Механізм для поздовжнього переміщення штанги з нитководієм ниткошвейної машини
Номер патенту: 3486
Опубліковано: 27.12.1994
Автори: Душкевич Яків Трохимович, Бойко Анатолій Володимирович
Формула / Реферат
1. Механизм для продольного перемещения штанги с нитеводителями ниткошвейной машины, состоящий из рычага, установленного на корпусе машины и имеющего поворотную вилку с фиксатором, и кулачка, установленного на вспомогательном валу, причем штанга размещена в направляющих качающегося стола и имеет ролик, взаимодействующий с вилкой рычага, который имеет два отверстия для установки ролика для взаимодействия с одной из двух дорожек кулачка, имеющих постоянные и сопрягаемые с ними криволинейные рабочие участки, на которых текущие линейные протяженности LT1,2, измеряемые от правого торца кулачка до их центральных осей, и соответствующие им координатные углы , отсчитываемые от начальной угловой координаты кулачка в направлении против часовой стрелки, переменны и обеспечивают движение штанги вправо-влево на ход , причем каждый рабочий участок дорожек имеет начальную угловую координату , угловую протяженность ΝФn и параметр , представляющий линейную протяженность рабочего участка в направлении, параллельном LT1,2, где U1 -переменное передаточное число рычажного контура привода, akn - инвариант перемещений, = = = 44,5 мм - хода штанги на рабочих участках N = 1 - для первой и N = 2 - для второй дорожки, причем рабочие участки, 2 и 4 первой, а также 2 и 5 второй дорожки образованы кривыми, обеспечивающими движение штанги по закону периодического движения - диаграмма ускорений - косинусоида, отличающийся тем, что дорожка имеет пять, а 2-я - шесть рабочих участков, для которых и ΝФn определяются из интервалов:
и линейные хода штанги на некоторых участках, для расчета LT1,2 также определяются из интервалов:
причем второй и четвертый рабочий участки первой дорожки и второй и пятый участки второй дорожки образованы кривыми, которые обеспечивают движение штанги по закону периодического движения - диаграмма ускорений - синусоида.
Текст
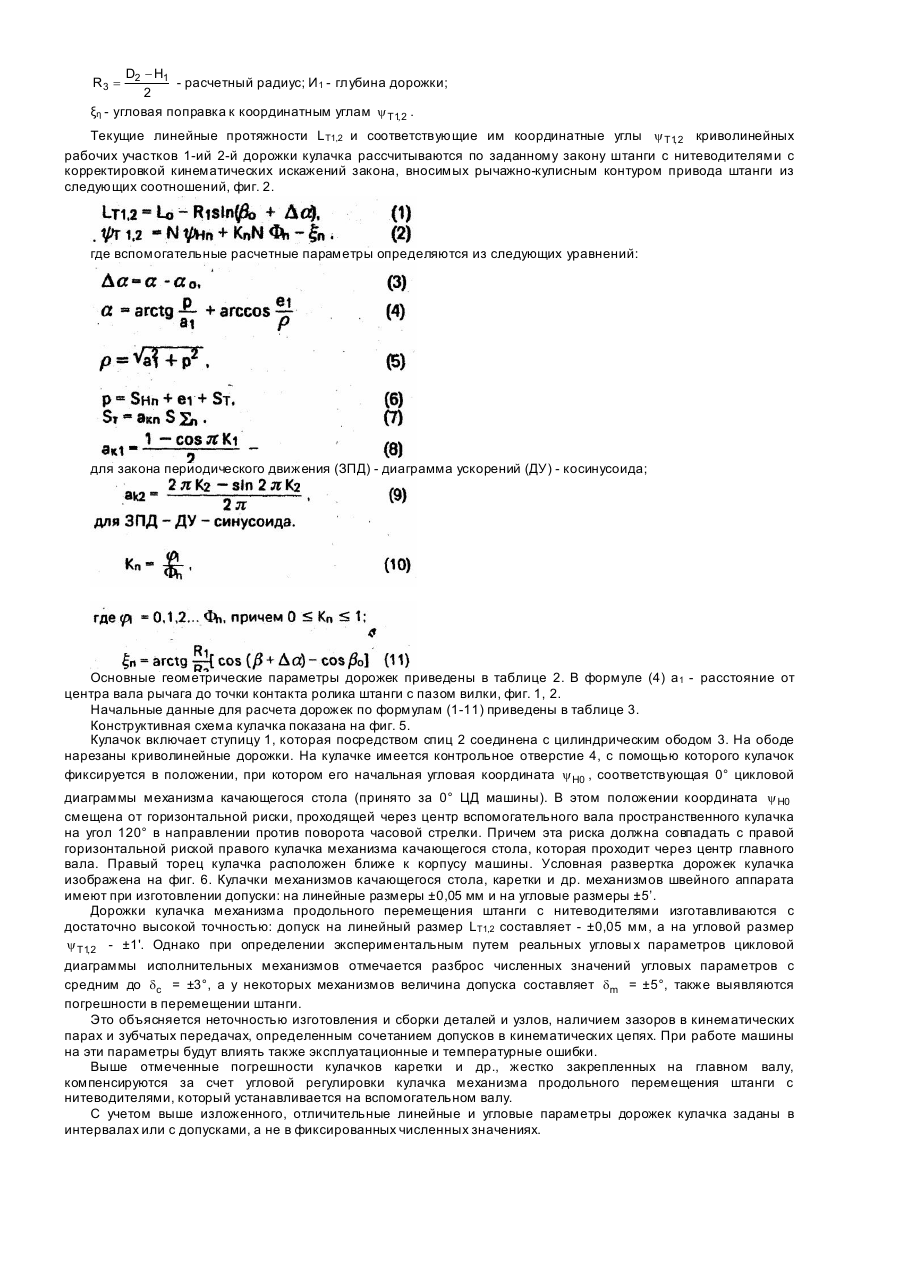
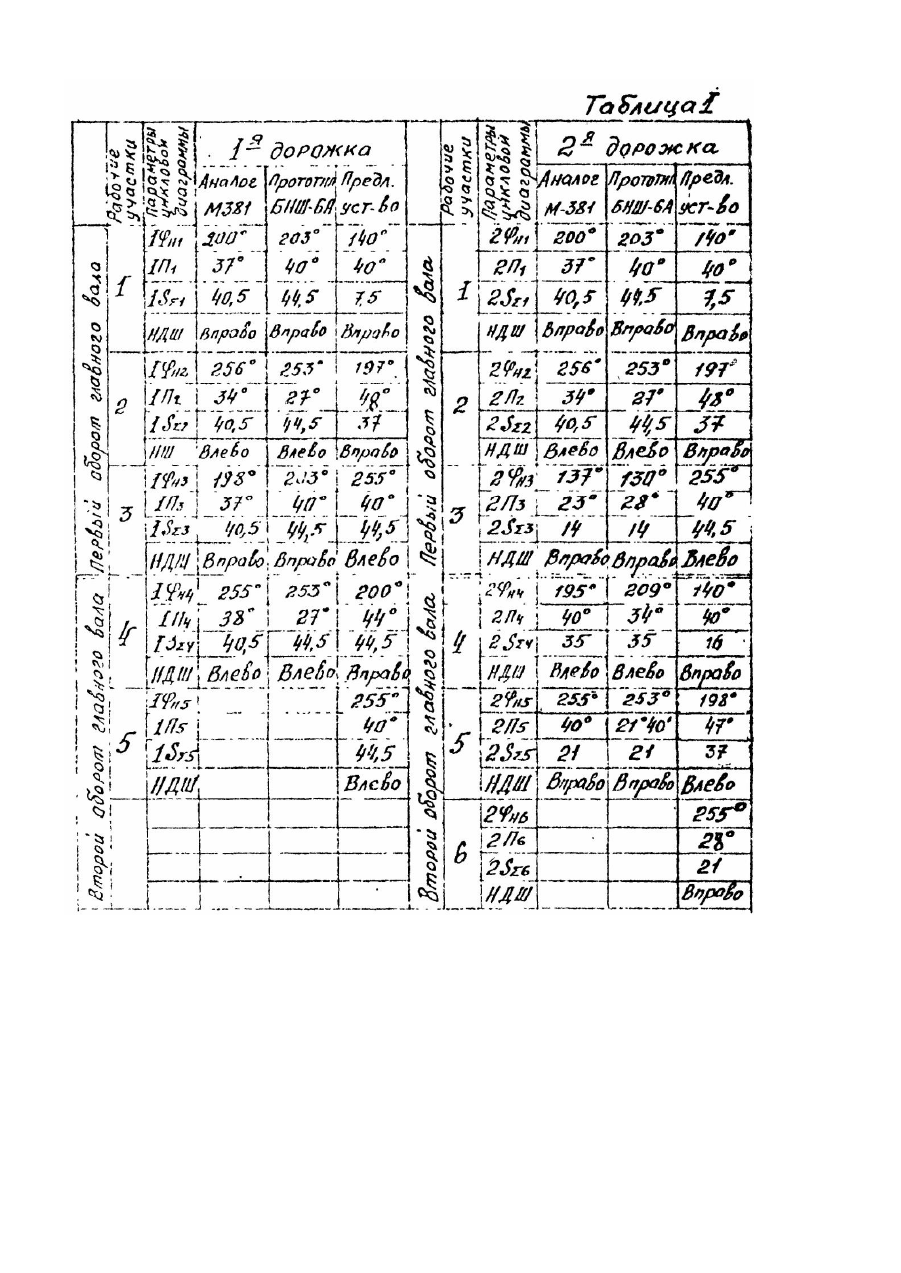
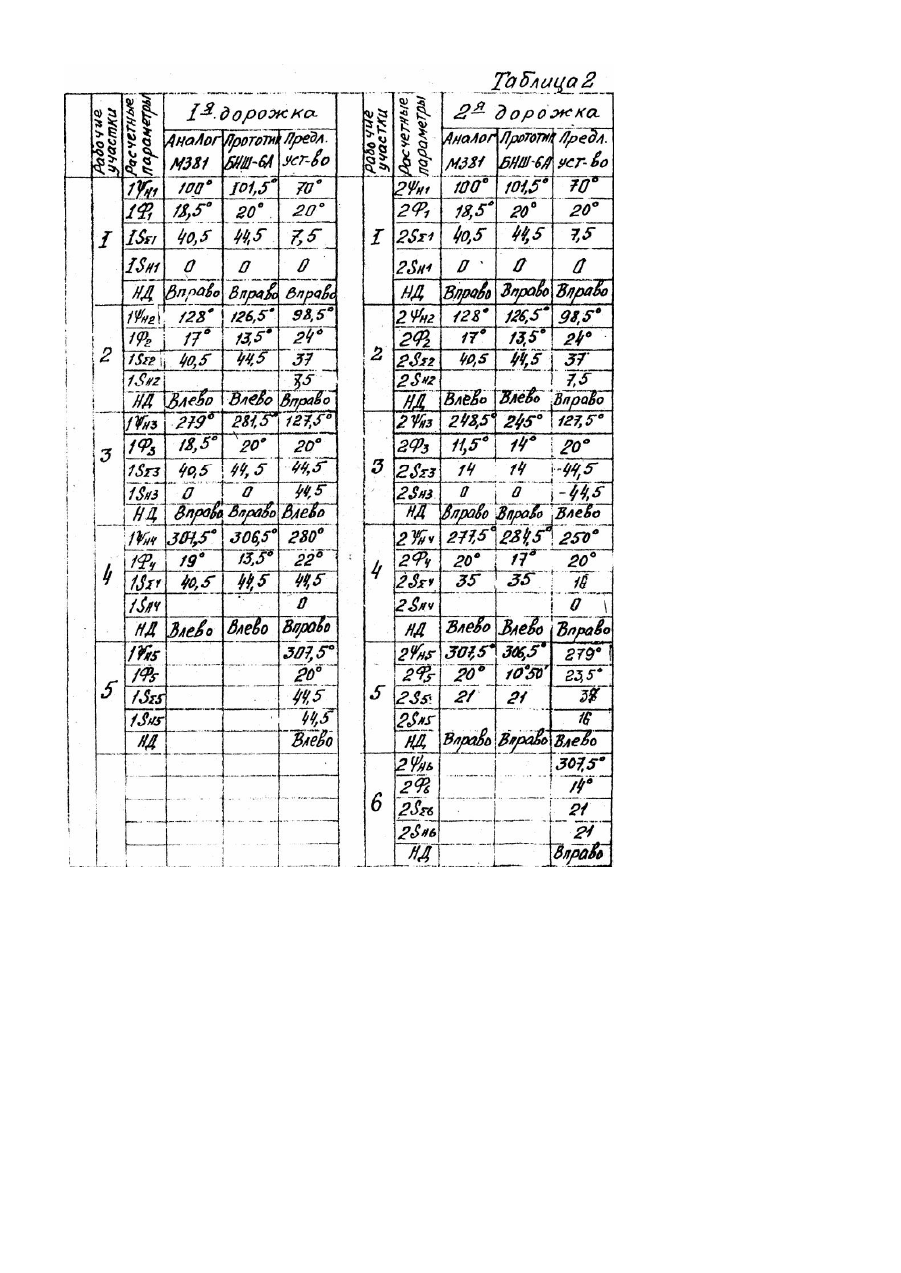
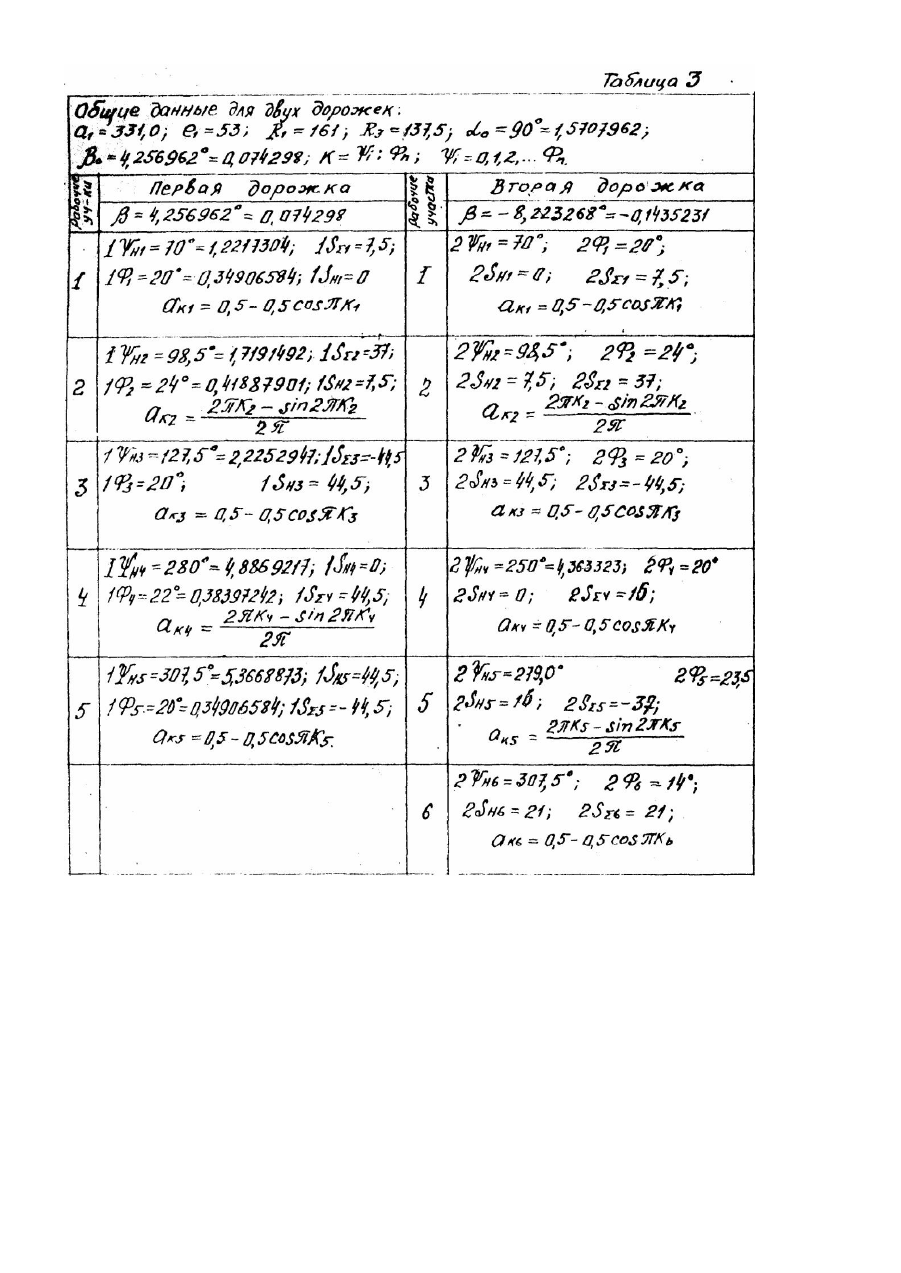
Изобретение относится к полиграфическому машиностроению и предназначено к применению в ниткошвейных машинах. Известен механизм для продольного перемещения штанги с нитеводителями ниткошвейной машины. Ме ханизм для продольного перемещения штанги с нитеводителями ниткошвейной машины, состоящий из рычага, установленного на корпусе машины и имеющего поворотную вилку с фиксатором, и кулачка, установленного на вспомогательном валу, причем штанги размещена в направляющих качающегося стола и имеет ролик, взаимодействующий с вилкой рычага, который имеет два отверстия для установки ролика для взаимодействия с одной из двух дорожек кулачка. Пространственный кулачок имеет постоянные и сопрягаемые с ними криволинейные - рабочие участки, на которых текущие линейные протяженности LT1,2, измеряемые от правого торца