за все, робитиме його непридатним для застосування як високошвид кісного судна Причиною цьому є поєднання складної геометрії корпусу, нетрадиційне розміщення енергетичної установки та системи крил, що врешті решт призведе до надмірної повної ваги і гідродинамічного опору Ця нова конструкція, у своїй кращій версії, являє собою гібрид між монокорпусом і тримараном Як відомо, так зване число Фруда, яке визначається за формулою де v - швидкість (м/с), g - прискорення вільного падіння, L -довжина судна вздовж ватерлінії (м), визначає хвилетвірний опір судна Традиційні тримарани з повністю зануреними боковими корпусами мають тенденцію рухатися в режимі глісірування, коли довжина бокових корпусів мала, а швидкість досить висока Через необхідність забезпечення ОСТІЙНОСТІ, яка вимагає того, щоб висота метацентру була позитивною (+GM), виникає необхідність забезпечення відносно глибокого занурення бокового корпусу порівняно з його довжиною, що в цілому веде до ризику суттєвого зростання гідродинамічного опору, зумовленого збудженням хвиль, на великих швидкостях та збільшення числа Фруда Даний винахід базується на застосуванні геометрії гібридного корпусу, що складається з комбінації удосконаленого різновиду вищезгаданих тримаранів і монокорпусу, а саме з глибокого тонкого центрального елемента корпусу і щонайменше з двох тонких і мілких бокових елементів корпусу, приєднаних до судна за допомогою жорсткої палубної конструкції, що з'єднує бокові елементи з центральним елементом корпусу і може діяти у двох принципово різних режимах, а саме в гідростатичне стійкому низькошвид кісному режимі, у якому висота 49993 10 складі флотаційні елементи, висота яких може регулюватися по всій довжині бокових елементів або ж по більшій її частині, - центральний елемент корпусу, головним чином великого судна, комплектується баком водяного баласту з постійно відкритим отвором, розташованим в нижній обшивці вищезазначеного елемента на певній відстані від його транця, для забезпечення швидкого самозаповнення та спорожнення, бак також може бути оснащений засобами дистанційно керованого заповнення та спорожнення В рекомендованому виконанні винаходу судно оснащується 1) первинною системою повністю занурених підводних крил, призначеною для - форма центрального елемента корпусу створення підйомної сили, стабілізації бортової забезпечує велике відношення довжини судна хитавиці та гасіння вертикальної хитавиці, яка вздовж ватерлінії до його ширини вздовж розміщується під і між центральним та боковими ватерлінії, а також велике відношення ширини елементами корпусу поблизу положення центра головної палуби до ширини судна вздовж ваги по довжині (LCG) і поєднується до ватерлінії, центрального і бокових елементів корпусу та можливі форми поперечного перерізу розташованої між ними конструкції занурюваної центрального елемента корпусу нижче рівня частини палуби за допомогою вертикальних, занурення палуби в межах більшої частини можливо також похилих, стояків та 2) системи довжини останньої зображені на Фіг 4a-d і 4е-т вторинних підводних крил, призначеної для (можлива також їх комбінація), створення підйомної сили та керування тангажем, - бокові елементи корпусу мають висоту яка розміщується в кормовій частині судна, меншу (або значно меншу), ніж висота можливо також у носовій частині або носовій і центрального елемента корпусу, можуть мати кормовій частинах одночасно, і з'єднується за регульовану висоту і розміщуються у допомогою вертикальних стояків з центральним поздовжньому напрямку симетрично до осьової елементом корпусу та, в залежності від лінії судна таким чином, що їх більша частина поперечних розмірів системи підводних крил, з розташована ближче до корми відносно конструкцією занурюваної частини палуби положення центра ваги по довжині або ж поблизу цього положення, В іншому рекомендованому виконанні винаходу, особливо придатному для суден з принаймні одна первинна система довжиною понад 100м, судно оснащується двома гідродинамічних або підводних крил розташована первинними системами підводних крил з великим між центральним і боковими елементами корпусу відносним видовженням, призначених для нижче їх рівня і з'єднується з ними за допомогою створення підйомної сили, стабілізації бортової вертикальних стояків, а також з конструкцією хитавиці та контролювання тангажу Оскільки занурюваної частини палуби за допомогою судна таких розмірів звичайно матимуть щонайменше одного вертикального стояка з водотоннажність з повним грузом, що перевищує кожного боку осьової лінії судна, 1000 метричних