Пристрій для синхронізації базової станції (варіанти), базова станція, пристрій для синхронізації генераторів синхронізуючих імпульсів базової станції, система для синхронізації генераторів синхронізуючих імпул
Номер патенту: 76087
Опубліковано: 17.07.2006
Автори: Тідеманн Едвард Г., мол., Волтон Дж. Род, Вітлі Чарльз Е. ІІІ, Воллес Марк С., Стівен Дж. Говард
Формула / Реферат
1. Пристрій для синхронізації базової станції, який включає:
засіб затримки передачі на період моніторингу;
засіб прийому сигналу безпровідного зв'язку протягом періоду моніторингу; та засіб регулювання внутрішнього генератора синхронізуючих імпульсів цієї базової станції згідно зі зазначеним сигналом безпровідного зв'язку.
2. Пристрій за п. 1, в якому зазначений сигнал безпровідного зв'язку прийнятий у смузі частот прямого каналу, а зазначена базова станція включає:
засіб прийому сигналів зворотного каналу на частоті зворотного каналу, яка відрізняється від смуги частот прямого каналу.
3. Пристрій за п. 1, в якому зазначена базова станція додатково включає:
підсистему приймача зворотного каналу для прийому сигналів у смузі частот зворотного каналу;
підсистему приймача прямого каналу для прийому сигналів у смузі частот прямого каналу;і
засіб регулювання синхронізації для регулювання зазначеного внутрішнього генератора синхронізуючих імпульсів згідно з зазначеними прийнятими сигналами прямого каналу.
4. Пристрій за п. 3, в якому зазначена базова станція додатково включає:
підсистему передачі у прямому каналі для передачі сигналу у зазначеній смузі частот прямого каналу.
5. Пристрій за п. 4, в якому зазначена базова станція додатково включає:
перемикач для припинення передачі у зазначеній підсистемі передачі у прямому каналі, поки зазначений приймач прямого каналу приймає сигнали.
6. Базова станція, яка включає
підсистему приймача зворотного каналу для прийому сигналів у смузі частот зворотного каналу;
підсистему приймача прямого каналу для прийому сигналів у смузі частот прямого каналу;
перемикач для припинення передачі у зазначеній підсистемі передачі у прямому каналі поки зазначений приймач прямого каналу приймає сигнали через зазначену смугу частот прямого каналу ; та
засіб регулювання синхронізації для регулювання внутрішнього генератора синхронізуючих імпульсів згідно з зазначеними прийнятими сигналами прямого каналу.
7. Базова станція за п. 6, в якій зазначена базова станція додатково включає:
підсистему передачі у прямому каналі для передачі сигналу у зазначеній смузі частот прямого каналу.
8. Базова станція за п. 7, в якій зазначений сигнал прийнятий у зазначеній смузі частот прямого каналу є мультиплексованим сигналом з кодовим розділенням каналів.
9. Пристрій для синхронізації базової станції, який включає:
засіб прийому сигналу безпровідного зв'язку у смузі частот зворотного каналу протягом періоду синхронізації;
засіб припинення прийому у смузі частот зворотного каналу;
засіб передачі сигналу безпровідного зв'язку у зворотному каналі, адаптованого для використання у синхронізації інших базових станцій, поки припинено прийом зазначеного сигналу безпровідного зв'язку, та
засіб для передачі зв'язку у смузі частот прямого каналу.
10. Пристрій за п. 9, який додатково включає:
підсистему передачі у прямому каналі для передачі сигналів у смузі частот прямого каналу;
підсистему прийому у зворотному каналі для прийому сигналів у смузі частот зворотного каналу; та
підсистему передавача зворотного каналу для передачі зазначеного сигналу безпровідного зв'язку у зазначеній смузі частот зворотного каналу.
11. Пристрій за п. 10, який додатково включає:
перемикач для припинення прийому сигналів у зазначеній смузі частот зворотного каналу, поки передавач зворотного каналу веде передачу у зазначеній смузі частот зворотного каналу;
12. Пристрій для синхронізації генератора синхронізуючих імпульсів базової станції, який включає:
засіб прийому сигналу безпровідного зв'язку протягом заздалегідь заданого періоду часу; та
засіб регулювання генератора синхронізуючих імпульсів базової станції, базуючись на часі надходження зазначеного сигналу безпровідного зв'язку.
13. Базова станція, яка включає:
підсистему передачі у прямому каналі для передачі сигналів у смузі частот прямого каналу;
підсистему прийому у зворотному каналі для прийому сигналів у смузі частот зворотного каналу; і
підсистему передавача зворотного каналу для передачі зазначеного сигналу безпровідного зв'язку у зазначеній смузі частот зворотного каналу.
14. Базова станція за п. 13, яка додатково включає:
перемикач для припинення прийому сигналів у зазначеній смузі частот зворотного каналу, поки зазначений передавач зворотного каналу веде передачу у зазначеній смузі частот зворотного каналу.
15. Система для синхронізації генераторів синхронізуючих імпульсів першої і другої базових станцій, яка включає:
тимчасову станцію для прийому першого сигналу безпровідного зв'язку від першої базової станції, для прийому другого сигналу безпровідного зв'язку від другої базової станції і для генерування сигналу, що вказує на синхронізацію зазначених першої і другої базових станцій.
16. Система за п. 15, в якій тимчасова станція має додаткове призначення передавати зазначений сигнал, що вказує на синхронізацію зазначених першої і другої базових станцій.
17. Система за п. 16, в якій зазначена тимчасова станція генерує зазначений сигнал, що вказує на синхронізацію зазначених першої і другої базових станцій, згідно з фазою зазначених першого і другого сигналів безпровідного зв'язку.
18. Система за п. 16, в якій зазначені перший і другий сигнали безпровідного зв'язку є сигналами багатостанційного доступу з кодовим розділенням каналів.
19. Система за п. 18, в якій зазначена тимчасова станція визначає фазовий зсув псевдошумового розширення зазначених першого і другого сигналів безпровідного зв'язку, причому зазначений сигнал, що вказує на синхронізацію зазначеної першої базової станції і синхронізацію зазначеної другої базової станції визначається згідно з фазовим зсувом псевдошумового розширення зазначеного першого сигналу безпровідного зв'язку і зазначеного другого сигналу безпровідного зв'язку.
20. Система для синхронізації генераторів синхронізуючих імпульсів першої і другої базових станцій, яка включає:
тимчасову станцію для передачі сигналу безпровідного зв'язку;
першу базову станцію для прийому зазначеного сигналу безпровідного зв'язку, для обчислення часу надходження зазначеного сигналу безпровідного зв'язку на зазначеній першій базовій станції і для надсилання повідомлення до центрального контролера, що вказує час надходження зазначеного сигналу безпровідного зв'язку на зазначеній першій базовій станції;
другу базову станцію для прийому зазначеного сигналу безпровідного зв'язку, для обчислення часу надходження зазначеного сигналу безпровідного зв'язку на зазначеній першій базовій станції і для надсилання повідомлення до центрального контролера, що вказує час надходження зазначеного сигналу безпровідного зв'язку на зазначеній другій базовій станції; і
центральний контролер для генерування повідомлення про регулювання синхронізації згідно з зазначеним повідомленням про час надходження зазначеного сигналу безпровідного зв'язку, і зазначеного повідомлення про час надходження зазначеного сигналу безпровідного зв'язку на другій базовій станції, і для передачі зазначеного повідомлення про регулювання синхронізації до зазначеної першої базової станції.
21. Спосіб синхронізації генераторів синхронізуючих імпульсів першої і другої базових станцій, який включає:
прийом першого сигналу безпровідного зв'язку від першої базової станції;
прийом другого сигналу безпровідного зв'язку від другої базової станції; та передачу індикаційного сигналу, який вказує на синхронізацію зазначених першої й другої базових станцій.
22. Спосіб за п. 21, який додатково включає:
генерування зазначеного індикаційного сигналу згідно з фазою зазначених першого і другого сигналів безпровідного зв'язку.
23. Спосіб за п. 22, в якому зазначені перший і другий сигнали безпровідного зв'язку є сигналами багатостанційного доступу з кодовим розділенням каналів.
24. Спосіб за п. 23, який додатково включає:
визначення фазового зсуву псевдошумового розширення зазначеного першого сигналу безпровідного зв'язку,
визначення фазового зсуву псевдошумового розширення зазначеного другого сигналу безпровідного зв'язку, та
визначення індикаційного сигналу згідно з фазовим зсувом псевдошумового розширення зазначених першого і другого сигналів безпровідного зв'язку.
