Групування пілот-сигналів і керування наборами в системах зв’язку з множиною несучих

Формула / Реферат
1. Спосіб безпровідного зв'язку, що містить
прийом множини пілот-сигналів, асоційованих із сектором, причому кожний пілот-сигнал має ідентифікатор групи;
при цьому ідентифікатор групи присвоюють кожному пілот-сигналу, основаному на зоні покриття пілот-сигналу, таким чином, що пілот-сигналам, які мають порівнянні зони покриття, присвоюють однаковий ідентифікатор групи;
групування пілот-сигналів в одну або більше груп пілот-сигналів відповідно до ідентифікаторів груп пілот-сигналів; і
вибір одного з одержаної множини пілот-сигналів як репрезентативного пілот-сигналу для кожної пілот-групи пілот-сигналів для передачі повідомлення про рівень пілот-сигналу, при цьому пілот-сигнали в кожній пілот-групі характеризуються різними частотами в системі зв'язку з множиною несучих.
2. Спосіб за п. 1, що додатково містить вимірювання рівня репрезентативного пілот-сигналу.
3. Спосіб за п. 2, що додатково містить передачу повідомлення про рівень репрезентативного пілот-сигналу до мережі доступу, якщо рівень репрезентативного пілот-сигналу перевищує попередньо визначений поріг.
4. Спосіб за п. 2, що додатково містить передачу повідомлення про рівень репрезентативного пілот-сигналу до мережі доступу, якщо рівень репрезентативного пілот-сигналу спадає нижче попередньо визначеного порога.
5. Спосіб за п. 1, у якому ідентифікатор групи включає в себе зсув PN.
6. Спосіб за п. 1, у якому пілот-сигналам з по суті однаковою зоною покриття присвоюють загальний ідентифікатор групи;
додатково містить передачу кожного пілот-сигналу з ідентифікатором групи.
7. Спосіб за п. 6, у якому ідентифікатор групи містить у собі зсув PN.
8. Спосіб за п. 1, у якому зона покриття пілот-сигналу основана на профілі залежності рівня від відстані пілот-сигналу.
9. Спосіб безпровідного зв'язку, що містить
вибір пілот-сигналу з множини пілот-сигналів, які мають загальний ідентифікатор групи, причому пілот-сигнали асоційовані із сусіднім сектором,
при цьому загальний ідентифікатор групи присвоюють кожному пілот-сигналу, основаному на зоні покриття пілот-сигналу, таким чином, що пілот-сигналам, які мають порівнянні зони покриття, присвоюють однаковий ідентифікатор групи; і
зона покриття пілот-сигналу основана на профілі залежності рівня від відстані пілот-сигналу; і
широкомовну передачу вибраного пілот-сигналу.
10. Пристрій безпровідного зв'язку, що містить процесор, конфігурований для
прийому множини пілот-сигналів, асоційованих із сектором, причому кожний пілот-сигнал має ідентифікатор групи;
при цьому ідентифікатор групи присвоюють кожному пілот-сигналу, основаному на зоні покриття пілот-сигналу, таким чином, що пілот-сигналам, які мають порівнянні зони покриття, присвоюють однаковий ідентифікатор групи;
групування пілот-сигналів в одну або більше груп пілот-сигналів відповідно до ідентифікаторів груп пілот-сигналів; і
вибору одного з одержаної множини пілот-сигналів як репрезентативного пілот-сигналу для кожної пілот-групи пілот-сигналів для передачі повідомлення про рівень пілот-сигналу, при цьому пілот-сигнали в кожній пілот-групі характеризуються різними частотами в системі зв'язку з множиною несучих.
11. Пристрій за п. 10, у якому ідентифікатор групи містить у собі зсув PN.
12. Пристрій за п. 10, у якому процесор додатково конфігурований для вимірювання рівня репрезентативного пілот-сигналу.
13. Пристрій за п. 10, у якому
пілот-сигналам з по суті однаковою зоною покриття присвоюють загальний ідентифікатор групи;
вказаний процесор сконфігурований для передачі кожного пілот-сигналу з ідентифікатором групи.
14. Пристрій за п. 10, у якому зона покриття пілот-сигналу основана на профілі залежності рівня від відстані пілот-сигналу.
15. Пристрій безпровідного зв'язку, що містить
приймальний блок, виконаний з можливістю прийому множини пілот-сигналів, асоційованих із сектором, причому кожний пілот-сигнал має ідентифікатор групи;
при цьому ідентифікатор групи присвоюють кожному пілот-сигналу, основаному на зоні покриття пілот-сигналу, таким чином, що пілот-сигналам, які мають порівнянні зони покриття, присвоюють однаковий ідентифікатор групи;
блок групування, виконаний з можливістю групування пілот-сигналів в одну або більше груп пілот-сигналів відповідно до ідентифікаторів груп пілот-сигналів; і
блок вибору, виконаний з можливістю вибору одного з одержаної множини пілот-сигналів як репрезентативного пілот-сигналу для кожної пілот-групи пілот-сигналів для передачі повідомлення про рівень пілот-сигналу, при цьому пілот-сигнали в кожній пілот-групі характеризуються різними частотами в системі зв'язку з множиною несучих.
16. Пристрій за п. 15, що додатково містить блок вимірювання, виконаний з можливістю вимірювання рівня репрезентативного пілот-сигналу.
17. Пристрій за п. 16, що додатково містить блок повідомлення, виконаний з можливістю передачі повідомлення про рівень репрезентативного пілот-сигналу в мережу доступу.
18. Пристрій безпровідного зв'язку за п. 15,
у якому пілот-сигналам з по суті однаковою зоною покриття присвоюють загальний ідентифікатор групи;
який додатково містить процесор, виконаний з можливістю передачі кожного пілот-сигналу з ідентифікатором групи.
19. Пристрій за п. 18, у якому ідентифікатор групи містить у собі зсув PN.
20. Пристрій за п. 15, у якому зона покриття пілот-сигналу основана на профілі залежності рівня від відстані пілот-сигналу.
21. Пристрій безпровідного зв'язку, що містить
блок присвоєння ІД групи, виконаний з можливістю присвоєння ідентифікатора групи кожному з множини пілот-сигналів, асоційованих із сектором, присвоєння основане на зоні покриття кожного пілот-сигналу; при цьому кожному пілот-сигналу з по суті однаковою зоною покриття присвоюють загальний ідентифікатор групи;
зона покриття пілот-сигналу основана на профілі залежності рівня від відстані пілот-сигналу; і
передавальний блок, виконаний з можливістю передачі кожного пілот-сигналу з ідентифікатором групи.
22. Пристрій безпровідного зв'язку, що містить процесор, конфігурований для
вибору пілот-сигналу з множини пілот-сигналів, що мають загальний ідентифікатор групи, причому пілот-сигнали асоційовані із сусіднім сектором; і
при цьому загальний ідентифікатор групи присвоюють кожному пілот-сигналу, основаному на зоні покриття пілот-сигналу, таким чином, що пілот-сигналам, які мають порівнянні зони покриття, присвоюють однаковий ідентифікатор групи; і
зона покриття пілот-сигналу основана на профілі залежності рівня від відстані пілот-сигналу; і
широкомовної передачі вибраного пілот-сигналу.
23. Комп'ютерночитаний носій, який містить виконувані інструкції, які містять:
код для прийому множини пілот-сигналів, асоційованих із сектором, причому кожний пілот-сигнал має ідентифікатор групи;
при цьому зона покриття пілот-сигналу основана на профілі залежності рівня від відстані пілот-сигналу;
код для групування пілот-сигналів в одну або більше груп пілот-сигналів відповідно до ідентифікаторів груп пілот-сигналів;
код для вибору репрезентативного пілот-сигналу для кожної пілот-групи з пілот-сигналів для передачі повідомлення про рівень пілот-сигналу, при цьому пілот-сигнали в кожній пілот-групі характеризуються різними частотами в системі зв'язку з множиною несучих.
24. Комп'ютерночитаний носій за п. 23, у якому пілот-сигналам з по суті однаковою зоною покриття присвоюють загальний ідентифікатор групи;
додатково містить код для передачі кожного пілот-сигналу з ідентифікатором групи.
25. Комп'ютерночитаний носій за п. 23, що додатково містить: код для вимірювання рівня репрезентативного пілот-сигналу; і
код для передачі повідомлення про рівень репрезентативного сигналу в мережу доступу.
26. Комп'ютерночитаний носій, що містить виконувані інструкції, які містять:
код для вибору пілот-сигналу з множини пілот-сигналів, що мають загальний ідентифікатор групи, причому пілот-сигнали асоційовані із сусіднім сектором,
при цьому загальний ідентифікатор групи присвоюють кожному пілот-сигналу, основаному на зоні покриття пілот-сигналу, таким чином, що пілот-сигналам, які мають порівнянні зони покриття, присвоюють однаковий ідентифікатор групи; і
зона покриття пілот-сигналу основана на профілі залежності рівня від відстані пілот-сигналу; і
код для широкомовної передачі вибраного пілота-сигналу.
