Спосіб визначення місцезнаходження об’єкта
Номер патенту: 119752
Опубліковано: 10.10.2017
Автори: Недайвода Ігор Володимирович, Прімін Михайло Андрійович





Формула / Реферат
Спосіб визначення місцезнаходження об'єкта, заснований на тому, що об'єкт розташовують у магнітному полі; вибирають місцезнаходження точок спостереження в площині, яка не має точок перетину з об'єктом; реєструють значення вектора магнітної індукції та його просторових похідних першого та другого порядку в кожній з вибраних точок, який відрізняється тим, що в кожній точці спостереження розташовують одноканальний аксіальний градієнтометр першого порядку; напрямок осі градієнтометра співпадає з напрямком нормалі до площини вимірювань; за отриманими значеннями перших і других просторових похідних вектора магнітної індукції виділяють точки спостереження, які найбільш віддалені від об'єкта, і визначають напрямок з кожної виділеної точки на об'єкт, а потім за значеннями вектора магнітної індукції визначають відстань від кожної виділеної точки до об'єкта; після чого за отриманими результатами визначають місце розташування об'єкта в просторі.
Текст
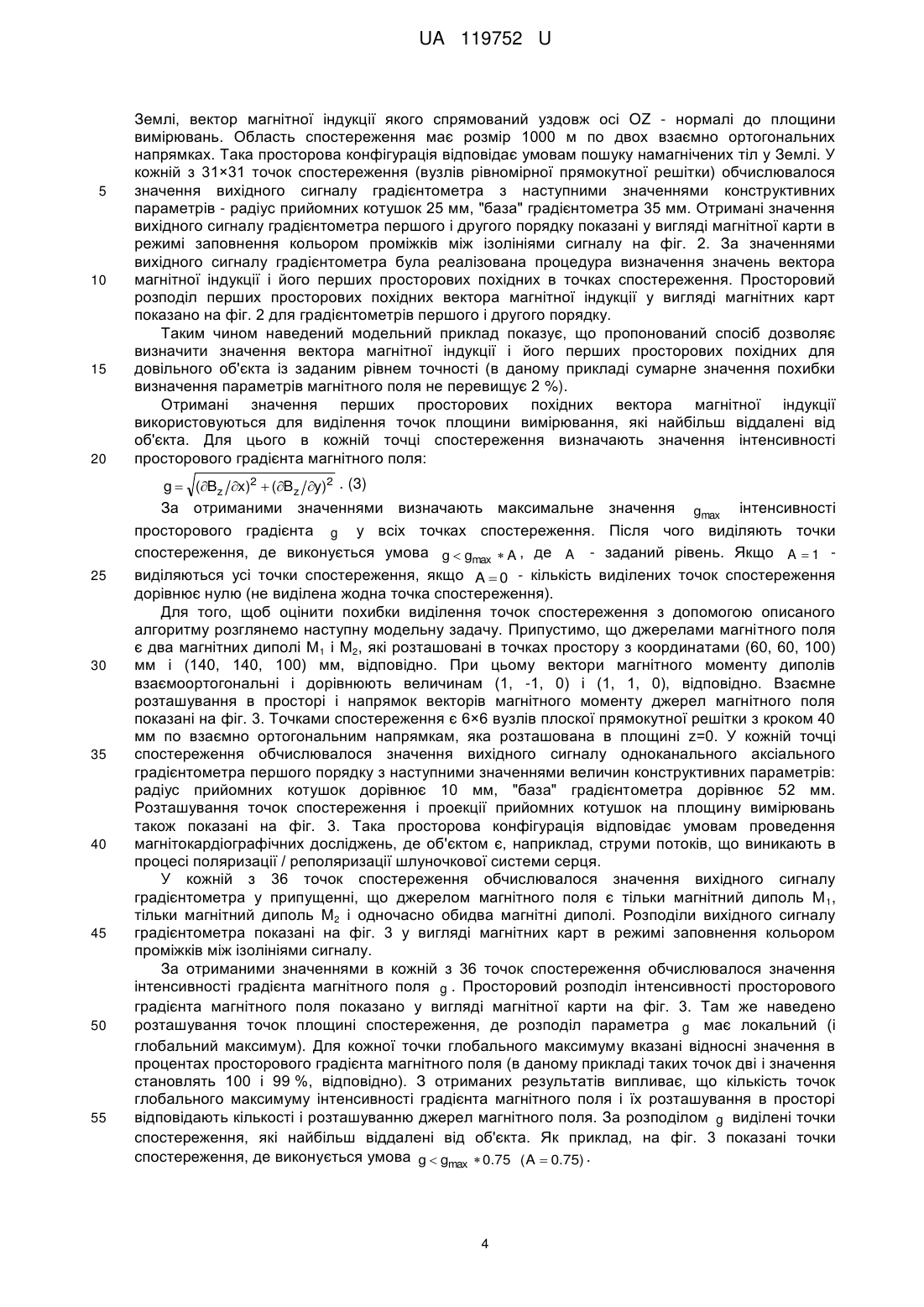
Реферат: Спосіб визначення місцезнаходження об'єкта заснований на тому, що об'єкт розташовують у магнітному полі; вибирають місцезнаходження точок спостереження в площині, яка не має точок перетину з об'єктом; реєструють значення вектора магнітної індукції та його просторових похідних першого та другого порядку в кожній з вибраних точок. В кожній точці спостереження розташовують одноканальний аксіальний градієнтометр першого порядку; напрямок осі градієнтометра співпадає з напрямком нормалі до площини вимірювань; за отриманими значеннями перших і других просторових похідних вектора магнітної індукції виділяють точки спостереження, які найбільш віддалені від об'єкта. Визначають напрямок з кожної виділеної точки на об'єкт. За значеннями вектора магнітної індукції визначають відстань від кожної виділеної точки до об'єкта. За отриманими результатами визначають місце розташування об'єкта в просторі. UA 119752 U (12) UA 119752 U UA 119752 U 5 10 15 20 25 30 35 40 45 50 55 60 Запропонована корисна модель належить до області вимірювань перемінних магнітних величин і може бути використана для контролю за місцезнаходженням і переміщенням транспортних засобів, для пошуку феромагнітних тіл під землею або під водою, для пошуку корисних копалин, під час проведення магнітокардіографічних і магнітоенцефалографічних досліджень. Відомий спосіб визначення місця розташування об'єкта, де в кожній точці спостереження розташовують 16 магнітометрів (Burghoff M., Schnabel A., Drung D., Thiel F., Knappe-Grtineberg S., Hartwig S., Kosch O., Trahms L., Koch H., Discrimination of Multiple Sources Using a SQUID Vector Magnetometer, Neurology and Clinical Neurophysiology 2004, v. 67, p. 1-3). При цьому взаємне розташування і орієнтація в просторі магнітометрів реалізовані за спеціалізованої схемою таким чином, що в заданій точці простору реєструють значення вектора магнітної індукції і п'яти просторових похідних першого порядку цього вектора. Точками спостереження є 6×6 вузлів прямокутної решітки з кроком 40 мм по двом взаємно ортогональним напрямкам, які розташовані в площині над грудною кліткою пацієнта з прив'язкою до анатомічних орієнтирів пацієнта. При цьому передбачається, що є попередня інформація про місцезнаходження об'єкта, а для опису магнітного поля описаних джерел використовується дипольне наближення. Використання попередньої інформації про місцезнаходження об'єкта, а також ітераційного процесу порівняння результатів вимірювань з результатами обчислень магнітного поля дипольного джерела в точках розташування магнітометрів призводять до істотного зниження точності визначення місця розташування об'єкта, що є недоліком зазначеного способу. В описаному способі розташування в просторі датчиків магнітного поля фіксоване, а схема вимірювань у 36 точках прямокутної плоскої решітки реалізується за допомогою послідовних переміщень об'єкта. При цьому пацієнт розташовується на кушетці, яка переміщується в лабораторній системі координат (щодо датчиків магнітного поля) в площині. Алгоритм переміщень об'єкта реалізується за допомогою спеціалізованої електромеханічної системи, яка одночасно фіксує (визначає, задає) координати кожної точки спостереження. Крім того для визначення місця розташування точок вимірювання в системі координат, пов'язаної як з об'єктом, так і з датчиками магнітного поля, використовуються спеціалізовані системи, наприклад, на основі референтних джерел магнітного поля (Патент на корисну модель № 96206, Спосіб визначення місцезнаходження об'єкта). Використання схеми "нерухомий датчик магнітного поля переміщається об'єкт" обумовлено значними похибками, які виникають при переміщенні датчика магнітного поля у просторі. Перш за все це сигнал, що виникає при