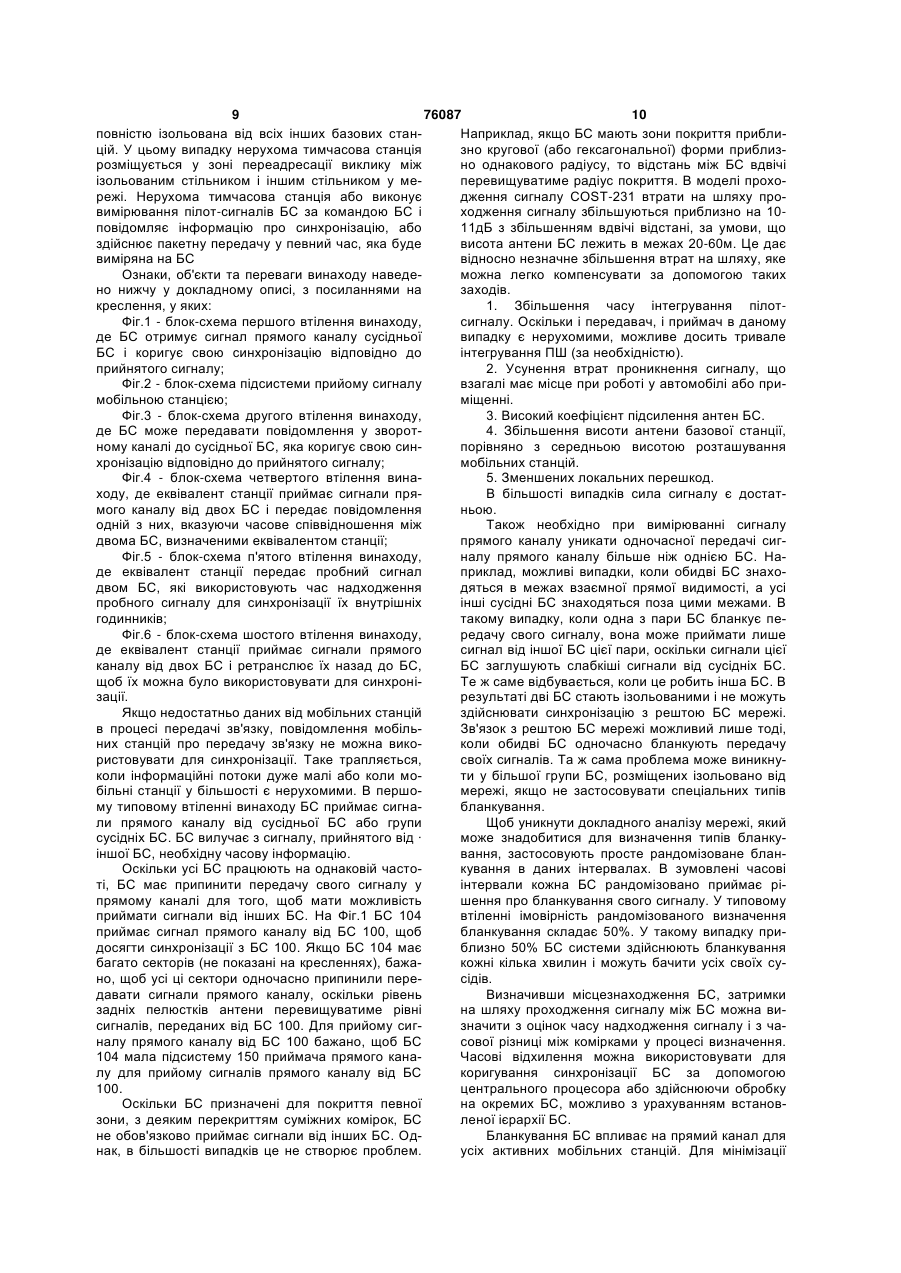
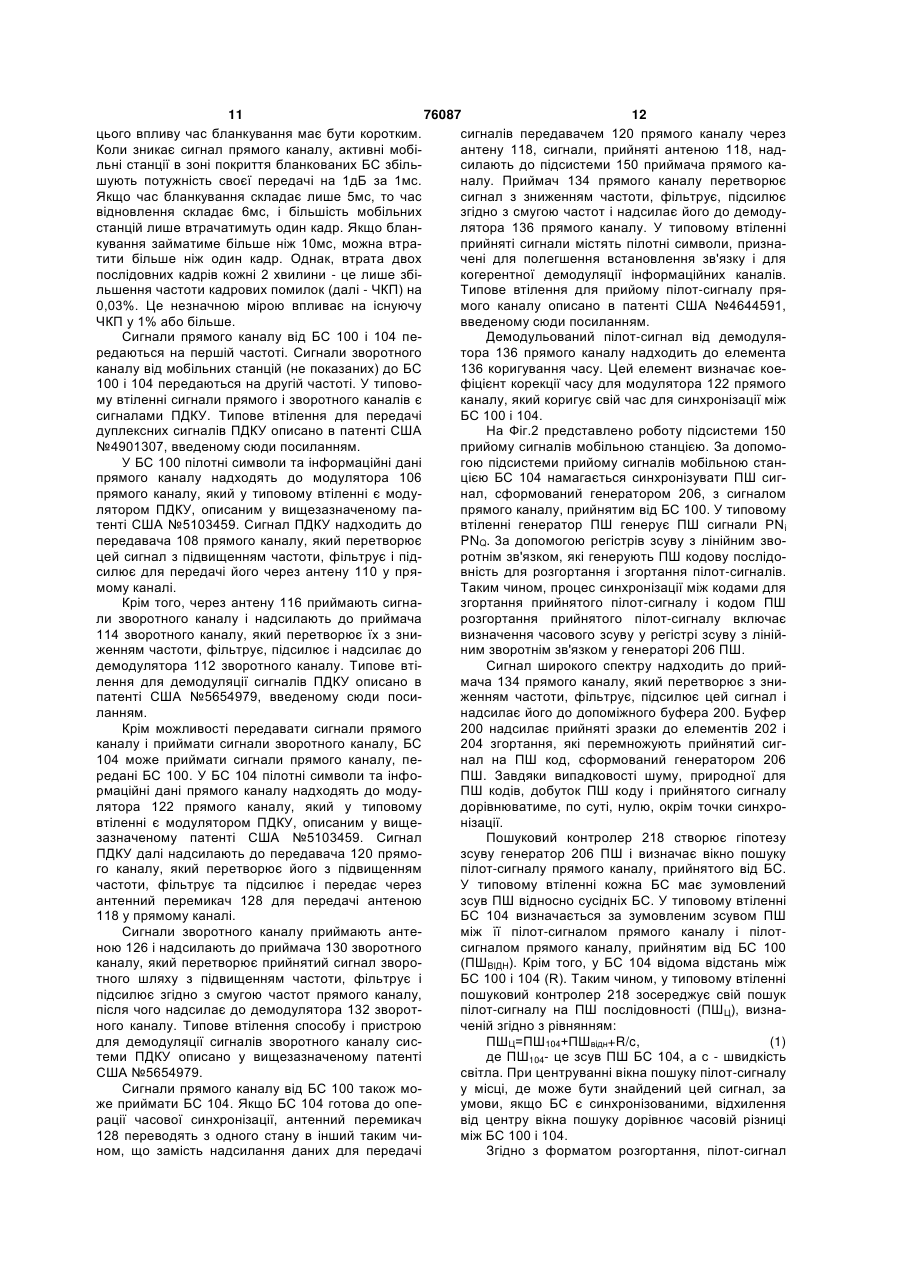
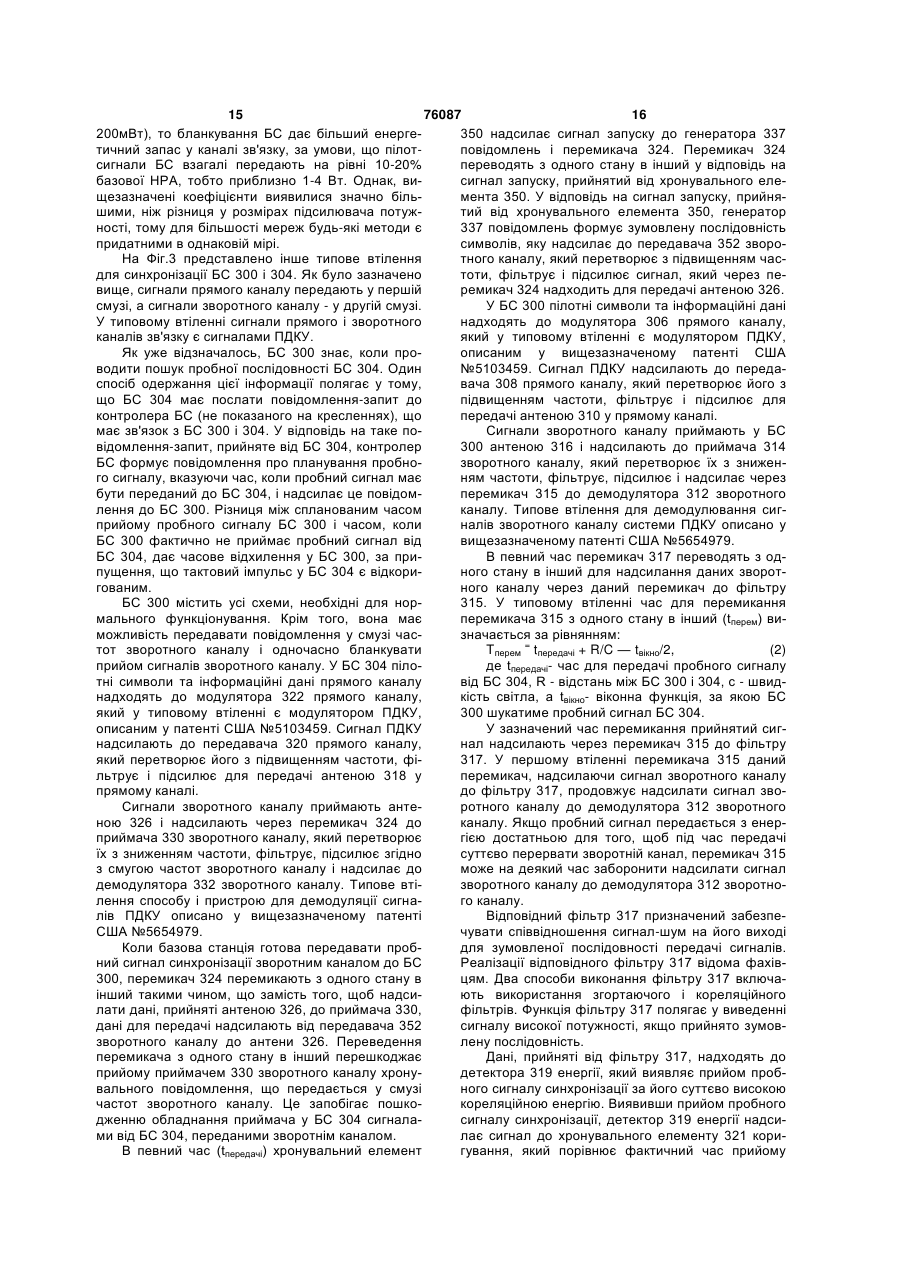
Текст
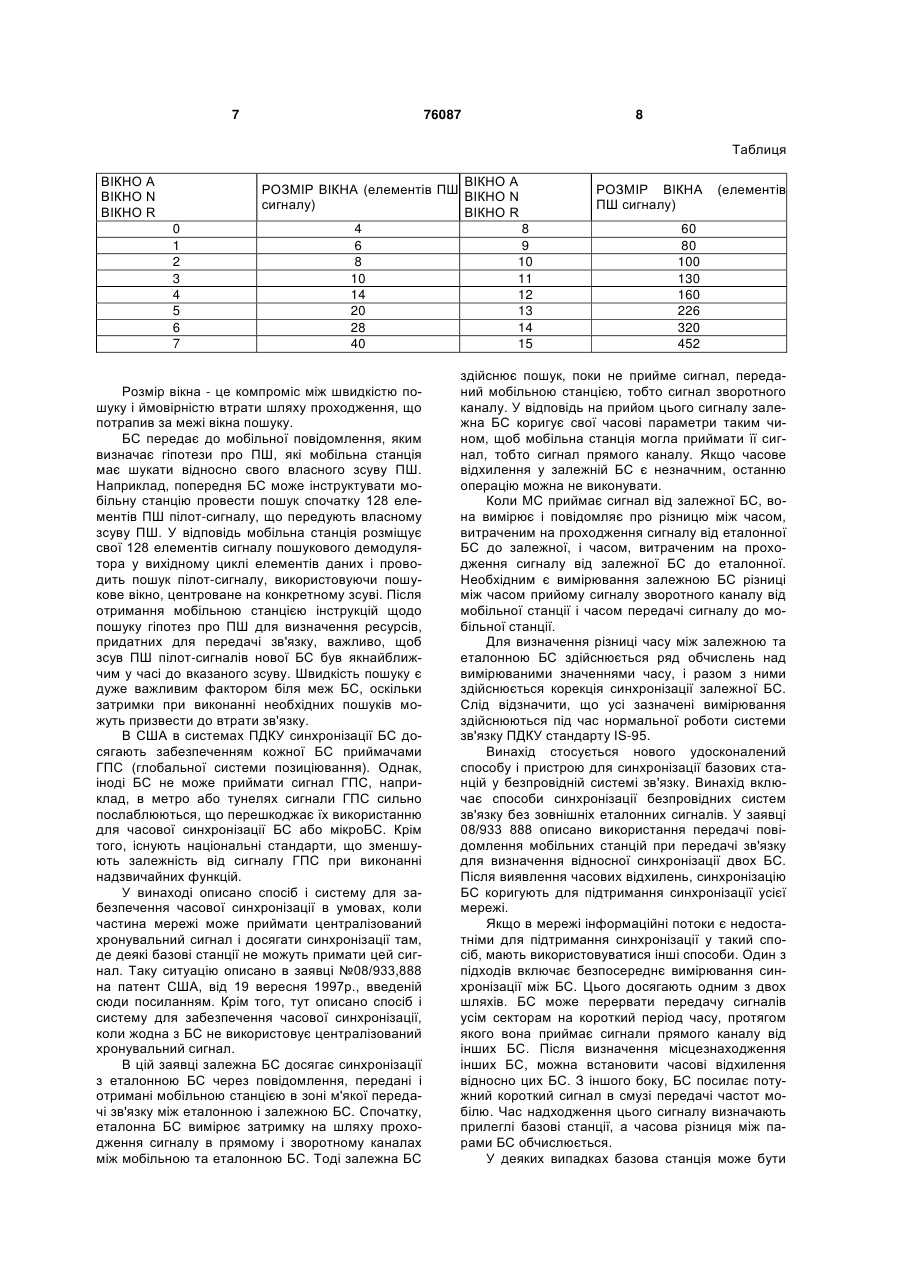
1. Пристрій для синхронізації базової станції, який включає: засіб затримки передачі на період моніторингу; засіб прийому сигналу безпровідного зв'язку протягом періоду моніторингу; та засіб регулювання внутрішнього генератора синхронізуючих імпульсів цієї базової станції згідно зі зазначеним сигналом безпровідного зв'язку. 2. Пристрій за п. 1, в якому зазначений сигнал безпровідного зв'язку прийнятий у смузі частот прямого каналу, а зазначена базова станція включає: засіб прийому сигналів зворотного каналу на частоті зворотного каналу, яка відрізняється від смуги частот прямого каналу. 3. Пристрій за п. 1, в якому зазначена базова станція додатково включає: підсистему приймача зворотного каналу для прийому сигналів у смузі частот зворотного каналу; підсистему приймача прямого каналу для прийому сигналів у смузі частот прямого каналу;і засіб регулювання синхронізації для регулювання зазначеного внутрішнього генератора синхронізуючих імпульсів згідно з зазначеними прийнятими сигналами прямого каналу. 2 (19) 1 3 76087 4 засіб для передачі зв'язку у смузі частот прямого що вказує на синхронізацію зазначеної першої каналу. базової станції і синхронізацію зазначеної другої 10. Пристрій за п. 9, який додатково включає: базової станції визначається згідно з фазовим підсистему передачі у прямому каналі для передазсувом псевдошумового розширення зазначеного чі сигналів у смузі частот прямого каналу; першого сигналу безпровідного зв'язку і зазначепідсистему прийому у зворотному каналі для приного другого сигналу безпровідного зв'язку. йому сигналів у смузі частот зворотного каналу; та 20. Система для синхронізації генераторів синхропідсистему передавача зворотного каналу для нізуючих імпульсів першої і другої базових станцій, передачі зазначеного сигналу безпровідного зв'язяка включає: ку у зазначеній смузі частот зворотного каналу. тимчасову станцію для передачі сигналу безпрові11. Пристрій за п. 10, який додатково включає: дного зв'язку; перемикач для припинення прийому сигналів у першу базову станцію для прийому зазначеного зазначеній смузі частот зворотного каналу, поки сигналу безпровідного зв'язку, для обчислення передавач зворотного каналу веде передачу у часу надходження зазначеного сигналу безпровідзазначеній смузі частот зворотного каналу; ного зв'язку на зазначеній першій базовій станції і 12. Пристрій для синхронізації генератора синхродля надсилання повідомлення до центрального нізуючих імпульсів базової станції, який включає: контролера, що вказує час надходження зазначезасіб прийому сигналу безпровідного зв'язку проного сигналу безпровідного зв'язку на зазначеній тягом заздалегідь заданого періоду часу; та першій базовій станції; засіб регулювання генератора синхронізуючих другу базову станцію для прийому зазначеного імпульсів базової станції, базуючись на часі надсигналу безпровідного зв'язку, для обчислення ходження зазначеного сигналу безпровідного зв'ячасу надходження зазначеного сигналу безпровідзку. ного зв'язку на зазначеній першій базовій станції і 13. Базова станція, яка включає: для надсилання повідомлення до центрального підсистему передачі у прямому каналі для передаконтролера, що вказує час надходження зазначечі сигналів у смузі частот прямого каналу; ного сигналу безпровідного зв'язку на зазначеній підсистему прийому у зворотному каналі для придругій базовій станції; і йому сигналів у смузі частот зворотного каналу; і центральний контролер для генерування повідомпідсистему передавача зворотного каналу для лення про регулювання синхронізації згідно з запередачі зазначеного сигналу безпровідного зв'яззначеним повідомленням про час надходження ку у зазначеній смузі частот зворотного каналу. зазначеного сигналу безпровідного зв'язку, і за14. Базова станція за п. 13, яка додатково вклюзначеного повідомлення про час надходження чає: зазначеного сигналу безпровідного зв'язку на друперемикач для припинення прийому сигналів у гій базовій станції, і для передачі зазначеного позазначеній смузі частот зворотного каналу, поки відомлення про регулювання синхронізації до зазазначений передавач зворотного каналу веде значеної першої базової станції. передачу у зазначеній смузі частот зворотного 21. Спосіб синхронізації генераторів синхронізуюканалу. чих імпульсів першої і другої базових станцій, який 15. Система для синхронізації генераторів синхровключає: нізуючих імпульсів першої і другої базових станцій, прийом першого сигналу безпровідного зв'язку від яка включає: першої базової станції; тимчасову станцію для прийому першого сигналу прийом другого сигналу безпровідного зв'язку від безпровідного зв'язку від першої базової станції, другої базової станції; та передачу індикаційного для прийому другого сигналу безпровідного зв'язку сигналу, який вказує на синхронізацію зазначених від другої базової станції і для генерування сигнапершої й другої базових станцій. лу, що вказує на синхронізацію зазначених першої 22. Спосіб за п. 21, який додатково включає: і другої базових станцій. генерування зазначеного індикаційного сигналу 16. Система за п. 15, в якій тимчасова станція має згідно з фазою зазначених першого і другого сигдодаткове призначення передавати зазначений налів безпровідного зв'язку. сигнал, що вказує на синхронізацію зазначених 23. Спосіб за п. 22, в якому зазначені перший і першої і другої базових станцій. другий сигнали безпровідного зв'язку є сигналами 17. Система за п. 16, в якій зазначена тимчасова багатостанційного доступу з кодовим розділенням станція генерує зазначений сигнал, що вказує на каналів. синхронізацію зазначених першої і другої базових 24. Спосіб за п. 23, який додатково включає: станцій, згідно з фазою зазначених першого і друвизначення фазового зсуву псевдошумового розгого сигналів безпровідного зв'язку. ширення зазначеного першого сигналу безпровід18. Система за п. 16, в якій зазначені перший і ного зв'язку, другий сигнали безпровідного зв'язку є сигналами визначення фазового зсуву псевдошумового розбагатостанційного доступу з кодовим розділенням ширення зазначеного другого сигналу безпровідканалів. ного зв'язку, та 19. Система за п. 18, в якій зазначена тимчасова визначення індикаційного сигналу згідно з фазостанція визначає фазовий зсув псевдошумового вим зсувом псевдошумового розширення зазначерозширення зазначених першого і другого сигналів них першого і другого сигналів безпровідного зв'ябезпровідного зв'язку, причому зазначений сигнал, зку. 5 Винахід стосується систем зв'язку, зокрема нового та удосконаленого способу і пристрою для синхронізації базових станцій (надалі - БС) у безпровідній системі зв'язку. Використання модуляції для паралельного доступу з кодовим ущільненням каналів (ПДКУ) є одним з кількох методів здійснення зв'язку у системах з великою кількістю користувачів. Хоча відомі й інші методи, наприклад, ПДЧУ, ПДЧУ1 і системи AM, наприклад, АКОБС, ПДКУ має значні переваги над цими методами. Використання методу ПДКУ в системі зв'язку з паралельним доступом описано в патенті США №4901307 і в патенті США №5103459, включених сюди посиланням. Мобільний зв'язок з ПДКУ був стандартизований в США Асоціацією зв'язку стандартом TIA/ELA/IS-95A "Mobile Station-Base Station Compatibility Standard for Dual-mode Wideband Spread Spectrum Cellular System (Стандарт сумісності мобільних і БС для широкосмугових систем двостороннього зв'язку розширеного спектру)", надалі скорочено IS-95. У вищезазначених патентах описано метод паралельного доступу, при якому велика кількість користувачів мобільної станції, кожен з яких має засіб прийому-передачі і передає сигнали через супутникові ретранслятори або наземні БС (також відомі як БС-комірки або комірки), використовуючи сигнали ПДКУ розширеного спектру. Використовуючи систему зв'язку з ПДКУ, спектр частот можна використовувати багато разів, збільшуючи таким чином користувацьку ємність системи. Використання методу ПДКУ значно збільшує спектральну ефективність порівняно з іншими методами паралельного доступу. Спосіб одночасної демодуляції даних, що проходять різними шляхами від однієї БС і одночасної демодуляції даних, які в надлишковій кількості надходять від більш ніж однієї БС, описано в патенті США №5109390, включеному сюди посиланням. Згідно з цим патентом окремо демодульовані сигнали об'єднують для оцінювання переданих даних, що дає більш надійну оцінку, ніж для даних, що надійшли будь-яким одним шляхом або від будь-якої однієї БС. Передачу зв'язку взагалі можна розділити на дві категорії: жорстка і м'яка передача зв'язку. При жорсткій передачі зв'язку, коли мобільна станція залишає попередню БС і входить до нової, вона припиняє свій зв'язок з попередньою БС, після чого встановлює зв'язок з новою БС. При м'якій передачі зв'язку мобільна станція завершує встановлення зв'язку з новою БС до припинення свого зв'язку з попередньою. Таким чином, при м'якій передачі зв'язку мобільна станція встановлює надлишковий зв'язок з обома БС протягом деякого періоду часу. Втрата зв'язку при м'якій передачі зв'язку є менш ймовірним, ніжпри жорсткій. Крім того, коли мобільна станція проходить уздовж межі покриття БС, вона може неодноразово