Радіолокатор з пристроєм компенсації завад
Номер патенту: 32193
Опубліковано: 15.12.2000
Автори: Пророшин Сергій Михайлович, Бахвалов Валентин Борисович, Кудрик Андрій Миколайович
Текст
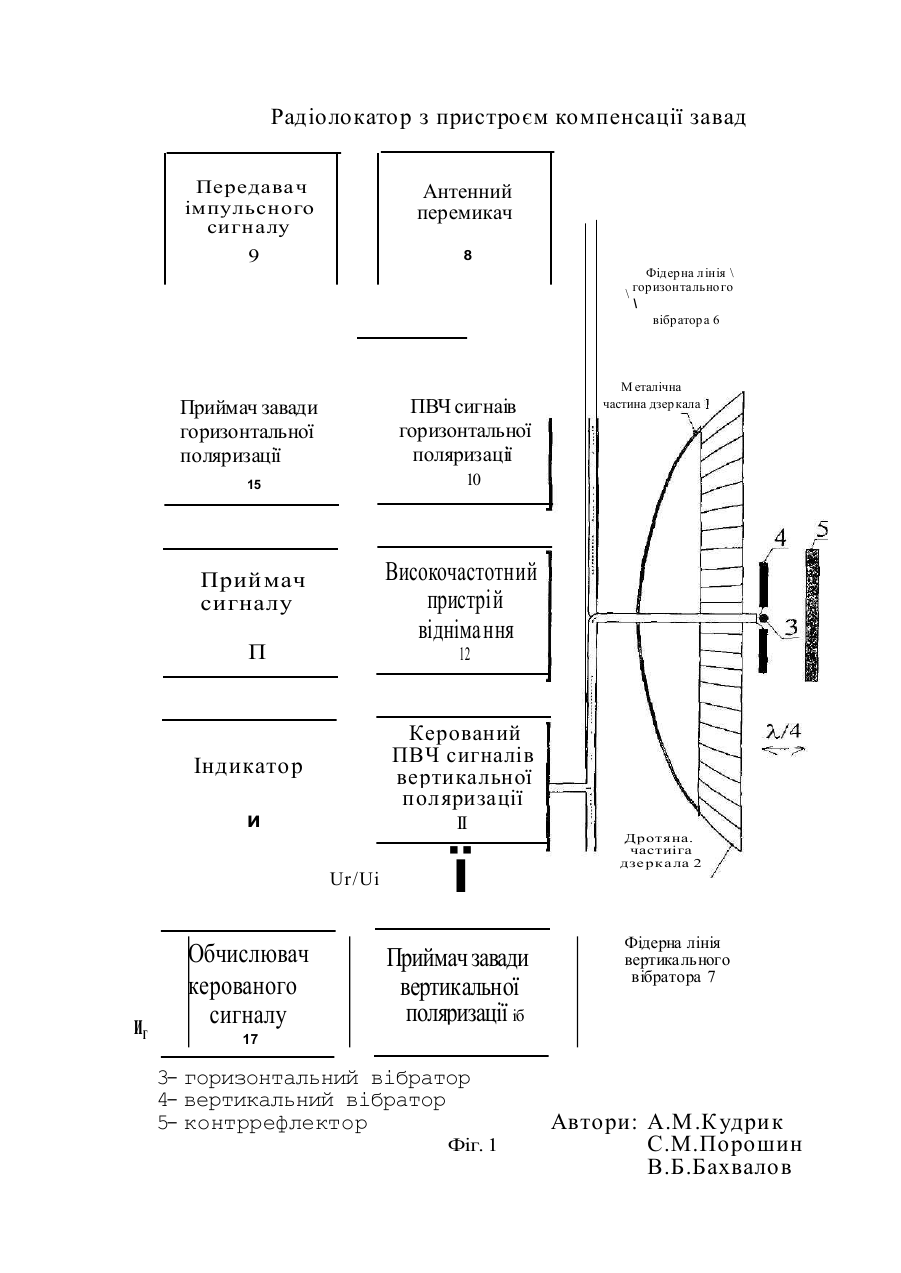
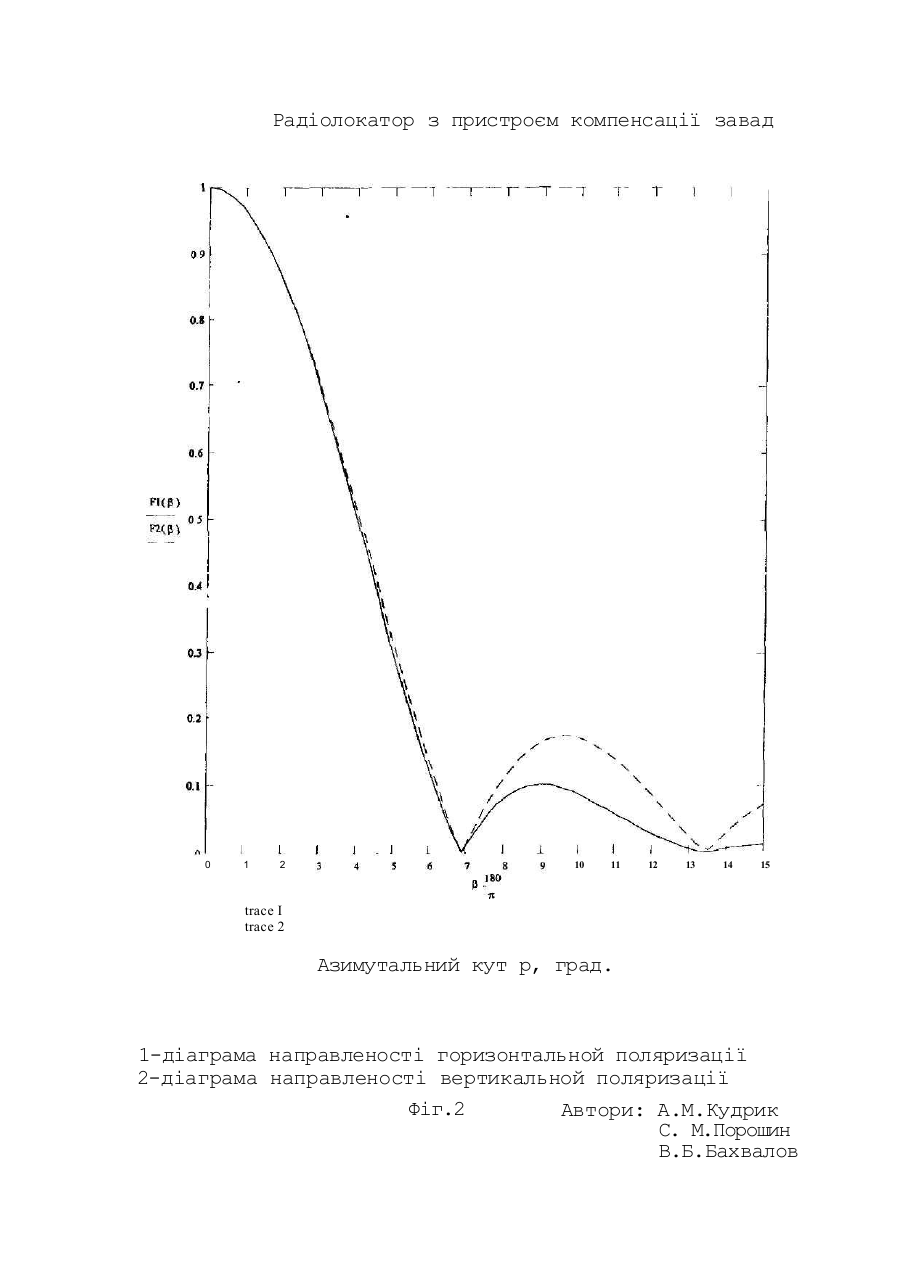
ч МІЖ6 GO IS 7/36 Радіолокатор з пристроєм компенсації завад Винахід належить до області радіолокації і може бути використаний в радіолокаторах мікрохвильового діапазону для захисту від прицільних завад лінійної поляризації, що містять як горизонтальну, так і вертикальну складові поля радіохвиль. Відомий компенсатор радіозавад з кореляційним зворотним зв'язком. Аналог містить два канали прийому, загальний суматор і пристрій обчислення кореляційного моменту із зворотним зв'язком. Завада додаткового компенсаційного каналу використовується в аналозі для подавления завади в основному каналі прийому шляхом протифазного складання в загальному суматорі [І]. Недоліком цього аналогу є те, що він може разом із завадою подавляти також корисний сигнал у випадках, коли завада і сигнал не мають значних часових відмінностей. Аналог може ефективно працювати тільки у випадках, коли завада протяжна, а корисний сигнал у вигляді коротких радіоімпульсів, і не може - за відсутністю таких часових відмінностей. У якості прототипу вибрана РЛС з пристроєм компенсації завад відніманням. Принцип компенсації, що використовувався в прототипі, полягає в тому, що від сукупності завади і корисного сигналу віднімається завада, яку приймають по додатковому каналу, а віднімання здійснюють на відеочастоті. До складу прототипу входять наступні основні елементи: передавач імпульсного сигналу на несучій частоті мікрохвильового діапазону; приймально-передавальна антена основного каналу з антенним перемикачем "прийом-передача" ; ' приймальна антена компенсаційного каналу; два однакові супергетеродинні приймачі з загальним гетеродином (один в основному каналі прийому та інший приймач в компенсаційному каналі прийому); обмежувач завади знизу в компенсаційному каналі; пристрій віднімання вихідних напруг основного і компенсаційного каналів на відеочастоті; індикатор прийнятого сигналу, пов'язаний з виходом пристрою віднімання. Обидва приймачі прототипу являють собою однакові супергетеродинні приймачі із загальним гетеродином і широким динамічним діапазоном. Кожний з приймачів містить змішувач, логарифмічний підсилювач проміжної частоти і детектор. Приймально-передавальна антена основного каналу прототипу має вузьку діаграму спрямування, а приймальна антена компенсаційного каналу має широку діаграму спрямування, що охоплює бокові пелюстки основної антени. Коли завада приймається по бокових пелюстках діаграми спрямування антени основного каналу, рівень завади в компенсаційному каналі відповідає максимальному рівню бокових пелюсток. Після віднімання завад на відеочастоті завада на виході пристрою віднімання буде значно послаблена, а корисний луна-сигнал буде виділений і надійде на вхід індикатора. Обмежувач знизу (або пороговий пристрій) виключає віднімання корисних луна-сигналів у випадку, коли завади не буде [2]. . Недоліком прототипу є те, що він не забезпечує завадозахист у випадку, коли завада приходить по головній пелюстці діаграми спрямування основної антени. У цьому випадку завада в основному каналі виявиться значно більше, ніж в компенсаційному каналі, і пройде на вихід пристрою віднімання. Інший недолік прототипу полягає в тому, що в загальному випадку рівень завад в основному і компенсаційному каналах