Спосіб визначення місцеположення об’єктів у двовимірному просторі
Номер патенту: 107886
Опубліковано: 25.02.2015
Автори: Савочкін Дмитро Олександрович, Гімпілевич Юрій Борисович
Формула / Реферат
Спосіб визначення місцеположення об'єктів у двовимірному просторі на основі системи радіочастотної ідентифікації та просторової локалізації, яка складається зі зчитувача, набору з ![]() антен, блока локалізації та набору радіоміток з унікальними ідентифікаторами, що розміщуються на об'єктах локалізації, розташованих в зоні локалізації, який полягає в тому, що послідовно виконують попередній та робочий етапи, причому під час попереднього етапу зону локалізації ділять на відповідне число осередків, після чого по черзі в кожен з цих осередків поміщають зразкову радіомітку, вимірюють
антен, блока локалізації та набору радіоміток з унікальними ідентифікаторами, що розміщуються на об'єктах локалізації, розташованих в зоні локалізації, який полягає в тому, що послідовно виконують попередній та робочий етапи, причому під час попереднього етапу зону локалізації ділять на відповідне число осередків, після чого по черзі в кожен з цих осередків поміщають зразкову радіомітку, вимірюють ![]() раз рівні сигналів відповідей зразкової радіомітки, посланих нею у відповідь на запитальні сигнали кожної з
раз рівні сигналів відповідей зразкової радіомітки, посланих нею у відповідь на запитальні сигнали кожної з ![]() антен, і зберігають отримані значення рівнів сигналів відповідей у таблиці рівнів сигналів відповідей, під час робочого етапу відповідне число раз виконують процеси комунікації зчитувача за допомогою кожної з антен із радіомітками, в результаті чого для кожної радіомітки, що відповіла зчитувачу, формується вектор
антен, і зберігають отримані значення рівнів сигналів відповідей у таблиці рівнів сигналів відповідей, під час робочого етапу відповідне число раз виконують процеси комунікації зчитувача за допомогою кожної з антен із радіомітками, в результаті чого для кожної радіомітки, що відповіла зчитувачу, формується вектор ![]() усереднених рівнів сигналів відповідей радіомітки, прийнятих за допомогою антен, після чого для кожної радіомітки, що відповіла зчитувачу, розраховують умовну густину ймовірності
усереднених рівнів сигналів відповідей радіомітки, прийнятих за допомогою антен, після чого для кожної радіомітки, що відповіла зчитувачу, розраховують умовну густину ймовірності ![]() місцезнаходження радіомітки в зоні локалізації за умови того, що за допомогою антен від даної радіомітки отримані сигнали відповідей з усередненими рівнями
місцезнаходження радіомітки в зоні локалізації за умови того, що за допомогою антен від даної радіомітки отримані сигнали відповідей з усередненими рівнями ![]() , як добуток
, як добуток ![]() функцій
функцій ![]() , що є умовними густинами ймовірності місцезнаходження радіомітки в зоні локалізації за умови того, що за допомогою n-ї антени від даної радіомітки отримані сигнали відповідей з усередненим рівнем
, що є умовними густинами ймовірності місцезнаходження радіомітки в зоні локалізації за умови того, що за допомогою n-ї антени від даної радіомітки отримані сигнали відповідей з усередненим рівнем ![]() , причому функція
, причому функція ![]() визначається функцією правдоподібності
визначається функцією правдоподібності ![]() отримання усередненого рівня
отримання усередненого рівня ![]() в результаті прийому за допомогою n-ї антени сигналів відповідей від радіомітки в точці
в результаті прийому за допомогою n-ї антени сигналів відповідей від радіомітки в точці ![]() зони локалізації, яка розраховується як усереднена сума
зони локалізації, яка розраховується як усереднена сума ![]() одновимірних гаусових функцій змінної
одновимірних гаусових функцій змінної ![]() у кожної k-ї з яких математичне сподівання визначається рівнем сигналу відповіді зразкової радіомітки, узятим з таблиці рівнів сигналів відповідей, прийнятим за допомогою n-ї антени в осередку зони локалізації з координатами
у кожної k-ї з яких математичне сподівання визначається рівнем сигналу відповіді зразкової радіомітки, узятим з таблиці рівнів сигналів відповідей, прийнятим за допомогою n-ї антени в осередку зони локалізації з координатами ![]() при k-му номері вимірювання в ході виконання попереднього етапу, який відрізняється тим, що під час робочого етапу для кожної радіомітки, що відповіла зчитувачу, додатково формується множина
при k-му номері вимірювання в ході виконання попереднього етапу, який відрізняється тим, що під час робочого етапу для кожної радіомітки, що відповіла зчитувачу, додатково формується множина ![]() номерів антен, за допомогою яких щонайменше один раз були прийняті сигнали відповідей від радіомітки, та вектор
номерів антен, за допомогою яких щонайменше один раз були прийняті сигнали відповідей від радіомітки, та вектор ![]() коефіцієнтів відповідей радіомітки антенам, після чого для кожної радіомітки, що відповіла зчитувачу, розраховують умовну густину ймовірності
коефіцієнтів відповідей радіомітки антенам, після чого для кожної радіомітки, що відповіла зчитувачу, розраховують умовну густину ймовірності ![]() місцезнаходження радіомітки в зоні локалізації за умови того, що сигнали відповідей від даної радіомітки прийняті антенами з номерами
місцезнаходження радіомітки в зоні локалізації за умови того, що сигнали відповідей від даної радіомітки прийняті антенами з номерами ![]() , яка задається у вигляді
, яка задається у вигляді ![]() для точок, що належать результуючій зоні радіомітки,
для точок, що належать результуючій зоні радіомітки, ![]() для точок, що належать об'єднанню зон дії антен із номерами
для точок, що належать об'єднанню зон дії антен із номерами ![]() та не належать результуючій зоні радіомітки,
та не належать результуючій зоні радіомітки, ![]() для точок, що не належать об'єднанню зон дії антен із номерами
для точок, що не належать об'єднанню зон дії антен із номерами ![]() , причому величини
, причому величини ![]() та
та ![]() вибирають зі співвідношення
вибирають зі співвідношення ![]() , а результуючу зону радіомітки визначають як результат теоретико-множинної операції різниці області перетину зон дії антен із номерами
, а результуючу зону радіомітки визначають як результат теоретико-множинної операції різниці області перетину зон дії антен із номерами ![]() та області об'єднання зон дії всіх інших антен, крім того для кожної радіомітки, що відповіла зчитувачу, розраховують умовну густину ймовірності
та області об'єднання зон дії всіх інших антен, крім того для кожної радіомітки, що відповіла зчитувачу, розраховують умовну густину ймовірності ![]() місцезнаходження радіомітки в зоні локалізації за умови того, що коефіцієнти відповідей даної радіомітки антенам дорівнюють
місцезнаходження радіомітки в зоні локалізації за умови того, що коефіцієнти відповідей даної радіомітки антенам дорівнюють ![]() , як добуток
, як добуток ![]() функцій
функцій ![]() , що є умовними густинами ймовірності місцезнаходження радіомітки в зоні локалізації за умови того, що коефіцієнт відповіді даної радіомітки n-й антені дорівнює
, що є умовними густинами ймовірності місцезнаходження радіомітки в зоні локалізації за умови того, що коефіцієнт відповіді даної радіомітки n-й антені дорівнює ![]() , при цьому функцію
, при цьому функцію ![]() визначають двовимірним кільцевим розподілом, утвореним обертанням щодо осі ординат фігури, що формується одновимірним гаусовим або подібним розподілом з математичним сподіванням, яке визначається коефіцієнтом відповіді
визначають двовимірним кільцевим розподілом, утвореним обертанням щодо осі ординат фігури, що формується одновимірним гаусовим або подібним розподілом з математичним сподіванням, яке визначається коефіцієнтом відповіді ![]() даної радіомітки n-й антені, та наступним зсувом отриманої після обертання фігури до точки з координатами
даної радіомітки n-й антені, та наступним зсувом отриманої після обертання фігури до точки з координатами ![]() , які є координатами точки розміщення n-ї антени, після чого для кожної радіомітки, що відповіла зчитувачу, знаходять відповідну точку зони локалізації, в якій досягається максимум інтегральної умовної густини ймовірності
, які є координатами точки розміщення n-ї антени, після чого для кожної радіомітки, що відповіла зчитувачу, знаходять відповідну точку зони локалізації, в якій досягається максимум інтегральної умовної густини ймовірності ![]() місцезнаходження радіомітки в зоні локалізації за умови того, що за допомогою антен від даної радіомітки отримані сигнали відповідей з усередненими рівнями
місцезнаходження радіомітки в зоні локалізації за умови того, що за допомогою антен від даної радіомітки отримані сигнали відповідей з усередненими рівнями ![]() , сигнали відповідей від даної радіомітки прийняті антенами з номерами
, сигнали відповідей від даної радіомітки прийняті антенами з номерами ![]() , коефіцієнти відповідей даної радіомітки антенам дорівнюють
, коефіцієнти відповідей даної радіомітки антенам дорівнюють ![]() , для розрахунку якої перемножуються або нормуються і підсумовуються зі зважуванням функції умовної густини ймовірності
, для розрахунку якої перемножуються або нормуються і підсумовуються зі зважуванням функції умовної густини ймовірності ![]() місцезнаходження радіомітки в зоні локалізації за умови того, що за допомогою антен від даної радіомітки отримані сигнали відповідей з усередненими рівнями
місцезнаходження радіомітки в зоні локалізації за умови того, що за допомогою антен від даної радіомітки отримані сигнали відповідей з усередненими рівнями ![]() , умовної густини ймовірності
, умовної густини ймовірності ![]() місцезнаходження радіомітки в зоні локалізації за умови того, що сигнали відповідей від даної радіомітки прийняті антенами з номерами
місцезнаходження радіомітки в зоні локалізації за умови того, що сигнали відповідей від даної радіомітки прийняті антенами з номерами ![]() , та умовної густини ймовірності
, та умовної густини ймовірності ![]() місцезнаходження радіомітки в зоні локалізації за умови того, що коефіцієнти відповідей даної радіомітки антенам дорівнюють
місцезнаходження радіомітки в зоні локалізації за умови того, що коефіцієнти відповідей даної радіомітки антенам дорівнюють ![]() , і далі знайдену точку вважають оцінкою місцеположення відповідної радіомітки та об'єкта локалізації, на якому вона знаходиться.
