Спосіб видобування відкладень із морського дна

Формула / Реферат
1. Спосіб видобування відкладень із морського дна з використанням надводного плавзасобу, не прив'язаного до морського дна, і першого і другого всмоктувальних самохідних агрегатів, які переміщуються по морському дну для всмоктування відкладень, і кожний з яких з'єднаний з надводним плавзасобом відповідним гнучким райзером, по якому суспензія з відкладень передається зі всмоктувальних самохідних агрегатів на надводний плавзасіб, в якому:
здійснюють переміщення першого і другого всмоктувальних самохідних агрегатів назад і вперед по морському дну по множині смуг руху так, що агрегати переміщуються, значно віддаляючись від надводного плавзасобу, з виконанням повороту або зміни напрямку руху на зворотний кожним агрегатом в кінці кожної смуги руху таким способом, що смуги руху розташовуються суміжно одна з одною для розробки відкладень по суті без проміжків між суміжними смугами руху,
при цьому тільки всмоктувальні самохідні агрегати спираються на морське дно.
2. Спосіб за п. 1, в якому додатково здійснюють переміщення першого всмоктувального самохідного агрегату по першій захватці, при цьому захватка охоплюється самохідним агрегатом, який переміщується в першій смузі руху в подовжньому напрямку від першого кінця захватки до другого кінця, який виконує невелике бічне зміщення перед поверненням подовжньо до першого кінця по смузі руху, суміжною з першою смугою руху, і який повторно переміщується таким чином між двома кінцями, кожного разу вздовж смуги руху, суміжної в поперечному напрямку з попередньою смугою руху до завершення першої захватки;
одночасне переміщення другого всмоктувального самохідного агрегату аналогічним способом у другій захватці, суміжній в поперечному напрямку з першою захваткою, так що поперечний інтервал між першим і другим всмоктувальними самохідними агрегатами залишається по суті постійним повсюдно; і
по завершенні роботи на першій і другій захватках переміщення першого і другого всмоктувальних самохідних агрегатів на третю і четверту захватки, суміжні в подовжньому напрямку з першою і другою захватками відповідно, і їх охоплення способом, аналогічним до застосованого на першій і другій захватках.
3. Спосіб за п. 2, в якому додатково здійснюють переміщення надводного плавзасобу в поперечному напрямку, коли всмоктувальні самохідні агрегати переміщуються на першій і другій захватках, і переміщення надводного плавзасобу в подовжньому напрямку, коли всмоктувальні самохідні агрегати переміщуються на третю і четверту захватки.
4. Спосіб за будь-яким з попередніх пунктів, в якому невелике бічне зміщення на першій і другій захватках має місце в протилежному поперечному напрямку відповідно на третій і четвертій захватках.
5. Спосіб за п. 1, в якому додатково здійснюють переміщення надводного плавзасобу в подовжньому напрямку і переміщення першого і другого всмоктувальних самохідних агрегатів у поперечному напрямку.
6. Спосіб за п. 5, в якому додатково здійснюють переміщення кожного зі всмоктувальних агрегатів по одному з кожної сторони надводного плавзасобу.
7. Спосіб за п. 5, в якому додатково здійснюють переміщення кожного зі всмоктувальних агрегатів з обох сторін надводного плавзасобу.
8. Спосіб за п. 1, в якому додатково здійснюють етапи переміщення першого і другого всмоктувальних самохідних агрегатів по шляху у вигляді дуги окружності з центром по суті в точці, де відповідний гнучкий райзер прикріплюється до надводного плавзасобу.
9. Спосіб за п. 1 або 5, в якому додатково здійснюють переміщення кожного зі всмоктувальних агрегатів по одному з кожної сторони надводного плавзасобу.
10. Спосіб за п. 8, в якому додатково здійснюють переміщення кожного зі всмоктувальних агрегатів з обох сторін надводного плавзасобу.
11. Спосіб за будь-яким з попередніх пунктів, в якому додатково здійснюють виконання кожним всмоктувальним самохідним агрегатом повороту по суті на 180° при досягненні кінця смуги руху.
12. Спосіб за будь-яким з попередніх пунктів, в якому кожний зі всмоктувальних агрегатів має вхідний отвір на кожному кінці, і спосіб додатково містить зміну напрямку руху на зворотний кожним таким агрегатом при досягненні кінця смуги руху.
Текст
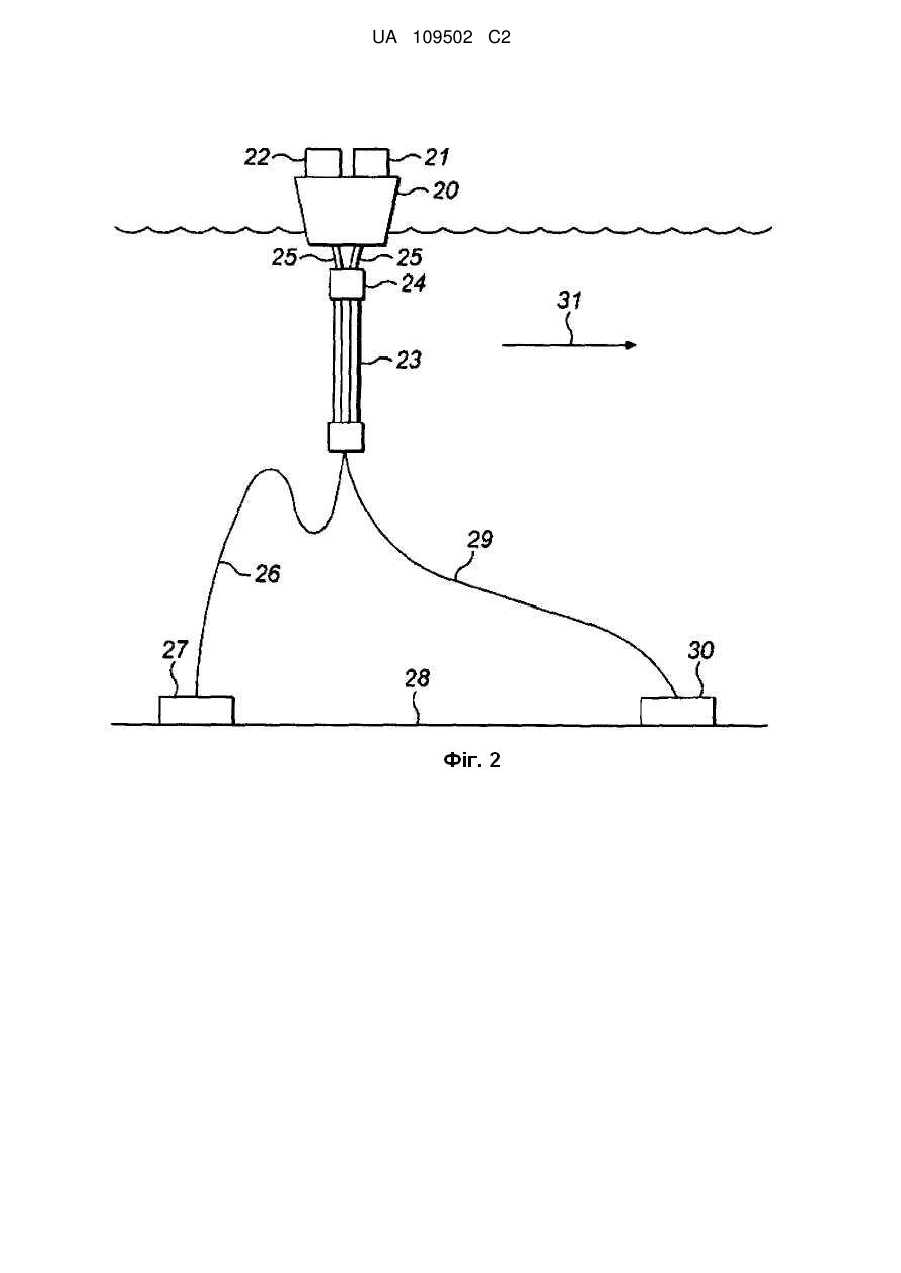
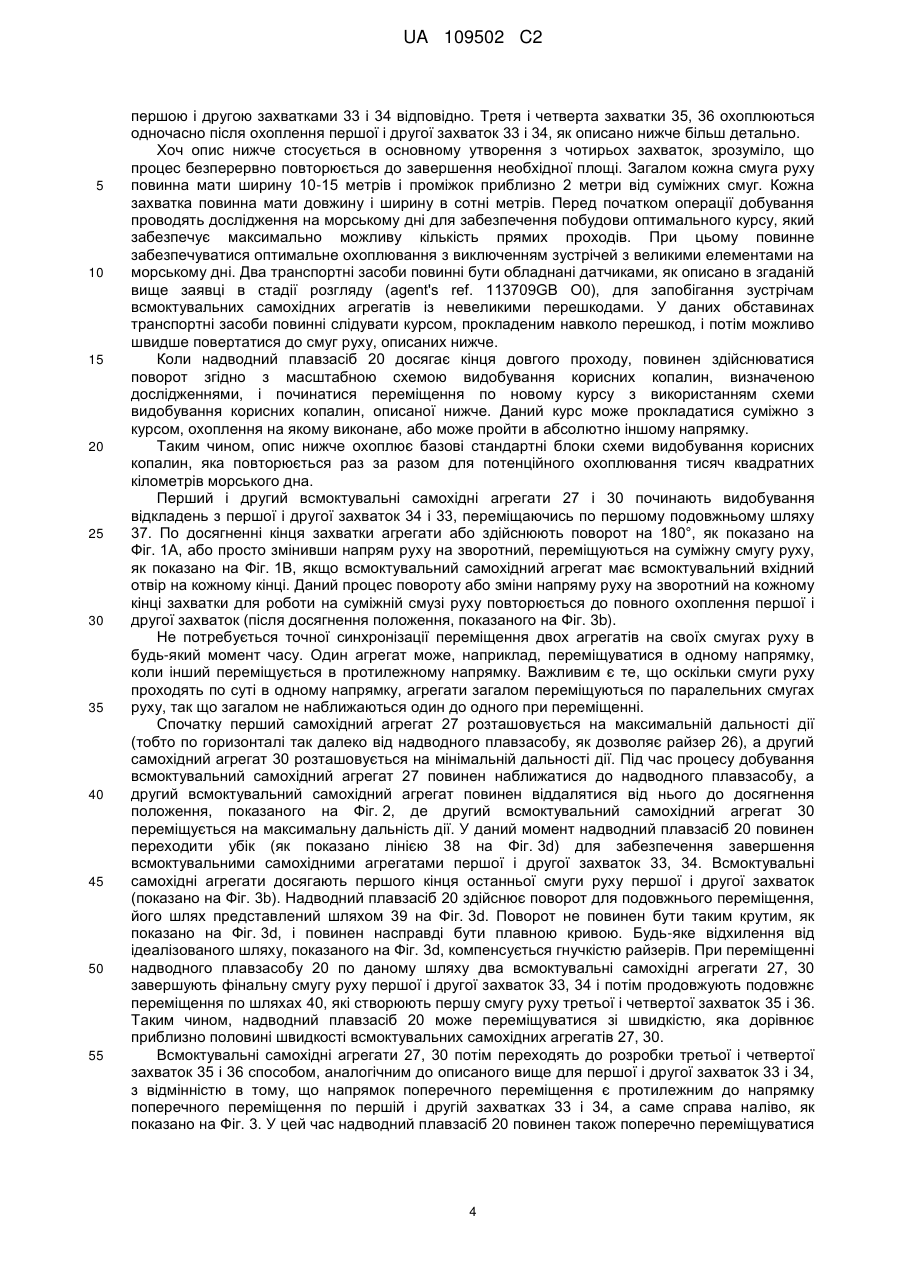
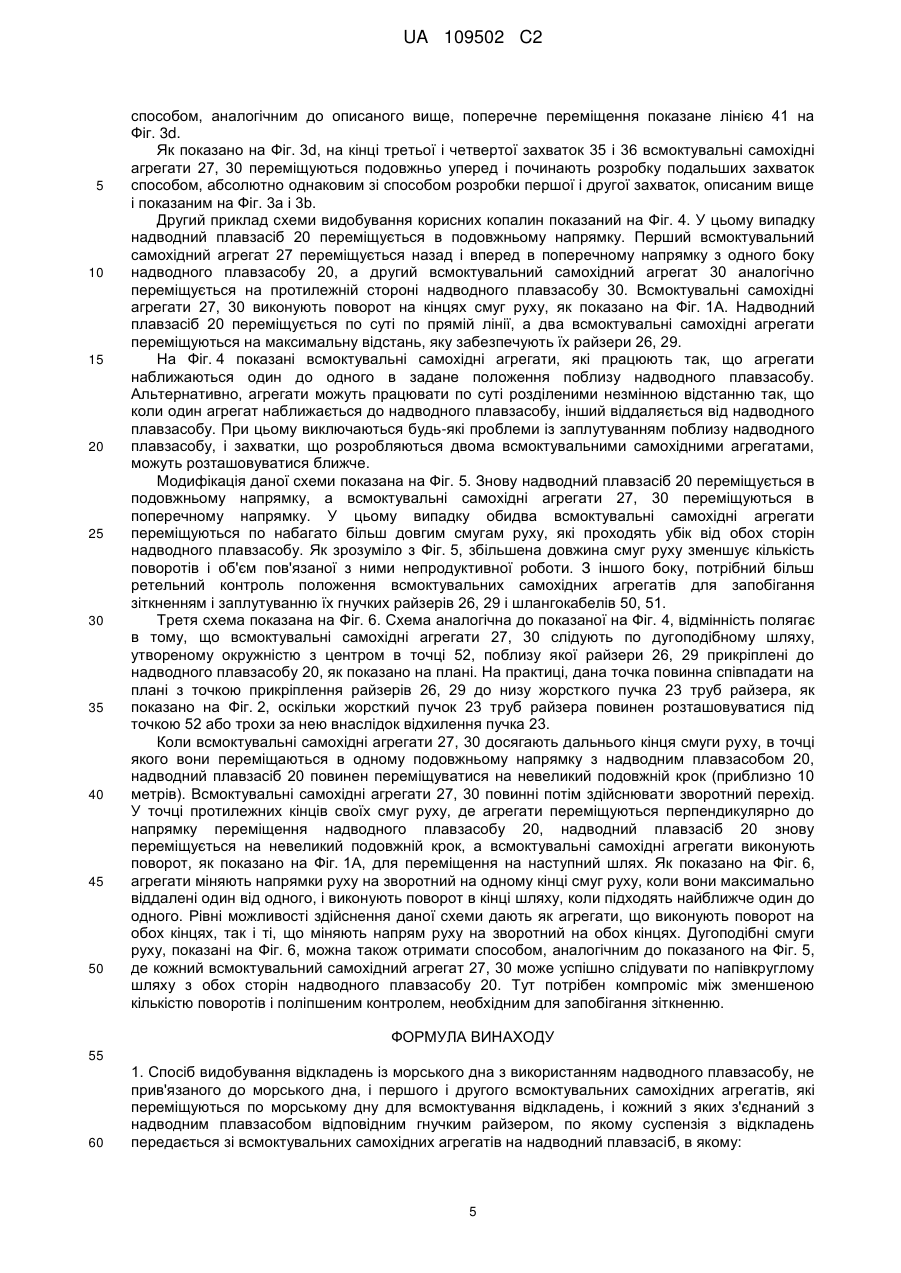
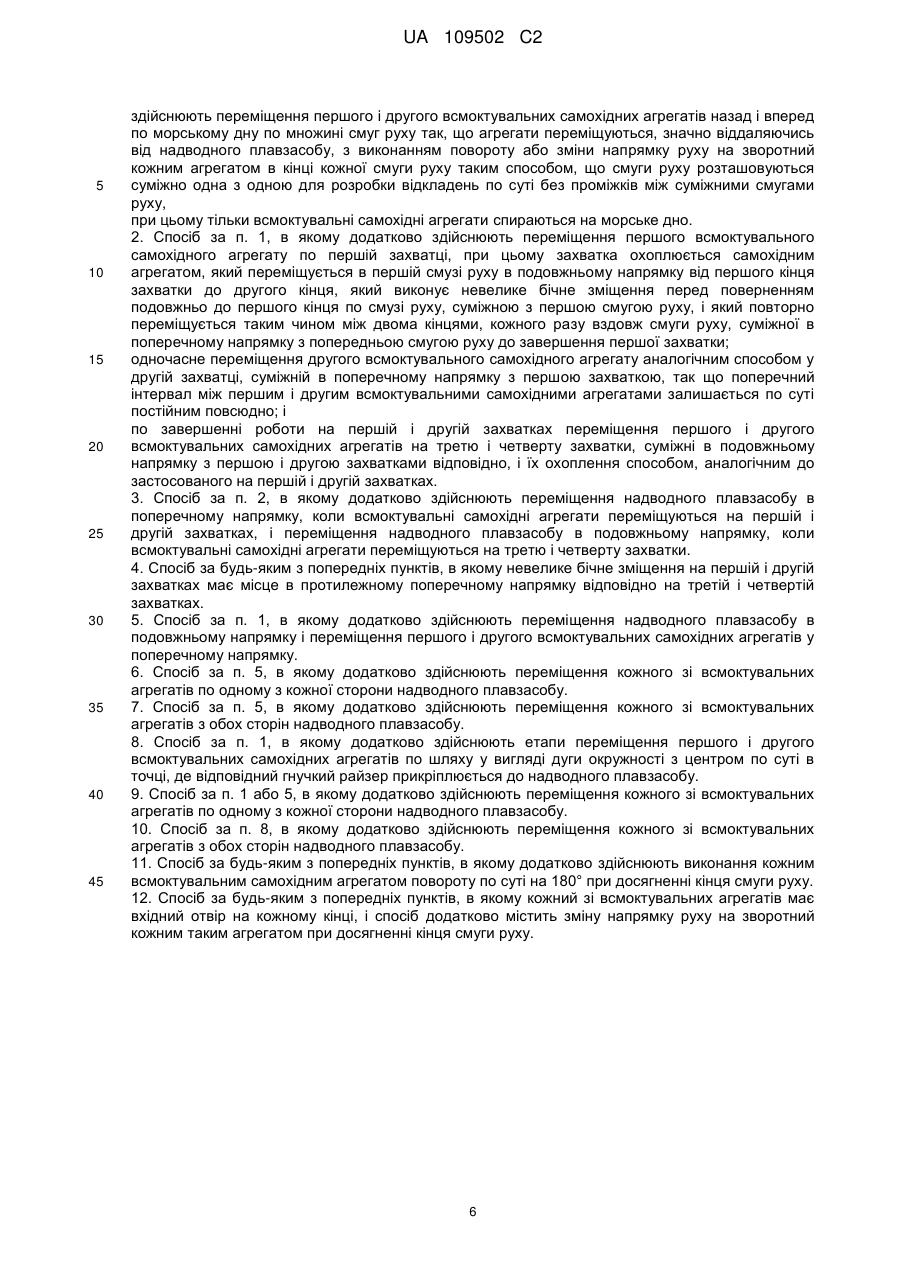