кулачка до их центральных осей и соответствующие им координатные углы y T 1, 2 , отсчитываемые от начальной угловой координаты y H0 в направлении против часовой стрелки - переменны и обеспечивают движение штанги вправо-влево на ход NSå n , причем каждый рабочий участок дорожек имеет начальную угловую координату N Фнn, угловую протяженность N Фn и параметр [ DL n ]max = [L T 1, 2 ]max -[L T 1,1]min = f (S å n , U1, a kn ) , представляющий линейную протяженность рабочего участка в направлении, параллельном LT1,2, где U1 - переменное передаточное число рычажного контура привода, аkn - инвариант перемещений, 1S å 3 = 1S å 4 = 1S å 5 = 2Så 3 » 44,5 мм - хода штанги на рабочих участках, N = 1 - для первой и N = 2 - для второй дорожки, причем рабочие участки, кроме 2 и 4 первой, а также 2 и 5 второй дорожки образованы кривыми, обеспечивающими движение штанги по закону периодического движения - диаграмма ускорений - косинусоида. Прототип имеет неоптимальные профили дорожек кулачка, что приводит к следующим недостаткам. Исходный закон периодического движения, задаваемый профилем кулачка, искажается рычажно-кулисным контуром, упругими колебаниями звеньев и пр., в результате возникают значительные нагрузки Q > 700 Η при движении штанги вправо-влево на ход 1Så 1 = 44,5 мм при шитье книг простыми брошюрными стежками. Рассчитанные контактные напряжения s H в паре кулачок-ролик, по фактическим нагрузкам, превышают рекомендуемые значения для данных условий работы. Эти факторы обусловливают интенсивный износ дорожек кулачка, и как следствие ненадежное шитье. Как показали экспериментальные исследования, штанга с нитеводителями после перемещения вправо за крючки смещается в обратном направлении на ход d1 » 0,5 мм за счет неоптимальных параметров цикловой диаграммы и закона периодического движения. В результате этого нити петель, растянутых нитеводителями за крючки, теряют натяжение и их тр удно захватывать поднимающимся крючкам. Параметры цикловой диаграммы механизма недостаточно хорошо согласованы с перемещениями во времени механизмов каретки, крючков и качания нитеводителей. Так, у прототипа, при шитье книг переставными переплетными стежками, процесс съема петли, захваченной поднимающимися крючками, с головки нитеводителя, перемещающегося влево ненадежный, нитеводитель запаздывает с подходом к крючку. Петля задерживается на нитеводителе, находится в натянутом положении, что способствует де формации крючка, т.к. он не жесткий, а также износу рабочей головки нитеводителя. Согласно данных таблицы 1 у прототипа поздно начинается движение штанги на рабочих участках, малы угловые протяженности 1П 2, 1П 4 рабочих участков первой дорожки. Вторая дорожка кулачка имеет пять рабочих участков, параметры 2 jнп , 2П n, 2Så n также неоптимальные. В основу изобретения поставлена задача усовершенствования механизма продольного перемещения штанги нитеводителей за счет изменения профилей 2-х дорожек пространственного кулачка, в результате чего значительно снижаются динамические нагрузки в механизме, достигается более