переміщенні датчика в геомагнітному полі (магнітне поле Землі) - відносно об'єкта досліджень це сигнал завад. Далі - вплив магнітних полів індустріального походження (мережеві гармоніки, сигнали від металевих об'єктів, що переміщаються поблизу від точки спостереження, сигнали від близько розташованої електронної апаратури і т. і.). Зазначені сигнали реєструються і при фіксованому положенні датчика магнітного поля, однак при переміщенні вимірювача ці сигнали значно посилюються, зважаючи на істотну неоднорідність по простору (магнітне поле зазначених джерел істотно неоднорідне по простору - змінюється від точки до точки вимірювань). Таким чином керована зміна місця розташування об'єкта в просторі за заданим алгоритмом є суттєвою операцією описаного способу. В результаті описаний спосіб не може бути використаний для визначення місця розташування об'єкта, який розташований під землею або під водою. Найбільш близьким аналогом до способу, що запропоновано, вибраний спосіб визначення місця розташування об'єкта (WO Patent 2008/154679 А1, METHOD AND APPARATUS FOR DETECTION USING MAGNETIC GRADIENT TENSOR, G 01 V 3/08, G 01 R 33/02, Date of Patent: June 18, 2007). Об'єкт розташований в магнітному полі Землі. Об'єкт має феромагнітні властивості і створює магнітне поле в точках спостереження, які розташовані в площині. При цьому площина вимірювань не має точок перетину з об'єктом. У кожній точці спостереження магнітне поле реєструють за допомогою векторного магнітометра і п'яти градієнтометрів першого порядку. Після чого визначають значення величин вектора магнітної індукції і його перших просторових похідних у вузлах прямокутної рівномірної решітки в площині вимірювань. При цьому крок решітки і її місце розташування в площині вибирають виходячи з попередньої інформації про місцезнаходження об'єкта. Для кожного вузла плоскої прямокутної решітки за значеннями перших просторових похідних вектора магнітної індукції визначають напрямок на об'єкт. Після чого за значеннями вектора магнітної індукції в тій же точці визначають відстань до об'єкта. Крім того в кожному вузлі плоскою решітки визначають значення просторових інваріантів першого, другого і третього порядків. За розподілом зазначених інваріантів в площині вимірювань також визначають місце розташування об'єкта. 1 UA 119752 U 5 Таким чином спосіб-найближчий аналог. що в кожній точці спостереження розташовано одночасно векторний магнітометр і п'ять градієнтометрів першого порядку. Це пов'язано з властивостями однорідності магнітного поля - якщо точка спостереження розташована в немагнітному, непровідному, однорідному середовищі (наприклад, в повітрі), то для вектора магнітної індукції справедливі однорідні рівняння Максвелла: rot B 0 , divB 0 . (1) Звідси випливає, що тензор перших просторових похідних вектора магнітної індукції B x x B y D1 x B z x 10 15 20 25 30 35 40 45 50 B x y B y y B z y B x z B y (2) z B z z симетричний і не має сліду. Таким чином з дев'яти елементів зазначеного тензору незалежними являються тільки п'ять, наприклад Bx y , Bx z , By y , By z , Bz z . Виходячи з цього в кожній точці спостереження розташовують векторний магнітометр і п'ять градієнтометрів першого порядку, що дає повний набір інформації про магнітне поле об'єкта. Однак реалізація описаної послідовності операцій найближчого аналога має істотні обмеження на точність і надійність визначення місцезнаходження об'єкта. Використання п'яти градієнтометрів для вимірювання магнітного поля в різних точках площини вимірювань призводить до істотного зниження точності визначення місця розташування об'єкта. У способі-прототипі для реєстрації магнітного поля використовуються вузли нерегулярної плоскої решітки. При цьому розміри області спостереження набагато перевищують розміри об'єкта. Позначимо результати N вимірювань як 1, 2 ,…, N і припустимо, що точка спостереження розташована в немагнітному, непровідному, однорідному просторі, наприклад в повітрі. Тоді з однорідних рівнянь Максвелла (1) випливає, що силові лінії магнітного поля замкнені: інтеграл вектора магнітної індукції в довільній площині простору поза об'ємом об'єкта дорівнює нулю. У тому числі, розподіл однієї компоненти вектора магнітної індукції для магнітного диполя являє собою дві області з позитивними і негативними значеннями. Для сталого вирішення поставленого завдання і заданого рівня точності визначення координат об'єкта розміри області спостереження вибирають таким чином, щоб для результатів вимірювань виконувалася умова 1 0 , 2 0 ,…, N 1 0 , N 0 . Щодо способу-найближчого аналога - це означає, що сенсори магнітного поля (градієнтометри і векторний магнітометр) переміщують в площині вимірювань, по обох напрямках. При реалізації переміщень в просторі орієнтація осей градієнтометра відносно лабораторної системи координат змінюється як відповідно до алгоритму переміщень (в тому числі і на 90 або на 180 градусів), так