Реферат: Винахід належить до галузі видобування відкладень із морського дна, зокрема до способу видобування відкладень із морського дна з використанням надводного плавзасобу (20), не прив'язаного до морського дна, і першого і другого всмоктувальних самохідних агрегатів (27; 30), які переміщуються по морському дну для всмоктування відкладень, і кожний з яких з'єднаний з надводним плавзасобом відповідним гнучким райзером (26; 29), по якому суспензія з відкладень передається зі всмоктувальних самохідних агрегатів на надводний плавзасіб. Відповідно до винаходу здійснюють переміщення першого і другого всмоктувальних самохідних агрегатів назад і вперед по морському дну в множині смуг руху так, що агрегати переміщуються, значно віддаляючись від надводного плавзасобу, з виконанням повороту або зміни напрямку руху на зворотний кожним агрегатом в кінці кожної смуги руху таким способом, що смуги руху розташовуються суміжно одна з одною для розробки відкладень по суті без проміжків між суміжними смугами руху. Тільки всмоктувальні самохідні агрегати спираються на морське дно. UA 109502 C2 (12) UA 109502 C2 UA 109502 C2 5 10 15 20 25 30 35 40 45 50 55 60 Даний винахід стосується способу видобування відкладень з морського дна. Такий спосіб розкритий в заявці WO 2010/000289. У способі задіяні надводний плавзасіб і всмоктувальний самохідний агрегат, який переміщається по морському дну. Всмоктувальний самохідний агрегат прикріплений до надводного плавзасобу гнучким райзером, по якому суспензія з відкладень передається зі всмоктувального самохідного агрегату на надводний плавзасіб. Для рентабельності спосіб добування повинен мати можливо більш високу ефективність. Дане означає, що повинен реалізовуватися найвищий можливий темп добування при найменших можливих витратах. Ряд чинників впливає на темп добування, серед них продуктивність насоса і швидкість всмоктувального самохідного агрегату, при цьому експлуатаційні витрати в значній мірі визначає вартість споживаної електроенергії. Дальність дії всмоктувальних самохідних агрегатів відносно надводного плавзасобу (тобто горизонтальна відстань, на яку агрегати можуть відходити від надводного плавзасобу) визначається довжиною гнучкого райзера. Хоча більш довгий гнучкий райзер забезпечує збільшену дальність дії, таке рішення також має недолік, що полягає в збільшенні ваги всмоктувального самохідного агрегату, і також в збільшенні сил опору і інерції на всмоктувальному самохідному агрегаті при переміщенні і маневруванні. Найбільш нескладний спосіб видобування відкладень може передбачати просте проходження всмоктувального самохідного агрегату за надводним плавзасобом, де обидва переміщаються по одній смузі руху. Разом з тим, в даних обставинах всмоктувальний самохідний агрегат повинен переміщатися зі швидкістю надводного плавзасобу. Дане є небажаним з міркувань виникнення проблем із безпекою, що обумовлюються просуванням системи райзера у воді з відносно високими швидкостями. При цьому неважко пошкодити всмоктувальний самохідний агрегат при нештатній роботі останнього. Звіт компанії Pisces Environmental Services (Pty) Ltd для Benguela Current Large Marine Ecosystem Programme під назвою "Data Gathering і Gap Analysis for Assessment of Cumulative Effects of Marine Diamond Mining Activities on the BCLME Region" (Project BEHP/CEA/03/02), Chapter 4: Mining Methods, стор. 165-168; опубліковано в березні 2008 p.; доступний за адресою www.bclme.org; розкриває використання гусеничного транспортера, який працює на морському дні, для розробки корисних копалин на морському дні. Тут керує переміщенням транспортних засобів оператор, який використовує джойстик для здійснення маневрів агрегату. При цьому не забезпечується проходження суворо за заданою схемою. Згідно з даним винаходом створений спосіб видобування відкладень із морського дна з використанням надводного плавзасобу і першого і другого всмоктувальних самохідних агрегатів, які переміщаються по морському дну для всмоктування відкладень, і кожний з яких з'єднаний з надводним плавзасобом відповідним гнучким райзером, по якому суспензія із відкладень передається зі всмоктувальних самохідних агрегатів на надводний плавзасіб, причому спосіб містить переміщення першого і другого всмоктувальних самохідних агрегатів назад і вперед по морському дну в множині смуг руху так, що агрегати переміщаються, значно віддаляючись від надводного плавзасобу з виконанням повороту або зміни напрямку руху на зворотний кожним агрегатом в кінці кожної смуги руху таким способом, що смуги руху розташовуються суміжно одна з одною для розробки відкладень по суті без проміжків між суміжними смугами руху. У даному винаході не вимагається від всмоктувальних самохідних агрегатів підтримки швидкості, яка співпадає зі швидкістю надводного плавзасобу. Додатково, при розробці копалин на морському дні в суміжних смугах руху площа морського дна може охоплюватися без залишення проміжків між смугами, що поліпшує ефективність робіт. Використання декількох всмоктувальних самохідних агрегатів є переважним, оскільки забезпечує безперервність ведення робіт. Запасний всмоктувальний самохідний агрегат можна тримати на палубі надводного плавзасобу, і якщо один всмоктувальний