Текст
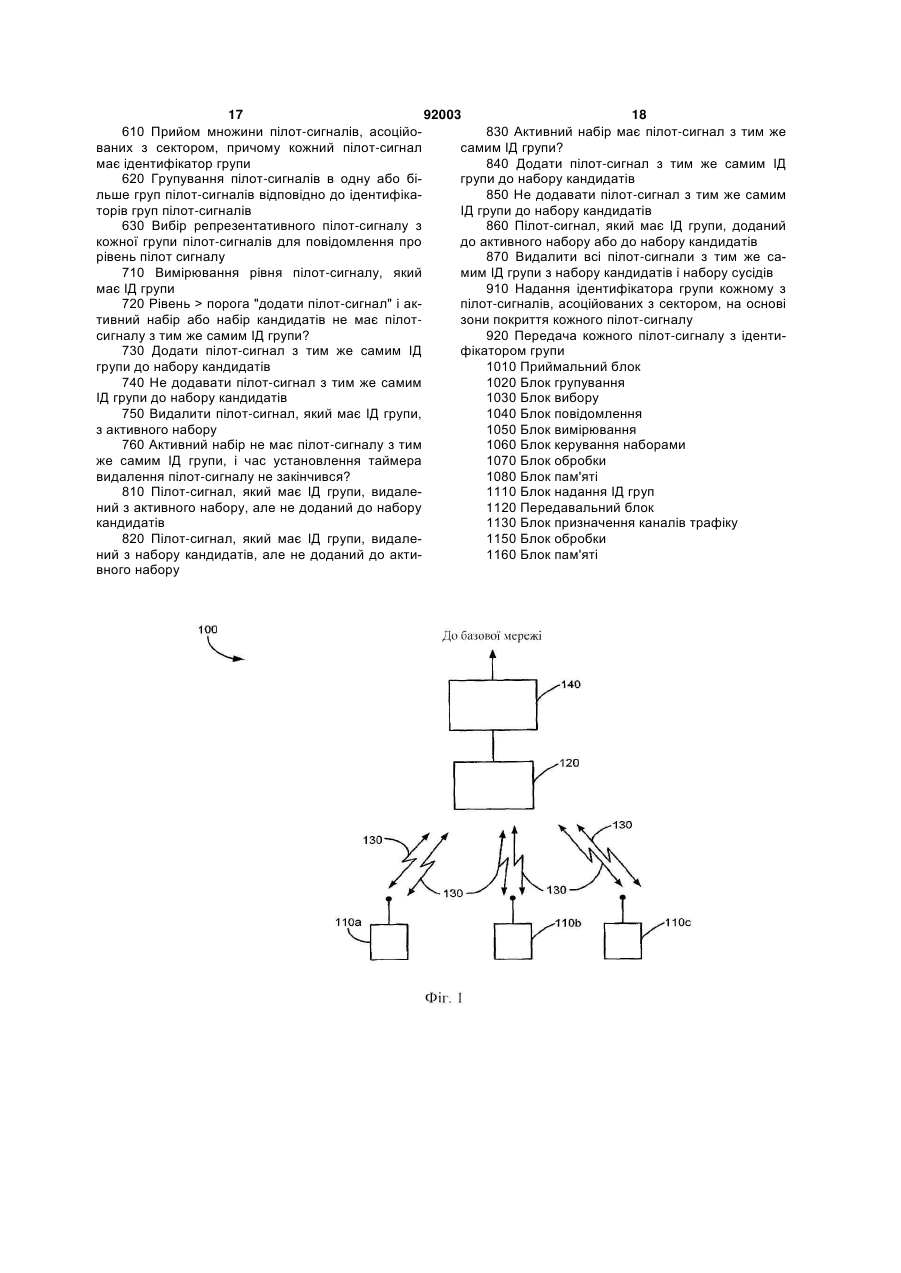
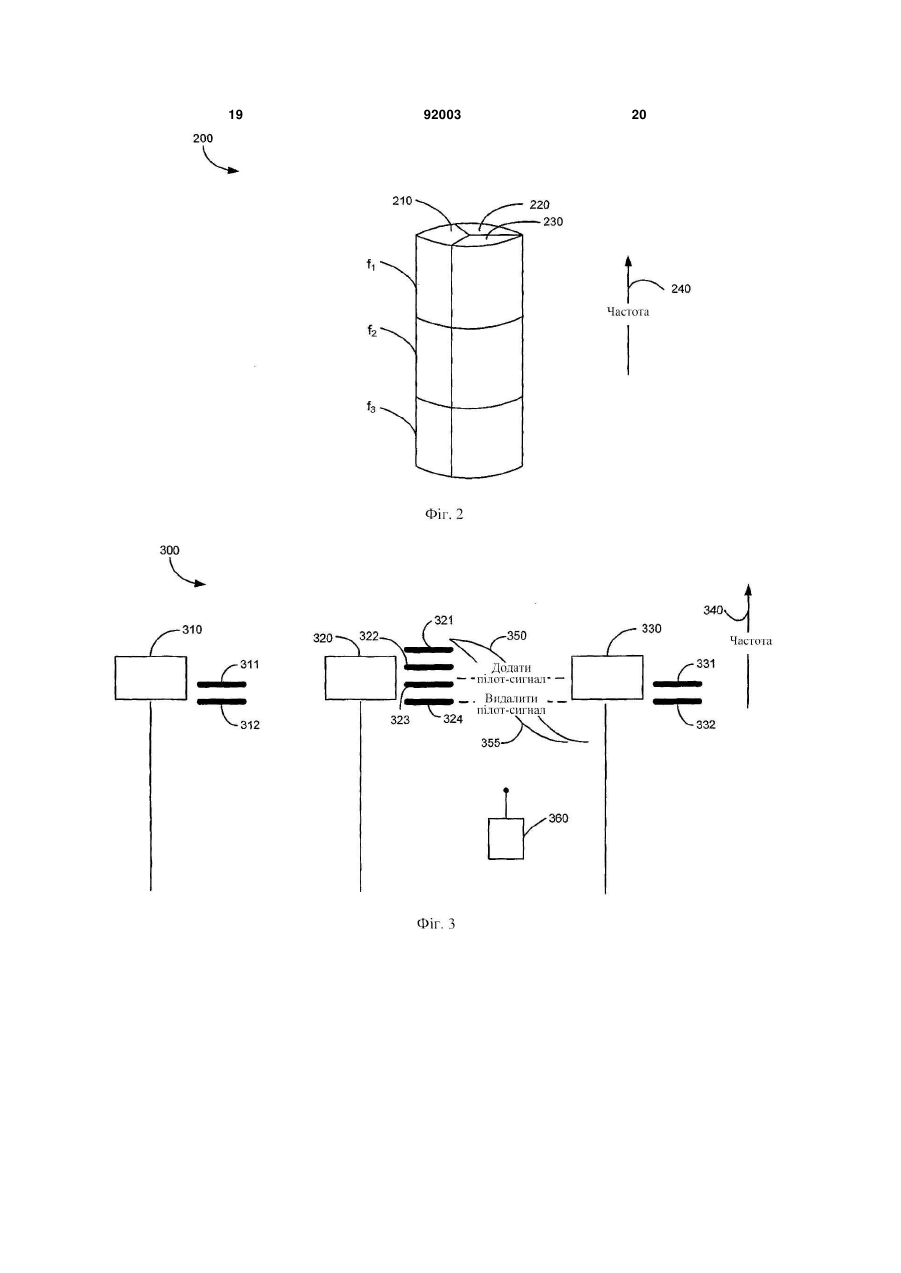
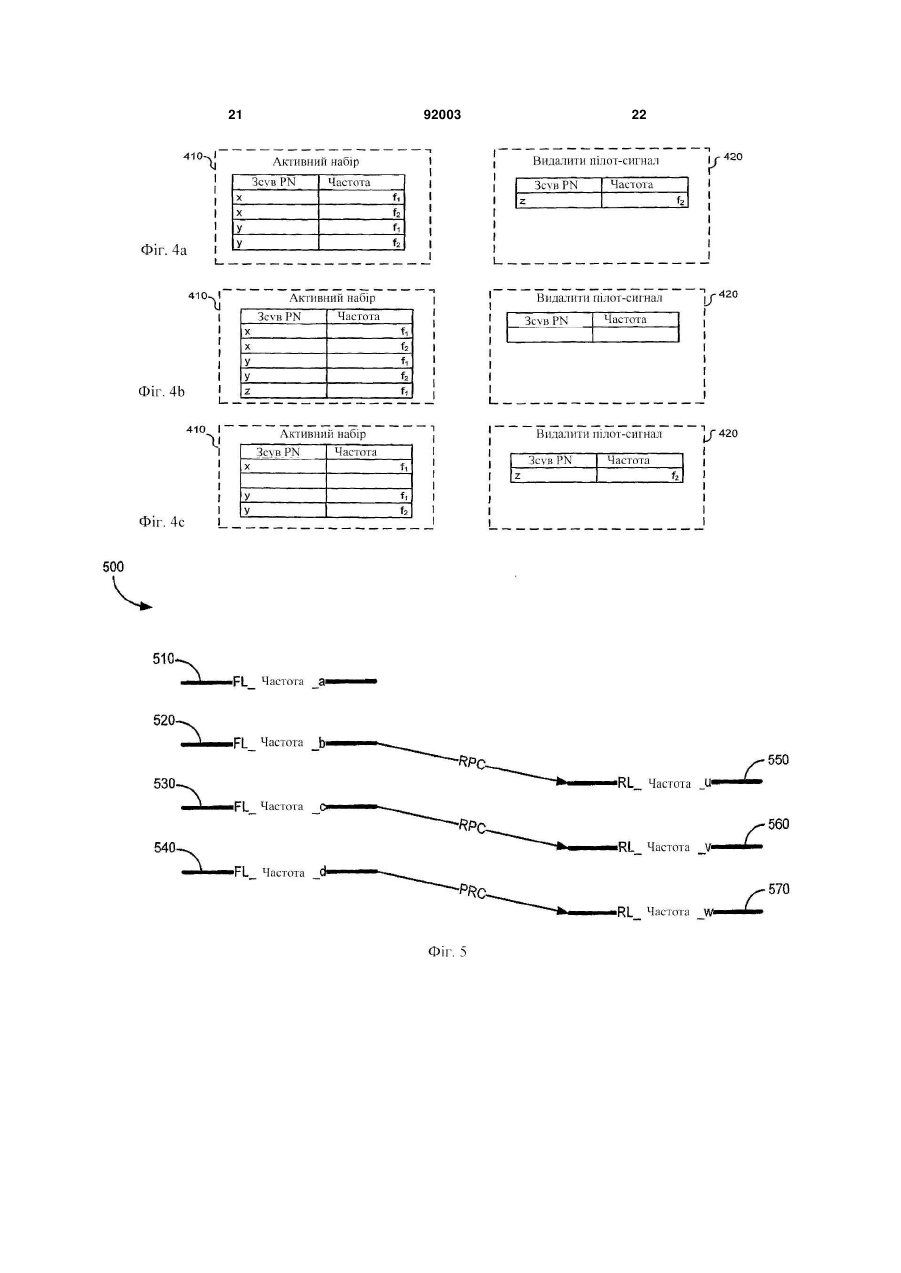
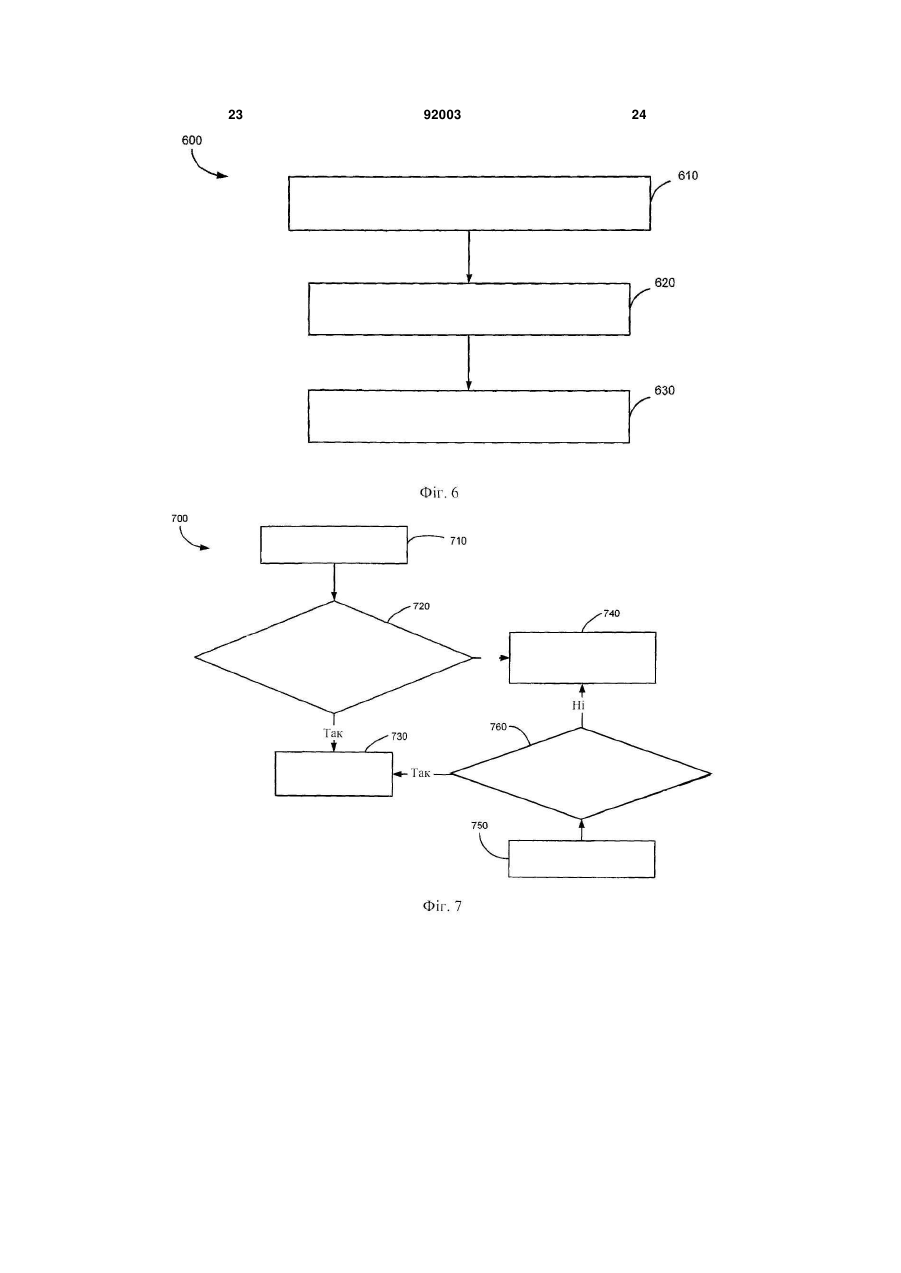
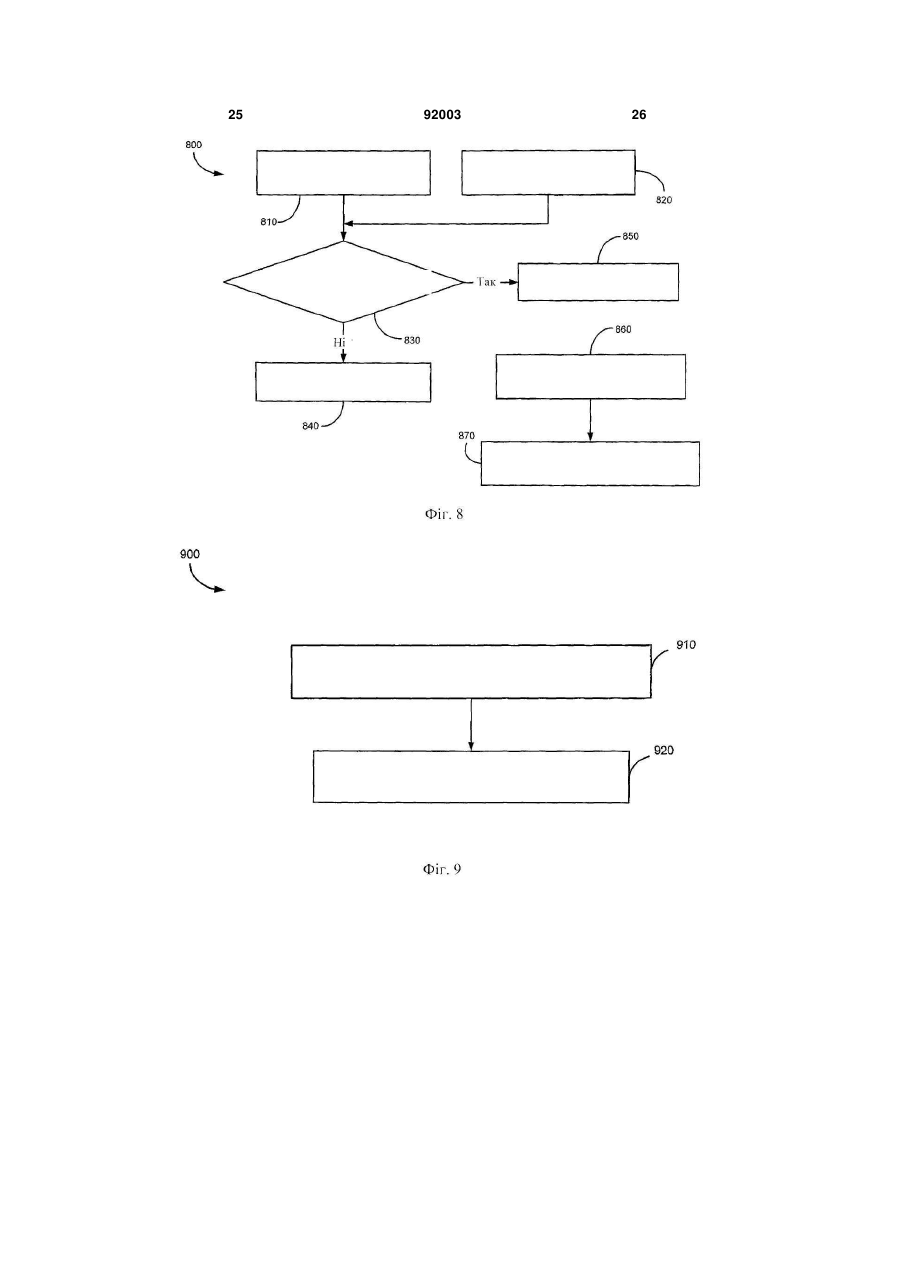
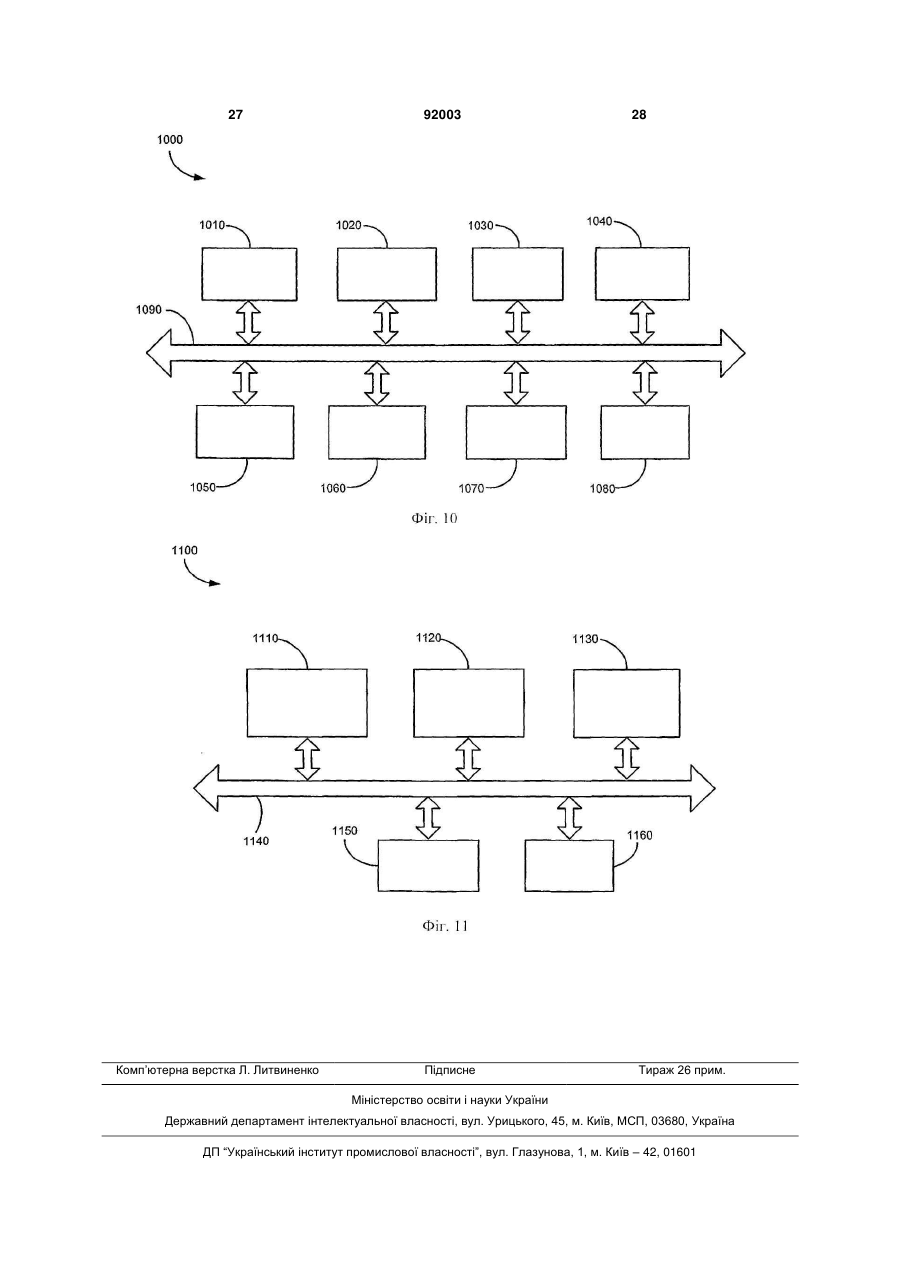
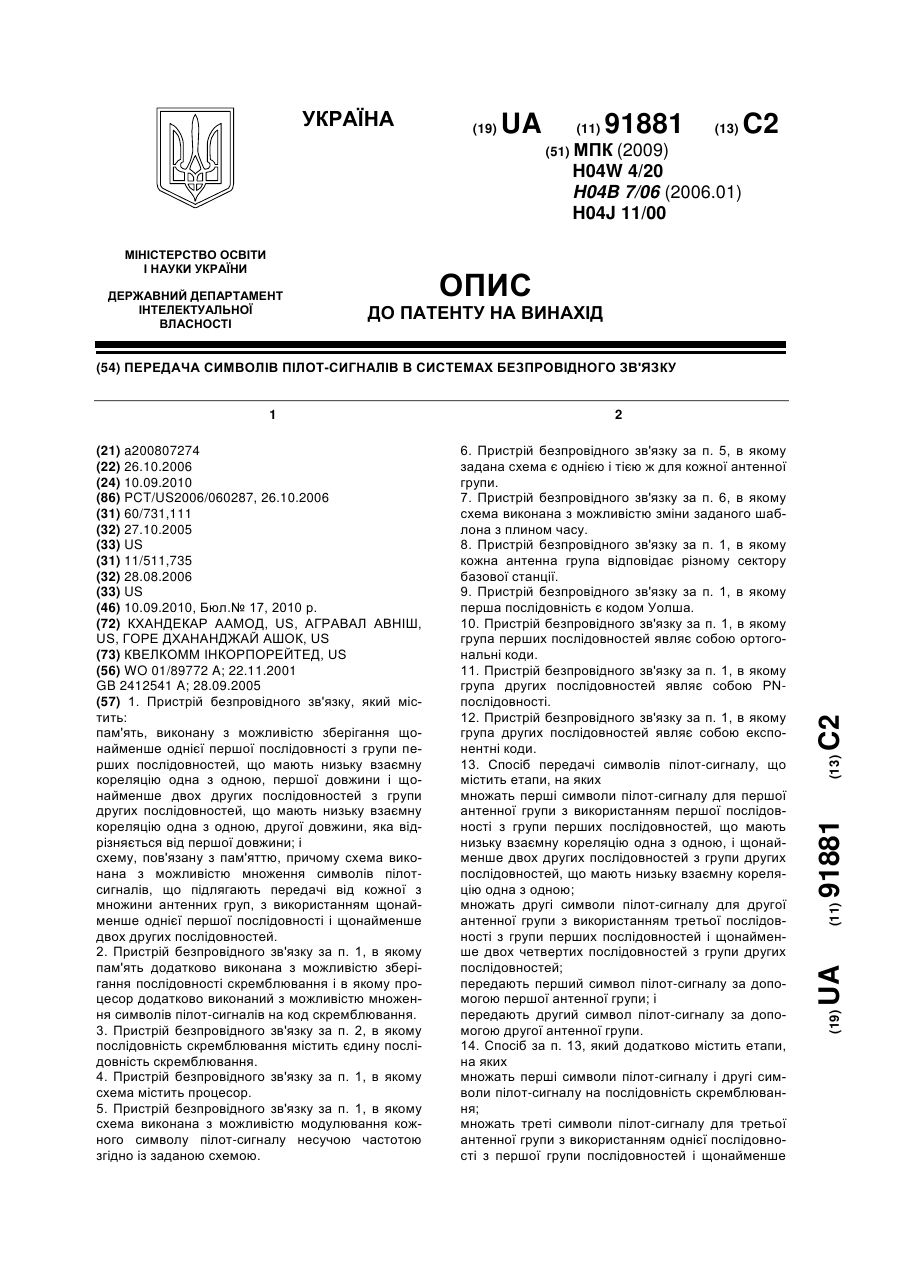
1. Спосіб безпровідного зв'язку, що містить прийом множини пілот-сигналів, асоційованих із сектором, причому кожний пілот-сигнал має ідентифікатор групи; при цьому ідентифікатор групи присвоюють кожному пілот-сигналу, основаному на зоні покриття пілот-сигналу, таким чином, що пілот-сигналам, які мають порівнянні зони покриття, присвоюють однаковий ідентифікатор групи; групування пілот-сигналів в одну або більше груп пілот-сигналів відповідно до ідентифікаторів груп пілот-сигналів; і вибір одного з одержаної множини пілот-сигналів як репрезентативного пілот-сигналу для кожної пілот-групи пілот-сигналів для передачі повідомлення про рівень пілот-сигналу, при цьому пілотсигнали в кожній пілот-групі характеризуються різними частотами в системі зв'язку з множиною несучих. 2. Спосіб за п. 1, що додатково містить вимірювання рівня репрезентативного пілот-сигналу. 2 (19) 1 3 92003 4 вибору одного з одержаної множини пілот-сигналів присвоєння основане на зоні покриття кожного як репрезентативного пілот-сигналу для кожної пілот-сигналу; при цьому кожному пілот-сигналу з пілот-групи пілот-сигналів для передачі повідомпо суті однаковою зоною покриття присвоюють лення про рівень пілот-сигналу, при цьому пілотзагальний ідентифікатор групи; сигнали в кожній пілот-групі характеризуються різзона покриття пілот-сигналу основана на профілі ними частотами в системі зв'язку з множиною незалежності рівня від відстані пілот-сигналу; і сучих. передавальний блок, виконаний з можливістю пе11. Пристрій за п. 10, у якому ідентифікатор групи редачі кожного пілот-сигналу з ідентифікатором містить у собі зсув PN. групи. 12. Пристрій за п. 10, у якому процесор додатково 22. Пристрій безпровідного зв'язку, що містить конфігурований для вимірювання рівня репрезенпроцесор, конфігурований для тативного пілот-сигналу. вибору пілот-сигналу з множини пілот-сигналів, що 13. Пристрій за п. 10, у якому мають загальний ідентифікатор групи, причому пілот-сигналам з по суті однаковою зоною покритпілот-сигнали асоційовані із сусіднім сектором; і тя присвоюють загальний ідентифікатор групи; при цьому загальний ідентифікатор групи присвовказаний процесор сконфігурований для передачі юють кожному пілот-сигналу, основаному на зоні кожного пілот-сигналу з ідентифікатором групи. покриття пілот-сигналу, таким чином, що пілот14. Пристрій за п. 10, у якому зона покриття пілотсигналам, які мають порівнянні зони покриття, сигналу основана на профілі залежності рівня від присвоюють однаковий ідентифікатор групи; і відстані пілот-сигналу. зона покриття пілот-сигналу основана на профілі 15. Пристрій безпровідного зв'язку, що містить залежності рівня від відстані пілот-сигналу; і приймальний блок, виконаний з можливістю приширокомовної передачі вибраного пілот-сигналу. йому множини пілот-сигналів, асоційованих із сек23. Комп'ютерночитаний носій, який містить викотором, причому кожний пілот-сигнал має ідентифінувані інструкції, які містять: катор групи; код для прийому множини пілот-сигналів, асоційопри цьому ідентифікатор групи присвоюють кожваних із сектором, причому кожний пілот-сигнал ному пілот-сигналу, основаному на зоні покриття має ідентифікатор групи; пілот-сигналу, таким чином, що пілот-сигналам, які при цьому зона покриття пілот-сигналу основана мають порівнянні зони покриття, присвоюють одна профілі залежності рівня від відстані пілотнаковий ідентифікатор групи; сигналу; блок групування, виконаний з можливістю групукод для групування пілот-сигналів в одну або бівання пілот-сигналів в одну або більше груп пілотльше груп пілот-сигналів відповідно до ідентифікасигналів відповідно до ідентифікаторів груп пілотторів груп пілот-сигналів; сигналів; і код для вибору репрезентативного пілот-сигналу блок вибору, виконаний з можливістю вибору оддля кожної пілот-групи з пілот-сигналів для переного з одержаної множини пілот-сигналів як репредачі повідомлення про рівень пілот-сигналу, при зентативного пілот-сигналу для кожної пілот-групи цьому пілот-сигнали в кожній пілот-групі характепілот-сигналів для передачі повідомлення про ріризуються різними частотами в системі зв'язку з вень пілот-сигналу, при цьому пілот-сигнали в комножиною несучих. жній пілот-групі характеризуються різними часто24. Комп'ютерночитаний носій за п. 23, у якому тами в системі зв'язку з множиною несучих. пілот-сигналам з по суті однаковою зоною покрит16. Пристрій за п. 15, що додатково містить блок тя присвоюють загальний ідентифікатор групи; вимірювання, виконаний зможливістю вимірювандодатково містить код для передачі кожного пілотня рівня репрезентативного пілот-сигналу. сигналу з ідентифікатором групи. 17. Пристрій за п. 16, що додатково містить блок 25. Комп'ютерночитаний носій за п. 23, що додатповідомлення, виконаний з можливістю передачі ково містить: код для вимірювання рівня репрезеповідомлення про рівень репрезентативного пілотнтативного пілот-сигналу; і сигналу в мережу доступу. код для передачі повідомлення про рівень репре18. Пристрій безпровідного зв'язку за п. 15, зентативного сигналу в мережу доступу. у якому пілот-сигналам з по суті однаковою зоною 26. Комп'ютерночитаний носій, що містить виконупокриття присвоюють загальний ідентифікатор вані інструкції, які містять: групи; код для вибору пілот-сигналу з множини пілотякий додатково містить процесор, виконаний з сигналів, що мають загальний ідентифікатор груможливістю передачі кожного пілот-сигналу з іденпи, причому пілот-сигнали асоційовані із сусіднім тифікатором групи. сектором, 19. Пристрій за п. 18, у якому ідентифікатор групи при цьому загальний ідентифікатор групи присвомістить у собі зсув PN. юють кожному пілот-сигналу, основаному на зоні 20. Пристрій за п. 15, у якому зона покриття пілотпокриття пілот-сигналу, таким чином, що пілотсигналу основана на профілі залежності рівня від сигналам, які мають порівнянні зони покриття, відстані пілот-сигналу. присвоюють однаковий ідентифікатор групи; і 21. Пристрій безпровідного зв'язку, що містить зона покриття пілот-сигналу основана на профілі блок присвоєння ІД групи, виконаний з можливістю залежності рівня від відстані пілот-сигналу; і присвоєння ідентифікатора групи кожному з мнокод для широкомовної передачі вибраного пілотажини пілот-сигналів, асоційованих із сектором, сигналу. 