Двокоординатний імпульсний радіолокатор
Номер патенту: 32200
Опубліковано: 15.12.2000
Автори: Бахвалов Валентин Борисович, Пророшин Сергій Михайлович, Кудрик Андрій Миколайович

Текст
MriK6G01S 17/00 Дв око ординати ий імпульсний радіолокатор Винахід належить до області радіолокації і може бути використаний в імпульсних радіолокаторах мікрохвильового діапазону для виміру дальності і азимута цілей. Відомий фазовий вимірювач азимута джерела радіовипромінювання або цілі. Аналог містить дві рознесені по горизонталі приймальні антени і фазометр для виміру зсуву фаз сигналів цих антен. Азимут цілі визначають за зсувом фаз прийнятих сигналів [1]. Недоліком аналогу є те, що для огляду простору по азимуту в ньому потрібно обертати антенну систему по азимуту і використовувати обертальні з'єднання у фідерних трактах антен. Ін ший недолік аналогу полягає в тому, що він має фазову неоднозначність і не може визначати азимут у випадках, коли зсув фаз прийнятих сигналів перевищить 2л. Прототипом вибраний двокоординатний імпульсний радіолокатор, в якому дальність цілі визначають за часом запізнення імпульса луна-сигналу відносно зондуючого імпульса, а азимут цілі визначають шляхом обертання по азимуту направленої антени. До складу прототипу входять такі основні елементи: приймально-передавальна антена з електродвигуном обертання її по азимуту і фідерною лінією з обертальним зчленуванням; антенний перемикач антени з передачі на прийом; передавач радіоімпульсів на несучій частоті мікрохвильового діапазону; приймач (наприклад, супергетеродинний приймач); індикатор кругового огляду, позв'язаний з виходом приймача; синхронізатор для забезпечення синхронної роботи всіх систем радіолокатора. г Для виміру азимута цілі антени прототипу повинні мати вузьку діаграму спрямування і потрібно обертати антену по азимуту за допомогою електродвигуна. При цьому азимут цілі визначають за положенням антени в момент прийому максимального луна-сигналу. Крім того, фідерна лінія антени прототипу повинна мати обертальне зчленування, що забезпечує можливість обертання антени при нерухомій іншій апаратурі радіолокатора [1]. Недоліком прототипу є те, що до його складу входить обертальне зчленування , яке складно виконати при великій піковій потужності передавача. Інший недолік прототипу полягає в тому, що при невеликих розмірах антени і широкій діаграмі спрямування антени по азимуту точність виміру азимута цілі буде низькою. Нижче пропонується технічне рішення, що дозволяє виключити зі складу радіолокатора обертальне зчленування і підвищити точність виміру азимута при порівняно невеликих розмірах антени. В о сн о ву ви на хо ду по ст а вл ен а за дач а вдос ко на ле нн я двокоординатного імпульсного радіолокатора, в якому за рахунок виконання антени у вигляді антени типу «хвильовий» канал з нерухомим активним вібратором і обертальними по азимуту директорами і рефлектором та включення до складу радіолокатора генератора частоти обертання антени по азимуту, вузькосмужковього фільтра цієї частоти і фазометра забезпечується підвищення точності виміру азимута вибраної цілі і виключення зі складу пристрою обертального зчленування, що спрощує конструкцію антенно-фідерної