, і далі знайдену точку вважають оцінкою місцеположення відповідної радіомітки та об'єкта локалізації, на якому вона знаходиться.
Текст
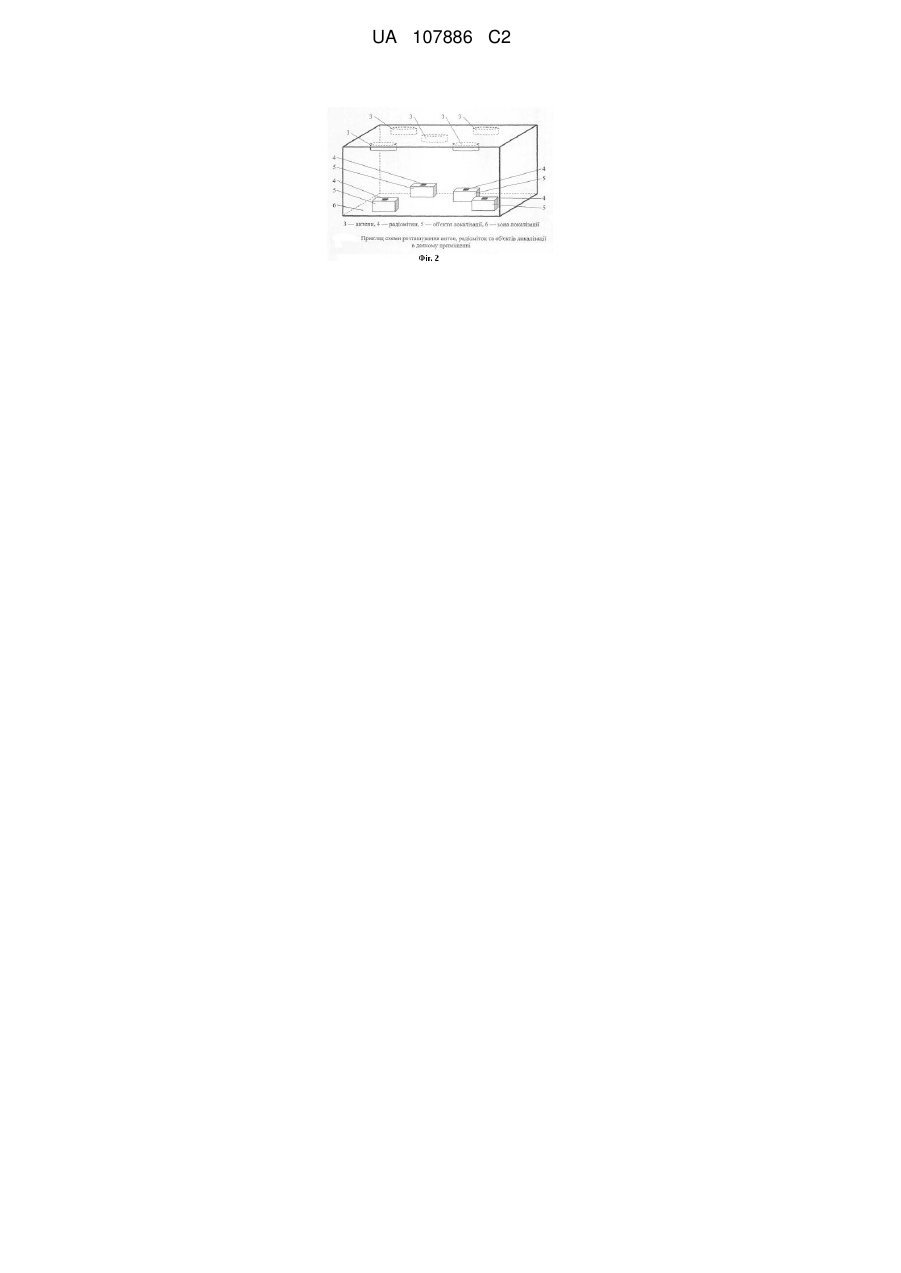
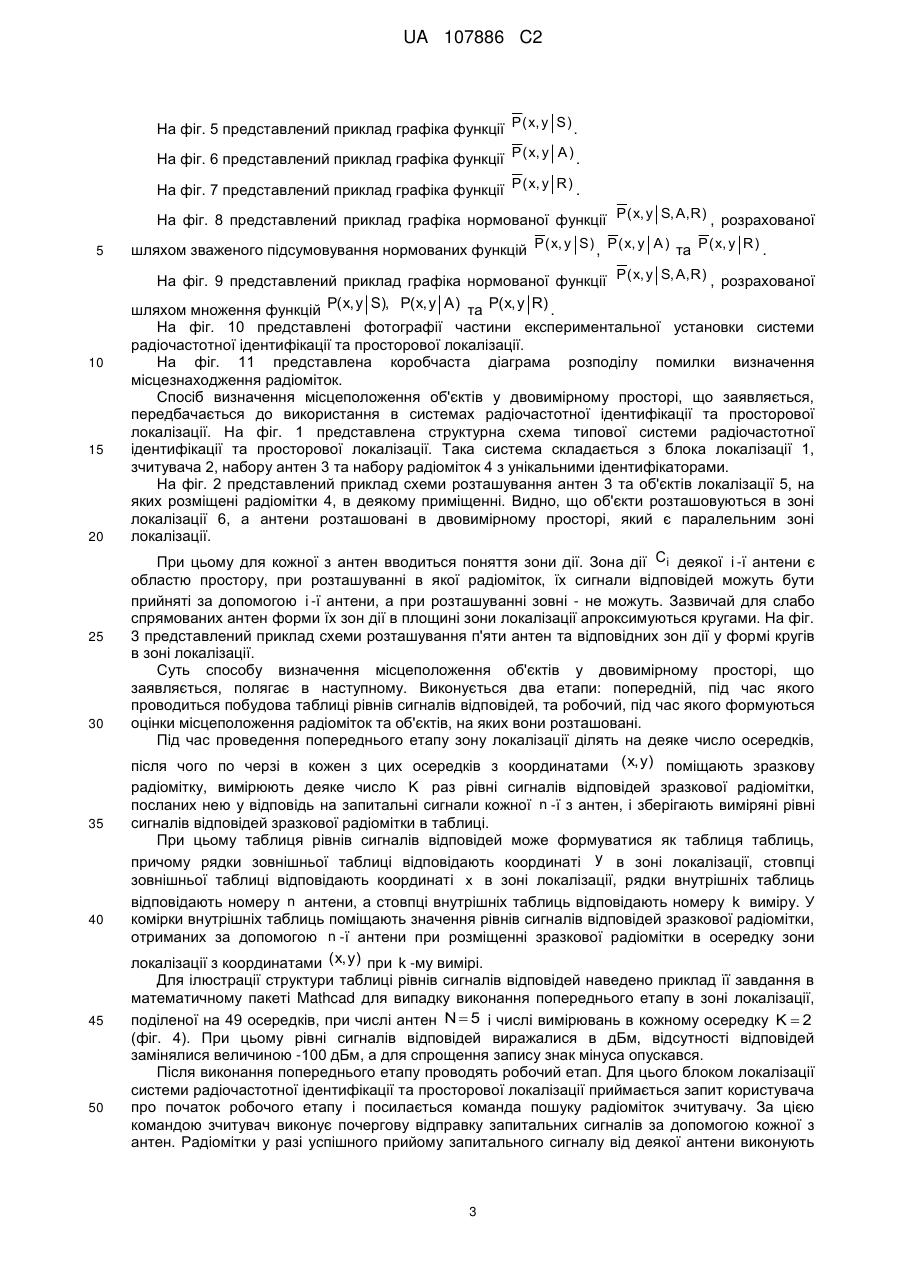
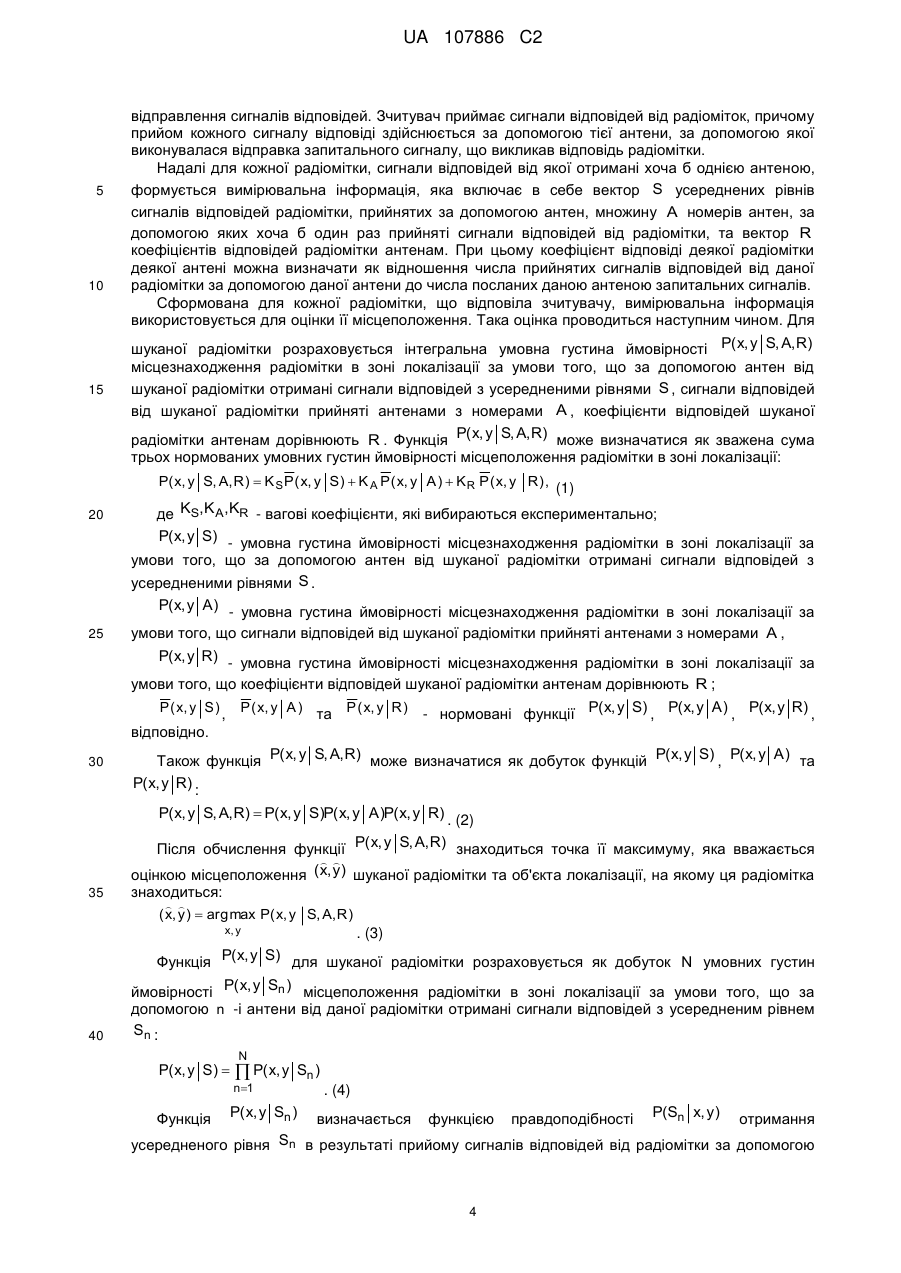
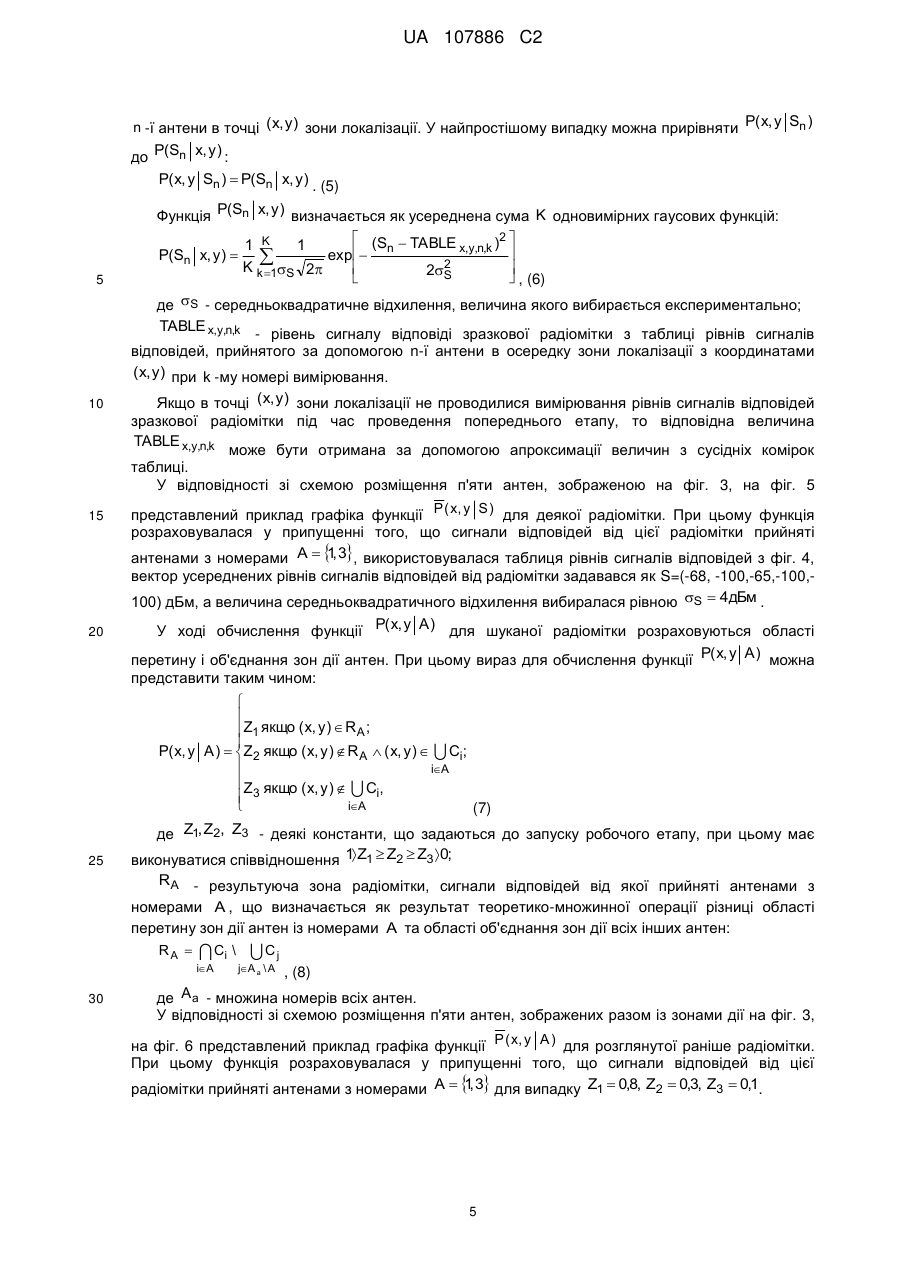
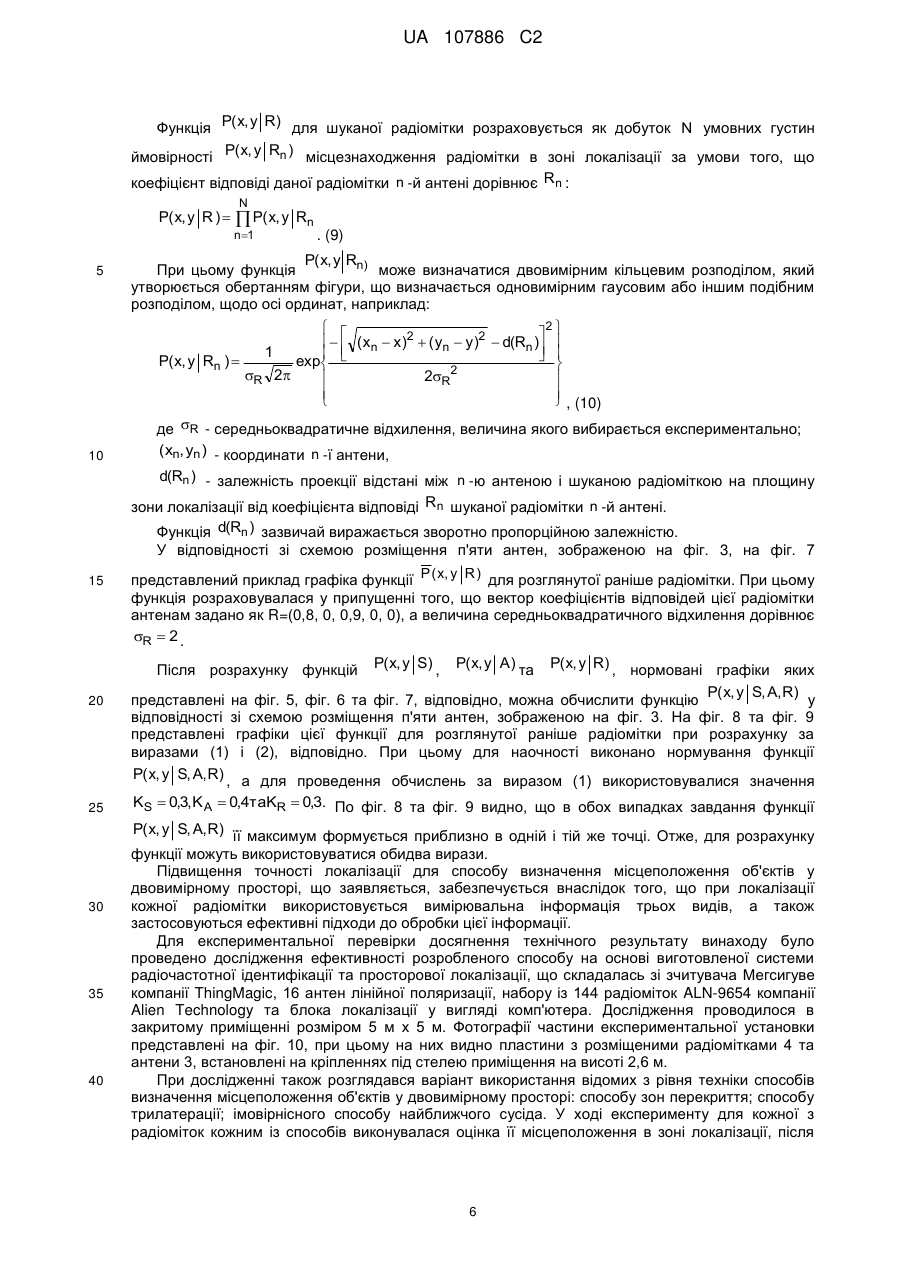
Реферат: Спосіб визначення місцеположення об'єктів в двовимірному просторі належить до радіотехніки, а саме до радіонавігації і радіолокації, та може бути використаним у системах радіочастотної ідентифікації та просторової локалізації. У способі виконується обробка вимірювальної інформації трьох видів, що включає в себе номери антен, за допомогою яких прийняті сигнали відповідей радіоміток, значення рівнів сигналів відповідей радіоміток та коефіцієнти відповідей радіоміток антенам. Під час обробки вимірювальної інформації для кожної радіомітки розраховується інтегральна умовна густина ймовірності її місцезнаходження в зоні локалізації. Після обчислення інтегральної густини ймовірності знаходиться точка її максимуму, яка вважається оцінкою місцеположення шуканої радіомітки та об'єкта локалізації, на якому ця радіомітка знаходиться. Технічним результатом є підвищення точності визначення місцеположення об'єктів. UA 107886 C2 (12) UA 107886 C2 UA 107886 C2 5 10 15 20 25 30 35 40 45 50 Винахід належить до області радіонавігації та радіолокації, а саме до способів визначення місцеположення об'єктів у двовимірному просторі за допомогою встановлених на них радіоміток, і передбачається до використання в системах радіочастотної ідентифікації та просторової локалізації. Винахід може застосовуватися для визначення місцеположення рухомих і нерухомих об'єктів як на відкритих просторах, так і в закритих приміщеннях. З існуючого рівня техніки відомий спосіб зон перекриття, заснований на знаходженні перетину зон дії антен, які отримали сигнали відповідей від радіоміток [1]. При використанні цього способу точність визначення місцеположення об'єктів в першу чергу залежить від розташування антен у просторі. Основним недоліком способу зон перекриття є принципова неможливість отримати середню помилку місцевизначення менше розмірів тих областей, на які розбивається зона локалізації зонами дії антен. Цей недолік значною мірою усувається при використанні способу трилатерації, заснованого на побудові кіл положення за вимірюваннями, проведеними за допомогою декількох антен, і знаходженні перетину цих кіл [2]. При реалізації цього способу в системах радіочастотної ідентифікації та просторової локалізації як вимірювальна інформація використовуються значення рівнів сигналів відповідей від радіоміток. Однак при локалізації радіоміток в закритих приміщеннях у поширенні сигналів виникають ефекти багатопроменевості, що вносить сильні спотворення в результати вимірювань. Недоліком способу трилатерації є його нездатність враховувати такі ефекти, що істотно знижує точність місцевизначення об'єктів в закритих приміщеннях. Цей недолік можна подолати при використанні імовірнісного способу найближчого сусіда [3], який є найбільш близьким по технічній суті до способу визначення місцеположення об'єктів у двовимірному просторі, що заявляється. Імовірнісний спосіб найближчого сусіда заснований на попередній побудові таблиці рівнів сигналів відповідей, яка при локалізації радіоміток використовується як джерело еталонних даних для порівняння з вхідною вимірювальною інформацією. За таку інформацію використовуються значення рівнів сигналів відповідей від радіоміток. Завдяки своїй здатності враховувати реальні особливості розподілу значень рівнів сигналів відповідей в зоні локалізації, такий спосіб дозволяє підвищити точність місцевизначення об'єктів у закритих приміщеннях порівняно зі способом трилатерації. Однак імовірнісний спосіб найближчого сусіда не дає істотного виграшу в точності, оскільки при обчисленні оцінок місцезнаходження використовуються тільки значення рівнів сигналів відповідей, а вимірювальна інформація інших видів не використовується, що є основним недоліком такого способу. Таким чином, задачею винаходу, що заявляється, є створення високоточного способу визначення місцеположення об'єктів у двовимірному просторі. Поставлена задача вирішується наступним чином. У способі визначення місцеположення об'єктів у двовимірному просторі на основі системи радіочастотної ідентифікації та просторової локалізації, яка складається з зчитувача, набору з N антен, блока локалізації та набору радіоміток з унікальними ідентифікаторами, що розміщуються на об'єктах локалізації, розташованих в зоні локалізації, який полягає в тому, що послідовно виконують попередній та робочий етапи, причому під час попереднього етапу зону локалізації ділять на деяке число осередків, після чого по черзі в кожен з цих осередків поміщають зразкову радіомітку, вимірюють деяке число раз K рівні сигналів відповідей зразкової радіомітки, посланих нею у відповідь на запитальні сигнали кожної з N антен, і зберігають отримані значення рівнів сигналів відповідей у таблиці рівнів сигналів відповідей, під час робочого етапу деяке число раз виконують процеси комунікації зчитувача за допомогою кожної з антен із радіомітками, в результаті чого для кожної радіомітки, що відповіла зчитувачу, формується вектор S усереднених рівнів сигналів відповідей радіомітки, прийнятих за допомогою антен, після чого для кожної радіомітки, що відповіла зчитувачу, розраховують умовну густину ймовірності P( x, y S) місцезнаходження радіомітки в зоні локалізації за умови того, що за допомогою антен від даної радіомітки отримані сигнали