тонн, то для оптимізацм повного принаймні одна вторинна система гідродинамічного опору руху можна зробити гідродинамічних або підводних крил розташована ширину підводного крила більшою за нормальну в кормовій і/або носовій частинах центрального ширину судна, що дозволить досягти відношення елемента корпусу і з'єднується з судном за величини підйомної сили до водотоннажності допомогою принаймні одного вертикального близько 50% при швидкості 40-45 вузлів Така стояка для кожної системи підводних крил, а також конструкція зображена на фіг 8 На фігурі показано до розташованої між центральним і боковими частини конструкції палуби, виступають у елементами корпусу занурюваної частини палуби, поперечному напрямку за межі нормальної гідродинамічні або ПІДВОДНІ крила ширини судна, для того щоб забезпечити опору розмішуються так, що центр гідродинамічного для ЗОВНІШНІХ стояків підводних крил Такі мостові підйому розташовується безпосередньо в або конструкції можуть використовуватися також на поблизу положення центра ваги по довжині, постах швартування, а також на станціях посадки і - величина гідродинамічної підйомної сили, що висадки пасажирів створюється системою підводних крил при максимальній швидкості руху становить не менше Для більших за розміром виконань винаходу, 20% найменшої ваги судна, наприклад, довжиною 200м чи більше, можна запропонувати три первинні системи підводних - бокові елементи корпусу складаються зі крил для створення потрібної підйомної сили У структурно інтегрованих або незалежно такому випадку їх слід розміщувати в кормовій, під'єднаних елементів, розташованих нижче носовій та центральній частинах судна занурюваної частини палуби, виготовлених з матеріалу для жорстких конструкцій або з гнучкого Згідно З ЦИМ винаходом, високошвидкісне ударопоглинального пружного матеріалу по всій гібридне морське судно має гідродинамічні або довжині палуби або ж по більшій її частині, ПІДВОДНІ крила, які забезпечують створення гідродинамічної підйомної сили та контролювання - бокові елементи корпусу мають у своєму метацентра є позитивною (+GM), а центральний і як мінімум один з бокових елементів корпусу занурені у воду, та гідростатичне нестійкому високошвидкісному режимі, у якому центральний елемент корпусу частково піднятий і частково занурений, а висота метацентра є негативною (GM), у той час як бокові елементи корпусу розташовуються частково або повністю над ватерлінією, причому перехід від одного режиму до іншого відбувається при гідродинамічному ПІДЙОМІ, за допомогою гідродинамічних або підводних крил для регулювання крену, підйомного зусилля і тангажу Судно має наступні особливості 12 11 49993 крену, вертикального зусилля та тангажу, і може - бокові елементи корпусу в рекомендованому працювати у двох принципово різних режимах, а виконанні винаходу розташовуються паралельно саме в гідростатичне стійкому низькошвидкісному поздовжній осьовій лінії судна або під невеличким режимі, у якому висота метацентра є позитивною кутом в напрямку до або від цієї лінії і орієнтовані (+GM), із зануреними у воду центральним і як симетрично відносно осьової лінії судна з обох мінімум одним з бокових елементів корпусу, та боків, гідростатичне нестійкому високошвид кісному бокові елементи корпусу можуть режимі, у якому висота метацентра є негативною розміщуватися, головним чином це стосується (-GM), а тонкий центральний елемент корпусу суден великих розмірів, один за одним з обох боків частково піднятий і частково занурений, у той час у поздовжньому напрямку, так що поздовжній як бокові елементи корпусу ПІДНЯТІ частково або центр ваги судна розміщуватиметься між транцем повністю над водою, коли вищезазначене судно кормових бокових елементів корпусу і носом динамічно стабілізується системою підводних передніх бокових елементів, крил, що складається з - занурювана частина палуби у поздовжньому напрямку поширюється від верхньої і найдальшої - центрального елемента корпусу, який є частини носів бокових елементів корпусу до частиною суцільної жорсткої палубної конструкції, транця центрального елемента корпусу і має у яка у поперечному напрямку виступає за межі поздовжньому напрямку форму дуги з кінцями, ширини центрального елемента корпусу і де розташованими вище будь-яких точок на самій нижня поверхня згаданої палубної конструкції, дузі, або ж лежить повністю чи частково у площині, означена як занурювана частина палуби, що збігається з горизонтальною чи лежить під розташовується вище ватерлінії, коли судно деяким кутом до неї, причому кормовий край нерухоме в неушкодженому