самохідний агрегат виходить з ладу, його можна замінити запасним самохідним агрегатом, коли інший самохідний агрегат або агрегати продовжують працювати. Піднятий самохідний агрегат можна ремонтувати, продовжуючи роботи в штатному режимі. Хоч описана система з двома такими самохідними агрегатами, даний винахід також є застосовним до більшої кількості самохідних агрегатів. На Фіг. 1А показаний всмоктувальний самохідний агрегат 1, який має вхідний отвір на одному кінці. Даний самохідний агрегат переміщується вздовж першої смуги 2 руху до повороту на 180° на поворотному колі 3 і повернення по другій смузі 4 руху. Всмоктувальний самохідний агрегат 1 виконує додатковий прохід, тепер переміщаючись по третій смузі руху 5 до другого 1 UA 109502 C2 5 10 15 20 25 30 35 40 45 50 55 60 поворотного кола 6. Як можна бачити на Фіг. 1А, є значне перекривання 7 між двома поворотними колами 3, 6, де робота всмоктувального самохідного агрегату не є оптимальною. На Фіг. 1В показаний другий самохідний агрегат 8, який має всмоктувальний вхідний отвір на кожному з кінців. Замість повороту на 180° самохідний агрегат 8, коли досягає кінця першої смуги 9, 10 руху, просто переходить заднім ходом у суміжну смугу 11, 12 руху, не розвертаючись. Як зрозуміло з Фіг. 1В, тут зони 13, 14 всмоктувальні самохідні агрегати пропускають, що призводить до неефективної роботи всмоктування. Звідси, для максимізації ефективності добування, кількість поворотів на схемі видобування корисних копалин повинна бути мінімізована. Тому переважно спосіб додатково містить переміщення першого всмоктувального самохідного агрегату по першій захватці, де захватку охоплює самохідний агрегат, що переміщається в першій смузі руху в подовжньому напрямку від першого кінця захватки до другого кінця, що виконує невелике бічне зміщення перед поверненням подовжньо до першого кінця по смузі руху, суміжною з першою смугою руху, і який повторно переміщається таким чином між двома кінцями, кожного разу вздовж смуги руху, розташованої збоку і суміжної з попередньою смугою руху, до завершення першої захватки; одночасно, переміщення другого всмоктувального самохідного агрегату аналогічним способом у другій захватці, суміжній в поперечному напрямку з першою захваткою, так що поперечний інтервал між першим і другим всмоктувальними самохідними агрегатами залишається по суті постійним повсюдно; і по завершенні роботи на першій і другій захватках переміщення першого і другого всмоктувальних самохідних агрегатів на третю і четверту захватки, суміжні в подовжньому напрямку з першою і другою захватками відповідно, і їх охоплення способом, аналогічним до застосованого на першій і другій захватках. Дане створює ефективну схему видобування корисних копалин, оскільки перший і другий всмоктувальні самохідні агрегати можуть триматися на по суті постійній відстані один від одного, унеможливлюючи можливість зіткнення і заплутування. Друге, оскільки всмоктувальні самохідні агрегати переміщаються подовжньо на першій і другій захватках, які є суміжними одна з одною в поперечному напрямку, можна отримати оптимальне використання відрізка довжини райзера, яке дає в результаті більш довгі смуги руху, що поліпшує продуктивність порівняно зі схемами видобування корисних копалин, в яких всмоктувальні самохідні агрегати переміщаються в поперечному напрямку. Надводний плавзасіб може просто повільно переміщуватися в подовжньому напрямку, при цьому не відстаючи від всмоктувальних самохідних агрегатів при їх переміщенні на третю і четверту захватки і подальшому переміщенні на нові захватки. Разом з тим, переважно, спосіб додатково містить переміщення надводного плавзасобу в поперечному напрямку, коли всмоктувальні самохідні агрегати переміщуються на першій і другій захватках, і переміщення надводного плавзасобу в подовжньому напрямку, коли всмоктувальні самохідні агрегати переміщаються на третю і четверту захватки. При переміщенні надводного плавзасобу в поперечному напрямку, коли всмоктувальні самохідні агрегати переміщаються по захватках, ширину захватки можна збільшувати для будь-якої заданої довжини райзера. Дане забезпечує ефективне використання більш короткого райзера. Коли надводний плавзасіб переміщується в подовжньому напрямку при переміщенні всмоктувальних самохідних агрегатів в третю і четверту захватки, від плавзасобу потрібне тільки переміщення зі швидкістю, яка приблизно дорівнює половині швидкості всмоктувальних самохідних агрегатів, так що самохідні агрегати повинні переміщуватися від одного кінця однієї захватки до протилежного кінця другої захватки, насправді переміщаючись на довжину двох захваток, а надводний плавзасіб переміщується загалом від середини однієї захватки до середини суміжної захватки на відстань, яка приблизно дорівнює довжині однієї захватки. По досягненні