системи. Поставлена задача вирішується тим, що в двокоординатному імпульсному радіолокаторі, що містить приймально-передавальну антену з електродвигуном обертання її по азимуту, антенний перемикач, імпульсний передавач, приймач і пов'язаний з ним індикатор, згідно з винаходом антена виконана у вигляді вибраторної антени типу «хвильовий канал», в якому нерухомий активний напівхвильовий вібратор пов'язаний коаксиальною фідерною лінією з антенним перемикачем, а директори і рефлектор механічно пов'язані з електродвигуном обертання їх по азимуту; на виході приймача додатково встановлений відеопідсилювач, пов'язаний з вузькосмужковим фільтром на частоту обертання антени по азимуту; до складу радіолокатора додатково включені генератор стробів відеопідсилювача, генератор частоти обертання антени по азимуту і фазометр зсуву фаз напруги останнього генератора і вихідної напруги вузькосмужкового фільтра. При цьому покази фазометра дорівнюють азимуту цілі, азимутальний сектор якої виділений імпульсом стробу генератора стробів. Імпульси цього генератора відкривають відеопідсилювач, коли антенна знаходиться в азимутальному секторі вибраної цілі. Синусоїдальна напруга генератора частоти обертання антени синхронізована з обертанням антени і максимум цієї напруги відповідає нульовому азимуту положення антени. Вимір дальності цілі в запропонованому пристрої здійснюють так само, як і в прототипі, за часом запізнення імпульса луна-сигналу цілі відносно зондуючого імпульса. Виконання антени у вигляді антени типу «хвильовий» канал з нерухомим активним вібратором і обертальними по азимуту директорами і рефлектором дозволяє виключити зі складу пристрою обертальне зчленування, а використання генератора частоти обертання антени, стробованого відеопідсилювача з вузькосмужковим фільтром і фазометра дозволяє використати фазовий метод виміру азимута і підвищує точність виміру. Запропоноване технічне ршоння спрощує конструкцію антеннофідерної системи радіолокатора. Технічна сутність і принцип дії запропонованого пристрою пояснюються фіг. 1, де дається спрощена структурна схема двокоординатного імпульсного радіолокатора і показаний спрощений ескіз приймальнопередавальної антени. До складу запропонованого пристрою на фіг. І входять такі основні елементи; приймально-передавальна антена типу «хвильовий» канал з нерухомого симетричного напівхвильового активного вібратора 1 і обертальних по азимуту рефлектора 2 і директорів 3; електродвигун 4 обертання по азимуту директорів і рефлектора антени; коаксиальна фідерна лінія 5, що пов'язує активний вібратор антени 1 з антенним перемикачем; антенний перемикач 6 активного вібратора антени з передачі на прийом; імпульсний передавач 7 періодичних радіоімпульсів на несучій частоті мікрохвильового діапазону; приймач 8 (наприклад, супергетеродинний приймач з підсилювачами високої і проміжної частоти, змішувачем, гетеродином і амплітудним детектором); індикатор 9 кругового огляду, пов'язаний з виходом приймача на відеочастоті; стробований відеопідсштювач 10 вихідної напруги приймача (вхід управління цього підсилювача пов'язаний з виходом генератора стробів); генератор стробів 11 (цей генератор генерує відеоімпульси з частотою