5 Дана заявка запитує пріоритет відповідно до попередньої заявки США № 60/659856, озаглавленої «Повідомлення про рівень пілот-сигналів і керування активним набором і наборами кандидатів і сусідів в системі з множиною несучих», поданої 8 березня 2005 p., переуступленої правонаступнику даного винаходу і включеної в даний опис за допомогою посилання. Галузь техніки Дане розкриття належить до безпровідних систем зв'язку. Більш конкретно, розкриті варіанти здійснення належать до групування пілот-сигналів і передачі повідомлень і до керування наборами в системах зв'язку з множиною несучих. Попередній рівень техніки Безпровідні системи зв'язку широко використовуються для забезпечення різних типів передач (мовлення, даних і т. д.) множині користувачів. Такі системи можуть бути основані на методах множинного доступу з кодовим розділенням каналів (CDMA), множинного доступу з часовим розділенням каналів (TDMA), множинного доступу з частотним розділенням каналів (FDMA) або інших методах множинного доступу. Системи CDMA забезпечують деякі бажані властивості, включаючи збільшену пропускну здатність системи. Система CDMA може бути спроектована для реалізації одного або більше стандартів, таких як IS-95, cdma2000, IS-856, W-CDMA, TD-SCDMA і інші стандарти. У відповідь на збільшувані потреби в мультимедійних послугах і високошвидкісній передачі даних для використання в безпровідних системах зв'язку запропонована модуляція з множиною несучих. Проблема полягає в забезпеченні ефективних і надійних систем зв'язку з множиною несучих. Короткий опис креслень Фіг.1 - варіант здійснення системи з множиною несучих; Фіг.2 - варіант здійснення комірки з множиною секторів в системі зв'язку з множиною несучих; Фіг.3 - варіант здійснення різних секторів і асоційованих пілот-сигналів в системі зв'язку з множиною несучих; Фіг.4а-4с - варіант здійснення керування наборами в системі зв'язку з множиною несучих; Фіг.5 - варіант здійснення призначення каналів трафіку в системі зв'язку з множиною несучих; Фіг.6 - блок-схема процесу, який може бути використаний в одному варіанті здійснення для реалізації групування пілот-сигналів і передачі повідомлень в системі зв'язку з множиною несучих; Фіг.7 - блок-схема процесу, який може бути використаний в одному варіанті здійснення для реалізації керування наборами в системі зв'язку з множиною несучих; Фіг.8 - блок-схема процесу, який може бути використаний в іншому варіанті здійснення для реалізації керування наборами в системі зв'язку з множиною несучих; Фіг.9 - блок-схема процесу, який може бути використаний в одному варіанті здійснення для реалізації групування пілот-сигналів в системі зв'язку з множиною несучих; 92003 6 Фіг.10 - блок-схема пристрою, в якому можуть бути реалізовані деякі розкриті варіанти здійснення; і Фіг.11 - блок-схема пристрою, в якому можуть бути реалізовані деякі розкриті варіанти здійснення. Докладний опис винаходу Варіанти здійснення, розкриті в даному описі, належать до способів і пристроїв для групування пілот-сигналів і використання такого групування для повідомлення про рівень пілот-сигналу і для керування наборами в системі зв'язку з множиною несучих. Фіг.1 ілюструє варіант здійснення системи 100 зв'язку з множиною несучих. Наприклад, в межах системи можуть бути розподілені різні термінали доступу (AT) 110, включаючи AT 110а-110с. Кожний термінал AT 110 може здійснювати зв'язок з мережею 120 доступу (AN) через один або більше каналів на різних частотах по прямій лінії зв'язку і/або зворотній лінії зв'язку в даний момент часу, як показано двоспрямованими стрілками 130. Для ілюстрації і ясності для кожного термінала AT 110 показані дві двоспрямовані стрілки 130. Може бути будь-яке число каналів (або частот) як в прямій лінії зв'язку, так і в зворотній лінії зв'язку в системі зв'язку. Крім того, число частот, що використовуються в прямій лінії зв'язку (або «частот прямої лінії зв'язку»), не обов'язково повинно бути тим же, що і число частот в зворотній лінії зв'язку (або «частот зворотної лінії зв'язку»). Мережа AN 120 може додатково здійснювати зв'язок з базовою мережею, такою як мережа пакетних даних, через обслуговуючий вузол 140 передачі пакетних даних (PDSN). У одному варіанті здійснення система 100 може бути конфігурована для підтримання одного або більше стандартів, наприклад, IS-95, cdma2000, IS-856, W-CDMA, TDSCDMA, інших стандартів зв'язку з множиною несучих або їх комбінацій. Як описано в даному документі, мережа AN може належати до частини системи зв'язку, конфігурованої для взаємодії з базовою мережею (наприклад, мережею пакетних даних через мережу PDSN 140 на Фіг.1) і маршрутизації даних між терміналами AT і базовою мережею, виконання різних функцій радіодоступу і підтримання ліній зв'язку, керування радіопередавачами і приймачами і т. д. Мережа AN може включати в себе і/або реалізовувати функції контролера базової станції (BSC) (як в безпровідній мережі 2-го і 3-го поколінь), приймально-передавальної системи базової станції (BTS), вузла доступу (АР), приймача-передавача пулу