кінця першої і другої захваток всмоктувальні самохідні агрегати можуть переміщуватися в поперечному напрямку на всю ширину захватки, так що самохідні агрегати потім починають охоплювати наступну захватку в тому ж поперечному напрямку, в якому вони охоплювали попередню захватку. Разом з тим, переважне невелике бічне зміщення відбувається на першій і другій захватках в протилежному до поперечного напрямку від напрямку відповідно на третій і четвертій захватці. По суті, вказане означає, що кожна подовжньо суміжна захватка охоплюється в поперечному напрямку, протилежному до поперечного напрямку попередньої захватки. Дане забезпечує більш ефективну схему видобування корисних копалин і вимагає зменшеного поперечного переміщення надводного плавзасобу. Для другої переважної схеми спосіб переважно містить переміщення надводного плавзасобу в подовжньому напрямку і переміщення першого і другого всмоктувальних 2 UA 109502 C2 5 10 15 20 25 30 35 40 45 50 55 60 самохідних агрегатів в поперечному напрямку. При такій схемі надводний плавзасіб може переміщуватися по значно більш простому шляху, коли всмоктувальні самохідні агрегати переміщуються в поперечному напрямку. По суті, таку схему можна використати, якщо більш складне керування надводним плавзасобом вважається небажаним. При такій схемі надводний плавзасіб може додатково містити переміщення кожного зі всмоктувальних агрегатів по одному з кожної сторони надводного плавзасобу. Альтернативно, спосіб може додатково містити переміщення кожного зі всмоктувальних агрегатів з обох сторін надводного плавзасобу. Перше має перевагу в тому, що кожний із двох всмоктувальних самохідних агрегатів переміщується в своєму власному просторі, а останнє забезпечує більш довгі смуги руху і, отже, зменшує кількість поворотів. Для третьої переважної схеми спосіб переважно додатково містить етапи переміщення першого і другого всмоктувальних самохідних агрегатів по шляху у вигляді дуги окружності з центром по суті в точці, де гнучкий райзер прикріплений до надводного плавзасобу. Тут є перевага в тому, що "дальність дії" кожного райзера залишається по суті постійною, і також створюються більш довгі смуги руху при бічному пристрої, описаному вище. Знову, спосіб може додатково містити переміщення кожного зі всмоктувальних агрегатів на кожній стороні надводного плавзасобу, або переміщення кожного зі всмоктувальних самохідних агрегатів з обох сторін надводного плавзасобу. Кожний всмоктувальний самохідний агрегат може мати вхідний отвір на кожному кінці, в такому випадку агрегати переміщуються між кінцями захватки не розвертаючись кожного разу. Разом з тим, переважно, спосіб додатково містить виконання кожним всмоктувальним самохідним агрегатом повороту по суті на 180° кожного разу по досягненні кінця смуги руху перед поверненням на протилежний кінець. Даний спосіб можна використовувати з самохідним агрегатом з одним всмоктувальним вхідним отвором, який може мати більш просту, більш дешеву і більш легку конструкцію. Приклади способів згідно з даним винаходом описані нижче з посиланням на прикладені креслення, на яких показане наступне. На Фіг. 1А і 1В показані схематичні плани, що ілюструють проблеми, які виникають на кінцях смуг руху. На Фіг. 2 показаний схематичний вигляд збоку системи добування. На Фіг. 3a-3d показані схематичні плани етапів першої схеми розробки корисних копалин. На Фіг. 4 показаний схематичний план етапів другої схеми розробки корисних копалин. На Фіг. 5 показаний змінений схематичний план другої схеми розробки корисних копалин, і На Фіг. 6 показаний схематичний план третьої схеми розробки корисних копалин. На Фіг. 2 показана система загалом, яка містить надводний плавзасіб 20, обладнаний насосною системою 21 і системою 22 обробки суспензії. Система райзера містить жорсткий пучок 23 труб райзера, який підвішений до цистерни 24 плавучості, і гнучкі трубопроводи 25, що проходять на надводний плавзасіб. Перший гнучкий райзер 26 проходить від жорсткого пучка 23 труб райзера на перший всмоктувальний самохідний агрегат 27, який переміщується по морському дну 28, а другий гнучкий райзер 29 проходить на другий всмоктувальний самохідний агрегат 30. Надводний плавзасіб має систему динамічного позиціонування, яка забезпечує збереження його місцерозташування і слідування заданому курсу. У процесі роботи всмоктувальні транспортні засоби переміщуються по морському дну, всмоктуючи поверхневі відкладення, які потім перекачуються по гнучких райзерах 26, 29 через жорсткий пучок 23 труб райзера і гнучкі трубопроводи 25 на надводний плавзасіб, де переробляються на збагачувальній установці 22 перед транспортуванням на берег для додаткової переробки. Підтоварна вода перекачується насосною системою 21 вниз по системі райзера для випуску поблизу морського дна. Даний варіант