стані, і на все більшій розташовується вище точок площини занурюваної висоті над середньою ватерлінією при значному частини палуби, що лежать між кормою та носом зростанні швидкості переднього ходу судна, судна, або ж вона може мати форму дуги у своїй - відношення найбільшої ширини набору середній частині і розташованих під кутом до корпусу судна над ватерлінією до найбільшої горизонту ЛІНІЙ у кормовій та носовій частинах ширини набору центрального елемента корпусу на судна, рівні ватерлінії для будь-яких умов плавання прямостоячого судна в неушкодженому стані не - вищезгадана занурювана частина палуби у менше 2, поперечному напрямку орієнтована горизонтально або під деяким кутом, так що точка на ній, відношення найбільшої довжини розташована далі від осьової лінії судна, лежить центрального елемента корпусу вздовж ватерлінії на тій же висоті або вище, ніж точка, розташована до найбільшої ширини вздовж ватерлінії в режимі ближче до осьової лінії плавання прямостоячого неушкодженого судна не менше 6, В рекомендованому виконанні винаходу центральний елемент корпусу має гібридне морське судно, крім вже згаданих прямокутний або трапецієподібний поперечний елементів, має ще й сукупність повністю переріз нижче рівня занурення палуби в кормовій занурених первинних гідродинамічних або и частині, який поступово переходить в U-, V- та Yпідводних крил, повний розмах яких складає не подібний у носовій частині, менше 50% (а рекомендується навіть до 100%) найбільшої загальної ширини судна, причому - судно має щонайменше один набір бокових зазначене підводне крило розташовується елементів корпусу, розміщених так, що один набір поблизу поздовжнього центра ваги судна або, складається з одного бокового елемента, точніше, дещо попереду від цієї точки, і розташованого на кожному з боків поздовжньої з'єднується з центральним елементом корпусу, осьової лінії судна і з'єднаного нижче занурюваної занурюваною частиною палуби і боковими частини палуби, а висота цього бокового елемента елементами корпусу, при цьому занурювана менша (або значно менша) за висоту частина палуби або палуба загалом може в центрального елемента корпусу, так що відповідне поперечному напрямку сягати або виступати за відношення не перевищує 0,7, причому висота згадані бокові елементи корпусу в залежності від вимірюється від найнижчої суцільної частини поперечного розміру системи підводних крил, за палуби, починаючи від корми до носа, до допомогою двох і більше вертикальних і/або найнижчої частини днищ зазначених бокових похилих стояків, які передають судну елементів корпусу, гідродинамічну підйомну силу, звичайно - бокові елементи корпусу в рекомендованому направлену вверх, і де розміщується один, краще виконанні винаходу розташовуються повністю або декілька, дистанційно керований закрилок з частково в межах ширини вищеозначеної кожного боку від осьової лінії судна, під'єднаний найнижчої суцільної частини палуби, до задньої кромки підводного крила, який - бокові елементи корпусу в рекомендованому забезпечує потрібну гідродинамічну ОСТІЙНІСТЬ, виконанні винаходу розміщуються так, що їх надаючи керований поперечний відновлювальний більша частина лежить в кормовій частині момент відносно осьової лінії судна під час відносно поздовжнього центра ваги судна, поступального руху судна на підвищеній - бокові елементи корпусу в рекомендованому швидкості, при якому бокові елементи корпусу виконанні винаходу розміщуються так, що в частково занурені або повністю ПІДНЯТІ над поздовжньому напрямку іхтранці розташовуються ватерлінією ближче до корми відносно транця центрального елемента корпусу, У наступному рекомендованому виконанні 13 49993 14 винаходу, гібридне морське судно містить конструкцію, яку утворює щонайменше одне повністю занурене вторинне гідродинамічне або підводне крило, повний поперечний розмах якої менше 50% найбільшої повної ширини судна, а один з наборів згаданої конструкції вторинного підводного крила розташований на значній відстані у бік корми від поздовжнього центра ваги судна і з'єднаний з центральним елементом корпусу і/або занурюваною частиною палуби за допомогою щонайменше одного стояка на кожен з наборів підводних крил, який передає судну гідродинамічну підйомну силу, і на якій (конструкції) як мінімум один дистанційно керований закрилок на кожен з наборів підводних крил поєднується до задньої кромки крила для забезпечення необхідного моменту для регулювання тангажу відносно поздовжньої точки повороту, створюючи керований поздовжній відновлювальний момент під час руху судна вперед зі збільшеною