здійснювати передачу зв'язку у відповідь на незначні зміни в навколи 76087 6 шньому середовищі. Цю незручність, що має назву "пінг-понг" можна також значно зменшити м'якою передачею. Типовий спосіб здійснення м'якої передачі докладно описано в патенті США №5101501, включеному сюди посиланням. Удосконалений спосіб здійснення м'якої передачі зв'язку описано в патенті США №5267261, включеному сюди посиланням. В системі, що описана у цьому патенті, спосіб здійснення м'якої передачі удосконалено вимірюванням інтенсивності пілот-сигналів, переданих кожною БС до мобільної станції. Такі вимірювання інтенсивності пілотсигналів сприяють здійсненню м'якої передачі, полегшуючи ідентифікацію придатних БС - кандидатів для передачі зв'язку. Таких кандидатів можна розділити на чотири групи. До першої (Активної) групи входять БС, які постійно мають зв'язок з мобільною станцією. До другої (Кандидатської) групи входять БС, сигнали яких, як було визначено, мають достатню ефективність для передачі їх до мобільної станції, але не використовуються. БС приєднують до Кандидатської групи тоді, коли їх виміряна енергія пілотсигналів перевищує заздалегідь встановлений поріг TADD. Третю групу складають БС, що знаходяться по сусідству з мобільною станцією, але не входять до Активної або Кандидатської груп. До четвертої Залишкової групи входять решта БС. В стандарті IS-95 БС-кандидат характеризується фазовим зсувом псевдошумової послідовності її пілот-сигналу. Коли мобільна станція здійснює пошук для вимірювання інтенсивності пілотсигналу від БС-кандидата, вона виконує операцію кореляції, причому профільтрований прийнятий сигнал корелюють за гіпотезою про зсув ПШ. Спосіб і пристрій для виконання операції кореляції детально описано в патенті США №5644591, введеному сюди посиланням. Затримки на шляху проходження сигналу від базової станції до мобільної є невідомими. Невідома затримка викликає невідомий зсув ПШ кодів. Проведенням пошуку намагаються визначити невідомий зсув ПШ кодів. Для цього МС зсуває у часі виходи її пошукових генераторів ПШ кодів. Діапазон пошуку зсуву називають вікном пошуку і розташовують центрально відносно гіпотез зсуву ПШ. БС передає до мобільної станції повідомлення про зсуви ПШ пілот-сигналів фізично близьких до БС. Мобільна станція розташовує своє вікно пошуку центрально відносно гіпотез зсуву ПШ. Придатний розмір вікна пошуку залежить від декількох факторів, включаючи пріоритет пілотсигналу, швидкість пошукових процесорів і передбачуваний розкид затримок при надходженні сигналу багатьма шляхами. На основі стандартів ПДКУ визначено три параметри вікна пошуку. Пошук пілот-сигналів Активної і Кандидатської груп виконують у вікні "А", Сусідньої у вікні "Ν" і Залишкової - "R". Розміри пошукового вікна представлено нижче в табл.1, причому частота елементу сигналу становить 1/1.2288МГц. 7 76087 8 Таблиця ВІКНО А ВІКНО N ВІКНО R 0 1 2 3 4 5 6 7 ВІКНО А РОЗМІР ВІКНА (елементів ПШ ВІКНО N сигналу) ВІКНО R 4 8 6 9 8 10 10 11 14 12 20 13 28 14 40 15 Розмір вікна - це компроміс між швидкістю пошуку і ймовірністю втрати шляху проходження, що потрапив за межі вікна пошуку. БС передає до мобільної повідомлення, яким визначає гіпотези про ПШ, які мобільна станція має шукати відносно свого власного зсуву ПШ. Наприклад, попередня БС може інструктувати мобільну станцію провести пошук спочатку 128 елементів ПШ пілот-сигналу, що передують власному зсуву ПШ. У відповідь мобільна станція розміщує свої 128 елементів сигналу пошукового демодулятора у вихідному циклі елементів даних і проводить пошук пілот-сигналу, використовуючи пошукове вікно, центроване на конкретному зсуві. Після отримання мобільною станцією інструкцій щодо пошуку гіпотез про ПШ для визначення ресурсів, придатних для передачі зв'язку, важливо, щоб зсув ПШ пілот-сигналів нової БС був якнайближчим у часі до вказаного зсуву. Швидкість пошуку є дуже важливим фактором біля меж БС, оскільки затримки при виконанні необхідних пошуків можуть призвести до втрати зв'язку. В США в системах ПДКУ синхронізації БС досягають забезпеченням кожної БС приймачами ГПС (глобальної системи позиціювання). Однак, іноді БС не може приймати сигнал ГПС, наприклад, в метро або тунелях сигнали ГПС сильно послаблюються, що перешкоджає їх використанню для часової синхронізації БС або мікроБС. Крім того, існують національні стандарти, що зменшують залежність від сигналу ГПС при виконанні надзвичайних функцій. У винаході описано спосіб і систему для забезпечення часової синхронізації в умовах, коли частина мережі може приймати централізований хронувальний сигнал і досягати синхронізації там, де деякі базові станції не можуть примати цей сигнал. Таку ситуацію описано в заявці №08/933,888 на патент США, від 19 вересня 1997p., введеній сюди посиланням. Крім того, тут описано спосіб і систему для забезпечення часової синхронізації, коли жодна з БС не використовує централізований хронувальний сигнал. В цій заявці залежна БС досягає синхронізації з еталонною БС через повідомлення, передані і отримані мобільною станцією в зоні м'якої передачі зв'язку між еталонною і залежною БС. Спочатку, еталонна БС вимірює затримку на шляху проходження сигналу в прямому і зворотному каналах між мобільною та еталонною БС. Тоді залежна БС РОЗМІР ВІКНА ПШ сигналу) (елементів 60 80 100 130 160 226 320 452 здійснює пошук, поки не прийме сигнал, переданий мобільною станцією, тобто сигнал зворотного каналу. У відповідь на прийом цього сигналу залежна БС коригує свої часові параметри таким чином, щоб мобільна станція могла приймати її сигнал, тобто сигнал прямого каналу. Якщо часове відхилення у залежній БС є незначним, останню операцію можна не виконувати. Коли МС приймає сигнал від залежної БС, вона вимірює і повідомляє про різницю між часом, витраченим на проходження сигналу від еталонної БС до залежної, і часом, витраченим на проходження сигналу від залежної БС до еталонної. Необхідним є вимірювання залежною БС різниці між часом прийому сигналу зворотного каналу від мобільної станції і часом передачі сигналу до мобільної станції. Для визначення різниці часу між залежною та еталонною БС здійснюється ряд обчислень над вимірюваними значеннями часу, і разом з ними здійснюється корекція синхронізації залежної БС. Слід відзначити, що усі зазначені вимірювання здійснюються під час нормальної роботи системи зв'язку ПДКУ стандарту IS-95. Винахід стосується нового удосконалений способу і пристрою для синхронізації базових станцій у безпровідній системі зв'язку. Винахід включає способи синхронізації безпровідних систем зв'язку без зовнішніх еталонних сигналів. У заявці 08/933 888 описано використання передачі повідомлення мобільних станцій при передачі зв'язку для визначення відносної синхронізації двох БС. Після виявлення часових відхилень, синхронізацію БС коригують для підтримання синхронізації усієї мережі. Якщо в мережі інформаційні потоки є недостатніми для підтримання синхронізації у такий спосіб, мають використовуватися інші способи. Один з підходів включає безпосереднє вимірювання синхронізації між БС. Цього досягають одним з двох шляхів. БС може перервати передачу сигналів усім секторам на короткий період часу, протягом якого вона приймає сигнали прямого каналу від інших БС. Після визначення місцезнаходження інших БС, можна встановити часові відхилення відносно цих БС. З іншого боку, БС посилає потужний короткий сигнал в смузі передачі частот мобілю. Час надходження цього сигналу визначають прилеглі базові станції, а часова різниця між парами БС обчислюється. У деяких випадках базова станція може бути 9 76087 10 повністю ізольована від всіх інших базових станНаприклад, якщо БС мають зони покриття приблицій. У цьому випадку нерухома тимчасова станція зно кругової (або гексагональної) форми приблизрозміщується у зоні переадресації виклику між но однакового радіусу, то відстань між БС вдвічі ізольованим стільником і іншим стільником у меперевищуватиме радіус покриття. В моделі прохорежі. Нерухома тимчасова станція або виконує дження сигналу COST-231 втрати на шляху провимірювання пілот-сигналів БС за командою БС і ходження сигналу збільшуються приблизно на 10повідомляє інформацію про синхронізацію, або 11дБ з збільшенням вдвічі відстані, за умови, що здійснює пакетну передачу у певний час, яка буде висота антени БС лежить в межах 20-60м. Це дає виміряна на БС відносно незначне збільшення втрат на шляху, яке Ознаки, об'єкти та переваги винаходу наведеможна легко компенсувати за допомогою таких но нижчу у докладному описі, з посиланнями на заходів. креслення, у яких: 1. Збільшення часу інтегрування пілотФіг.1 - блок-схема першого втілення винаходу, сигналу. Оскільки і передавач, і приймач в даному де БС отримує сигнал прямого каналу сусідньої випадку є нерухомими, можливе досить тривале БС і коригує свою синхронізацію відповідно до інтегрування ПШ (за необхідністю). прийнятого сигналу; 2. Усунення втрат проникнення сигналу, що Фіг.2 - блок-схема підсистеми прийому сигналу взагалі має місце при роботі у автомобілі або примобільною станцією; міщенні. Фіг.3 - блок-схема другого втілення винаходу, 3. Високий коефіцієнт підсилення антен БС. де БС може передавати повідомлення у зворот4. Збільшення висоти антени базової станції, ному каналі до сусідньої БС, яка коригує свою синпорівняно з середньою висотою