застосування враховує схему видобування корисних копалин, і додаткові подробиці тут не розкриваються. Подробиці для пучка 23 труб райзера розкриті в заявці в стадії розгляду (agent's ref. 113711GB00), і всмоктувальні транспортні засоби 27, 30 описані в заявці (agent's ref 113709GB00). Система загалом також описана в загальних рисах в заявці WO 2010/000289. На Фіг. 2 поперечний напрям показаний стрілкою 31, а подовжній напрям є напрямом в площину і з площини листа. Подовжній напрям показаний на Фіг. 3 стрілкою 32. Схема видобування корисних копалин описана нижче з посиланням на Фіг. 3. Як показано на Фіг. 3d, схема видобування корисних копалин має розподіл на першу захватку 33, другу захватку 34, третю захватку 35, четверту захватку 36. Перша і друга захватки 33, 34 є суміжними одна з одною в поперечному напрямку і охоплюються одночасно першим і другим всмоктувальними самохідними агрегатами 27, 30 відповідно. Третя і четверта захватки 35 і 36 є суміжними одна з одною в поперечному напрямку і суміжними в подовжньому напрямку з 3 UA 109502 C2 5 10 15 20 25 30 35 40 45 50 55 першою і другою захватками 33 і 34 відповідно. Третя і четверта захватки 35, 36 охоплюються одночасно після охоплення першої і другої захваток 33 і 34, як описано нижче більш детально. Хоч опис нижче стосується в основному утворення з чотирьох захваток, зрозуміло, що процес безперервно повторюється до завершення необхідної площі. Загалом кожна смуга руху повинна мати ширину 10-15 метрів і проміжок приблизно 2 метри від суміжних смуг. Кожна захватка повинна мати довжину і ширину в сотні метрів. Перед початком операції добування проводять дослідження на морському дні для забезпечення побудови оптимального курсу, який забезпечує максимально можливу кількість прямих проходів. При цьому повинне забезпечуватися оптимальне охоплювання з виключенням зустрічей з великими елементами на морському дні. Два транспортні засоби повинні бути обладнані датчиками, як описано в згаданій вище заявці в стадії розгляду (agent's ref. 113709GB О0), для запобігання зустрічам всмоктувальних самохідних агрегатів із невеликими перешкодами. У даних обставинах транспортні засоби повинні слідувати курсом, прокладеним навколо перешкод, і потім можливо швидше повертатися до смуг руху, описаних нижче. Коли надводний плавзасіб 20 досягає кінця довгого проходу, повинен здійснюватися поворот згідно з масштабною схемою видобування корисних копалин, визначеною дослідженнями, і починатися переміщення по новому курсу з використанням схеми видобування корисних копалин, описаної нижче. Даний курс може прокладатися суміжно з курсом, охоплення на якому виконане, або може пройти в абсолютно іншому напрямку. Таким чином, опис нижче охоплює базові стандартні блоки схеми видобування корисних копалин, яка повторюється раз за разом для потенційного охоплювання тисяч квадратних кілометрів морського дна. Перший і другий всмоктувальні самохідні агрегати 27 і 30 починають видобування відкладень з першої і другої захваток 34 і 33, переміщаючись по першому подовжньому шляху 37. По досягненні кінця захватки агрегати або здійснюють поворот на 180°, як показано на Фіг. 1А, або просто змінивши напрям руху на зворотний, переміщуються на суміжну смугу руху, як показано на Фіг. 1В, якщо всмоктувальний самохідний агрегат має всмоктувальний вхідний отвір на кожному кінці. Даний процес повороту або зміни напряму руху на зворотний на кожному кінці захватки для роботи на суміжній смузі руху повторюється до повного охоплення першої і другої захваток (після досягнення положення, показаного на Фіг. 3b). Не потребується точної синхронізації переміщення двох агрегатів на своїх смугах руху в будь-який момент часу. Один агрегат може, наприклад, переміщуватися в одному напрямку, коли інший переміщується в протилежному напрямку. Важливим є те, що оскільки смуги руху проходять по суті в одному напрямку, агрегати загалом переміщуються по паралельних смугах руху, так що загалом не наближаються один до одного при переміщенні. Спочатку перший самохідний агрегат 27 розташовується на максимальній дальності дії (тобто по горизонталі так далеко від надводного плавзасобу, як дозволяє райзер 26), а другий самохідний агрегат 30 розташовується на мінімальній дальності дії. Під час процесу добування всмоктувальний самохідний агрегат 27 повинен наближатися до надводного плавзасобу, а другий всмоктувальний самохідний агрегат повинен віддалятися від нього до досягнення положення, показаного на Фіг. 2, де другий всмоктувальний самохідний агрегат 30 переміщується на максимальну дальність дії. У даний момент надводний плавзасіб 20 повинен переходити убік (як показано лінією 38 на Фіг. 3d) для забезпечення завершення всмоктувальними самохідними агрегатами першої і другої захваток 33, 34. Всмоктувальні самохідні агрегати