швидкістю морського судна (1) з центральним (2) та боковими (3) елементами корпусу Під судном зображено систему первинних підводних крил (4) і вертикальні стояки (11), а також систему вторинних підводних крил (5) Як уже зазначалося, конструкція, що складається з первинної системи гідродинамічних або підводних крил (4), розташовується між центральним (2) і боковими (3) елементами корпусу, які створюють головну гідродинамічну підйомну силу, в результаті чого зменшується осадка і площа зануреної частини корпусу, а також забезпечується динамічна ОСТІЙНІСТЬ завдяки використанню системи підводних крил, що перетинають водну поверхню (6), як це показано на Фіг 9, або, ще краще, системи повністю занурених крил (4), підтримуваних вертикальними стояками (11), як це показано на Фіг 2, що мають повністю керовану систему підводних крил, або, ще краще, керовані закрилки (27), з'єднані вздовж задньої кромки (29) згаданого підводного крила Фігури Цей винахід буде розглянуто нижче з використанням наступних рисунків - на Фіг 1 зображено вид збоку гібридного морського судна, - на Фіг 2 представлено судно, зображене на Фіг 1, з поперечним перерізом, проведеним посередині судна через первинне підводне крило, а також через центральний елемент корпусу, занурювана частина палуби та бокові елементи корпусу, - на Фіг 3 зображено кормовий переріз судна, на якому показано ватерлінію (WL-1) у високошвидкісному режимі, ватерлінію при малій швидкості судна (WL-2), положення центра ваги по ширині (VCG) і метацентра в режимі малої (М) та великої (М2) швидкостей судна, - на Фіг 4a-4d показано можливі форми поперечного перерізу кормової частини центрального елемента корпусу нижче рівня занурення палуби, - на Фіг 4е-4т показано можливі форми поперечного перерізу носової частини центрального елемента корпусу нижче рівня головної палуби, - на Фіг 5 зображено вид судна винаходу ззаду та показано регульовані бокові елементи корпусу, - на Фіг 6 зображено поперечний переріз деталей елементів плавучості з регульованою висотою, об'єднаних у бокові елементи корпусу судна винаходу із поясненням принципу дії, - Фіг7а-7д ілюструють принцип дії системи водяного баласту, - Фіг 8 являє собою схему судна великих розмірів з двома наборами первинних підводних крил і подвійними наборами бокових елементів корпусу, - на Фіг 9 подано поперечний переріз судна з первинним підводним крилом, що перетинає водну поверхню, Фіг 10 являє собою схему повністю зануреного первинного підводного крила, на якій зображено передню і задню кромки, довжину хорди (CL) та керовані закрилки На Фіг 1 зображено профіль гібридного (4) При швидкості 45 вузлів гідродинамічна підйомна сила, створювана системою підводних крил, може сягати величин, що відповідають 2090% водотоннажності ненавантаженого судна в залежності від розмірів системи крил та водотоннажності судна В результаті судно під час руху підніматиметься з води настільки, що бокові елементи корпусу будуть частково або повністю ПІДНЯТІ над ватерлінією Це надає судну головну перевагу за величиною гідродинамічного опору над традиційним катамараном, який піднімається аналогічним чином під час руху Головною причиною такого прогресу є те, що, згідно з цим винаходом, площа зануреної частини центрального елемента корпусу менша за сумарну площу обох корпусів катамарана при одній і тій же повній водотоннажності Цей факт, разом з ефектами, зумовленими створенням підйомної сили підводними крилами, призводить до суттєвого зменшення площі зануреної поверхні А це, в свою чергу, веде до суттєвого зменшення приповерхневого тертя, що є особливо привабливим для створення високошвид кісних транспортних засобів В протилежність традиційним катамаранам, які характеризуються великою висотою метацентра (GM), що забезпечує високу гідростатичну СТІЙКІСТЬ або ОСТІЙНІСТЬ до бортового крену, судно, згідно з цим винаходом, спочатку має меншу гідростатичну ОСТІЙНІСТЬ при малих кутах нахилу (відхилення від вертикалі), коли судно перебуває нерухомим на воді При зростанні швидкості і появі підйомної сили, створюваної системою підводних крил, гідростатична СТІЙКІСТЬ ще зменшується При достатньо великій швидкості і ПІДЙОМНІЙ СИЛІ бокові елементи корпусу піднімаються на рівнем води і судно переходить у гідростатичне повністю нестійкий стан Такий стан характеризується негативною висотою метацентра (-GM), яка звичайно визначається як відстань між положенням центра ваги по ширині судна (VCG) та уявним метацентром (М) вздовж вертикальної прямої, що перетинає осьову ЛІНІЮ судна При малих кутах відхилення від вертикалі