модемів (МРТ), вузла В (наприклад, в системі типу W-CDMA) і т. п. Термінал AT, описаний в цьому документі, може належати до різних типів пристроїв, включаючи (без обмеження вказаним) провідний телефон, безпровідний телефон, стільниковий телефон, портативний комп'ютер, карту персонального комп'ютера (PC) безпровідного зв'язку, персональний цифровий помічник (PDA), зовнішній або внутрішній модем і т. д. Термінал AT може бути будь-яким пристроєм передачі даних, який здійснює зв'язок по безпровідному каналу або по провідному кана 7 92003 8 лу (наприклад, за допомогою волоконно-оптичних терміналу AT було потрібно повідомляти про ріабо коаксіальних кабелів). Термінал AT може мати вень кожного прийнятого пілот-сигналу (як в сисрізні назви, наприклад, блок доступу, абонентсьтемі з однією несучою), це обумовило б дуже бакий блок, мобільна станція, мобільний пристрій, гато запусків для повідомлення про рівень сигналу мобільний блок, мобільний телефон, мобільний (наприклад, повідомлення оновлення маршруту в пристрій, віддалена станція, віддалений термінал, системі типу IS-856), оскільки є багато пілотвіддалений блок, користувацький пристрій, кориссигналів, і кожний з них може незалежно перетитувацьке обладнання, портативний пристрій і т. д. нати пороги, встановлені для передачі повідомРізні термінали AT можуть бути включені в систелень, внаслідок короткочасною завмирання, і кожму. Термінали AT можуть бути мобільними або не повідомлення було б більшим, оскільки є стаціонарними, і можуть бути розподілені за сисбільше пілот-сигналів для повідомлення. Крім того, темою зв'язку. Термінал AT може здійснювати багато які з цих пілот-сигналів можуть мати порівзв'язок з однією або більше мережами AN по прянянні області покриття, і повідомлення, що перемій лінії зв'язку і/або по зворотній лінії зв'язку в дається одним з них, може забезпечити достатньо будь-який даний момент. Пряма лінія зв'язку (або інформації для мережі доступу по відношенню до низхідна лінія зв'язку) належить до передач від набору пілот-сигналів, які приймає термінал AT. мережі AN до термінала AT. Зворотна лінія зв'язку Тому, існує необхідність в ефективному способі (або висхідна лінія зв'язку) належить до передач керування пілот-сигналами в системі зв'язку з від термінала AT до мережі AN. множиною несучих. Система зв'язку з множиною несучих, описана Розкриті варіанти здійснення належать до в даній заявці, може містити систему мультиплекспособів і систем для групування пілот-сигналів і сування з частотним розділенням або систему використання такого групування для повідомлення мультиплексування з ортогональним частотним про рівень пілот-сигналу і керування наборами в розділенням, або інші системи багаточастотної системі зв'язку з множиною несучих. модуляції, причому кожна несуча відповідає деУ одному варіанті здійснення мережа AN, яка якому частотному діапазону. обслуговує сектор, може надати груповий ідентиПілот-сигнал, описаний тут, може бути охаракфікатор (або «ІД групи») кожному з пілот-сигналів, теризований (або визначений) парою параметрів і пов'язаних з сектором, наприклад, на основі облапозначений як , де параметр «кастей покриття пілот-сигналів, так що пілот-сигнали, нал» належить до частоти пілот-сигналу, а параякі мають порівнянні області покриття, спільно метр «зсув PN» унікальним чином асоційований з використовують загальний ІД групи. Зсув PN може пілот-сигналом. Термін «канал» може взаємозавикористовуватися як ІД група в одному варіанті мінним чином використовуватися з терміном «часздійснення. Потім мережа AΝ передає пілоттота». Крім того, «область покриття» пілот-сигналу сигнали з відповідними ІД групи. Мережа AΝ може може належати до профілю залежності сигналу від групувати пілот-сигнали, які приймаються в одній відстані для пілот-сигналу. або більше групах пілот-сигналів. відповідно до їх Комірка може належати до області покриття, ІД групи. Мережа AΝ може також вибирати один яка обслуговується мережею AN. Комірка може пілот-сигнал з кожної групи пілот-сигналів як ребути розділена на один або більше секторів. Одна презентативний пілот-сигнал для повідомлення або більше частот можуть призначатися для покпро рівень пілот-сигналу. Мережа AΝ також може риття комірки. На Фіг.2 показаний варіант здійсвикористовувати групування пілот-сигналів для нення комірки 200 в системі зв'язку з множиною виконання ефективного керування набором, як несучих. Наприклад, комірка 200 показана як роздодатково описано нижче. ділена на три сектори 210, 220, 230. Три частоти На Фіг.3 показаний варіант здійснення різних f1, f2, f3 призначені для покриття комірки 200. Для секторів і асоційованих пілот-сигналів в системі ілюстрації і ясності, комірка 200 показана як ци300 зв'язку з множиною несучих. Система 300 моліндр, площі перерізу якого відповідають області же в загальному випадку включати в себе будь-яке покриття комірки 200, а висота по осі 240 відповічисло секторів, кожний з яких асоційований з оддає розмірності частоти комірки 200. Як такий, ним або більше пілот-сигналами, що мають різні кожний сектор циліндра (по всіх частотах) утворює частоти. Для ілюстрації і ясності в явному вигляді сектор комірки. У інших варіантах здійснення коміпоказані три сектори 3 10, 320, 330. Також для рки можуть мати різні форми, і можуть мати різне прикладу показані пілот-сигнали 311, 312, асоційочисло секторів. Також може бути будь-яке число вані з сектором 310, пілот-сигнали 321-324, асоцічастот, призначених комірці. Наприклад, в деяких йовані з сектором 320, і пілот-сигнали 331, 332, ситуаціях множина частот може бути призначена асоційовані з сектором 330. Ці пілот-сигнали покакомірці, яка охоплює велику область покриття, як зані відносно частотної осі 340, вказуючи, що піпоказано на Фіг.2. У інших ситуаціях одна частота лот-сигнали, асоційовані