согласованное взаимодействие механизмов швейного аппарата в процессе петлеобразования и за счет этого повышается долговечность и надежность механизма. Поставленная задача решается тем, что в механизме для продольного перемещения штанги с нитеводителями ниткошвейной машины, состоящем из рычага, установленного на корпусе машины и имеющего поворотную вилку с фиксатором, и кулачка, установленного на вспомогательном валу, причем штанга размещена в направляющих качающегося стола и имеет ролик, взаимодействующий с вилкой рычага, который имеет два отверстия для установки ролика длявзаимодействия с одной из двух дорожек кулачка, имеющих постоянные и сопрягаемые с ними криволинейные - рабочие участки, на которых текущие линейные протяженности LT1,2, измеряемые от правого торца кулачка до их центральных осей и соответствующие им координатные углы y T 1, 2 , отсчитываемые от начальной угловой координаты y H0 в направлении против часовой стрелки - переменны и обеспечивают перемещение штанги вправо-влево на хода NSå n , причем каждый рабочий участок дорожек имеет начальную угловую координату Ny Нn , угловую протяженность N Фn и параметр [ DL n ]max [L T 1, 2 ]max -[L T 1,1]min f (S å n , U1, a kn ) , представляющий линейную протяженность рабочего участка в = = направлении. параллельном LT1,2, где U 1 - переменное передаточное число рычажного контура привода, akn инвариант перемещений, 1S å 3 = 1S å 4 = 1S å 5 = 2Så 3 » 44,5 мм - хода штанги на рабочих участках, N = 1 для первой и N= 2 - для второй дорожки, причем рабочие участки, кроме 2 и 4 первой, а также 2 и 5 второй дорожки образованы кривыми, обеспечивающими движение штанги по закону периодического движения диаграмма ускорений - косинусоида, согласно изобретению, первая дорожка имеет пять, а 2-я -шесть рабочих участков, для которых Ny Нn и NФn определяются из интервалов: и линейные хода штанги NSå n на некоторых участках, для расчета 1-LT1,2 также определяются из интервалов: причем 2-й и 4-й рабочие участки первой дорожки и 2-й и 5-й участки второй дорожки образованы кривыми, которые обеспечивают движение штанги по закону периодического движения - диаграммы ускорений -синусоида. Совокупность существенных признаков изобретения позволяет получить следующий технический результат. 1. Изменения линейных ходов штанги NSå n , а также начальных угловы х координат Ny Нn и угло вых протяженностей N Фn рабочих участков и их количества позволяют уменьшить динамические нагрузки в механизме, исключить столкновение нитеводителей с крючками и обеспечить одинаковые условия для съема петель с нитеводителей при шитье книг простыми брошюрными и переставными переплетными стежками. 2. Выполнение профилей 2 и 4 рабочих участков 1-й дорожки, а также 2 и 5 участков 2-й дорожки кривыми, которые обеспечивают перемещение штанги по закону периодического движения - диаграмма ускорения синусоида, позволяют уменьшить амплитуды колебаний штанги на выстоях. Т.