згадана 16 15 49993 вертикальна пряма перетинатиме сама себе в викликають бортову хитавицю Це проявляється у певній точці, звичайно вище положення центра тому, що судно цього винаходу буде зазнавати ваги по ширині (VCG) Чим вище метацентр бортову хитавицю незначної амплітуди або ж не розташовується над цією точкою, тим вищою буде зазнаватиме и зовсім в залежності від висоти гідростатична СТІЙКІСТЬ І може бути досягнуто хвиль, у той час як досягти цього на катамарані позитивної висоти метацентр (+GM) Нестійке неможливо, навіть якщо останній буде оснащено судно, таким чином, звичайно асоціюється з системою підводних крил такої ж потужності малою позитивною або ж від'ємною висотою Оскільки зануреним у воду є лише метацентра (-GM), яка означає, що він центральний елемент корпусу, причому площа розташовується нижче положення центра ваги по зануреної поверхні є, як правило, значно меншою, ширині (VCG) ніж у катамарана або традиційного монокорпусного судна, то це дозволяє значно На Фіг 4, як зазначалося вище, зображено різні зменшити вертикальну хитавицю, їх вдається геометричні форми центрального елемента зменшити й далі завдяки поєднанню пасивного й корпусу, що є лабільними або гідростатичне активного вертикального демпфірування за нестійкими форми корпусу для вказаного допомогою порівняно великого первинного положення ватерлінії (WL-1) підводного крила, розташованого поблизу На Фіг 4a-4d зображено чотири можливі положення центра ваги по довжині (LCG), як це форми поперечного перерізу корпусу в кормовій показано на Фіг 1 частині центрального елемента корпусу нижче рівня занурення палуби Як показано на рисунку, В нормальному робочому режимі, коли поперечний переріз корпусу може мати чітко швидкість судна звичайно становить величину 40окреслену прямокутну, U-подібну або 50 вузлів, судно матиме певний запас динамічної трапецієподібну форми, що поступово переходять СТІЙКОСТІ по відношенню до бортової хитавиці, в U-, V- та Y-подібні форми в носовій частині спричиненої поперечними хвилями, який може корпусу Праворуч на рисунку показано різні бути таким, як і у суден "Foilcat", що повністю опорні рівні, а саме, ватерлінія (WL-1), рівень піднімаються над водою під час руху Це зануреної частини палуби (8) і рівень головної зумовлено тим, що бокові елементи корпусу палуби (7) мають значно меншу водотоннажність, ніж бокові елементи корпусу суден типу "Foilcat" Що ж Нарешті на Фіг 4е-4т зображені можливі стосується кільової хитавиці, то вторинне підводне форми поперечного перерізу носової частини крило, або балансувальне крило, розташоване в центрального елемента корпусу нижче рівня кормовій або носовій частинах центрального головної палуби (7) Як показано на рисунках, елемента корпусу, буде найбільше гасити кільову поперечний переріз може мати чітко окреслену V-, хитавицю Це забезпечує судну, згідно з цим U- або Y-подібну форму, або ж форму, що є винаходом, унікальні мореплавні характеристики комбінацією останніх Принцип забезпечення динамічної ОСТІЙНОСТІ При проектуванні такого судна потрібно гібридного морського судна цього винаходу є в приділяти особливу увагу таким параметрам як цілому подібним до тих, що використовуються на висота і плавучість центрального та бокових сучасних реактивних винищувачах Як відомо, елементів корпусу, положення центра ваги по літаки такого типу є аеродинамічне нестійкими і не ширині (VCG), положення центра ваги по довжині можуть керуватися вручну, на відміну від (LCG) та центра підйомної сили системи крил традиційних стійких літаків, які можуть керуватися Створення судна з оптимальними пілотами Тому керування ними здійснюється за експлуатаційними характеристиками вимагає допомогою комп'ютерів, аналогічно тому, як це дотримання тонкої рівноваги та компромісу між відбувається для судна цього винаходу Не має описаними вище факторами потреби говорити, що вони (літаки) є статично Коли судно рухається вперед на незначній стійкими, коли спираються на колеса на землі, швидкості або є нерухомим на водній поверхні, аналогічно тому, як це має місце для даного тоді створювана підводними крилами підйомна гібридного судна, коли воно нерухоме або сила є незначною або взагалі відсутня Отже, рухається з малою швидкістю Більш наочним осадка зросте і обидва бокові елементи корпусу прикладом може слугувати велосипед, який є (3) будуть занурені у воду до рівня ватерлінії (WLстатично нестійким і якого не можна врівноважити 2), показаного на Фіг 1 і 3 Бокові елементи корпусу без надання йому відновлювального моменту забезпечуватимуть таким чином необхідну