слідування, що дорівнює частоті обертання антени, які відкривають відеопідсилювач 10, коли антена знаходиться у вибраному азимутальному секторі, а положення цього сектора вибирають у процесі роботи); вузькосмужковій фільтр 12, частота настройки якого дорівнює частоті обертання антени FB ПО азимуту; генератор 13 частоти обертання FB антени по азимуту (синусоїдальна напруга цього генератора синхронізована з обертанням антени, а максимум напруги відповідає нульовому азимуту антени); фазометр 14 зсуву фаз вихідної напруги фільтра 12 відносно напруги генератора 13 (цей зсув фаз дорівнює азимуту (3 вибраної цілі). Принцип дії запропонованого пристрою пояснюється наступним. Для виключення зі складу радіолокатора обертально го зчленування пропонується виконати приймально-передавальну антену у вигляді вібраторної антени типу «хвильовий» канал з нерухомим активним симетричним напівхвильовим вібратором і обертальними по азимуту директорами і рефлектором. Це дозволяє виконати фідерну лінію у вигляді нерухомої коаксиальної фідерної лінії, що пов'язує активний вібратор антени з антенним перемикачем, і виключити з цієї лінії обертальне зчленування. Відсутність обертального зчленування дозволяє збільшити пікову потужність передавача і спрощує конструкцію антенно-фідерної системи радіолокатора. Для підвищення точності виміру азимута цілі пропонується використати новий фазовий метод виміру азимута, заснований на обертанні діаграми спрямування антени по азимуту, виділення з прийнятих лунасигналів синусоїдальної напруги з частотою обертання антени і виміру фази цієї напруги. Використання такого фазового методу потрібне тоді, коли діаграма спрямування антени по азимуту порівняно широка (розміри антени малі) і точність відомого методу виміру азимута за положенням антени недостатня. Для реалізації нового фазового методу виміру азимута цілі до складу пристрою додатково включені вузькосмужковий фільтр 12, генератор частоти FB обертання антени по азимуту і фазометр 14 зсуву фаз вихідної напруги цього фільтра відносно напруги генератора. При наявності однієї цілі в зоні огляду радіолокатора і обертанні антени по азимуту з частотою F B на виході приймача будуть присутні періодичні відеоімпульси луна-сигналів цілі. Ці відеоімпульси слідують з періодом, відповідним частоті F слідування зондуючих імпульсів передавача, а групи цих імпульсів будуть періодично повторюватися з іншим періодом, відповідним частоті обертання антени FB. При цьому частота слідування F зондуючих імпульсів передавача значно більша частоти FB обертання антени по азимуту. Генератор 13 генерує синусоїдальну напругу частоти FB, яка синхронізована з частотою обертання антени, і максимум цієї напруги відповідає нульовому азимуту положення антени. З вихідної напруги приймача на відеочастоті виділяють за допомогою вузькосмужкового фільтра 12 синусоїдальну напругу частоти FB. ТОДІ зсув фаз вихідної напруги фільтра 12 відносно напруги генератора 13 буде дорівнювати азимутальному куту цілі р. Цей зсув фаз (або азимут цілі (3) вимірюють фазометром 14, що підвищує точність виміру азимута при порівняно широкій діаграмі спрямування антени. Недоліком запропонованого вище фазового методу виміру