о. совокупность существенных признаков изобретения позволяет добиться более согласованного взаимодействия штанги нитеводителей с швейной кареткой, механизмом нитепровода и др., исключить потерю натяжения нитей петель, а также исключить значительного натяжения нитей, и в результате этого повысить надежность работы механизма. Изобретение иллюстрируется следующими чертежами: Фиг. 1. С хема механизма продольного перемещения штанги с нитеводителями ниткош-вейной машины. Фиг. 2. С хема механизма продольного перемещения штанги с нитеводителями, вид сверху (расчетная схема). Фиг. 3,4. С хема расположения швейных инструментов при различных видах ши тья. Фиг. 5. Констр уктивная схема пространственного кулачка. Фиг. 6. С хема развертки профиля кулачка. Фиг. 7. Цикловая диаграмма механизма продольного перемещения штанги с нитеводителями предлагаемого устройства. Фиг. 8, 9. Ускорения штанги нитеводителей: 8 - при шитье простыми брошюрными стежками; 9 - при шитье переставными переплетными стежками. Пунктирная линия - для прототипа, сплошная линия - для предлагаемого устройства. Фиг. 10. Осцилограммы нагрузок Q(H) на ролике кулачкового механизма. Фиг. 11. Контактные напряжения в паре кулачок-ролик, рассчитанные по фактическим нагрузкам. Фиг. 12 и 13. Схемы взаимодействия нитеводителя с иглой и крючком: Фиг. 12. Ход штанги - вправо. Фиг. 13. Ход штанги - влево. Фиг. 14. Перемещения механизмов швейного аппарата при шитье. Фиг. 15. Цикловая диаграмма механизмов швейного аппарата. Схема механизма изображена на фиг. 1 и 2. Ме ханизм содержит штангу 1 с нитеводителями 2, размещенную в направляющих качающегося стола 3. На штанге установлен ролик 4, взаимодействующий с поворотной вилкой 5, соединенной с рычагом 6. Рычаг 6 установлен на станине под углом a 1 = 30° к вертикали. На рычаге 6 имеются два отверстия. в одно из которых устанавливается ролик 7 для взаимодействия с одной из двух криволинейных дорожек, выполненных на наружном ободе кулачка 8. Кулачок 8 установлен на промежуточном валу 9, который посредством зубчатой пары 10, 11 с передаточным числом И 3 = 2 кинематически связан с главным валом 12, установленном на подшипниках в корпусе машины. При этом рычаг 6, вилка 5, ролик 4 и штанга 1 представляют рычажно-кулисный контур комбинированного привода нитеводителей. На фиг. 3 изображена схема расположения швейных инструментов: игл крючков, нитеводителей в качающемся столе, показаны хода нитеводителей: фиг. 3 - при шитье книг простыми брошюрными и переплетными стежками; фиг. 4 - переставными переплетными стежками при использовании предлагаемого устройства. Приняты следующие обозначения параметров и их численные значения: L1 = 47,5 мм - расстояние между крючками: І1 = 19 мм - длина внутреннего стежка, при шитье простыми, брошюрными и переплетными стежками, или расстояние между крючками и иглой; І3 = 9,5 мм - длина наружного зигзагообразного стежка, или перемещение иглы при простом переплетном шитье; І4 = I1 + І 3 = 28,5 мм - длина внутреннего стежка при шитье простыми переплетными стежками; І5 = 16,5 мм - расстояние между осями нитеводителя и иглы, при шитье простыми брошюрными стежками; S1 = 7 мм - расстояние