з даним сектором, мають може бути розподілена комірці, яка покриває малу різні частоти. область з високою щільністю (наприклад, «гарячу Фіг.3 додатково показує профіль 350 залежноточку»). сті рівня від відстані, який представляє зону покУ системі зв'язку з однією несучою потрібно, риття пілот-сигналу 321 або 322, і профіль 355 щоб термінал AT повідомляв про рівні всіх прийнзалежності рівня від відстані, який представляє ятих пілот-сигналів, оскільки пілот-сигнали стають зону покриття пілот-сигналу 323 або 324. сильними або слабими по рівню. У системі зв'язку У одному варіанті здійснення мережа AN (явно з множиною несучих є множина пілот-сигналів, не показана), яка обслуговує сектор 320, може пов'язаних з сектором, як показано на Фіг.2. Якби призначати ІД групи кожному з пілот-сигналів 321 9 92003 10 324 на основі їх областей покриття, так що пілотреміщається ближче до сектора 320, термінал AT сигнали, які мають, по суті, однакову область пок360 може спочатку послати повідомлення про ріриття, спільно використовують загальний ІД групи. вень пілот-сигналу для репрезентативного пілотЗсув FN може бути використаний як ІД групи в одсигналу, асоційованого з першою групою пілотному варіанті здійснення. Наприклад, пілотсигналів, а потім повідомлення про рівень пілотсигнали 321, 322 можуть спільно використовувати сигналу для репрезентативного пілот-сигналу, загальний ІД групи (або зсув PN); пілот-сигнали асоційованого з другою групою пілот-сигналів, в 323, 324 можуть також спільно використовувати мережу AN (в зв'язку з поступовим наростанням загальний ІД групи (або зсув PN). Мережа AΝ морівнів пілот-сигналів в цих двох групах). же потім передавати пілот-сигнали 321-324 з відДалі, пілот-сигнали в секторах 310, 330 можуть повідними ІД групи. Після прийому пілот-сигналів також групуватися аналогічним чином. Наприклад, 321-324 термінал AT 360 може групувати пілотпілот-сигнали 311, 312 в секторі 310 можуть утвосигнали 321, 322 в першу групу пілот-сигналів і рювати групу пілот-сигналів. Пілот-сигнали 331, пілот-сигнали 323, 324 у другу групу пілот-сигналів 332 в секторі 330 можуть також утворювати групу відповідно до їх ІД групи. Термінал AT 360 може пілот-сигналів. У одному варіанті здійснення секвибрати один пілот-сигнал з кожної групи як ретор 320 (або мережа AN, яка обслуговує його) мопрезентативний пілот-сигнал для групи: наприже вибрати один пілот-сигнал з кожної групи пілотклад, пілот-сигнал 321 може бути вибраний як ресигналів в сусідніх секторах 310, 330, наприклад презентативний пілот-сигнал для першої групи пілот-сигнал 311 і пілот-сигнал 332, і повідомляти пілот-сигналів, і пілот-сигнал 324 може бути вибтільки про вибрані пілот-сигнали зі своїх сусідніх раний як репрезентативний пілот-сигнал для друсекторів. гої групи пілот-сигналів. Термінал AT 360 може Групування пілот-сигналів і повідомлення про вимірювати рівень кожного прийнятого пілотних, як описано вище, дозволяє терміналам AT сигналу або щонайменше одного пілот-сигналу з здійснювати зв'язок ефективним способом в мекожної групи пілот-сигналів (такого як репрезентарежі AN в системі зв'язку з множиною несучих, тивний пілот-сигнал). Термінал AT 360 може вклюуникаючи зайвого використання мережних ресурчати тільки репрезентативний пілот-сигнал (на сів. Це додатково дозволяє терміналу AT виконупротилежність всій групі пілот-сигналів) в повідомвати керування набором ефективним чином, як лення про рівень пілот-сигналу, як описано далі. описано нижче. У варіанті, показаному на Фіг.3, два пороги піФіг.4а-4с показують варіант здійснення керулот-сигналу: «додати пілот-сигнал» і «видалити вання набором в системі зв'язку з множиною несупілот-сигнал» відмічені на профілях 350, 355. Ці чих. Для ясності і ілюстрації кожний пілот-сигнал пороги можуть бути використані для визначення визначений параметрами , де того, до якого з наборів, набору кандидатів або зсув PN також служить як ІД група для кожного набору сусідів для термінала AT 360 належить пілот-сигналу. Наприклад, Фіг.4а показує, що теркожний пілот-сигнал. Наприклад, якщо рівень пімінал AT (в явному вигляді не показаний) може лот-сигналу, який приймається терміналом AT початково мати активний набір 410, який включає 360, перевищує поріг «додати пілот-сигнал», то в себе першу групу пілот-сигналів, що мають ІД пілот-сигнал може бути потенційно доданий до групи «х», і другу групу пілот-сигналів, ідо мають набору кандидатів для термінала AT 360, як поясІД групи «у». Перша група пілот-сигналів включає нено нижче. Якщо рівень пілот-сигналу, який в себе два пілот-сигнали, визначених параметраприймається терміналом AT 360, спадає нижче ми і . і друга група пілот-сигналів порога «видалити пілот-сигнал», то пілот-сигнал включає в себе два пілот-сигнали, визначених може бути видалений з активного набору або напараметрами і . Термінал AT також бору кандидатів для термінала AT 360. може містити набір 420 кандидатів, який початково У одному варіанті здійснення, коли термінал включає в себе третю групу пілот-сигналів, що AT 360 переміщається з сектора 320, він може мають ІД групи «z». Третя група пілот-сигналів має спочатку виявити, що рівні пілот-сигналів 323, 324 один пілот-сигнал, визначений параметрами . Кожний пілот-сигнал або в активному наборі га «видалити пілот-сигнал», і потім виявити рівні 410, або в наборі 420 кандидатів, має рівень вище пілот-сигналів 321, 322 в першій групі пілотпопередньо визначеного порога (наприклад, поросигналів. (Це може бути тому, що пілот-сигнали га «додати пілот-сигнал», описаного вище з поси321, 322 не мають відповідних цим сигналів в сусіланням на Фіг.3). дніх секторах 310, 330, отже, схильні до менших Фіг.4b показує, що в одному випадку пілотвзаємних перешкод). У результаті термінал AT 360 сигнал,визначений параметрами , додаєтьможе спочатку