досягають першого кінця останньої смуги руху першої і другої захваток (показано на Фіг. 3b). Надводний плавзасіб 20 здійснює поворот для подовжнього переміщення, його шлях представлений шляхом 39 на Фіг. 3d. Поворот не повинен бути таким крутим, як показано на Фіг. 3d, і повинен насправді бути плавною кривою. Будь-яке відхилення від ідеалізованого шляху, показаного на Фіг. 3d, компенсується гнучкістю райзерів. При переміщенні надводного плавзасобу 20 по даному шляху два всмоктувальні самохідні агрегати 27, 30 завершують фінальну смугу руху першої і другої захваток 33, 34 і потім продовжують подовжнє переміщення по шляхах 40, які створюють першу смугу руху третьої і четвертої захваток 35 і 36. Таким чином, надводний плавзасіб 20 може переміщуватися зі швидкістю, яка дорівнює приблизно половині швидкості всмоктувальних самохідних агрегатів 27, 30. Всмоктувальні самохідні агрегати 27, 30 потім переходять до розробки третьої і четвертої захваток 35 і 36 способом, аналогічним до описаного вище для першої і другої захваток 33 і 34, з відмінністю в тому, що напрямок поперечного переміщення є протилежним до напрямку поперечного переміщення по першій і другій захватках 33 і 34, а саме справа наліво, як показано на Фіг. 3. У цей час надводний плавзасіб 20 повинен також поперечно переміщуватися 4 UA 109502 C2 5 10 15 20 25 30 35 40 45 50 способом, аналогічним до описаного вище, поперечне переміщення показане лінією 41 на Фіг. 3d. Як показано на Фіг. 3d, на кінці третьої і четвертої захваток 35 і 36 всмоктувальні самохідні агрегати 27, 30 переміщуються подовжньо уперед і починають розробку подальших захваток способом, абсолютно однаковим зі способом розробки першої і другої захваток, описаним вище і показаним на Фіг. 3a і 3b. Другий приклад схеми видобування корисних копалин показаний на Фіг. 4. У цьому випадку надводний плавзасіб 20 переміщується в подовжньому напрямку. Перший всмоктувальний самохідний агрегат 27 переміщується назад і вперед в поперечному напрямку з одного боку надводного плавзасобу 20, а другий всмоктувальний самохідний агрегат 30 аналогічно переміщується на протилежній стороні надводного плавзасобу 30. Всмоктувальні самохідні агрегати 27, 30 виконують поворот на кінцях смуг руху, як показано на Фіг. 1А. Надводний плавзасіб 20 переміщується по суті по прямій лінії, а два всмоктувальні самохідні агрегати переміщуються на максимальну відстань, яку забезпечують їх райзери 26, 29. На Фіг. 4 показані всмоктувальні самохідні агрегати, які працюють так, що агрегати наближаються один до одного в задане положення поблизу надводного плавзасобу. Альтернативно, агрегати можуть працювати по суті розділеними незмінною відстанню так, що коли один агрегат наближається до надводного плавзасобу, інший віддаляється від надводного плавзасобу. При цьому виключаються будь-які проблеми із заплутуванням поблизу надводного плавзасобу, і захватки, що розробляються двома всмоктувальними самохідними агрегатами, можуть розташовуватися ближче. Модифікація даної схеми показана на Фіг. 5. Знову надводний плавзасіб 20 переміщується в подовжньому напрямку, а всмоктувальні самохідні агрегати 27, 30 переміщуються в поперечному напрямку. У цьому випадку обидва всмоктувальні самохідні агрегати переміщуються по набагато більш довгим смугам руху, які проходять убік від обох сторін надводного плавзасобу. Як зрозуміло з Фіг. 5, збільшена довжина смуг руху зменшує кількість поворотів і об'єм пов'язаної з ними непродуктивної роботи. З іншого боку, потрібний більш ретельний контроль положення всмоктувальних самохідних агрегатів для запобігання зіткненням і заплутуванню їх гнучких райзерів 26, 29 і шлангокабелів 50, 51. Третя схема показана на Фіг. 6. Схема аналогічна до показаної на Фіг. 4, відмінність полягає в тому, що всмоктувальні самохідні агрегати 27, 30 слідують по дугоподібному шляху, утвореному окружністю з центром в точці 52, поблизу якої райзери 26, 29 прикріплені до надводного плавзасобу 20, як показано на плані. На практиці, дана точка повинна співпадати на плані з точкою прикріплення райзерів 26, 29 до низу жорсткого пучка 23 труб райзера, як показано на Фіг. 2, оскільки жорсткий пучок 23 труб райзера повинен розташовуватися під точкою 52 або трохи за нею внаслідок відхилення пучка 23. Коли всмоктувальні самохідні агрегати 27, 30 досягають дальнього кінця смуги руху, в точці якого вони переміщаються в одному подовжньому напрямку з надводним плавзасобом 20, надводний плавзасіб 20 повинен переміщуватися на невеликий подовжній крок (приблизно 10 метрів). Всмоктувальні самохідні агрегати 27, 30 повинні потім здійснювати зворотний перехід. У точці протилежних кінців своїх смуг руху, де агрегати переміщуються перпендикулярно до напрямку переміщення надводного плавзасобу 20, надводний плавзасіб 20 знову переміщується