розташування хронізацію відповідно до прийнятого сигналу; мобільних станцій. Фіг.4 - блок-схема четвертого втілення вина5. Зменшених локальних перешкод. ходу, де еквівалент станції приймає сигнали пряВ більшості випадків сила сигналу є достатмого каналу від двох БС і передає повідомлення ньою. одній з них, вказуючи часове співвідношення між Також необхідно при вимірюванні сигналу двома БС, визначеними еквівалентом станції; прямого каналу уникати одночасної передачі сигФіг.5 - блок-схема п'ятого втілення винаходу, налу прямого каналу більше ніж однією БС. Наде еквівалент станції передає пробний сигнал приклад, можливі випадки, коли обидві БС знаходвом БС, які використовують час надходження дяться в межах взаємної прямої видимості, а усі пробного сигналу для синхронізації їх внутрішніх інші сусідні БС знаходяться поза цими межами. В годинників; такому випадку, коли одна з пари БС бланкує пеФіг.6 - блок-схема шостого втілення винаходу, редачу свого сигналу, вона може приймати лише де еквівалент станції приймає сигнали прямого сигнал від іншої БС цієї пари, оскільки сигнали цієї каналу від двох БС і ретранслює їх назад до БС, БС заглушують слабкіші сигнали від сусідніх БС. щоб їх можна було використовувати для синхроніТе ж саме відбувається, коли це робить інша БС. В зації. результаті дві БС стають ізольованими і не можуть Якщо недостатньо даних від мобільних станцій здійснювати синхронізацію з рештою БС мережі. в процесі передачі зв'язку, повідомлення мобільЗв'язок з рештою БС мережі можливий лише тоді, них станцій про передачу зв'язку не можна викоколи обидві БС одночасно бланкують передачу ристовувати для синхронізації. Таке трапляється, своїх сигналів. Та ж сама проблема може виникнуколи інформаційні потоки дуже малі або коли моти у більшої групи БС, розміщених ізольовано від більні станції у більшості є нерухомими. В першомережі, якщо не застосовувати спеціальних типів му типовому втіленні винаходу БС приймає сигнабланкування. ли прямого каналу від сусідньої БС або групи Щоб уникнути докладного аналізу мережі, який сусідніх БС. БС вилучає з сигналу, прийнятого від · може знадобитися для визначення типів бланкуіншої БС, необхідну часову інформацію. вання, застосовують просте рандомізоване бланОскільки усі БС працюють на однаковій частокування в даних інтервалах. В зумовлені часові ті, БС має припинити передачу свого сигналу у інтервали кожна БС рандомізовано приймає ріпрямому каналі для того, щоб мати можливість шення про бланкування свого сигналу. У типовому приймати сигнали від інших БС. На Фіг.1 БС 104 втіленні імовірність рандомізованого визначення приймає сигнал прямого каналу від БС 100, щоб бланкування складає 50%. У такому випадку придосягти синхронізації з БС 100. Якщо БС 104 має близно 50% БС системи здійснюють бланкування багато секторів (не показані на кресленнях), бажакожні кілька хвилин і можуть бачити усіх своїх суно, щоб усі ці сектори одночасно припинили пересідів. давати сигнали прямого каналу, оскільки рівень Визначивши місцезнаходження БС, затримки задніх пелюстків антени перевищуватиме рівні на шляху проходження сигналу між БС можна висигналів, переданих від БС 100. Для прийому сигзначити з оцінок часу надходження сигналу і з чаналу прямого каналу від БС 100 бажано, щоб БС сової різниці між комірками у процесі визначення. 104 мала підсистему 150 приймача прямого канаЧасові відхилення можна використовувати для лу для прийому сигналів прямого каналу від БС коригування синхронізації БС за допомогою 100. центрального процесора або здійснюючи обробку Оскільки БС призначені для покриття певної на окремих БС, можливо з урахуванням встановзони, з деяким перекриттям суміжних комірок, БС леної ієрархії БС. не обов'язково приймає сигнали від інших БС. ОдБланкування БС впливає на прямий канал для нак, в більшості випадків це не створює проблем. усіх активних мобільних станцій. Для мінімізації 11 76087 12 цього впливу час бланкування має бути коротким. сигналів передавачем 120 прямого каналу через Коли зникає сигнал прямого каналу, активні мобіантену 118, сигнали, прийняті антеною 118, надльні станції в зоні покриття бланкованих БС збільсилають до підсистеми 150 приймача прямого кашують потужність своєї передачі на 1дБ за 1мс. налу. Приймач 134 прямого каналу перетворює Якщо час бланкування складає лише 5мс, то час сигнал з зниженням частоти, фільтрує, підсилює відновлення складає 6мс, і більшість мобільних згідно з смугою частот і надсилає його до демодустанцій лише втрачатимуть один кадр. Якщо бланлятора 136 прямого каналу. У типовому втіленні кування займатиме більше ніж 10мс, можна втраприйняті сигнали містять пілотні символи, признатити більше ніж один кадр. Однак, втрата двох чені для полегшення встановлення зв'язку і для послідовних кадрів кожні 2 хвилини - це лише збікогерентної демодуляції інформаційних каналів. льшення частоти кадрових помилок (далі - ЧКП) на Типове втілення для прийому пілот-сигналу пря0,03%. Це незначною мірою впливає на існуючу мого каналу описано в патенті США №4644591, ЧКП у 1% або більше. введеному сюди посиланням. Сигнали прямого каналу від БС 100 і 104 пеДемодульований пілот-сигнал від демодуляредаються на першій частоті. Сигнали зворотного тора 136 прямого каналу надходить до елемента каналу від мобільних станцій (не показаних) до БС 136 коригування часу. Цей елемент визначає кое100 і 104 передаються на другій частоті. У типовофіцієнт корекції часу для модулятора 122 прямого му втіленні сигнали прямого і зворотного каналів є каналу, який коригує свій час для синхронізації між сигналами ПДКУ. Типове втілення для передачі БС 100 і 104. дуплексних сигналів ПДКУ описано в патенті США На Фіг.2 представлено роботу підсистеми 150 №4901307, введеному сюди посиланням. прийому сигналів мобільною станцією. За допомоУ БС 100 пілотні символи та інформаційні дані гою підсистеми прийому сигналів мобільною станпрямого каналу надходять до модулятора 106 цією БС 104 намагається синхронізувати ПШ сигпрямого каналу, який у типовому втіленні є модунал, сформований генератором 206, з сигналом лятором ПДКУ, описаним у вищезазначеному папрямого каналу, прийнятим від БС 100. У типовому тенті США №5103459. Сигнал ПДКУ надходить до втіленні генератор ПШ генерує ПШ сигнали PNi передавача 108 прямого каналу, який перетворює PNQ. 3a допомогою регістрів зсуву з лінійним звоцей сигнал з підвищенням частоти, фільтрує і підротнім зв'язком, які генерують ПШ кодову послідосилює для передачі його через антену 110 у прявність для розгортання і згортання пілот-сигналів. мому каналі. Таким чином, процес синхронізації між кодами для Крім того, через антену 116 приймають сигназгортання прийнятого пілот-сигналу і кодом ПШ ли зворотного каналу і надсилають до приймача розгортання прийнятого пілот-сигналу включає 114 зворотного каналу, який перетворює їх з знивизначення часового зсуву у регістрі зсуву з лінійженням частоти, фільтрує, підсилює і надсилає до ним зворотнім зв'язком у генераторі 206 ПШ. демодулятора 112 зворотного каналу. Типове втіСигнал широкого спектру надходить до прийлення для демодуляції сигналів ПДКУ описано в мача 134 прямого каналу, який перетворює з знипатенті США №5654979, введеному сюди посиженням частоти, фільтрує, підсилює цей сигнал і ланням. надсилає його до допоміжного буфера 200. Буфер Крім можливості передавати сигнали прямого 200 надсилає прийняті зразки до елементів 202 і каналу і приймати сигнали зворотного каналу, БС 204 згортання, які перемножують прийнятий сиг104 може приймати сигнали прямого каналу, пенал на ПШ код, сформований генератором 206 редані БС 100. У БС 104 пілотні символи та інфоПШ. Завдяки випадковості шуму, природної для рмаційні дані прямого каналу надходять до модуПШ кодів, добуток ПШ коду і прийнятого сигналу лятора 122 прямого каналу, який у типовому дорівнюватиме, по суті, нулю, окрім точки синхровтіленні є модулятором ПДКУ, описаним у вищенізації. зазначеному патенті США №5103459. Сигнал Пошуковий контролер 218 створює гіпотезу ПДКУ далі надсилають до передавача 120 прямозсуву генератор 206 ПШ і визначає вікно пошуку го каналу, який перетворює його з підвищенням пілот-сигналу прямого каналу, прийнятого від БС. частоти, фільтрує та підсилює і передає через У типовому втіленні кожна БС має зумовлений антенний перемикач 128 для передачі антеною зсув ПШ відносно сусідніх БС. У типовому втіленні 118 у прямому каналі. БС 104 визначається за зумовленим зсувом ПШ Сигнали зворотного каналу приймають антеміж її пілот-сигналом прямого каналу і пілотною 126 і надсилають до приймача 130 зворотного сигналом прямого каналу, прийнятим від БС 100 каналу, який перетворює прийнятий сигнал зворо(ПШВІДН). Крім того, у БС 104 відома відстань між тного шляху з підвищенням частоти, фільтрує і БС 100 і 104 (R). Таким чином, у типовому втіленні підсилює згідно з смугою частот прямого каналу, пошуковий контролер 218 зосереджує свій пошук після чого надсилає до демодулятора 132 зворотпілот-сигналу на ПШ послідовності (ПШЦ), визнаного каналу. Типове втілення способу і пристрою ченій згідно з рівнянням: для демодуляції сигналів зворотного каналу сисПШЦ=ПШ104+ПШвідн+R/c, (1) теми ПДКУ описано у вищезазначеному патенті де ПШ104- це зсув ПШ БС 104, а с - швидкість США №5654979. світла. При центруванні вікна пошуку пілот-сигналу Сигнали прямого