і поза контролем (за рахунок механічних впливів, умови місця проведення вимірювань - наявності ям, пагорбів, ритвин і т. і.). При цьому виникають систематичні похибки. Дослідження показали, що похибка вимірювань магнітного поля за допомогою градієнтометра, напрямок вісі якого розташовано паралельно площині вимірювань і який переміщується у просторі у двох взаємно ортогональних напрямках, в більшості випадків становить не менше 25 %, а в окремих випадках може досягати 100 % (Gamey, TJ, 2008, Development and evaluation of an airborne superconducting quantum interference device-based magnetic gradiometer tensor system for detection, characterization and mapping of unexploded ordnance: SERDP Project MM-1316). На фіг. 1 наведені результати вимірювань магнітного поля об'єкта за допомогою трьох магнітометрів, які розташовані в одній точці простору і мають однаковий напрямок вісі реєструється х-ва складова вектора магнітної індукції (Gamey, T.J., 2008, Development and evaluation of an airborne superconducting quantum interference device-based magnetic gradiometer tensor system for detection, characterization and mapping of unexploded ordnance: SERDP Project MM-1316). У вигляді графіків показані синхронні результати вимірювань вихідного сигналу магнітометрів при переміщенні точки вимірювань по колу в площині XOY. Наведені результати дозволяють в явному вигляді оцінити систематичні похибки - по одному з каналів значення магнітного поля змінюється на протилежне (похибка більше 100 %). В результаті для способу-найближчого аналога отримуємо, що точність визначення координат об'єкту визначається систематичною похибкою вимірювань магнітного поля, яка пов'язана зі зміною (порушенням) ортогональності градієнтометру і становить понад 25 %. Крім того рівень систематичних похибок при реєстрації як вектора магнітної індукції, так і п'яти перших просторових похідних вектора магнітної індукції визначається як власними 2 UA 119752 U 5 10 15 20 25 30 35 40 45 похибками датчиків (сенсорів), так і геомагнітних полем і індустріальними перешкодами. Ортогональність осей градієнтометру, відмінності процедур балансування в однорідному магнітному полі також призводять до суттєвого зростання систематичних похибок (в порівнянні з результатами вимірювань векторного магнітометра). Вплив похибок градієнтометричних вимірювань магнітного поля, пов'язаних з балансуванням градієнтометра в однорідному магнітному полі, на точність вирішення задачі локалізації об'єкта добре відомий, значення похибки визначення координат об'єкта може становити до 10 %. Разом з тим використання п'яти градієнтометрів для вимірювання магнітного поля призводить до істотного зниження надійності оскільки для визначення координат об'єкту в способі-прототипі використовуються одночасно всі незалежні просторові похідні вектора магнітної індукції. Таким чином вихід з ладу (відмова, втрата працездатності, зміна робочої точки чутливого елемента) навіть одного градієнтометра призводить до неможливості визначити місце розташування об'єкта. В основу моделі поставлена задача - підвищити точність та надійність визначення місцезнаходження об'єкта. Поставлена задача вирішується тим, що в способі визначення місцезнаходження об'єкта об'єкт розташовують в магнітному полі; вибирають місце розташування точок спостереження в площині, яка не має точок перетину з об'єктом; реєструють значення величин вектора магнітної індукції і його просторових похідних першого і другого порядку в кожній вибраній точці; згідно з корисною моделлю, в кожній точці спостереження розташовують одноканальний аксіальний градієнтометр першого порядку; напрямок вісі градієнтометра збігається з напрямком нормалі до площини вимірювань; за отриманими значеннями перших і других просторових похідних вектора магнітної індукції виділяють точки спостереження, які найбільш віддалені від об'єкта, і визначають напрямок з кожної виділеної точки на об'єкт, а потім за значеннями вектора магнітної індукції визначають відстань від кожної виділеної точки до об'єкта, після чого по отриманим результатам визначають місцезнаходження об'єкта в просторі. Реєстрація магнітного поля одноканальним аксіальним градієнтометром першого порядку в площині вимірювань дозволяє визначити значення вихідного сигналу градієнтометра в заданих точках зазначеній площині, наприклад в N N вузлах прямокутної рівномірної плоскою решітки з заданим кроком. Ця операція реалізується за допомогою проведення двовимірної інтерполяції і гладкого заповнення даних (Примин М.А., Недайвода И.