между осями нитеводителя и иглы, при шитье простыми переплетными стежками; S2 = 9 мм - расстояние между осями нитеводителя и крючка, при заходе нитеводителя за крючок для всех видов шитья; 7 < 1Så 1 = 2Så 1 < 90,5 мм - интервал линейного перемещения нитеводителей на 1-м рабочем участке 1-й и 2-й дорожек. В прототипе этого хода нет. В предлагаемом устройстве этот ход введен для того, чтобы сократить перемещение нитеводителей на втором рабочем участке и тем самым снизить ускорения и динамические нагрузки. При введении этого хода, уменьшаются перемещения нитеводителей на 2 и др. рабочих участках и могут назначаться из следующего интервала: что также способствуе т уменьшению динамических нагрузок и повышению долговечности дорожек. Хода нитеводителей на остальных участках могут назначаться из следующи х интервалов: Цикловая диаграмма механизма изображена на фиг. 6, основные параметры цикловой диаграммы NjНn , N П n, NSå n , для аналога, прототипа и предлагаемого устройства приведены в таблице 1, где N = 1 для первой дорожки, N = 2 - для второй дорожки; обозначения параметров расшифрованы ранее. Цикловая диаграмма характеризует движение штанги нитеводителей, увязана с кинематической схемой и размерами звеньев механизма, а также с движениями других механизмов швейного аппарата; качающегося стола, швейной каретки, поворота крючков, качания нитеводителей, нитепровода, фиг. 15. Первая дорожка кулачка обеспечивает перемещение штанги при шитье книг простыми брошюрными и переплетными стежками, а 2-я дорожка - перемещение штанги при шитье книг переставными переплетными стежками. В синтезированной цикловой диаграмме, фиг. 7, изменены параметры NjНn , N П n которые расшифрованы выше и представлены в таблице 1. Ме ханизм работает следующим образом: При шитье книг простыми брошюрными стежками центральная ось нитеводителя удалена от оси иглы на величину I5 ·= 16,5 мм, а при шитье книг простыми переплетными стежками на величину S1=7 мм, т.к. при 2-м обороте главного вала игла перемещается к нитеводителю на ход I3=9,5 мм. Поэтому чтобы уменьшить перемещение штанги на 2 рабочем участке введен дополнительный ход штанги, фиг. 3 72 мм (при ji =255o; ΔS2=2,5мм); - согласовать движение штанги с подъемом каретки, исключить потерю натяжения нитей петель, а также недопуетить значительного натяжения нитей петель, чтобы не подвергать остаточным деформациям крючки; - исключить возможность столкновения нитеводителей с крючками при возникновении зазоров в кинематических парах механизмов швейного аппарата. Окончательные параметры цикловой диаграммы назначены после расчета и анализа вариантов: 1 jH3 = 255°, 1П 3= 40°; ЗПД-диаграмма ускорений - косинусоида. На фиг. 13 показано, что когда носик нитеводителя подходит к оси крючка, зазор между вершиной нитеводителя и острия крючка составляет Δ1 = 0,4-0,6 мм, т.