каналу від БС 100 також моу місці, де може бути знайдений цей сигнал, за же приймати БС 104. Якщо БС 104 готова до опеумови, якщо БС є синхронізованими, відхилення рації часової синхронізації, антенний перемикач від центру вікна пошуку дорівнює часовій різниці 128 переводять з одного стану в інший таким чиміж БС 100 і 104. ном, що замість надсилання даних для передачі Згідно з форматом розгортання, пілот-сигнал 13 76087 14 прямого каналу, зсунутий відносно модулятора на базова станція використовує окремий генера122 прямого каналу, надходить до пошукового тор ПШ послідовності (що має назву генератора контролера 218, який просуває вперед або назад ортогонального коду Голда). Для полегшення погенератор ПШ для компенсації зумовленого фазочаткового встановлення і передачі зв'язку, бажано вого зсуву між кодами розгортання БС 100 і 104. знати часовий зсув ПШ послідовності БС, виміряКрім того, пошуковий контролер 218 забезпечує ний таким чином, що мобільна станція може вести компенсацію проходження сигналу від БС 100 до пошук у зменшеному вікні пошукових гіпотез, що в 104. Часовий зсув генератора 206 ПШ можна здійсвою чергу зменшує час встановлення зв'язку і снювати сумісним зчитуванням з виходів лінійного можливість припинення зв'язків під час передачі. зсувного регістру у генераторі 206 ПШ або маскуЗгідно з запропонованим розширеним формаванням виходу для одержання зсувної ПШ послітом WCDMA хронувальний сигнал, прийнятий від довності, або комбінуванням цих двох методів. модулятора 122 прямого каналу, надходить до Така початкова інформація про фазу для здійспошукового контролера 218, який коригує цей сигнення пошуку пілот-сигналу БС 100 від пошукового нал згідно з відомою затримкою на шляху прохоконтролера 218 надходить до генератора 206 ПШ. дження сигналу від БС 100 до 104. Це створює У типовому втіленні прийнятий сигнал модуопорну фазу, яку використовують для ініціалізації люють чотирипозиційною фазовою маніпуляцією генератора 206 ПШ, який може мати сумісне зчи(ЧФМ) таким чином, що генератор 206 ПШ надситування, узгоджене з часовим зсувом. Основна лає ПШ послідовність для компонента І модуляції і різниця між синхронізацією системи на базі різних окремо послідовність для компонента Q модуляції розгортаючих функцій і синхронізацією на базі зсудо елементів 202 і 204 згортання. Елементи 202 і ву розгорнутої функції, полягає у тому, що першим 204 згортання перемножують ПШ послідовність на буде потрібна ще одна операція визначення відлівідповідний компонент модуляції і надсилають ці ку часу з прийнятої розгорнутої функції, тобто часу два добутки вихідного компоненту до когерентних відносно відомої фази двох розгортаючих функцій. накопичувачів 208 і 210. II. Передача сигналів від базових станцій на Когерентні накопичувачі 208 і 210 підсумовучастотах передачі сигналів мобільною станцією ють добуток на довжині його послідовності і викоАльтернативою бланкуванню передачі сигнаристовують сигнали, прийняті від пошукового конлів БС і виявленню передач від сусідньої БС є петролера 218, для очищення, фіксації стану і ріодична передача короткого пробного сигналу від встановлення періоду підсумовування. Суми добуБС на частоті передачі сигналів мобільною станцітків надходять від суматорів 208 і 210 до квадраєю. Звичайно сигнали від мобільної станції систетора 212, який підносить до квадрату кожну з сум і ми ПДКУ, що знаходиться біля БС, мають дуже складає їх. низьку потужність, але передачі таких коротких Квадратор 212 надсилає суму квадратів до непробних сигналів мають достатню потужність для когерентного об'єднувача 214, який визначає знадосягнення сусідніх БС. За той проміжок часу, коли чення енергії виходу квадратора 212. НекогерентБС передає сигнали у смузі частот зворотного каний накопичувач 214 протидіє ефектам розбігу налу, приймач зворотного каналу, що знаходиться частоти між тактовими імпульсами, що передає у БС не може демодулювати сигнали зворотного БС, і тактовими імпульсами, що приймає БС, а каналу, прийняті від мобільних станцій в зоні обтакож допомагає будувати статистику виявлення слуговування БС. Крім того, на інші сусідні БС мосигналу в умовах завмирання. Некогерентний наже несприятливо вплинути передача сигналів у копичувач 214 надсилає сигнал енергії до компазворотному каналі від БС і породити стирання каратора 216, який порівнює значення енергії з зудрів. Порівняно з бланкуванням БС таке траплямовленими порогами, наданими пошуковим ється рідко і мало впливає на загальне функціонуконтролером 218. Результати кожного з порівнянь вання системи. знову надсилають до пошукового контролера 218. Необхідно сплановувати передачі таким чиЦі результати включають енергію кореляції і зсув ном, щоб усі БС знали, коли проводити пошук хроПШ, визначені вимірюванням. нувального пробного сигналу. Базовій станції, яка Згідно з винаходом, пошуковий контролер 218 потребує синхронізації, також буде потрібно, щоб виводить фазу ПШ, яка забезпечує синхронізацію сусідні БС здійснювали вимірювання її пробного з БС 100 і з елементом 138 часової корекції. Елесигналу. Тоді дані, необхідні для синхронізації БС, мент 138 часової корекції порівнює зсув ПШ з фавикористовують разом з відомою відстанню між зовим зсувом ПШ гіпотези, визначеним хронуваБС для визначення ряду значень часових відхильним сигналом від модулятора 106 прямого лень. Порівняно з вищезазначеним способом, знаканалу, затримкою на шляху проходження сигналу чення часових відхилень тоді використовують для і зумовленим фазовим зсувом між ПШ послідовнокоригування часів у різних БС мережі. стями БС 100 і 104. Сигнал часового відхилення Порівняно з бланкуванням БС, ресурс каналу надходить від елемента 138 часової корекції до зв'язку для передачі пробного сигналу від однієї модулятора 122 прямого каналу, який коригує свій БС до іншої має бути достатнім для подолання хронувальний сигнал для генерування свого роздодаткових втрат на довшому шляху проходженгорнутого сигналу прямого каналу. ня. Можна чекати збільшення втрат на шляху проВ іншому втіленні, описаному у запропоноваходження сигналу на ті ж самі 10-11дБ, крім того, них стандартах Європейського інституту телековищезазначені фактори зменшення також мають мунікацій (надалі WCDMA), включення кандидату, бути ураховані. Якщо припустити, що БС у своєму згідно з UMTS наземним радіо-доступом ITU-R передавачі використовуватиме стандартний підRTT, передбачає ПШ розгортання, при якому кожсилювач потужності мобільної станції (приблизно 15 76087 16 200мВт), то бланкування БС дає більший енерге350 надсилає сигнал запуску до генератора 337 тичний запас у каналі зв'язку, за умови, що пілотповідомлень і перемикача 324. Перемикач 324 сигнали БС взагалі передають на рівні 10-20% переводять з одного стану в інший у відповідь на базової ΗΡΑ, тобто приблизно 1-4 Вт. Однак, висигнал запуску, прийнятий від хронувального елещезазначені коефіцієнти виявилися значно більмента 350. У відповідь на сигнал запуску, прийняшими, ніж різниця у розмірах підсилювача потужтий від хронувального елемента 350, генератор ності, тому для більшості мереж будь-які методи є 337 повідомлень формує зумовлену послідовність придатними в однаковій мірі. символів, яку надсилає до передавача 352 звороНа Фіг.3 представлено інше типове втілення тного каналу, який перетворює з підвищенням часдля синхронізації БС 300 і 304. Як було зазначено тоти, фільтрує і підсилює сигнал, який через певище, сигнали прямого каналу передають у першій ремикач 324 надходить для передачі антеною 326. смузі, а сигнали зворотного каналу - у другій смузі. У БС 300 пілотні символи та інформаційні дані У типовому втіленні сигнали прямого і зворотного надходять до модулятора 306 прямого каналу, каналів зв'язку є сигналами ПДКУ. який у типовому втіленні є модулятором ПДКУ, Як уже відзначалось, БС 300 знає, коли проописаним у вищезазначеному патенті США водити пошук пробної послідовності БС 304. Один №5103459. Сигнал ПДКУ надсилають до передаспосіб одержання цієї інформації полягає у тому, вача 308 прямого каналу, який перетворює його з що БС 304 має послати повідомлення-запит до підвищенням частоти, фільтрує і підсилює для контролера БС (не показаного на кресленнях), що передачі антеною 310 у прямому каналі. має зв'язок з БС 300 і 304. У відповідь на таке поСигнали зворотного каналу приймають у БС відомлення-запит, прийняте від БС 304, контролер 300 антеною 316 і надсилають до приймача 314 БС формує повідомлення про планування пробнозворотного каналу, який перетворює їх з зниженго сигналу, вказуючи час, коли пробний сигнал має ням частоти, фільтрує, підсилює і надсилає через бути переданий до БС 304, і надсилає це повідомперемикач 315 до демодулятора 312 зворотного лення до БС 300. Різниця між спланованим часом каналу. Типове втілення для демодулювання сигприйому пробного сигналу БС 300 і часом, коли налів зворотного каналу системи ПДКУ описано у БС 300 фактично не приймає пробний сигнал від вищезазначеному патенті США №5654979. БС 304, дає часове відхилення у БС 300, за приВ певний час перемикач 317 переводять з одпущення, що тактовий імпульс у БС 304 є відкориного стану в інший для надсилання даних зворотгованим. ного каналу через даний перемикач до фільтру БС 300 містить усі схеми, необхідні для нор315. У типовому втіленні час для перемикання мального функціонування. Крім