азимута цілі є те, що при одночасній наявності в зоні огляду радіолокатора декількох цілей уточнити азимути цих цілей за зсувом фаз не вдається. Для усунення цього недоліку пропонується за допомогою азимутального стробування виділити сектор в якому знаходиться одна ціль, азимут якої потрібно уточнити. Тоді покази фазометра 14 будуть дорівнювати азимуту цієї цілі. Для цього до складу радіолокатора додатково включений стробований відеопідсилювач 10, вхід управління якого позв'язаний з керованим генератором стробів 11. Цей відеопідсилювач постійно закритий і пропускає прийнятий приймачем 8 сигнал на вихід тільки тоді, коли на вхід управління цього підсилювача надходить прямокутний відеоімпульс строба від генератора 11. Цей генератор генерує прямокутні відеоімпульси з частотою слідування, що дорівнює частоті F B обертання антени, а тривалість і положення цього імпульса відповідають вибраному азимутальному сектору, в якому знаходиться одна вибрана ціль. Цей сектор вибирають за допомогою індикатора кругового огляду 9, а необхідні параметри генератора стробів 11 встановлюють вручну. Тобто вимір азимута цілі здійснюють в два етапи. Спочатку за індикатором кругового огляду 9 вимірюють дальність і грубо оцінюють азимути всіх цілей, які знаходяться в зоні огляду радіолокатора, а також вибирають ціль, азимут якої треба уточнити. Після цього вибирають азимутальний сектор, в якому знаходиться тільки одна вибрана ціль, і встановлюють цей сектор елементами управління генератора стробів 11. Уточнене значення азимута вибраної цілі визначають за показанням фазометра 14. При наявності в зоні огляду радіолокатора тільки однієї цілі стробуваги відеопідшлювач 10 не потрібно. Вузькосмужковий фільтр 12 настроєний на частоту F B обертання антени і потрібний для виділення з вихідних відеоімпульсів приймача 8 синусоїдальної напруги цієї частоти. Відеопідсилювач 10 з генератором стробів 11 потрібен для виділення азимутального сектора, в якому знаходиться одна вибрана ціль. Генератор 13 синусоїдальної напруги частоти FB, вузькосмужковий фільтр 12 і фазометр 14 необхідні для уточнення азимута р вибраної цілі запропонованим фазовим методом. Таким чином, запропонований пристрій може бути практично реалізований, а зазначені вище його характерні ознаки є істотними і принципово необхідні для реалізації цього пристрою. Основні елементи запропонованого пристрою на фіг.1 виконані таким чином. Приймально-передавальна антена виконана у вигляді вибраторної антени типу «хвильовий» канал. Активний вібратор 1 цієї антени виконаний ч у вигляді нерухомого симетричного напівхвильового вібратора, пов'язаного коаксиальною фідерною лінією 5 з антенним перемикачем 6. Ця фідерна лінія проходить всередині верхнього плеча вібратора 1. Зовнішня металева оболонка фідерної лінії 5 і верхнє плече вібратора 1, виконане у вигляді металевої труби, утворять відрізок лінії довжиною в чверть довжини хвилі ХІ4. Нижній кінець цього відрізка лінії закорочений, а верхній - розімкнутий, тобто така лінія утворить чвертьхвильовий склянку, що перешкоджає затіканню струму вібратора на зовнішню металеву оболонку фідерної лінії 5. Рефлектор 2 і директори 3 антени механічно пов'язані з валом електродвигуна 