В. Алгоритм интерполяции магнитометрических данных при исследовании магнитного поля сердца человека, УСиМ, 2006, № 3, стр. 22-31). За отриманими значеннями у кожному із зазначених вузлів прямокутної рівномірної решітки визначають значення вектора магнітного індукції і його перших і просторових похідних. А саме: (1) в хвильової площини (kх, kу, 0) виділяють N N вузлів прямокутної рівномірної плоскої решітки з заданим кроком; (2) реалізують пряме подвійне просторове перетворення Фур'є - в кожному із зазначених вузлів хвильової площини визначають значення Фур'є-образу вихідного сигналу градієнтометра F[] ; (3) за значеннями Фур'є-образу вихідного сигналу градієнтометра і відомої (заданої) конструкції трансформатора магнітного потоку градієнтометра визначають значення фур'єобразу z-ой складової вектора магнітної індукції: F[Bz] F[] (1 exp(Lk )) (2а) F[Bz] F[] (1 2 exp(2Lk ) exp(2 Lk )) , (2б) (4) за отриманими значеннями визначають значення фур'є-образів складових вектора магнітної індукції і його перших просторових похідних F[Bx] ikx F[Bz] k , F[By] iky F[Bz] k , F[Bx y ] kx ky F[Bz] k , F[By y ] ky ky F[Bz] k , F[Bz x ] ikx F[Bz], F[Bz y ] iky F[Bz], (2в) F[Bz z] k F[Bz] 50 55 (5) реалізують обернене подвійне просторове перетворення Фур'є - в кожному із зазначених вузлів і в площині вимірювань визначають значення вектора магнітної індукції і його перших просторових похідних. Для того, щоб оцінити похибки реєстрації перших просторових похідних вектора магнітної індукції розглянемо наступну модельну задачу. Припустимо, що об'єкт має сферичну форму, радіусом 50 м і розташований на відстані (глибині) 100 м від площини вимірювань. Просторова конфігурація об'єкта у вигляді схеми показана на фіг. 2. Об'єкт розташований в магнітному полі 3 UA 119752 U 5 10 15 20 Землі, вектор магнітної індукції якого спрямований уздовж осі OZ - нормалі до площини вимірювань. Область спостереження має розмір 1000 м по двох взаємно ортогональних напрямках. Така просторова конфігурація відповідає умовам пошуку намагнічених тіл у Землі. У кожній з 31×31 точок спостереження (вузлів рівномірної прямокутної решітки) обчислювалося значення вихідного сигналу градієнтометра з наступними значеннями конструктивних параметрів - радіус прийомних котушок 25 мм, "база" градієнтометра 35 мм. Отримані значення вихідного сигналу градієнтометра першого і другого порядку показані у вигляді магнітної карти в режимі заповнення кольором проміжків між ізолініями сигналу на фіг. 2. За значеннями вихідного сигналу градієнтометра була реалізована процедура визначення значень вектора магнітної індукції і його перших просторових похідних в точках спостереження. Просторовий розподіл перших просторових похідних вектора магнітної індукції у вигляді магнітних карт показано на фіг. 2 для градієнтометрів першого і другого порядку. Таким чином наведений модельний приклад показує, що пропонований спосіб дозволяє визначити значення вектора магнітної індукції і його перших просторових похідних для довільного об'єкта із заданим рівнем точності (в даному прикладі сумарне значення похибки визначення параметрів магнітного поля не перевищує 2 %). Отримані значення перших просторових похідних вектора магнітної індукції використовуються для виділення точок площини вимірювання, які найбільш віддалені від об'єкта. Для цього в кожній точці спостереження визначають значення інтенсивності просторового градієнта магнітного поля: g (Bz x)2 (Bz y)2 . (3) 25 30 35 40 45 50 55 За отриманими значеннями визначають максимальне значення gmax інтенсивності просторового градієнта g у всіх точках спостереження. Після чого виділяють точки спостереження, де виконується умова g gmax A , де A - заданий рівень. Якщо A 1 виділяються усі точки спостереження, якщо A 0 - кількість виділених точок спостереження дорівнює нулю (не виділена жодна точка спостереження). Для того, щоб оцінити похибки виділення точок спостереження з допомогою описаного алгоритму розглянемо наступну модельну задачу. Припустимо, що джерелами магнітного поля є два магнітних диполі М1 і М2, які розташовані в точках простору з координатами (60, 60, 100) мм і (140, 140, 100) мм, відповідно. При цьому вектори магнітного моменту диполів взаємоортогональні і дорівнюють величинам (1, -1, 0) і (1, 1, 0), відповідно. Взаємне розташування в просторі і напрямок векторів магнітного моменту джерел магнітного поля показані на фіг. 3. Точками спостереження є 6×6 вузлів плоскої прямокутної решітки з кроком 40 мм по взаємно ортогональним напрямкам, яка розташована в площині z=0. У кожній точці спостереження обчислювалося значення вихідного сигналу одноканального аксіального градієнтометра першого порядку з наступними значеннями величин конструктивних параметрів: радіус прийомних котушок дорівнює 10 мм, "база" градієнтометра дорівнює 52 мм. Розташування точок спостереження і проекції прийомних котушок на площину вимірювань також показані на фіг. 3. Така просторова конфігурація відповідає умовам проведення магнітокардіографічних досліджень, де об'єктом є, наприклад, струми потоків, що виникають в процесі поляризації / реполяризації шлуночкової системи серця. У кожній з 36 точок спостереження обчислювалося значення вихідного сигналу градієнтометра у припущенні, що джерелом магнітного поля є тільки