послати повідомлення про рівень ся до активного набору 410. У результаті пілотпілот-сигналу для репрезентативного пілотсигнал з параметрами видаляється з набосигналу, асоційованого з другою групою пілотру 420 кандидатів, оскільки обидва повинні налесигналів, а потім повідомлення про рівень пілотжати до однієї і тієї ж групи пілот-сигналів. сигналу для репрезентативного пілот-сигналу, Фіг.4с показує, що в іншому випадку пілотасоційованого з першою групою пілот-сигналів, в сигнал, визначений параметрами , видалямережу AN у зв'язку з цими двома подіями. Повіється з активного набору 410 і не додасться до домлення про рівень пілот-сигналу може включати набору 420 кандидатів. Це пояснюється тим, що в себе, наприклад, рівень, зсув PN і частоту відпозалишається інший пілот-сигнал, визначений павідного репрезентативного пілот-сигналу. У іншораметрами , що належить до першої групи му варіанті здійснення, коли термінал AT 360 пепілот-сигналів в активному наборі 410. 11 92003 12 У принципі, термінал AT може обслуговуватипілот-сигнал з тим же самим ІД групи (що і у видася будь-яким з пілот-сигналів в його активному леного пілот-сигналу) до набору сусідів. наборі. Кожна група пілот-сигналів в його активноГрупування пілот-сигналів, розкрите в даному му наборі може включати в себе один або більше описі, забезпечує можливість ефективного керупілот-сигналів. Пілот-сигнали в його наборі кандивання наборами в системі з множиною несучих. датів можуть мати різні ІД груп; і жоден з пілотМожуть бути інші варіанти здійснення для керусигналів в його наборі кандидатів не може мати вання наборами. той же самий ІД групи, що і у якого-небудь з пілотНа Фіг.5 показаний варіант здійснення признасигналу в його активному наборі або будь-якому чення каналів трафіку в системі зв'язку з множиіншому з його інших наборів. Це може також ознаною несучих. Наприклад, множина каналів прямої чати, що у випадку, коли термінал AT приймає лінії зв'язку (FL), включаючи FL-канал 510 на FL пілот-сигнал з рівнем вище порога «додати пілотчастоті а, FL-канал 520 на FL частоті b, FL-канал сигнал» і з тим же ІД групи, що і існуючий пілот530 на FL частоті_с, FL-канал 540 на FL частоті d, сигнал в його наборі кандидатів, він не може додаповинні передаватися від мережі AN до термінала вати цей пілот-сигнал до свого набору кандидатів. AT (обидва не показані в явному вигляді). Канали Даний опис, що стосується набору кандидатів, зворотної лінії зв'язку (RL), включаючи RL-канал також застосовний до набору сусідів, пов'язаного з 550 на RL частоті u, RL-канал 560 на RL частоті ν і терміналом AT, як додатково описано нижче. RL-канал 570 на RL частоті w, призначені термінаУ одному варіанті здійснення термінал AT молу AT. У одному варіанті здійснення мережа AN же керувати своїм набором кандидатів таким чиможе призначати множину каналів прямої лінії ном. Термінал AT може підтримувати набір кандизв'язку, кожний з яких призначений для перенедатів таким чином, що пілот-сигнали в наборі сення зворотного потоку бітів керування потужніскандидатів всі мають різні ІД групи (іншими словатю (RPC) для кожного з каналів зворотної лінії ми, кожна група пілот-сигналів має тільки один зв'язку, призначених терміналу AT. Наприклад, FLпілот-сигнал). Термінал AT може додати пілотканал 520 може бути призначений для перенесенсигнал до набору кандидатів в наступних випадня потоку бітів RPC для RL-каналу 550, FL-канал ках: а) якщо рівень пілот-сигналу перевищує поріг 530 може бути призначений для перенесення по«додати пілот-сигнал», і пілот-сигнал не має той току бітів RPC для RL-каналу 560, FL-канал 540 же самий ІД групи, що і у якого-небудь з існуючих може бути призначений для перенесення потоку пілот-сигналів в активному наборі або в наборі бітів RPC для RL-каналу 570, як показано на Фіг.5. кандидатів; термінал AT може додати будь-який Зазначимо, що в цьому призначенні кожна пара пілот-сигнал з тим же ІД групи (що у пілот-сигналу, каналів FL і RL не обов'язково повинна мати одну і у якого рівень перевищує поріг «додати пілотту ж частоту. сигнал») до набору кандидатів; b) якщо пілотУ варіанті здійснення, представленому на сигнал видалений з активного набору, і активний Фіг.5, мережа AN також може вибрати один з FLнабір не має ніякого пілот-сигналу з тим же ІД груканалів, наприклад, FL-канал 520, як «основний пи (що і у видаленого пілот-сигналу), і час устанопілот-сигнал» і інформувати термінал AT про невлення таймера видалення пілот-сигналу не закінобхідність контролювати канал керування, що печився, термінал AT може додати будь-який пілотреноситься основним пілот-сигналом (наприклад, сигнал з тим же ІД групи (що і у видаленого пілотдля диспетчеризації і інших цілей). Таким чином сигналу) до набору кандидатів. термінал AT може ігнорувати інші канали прямої У одному варіанті здійснення термінал AT молінії зв'язку, що стосується контролю каналів керуже керувати своїм набором сусідів таким чином. вання. Термінал AT підтримує набір сусідів таким чином, Варіанти здійснення, представлені в даному що пілот-сигнали в наборі сусідів всі мають різні ІД описі (як описано з посиланнями на Фіг.2-5), загруп (іншими словами, кожна група пілот-сигналів безпечують ряд варіантів здійснення групування має тільки один пілот-сигнал). Термінал AT може пілот-сигналів, керування наборами і призначення додати пілот-сигнал до набору сусідів або видаликаналів трафіку в системі зв'язку з множиною нети в наступних випадках: а) якщо пілот-сигнал, сучих. Є і інші варіанти здійснення і їх практичні який мас ІД групи, додасться до активного набору реалізації. або набору кандидатів, то будь-який пілот-сигнал з Фіг.6 показує блок-схему процесу 600, який тим же самим ІД групи, що і у доданого пілотможе бути використаний в одному варіанті здійссигналу в наборі сусідів, може бути