буде відрізнятися через відмінність за формою діаграми спрямованості компенсаційної антени від з форми бокових пелюсток антени основного каналу, а це часто призводить до подавлення корисного луна-сигналу разом із завадою і зриває виявлення цілі. В основу винаходу поставлена задача радіолокатора з пристроєм компенсації завад, в якому за рахунок використання вертикальної складової поля завади для подавлення горизонтальної складової цієї завади при горизонтально поляризованому зондуючому сигналі, застосування двоканального вимірювача відношення амплітуд складових завади і використання результату вимірювання для вирівнювання амплітуд лінійно поляризованих завад. За допомогою керованого підсилювача високої частоти, а також віднімання вирівняних завад на високій частоті в основному каналі прийому після цього підсилювача забезпечується подавлення завади, що покращує завадозахищеність радіолокатора навіть при відсутності просторових і часових відмінностей завади і сигналу. Поставлена задача вирішується тим, що в радіолокаторі з пристроєм компенсації завад, що містить передавач імпульсного сигналу, приймальнопередавальну антенну систему з антенним перемикачем, приймачі, пристрій віднімання і індикатор, згідно з винаходом антенна система виконана у вигляді дзеркальної параболічної антени з вібраторним опромінювачем; дзеркало антени виконано у вигляді параболоїда обертання, який складається з двох частин: суцільної металевої частини і кільцевої дротяної частини з проводів у вигляді однакових дуг парабол, розташованих одна від одної на відстані менш половини довжини хвилі; вібраторний опромінювач антени виконаний з двох взаємно перпендикулярних однакових симетричних вібраторів, позаду яких розміщений плоский металевий контррефлектор; горизонтальний приймально-передавальний вібратор опромінювача пов'язаний фідерною лінією з антенним перемикачем, вхід якого пов'язаний з передавачем, а вихід - з підсилювачем високої частоти сигналів горизонтальної поляризації і з приймачем завади горизонтальної поляризації; вертикальний приймальний вібратор опромінювача пов'язаний фідерною лінією з приймачем завади вертикальної поляризації і з керованим підсилювачем високої частоти сигналів вертикальної поляризації; виходи підсилювачів високої частоти пов'язані з високочастотним пристроєм віднімання, на виході якого встановлений приймач сигналу, зв'язаний з індикатором; на виходах приймачів завад горизонтальної і вертикальної поляризації встановлений обчислювач керуючого сигналу, який дорівнює відношенню амплітуд завад горизонтальної і вертикальної поляризації або одиниці у випадку, коли рівень завад менше заданого порогу, а вихід обчислювача пов'язаний зі входом управління керованого підсилювача високої частоти сигналів вертикальної поляризації. При цьому коефіцієнт підсилення керованого підсилювача високої частоти сигналів вертикальної поляризації пропорційний керуючому сигналу з обчислювача, а коефіцієнт підсилення підсилювача високої частоти сигналів горизонтальної поляризації постійний і дорівнює коефіцієнту підсилення керуючого підсилювача при керуючому сигналі, що дорівнює одиниці. Приймачі завад горизонтальної і вертикальної поляризації ідентичні і мають однакові коефіцієнти підсилення. Довжина фідерних ліній горизонтального і вертикального вібраторів встановлена таким чином, щоб фази горизонтально і вертикально поляризованих складових лінійно поляризованої завади були однакові на входах пристрою віднімання. Запропонована конструкція антенної