е. нитеводители не столкнутся с крючками, что повышает надежность устройства в процессе длительной эксплуатации. На фиг. 8, 9 показаны ускорения штанги нитеводителей 1, 2, 3 для трех участков движения; пунктирной линией для прототипа, сплошной линией - для предлагаемого устройства. Ускорения на всех участках снижены, что позволяет снизить динамические нагрузки, повысить долговечность кулачка. При шитье книг простыми переплетными стежками при 1-м обороте главного вала; штанга совершает движения такие же, как и при шитье простыми брошюрными стежками. При 2-м обороте главного вала, швейные иглы перемещаются влево на ход I3=9,5 мм, а штанга перемещается вправо-влево на ход 1S å 4 = 1S å 5 =44,5 мм. При определении параметров цикловой диаграммы, удовлетворялись все условия, сформированные выше. Принято: 1 jH4 = 200°: 1П 4 = 44°; 1 jH5 =255°; 1П 5=40°. ЗПД на этих участках: на 4-м диаграмма ускорений (ДУ) синусоида, на 5-м - диаграмма ускорений - косинусоида. На фиг. 12 показаны в скобках углы встречи нитеводителя с иглой и крючком. На фиг. 9 ускорение штанги 4, 5 на этих участках движения. При шитье книг переставными переплетными стежками при 1-м обороте главного вала штанга совершает такие же движения, как при шитье простыми брошюрными стежками, поэтому и имеет аналогичные параметры цикловой диаграммы. При 2-м обороте главного вала штанга перемещается вправо-влево-вправо на хода: 2Så 4 = 16мм, 2Så 5 =37мм, 2Så 6 =21 мм. При движении штанги на хода 2Så 4 и 2Så 6 она перемещается по ЗПД, ДУ - косинусоида, а при перемещении на хода 2Så 5 по ЗПД, ДУ - синусоида. Параметры цикловой диаграммы на участке 2Så 5 =37 мм, такие же как 1-й дорожки. Параметры ЦД на участке 2Så 6 =21 мм подобраны таким образом, чтобы подход нитеводителя к крючку был таким же, как при шитье книг простыми брошюрными стежками. На фиг. 14 показаны перемещения каретки и нитеводителей, точка 9 характеризует совмещение осей крючка и нитеводителя при шитье различными видами швов. При определении параметров цикловой диаграммы удовлетворялись также все выше сформулированные требования. Параметры ЦД приведены в таблице 1. Пример конкретного выполнения кулачка. Схема механизма изображена на фиг. 1. На фиг. 2 показана расчетная схема механизма, на которой даны обозначения геометрических параметров. Принимаем следующие обозначения и терминологию: ji = 0,1,3,... Ф n - задаваемые приращения угловой протяженности Фn; е1 - линейная протяженность от центра вала рычага до центральной оси вилки для положения кулачка, определяемого координатой y H0 ; R1 - расстояние от центра вала кулачка до центра ролика рычага; SHn - начальное (расчетное) положение штанги на рабочем участке; R2 = D2/2 - наружный радиус цилиндрического обода кулачка; a o - 90° - расчетный угол излома рычага; а2-минимальное расстояние между дорожками кулачка; Lo - линейная (рассчетная) протяженность от правого торца кулачка до центральной оси 1-й дорожки для положения. определяемого начальной угловой координатой y H0 ; y T1 , y T2 - текущие координатные углы для текущи х линейных протяженностей LT1, LT2; b = arcsin Lo - LT1 - расчетные углы для вычисления LT1, LT2; R1 D2 - H1 - расчетный радиус; И 1 - глубина дорожки; 2 ξη - угловая поправка к координатным углам y T 1, 