гідростатичну ОСТІЙНІСТЬ Умова відсутності статичної ОСТІЙНОСТІ Є дуже корисною для досягнення високого комфорту під Метод регулювання бокових елементів час руху шляхом використання ефекту активної корпусу проілюстровано на Фіг 5 і 6 В принципі, динамічної стабілізації, який забезпечується регулювання бокових елементів корпусу (3) може керованими закрилками підводного крила Дія проводитися за допомогою будь-яких технічно ЗОВНІШНІХ збурювальних сил, представлених можливих прийомів, наприклад, за допомогою ударами хвиль об корпус, буде при цьому значно ВІДПОВІДНОГО елемента плавучості (21), який меншою, оскільки судно винаходу виштовхується зі свого відсіку (22), розташованого характеризується негативною висотою метацентра всередині бокового елемента корпусу поршнем, (-GM), на відміну від традиційного катамаранного що приводиться в дію вприскуваною в поршневий судна, яке характеризується позитивною висотою пристрій рідиною, який рухає вказаний елемент метацентра (+GM) Це особливо яскраво вниз до тих пір, поки він не зануриться у воду на проявляється у випадку дії поперечних хвиль, що значну глибину, як це показано на Фіг 5 Таким 17 чином можна забезпечити ОСТІЙНІСТЬ гідростатичне нестійкого центрального елемента корпусу Глибину занурення елементів плавучості можна плавно регулювати, навіть тоді, коли відсутня стабілізувальна система підводних крил Інший метод полягає в тому, що елементи плавучості, з'єднані з боковими елементами корпусу, підтримуються у нижньому положенні з певною глибиною або водотоннажністю, коли судно рухається вперед з малою швидкістю або стоїть у воді нерухоме Коли швидкість зростає і система підводних крил забезпечує потрібну динамічну ОСТІЙНІСТЬ, зазначені елементи плавучості тимчасово піднімаються на задану висоту над рівнем води Таке положення елементів плавучості (21) можна забезпечити, якщо вони приєднані до розташованої над ними змочуваної частини палуби (8) за допомогою сукупності пневматичних або гідравлічних приводів (23), розташованих між ними (8, 21), а також за допомогою герметичної, наповненої повітрям еластичної мембрани (24), з'єднаної з регульованими елементами плавучості та з розташованою над ними змочуваною частиною палуби Приводи (23) можуть під'єднуватися до спільного або індивідуальних акумуляторів тиску, які забезпечують потрібну величину постійного тиску, так що приводи і регульовані елементи підтримуються у постійному нижньому положенні, підтримувані еластичною мембраною (24), яка оточує з усіх боків вищезгадані елементи і розташовані всередині приводи Піднімання елементів плавучості забезпечується подачею негативного тиску до внутрішнього об'єму (22) всередині еластичної мембрани за допомогою електричних вакуумних насосів Завдяки цьому відносно велика площа внутрішньої поверхні буде створювати достатню силу вертикального підйому, що перевищуватиме протилежні їй вертикальні сили, створювані гідравлічними або пневматичними приводами (23) під тиском, так що зазначені приводи перебуватимуть під тиском, що призвод йтиме до тимчасового піднімання елементів плавучості у верхнє положення Електричні вакуумні насоси можуть запускатися вручну з судового містка, у той час як сигнал контролера, який їх відключатиме, може генеруватися постійно діючою електронною системою зворотного зв'язку судна, елементами якої є гідродинамічний лаг та індикатор бортової хитавиці Це забезпечуватиме автоматичне відключення вакуумних насосів за певних умов або в певних ситуаціях, наприклад, при заданому максимальному куті бортового крену або при мінімальній швидкості руху Елементи плавучості при цьому будуть автоматично понижатися у своє звичайне занурене положення Недоліком описаного вище методу є його відносна складність і дороговизна Оснащеня такою системою судна невеликих розмірів (3060м) призведе до відносно значного зростання його ваги Для судна ж великих розмірів цього може і не відбуватися, оскільки вагу можна буде фактично зменшити, в залежності від повного розміру судна і фактичного рівня зануреної частини палуби відносно ватерлінії Позитивним 49993 18 моментом є те, що такий метод дозволяє зменшити осадку бокових елементів корпусу, коли судно перебуває у високошвидкісному режимі, в результаті чого зменшиться імовірність взаємодії бокових елементів корпусу з хвилями Порівняно з методом водяного баласту, який буде описано нижче, даний метод дозволяє зменшити максимальну осадку, а також опір руху на малій швидкості, оскільки не відбуватиметься зростання водотоннажності при малих швидкостях Інший метод полягає в тому, що судно