системи забезпечує ідентичність діаграм спрямування дзеркальної антени на горизонтальній і вертикальній поляризації, що необхідно для усунення можливої появи зсуву фаз горизонтальної і вертикально поляризованих складових завади при прийманні завади по боковим пелюсткам діаграми спрямування антени. s Технічна сутність і принцип дії запропонованого пристрою пояснюються фігі ,2. На фіг. 1 подана спрощена структурна схема запропонованого радіолокатора і показаний ескіз його антенної системи. На фіг.2 представлені розрахункові нормовані діаграми спрямування запропонованої дзеркальної антени для горизонтальної і вертикальної поляризації. До складу запропонованого пристрою на фіг. 1 входять такі основні елементи: параболічне дзеркало антени у формі параболоїда обертання, яке складається з металевої частини дзеркала І і дротяної частини дзеркала 2 у вигляді кільцевої зони з проводів у вигляді однакових дуг парабол, розташованих одна від одної на відстані менш половини довжини хвилі; горизонтальний симетричний вібратор 3 опромінювача антени; вертикальний симетричний вібратор 4 опромінювача антени; контррефлектор 5 опромінювача антени у вигляді плоского металевого диску, встановленого позаду вібраторів у фокусі параболічного дзеркала на відстані в чверть довжини хвилі ХУ4 від вібраторів; фідерна лінія 6 горизонтального вібратора (коаксіальна або двопровідна екранована лінія); фідерна лінія 7 вертикального вібратора (коаксиальна або двопровідня екранована лінія); антенний перемикач 8 для переключення горизонтального вібратора опромінювача антени з прийому на передачу; передавач імпульсного сигналу 9 у вигляді зондуючих радіоімпульсів па несучій частоті мікрохвильового діапазону; підсилювач високої частоти сигналів горизонтальної поляризації 10, вхід якого пов'язаний з виходом антенного перемикача 8; керований підсилювач високої частоти сигналів вертикальної поляризації 11, основний вхід якого пов'язаний з вертикальним приймальним вібратором 3 опромінювача антени; 6 високочастотний пристрій віднімання 12 сигналів з виходів підсилювачів високої частоти 10, 11; приймач сигналу ІЗ , вхід якого пов'язаний з виходом високочастотного пристрою віднімання 12; індикатор 14 імпульсних луна-сигналів цілі; приймач завади горизонтальної поляризації 15, вхід якого пов'язаний з виходом антенного перемикача 8; приймач завади вертикальної поляризації 16, вхід якого пов'язаний з вертикальним вібратором 4 опромінювана антени; обчислювач керуючого сигналу 17, який дорівнює відношенню амплітуд завад горизонтальної і вертикальної поляризації r Aj або одиниці у виладку, коли рівень завад на виходах приймачів 15, 16 менше заданого порогу. Керуючий сигнал з виходу обчислювача 17 надходить на вхід управління підсилювача високої частоти 11 і змінює коефіцієнт підсилення цього підсилювача, що забезпечує вирівнювання амплітуд завад вертикальної і горизонтальної поляризації на входах високочастотного пристрою віднімання 12. Приймачі завад 15, 16 з обчислювачем 17 утворять вимірювач відношення амплітуд горизонтальної і вертикальної складових поля лінійно поляризованої завади. Такий вимір необхідно для вирівнювання амплітуд завад на входах пристрою віднімання 12 за допомогою керованого підсилювача високої частоти 11. Принцип дії запропонованого пристрою пояснюється наступним. Для подавления лінійно поляризованої прицільної завади на несучій частоті радіолокатора в запропонованому пристрої використовуються поляризаційні відмінності завади і луна-сигналу цілі. Випромінюється