магнітний диполь М 1, тільки магнітний диполь М2 і одночасно обидва магнітні диполі. Розподіли вихідного сигналу градієнтометра показані на фіг. 3 у вигляді магнітних карт в режимі заповнення кольором проміжків між ізолініями сигналу. За отриманими значеннями в кожній з 36 точок спостереження обчислювалося значення інтенсивності градієнта магнітного поля g . Просторовий розподіл інтенсивності просторового градієнта магнітного поля показано у вигляді магнітної карти на фіг. 3. Там же наведено розташування точок площині спостереження, де розподіл параметра g має локальний (і глобальний максимум). Для кожної точки глобального максимуму вказані відносні значення в процентах просторового градієнта магнітного поля (в даному прикладі таких точок дві і значення становлять 100 і 99 %, відповідно). З отриманих результатів випливає, що кількість точок глобального максимуму інтенсивності градієнта магнітного поля і їх розташування в просторі відповідають кількості і розташуванню джерел магнітного поля. За розподілом g виділені точки спостереження, які найбільш віддалені від об'єкта. Як приклад, на фіг. 3 показані точки спостереження, де виконується умова g gmax 0.75 ( A 0.75) . 4 UA 119752 U 5 10 15 20 25 30 35 40 45 50 55 60 Таким чином наведений модельний приклад показує, що пропонований спосіб дозволяє використовувати значення перших просторових похідних вектора магнітної індукції для виділення точок спостереження, які найбільш віддалені від об'єкта, при довільному розташуванні точок спостереження і об'єкта, при довільній кількості джерел магнітного поля з заданим рівнем точності. Систематична похибка визначення місцезнаходження об'єкта для всіх точок спостереження ( A 1) в даному прикладі становить 2 %. Систематична похибка визначення місцезнаходження об'єкта по виділеним точкам спостереження ( A 0.75) в даному прикладі становить 0.8 %. Таким чином застосування операції виділення точок спостереження, які найбільш віддалені від об'єкта у межах площині вимірювань, дозволяє підвищити точність визначення місцезнаходження об'єкта. Отримані значення перших просторових похідних вектора магнітної індукції використовуються для визначення напрямку на об'єкт. Реалізація зазначеної процедури заснована на методі власних векторів (Гуменюк-Сычевский В.И. Примин М.А., Недайвода И.В., Математическая модель и алгоритмы измерений в задаче локализации дипольного источника, "Электронное моделирование", 1992, т. 14, № 5, стор. 78-84). А саме: у немагнітному, непровідному, однорідному середовищі (у повітрі) виконуються однорідні рівняння Максвелла (1); тому тензор перших просторових похідних вектора магнітної індукції (2) симетричний і його слід дорівнює нулю; власні значення зазначеного тензору дійсні та відмінні; нормовані власні вектори зазначеного тензору утворюють ортогональний базис; в "новій" системі координат значення напрямних косинусів дипольного джерела визначаються за допомогою аналітичних (алгебраїчних) співвідношень; після чого за допомогою алгебраїчних співвідношень переходу обчислюють значення напрямку на об'єкт у заданій (лабораторній) системі координат. У зазначеному вище джерелі літератури в явному виді наведена схема перетворення даних, співвідношення для обчислень, а також отримані оцінки виникаючих похибок. Оскільки використовуються точні (аналітичні) співвідношення, то при прямих вимірюваннях просторових похідних вектора магнітної індукції похибка прагне до нуля (отримані точні значення напрямних косинусів), в інших випадках похибка визначається тільки похибками вхідних даних (у розглянутому нами вище модельному прикладі - не більше 1.5 %). За виміряними значеннями вектора магнітної індукції В і напрямком на точку розташування об'єкта обчислюють - по аналітичним (алгебраїчним) співвідношенням - значення відстані до об'єкта, що й дає повне вирішення поставленого технічного завдання. Принципова схема пристрою, який реалізує запропонований спосіб для визначення місцезнаходження об'єкта при проведенні магнітокардіографічних досліджень показана на фіг. 4. Як приклад розглянемо результати чисельного моделювання реалізації запропонованого способу для визначення місцезнаходження об'єкта при пошуку намагнічених тіл під землею. Припустимо, що об'єкт - котушка зі струмом, яка розташована на поверхні Землі. Амплітуда 2 вектора магнітного моменту об'єкта складає 1 Ам , а його напрямок збігається з напрямком вектора магнітної індукції геомагнітного поля. При цьому СКВІД градієнтометр також розташований на поверхні Землі на заданій відстані від об'єкта (1, 2, 3, 4 чи 5 метрів, відповідно). Результати обчислень вихідного сигналу аксіального СКВІД градієнтометра для заданих значень конструктивних параметрів трансформатора магнітного потоку (бази градієнтометра та діаметра витків трансформатора) наведені в Таблицях 1 та 2 для градієнтометрів першого та другого порядків, відповідно. Значення вихідного сигналу -12 