відповідей з усередненими рівнями S , як добуток N функцій P( x, y Sn ) , що є умовними густинами ймовірності місцезнаходження радіомітки в зоні локалізації за умови того, що за допомогою n -ї антени від даної радіомітки отримані сигнали відповідей з усередненим рівнем Sn , причому функція P( x, y Sn ) визначається функцією 55 правдоподібності P(Sn x, y ) отримання усередненого рівня Sn в результаті прийому за допомогою n -і антени сигналів відповідей від радіомітки в точці ( x, y) зони локалізації, яка 1 UA 107886 C2 5 10 15 розраховується як усереднена сума K одновимірних гаусових функцій змінної Sn у кожної k -ї з яких математичне сподівання визначається рівнем сигналу відповіді зразкової радіомітки, узятим з таблиці рівнів сигналів відповідей, прийнятим за допомогою n -ї антени в осередку зони локалізації з координатами ( x, y) при k -му номері вимірювання в ході виконання попереднього етапу, згідно з винаходом, під час робочого етапу для кожної радіомітки, що відповіла зчитувачу, додатково формується множина A номерів антен, за допомогою яких хоча б один раз були прийняті сигнали відповідей від радіомітки, та вектор R коефіцієнтів відповідей радіомітки антенам, після чого для кожної радіомітки, що відповіла зчитувачу, розраховують умовну густину ймовірності P( x, y A ) місцезнаходження радіомітки в зоні локалізації за умови того, що сигнали відповідей від даної радіомітки прийняті антенами з номерами A , яка задається у вигляді Z1 для точок, що належать результуючій зоні радіомітки, Z 2 для точок, що належать об'єднанню зон дії антен із номерами A і не належать результуючій зоні радіомітки, Z 3 для точок, що не належать об'єднанню зон дії антен із номерами A , причому величини Z1, Z2 та Z3 вибирають зі співвідношення 1 Z1 Z2 Z3 0 , а результуючу зону радіомітки визначають як результат теоретико-множинної операції різниці області перетину зон дії антен із номерами A і області об'єднання зон дії всіх інших антен, крім того для кожної радіомітки, що відповіла зчитувачу, розраховують умовну густину ймовірності P( x, y R) місцезнаходження радіомітки в зоні локалізації за умови того, що коефіцієнти відповідей даної радіомітки антенам дорівнюють R , як добуток N функцій P( x, y Rn ) , що є умовними густинами ймовірності 20 25 30 35 40 45 місцезнаходження радіомітки в зоні локалізації за умови того, що коефіцієнт відповіді даної радіомітки n -й антені дорівнює Rn , при цьому функцію P( x, y Rn ) визначають двовимірним кільцевим розподілом, утвореним обертанням щодо осі ординат фігури, що формується одновимірним гаусовим або іншим подібним розподілом з математичним сподіванням, яке визначається коефіцієнтом відповіді Rn даної радіомітки n -й антені, та наступним зсувом отриманої після обертання фігури до точки з координатами ( xn, yn ) , які є координатами точки розміщення n -ї антени, після чого для кожної радіомітки, що відповіла зчитувачу, знаходять деяку точку зони локалізації, в якій досягається максимум інтегральної умовної густини ймовірності P( x, y S, A, R) місцезнаходження радіомітки в зоні локалізації за умови того, що за допомогою антен від даної радіомітки отримані сигнали відповідей з усередненими рівнями S , сигнали відповідей від даної радіомітки прийняті антенами з номерами A , коефіцієнти відповідей даної радіомітки антенам дорівнюють R , для розрахунку якої перемножуються або нормуються і підсумовуються зі зважуванням функції умовної густини ймовірності P( x, y S) місцезнаходження радіомітки в зоні локалізації за умови того, що за допомогою антен від даної радіомітки отримані сигнали відповідей з усередненими рівнями S , умовної густини ймовірності P( x, y A ) місцезнаходження радіомітки в зоні локалізації за умови того, що сигнали відповідей від даної радіомітки прийняті антенами з номерами A , та умовної густини ймовірності P( x, y R) місцезнаходження радіомітки в зоні локалізації за умови того, що коефіцієнти відповідей даної радіомітки антенам дорівнюють R , і далі знайдену точку вважають оцінкою місцеположення відповідної радіомітки та об'єкта локалізації, на якому вона знаходиться. Технічним результатом винаходу є підвищення точності визначення місцеположення об'єктів у двовимірному просторі. Суть винаходу пояснена кресленнями: На фіг. 1 представлена структурна схема типової системи радіочастотної ідентифікації та просторової локалізації. На фіг. 2 представлений приклад схеми розташування антен, радіоміток та об'єктів локалізації в деякому приміщенні. На фіг. 3 представлений приклад схеми розташування п'яти антен та відповідних зон дії у формі кругів в зоні локалізації. На фіг. 4 представлений приклад таблиці рівнів сигналів відповідей. 2 UA 107886 C2 На фіг. 5 представлений приклад графіка функції P ( x, y S ) . На фіг. 6 представлений приклад графіка функції P ( x, y A ) . На фіг. 7 представлений приклад графіка функції P ( x, y R ) . На фіг. 8 представлений приклад графіка нормованої функції P( x, y S, A, R) , розрахованої 5 10 15 20 25 30 35 40 45 50 шляхом зваженого підсумовування нормованих функцій P ( x, y S ) , P ( x, y A ) та P ( x, y R ) . На фіг. 9 представлений приклад графіка нормованої функції P( x, y S, A, R) , розрахованої шляхом множення функцій P( x, y S), P( x, y A ) та P( x, y R) . На фіг. 10 представлені фотографії частини експериментальної установки системи радіочастотної ідентифікації та просторової локалізації. На фіг. 11 представлена коробчаста діаграма розподілу помилки визначення місцезнаходження радіоміток. Спосіб визначення місцеположення об'єктів у двовимірному просторі, що заявляється, передбачається до використання