зондуючий сигнал горизонтальної поляризації і луна-сигнал цілі також має в основному горизонтальну поляризацію. Припускається, що завада має лінійну поляризацію і містить як горизонтальну, так і вертикальну складові поля. Фази цих складових однакові, а амплітуди можуть відрізнятися, але не дуже сильно. Запропонований пристрій призначений для боротьби саме з такою завадою, що може приходити як по головній пелюстці, так і по бокових пелюстках діаграми спрямування антени. Завада може бути протяжною або імпульсною, а відмінності тривалості імпульсу завади від тривалості зондуючого імпульсу не обов'язкові для забезпечення працездатності запропонованого пристрою. Горизонтальний вібратор опромінювача антени приймає луна-сигнал цілі і горизонтальну складову завади, а вертикальний вібратор опромінювача приймає вертикальну складову завади і майже не приймає луна-сигнал цілі. Для боротьби із завадою пропонується використати вертикальну складову завади для подавления горизонтальної складової завади шляхом їхнього віднімання на високій частоті в каналі прийому. Для реалізації цієї пропозиції необхідно забезпечити збіг фаз і рівність амплітуд завад на входах високочастотного пристрою віднімання 12. Рівність амплітуд вертикальної і горизонтальної складових завади забезпечують за допомогою керованого підсилювача високої частоти 11. Для цього спочатку вимірюють відношення амплітуд г /, завад горизонтальної і вертикальної поляризації на виходах антени за допомогою вимірювача, який складається з двох однакових приймачів завад 15, 16 і обчислювача 17. Після цього сигнал з виходу обчислювача, дорівнює Г відношенню и /Т; , подають на вхід управління підсилювача високої частоти / в 11, коефіцієнт підсилення якого пропорційний сигналу управління. Рівність фаз завад на входах високочастотного пристрою віднімання 12 досягнута за рахунок забезпечення однакових шляхів радіохвиль від вібраторів 3, 4 до входів пристрою віднімання 12 шляхом ідентичного виконання підсилювачів високої частоти 10, 11 і відповідного вибору довжин фідерних ліній 6, 7. Крім того, забезпечена ідентичність фазових характеристик антенної системи на горизонтальній і вертикальній 8 поляризації. Для чого антенна система виконана у вигляді дзеркальної антени з параболічним дзеркалом у формі параболоїда обертання і вібраторним опромінювачем з контррефлектором. Відомо, що у такої антени ширина головної пелюстки діаграми спрямування на горизонтальній поляризації трохи ширше, ніж на вертикальній (у горизонтальній площині), а для ідентичності фазових характеристик необхідно, щоб ширина і зовнішнє положення пелюсток було однаковим на обох поляризаціях, тобто вимагається отримати ідентичні діаграми спрямування. Це досягається за рахунок виконання дзеркала антени з двох частин: суцільної металевої частини і кільцевої дротяної частини з проводів у вигляді однакових дуг парабол, розташованих одна від одної на відстані менш половини довжини хвилі. При цьому ширина апертури дзеркала на вертикальній поляризації відповідає ширині суцільної металевої частини, а на горизонтальній поляризації - ширині всього дзеркала, бо горизонтально поляризовані радіохвилі будуть відбиватися від лівої і правої частин дзеркала, а вертикально поляризовані хвилі не відбиваються від цих проволочних частин. Ширину кільця проволочної частини здеркала можна підібрати так, щоб ширина діаграми спрямування антени на горизонтальній і вертикальній поляризації була однаковою. Можливість практичної реалізації такого технічного