видалений; b) нення для реалізації групування пілот-сигналів і якщо пілот-сигнал, який має ІД групи, видалений з передачі повідомлень в системі зв'язку з множиактивного набору, але не доданий до набору канною несучих. На етапі 610 приймається множина дидатів, і активний набір не має ніякого пілотпілот-сигналів, пов'язаних з сектором, причому сигналу з тим же ІД групи, що і у видаленого пілоткожний пілот-сигнал має ідентифікатор групи. На сигналу, термінал AT може додати будь-який піетапі 620 пілот-сигнали групуються в одну або лот-сигнал з тим же ІД групи (що і у видаленого більше груп відповідно до ідентифікаторів груп пілот-сигналу) до набору сусідів; с) якщо пілотпілот-сигналів. На етапі 630 вибирається репрезесигнал, який має ІД групи, видалений з набору нтативний пілот-сигнал з кожної групи пілоткандидатів, але не доданий до активного набору, і сигналів для передачі повідомлення про рівень активний набір не має ніякого пілот-сигналу з тим пілот-сигналу (як описано вище). У одному варіанті же самим ІД групи, що і у видаленого пілотздійснення PN-зсув може бути використаний як сигналу, то термінал AT може додати будь-який ідентифікатор групи. 13 92003 14 Нa Фіг.7 показана блок-схема процесу 700, На Фіг.10 показана блок-схема пристрою 1000, який може бути використаний в одному варіанті який може використовуватися для реалізації дездійснення для реалізації керування наборами в яких розкритих варіантів здійснення (як описано системі зв'язку з множиною несучих. На етапі 710 вище). Наприклад, пристрій 1000 може включати в вимірюється рівень пілот-сигналу, який має ІД грусебе приймальний блок (або модуль) 1010, викопи. На етапі 720 визначається, чи перевищує рінаний з можливістю прийому множини пілотвень пілот-сигналу поріг «додати пілот-сигнал», і сигналів, пов'язаних з сектором, причому кожний чи не має активний набір або набір кандидатів пілот-сигнал має ІД групи; блок 1020 групування, пілот-сигнал з тим же самим ІД групи (що і у пілотвиконаний з можливістю групування пілот-сигналів сигналу, рівень якого перевищує поріг «додати в одну або більше груп пілот-сигналів відповідно пілот-сигнал»). Якщо результат визначення на до ІД групи пілот-сигналів; і блок 1030 вибору, виетапі 720 є позитивним («так»), то далі іде етап конаний з можливістю вибору репрезентативного 730, на якому пілот-сигнал з тим же ІД групи (що і пілот-сигналу з кожної групи пілот-сигналів для у пілот-сигналу, рівень якого перевищує поріг «допередачі повідомлення про рівень пілот-сигналу. дати пілот-сигнал») додається до набору кандидаПристрій 1000 може також включати в себе блок тів. Якщо результат визначення на етапі 720 є не1050 вимірювання, виконаний з можливістю вимігативним («ні»), то до набору кандидатів не рювання рівнів пілот-сигналів (наприклад, рівня додається ніякий пілот-сигнал з тим же ІД групи пілот-сигналу, такого як репрезентативний пілот(що і у пілот-сигналу, рівень якого перевищує поріг сигнал, асоційований з кожною групою пілот«додати пілот-сигнал»), як показано на етапі 740. сигналів), і блок 1040 повідомлення, виконаний з У випадку, коли пілот-сигнал, який має ІД групи, можливістю повідомлення про рівень репрезентавидаляється з активного набору, як показано на тивного пілот-сигналу для групи пілот-сигналів в етапі 750, на етапі 760 визначається, чи не має мережі доступу (наприклад, про рівні пілотактивний набір якого-небудь пілот-сигналу з тим сигналів в групі пілот-сигналів, які перевищують же ІД групи (що і у видаленого пілот-сигналу), і чи поріг «додати пілот-сигнал», або спадають нижче не закінчився час установлення таймера видаленпорога «виключити пілот-сигнал», як описано виня пілот-сигналу. Якщо результат визначення на ще). Пристрій 1000 може також включати в себе етапі 760 позитивний («так»), то виконується етап блок 1060 керування наборами, виконаний з мож730, як описано вище. Якщо результат визначення ливістю визначення того, чи належить прийнятий на етапі 760 негативний («ні»), то виконується етап пілот-сигнал до одного з набору кандидатів або 740, як описано вище. набору сусідів, асоційованого з терміналом AT (як Фіг.8 показує блок-схему процесу 800, який описано вище). може використовуватися в іншому варіанті здійсПристрій 1000, приймальний блок 1010, блок нення для реалізації керування наборами в систе1020 групування, блок 1030 вибору, блок 1050 мі зв'язку з множиною несучих. Якщо пілот-сигнал вимірювання, блок 1040 повідомлення і блок 1060 з ІД групи видаляється з активного набору, але не керування наборами можуть бути зв'язані з комунідодається в набір кандидатів, як показано на Фіг. каційною шиною 1090. Блок 1070 обробки і блок 810, або пілот-сигнал, який має ІД групи, видаля1080 пам'яті можуть бути також зв'язані з комуніється з набору кандидатів, але не додається в каційною шиною 1090. Блок 1070 обробки може активний набір, як показано па Фіг. 820, то на етапі бути виконаний з можливістю керування і/або ко830 визначається, чи має активний набір якийординації операцій різних блоків. Блок 1080 пам'яті небудь пілот-сигнал з тим же самим ІД групи (як у може реалізовувати інструкції для виконання бловидаленого пілот-сигналу). Якщо результат визнаком 1070 обробки. У деяких варіантах здійснення чення на етапі 830 негативний («ні»), то на етапі блок 1080 пам'яті може також зберігати активний 840 пілот-сигнал з тим же самим ІД групи (як у винабір, набір кандидатів і набір сусідів для термінадаленого пілот-сигналу) додасться до набору сусіла АΤ (як описано вище). дів. Якщо результат визначення на етапі 830 позиФіг.11 показує блок-схему пристрою 1100, який тивний («так»), то ніякий пілот-сигнал з тим же може бути використаний для реалізації деяких самим ІД групи (як у видаленого пілот-сигналу) не розкритих варіантів здійснення (як описано вище). додасться до набору