градіометрів наведені у відліках АЦП таким чином, що 1000 відліків відповідають 1 пТ(10 Т). Припустимо далі, що об'єкт має форму прямокутної призми з розмірами 0,2×5×2 метри і розташований в магнітному полі Землі, вектор магнітної індукції якого спрямований уздовж осі OZ лабораторної системи координат. Об'єкт має феромагнітні властивості - вектор магнітного 2 моменту об'єкта має амплітуду 300 Ам , а його напрямок збігається з напрямком вектора магнітної індукції геомагнітного поля. Об'єкт розташований під поверхнею Землі, а СКВІД градієнтометр розташований на поверхні Землі на заданій відстані від об'єкта (1, 2, 3, 4, 5, 7, 9 чи 11 метрів, відповідно). Результати обчислень вихідного сигналу аксіального СКВІД градієнтометра для заданих значень конструктивних параметрів трансформатора магнітного потоку (бази градієнтометра та діаметра витків трансформатора) наведені в Таблицях 3 та 4 для градієнтометрів першого та другого порядків, відповідно. Порівняємо отримані результати чисельного моделювання у припущенні, що "котушка зі струмом" є джерелом магнітної завади відносно магнітного сигналу об'єкта у вигляді призми 0.2×5×2 метри. Наприклад, для конструкції трансформатора магнітного потоку з витками діаметром 30 мм і базою 60 мм значення магнітного сигналу становлять 57,6 та 33,7 пТ, а 5 UA 119752 U 5 10 15 20 25 30 35 значення магнітної завади становлять 3,8 та 3,6 пТ для градієнтометрів першого та другого порядку, відповідно. Тобто, використання СКВІД градієнтометра дозволяє виміряти сигнал від об'єкта, який розташований у Землі, на тлі сигналу від об'єкта, який розташований на поверхні Землі. При цьому співвідношення "сигнал-завада" становить не менш, ніж 10:1. Крім того використання аксіального СКВІД градієнтометра першого порядку дозволяє підвищити рівень сигналу від об'єкта у порівнянні з аксіальним СКВІД градієнтометром другого порядку при тому ж рівні значень сигналу від магнітної завади. Припустимо далі, що об'єкт розташований в магнітному полі Землі, вектор магнітної індукції якого спрямований уздовж осі OZ лабораторної системи координат. Об'єкт має феромагнітні властивості - напрямок вектора магнітного моменту об'єкта збігається з напрямком вектора магнітної індукції геомагнітного поля, а його амплітуда визначається як геомагнітним полем, так і властивостями об'єкта (розмірами, матеріалом і т. і.). Чисельне моделювання було проведено у припущенні, що джерелом магнітного сигналу є одночасно сім (7) незалежних об'єктів, які розподілені в просторі. Значення просторових параметрів об'єктів, які були використані при чисельному моделюванні, в текстовому вигляді наведені в Таблиці 5. Кількість об'єктів, схема їх розташування у просторі, та значення величин амплітуд векторів магнітного моменту були задані у відповідності з описом тестового полігону фірми Supracon, Німеччина (М. Schneider, R. Stolz, S. Linzen, M. Schiffler, A. Chwala, M. Schulz, S. Dunkel, H.-G. Meyer. Inversion of geo-magnetfc full-tensor gradiometer data, Journal of Applied Geophysics 92 (2013) 57-67). Припустимо, що магнітне поле реєструють одноканальним аксіальним СКВІД градієнтометром першого порядку з наступними значеннями конструктивних параметрів: радіус прийомних котушок 15 мм, "база" градієнтометра 30 мм. При цьому градієнтометр розташовують послідовно в кожному з 31×31 вузлів прямокутної плоскої решітки з кроком 0,33 м. Для кожного з 961 вузлів (незалежних положень градієнтометра) обчислимо значення вихідного сигналу градієнтометра. Після чого за отриманими значеннями в кожному з 961 вузлів обчислимо значення вектора магнітної індукції і його перших просторових похідних. На наступному кроці виділимо точки спостереження, які найбільш віддалені від об'єкта. Потім в виділених точках визначимо напрямок на об'єкт і відстань до об'єкта. Обчислимо і відобразимо просторову конфігурацію джерела магнітного поля у вигляді квазітривимірного відображення. Отримані результати наведені у графічному вигляді на фіг. 5 та у текстовому вигляді у таблиці 5. Таким чином застосування запропонованого способу дозволяє підвищити точність визначення місцезнаходження об'єкта: в наведених результатах чисельного моделювання середнє значення похибки становить не більше 5 %. При цьому застосування запропонованого способу дозволяє отримати інформацію про кількість об'єктів, які одночасно є джерелами магнітного поля, формі об'єкта і про його розміри. Таблиця 1 діаметр витків трансформатора магнітного потоку 20 мм 2 L=1 м L=2 м L=3 м L=4 м L=5 м котушка зі струмом, 1 Ам , база 40 мм 2 котушка зі струмом, 1 Ам , база 50 мм 2 котушка зі струмом, 1 Ам , база 60 мм 2 котушка зі струмом, 1 Ам , база 70 мм 1270 1506 1654 1738 діаметр витків трансформатора магнітного потоку 30 мм L=1 м L=2 м L=3 м L=4 м L=5 м 2 24 35 48 60 2 4 6 7 0 1 1 2 0 0 0 0 котушка зі струмом, 1 Ам , база 40 мм 2 котушка зі струмом, 1 Ам , база 50 мм 2 котушка зі струмом, 1 Ам , база 