рішення підтверджується розрахунками діаграм спрямування запропонованої антени на горизонтальній і вертикальній поляризації, результати яких подані на фіг.2. Ці розрахунки проведені для таких значень параметрів антени: довжина хвилі Я = 0.35 м; фокусна відстань дзеркала / = 2188 м; радіус суцільної металевої частини дзеркала R{ = 1.75 м; радіус проволочної частини дзеркала R2= 1-925 м. З графіків на фіг.2 видно, що діаграми спрямування запропонованої антени на горизонтальній і вертикальній поляризації майже ідентичні, що 9 забезпечує рівність фаз завад на входах пристрою віднімання 12 при прийомі завад по боковим пелюсткам і головній пелюстці в обох головних площинах. Слідує відзначити, що при відсутності завади в випадку, коли лунасигнал цілі разом з горизонтальною складовою містить також невелику вертикальну складову, запропонований пристрій може подавити лунасигнал. Для виключення такої можливості в алгоритмі роботи обчислювача 17 передбачена видача керуючого сигналу, що дорівнює одиниці, у випадку, коли завад немає і рівень напруг на виходах приймачів завад 15, 16 не перевищує заданого порогу. В цьому випадку коефіцієнти підсилення підсилювача високої частоти 10, 11 будуть однакові і мала вертикальна складова луна-сигналу практично не послабить більш інтенсивну горизонтальну складову цього сигналу. Таким чином, запропонований пристрій може бути практично реалізований, а зазначені вище відмітні ознаки є суттєвими і принципово необхідні для реалізації цього пристрою. Основні елементи запропонованого пристрою виконані слідуючим чином. Антенна система виконана у вигляді дзеркальної параболічної антени з вібраторним опромінювачем з двох взаємно перпендикулярних однакових симетричних вібраторів, позаду яких розміщений контррефлектор у вигляді плоского металевого диска. Дзеркало антени складається з двох частин: суцільного металевого параболоїда обертання і доповнюючої його кільцевої дротяної частини з проводів у вигляді однакових дуг парабол, розташованих одна від одної на відстані менш половини довжини хвилі. Фідерні лінії 6, 7 горизонтального і вертикального вібраторів опромінювача виконані з коаксиального кабеля. Можливо також виготовлення цих ліній з двопровідного екранованого кабеля. Довжина ліній вибрана таким чином, щоб забезпечити рівність фаз сигналів вібраторів 6, 7 на входах високочастотного пристрою віднімання 12. Підсилювачі високої частоти 10, 11 ідентичні і можуть бути виконані, наприклад, на високочастотних транзисторах по відомій схемі з загальною базою. Керуюча напруга подається на базу транзистора. Керуюча напруга для підсилювача 11 подається з виходу обчислювача 17 (через цифроаналоговый перетворювач), а керуюча напруга підсилювача 10 постійна і відповідає одиничній вихідній напрузі обчислювача 17. Високочастотний пристрій віднімання 12 повинен віднімати вхідні напруги високої частоти, але не повинен вносити додаткового зрушення фаз в ці напруги. Обчислювач 17 являє собою мікроЕОМ, що обчислить відношення напруг з виходу приймачів завад 15, 16 або таку, що видає одиничний сигнал у випадку, коли ці напруги не перевищують заданого порогу. Поріг повинен бути вище рівня власних шумів приймачів і приблизно відповідати середньому рівню луна-сигналу цілі. Для введення вихідних напруг приймачів завад 15, 16 в обчислювач 17 доцільно використати в останньому аналого-цифрові перетворювачі, а для виведення з обчислювача керуючого сигналу - цифро-аналоговый перетворювач. Приймачі завад 15, 16 повинні бути однаковими