в системах радіочастотної ідентифікації та просторової локалізації. На фіг. 1 представлена структурна схема типової системи радіочастотної ідентифікації та просторової локалізації. Така система складається з блока локалізації 1, зчитувача 2, набору антен 3 та набору радіоміток 4 з унікальними ідентифікаторами. На фіг. 2 представлений приклад схеми розташування антен 3 та об'єктів локалізації 5, на яких розміщені радіомітки 4, в деякому приміщенні. Видно, що об'єкти розташовуються в зоні локалізації 6, а антени розташовані в двовимірному просторі, який є паралельним зоні локалізації. При цьому для кожної з антен вводиться поняття зони дії. Зона дії Ci деякої i -ї антени є областю простору, при розташуванні в якої радіоміток, їх сигнали відповідей можуть бути прийняті за допомогою i -ї антени, а при розташуванні зовні - не можуть. Зазвичай для слабо спрямованих антен форми їх зон дії в площині зони локалізації апроксимуються кругами. На фіг. 3 представлений приклад схеми розташування п'яти антен та відповідних зон дії у формі кругів в зоні локалізації. Суть способу визначення місцеположення об'єктів у двовимірному просторі, що заявляється, полягає в наступному. Виконується два етапи: попередній, під час якого проводиться побудова таблиці рівнів сигналів відповідей, та робочий, під час якого формуються оцінки місцеположення радіоміток та об'єктів, на яких вони розташовані. Під час проведення попереднього етапу зону локалізації ділять на деяке число осередків, після чого по черзі в кожен з цих осередків з координатами ( x, y) поміщають зразкову радіомітку, вимірюють деяке число K раз рівні сигналів відповідей зразкової радіомітки, посланих нею у відповідь на запитальні сигнали кожної n -ї з антен, і зберігають виміряні рівні сигналів відповідей зразкової радіомітки в таблиці. При цьому таблиця рівнів сигналів відповідей може формуватися як таблиця таблиць, причому рядки зовнішньої таблиці відповідають координаті y в зоні локалізації, стовпці зовнішньої таблиці відповідають координаті x в зоні локалізації, рядки внутрішніх таблиць відповідають номеру n антени, а стовпці внутрішніх таблиць відповідають номеру k виміру. У комірки внутрішніх таблиць поміщають значення рівнів сигналів відповідей зразкової радіомітки, отриманих за допомогою n -ї антени при розміщенні зразкової радіомітки в осередку зони локалізації з координатами ( x, y) при k -му вимірі. Для ілюстрації структури таблиці рівнів сигналів відповідей наведено приклад її завдання в математичному пакеті Mathcad для випадку виконання попереднього етапу в зоні локалізації, поділеної на 49 осередків, при числі антен N 5 і числі вимірювань в кожному осередку K 2 (фіг. 4). При цьому рівні сигналів відповідей виражалися в дБм, відсутності відповідей замінялися величиною -100 дБм, а для спрощення запису знак мінуса опускався. Після виконання попереднього етапу проводять робочий етап. Для цього блоком локалізації системи радіочастотної ідентифікації та просторової локалізації приймається запит користувача про початок робочого етапу і посилається команда пошуку радіоміток зчитувачу. За цією командою зчитувач виконує почергову відправку запитальних сигналів за допомогою кожної з антен. Радіомітки у разі успішного прийому запитального сигналу від деякої антени виконують 3 UA 107886 C2 5 10 15 відправлення сигналів відповідей. Зчитувач приймає сигнали відповідей від радіоміток, причому прийом кожного сигналу відповіді здійснюється за допомогою тієї антени, за допомогою якої виконувалася відправка запитального сигналу, що викликав відповідь радіомітки. Надалі для кожної радіомітки, сигнали відповідей від якої отримані хоча б однією антеною, формується вимірювальна інформація, яка включає в себе вектор S усереднених рівнів сигналів відповідей радіомітки, прийнятих за допомогою антен, множину A номерів антен, за допомогою яких хоча б один раз прийняті сигнали відповідей від радіомітки, та вектор R коефіцієнтів відповідей радіомітки антенам. При цьому коефіцієнт відповіді деякої радіомітки деякої антені можна визначати як відношення числа прийнятих сигналів відповідей від даної радіомітки за допомогою даної антени до числа посланих даною антеною запитальних сигналів. Сформована для кожної радіомітки, що відповіла зчитувачу, вимірювальна інформація використовується для оцінки її місцеположення. Така оцінка проводиться наступним чином. Для шуканої радіомітки розраховується інтегральна умовна густина ймовірності P( x, y S, A, R) місцезнаходження радіомітки в зоні локалізації за умови того, що за допомогою антен від шуканої радіомітки отримані сигнали відповідей з усередненими рівнями S , сигнали відповідей від шуканої радіомітки прийняті антенами з номерами A , коефіцієнти відповідей шуканої радіомітки антенам дорівнюють R . Функція P( x, y S, A, R) може визначатися як зважена сума трьох нормованих умовних густин ймовірності місцеположення радіомітки в зоні локалізації: 20 25 P( x, y S, A, R) K SP( x, y S) K A P( x, y A ) KR P( x, y R) , (1) де KS,K A ,KR - вагові коефіцієнти, які вибираються експериментально; P( x, y S) - умовна густина ймовірності місцезнаходження радіомітки в зоні локалізації за умови того, що за допомогою антен від шуканої радіомітки отримані сигнали відповідей з усередненими рівнями S . P( x, y A ) - умовна густина ймовірності місцезнаходження радіомітки в зоні локалізації за умови того, що сигнали відповідей від шуканої радіомітки прийняті антенами з номерами A , P( x, y R) - умовна густина ймовірності місцезнаходження радіомітки в зоні локалізації за умови того, що коефіцієнти відповідей шуканої радіомітки антенам дорівнюють R ; P ( x, y S ) , P ( x, y A ) та P ( x, y R ) - нормовані функції P( x, y S) , P( x, y A ) , P( x, y R) , відповідно. 