оснащується окремим баком водяного баласту (15), зображеного на Фіг 1 і 7, з'єднаного з днищем центрального елемента корпусу (2) і розташованого на деякій відстані попереду транця судна, переважно ближче до корми від положення центра ваги по довжині (LCG) В кормовій частині бака розташовується отвір певної форми (16) на заданій відстані назад від вертикального виступу (17) на нижній обшивці Коли судно нерухоме чи рухається вперед зі швидкістю, що не перевищує заданого значення, у бак потраплятиме вода, як показано на Фіг 7Ь Максимальна швидкість, при якій це відбуватиметься, визначається поздовжньою довжиною отвору (16) і відстанню по вертикалі між розташованим попереду виступом (17) і розташованою позаду підошвою (18), а також гідростатичним водяним напором Коли швидкість перевищує це значення, тоді водяний потік розділятиметься вертикальним виступом (17) При зростанні швидкості напрям водяного потоку буде все більше і більше наближатися до вертикальної площини до тих пір, поки при певному значенні швидкості вода вже перестане потрапляти на підошву нахиленої кормової частини отвору, а почне проходити під нею, як показано на Фіг 7а За таких умов баластний бак вже не буде зачерпувати воду, а буде поступово спорожнюватися за так званим ежекторним принципом, поки не стане зовсім порожнім При певній меншій швидкості руху судна водяний потік знову почне потрапляти на підошву, розділятися і наповнювати бак до повного заповнення останнього Бак оснащений повітряною трубою (25) для атмосферної вентиляції з метою уникнення внутрішньої вакуумізаци та створення в баку надлишкового тиску Реалізація вищеописаного методу вимагає певної ідеалізації, а саме, потрібно, щоб гідростатичний водяний напір, що визначається тягою судна, був приблизно сталим Звичайно, це не завжди може мати місце, оскільки він залежить від навантаження судна, тангажу, величини створюваної підводними крилами підйомної сили та хвиль Щоб уникнути цієї проблеми, пропонується установити в кормовій частині вищезгаданого отвору керований клиноподібний лоток (19), як показано на Фіг 7Ь Він закріплюється на шарнірі (27) в кормовій частині отвору, так що його кутове положення може вільно регулюватися вверх і вниз Бажано, щоб нижня поверхня лотка мала дугоподібну форму у поздовжньому напрямку Передня кромка лотка має клиноподібну форму з тим, щоб спростити розділення водяного потоку Коли судно нерухоме або рухається вперед зі швидкістю, меншою 19 49993 певного значення, лоток буде нахилений вниз у вертикальній площині, як показано пунктирними ЛІНІЯМИ на Фіг 7d, так що кромка лотка досить сильно виступатиме відносно нижнього краю виступу (17) з тим, щоб забезпечити зачерпування води в бак В залежності від вертикального положення кромки лотка відносно нижнього краю виступу кут нахилу закріпленого на шарнірі лотка при певній швидкості руху судна зміниться сам по собі, якщо на кромку лотка не буде потрапляти водяний потік При цьому зачерпування води зменшиться і бак поступово почне спорожнюватися За таких умов лоток буде глісірувати по поверхні водяного потоку під дією сил, що виникають при ковзанні во водяній поверхні, і вертикального моменту відносно осі шарніра лотка, якщо останній не закріплено Як тільки швидкість перевищить задану величину, кут нахилу лотка зміниться сам собою і підлаштується під незначні зміни поверхні водяного потоку, викликані креном і хвилями При цьому кромка лотка не буде торкатися водної поверхні Коли швидкість руху вперед знову зменшиться нижче певного значення, то тоді водяний потік потраплятиме на кромку лотка, розділятиметься і знову наповнюватиме бак Якщо з'єднати лоток з дистанційно керованим гідравлічним приводом, то можна в більшій мірі керувати кутовим положенням лотка і таким чином наповнювати і спорожнювати бак більш незалежно від швидкості руху судна вперед (V) 20 шарнірне закріплений лоток замінено постійною підошвою, як це було в першому методі, а перед отвором розміщується закріплена на шарнірі плита (20) Плита з'єднана з приводом (26), дистанційно керованим з судового містка, так що вона може нахилятися у вертикальному напрямку відносно осі розташованого попереду шарніра (27) Коли плита перебуває у нижньому положенні, водяний потік розділяється на кормовій частині плити і проходить під підошвою при певних швидкостях руху вперед і кутах нахилу плити Якщо плиту трохи піднято вверх, то водяний потік приставатиме до плити при певних кутах и нахилу та швидкостях руху вперед (v) і потраплятиме в бак Цей метод безпечніший і привабливіший з точки зору керування порівняно з