на невеликий подовжній крок, а всмоктувальні самохідні агрегати виконують поворот, як показано на Фіг. 1А, для переміщення на наступний шлях. Як показано на Фіг. 6, агрегати міняють напрямки руху на зворотний на одному кінці смуг руху, коли вони максимально віддалені один від одного, і виконують поворот в кінці шляху, коли підходять найближче один до одного. Рівні можливості здійснення даної схеми дають як агрегати, що виконують поворот на обох кінцях, так і ті, що міняють напрям руху на зворотний на обох кінцях. Дугоподібні смуги руху, показані на Фіг. 6, можна також отримати способом, аналогічним до показаного на Фіг. 5, де кожний всмоктувальний самохідний агрегат 27, 30 може успішно слідувати по напівкруглому шляху з обох сторін надводного плавзасобу 20. Тут потрібен компроміс між зменшеною кількістю поворотів і поліпшеним контролем, необхідним для запобігання зіткненню. ФОРМУЛА ВИНАХОДУ 55 60 1. Спосіб видобування відкладень із морського дна з використанням надводного плавзасобу, не прив'язаного до морського дна, і першого і другого всмоктувальних самохідних агрегатів, які переміщуються по морському дну для всмоктування відкладень, і кожний з яких з'єднаний з надводним плавзасобом відповідним гнучким райзером, по якому суспензія з відкладень передається зі всмоктувальних самохідних агрегатів на надводний плавзасіб, в якому: 5 UA 109502 C2 5 10 15 20 25 30 35 40 45 здійснюють переміщення першого і другого всмоктувальних самохідних агрегатів назад і вперед по морському дну по множині смуг руху так, що агрегати переміщуються, значно віддаляючись від надводного плавзасобу, з виконанням повороту або зміни напрямку руху на зворотний кожним агрегатом в кінці кожної смуги руху таким способом, що смуги руху розташовуються суміжно одна з одною для розробки відкладень по суті без проміжків між суміжними смугами руху, при цьому тільки всмоктувальні самохідні агрегати спираються на морське дно. 2. Спосіб за п. 1, в якому додатково здійснюють переміщення першого всмоктувального самохідного агрегату по першій захватці, при цьому захватка охоплюється самохідним агрегатом, який переміщується в першій смузі руху в подовжньому напрямку від першого кінця захватки до другого кінця, який виконує невелике бічне зміщення перед поверненням подовжньо до першого кінця по смузі руху, суміжною з першою смугою руху, і який повторно переміщується таким чином між двома кінцями, кожного разу вздовж смуги руху, суміжної в поперечному напрямку з попередньою смугою руху до завершення першої захватки; одночасне переміщення другого всмоктувального самохідного агрегату аналогічним способом у другій захватці, суміжній в поперечному напрямку з першою захваткою, так що поперечний інтервал між першим і другим всмоктувальними самохідними агрегатами залишається по суті постійним повсюдно; і по завершенні роботи на першій і другій захватках переміщення першого і другого всмоктувальних самохідних агрегатів на третю і четверту захватки, суміжні в подовжньому напрямку з першою і другою захватками відповідно, і їх охоплення способом, аналогічним до застосованого на першій і другій захватках. 3. Спосіб за п. 2, в якому додатково здійснюють переміщення надводного плавзасобу в поперечному напрямку, коли всмоктувальні самохідні агрегати переміщуються на першій і другій захватках, і переміщення надводного плавзасобу в подовжньому напрямку, коли всмоктувальні самохідні агрегати переміщуються на третю і четверту захватки. 4. Спосіб за будь-яким з попередніх пунктів, в якому невелике бічне зміщення на першій і другій захватках має місце в протилежному поперечному напрямку відповідно на третій і четвертій захватках. 5. Спосіб за п. 1, в якому додатково здійснюють переміщення надводного плавзасобу в подовжньому напрямку і переміщення першого і другого всмоктувальних самохідних агрегатів у поперечному напрямку. 6. Спосіб за п. 5, в якому додатково здійснюють переміщення кожного зі всмоктувальних агрегатів по одному з кожної сторони надводного плавзасобу. 7. Спосіб за п. 5, в якому додатково здійснюють переміщення кожного зі всмоктувальних агрегатів з обох сторін надводного плавзасобу. 8. Спосіб за п. 1, в якому додатково здійснюють етапи переміщення першого і другого всмоктувальних самохідних агрегатів по шляху у вигляді дуги окружності з центром по суті в точці, де відповідний гнучкий райзер прикріплюється до надводного плавзасобу. 9. Спосіб за п. 1 або 5, в якому додатково здійснюють переміщення кожного зі всмоктувальних агрегатів по одному з кожної сторони надводного плавзасобу. 10. Спосіб за п. 8, в якому додатково здійснюють переміщення кожного зі всмоктувальних агрегатів з обох сторін надводного плавзасобу. 11. Спосіб за будь-яким з попередніх пунктів, в якому додатково здійснюють виконання кожним всмоктувальним самохідним агрегатом повороту по суті на 180° при досягненні кінця смуги руху. 12. Спосіб за будь-яким з попередніх пунктів, в якому кожний зі всмоктувальних агрегатів має вхідний отвір на кожному кінці, і спосіб додатково містить зміну напрямку руху на зворотний кожним таким агрегатом при досягненні кінця смуги руху. 6 UA 109502 C2 7 UA 109502 C2 8 UA 109502 C2 9 UA 109502 C2 10 UA 109502 C2 11 UA 109502 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 12