2 . R3 = Текущие линейные протяжности LT1,2 и соответствующие им координатные углы y T 1, 2 криволинейных рабочих участков 1-ий 2-й дорожки кулачка рассчитываются по заданному закону штанги с нитеводителями с корректировкой кинематических искажений закона, вносимых рычажно-кулисным контуром привода штанги из следующих соотношений, фиг. 2. где вспомогательные расчетные параметры определяются из следующих уравнений: для закона периодического движения (ЗПД) - диаграмма ускорений (ДУ) - косинусоида; Основные геометрические параметры дорожек приведены в таблице 2. В формуле (4) a1 - расстояние от центра вала рычага до точки контакта ролика штанги с пазом вилки, фиг. 1, 2. Начальные данные для расчета дорожек по формулам (1-11) приведены в таблице 3. Конструктивная схема кулачка показана на фиг. 5. Кулачок включает ступицу 1, которая посредством спиц 2 соединена с цилиндрическим ободом 3. На ободе нарезаны криволинейные дорожки. На кулачке имеется контрольное отверстие 4, с помощью которого кулачок фиксируется в положении, при котором его начальная угловая координата y H0 , соответствующая 0° цикловой диаграммы механизма качающегося стола (принято за 0° ЦД машины). В этом положении координата y H0 смещена от горизонтальной риски, проходящей через центр вспомогательного вала пространственного кулачка на угол 120° в направлении против поворота часовой стрелки. Причем эта риска должна совпадать с правой горизонтальной риской правого кулачка механизма качающегося стола, которая проходит через центр главного вала. Правый торец кулачка расположен ближе к корпусу машины. Условная развертка дорожек кулачка изображена на фиг. 6. Кулачки механизмов качающегося стола, каретки и др. механизмов швейного аппарата имеют при изготовлении допуски: на линейные размеры ±0,05 мм и на угловые размеры ±5’. Дорожки кулачка механизма продольного перемещения штанги с нитеводителями изготавливаются с достаточно высокой точностью: допуск на линейный размер LT1,2 составляет - ±0,05 мм, а на угловой размер y T 1, 2 - ±1'. Однако при определении экспериментальным путем реальных угловы х параметров цикловой диаграммы исполнительных механизмов отмечается разброс численных значений угловых параметров с средним до dc = ±3°, а у некоторых механизмов величина допуска составляет dm = ±5°, также выявляются погрешности в перемещении штанги. Это объясняется неточностью изготовления и сборки деталей и узлов, наличием зазоров в кинематических парах и зубчатых передачах, определенным сочетанием допусков в кинематических цепях. При работе машины на эти параметры будут влиять также эксплуатационные и температурные ошибки. Выше отмеченные погрешности кулачков каретки и др., жестко закрепленных на главном валу, компенсируются за счет угловой регулировки кулачка механизма продольного перемещения штанги с нитеводителями, который устанавливается на вспомогательном валу. С учетом выше изложенного, отличительные линейные и угловые параметры дорожек кулачка заданы в интервалах или с допусками, а не в фиксированных численных значениях.