30 35 40 Також функція P( x, y S, A, R) може визначатися як добуток функцій P( x, y S) , P( x, y A ) та P( x, y R) : P( x, y S, A, R) P( x, y S)P( x, y A )P( x, y R) . (2) Після обчислення функції P( x, y S, A, R) знаходиться точка її максимуму, яка вважається оцінкою місцеположення ( x, y) шуканої радіомітки та об'єкта локалізації, на якому ця радіомітка знаходиться: ( x, y ) arg max P( x, y S, A, R) x, y . (3) P( x, y S) для шуканої радіомітки розраховується як добуток N умовних густин Функція ймовірності P( x, y Sn ) місцеположення радіомітки в зоні локалізації за умови того, що за допомогою n -і антени від даної радіомітки отримані сигнали відповідей з усередненим рівнем Sn : P( x, y S) N P( x, y n1 Функція Sn ) P( x, y Sn ) . (4) визначається функцією правдоподібності P(Sn x, y ) отримання усередненого рівня Sn в результаті прийому сигналів відповідей від радіомітки за допомогою 4 UA 107886 C2 n -ї антени в точці ( x, y) зони локалізації. У найпростішому випадку можна прирівняти P( x, y Sn ) до P(Sn x, y ) : P( x, y Sn ) P(Sn x, y ) . (5) Функція P(Sn x, y ) визначається як усереднена сума K одновимірних гаусових функцій: P(Sn 5 2 (S TABLE 1 K 1 x,y,n,k ) n x, y ) exp 2 K k 1S 2 2S , (6) де S - середньоквадратичне відхилення, величина якого вибирається експериментально; TABLE x,y,n,k - рівень сигналу відповіді зразкової радіомітки з таблиці рівнів сигналів відповідей, прийнятого за допомогою n-ї антени в осередку зони локалізації з координатами ( x, y) при k -му номері вимірювання. 10 15 20 Якщо в точці ( x, y) зони локалізації не проводилися вимірювання рівнів сигналів відповідей зразкової радіомітки під час проведення попереднього етапу, то відповідна величина TABLE x,y,n,k може бути отримана за допомогою апроксимації величин з сусідніх комірок таблиці. У відповідності зі схемою розміщення п'яти антен, зображеною на фіг. 3, на фіг. 5 представлений приклад графіка функції P ( x, y S ) для деякої радіомітки. При цьому функція розраховувалася у припущенні того, що сигнали відповідей від цієї радіомітки прийняті 1 антенами з номерами A , 3, використовувалася таблиця рівнів сигналів відповідей з фіг. 4, вектор усереднених рівнів сигналів відповідей від радіомітки задавався як S=(-68, -100,-65,-100,100) дБм, а величина середньоквадратичного відхилення вибиралася рівною S 4дБм . У ході обчислення функції P( x, y A ) для шуканої радіомітки розраховуються області перетину і об'єднання зон дії антен. При цьому вираз для обчислення функції P( x, y A ) можна представити таким чином: 25 30 Z1 якщо ( x, y ) R A ; P( x, y A ) Z2 якщо ( x, y ) R A ( x, y ) Ci; iA Z якщо ( x, y ) C , i 3 iA (7) Z1, Z2, Z3 - деякі константи, що задаються до запуску робочого етапу, при цьому має де виконуватися співвідношення 1 Z1 Z2 Z3 0; RA - результуюча зона радіомітки, сигнали відповідей від якої прийняті антенами з номерами A , що визначається як результат теоретико-множинної операції різниці області перетину зон дії антен із номерами A та області об'єднання зон дії всіх інших антен: R A Ci \ C j iA jA a \ A , (8) де A a - множина номерів всіх антен. У відповідності зі схемою розміщення п'яти антен, зображених разом із зонами дії на фіг. 3, на фіг. 6 представлений приклад графіка функції P ( x, y A ) для розглянутої раніше радіомітки. При цьому функція розраховувалася у припущенні того, що сигнали відповідей від цієї 1 радіомітки прийняті антенами з номерами A , 3 для випадку Z1 0,8, Z2 0,3, Z3 0,1. 5 UA 107886 C2 Функція P( x, y R) для шуканої радіомітки розраховується як добуток N умовних густин ймовірності P( x, y Rn ) місцезнаходження радіомітки в зоні локалізації за умови того, що коефіцієнт відповіді даної радіомітки n -й антені дорівнює Rn : P( x, y R ) N P( x, y n1 5 Rn . (9) P( x, y Rn) При цьому функція може визначатися двовимірним кільцевим розподілом, який утворюється обертанням фігури, що визначається одновимірним гаусовим або іншим подібним розподілом, щодо осі ординат, наприклад: 2 ( xn x )2 ( yn y )2 d(Rn ) 1 P( x, y Rn ) exp 2 R 2 2R , (10) 10 де R - середньоквадратичне відхилення, величина якого вибирається експериментально; ( xn, yn ) - координати n -ї антени, d(Rn ) - залежність проекції відстані між n -ю антеною і шуканою радіоміткою на площину зони локалізації від коефіцієнта відповіді Rn шуканої радіомітки n -й антені. Функція d(Rn ) зазвичай виражається зворотно пропорційною залежністю. У відповідності зі схемою розміщення п'яти антен, зображеною на фіг. 3, на фіг. 7 15 представлений приклад графіка функції P ( x, y R ) для розглянутої раніше радіомітки. При цьому функція розраховувалася у припущенні того, що вектор коефіцієнтів відповідей цієї радіомітки антенам задано як R=(0,8, 0, 0,9, 0, 0), а величина середньоквадратичного відхилення дорівнює R 2 . P( x, y R) , нормовані графіки яких представлені на фіг. 5, фіг. 6 та фіг. 7, відповідно, можна обчислити функцію P( x, y S, A, R) у відповідності зі схемою розміщення п'яти антен, зображеною на фіг. 3. На фіг. 8 та фіг. 9 представлені графіки цієї функції для розглянутої раніше радіомітки при розрахунку за виразами (1) і (2), відповідно. При цьому для наочності виконано нормування функції P( x, y S, A, R) , а для проведення обчислень за виразом (1) використовувалися значення Після розрахунку функцій 20 25 30 35 40 P( x, y S) , P( x, y A ) та KS 0,3, K A 0,4таKR 0,3. По фіг. 8 та фіг. 9 видно, що в обох випадках завдання функції P( x, y S, A, R) її максимум формується