того, вона має перемикача 315 з одного стану в інший (tперем) виможливість передавати повідомлення у смузі часзначається за рівнянням: тот зворотного каналу і одночасно бланкувати Tперем = tпередачі + R/C — tвікно/2, (2) прийом сигналів зворотного каналу. У БС 304 пілоде tпередачі- час для передачі пробного сигналу тні символи та інформаційні дані прямого каналу від БС 304, R - відстань між БС 300 і 304, с - швиднадходять до модулятора 322 прямого каналу, кість світла, a tвікно- віконна функція, за якою БС який у типовому втіленні є модулятором ПДКУ, 300 шукатиме пробний сигнал БС 304. описаним у патенті США №5103459. Сигнал ПДКУ У зазначений час перемикання прийнятий сигнадсилають до передавача 320 прямого каналу, нал надсилають через перемикач 315 до фільтру який перетворює його з підвищенням частоти, фі317. У першому втіленні перемикача 315 даний льтрує і підсилює для передачі антеною 318 у перемикач, надсилаючи сигнал зворотного каналу прямому каналі. до фільтру 317, продовжує надсилати сигнал звоСигнали зворотного каналу приймають антеротного каналу до демодулятора 312 зворотного ною 326 і надсилають через перемикач 324 до каналу. Якщо пробний сигнал передається з енерприймача 330 зворотного каналу, який перетворює гією достатньою для того, щоб під час передачі їх з зниженням частоти, фільтрує, підсилює згідно суттєво перервати зворотній канал, перемикач 315 з смугою частот зворотного каналу і надсилає до може на деякий час заборонити надсилати сигнал демодулятора 332 зворотного каналу. Типове втізворотного каналу до демодулятора 312 зворотнолення способу і пристрою для демодуляції сигнаго каналу. лів ПДКУ описано у вищезазначеному патенті Відповідний фільтр 317 призначений забезпеСША №5654979. чувати співвідношення сигнал-шум на його виході Коли базова станція готова передавати пробдля зумовленої послідовності передачі сигналів. ний сигнал синхронізації зворотним каналом до БС Реалізації відповідного фільтру 317 відома фахів300, перемикач 324 перемикають з одного стану в цям. Два способи виконання фільтру 317 включаінший такими чином, що замість того, щоб надсиють використання згортаючого і кореляційного лати дані, прийняті антеною 326, до приймача 330, фільтрів. Функція фільтру 317 полягає у виведенні дані для передачі надсилають від передавача 352 сигналу високої потужності, якщо прийнято зумовзворотного каналу до антени 326. Переведення лену послідовність. перемикача з одного стану в інший перешкоджає Дані, прийняті від фільтру 317, надходять до прийому приймачем 330 зворотного каналу хронудетектора 319 енергії, який виявляє прийом пробвального повідомлення, що передається у смузі ного сигналу синхронізації за його суттєво високою частот зворотного каналу. Це запобігає пошкокореляційною енергію. Виявивши прийом пробного дженню обладнання приймача у БС 304 сигналасигналу синхронізації, детектор 319 енергії надсими від БС 304, переданими зворотнім каналом. лає сигнал до хронувального елементу 321 кориВ певний час (tпередачі) хронувальний елемент гування, який порівнює фактичний час прийому 17 76087 18 пробного сигналу від БС 304 з часом очікуваного міщують таким чином, щоб створити шлях прохоприйому пробного сигналу від БС 304. Як раніше дження сигналу між БС 402 і еквівалентом 406 зазначалося, різниця вказує на часову різницю між станції і між БС 404 і еквівалентом 406 станції. БС 300 і 304. Сигнал коригування часу надходить Оскільки БС є нерухомою і розміщується в зумоввід хронувального елементу 321 коригування до леному місці, обчислення часової різниці між БС модулятора 306 прямого каналу. У відповідь на 402 і 404 можна здійснювати, поки еквівалент стахронувальний сигнал коригування коригують внутнції може вимірювати фазу сигналів прямого канарішні годинники БС 300. лу, прийнятих від БС 402 і 404, і повідомляти про III. Використання нерухомих станцій для вимірезультати одну з них. рювання сигналів, що передають базові станції. У БС 402 пілотні та інформаційні символи надПроблема, пов'язана з вищезазначеними меходять до модулятора 408 прямого каналу, який у тодами, виникає тоді, коли є БС, яка не може витиповому втіленні є модулятором ПДКУ, описаним явити інші БС. Наприклад, у тунелі БС може бути у вищезазначеному патенті США №5103459. Сигрозміщена ізольовано від усіх інших БС, але мати нал ПДКУ надсилають до передавача 410 прямого можливість приймати сигнали від мобільних станканалу, який перетворює його з підвищенням часцій, що передають зв'язок іншим БС. Насправді, тоти, фільтрує і підсилює передачі через антену сигналу необхідно обійти дуже гострий кут для 412 у прямому каналі. Сигнали зворотного каналу того, щоб пройти від однієї БС до іншої, але мобіприймають антеною 412 і надсилають до приймальна станція в певному місці може приймати сигча 416 зворотного каналу, який перетворює їх з нали від обох БС. зниженням частоти, фільтрує, підсилює згідно з У випадку відсутності шляху проходження сигсмугою частот зворотного каналу і надсилають до налу від однієї БС до іншої, встановлюють еквівадемодулятора 418 зворотного каналу. Типове втілент станції, що за командою передає визначену лення способу і пристрою для демодулювання фазу пілот-сигналу. Оскільки еквіваленти станцій є сигналів ПДКУ описано у вищезазначеному патеннерухомими і розміщені в зумовленому місці, обті США №5654979. числення часової різниці між двома БС можна Подібним чином, у БС 404 пілотні та інформаздійснювати, поки еквівалент станції може вимірюційні символи надходять до модулятора 420 прявати пілот-сигнали, прийняті від обох БС, і повідомого каналу, який у типовому втіленні є модулятомляти про результати одну з них. БС використовує ром ПДКУ, описаним у вищезазначеному патенті відстані між БС і еквівалентом станції, включаючи США №5103459. Сигнал ПДКУ надсилають до певідносні затримки пілот-сигналу, наведені у повіредавача 422 прямого каналу, який перетворює домленні, для її синхронізації відносно іншої БС. його з підвищенням частоти, фільтрує і підсилює Важко розміщувати еквівалент станції там, де для передачі антеною 424 у прямому каналі. Сигрівні потужності БС близькі, в такому випадку монали зворотного каналу приймають антеною 430 і же знадобитись бланкування ближчої БС для винадсилають до передавача 428 зворотного канамірювання затримки у обох БС. Для цього БС дає лу, який перетворює їх з зниженням частоти, фількоманду еквіваленту станції здійснити вимірювантрує, підсилює згідно з смугою частот зворотного ня двох пілот-сигналів, до і під час бланкування. каналу і надсилає до демодулятора 426 зворотноТоді об'єднані дані цих вимірювань будуть еквіваго каналу. лентними даним одночасного вимірювання двох Сигнали прямого каналу від БС 402 і 404 пілот-сигналів. приймають антеною 432 еквіваленту 406 станції. Робота еквівалентів станції залежить від відСигнал надходить через антенний перемикач 434 носних потужностей базових станцій, що мають до приймача 436, який перетворює його з зниженбути виміряні. Припускаючи, що для пілот-сигналу ням частоти, фільтрує і підсилює згідно з частотою Ес/Іо=-7дБ, а інша базова станція на 10дБ сильнізворотного каналу. Прийняті сигнали надходять до ша, для слабкого пілот-сигналу Ес/Іо=-17дБ. Для пошукового пристрою 438, який визначає зсув ПШ одержання 90%-ї імовірності прийому в умовах сигналів прямого каналу, переданих БС 402 і 404. завмирання Релея і 10%-ї частоти хибних ознак У типовому втіленні сигнали прямого каналу вклюпомилки потрібно мати відношення сигнал-шум чають набір пілотних символів, що можуть бути 21дБ і тоді буде необхідними інтегрування більш використані для полегшення прийому сигналів ніж 6000 елементів. Це відповідає приблизно 5мс прямого каналу від БС 402 і 404. для частоти елементів сигналу 1,23мГц. Якщо інЗсув ПШ прийнятих сигналів прямого каналу ша базова станція на 20дБ сильніша, то необхідно надсилають до генератора 440 повідомлень, який інтегрувати на 50мс. Когерентне інтегрування на формує повідомлення про зсув ПШ прийнятих сиг50мс є можливим у еквіваленті станції, але необналів від БС 402 і 404, і надсилає його до модуляхідна й значна обробка для розгляду різних гіпотез тора 442, який у типовому втіленні є модулятором затримки. Прийнятний рівень когерентного інтегПДКУ, описаним у патенті США №5103459. рування визначає, яким має бути точний рівень У типовому втіленні повідомлення передають узгодженості втрат на шляху проходження сигналу у вигляді пробного сигналу доступу каналом досміж двома станціями, щоб уникнути потреби блантупу БС 402 або 404. Формування каналу доступу кування сусідньої БС. добре відоме. У типовому втіленні каналу доступу Фіг.4 ілюструє випадок, коли немає жодного ПДКУ (IS-95) пробний сигнал доступу спочатку шляху проходження сигналу від однієї БС до іншої. покривають зумовленою довгою ПШ послідовнісПерешкода 400 блокує шлях проходження сигналу тю, відомою БС і еквіваленту 406 станції. У типоміж БС 402 і 404. Оскільки є втрати на шляху провому втіленні коротка ПШ послідовність покриває ходження між БС 402 і 404, еквівалент станції розпробний сигнал і передається до БС. Типове вті 19 76087 20 лення для генерування каналу доступу у системі У БС 504 антена 540 приймає пробний сигнал і зв'язку ПДКУ описано в патенті США №5544196, передає його до приймача 538 зворотного каналу, введеному сюди посиланням. який перетворює його