і мати однакові коефіцієнти підсилення. Передавач імпульсного сигналу 9, антенний перемикач 8, приймачі 13, 15, 16 і індикатор 14 практично не відрізняються від відповідних елементів прототипу. Слід відзначити, що у випадку, коли завада має тільки вертикальну або тільки горизонтальну поляризацію, працездатність запропонованого пристрою можна забезпечити шляхом повороту антенної системи на 45° у площині апертури. . Динаміка роботи запропонованого пристрою здійснюється слідуючим чином. Передавач 9 формує, а передавальний вібратор горизонтальний З опромінювача і антена випромінюють зондуючий імпульсний сигнал горизонтальної поляризації. Антенна приймає горизонтально поляризований луна-сигнал цілі за допомогою вібратора 3, а також заваду вертикальної поляризації за допомогою приймал ьного вібрат ора 4 і за ваду горизонтальної поляризації вібратором 3. За допомогою вимірювача відношення напруг завад, що складаються обчислювача 17, вимірюють відношення напруг з приймачів завад 15, 16 і r /j завад горизонтальної і a вертикальної поляризації. Сигнали горизонтального 3 і вертикального 4 вібраторів посилюють підсилювачами високої частоти 10, 11. При цьому на вхід управління керованого підсилювача 11 подають сигнал управління з виходу обчислювача 17. Цей сигнал дорівнює відношенню г /} і змінює /и в коефіцієнт підсилення підсилювача 11 пропорційно сигналу управління. При цьому напруги завад на виходах підсилювачів 10, 11 вирівнюються по амплітуді. Подавления завад здійснюється шляхом віднімання вихідних напруг підсилювачів високої частоти 10, 11 за допомогою високочастотного пристрою віднімання 12. Очищений від завад луна-сигнал цілі з цього пристрою посилюється приймачем сигналу 13 і надходить на індикатор 14 радіолокатора. Таким чином, запропонований пристрій вирішує поставлене завдання, частково усуває відзначені недоліки прототипу і забезпечує ефективну боротьбу з відповідними імпульсними і іншими прицільними завадами лінійної поляризації, що приходять по головній пелюстці або по бокових пелюстках діаграми спрямування антени. Для боротьби з завадами використані поляризаційні відмінності завади і сигналу, а просторові І часові відмінності не потрібні. Джерела інформації 1. Теоретические основы радиолокации. Под ред. Я.Д.Ширмана. Учебное пособие для вузов. -М.: Сов. радио, 1970, с. 432, рис. 7.6. 2. Васин В.В., Власов О.В. и др. Радиолокационные устройства (теория и принципы построения). Под ред. В.В.Григорина-Рябова. - М: Сов. радио, 1970, с.518, рис. 18.21, (прототип). Радіолокатор з пристроєм компенсації завад Передава ч імпульсного сигналу Антенний перемикач 9 8 Фідерна лінія \ горизонтального \ \ вібратора 6 ПВЧ сигнаів горизонтальної поляризації Приймач завади горизонтальної поляризації 10 15 Високочастотний пристрій віднімання Прий мач сигналу П 12 Керований ПВЧ сигналів вертикальної поляризації Індикатор и II Ur/Ui иг Обчислювач керованого сигналу М еталічна частина дзеркала ї Приймач завади вертикальної поляризації іб Дротяна. частиіга дзе рка ла 2 Фідерна лінія вертика льного вібратора 7 17 3- горизонтальний вібратор 4- вертикальний вібратор 5- контррефлектор Фіг. 1 Автори: А.М.К удрик С.М.Порошин В.Б.Бахвалов Радіолокатор з пристроєм компенсації завад 0 1 2 10 11 12 13 14 15 trace I trace 2 Азимутальний кут р, град. 1-діаграма направленості горизонтальной поляризації 2-діаграма направленості вертикальной поляризації Фіг.2 Автори: A.M.Кудрик С. М.Порошин В.Б.Бахвалов
ДивитисяДодаткова інформація