приблизно в одній і тій же точці. Отже, для розрахунку функції можуть використовуватися обидва вирази. Підвищення точності локалізації для способу визначення місцеположення об'єктів у двовимірному просторі, що заявляється, забезпечується внаслідок того, що при локалізації кожної радіомітки використовується вимірювальна інформація трьох видів, а також застосовуються ефективні підходи до обробки цієї інформації. Для експериментальної перевірки досягнення технічного результату винаходу було проведено дослідження ефективності розробленого способу на основі виготовленої системи радіочастотної ідентифікації та просторової локалізації, що складалась зі зчитувача Мегсигуве компанії ThingMagic, 16 антен лінійної поляризації, набору із 144 радіоміток ALN-9654 компанії Alien Technology та блока локалізації у вигляді комп'ютера. Дослідження проводилося в закритому приміщенні розміром 5 м х 5 м. Фотографії частини експериментальної установки представлені на фіг. 10, при цьому на них видно пластини з розміщеними радіомітками 4 та антени 3, встановлені на кріпленнях під стелею приміщення на висоті 2,6 м. При дослідженні також розглядався варіант використання відомих з рівня техніки способів визначення місцеположення об'єктів у двовимірному просторі: способу зон перекриття; способу трилатерації; імовірнісного способу найближчого сусіда. У ході експерименту для кожної з радіоміток кожним із способів виконувалася оцінка її місцеположення в зоні локалізації, після 6 UA 107886 C2 5 10 чого розраховувалася помилка місцевизначення як відстань між реальним становищем радіомітки та отриманою оцінкою. Після цього була побудована коробчаста діаграма (опис діаграм такого типу представлено в [4]), на якій для кожного із способів визначення місцеположення об'єктів у двовимірному просторі представлені основні параметри розподілу помилки місцевизначення радіоміток (фіг. 11). Як параметри представлено 10-і та 90-і процентилі (короткі вертикальні лінії зовні прямокутників), перші і треті квартилі (межі прямокутників), медіани (жирні лінії усередині прямокутників), середні значення (жирні штрихові лінії усередині прямокутників), а також викиди, які не потрапляють в інтервали між 10-ми та 90-ми процентилями (малі кола). При цьому досліджувані способи зазначені на діаграмі наступним чином: спосіб зон перекриття як спосіб 1; спосіб трилатерації як спосіб 2; імовірнісний спосіб найближчого сусіда як спосіб 3; спосіб, що заявляється, при розрахунку функції P( x, y S, A, R) шляхом зваженого 15 підсумовування нормованих функцій P ( x, y S ) , P ( x, y A ) та P ( x, y R ) як спосіб 4; спосіб, що заявляється, при розрахунку функції P( x, y S, A, R) шляхом множення функцій P( x, y S) , P( x, y A ) та P( x, y R) як спосіб 5. 20 Середнє значення помилки місцевизначення радіоміток отримано наступним: - 40,5 см для способу зон перекриття, - 43,9 см для способу трилатерації; - 41,9 см для імовірнісного способу найближчого сусіда; - 36,6 см для способу, що заявляється, при розрахунку функції P( x, y S, A, R) , шляхом зваженого підсумовування нормованих функцій P ( x, y S ) , P ( x, y A ) та P ( x, y R ) ; - 37,4 см для способу, що заявляється, , при розрахунку функції P( x, y S, A, R) шляхом множення функцій P( x, y S) , P( x, y A ) та P( x, y R) . 25 30 35 Тобто найменша помилка місцевизначення радіоміток отримана для випадків використання способу, що заявляється. Виходячи з представлених результатів, можна зробити висновок, що розроблений спосіб визначення місцеположення об'єктів у двовимірному просторі дозволяє підвищити точність визначення місцеположення об'єктів, і, таким чином, технічний результат винаходу досягнутий. Джерела інформації:. 1. Валеев М.А. Городская система позиционирования, мониторинга и диспетчеризации подвижных объектов на основе метода перекрывающихся зон: автореферат дис. … канд. техн. наук: 05.12.04 / Валеев М.А. - Казань, 2002. - 16 с. 2. Localization technologies for indoor human tracking / D. Zhang et al. // Future Information Technology (FutureTech), 2010 5th International Conference. - Busan, 2010. - P. 1-6. 3. Roos T. A probabilistic approach to WLAN user location estimation / T. Roos, P. Myllymaki, H. Tirri, P. Misikangas // International Journal of Wireless Information Networks.-2002. - Vol.9. - No 3. P. 155-164. 4. Ящик с усами [Електронний ресурс] / Википедия. http://ru.wikipedia.org/wiki/Ящик_c_ycaми.-07.10.2013. 40 ФОРМУЛА ВИНАХОДУ 45 50 Спосіб визначення місцеположення об'єктів у двовимірному просторі на основі системи радіочастотної ідентифікації та просторової локалізації, яка складається зі зчитувача, набору з N антен, блока локалізації та набору радіоміток з унікальними ідентифікаторами, що розміщуються на об'єктах локалізації, розташованих в зоні локалізації, який полягає в тому, що послідовно виконують попередній та робочий етапи, причому під час попереднього етапу зону локалізації ділять на відповідне число осередків, після чого по черзі в кожен з цих осередків поміщають зразкову радіомітку, вимірюють K раз рівні сигналів відповідей зразкової радіомітки, посланих нею у відповідь на запитальні сигнали кожної з N антен, і зберігають отримані значення рівнів сигналів відповідей у таблиці рівнів сигналів відповідей, під час робочого етапу відповідне число раз виконують процеси комунікації зчитувача за допомогою кожної з антен із радіомітками, в результаті чого для кожної радіомітки, що відповіла зчитувачу, формується вектор S усереднених рівнів сигналів відповідей радіомітки, прийнятих за 7 UA 107886 C2 допомогою антен, після чого для кожної радіомітки, що відповіла