з зниженням частоти, фільУ типовому втіленні пробний сигнал доступу, трує, підсилює і надсилає до демодулятора 536 що містить інформацію про зсув ПШ виявлених зворотного каналу, який генерує вихідний сигнал, пілот-сигналів БС 402 і 404, приймає БС 402 або енергія якого пропорційна кореляції послідовності 404. У типовому втіленні пробний сигнал доступу очікуваного пробного сигналу і послідовності принадходить до БС 404, де його приймає антена 430 йнятих символів. У типовому втіленні узгоджений і надсилає до приймача 428 зворотного каналу, фільтр 536 включає узгоджений фільтр (не покаякий перетворює його з зниженням частоти, фільзаний), що використовується для генерування витрує і підсилює згідно з смугою частот зворотного хідного сигналу. Значення енергії. надходить до каналу. Прийнятий сигнал надходить до демодукеруючого процесора 534. Виявивши послідовність лятора 426 зворотного каналу, який демодулює пробних сигналів, керуючий процесор 534 надсипробні сигнали і витягає визначені фазові зсуви лає сигнал до контролера БС, вказуючи час приПШ. йому послідовності пробних сигналів від еквівалеВизначені фазові зсуви ПШ надходять до кенту 508 станції. руючого процесора 446, який обчислює відносну Подібним чином, у БС 502 антена 518 приймає часову різницю між БС 404 і 402, що визначається пробний сигнал і надсилає його до приймача 520 рівнянням (1). Обчислена часова зміна надсилазворотного каналу, який перетворює його з зниється до елементу 448 коригування часу, який сиженням частоти, фільтрує, підсилює і надсилає до нхронізує БС 404 з БС 402, на основі обчисленої демодулятору 236 зворотного каналу. Демодулякорекції синхронізації. тор 236 зворотного каналу формує вихідний сигЗдійснення необхідного коригування синхронінал, енергія якого пропорційна кореляції очікувазації у БС передбачає швидке коригування синхної послідовності символів пробного сигналу і ронізації. В іншому втіленні БС 404 може надіслаприйнятої послідовності символів. У типовому втіти інформацію, що міститься у пробному сигналі ленні фільтр 532 включає узгоджений фільтр (не доступу, назад до центрального контролера БС показаний), що використовується для генерування (не показаного на кресленнях). Необхідні обчисвихідного сигналу. Значення енергії надходить до лення можуть бути здійснені контролером БС, а керуючого процесора 524. Виявивши послідовність необхідні часові зсуви можна передати БС. Втіпробних сигналів, керуючий процесор 524 надсилення передбачає додатковий фактор, що дає лає цей сигнал до контролера БС, вказуючи час можливість одночасно оцінити інформацію, прийнприйому послідовності пробних сигналів від еквіяту від багатьох БС, а у деяких випадках здійснити валенту 506 станції. Контролер БС визначає кореглобальну синхронізацію системи. кцію часової різниці між БС 504 і 506, і надсилає IV. Використання нерухомих станцій для переповідомлення до БС 504 і 506, вказуючи часову дачі пробних сигналів базовим станціям. корекцію згідно з рівнянням (2). Еквівалент станції можна також використовуУ БС 502 сигнал коригування часового відхивати для передачі пробних сигналів за командою. лення приймає керуючий процесор 524, який надТакі пробні сигнали передають на рівні потужності, силає сигнал коригування синхронізації до генерадостатньому для досягнення бажаної групи сусідтора 516 синхроімпульсів. Модулятор 510 прямого ніх комірок, де має бути скоригована синхронізаканалу використовує скоригований сигнал часу ція. Як для вищеописаних вимірювань у мобільній при формуванні ПШ послідовностей для розгорстанції, оцінювання часового відхилення одержутання вихідних даних. Пілотні та інформаційні сиють на основі вимірювань часу надходження сигмволи, що надходять до модулятора 510 прямого налу до БС з урахуванням відомих відстаней між каналу, розгортають згідно з ПШ послідовностями, комірками і нерухомими мобільними станціями. визначеними згідно з скоригованим сигналом часу. Якщо мають бути синхронізовані БС 502 і 504 Розгорнутий сигнал надходить до передавача 512 (Фіг.5), на мобільну станцію 506 передають повіпрямого каналу, який перетворює його з підвидомлення-запит. Повідомлення-запит пробних щенням частоти, фільтрує, підсилює згідно з смусигналів приймає еквівалент 506 станції антеною гою частот прямого каналу і надсилає до антени 542. Прийнятий сигнал через антенний перемикач для передачі. 544 надходить до приймача 546 прямого каналу, Подібним чином, у БС 504 сигнал коригування який перетворює його з зниженням частоти, фільчасового відхилення приймає керуючий процесор трує і підсилює згідно з смугою частот зворотного 534, який надсилає цей сигнал до генератора 532 каналу, після чого він надходить до демодулятора синхроімпульсів. Модулятор 530 прямого каналу 548, який демодулює його і приймає повідомленвикористовує скоригований сигнал часу при форня-запит пробних сигналів. муванні ПШ послідовностей, що використовуються Прийнявши повідомлення-запит пробних сигдля розгортання вихідних даних. Пілотні та інфорналів, демодулятор 548 надсилає сигнал запуску маційні символи, що надходять до модулятора 530 до генератора 550 повідомлень, який формує зупрямого каналу, розгортаються згідно з ПШ послімовлену послідовність символів і надсилає до педовностями, визначеними згідно з скоригованим редавача 552 зворотного каналу. Передавач 552 сигналом часу. Розгорнутий сигнал надходить до перетворює сигнал з підвищенням частоти, фільтпередавача 528 прямого каналу, який перетворює рує, підсилює згідно з смугою частот зворотного його з підвищенням частоти, фільтрує, підсилює каналу і через антенний перемикач 544 надсилає згідно з смугою частот прямого каналу і надсилає сигнал для передачі антеною 542. до антени для передачі. 21 76087 22 V. Нерухомий ретранслятор. надсилають до приймача 628 зворотного каналу, П'яте втілення винаходу для синхронізації баякий перетворює їх з зниженням частоти, фільтзової станції передбачає використання простого рує, підсилює згідно з смугою частот зворотного ретранслятору. Як і у вищезазначених способах каналу і надсилає до демодулятора 626 зворотноприйому сигналів еквівалентами станцій, цей рего каналу. транслятор розміщують таким чином, що він може Сигнали прямого каналу від БС 602 і 604 приймати сигнали від двох або більше БС. приймає антена 632 еквіваленту 606 станції. СигДаний ретранслятор періодично перетворює у нал надходить через антенний перемикач 634 до цифрову форму і зберігає протягом деякого часу приймача 636, який перетворює його з зниженням прийняті сигнали прямого каналу, і ретранслює ці частоти, фільтрує і підсилює згідно з частотою зразки зворотнім каналом. Таким чином, ретрансзворотного каналу. Прийняті сигнали надходять до лятор одержує миттєве значення переданих пілотАЦП 638. Цифрові зразки прийнятого сигналу надсигналів БС, що можуть бути використані для висилаються до ЦАП 640, який перетворює їх знову значення відносних часів у БС. Простіше передати в аналогову форму для перетворення у вищу часцю інформацію базовим станціям для аналізу, ніж тоту зворотного каналу. Цифрові зразки надходять обробляти її у ретрансляторі. Такий підхід дозводо передавача 642, який перетворює сигнал з підляє використовувати дешеві малопотужні привищенням частоти, фільтрує і підсилює згідно з строї. Ретранслятор також може просто здійснюсмугою частот зворотного каналу і надсилає через вати зсув частоти сигналу прямого каналу, що антенний перемикач 634 для передачі антеною надходить, і ретранслювати його у зворотному 632. каналі, не зберігаючи цей сигнал. Для цього реУ типовому втіленні передачу пакетної інфортранслятор має одночасно приймати і передавати мації від еквіваленту 606 станції, яка є частотною сигнали, але потреба у аналого-цифровому перетрепрезентацією прийнятих цифрових зразків у воренні і зберіганні зразків зникає. смузі частот прямого каналу, приймає БС 604 або Дійсно, даний ретранслятор не синхронізову602. Якщо пробний сигнал приймає БС 602, то ють з системою ПДКУ. Для полегшення обробки його приймає антена 616 і надсилає до приймача інформації у БС для виявлення передачі від ре616 зворотного каналу, який перетворює його з транслятора, таку передачу здійснюють кожні зниженням частоти, фільтрує і підсилює згідно з 10хв. або більше. Невизначеність часів зумовлюсмугою частот зворотного каналу. В певний проміється помилкою годинника ретранслятору у період жок часу, коли очікується прийом пробного сигнаміж передачами. З точністю таймера 3x10-7 (при лу, перемикач 617 надсилає прийнятий сигнал до нормальній низькій потужності ТСХО) зсув відбупошукового пристрою 619. вається кожні 10хв. лише на 180мс. Пошуковий пристрій 619 визначає відносну Для подальшого спрощення пошуку БС рефазу сигналів від БС, переданих ретранслятором транслятор передає свою інформацію пакетом на 606 і має аналізувати сигнал у вікні відносно часу досить високому рівні потужності. Це не викликає очікуваної передачі ретранслятором, оскільки резначного погіршення в роботі системи, оскільки транслятор не синхронізований з мережею і тому відбувається рідко. Передачі можна також передуможуть виникнути деякі часові зсуви з моменту вати коротка преамбула, ПШ код, який є унікальостанньої передачі пакетної інформації. Пошуконим для ретранслятора і може бути виявлений вий пристрій 619 здійснює пошук прямого каналу, відповідними фільтром у