описаним вище методом з використанням лотка Як і у випадку дистанційно керованого лотка, заповнення і спорожнення бака може контролюватися більш незалежно від швидкості руху судна і крену, однак останній метод, скоріш за все, менш підвладний аварійним ситуаціям В залежності від об'єму бака і його поздовжнього розташування, описана вище швидкодійна система водяного баласту може використовуватися для забезпечення потрібного ступеня занурення бокових елементів корпусу судна, що у свою чергу означає швидкий перехід судна від динамічної до статичної ОСТІЙНОСТІ Звичайно, такий перехід можна прискорити (полегшити) шляхом використання балансувального підводного крила Перевагою цього методу є простота в експлуатації Кращою альтернативою вищеописаному методу є метод, проілюстрований на Фіг 7f-g Тут Фіг 1 Фіг 2 49993 21 Фіг.З 8 24 І ФІГ.6 22 23 49993 24 С J Фіг.7а Фіг.7Ь Фіг.7с = ^ ^ - ^ "-J Лі Фіг.7д Фіг.8 WL-1 25 49993 Фіг 11 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 26
ДивитисяДодаткова інформація
Назва патенту англійськоюHigh-speed hybrid marine vessel
Назва патенту російськоюВысокоскоростное гибридное морское судно
МПК / Мітки
МПК: B63B 1/16, B63B 39/00, B63B 1/10
Мітки: високошвидкісне, морське, судно, гібридне
Код посилання
<a href="https://ua.patents.su/13-49993-visokoshvidkisne-gibridne-morske-sudno.html" target="_blank" rel="follow" title="База патентів України">Високошвидкісне гібридне морське судно</a>
Морське судно
Номер патенту: 27081
Опубліковано: 28.02.2000
Автор: РОККОТЕЛЛІ Сабіно
МПК: B63B 1/10
Формула / Реферат:
1. Морское судно, содержащее один центральный и два боковых корпуса, поддерживающих грузовую платформу, причем от днищ корпусов проходят вниз соответствующие стабилизаторы, а также содержащее основной движитель и элементы управления, отличающееся тем, что вертикальное продольное сечение грузовой платформы имеет профиль крыла для создания аэродинамической подъемной силы при движении судна, а в нижней части упомянутых стабилизаторов установлены...
Судно підкладне
Номер патенту: 1298
Опубліковано: 17.06.2002
Автори: Аркатов Павло Павлович, Слуцький Ігор Павлович
МПК: A61G 9/00
Формула / Реферат:
Судно підкладне, яке складається з корпусу з отвором, яке відрізняється тим, що корпус виконаний в вигляді совка та обладнаний кришкою для закривання, а як матеріал для його виготовлення використовують суміш поліпропілену та поліетилену низького тиску.
Судно підкладне
Номер патенту: 1297
Опубліковано: 17.06.2002
Автори: Аркатов Павло Павлович, Слуцький Ігор Павлович
МПК: A61G 9/00
Формула / Реферат:
Судно підкладне, яке складається з корпусу із отвором і зливним патрубком, яке відрізняється тим, що корпус виконаний розбірним і складається із суцільнолитих верхнього та нижнього півкорпусів із півпатрубками, судно обладнане кришкою для закривання, а як матеріал для його виготовлення використовують суміш поліпропілену та поліетилену низького тиску.
Судно спортивне з реактивною тягою
Номер патенту: 45430
Опубліковано: 15.04.2002
Автор: Бурлака Трохим Андрійович
МПК: B63H 11/00, B63B 35/73
Мітки: тягою, спортивне, реактивною, судно
Формула / Реферат:
1. Судно спортивне а реактивним тяглом, що містить корпус, установлені в корпусі рушій, привід рушія і пульт керування, яке відрізняється тим, що рушій складається з розташованих у кормовій частині судна бака, з’єднаного з реактивними соплами, і установлених на ньому двох ємкостей з еластичними стінками, з’єднаних через клапани з баком і з трубопроводом подачі забортної води, причому ємкості мають кришки з розміщеними на них вагами, з’єднані...
Мале однопалубне швидкісне судно
Номер патенту: 1460
Опубліковано: 15.10.2002
Автори: Третяков Михайло Григорович, Падалко Віктор Григорович, Мокеєв Юрій Геннадійович, Немчин Олександр Федорович, Безазієв Лентун Романович
МПК: B63B 3/00
Мітки: мале, однопалубне, швидкісне, судно
Формула / Реферат:
1. Мале однопалубне швидкохідне судно, що містить корпус, палубу, ходову рубку та моторний відсік, яке відрізняється тим, що корпус з'єднаний з палубою через пружну ущільнювальну прокладку, моторний відсік сполучений з ходовою рубкою через люк, виконаний у палубі, при цьому ходова рубка встановлена на перекритті, що утворює півбак, також через пружну ущільнювальну прокладку і об'єднана в єдиний блок із прибудовами, розташованими власне за...
Попередній патент: Пристрій для потоншення намелу вугільного пилу
Наступний патент: Спосіб циклічної стимуляції сердця із середньою швидкістю вище характерної та пристрій для його здійснення
Випадковий патент: Фрикційний диск