зчитувачу, розраховують умовну густину ймовірності P( x, y S) місцезнаходження радіомітки в зоні локалізації за умови того, що за допомогою антен від даної радіомітки отримані сигнали відповідей з усередненими рівнями 5 S , як добуток N функцій P( x, y Sn ) , що є умовними густинами ймовірності місцезнаходження радіомітки в зоні локалізації за умови того, що за допомогою n-ї антени від даної радіомітки отримані сигнали відповідей з усередненим рівнем S n , причому функція P( x, y Sn ) визначається функцією правдоподібності P(Sn x, y) отримання усередненого рівня 10 15 Sn в результаті прийому за допомогою n-ї антени сигналів відповідей від радіомітки в точці ( x, y) зони локалізації, яка розраховується як усереднена сума K одновимірних гаусових функцій змінної S n , у кожної k-ї з яких математичне сподівання визначається рівнем сигналу відповіді зразкової радіомітки, узятим з таблиці рівнів сигналів відповідей, прийнятим за допомогою n-ї антени в осередку зони локалізації з координатами ( x, y) при k-му номері вимірювання в ході виконання попереднього етапу, який відрізняється тим, що під час робочого етапу для кожної радіомітки, що відповіла зчитувачу, додатково формується множина A номерів антен, за допомогою яких щонайменше один раз були прийняті сигнали відповідей від радіомітки, та вектор R коефіцієнтів відповідей радіомітки антенам, після чого для кожної радіомітки, що відповіла зчитувачу, розраховують умовну густину ймовірності P( x, y A) місцезнаходження радіомітки в зоні локалізації за умови того, що сигнали відповідей від даної радіомітки прийняті антенами з номерами A , яка задається у вигляді Z1 для точок, що 20 належать результуючій зоні радіомітки, Z 2 для точок, що належать об'єднанню зон дії антен із номерами A та не належать результуючій зоні радіомітки, Z 3 для точок, що не належать об'єднанню зон дії антен із номерами A , причому величини Z1, Z 2 та Z 3 вибирають зі співвідношення 1 Z1 Z 2 Z3 0 , а результуючу зону радіомітки визначають як результат 25 теоретико-множинної операції різниці області перетину зон дії антен із номерами A та області об'єднання зон дії всіх інших антен, крім того для кожної радіомітки, що відповіла зчитувачу, розраховують умовну густину ймовірності P(x, y R) місцезнаходження радіомітки в зоні локалізації за умови того, що коефіцієнти відповідей даної радіомітки антенам дорівнюють R , як добуток N функцій P( x, y R n ) , що є умовними густинами ймовірності місцезнаходження радіомітки в зоні локалізації за умови того, що коефіцієнт відповіді даної радіомітки n-й антені 30 дорівнює R n , при цьому функцію P( x, y R n ) визначають двовимірним кільцевим розподілом, 35 утвореним обертанням щодо осі ординат фігури, що формується одновимірним гаусовим або подібним розподілом з математичним сподіванням, яке визначається коефіцієнтом відповіді R n даної радіомітки n-й антені, та наступним зсувом отриманої після обертання фігури до точки з координатами ( x n , y n ) , які є координатами точки розміщення n-ї антени, після чого для кожної радіомітки, що відповіла зчитувачу, знаходять відповідну точку зони локалізації, в якій досягається 40 максимум інтегральної умовної густини ймовірності P( x, y S, A, R ) місцезнаходження радіомітки в зоні локалізації за умови того, що за допомогою антен від даної радіомітки отримані сигнали відповідей з усередненими рівнями S , сигнали відповідей від даної радіомітки прийняті антенами з номерами A , коефіцієнти відповідей даної радіомітки антенам дорівнюють R , для розрахунку якої перемножуються або нормуються і підсумовуються зі зважуванням функції умовної густини ймовірності P( x, y S) місцезнаходження радіомітки в зоні локалізації за умови того, що за допомогою антен від даної радіомітки отримані сигнали відповідей з усередненими рівнями S, умовної густини ймовірності P( x, y A) місцезнаходження радіомітки в зоні локалізації за умови того, що сигнали відповідей від даної 45 радіомітки прийняті антенами з номерами A , та умовної густини ймовірності P( x, y R) 8 UA 107886 C2 місцезнаходження радіомітки в зоні локалізації за умови того, що коефіцієнти відповідей даної радіомітки антенам дорівнюють R , і далі знайдену точку вважають оцінкою місцеположення відповідної радіомітки та об'єкта локалізації, на якому вона знаходиться. 9 UA 107886 C2 10 UA 107886 C2 11 UA 107886 C2 Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 12
ДивитисяДодаткова інформація
Автори англійськоюHimpelevych Yurii Borysovych
Автори російськоюГимпилевич Юрий Борисович
МПК / Мітки
МПК: G01S 5/04, G01S 13/75
Мітки: об'єктів, двовимірному, просторі, визначення, місцеположення, спосіб
Код посилання
<a href="https://ua.patents.su/14-107886-sposib-viznachennya-miscepolozhennya-obehktiv-u-dvovimirnomu-prostori.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення місцеположення об’єктів у двовимірному просторі</a>
Спосіб визначення місцеположення об’єктів у двовимірному просторі
Номер патенту: 87461
Опубліковано: 10.02.2014
Автори: Савочкін Дмитро Олександрович, Гімпілевич Юрій Борисович
МПК: G01S 13/75
Мітки: визначення, об'єктів, місцеположення, двовимірному, спосіб, просторі
Формула / Реферат:
Спосіб визначення місцеположення об'єктів у двовимірному просторі, який полягає в тому, що для системи радіочастотної локалізації в двовимірному просторі, що складається з блока локалізації, набору радіоміток, розташованих на об'єктах в зоні локалізації, і зчитувача, що включає в себе набір антен, в блоці локалізації для кожної радіомітки формується оцінка її місцеположення, при цьому кожна така оцінка формується як результат виконання...