БС. як описано для демодулятора 136 прямого каналу У БС 602 пілотні та інформаційні символи надпершого втілення. Пошуковий пристрій 619 визнаходять до модулятора 608 прямого каналу (Фіг.6), чає фазу сигналів прямого каналу від БС 602 і 604. який у типовому втіленні є модулятором ПДКУ, У типовому втіленні пошуковий пристрій 619 виописаним у вищезазначеному патенті США значає фазовий зсув каналів пілот-сигналів від БС №5103459. Сигнал ПДКУ надходить до передава602 і 604. ча 610 прямого каналу, який перетворює його з Пошуковий пристрій 619 надсилає визначену підвищенням частоти, фільтрує і підсилює для фазу сигналів прямого каналу до керуючого пропередачі антеною у прямому каналі. Сигнали звоцесора 650, який обчислює корекцію, необхідну ротного каналу приймаються антеною і надсиладля синхронізації внутрішніх годинників БС 602 і ються до приймача 616 зворотного каналу, який 604. Такі коригування здійснює БС, що виконує перетворює їх з зниженням частоти, фільтрує, пошук, або дані корекції надсилаються до контропідсилює згідно з смугою частот зворотного каналу лера БС відповідним каналом для передачі БС і надсилає через перемикач до демодулятора 618 604. зворотного каналу. Типове втілення способу і приЯкщо коригування синхронізації має бути здійстрою для демодулювання сигналів ПДКУ описано снене БС 602, то керуючий процесор обчислює у вищезазначеному патенті США №5654979. необхідну зміну внутрішньої синхронізації БС 602 і Подібним чином, у БС 604 пілотні та інформанадсилає сигнал, вказуючи зміну для годинника ційні символи надходять до модулятора 620 пря652, який коригує свою роботу згідно з цим сигнамого каналу, який у типовому втіленні є модулятолом, а модулятор 608 прямого каналу використором ПДКУ, описаним у вищезазначеному патенті вує скоригований годинник при модуляції сигналу США №5103459. Сигнал ПДКУ надходить до пепрямого каналу, прийнятого від БС 602. редавача 622 прямого каналу, який перетворює Якщо коригування синхронізації має бути здіййого з підвищенням частоти, фільтрує і підсилює снене базовою станцією 602, то керуючий процедля передачі антеною 624 у прямому каналі. Сигсор 650 обчислює необхідну зміну внутрішньої нали зворотного каналу приймають антеною 630 і синхронізації базової станції 604 і надсилає сиг 23 76087 24 нал, вказуючи зміну для контролера 654 БС, який гальні принципи, зазначені у цьому описі, можуть надсилає повідомлення, вказуючи дані корекції бути застосовані в інших формах, без винахідницдля синхронізації керуючого процесора 646 БС тва. Винахід не обмежується наведеним у цьому 604. Керуючий процесор 646 надсилає сигнал до описі втіленням. годинника 648, у відповідь на що відбувається коПерелік скорочень ригування синхронізації годинника 648, який кориПДЧУ - паралельний доступ з часовим ущільгує свою синхронізацію згідно з цим сигналу, а ненням каналів; модулятор 620 прямого каналу використовує скоПДЧУ1 - паралельний доступ з частотним ущіригований годинник при модуляції сигналу прямольненням каналів; го каналу, прийнятого від БС 604. AM - амплітудна модуляція; Опис бажаних втілень був поданий з тим, щоб АКОБС - амплітудне компандування з однією дати можливість фахівцям використовувати цей бічною смугою; винахід. Фахівцям стануть зрозумілими різні моПШ - псевдошумовий; дифікації цих варіантів виконання винаходу, а за 25 76087 26 27 Комп’ютерна верстка В. Мацело 76087 Підписне 28 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП ―Український інститут промислової власності‖, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for synchronizing base stations (variants); base station; device for synchronizing timing pulse generators of base stations; system for synchronizing timing pulse generators of base stations (variants)
Назва патенту російськоюУстройство для синхронизации базовых станций (варианты); базовая станция; устройство для синхронизации генераторов тактовых импульсов базовых станций; система синхронизации генераторов тактовых импульсов базовых станций (варианты)
МПК / Мітки
МПК: H04B 7/00
Мітки: базова, синхронізації, синхронізуючих, базової, станції, імпульсів, імпул, станція, система, варіанти, генераторів, пристрій
Код посилання
<a href="https://ua.patents.su/14-76087-pristrijj-dlya-sinkhronizaci-bazovo-stanci-varianti-bazova-stanciya-pristrijj-dlya-sinkhronizaci-generatoriv-sinkhronizuyuchikh-impulsiv-bazovo-stanci-sistema-dlya-sinkhronizaci-ge.html" target="_blank" rel="follow" title="База патентів України">Пристрій для синхронізації базової станції (варіанти), базова станція, пристрій для синхронізації генераторів синхронізуючих імпульсів базової станції, система для синхронізації генераторів синхронізуючих імпул</a>
Спосіб синхронізації другої базової станції з першою базовою станцією (варіанти), пристрій для часової синхронізації другої базової станції з першою базовою станцією, спосіб синхронізації базової станції з безп
Номер патенту: 67758
Опубліковано: 15.07.2004
Автори: Вітлі Чарльз Е. ІІІ, Тідеманн Едвард Г., мол.
МПК: H04Q 7/00, H04L 27/00, H04B 1/00
Мітки: базової, часової, базовою, безп, першою, варіанти, синхронізації, пристрій, станцією, спосіб, другої, станції
Формула / Реферат:
1. Спосіб синхронізації другої базової станції з першою базовою станцією, який включає операції:- вимірювання повної часової затримки на проходження передач від першої базової станції до мобільної станції, яка має зв'язок з цією першою базовою станцією, і назад від цієї мобільної станції до цієї першої базової станції,- передачі інформації від першої базової станції до другої базової станції для допомоги другій базовій станції...
Спосіб визначення швидкості зворотного каналу у системі безпровідного зв’язку, пристрій для реалізації цього способу, віддалена станція (варіанти) та базова станція (варіанти)
Номер патенту: 73737
Опубліковано: 15.09.2005
Автори: Бендер Пол І., Кармі Гаді, Падовані Роберто, Гроб Мет'ю Ст'юарт
МПК: H04Q 7/38, H04B 7/26, H04L 1/00
Мітки: пристрій, станція, визначення, цього, варіанти, віддалена, каналу, спосіб, системі, безпровідного, базова, зв'язку, реалізації, зворотного, швидкості, способу
Формула / Реферат:
1. Спосіб визначення швидкості передачі зворотного каналу зазначеної віддаленої станції у системі зв'язку, де кожна базова станція, що підтримує зв'язок з віддаленою станцією, передає біт зайнятості зворотного каналу, який вказує, чи є вичерпаною пропускна здатність зворотного каналу, який включає:визначення швидкості передачі зворотного каналу згідно з об'єднаним сигналом зайнятості зворотного каналу, сформованим згідно з бітами...
Спосіб обробки сигнальних повідомлень у підсистемі базової станції системи безпровідного зв’язку (варіанти), підсистема базової станції та контролер базової станції
Номер патенту: 70282
Опубліковано: 15.10.2004
Автори: Роббінс Беррі Р., Ейгр Деніел Г., Спарц Майкл К.
МПК: H04Q 7/30, H04Q 7/22, H04B 7/26
Мітки: базової, спосіб, зв'язку, повідомлень, системі, варіанти, безпровідного, підсистема, станції, підсистемі, обробки, контролер, сигнальних
Формула / Реферат:
1. Спосіб обробки сигнальних повідомлень у підсистемі базової станції системи безпровідного зв'язку, який включає операції:а) прозорого транспортування сигнальних повідомлень з частини, призначеної для прямої передачі, прийнятих від абонентського пристрою до мобільного комутаційного центра Глобальної Системи Мобільного зв'язку (ГСМ); б) внутрішньої обробки сигнальних повідомлень паралельного доступу з кодовим ущільненням...
Спосіб контролю каналу, базова станція, віддалена станція та пристрій для його здійснення
Номер патенту: 66928
Опубліковано: 15.06.2004
Автори: Тідеманн Едвард Г., мол., Джоу Ю-Чен
МПК: H04B 17/00, H04B 7/005
Мітки: пристрій, віддалена, базова, станція, здійснення, контролю, спосіб, каналу
Формула / Реферат:
1. Спосіб контролю каналу, переданого в режимі переривчастої передачі, який включає: визначення, чи є кадр для передачі порожнім, і передачу контрольного кадру для кадру, де контрольний кадр не є порожнім кадром.2. Спосіб за п. 1, який відрізняється тим, що включає: передачу контрольного кадру, який містить заздалегідь визначені біти, відомі мобільній станції, і передається з найнижчою швидкістю передачі даних, узгодженою між базовою...
Спосіб передачі потоку інформаційних байтів (варіанти), пристрій абонентської станції, пристрій базової станції та пристрій для здійснення способу
Номер патенту: 68457
Опубліковано: 16.08.2004
Автори: Ейброл Нішел, Люнг Ніколай К.Н.
МПК: H04L 12/28
Мітки: потоку, базової, байтів, передачі, станції, абонентської, пристрій, інформаційних, здійснення, варіанти, способу, спосіб
Формула / Реферат:
1. Спосіб передачі потоку інформаційних байтів, який включає операції:прийому повідомлення, що визначає оцінку часу проходження сигналу в обох напрямках (ЧПОН) для протоколу радіозв’язку (ПР), іпроведення сеансу зв'язку ПР з використанням зазначеної оцінки ЧПОН для визначення часових параметрів повідомлення з негативним підтвердженням (НП).2. Спосіб за п. 1, який відрізняється тим, що зазначене повідомлення є...
Попередній патент: Циліндричний замок з рознімними стопорними дисками та плоский ключ до нього
Наступний патент: N-ціанометилові аміди як інгібітори протеази
Випадковий патент: Роликовий пристрій в установці безперервного розливу металу та спосіб його охолоджування