Автори англійськоюKudryk Andrii Mykolaiovych, Proroshyn Serhii Mykhailovych, Bakhvalov Valentyn Borysovych
Автори російськоюКудрик Андрей Николаевич, Пророшин Сергей Михайлович, Бахвалов Валентин Борисович
МПК / Мітки
МПК: G01S 7/36
Мітки: завад, компенсації, радіолокатор, пристроєм
Код посилання
<a href="https://ua.patents.su/14-32193-radiolokator-z-pristroehm-kompensaci-zavad.html" target="_blank" rel="follow" title="База патентів України">Радіолокатор з пристроєм компенсації завад</a>
Радіолокатор з пристроєм захисту від прицільних завад
Номер патенту: 32190
Опубліковано: 15.12.2000
Автори: Бахвалов Валентин Борисович, Пророшин Сергій Михайлович, Кудрик Андрій Миколайович
МПК: G01S 7/36
Мітки: прицільних, пристроєм, завад, захисту, радіолокатор
Текст:
...засновано на управлінні поляризацією випромінюваних і приймальних сигналів таким чином, щоб поляризаційні параметри сигналу суттєво відрізнялися від виміряних поляризаційних характеристик завад, що ускладнює попадання завад в основний канал прийому. Технічна сутність і принцип дії запропонованого пристрою пояснюються фіг. 1,2. На фіг. 1 дана спрощена структурна схема запропонованого радіолокатора. На фіг.2 показаний спрощений ескіз...
Радіолокатор з компенсатором завад по бокових пелюстках діаграми спрямування антени
Номер патенту: 32192
Опубліковано: 15.12.2000
Автори: Кудрик Андрій Миколайович, Бахвалов Валентин Борисович, Пророшин Сергій Михайлович
МПК: G01S 7/36
Мітки: компенсатором, пелюстках, бокових, радіолокатор, діаграми, антени, завад, спрямування
Текст:
...з компенсатором завад по бокових пелюстках діаграми спрямування антени, що містить антенну систему з основної приймально-передавальної антени з антенним перемикачем і компенсаційну приймальну антену, передавач імпульсного сигналу, приймачі, пристрій віднімання та індикатор, згідно з винаходом антенна система виконана з однакових рознесених вздовж осі системи антен, перша з яких є основною, а друга - компенсаційною; до складу...
Бортовий радіолокатор підповерхневого зондування з пристроєм захисту від пасивних перешкод
Номер патенту: 17472
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: зондування, пристроєм, перешкод, пасивних, захисту, бортовий, підповерхневого, радіолокатор
Формула / Реферат:
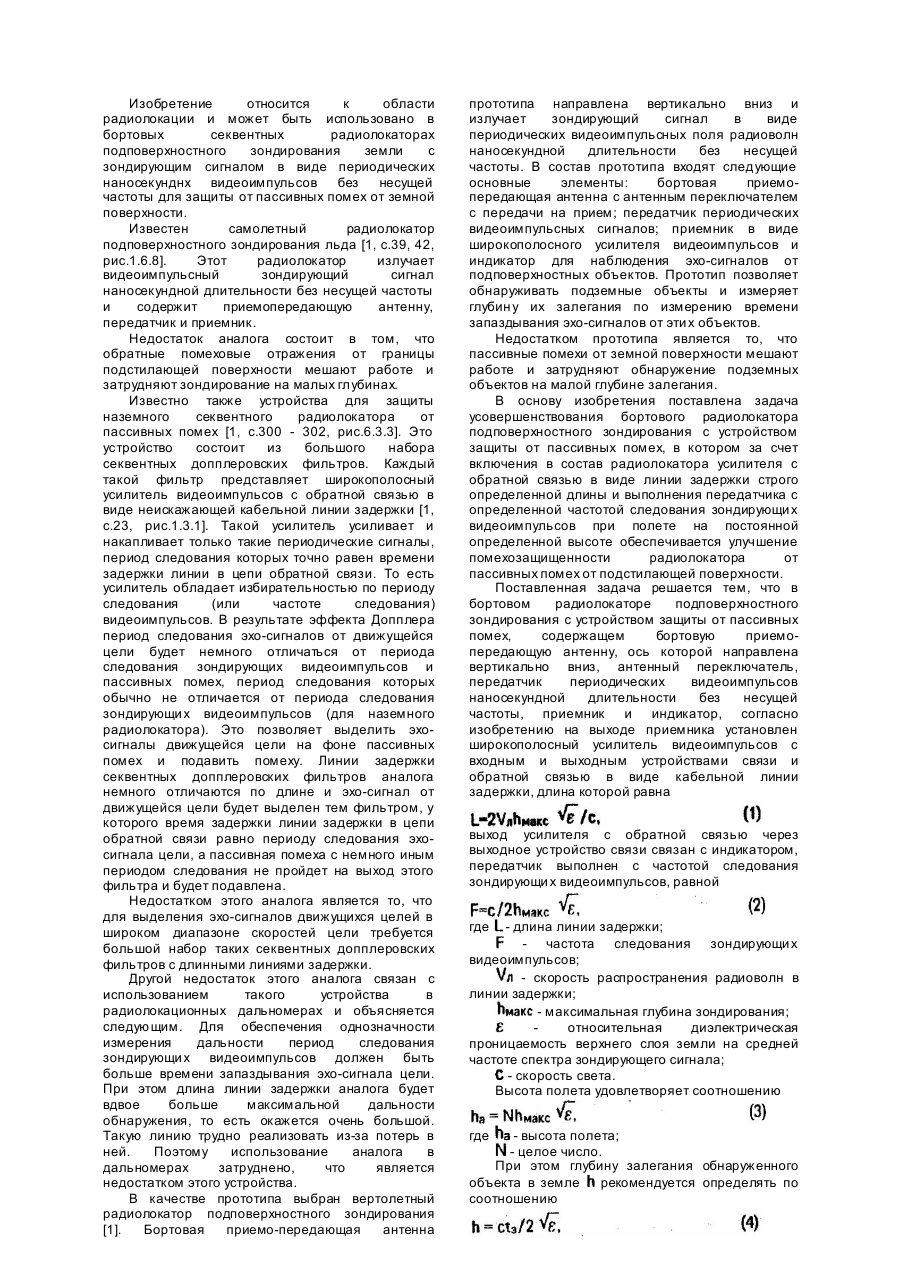
Бортовой радиолокатор подповерхностного зондирования с устройством защиты от пассивных помех, содержащий бортовую приемо-передающую антенну, ось которой направлена вертикально вниз, антенный переключатель, передатчик периодических видеоимпульсов наносекундной длительности без несущей частоты, приемник и индикатор, отличающийся тем, что на выходе приемника установлен широкополосный усилитель видеоимпульсов с входным и выходным устройствами...
Спосіб компенсації завад лінійного чотириполюсника і пристрій для його здійснення
Номер патенту: 22888
Опубліковано: 05.05.1998
Автор: Макаренко Олександр Сергійович
МПК: H04B 1/10
Мітки: лінійного, завад, спосіб, чотириполюсника, здійснення, компенсації, пристрій
Формула / Реферат:
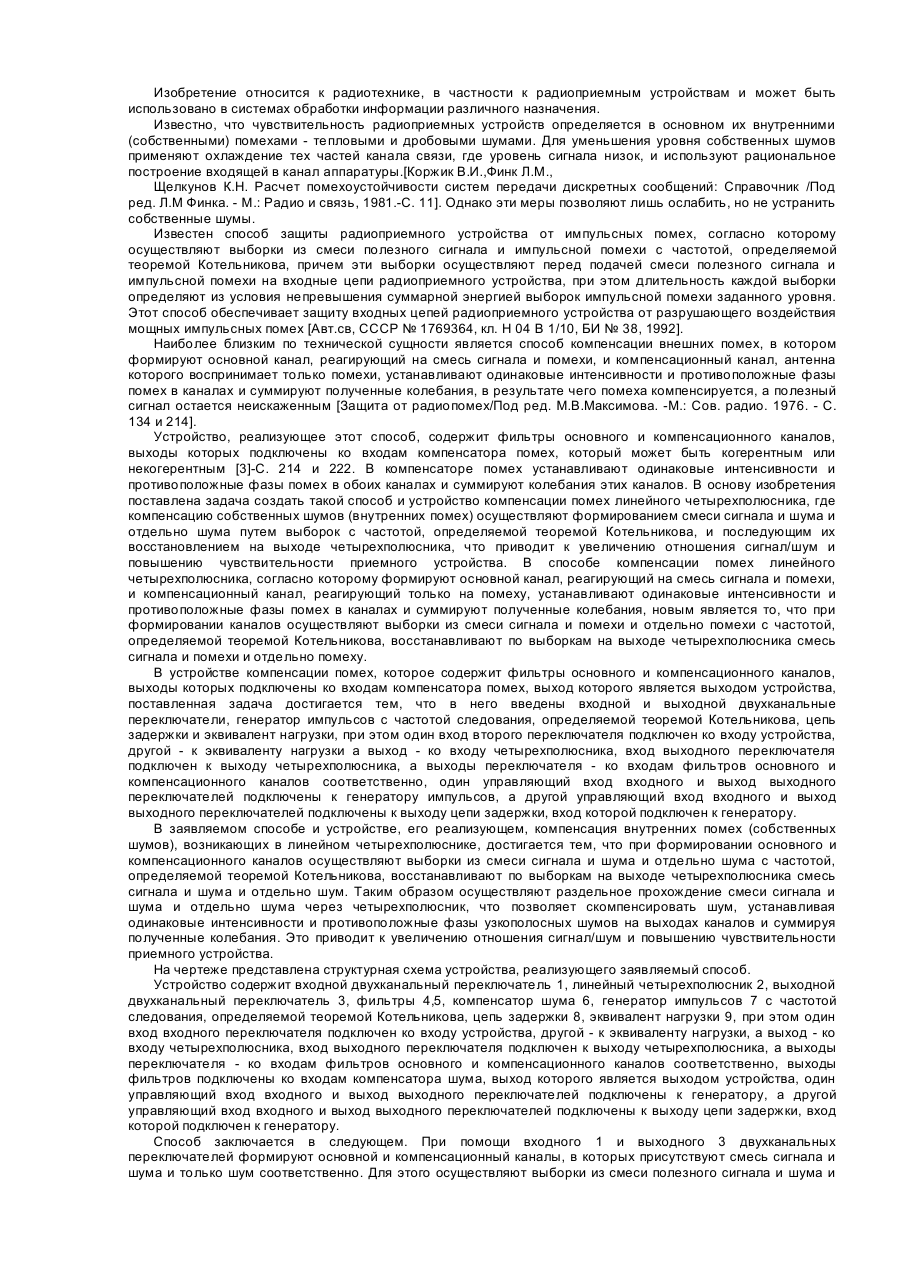
1. Способ компенсации помех линейного четырехполюсника, согласно которому формируют основной канал, реагирующий на смесь сигнала и помехи, и компенсационный канал, реагирующий только на помеху, устанавливают одинаковые интенсивности и противоположные фазы помех в каналах, суммируют полученные колебания, отличающийся тем, что при формировании каналов осуществляют выборки из смеси сигнала и помехи и отдельно помехи с частотой, определяемой...