60 мм 2 котушка зі струмом, 1 Ам , база 70 мм 3011 3535 3858 4041 діаметр витків трансформатора магнітного потоку 40 мм L=1 м L=2 м L=3 м L=4 м L=5 м 40 6 54 80 109 137 6 9 13 17 1 2 3 4 0 0 1 1 UA 119752 U Продовження таблиці 1 2 котушка зі струмом, 1 Ам , база 40 мм 2 котушка зі струмом, 1 Ам , база 50 мм 2 котушка зі струмом, 1 Ам , база 60 мм 2 котушка зі струмом, 1 Ам , база 70 мм 5741 6657 7209 7515 99 146 196 248 11 17 24 32 2 4 5 7 0 1 1 2 Таблиця 2 діаметр витків трансформатора магнітного потоку 20 мм 2 L=1 м L=2 м L=3 м L=4 м L=5 м котушка зі струмом, 1 Ам , база 40 мм 2 котушка зі струмом, 1 Ам , база 50 мм 2 котушка зі струмом, 1 Ам , база 60 мм 2 котушка зі струмом, 1 Ам , база 70 мм 760 1213 1530 1730 діаметр витків трансформатора магнітного потоку 30 мм L=1 м L=2 м L=3 м L=4 м L=5 м 2 24 24 27 29 4 5 6 7 1 1 2 2 0 0 0 0 котушка зі струмом, 1 Ам , база 40 мм 2 котушка зі струмом, 1 Ам , база 50 мм 2 котушка зі струмом, 1 Ам , база 60 мм 2 котушка зі струмом, 1 Ам , база 70 мм 1889 2904 3601 4037 діаметр витків трансформатора магнітного потоку 40 мм L=1 м L=2 м L=3 м L=4 м L=5 м 2 котушка зі струмом, 1 Ам , база 40 мм 2 котушка зі струмом, 1 Ам , база 50 мм 2 котушка зі струмом, 1 Ам , база 60 мм 2 котушка зі струмом, 1 Ам , база 70 мм 3819 5604 6804 7545 56 58 61 63 100 104 107 109 9 13 15 16 17 23 27 28 2 3 4 5 0 1 1 2 4 6 8 9 1 2 3 3 Таблиця 3 діаметр витків трансформатора магнітного потоку 20 мм Н=1 м Н=2 м Н=3 м Н=4 м Н=5 м Н=7 м Н=9 м Н=11 м 20188 5247 2605 1557 1028 537 324 214 23262 6311 3169 1904 1263 663 401 265 25906 7301 3704 2237 1489 785 476 315 28215 8221 4211 2557 1707 903 550 364 Н=1 м Н=2 м Н=3 м Н=4 м 44910 11781 5857 3502 2 об'єкт 0,2×5×2 м, 300 Ам , база 40 мм 2 об'єкт 0,2×5×2 м, 300 Ам , база 50 мм 2 об'єкт 0,2×5×2 м, 300 Ам , база 60 мм 2 об'єкт 0,2×5×2 м, 300 Ам , база 70 мм діаметр витків трансформатора магнітного потоку 30 мм Н=5 м Н=7 м Н=9 м Н=11 м 2 об'єкт 0,2×5×2 м, 300 Ам , база 40 мм 7 2314 1209 730 482 UA 119752 U Продовження таблиці 3 2 об'єкт 0,2×5×2 м, 300 Ам , база 50 мм 2 об'єкт 0,2×5×2 м, 300 Ам , база 60 мм 2 об'єкт 0,2×5×2 м, 300 Ам , база 70 мм діаметр витків трансформатора магнітного потоку 40 мм 51780 14175 7126 4283 2841 1491 903 597 57699 16397 8329 5033 3349 1766 1072 709 62867 18467 9467 5751 3841 2033 1237 820 Н=1 м Н=2 м Н=3 м Н=4 м 78592 20886 10402 6221 4112 2150 1299 857 90695 25132 12655 7610 5048 2651 1605 1061 101138 29075 14790 8941 5952 3139 1906 1261 110268 32749 16814 10218 6825 3613 2199 1458 Н=5 м Н=7 м Н=9 м Н=11 м 2 об'єкт 0,2×5×2 м, 300 Ам , база 40 мм 2 об'єкт 0,2×5×2 м, 300 Ам , база 50 мм 2 об'єкт 0,2×5×2 м, 300 Ам , база 60 мм 2 об'єкт 0,2×5×2 м, 300 Ам , база 70 мм Таблиця 4 діаметр витків трансформатора магнітного потоку 20 мм Н=1 м Н=2 м Н=3 м Н=4 м Н=5 м Н=7 м Н=9 м Н=11 м 10113 1413 517 250 139 56 27 15 12797 1982 749 368 207 84 41 23 15241 2581 1005 501 284 116 58 33 17465 3195 1277 644 369 153 77 44 Н=1 м Н=2 м Н=3 м Н=4 м 22360 3167 1162 563 314 125 62 35 28334 4444 1685 829 466 189 94 53 33779 5788 2258 1126 640 262 131 74 38746 7168 2869 1449 831 345 174 99 Н=1 м Н=2 м Н=3 м Н=4 м 2 об'єкт 0,2×5×2 м, 300 Ам , база 40 мм 2 об'єкт 0,2×5×2 м, 300 Ам , база 50 мм 2 об'єкт 0,2×5×2 м, 300 Ам , база 60 мм 2 об'єкт 0,2×5×2 м, 300 Ам , база 70 мм діаметр витків трансформатора магнітного потоку 30 мм Н=5 м Н=7 м Н=9 м Н=11 м 2 об'єкт 0,2×5×2 м, 300 Ам , база 40 мм 2 об'єкт 0,2×5×2 м, 300 Ам , база 50 мм 2 об'єкт 0,2×5×2 м, 300 Ам , база 60 мм 2 об'єкт 0,2×5×2 м, 300 Ам , база 70 мм діаметр витків трансформатора магнітного потоку 40 мм 8 Н=5 м Н=7 м Н=9 м Н=11 м UA 119752 U Продовження таблиці 4 2 об'єкт 0,2×5×2 м, 300 Ам , база 40 мм 2 об'єкт 0,2×5×2 м, 300 Ам , база 50 мм 2 об'єкт 0,2×5×2 м, 300 Ам , база 60 мм 2 об'єкт 0,2×5×2 м, 300 Ам , база 70 мм 38801 5600 2061 999 557 223 110 62 49256 7861 2989 1472 829 336 167 94 58813 10242 4007 2000 1137 467 234 133 67542 12688 5092 2574 1476 613 309 176 Таблиця 5 № #1 #2 #3 #4 #5 #6 #7 5 10 15 X, м задані 2,62 -2,00 -2,45 -6,25 -0,13 -5,25 1,12 Y, м отримані 2,79 -2,23 -2,55 -6,23 -0,18 -5,25 1,35 задані -5,62 -3,24 -4,00 -1,74 0,75 2,25 4,00 Z, м отримані -5,26 -3,65 -3,82 -1,51 0,40 2,46 4,09 задані 0,70 2,00 2,00 0,90 0,70 0,90 1,5 отримані 0,60 1,82 2,13 0,86 0,65 0,87 1,31 ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб визначення місцезнаходження об'єкта, заснований на тому, що об'єкт розташовують у магнітному полі; вибирають місцезнаходження точок спостереження в площині, яка не має точок перетину з об'єктом; реєструють значення вектора магнітної індукції та його просторових похідних першого та другого порядку в кожній з вибраних точок, який відрізняється тим, що в кожній точці спостереження розташовують одноканальний аксіальний градієнтометр першого порядку; напрямок осі градієнтометра співпадає з напрямком нормалі до площини вимірювань; за отриманими значеннями перших і других просторових похідних вектора магнітної індукції виділяють точки спостереження, які найбільш віддалені від об'єкта, і визначають напрямок з кожної виділеної точки на об'єкт, а потім за значеннями вектора магнітної індукції визначають відстань від кожної виділеної точки до об'єкта; після чого за отриманими результатами визначають місце розташування об'єкта в просторі. 9 UA 119752 U 10 UA 119752 U 11 UA 119752 U Комп’ютерна верстка О. Гергіль Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 12