4 і обертаються по азимуту з частотою обертання FB, яка значно менша частоти слідування зондуючих імпульсів F. Відеопідсилювач прийнятих відеоімпульсів 10 встановлений на виході приймача 8 і виконаний у вигляді широкосмужкового відеопідсилювача зі входом управління, на який надходять відеоімпульси управління з генератора стробів 11. Цей підсилювач постійно закритий і відкривається тільки тоді, 8 коли на його вході управління є відеоімпульс генератора стробів 11. Цей генератор виконаний у вигляді керованого генератора періодичних прямокутних відеоімпульсів з частотою слідування, що дорівнює частоті обертання антени F B. Тривалість і положення відеоімпульсів цього генератора встановлюють вручну елементами управління цим генератором у відповідності до вибраного азимутального сектора, в якому знаходиться одна вибрана ціль. Вузькосмужковий фільтр 12 настроєний на частоту обертання антени F B. Генератор 13 виконаний у вигляді генератора синусоїдальної напруги з частотою F B І синхронізований з частотою обертання антени. Максимум напруги цього генератора відповідає моменту проходження антеною нульового азимута. Фазометр 14 має відому конструкцію і вимірює зсув фаз вихідних напруг фільтра 12 і генератора 13. Антенний перемикач 6, імпульсний передавач 7, приймач 8 та індикатор кругового огляду 9 не відрізняються від відповідних елементів прототипу. Динаміка роботи запропонованого пристрою здійснюється таким чином. Передавач 7 формує, а приймально-передавальна антена випромінює зондуючий сигнал у вигляді періодичних радіоімпульсів на високій несучій частоті, f мікрохвильового діапазону з частотою слідування F. Антенний перемикач 6 переключає антену з передачі на прийом. Активний вібратор 1 антени нерухомий, а директори 3 і рефлектор 2 антени обертають по азимуту електродвигуном 4 з частотою обертання F B
ДивитисяДодаткова інформація
Назва патенту англійськоюTwo-coordinate pulse radar
Автори англійськоюKudryk Andrii Mykolaiovych, Proroshyn Serhii Mykhailovych, Bakhvalov Valentyn Borysovych
Назва патенту російськоюДвух координатный инмульсный радиолокатор
Автори російськоюКудрик Андрей Николаевич, Пророшин Сергей Михайлович, Бахвалов Валентин Борисович
МПК / Мітки
МПК: G01S 17/00
Мітки: радіолокатор, імпульсний, двокоординатний
Код посилання
<a href="https://ua.patents.su/10-32200-dvokoordinatnijj-impulsnijj-radiolokator.html" target="_blank" rel="follow" title="База патентів України">Двокоординатний імпульсний радіолокатор</a>
Радіолокатор
Номер патенту: 31345
Опубліковано: 15.12.2000
Автори: Кудряшов Валерій Євгенович, Побережний Андрій Анатолійович, Наконечний Володимир Сергійович, Петров Ігор Валерійович
МПК: G01S 13/34
Мітки: радіолокатор
Текст:
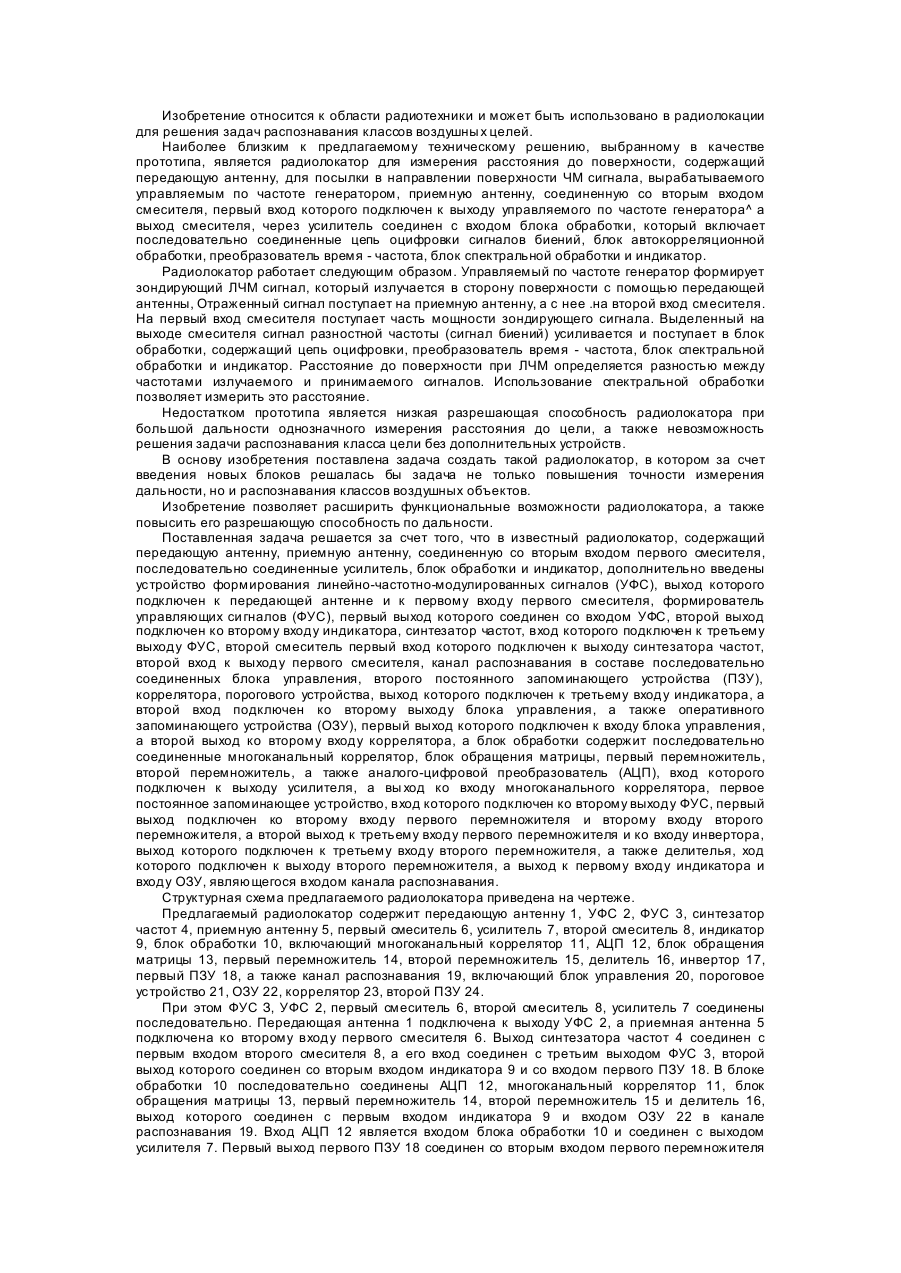
...вкодом першого перемно жувача 14 та Б другим входом другого перемножувача 15, а другий вихід ШП 18 їфізь мультиплексор 21 з'єднай Б третій входом першого перемножувала 14 та s входом інвертора 17, вихід останнього а'бднан а третім входом другого перемножувача15. Перший вихід 08П 26 крізь мультиплексор 19 підключен до багатоканального ка релятора 12, а другий вихід ШП 26 з'єднується а входом блока керування £4. Запропонований радіолокатор...