Двокоординатний імпульсний радіолокатор
Номер патенту: 32200
Опубліковано: 15.12.2000
Автори: Бахвалов Валентин Борисович, Пророшин Сергій Михайлович, Кудрик Андрій Миколайович
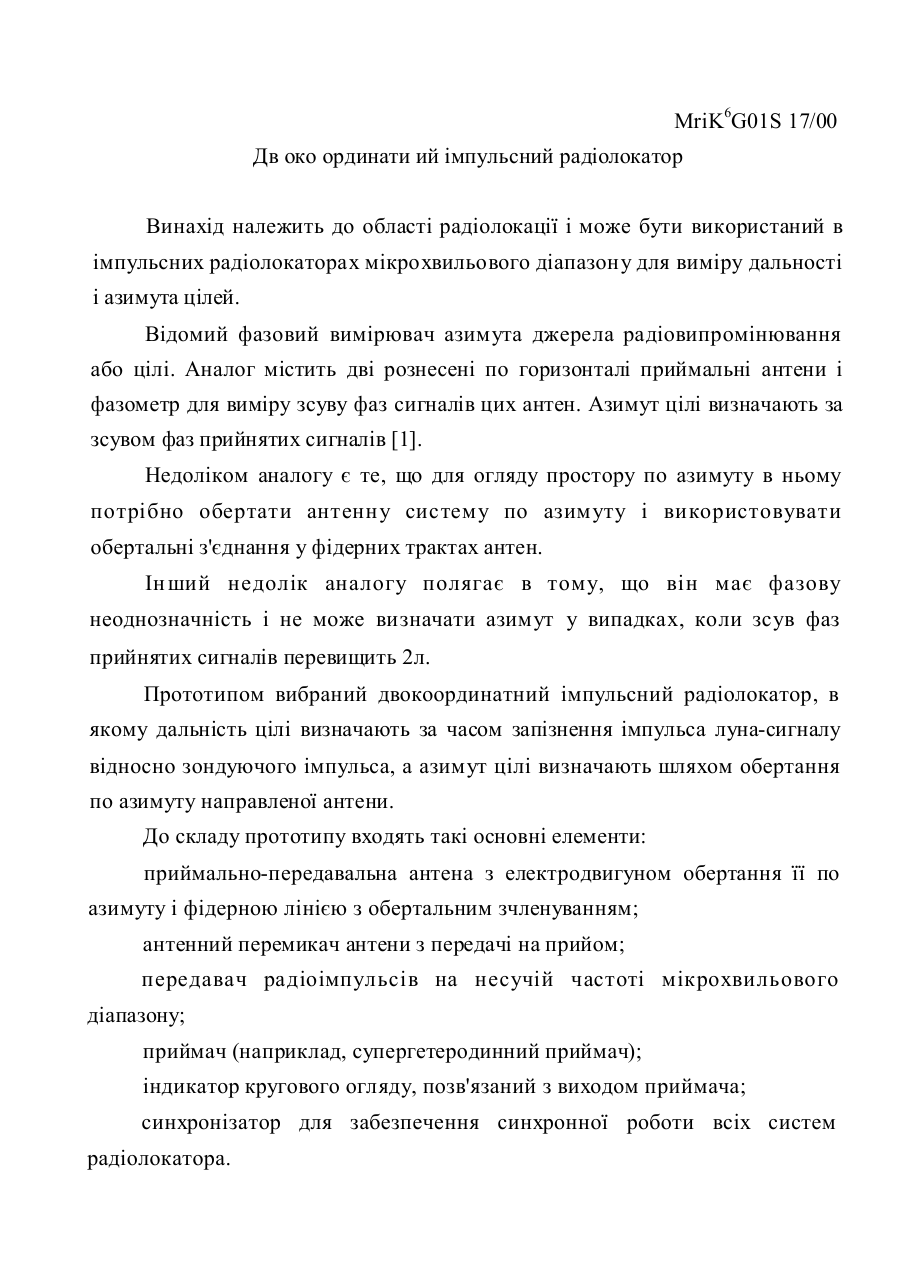
МПК: G01S 17/00
Мітки: радіолокатор, імпульсний, двокоординатний
Текст:
...антену у вигляді вібраторної антени типу «хвильовий» канал з нерухомим активним симетричним напівхвильовим вібратором і обертальними по азимуту директорами і рефлектором. Це дозволяє виконати фідерну лінію у вигляді нерухомої коаксиальної фідерної лінії, що пов'язує активний вібратор антени з антенним перемикачем, і виключити з цієї лінії обертальне зчленування. Відсутність обертального зчленування дозволяє збільшити пікову потужність...
Попередній патент: Радіолокатор з компенсатором завад по бокових пелюстках діаграми спрямування антени
Наступний патент: Радіолокатор з пристроєм компенсації завад відніманням
Випадковий патент: Рятувальний дихальний пристрій