ДивитисяДодаткова інформація
Назва патенту англійськоюA method of recovering a deposit from the sea bed
Автори англійськоюPatriciu, Dan Costache
Автори російськоюПатричу Дан Костаке
МПК / Мітки
МПК: E21C 50/00
Мітки: спосіб, відкладень, видобування, морського, дна
Код посилання
<a href="https://ua.patents.su/14-109502-sposib-vidobuvannya-vidkladen-iz-morskogo-dna.html" target="_blank" rel="follow" title="База патентів України">Спосіб видобування відкладень із морського дна</a>
Спосіб керування роботою морського гірничовидобувного комплексу
Номер патенту: 105226
Опубліковано: 25.04.2014
Автори: Кириченко Євген Олексійович, Романюков Артем Валерійович, Кириченко Володимир Євгенович, Татуревич Артем Аркадійович, Шворак Віталій Григорович, Євтєєв Володимир Васильович
МПК: E21C 50/00, F04F 1/00
Мітки: роботою, гірничовидобувного, спосіб, керування, комплексу, морського
Формула / Реферат:
1. Спосіб керування роботою морського гірничовидобувного комплексу, що включає геологічне дослідження підводного родовища корисних копалин та підйом видобутих на глибині корисних копалин на поверхню водного басейну, який відрізняється тим, що попередньо задають величину продуктивності видобутку корисних копалин, формують перелік технологій підводної розробки родовищ корисних копалин, з сформованого переліку вибирають технології, які...
Спосіб видобування металофази з природних і техногенних руд
Номер патенту: 78711
Опубліковано: 25.03.2013
Автори: Чугунов Юрій Давидович, Іванченко Владислав Вікторович
МПК: C22B 61/00
Мітки: металофази, природних, техногенних, видобування, спосіб, руд
Формула / Реферат:
Спосіб видобування металофази з природних і техногенних руд, що включає здрібнювання вихідного матеріалу, класифікацію отриманого порошку й збагачення розкласифікованого матеріалу, який відрізняється тим, що здрібнювання вихідного матеріалу й класифікацію одержуваного порошку методом пневмосепарації здійснюють спільно при накладенні на комбінований процес відцентрового поля, причому здрібнювання вихідного матеріалу здійснюють багаторазовим...
Спосіб визначення властивостей грунтів і мінералів морського дна
Номер патенту: 20045
Опубліковано: 25.12.1997
Автори: Сукач Михайло Кузьмич, Сукач Сергій Михайлович, Сукач Олексій Михайлович
МПК: G01N 21/25, G01V 11/00, G01N 21/17
Мітки: спосіб, властивостей, морського, визначення, грунтів, дна, мінералів
Формула / Реферат:
Спосіб визначення властивостей грунтів і мінералів морського дна, який включає освітлення об'єкта, експонування фотоплівки відбитим світлом, її аналіз для визначення спектральних характеристик відбивання і визначення по них фізико-хімічних властивостей грунтів і мінералів, який відрізняється тим, що фотопристрій спускають на задану відстань від дна, обумовлену величиною мутності води та потужністю освітлювача, і експонують фотоплівки не менш,...
Спосіб добування піску з морського дна
Номер патенту: 17851
Опубліковано: 03.06.1997
Автор: Кресин Валентин Аврамович
Мітки: добування, піску, спосіб, морського, дна
Формула / Реферат:
1. Способ добычи песка с морского дна, включающий установку грунтозаборного устройства на дне, отсос прокрывающего слоя донных отложений, гидроразмыв песка в зоне забоя с последующим приготовлением пульпы и подачей его на плавсредство, отличающийся тем, что в процессе гидродобычи контролируют положение всаса грунтозаборного устройства относительно нижней границы покрывающего слоя донных отложений в зоне забоя, при этом, в качестве рабочей...
Спосіб і пристрій видалення відкладень із цистерни
Номер патенту: 86351
Опубліковано: 27.04.2009
Автори: Рікк Рональд, Хріст Бернхард, Вітінг Хольгер
МПК: B08B 9/08
Мітки: видалення, спосіб, відкладень, пристрій, цистерни
Формула / Реферат:
1. Пристрій для видалення відкладень із утвореного бічними стінками, дном і верхнім перекриттям чи кришкою (30, 32, 34) вмістища (10, 12, 14, 28), такого, як цистерна, в якому над відкладеннями зібралася рідина (62), причому вмістище доступне через наявний у верхньому перекритті чи кришці виконаний з можливістю закривання отвір (18, 20, 22, 38), який містить вводжуваний до вмістища через отвір і виконаний з можливістю переміщення у вмістищі...
Попередній патент: Пристрій для закріплення циліндричних флексографічних гільз на формотримачі
Наступний патент: Прискорювальний клапан
Випадковий патент: Інгібітор корозії металів