ДивитисяДодаткова інформація
Назва патенту англійськоюMechanism for longitudinal displacement of yarn feeder bar of sewer
Автори англійськоюBoiko Anatolii Volodymyrovych, Dushkevych Yakiv Trokhymovych
Назва патенту російськоюМеханизм для продольного перемещения штанги с нитеводителем ниткошвейной машины
Автори російськоюБойко Анатолий Владимирович, Душкевич Яков Трофимович
МПК / Мітки
МПК: B42B 2/00
Мітки: ниткошвейної, нитководієм, машини, штанги, поздовжного, механізм, переміщення
Код посилання
<a href="https://ua.patents.su/14-3486-mekhanizm-dlya-pozdovzhnogo-peremishhennya-shtangi-z-nitkovodiehm-nitkoshvejjno-mashini.html" target="_blank" rel="follow" title="База патентів України">Механізм для поздовжнього переміщення штанги з нитководієм ниткошвейної машини</a>
Механізм для коливання штанг нитководів ниткошвейної машини
Номер патенту: 3108
Опубліковано: 26.12.1994
Автори: Осьмук Борис Сергійович, Бойко Анатолій Володимирович
МПК: B42B 2/00
Мітки: нитководів, коливання, ниткошвейної, машини, штанг, механізм
Формула / Реферат:
Механизм для качания штанги нитеводителей ниткошвейной машины, содержащий подвижную штангу с нитеводителями, расположенную в направляющих качающегося стола, закрепленный на штанге ролик, взаимодействующий с пазом двухплечего рычага, установленного на вспомогательном валу в корпусе машины, причем на втором плече этого рычага установлен ролик, взаимодейтствующий с пазом кулачка, закрепленного на промежуточном валу, при этом центровой профиль...
Механізм швейної каретки ниткошвейної машини
Номер патенту: 3111
Опубліковано: 26.12.1994
Автори: Бойко Анатолій Володимирович, Душкевич Яків Трохимович
МПК: B42B 2/00
Мітки: каретки, механізм, ниткошвейної, швейної, машини
Формула / Реферат:
Механизм швейной каретки ниткошвейной машины, содержащий каретку с держателями для игл и крючков, смонтированную с возможностью перемещения по направляющим, закрепленным на корпусе машины и связанную шатунами с двухплечими рычагами, установленными на вспомогательных валах, на одних плечах которых установлены ролики, взаимодействующие с одинаковыми правым и левым пазовыми кулачками, жестко закрепленными на главном валу, причем центровой...
Механізм проштовхуючої планки ниткошвейної машини
Номер патенту: 3109
Опубліковано: 26.12.1994
Автори: Бойко Анатолій Володимирович, Соколюк Леонід Миколайович
МПК: B42B 2/00
Мітки: механізм, машини, ниткошвейної, планки, проштовхуючої
Формула / Реферат:
1. Механизм проталкивающей планки ниткошвейной машины, содержащий планку, закрепленную на рычагах, шарнирно установленных на корпусе машины, причем вторые плечи этих рычагов соединены эксцентричными пальцами с шатунами, связанными с двухплечими рычагами, установленными на вспомогательных валах на корпусе машины, при этом на вторых плечах этих рычагов установлены ролики, взаимодействующие с пазами одинаковых правого и левого кулачков, жестко...
Механізм проколювальних голок ниткошвейної машини
Номер патенту: 3260
Опубліковано: 26.12.1994
Автори: Соколюк Леонід Миколайович, Бойко Анатолій Володимирович
МПК: B42B 2/00
Мітки: механізм, голок, машини, ниткошвейної, проколювальних
Формула / Реферат:
1. Механизм прокалывающих игл ниткошвейной машины, содержащий параллельно расположенные на корпусе машины главный и вспомогательные валы, жестко закрепленные на главном валу правый и левый одинаковые и зеркально установленные пазовые кулачки, взаимодействующие с роликами, смонтированными на двуплечих изогнутых рычагах, установленных на промежуточном валу, одни плечи которых посредством шатунов соединены с установленными на оси стола...
Механізм стола, що хитається, ниткошвейної машини
Номер патенту: 3110
Опубліковано: 26.12.1994
Автори: Осьмук Борис Сергійович, Бойко Анатолій Володимирович
МПК: B42B 2/00
Мітки: стола, хитається, ниткошвейної, машини, механізм
Формула / Реферат:
Механизм качающегося стола ниткошвейной машины, содержащий параллельно размещенные в опорах на корпусе машин главный и вспомогательный валы, жестко закрепленные на главном валу правый и левый одинаковые и зеркально установленные пазовые кулачки, взаимодействующие с роликами, установленными на рычагах стола, закрепленных на вспомогательном валу, при этом центровой профиль кулачка, начиная от начальной угловой координаты, содержит четыре...
Попередній патент: Пристрій для виготовлення саману
Наступний патент: Робочий орган розпушувача
Випадковий патент: Спосіб лікування загострення атеросклеротичної хвороби