Бортовий секвентний радіолокатор для виявлення рухомих цілей на поверхні землі
Номер патенту: 17458
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 13/06
Мітки: секвентний, цілей, поверхні, радіолокатор, землі, виявлення, рухомих, бортовий
Формула / Реферат:
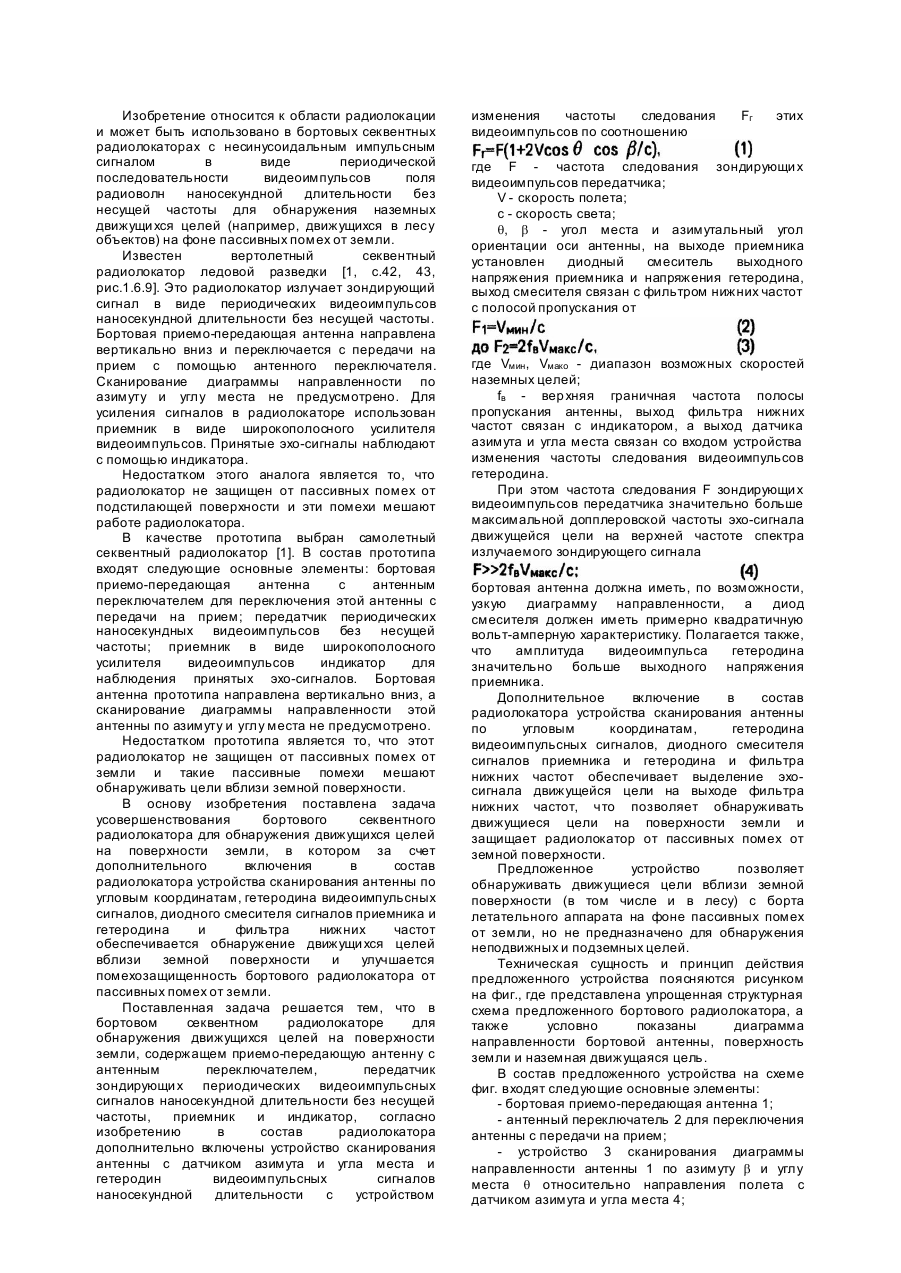
Бортовой секвентный радиолокатор для обнаружения движущихся целей на поверхности земли, содержащий приемо-передающую антенну с антенным переключателем, передатчик зондирующих периодических видеоимпульсных сигналов наносекундной длительности без несущей частоты, приемник и индикатор, отличающийся тем, что в состав радиолокатора дополнительно включены устройство сканирования антенны с датчиком азимута и угла места и гетеродин видеоимпульсных...
Трикоординатний секвентний радіолокатор
Номер патенту: 17457
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 13/06
Мітки: секвентний, радіолокатор, трикоординатний
Формула / Реферат:
Трехкоординатный секвентный радиолокатор, содержащий антенную систему из двух разнесенных по горизонтали антенн, одна из которых является приемо-передающей, а другая - приемной, антенный переключатель, передатчик периодических видеоимпульсов наносекундной длительности без несущей частоты и приемник, отличающийся тем, что на выходе приемной антенны установлено устройство вычитания сигналов приемной антенны из сигналов приемо-передающей...
Радіолокатор
Номер патенту: 12453
Опубліковано: 28.02.1997
Автори: Яковенко Віталій Адольфович, Побережний Андрій Анатолійович, Дорощук Валерій Анатолійович, Кудряшов Валерій Євгенійович
МПК: G01S 13/34
Мітки: радіолокатор
Формула / Реферат:
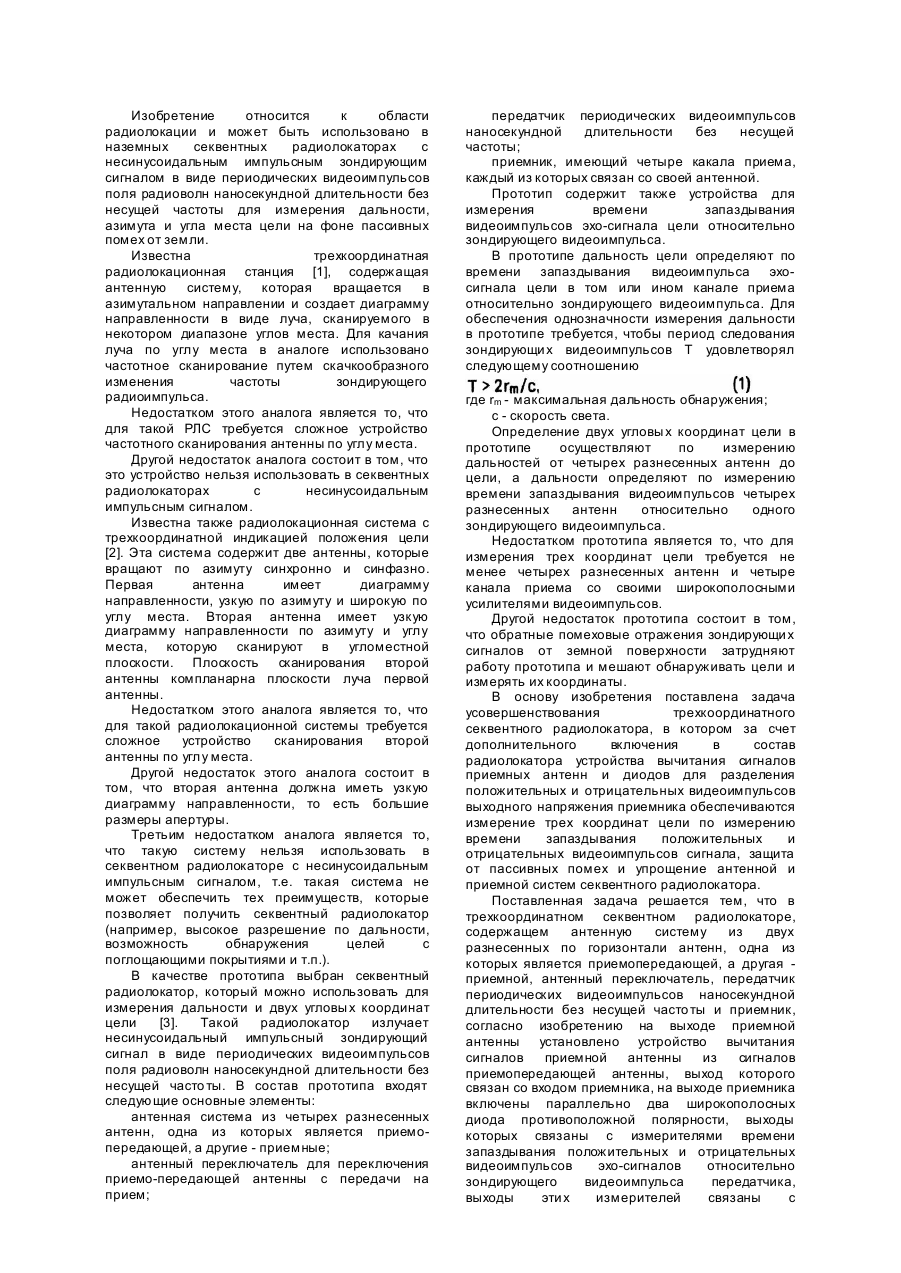
Радиолокатор, содержащий передающую антенну, приемную антенну, соединенную со вторым входом первого смесителя, последовательно соединенные усилитель, блок обработки и индикатор, отличающийся тем, что дополнительно введены устройство формирования линейно-частотномодулированных сигналов, выход которого подключен к передающей антенне и к первому входу первого смесителя, формирователь управляющих сигналов, первый выход которого соединен со...
Частотно-імпульсний ультразвуковий витратомір
Номер патенту: 28620
Опубліковано: 16.10.2000
Автори: Криничний Петро Якович, Бестелесний Андрій Григорович, Карпаш Олег Михайлович, Петришин Ігор Степанович
Мітки: витратомір, частотно-імпульсний, ультразвуковий
Формула / Реферат:
Частотно-імпульсний ультразвуковий витратомір, який включає два випромінюючих похилих п'єзоперетворювачі, під'єднаних до відповідних виходів генераторів зондуючих імпульсів, два приймальних похилих п'єзоперетворювачі, під'єднаних до відповідних входів підсилювачів, два формувачі коротких імпульсів для повторного запуску генераторів зондуючих імпульсів, блок виділення різницевої частоти і вимірювальний блок, який відрізняється тим що містить...
Попередній патент: Кутикова антена з вібраторним опромінювачем
Наступний патент: Спосіб прогнозування діабетичної нефропатії у дітей та підлітків, хворих на цукровий діабет
Випадковий патент: Макаронні вироби