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01R 33/00, A62B 33/00
Мітки: визначення, спосіб, місцезнаходження, об'єкта
Код посилання
<a href="https://ua.patents.su/14-119752-sposib-viznachennya-misceznakhodzhennya-obehkta.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення місцезнаходження об’єкта</a>
Спосіб визначення місцезнаходження об’єкта
Номер патенту: 116119
Опубліковано: 10.05.2017
Автори: Недайвода Ігор Володимирович, Прімін Михайло Андрійович
МПК: A62B 33/00, G01R 33/00
Мітки: місцезнаходження, визначення, об'єкта, спосіб
Формула / Реферат:
Спосіб визначення місцезнаходження об'єкта заснований на тім, що об'єкт розташовують у магнітному полі; вибирають місцезнаходження точок спостереження в площині, яка не має точок перетину з об'єктом; реєструють значення вектора магнітної індукції та його просторових похідних першого та другого порядку в кожній з вибраних точок, який відрізняється тим, що в кожній точці спостереження розташовують одноканальний аксіальний градієнтометр другого...
Спосіб визначення місцезнаходження об’єкта
Номер патенту: 96206
Опубліковано: 26.01.2015
Автори: Недайвода Ігор Володимирович, Прімін Михайло Андрійович
МПК: G01R 33/00
Мітки: об'єкта, визначення, місцезнаходження, спосіб
Формула / Реферат:
Спосіб визначення місцезнаходження об'єкта, який засновано на тому, що джерела магнітного поля у вигляді витків зі струмом мають рівну площу й не перетинаються; зазначені джерела магнітного поля розташовують у кожній із чотирьох різних точок об'єкта таким чином, що зазначені точки розташовані на двох взаємноортогональних прямих, на фіксованій відстані від точки перетинання зазначених прямих і симетрично щодо зазначеної точки перетинання;...
Спосіб визначення місцезнаходження об’єкта
Номер патенту: 111005
Опубліковано: 10.03.2016
Автори: Прімін Михайло Андрійович, Недайвода Ігор Володимирович
МПК: E21F 11/00, G01R 33/00, A62B 33/00
Мітки: спосіб, визначення, місцезнаходження, об'єкта
Формула / Реферат:
Спосіб визначення місцезнаходження об'єкта, оснований на тому, що джерела магнітного поля у вигляді витків зі струмом мають рівну площу й не перетинаються; зазначені джерела магнітного поля розташовують у кожній із чотирьох різних точок об'єкта таким чином, що зазначені точки розташовані на двох взаємно ортогональних прямих, на фіксованій відстані від точки перетинання зазначених прямих і симетрично щодо зазначеної точки перетинання;...
Спосіб визначення положення або місцезнаходження компонентів в установках для видобутку корисних копалин і гірничодобувна установка
Номер патенту: 104473
Опубліковано: 10.02.2014
Автори: Вассельманн Йоханнес, Моррісон Кемпбелл, Алер Марко
МПК: F25D 23/06
Мітки: корисних, гірничодобувна, компонентів, установка, визначення, установках, місцезнаходження, положення, спосіб, видобутку, копалин
Формула / Реферат:
1. Спосіб визначення положення і/або місцезнаходження компонентів установки для видобутку корисних копалин, зокрема вугледобувної установки, яка містить як компоненти установки щонайменше один забійний конвеєр (2) для переміщення видобутого матеріалу, одне захисне кріплення (13) для підтримки забою (1) відкритим, рушійні пристрої (14) для просування забійного конвеєра (2) і захисного кріплення (13) під час активної роботи, виїмкову машину...
Спосіб визначення місцезнаходження витоку рідкого або газового середовищ у виробах
Номер патенту: 38524
Опубліковано: 12.01.2009
Автор: НАЦІОНАЛЬНИЙ АВІАЦІЙНИЙ УНІВЕРСИТЕТ (НАУ)
МПК: G01M 3/00, G01N 29/00, F17D 5/02
Мітки: спосіб, витоку, середовищ, місцезнаходження, визначення, рідкого, виробах, газового
Формула / Реферат:
Спосіб визначення місцезнаходження витоку рідкого або газового середовищ у виробах, що включає встановлення на об'єкті контролю двох датчиків, реєстрацію сигналів акустичної емісії з одночасним вимірюванням положення в часі енергетичного центра ваги пікового сигналу у взаємній кореляційній функції, за яким визначають місцезнаходження витоку рідкого або газового середовищ у виробах, який відрізняється тим, що спочатку проводять інверсію...
Попередній патент: Спосіб виготовлення профільних отворів на верстатах токарної групи шляхом ротаційного видавлювання
Наступний патент: Спосіб оцінювання змін гомеостазу іонів у пробах цервікального слизу за дії ендо- і екзогенних чинників
Випадковий патент: Спосіб очищення води та апарат для його здійснення