Спосіб визначення місцеположення об’єктів
Номер патенту: 87459
Опубліковано: 10.02.2014
Автори: Савочкін Дмитро Олександрович, Гімпілевич Юрій Борисович
МПК: G01S 5/04
Мітки: об'єктів, місцеположення, визначення, спосіб
Формула / Реферат:
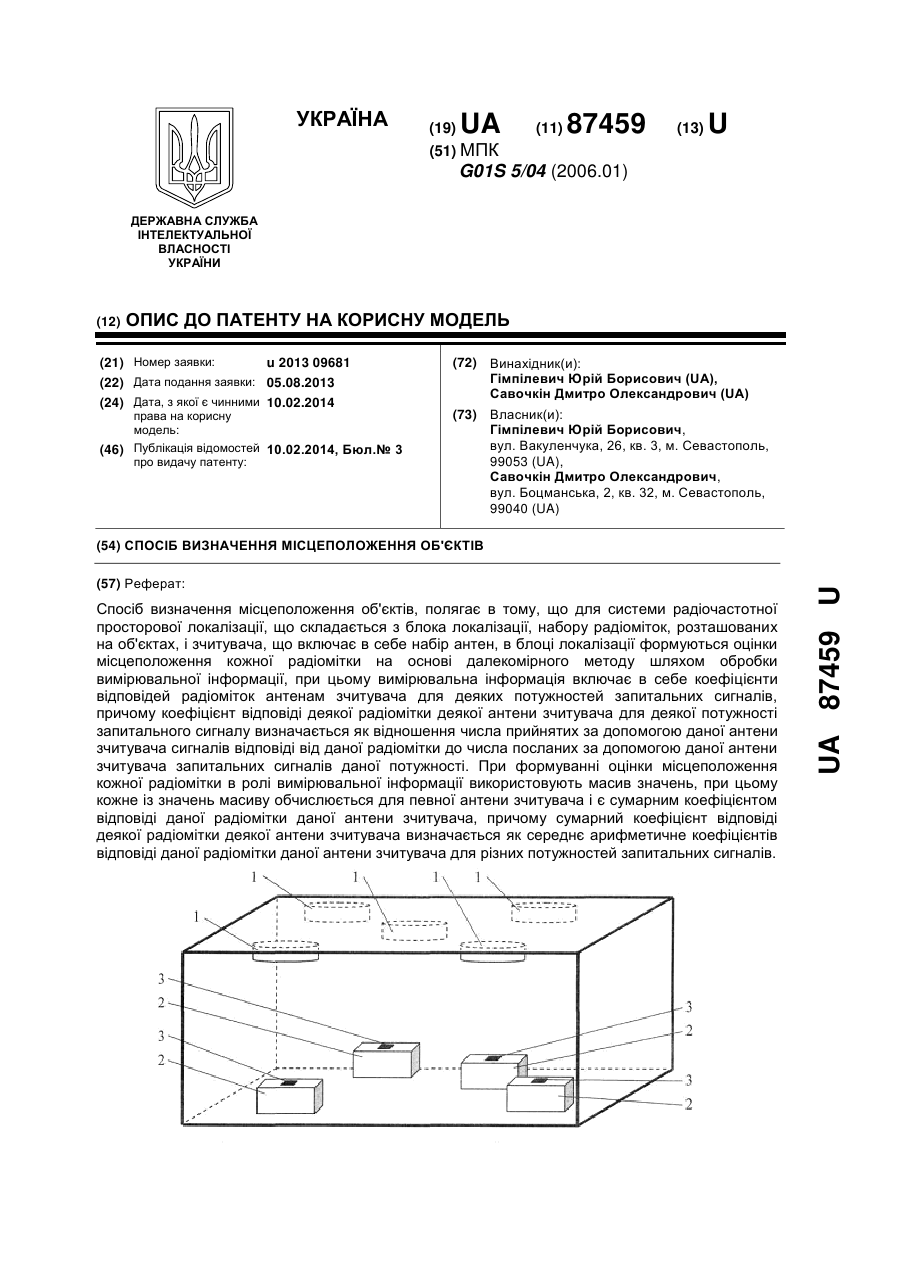
Спосіб визначення місцеположення об'єктів, який полягає в тому, що для системи радіочастотної просторової локалізації, що складається з блока локалізації, набору радіоміток, розташованих на об'єктах, і зчитувача, що включає в себе набір антен, в блоці локалізації формуються оцінки місцеположення кожної радіомітки на основі далекомірного методу шляхом обробки вимірювальної інформації, при цьому вимірювальна інформація включає в себе...
Спосіб і пристрій підтримки послуг визначення місцеположення із вдосконаленим рівнем послуги визначення місцеположення
Номер патенту: 103394
Опубліковано: 10.10.2013
Автори: Едж Стефен В., Вахтер Андреас К.
МПК: H04L 29/08, H04W 4/20, H04W 4/02
Мітки: спосіб, вдосконаленим, підтримки, визначення, пристрій, рівнем, послуги, послуг, місцеположення
Формула / Реферат:
1. Спосіб отримання послуги визначення місцеположення, що містить етапи, на яких:обмінюються щонайменше одним повідомленням між терміналом і сервером визначення місцеположення один раз для встановлення розширеного сеансу визначення місцеположення визначеної тривалості, включаючи етапи, на яких: відправляють перше повідомлення від термінала на сервер визначення місцеположення для ініціювання встановлення розширеного сеансу...
Спосіб визначення місцеположення свищів у виробах
Номер патенту: 27486
Опубліковано: 12.11.2007
Автори: Філоненко Сергій Федорович, Пономаренко Олександр Васильович, Бабак Віталій Павлович
МПК: G01M 3/00, F17D 5/02, G01N 29/14, G01N 29/00
Мітки: виробах, місцеположення, свищів, спосіб, визначення
Формула / Реферат:
Спосіб визначення місцеположення свищів у виробах, що включає встановлення на об'єкті контролю двох датчиків, реєстрацію сигналів акустичної емісії з одночасним вимірюванням їх характеристик, за якими визначають місцеположення свищів, який відрізняється тим, що як вищезгадані характеристики використовують положення в часі енергетичного центра ваги пікового сигналу у взаємній кореляційній функції, за яким визначають місцеположення свища у...
Спосіб визначення напрямку на постійні точкові джерела гамма-випромінювання в просторі
Номер патенту: 85910
Опубліковано: 10.12.2013
Автори: Білик Захар Валентинович, Григор'єв Олександр Миколайович, Марущенко Володимир Васильович, Сакун Олександр Валерійович
МПК: G01T 1/169, G01T 1/16, G01T 1/167
Мітки: визначення, гамма-випромінювання, просторі, джерела, спосіб, напрямку, точкові, постійні
Формула / Реферат:
Спосіб визначення напрямку на постійні точкові джерела гамма-випромінювання в просторі, в якому визначення напрямку на гамма-джерело проводять за вимірюванням відношення щільностей потоку фотонів, що реєструють детекторами, який відрізняється тим, що детектори розташовують всередині поглиначів заданої геометричної форми, яка визначає відповідну щільність потоку фотонів обернено пропорційно товщині поглинача, крізь яку проходять фотони, а...
Попередній патент: Пачка для тютюнових виробів, групова упаковка, що містить сукупність пачок, та заготовка для виготовлення пачок для тютюнових виробів
Наступний патент: Циклон з вхідними трубопроводами
Випадковий патент: Пристрій для збору сечі