сусідів, як показано на етапі Наприклад, пристрій 1100 може включати в себе 850. блок 1100 надання ІД групи, виконаний з можливіУ випадку, коли пілот-сигнал з ІД групи додастю надання ІД групи кожному з пілот-сигналів, ється до активного набору або до набору кандидаасоційованих з сектором, на основі області поктів, як показано на етапі 860, на етапі 870 видаляриття кожного пілот-сигналу; і передавальний блок ються всі пілот-сигнали з тим же самим ІД групи 1120, виконаний з можливістю передачі пілот(що і у доданого пілот-сигналу) з набору кандидасигналів з різними ІД груп. Пристрій 1100 може тів і набору сусідів. також включати в себе блок 1130 призначення На Фіг.9 показана блок-схема процесу, який каналів трафіку, конфігурований для призначення може бути використаний в іншому варіанті здійсодного або більше каналів прямої лінії зв'язку для нення для реалізації групування пілот-сигналів в перенесення інформації (наприклад, каналу керусистемі зв'язку з множиною несучих. На етапі 910 вання, потоку бітів RPC і т. д.) для термінала AT надається ІД групи кожному пілоту-сигналу, асоці(наприклад, такого, як описаний з посиланням на йованому з сектором, на основі зони покриття коФіг.5). жного пілот-сигналу. На етапі 920 кожний пілотУ пристрої 1100 блок 1100 надання ІД групи, сигнал передасться з відповідним ІД групи. передавальний блок 1120 і блок 1130 призначення каналів трафіку можуть бути зв'язані з комуніка 15 92003 16 ційною шиною 1140. Блок 1150 обробки і блок такі, що обумовлюють відхилення від об'єму дано1160 пам'яті можуть також бути зв'язані з комуніго винаходу. каційною шиною 1140. Блок 1150 обробки може Різні ілюстративні логічні блоки, модулі і схебути конфігурований для керування і/або коордими, описані в зв'язку з розкритими варіантами нації операцій різних блоків. Блок 1160 пам'яті моздійснення, можуть бути реалізовані або виконані же реалізовувати інструкції для виконання блоком з використанням універсального процесора, циф1150 обробки. рового процесора сигналів (DSP). спеціалізованої Різні блоки/модуль, показані на Фіг.10-11 і в інтегральної схеми (ASIC), програмованої вентиінших варіантах здійснення винаходу, можуть бути льної матриці (FPGA) або іншого програмованого реалізовані апаратними засобами, програмним логічного пристрою, дискретної логічної схеми або забезпеченням, програмно-апаратним забезпетранзисторної логіки, дискретних компонентів апаченням або комбінацією вказаних засобів. При ратних засобів або яких-небудь їх комбінацій. Уніреалізації апаратними засобами різні блоки моверсальний процесор може бути мікропроцесором, жуть бути реалізовані на одній або більше спеціаале в альтернативному варіанті процесор може лізованих інтегральних схемах (ASIC), цифрових являти собою звичайний процесор, контролер, процесорах сигналів (DSP), цифрових пристроях мікроконтролер або кінцевий автомат. Процесор обробки сигналів (DSPD), програмованих вентильможе бути також реалізований як комбінація обчиних матрицях (FPGA), процесорах, мікропроцесослювальних пристроїв, наприклад як комбінація рах, контролерах, мікроконтролерах, програмоваDSP і мікропроцесора, множина мікропроцесорів, них логічних пристроях (PLD), інших електронних один або більше мікропроцесорів у взаємозв'язку з блоках або яких-небудь їх комбінаціях. При реаліядром DSP або будь-яка подібна конфігурація. зації на основі програмного забезпечення різні Етапи способу або алгоритму, описані в зв'язблоки можуть бути реалізовані з використанням ку з розкритими варіантами здійснення, можуть модулів (наприклад, процедур, функцій і т. д.), які бути реалізовані безпосередньо в апаратних засовиконують описані функції. Коди програмного забах, в модулі програмного забезпечення, що викобезпечення можуть бути збережені в блоці пам'яті нується процесором, або в комбінації обох цих і можуть виконуватися процесором (або блоком засобів. Модуль програмного забезпечення може обробки). Блок пам'яті може бути реалізований в знаходитися в оперативному запам'ятовуючому процесорі або зовнішнім чином по відношенню до пристрої (ОЗП), флеш-пам'яті, постійному запам'япроцесора, і в цьому випадку він може бути комутовуючому пристрої (ПЗП), електронно програмонікативно зв'язаний з процесором за допомогою ваному пзп (ЕППЗП), електронно стираному прорізних засобів, як відомо в техніці. грамованому ПЗП (ЕСППЗП), регістрах, на Різні розкриті варіанти здійснення можуть бути жорсткому диску, знімному диску. ПЗП на компактреалізовані в мережі AN, в терміналі AT і в інших диску (CD-ROM) або будь-якому іншому носії для елементах в системах зв'язку з множиною несузберігання даних, відомому в техніці. Наведений чих. для прикладу носій запису зв'язаний з процесоФахівцям в даній галузі техніки повинно бути ром, так ідо процесор може зчитувати інформацію зрозуміло, що інформація і сигнали можуть бути з носія запису і записувати інформацію на носій представлені з використанням будь-яких з множизапису. У альтернативному варіанті, носій запису ни різних технологій і методів. Наприклад, дані, може знаходитися на ASIC. ASIC може знаходитиінструкції, команди, інформація, сигнали, біти, сися в терміналі. У альтернативному варіанті процемволи і кодові елементи, які можуть згадуватися у сор і носій запису можуть знаходитися на дискретвищенаведеному описі, можуть бути представлені них компонентах в терміналі. напругами, струмами, електромагнітними хвилями, Попередній опис розкритих варіантів здійсненмагнітними полями або частинками, оптичними ня призначений для того, щоб забезпечити можполями або частинками або будь-якою комбінаціливість фахівцям в даній галузі техніки реалізуваєю вказаних засобів. ти або використати даний винахід. Різні Фахівцям в даній галузі техніки повинно бути модифікації цих варіантів здійснення винаходу зрозуміло, що різні ілюстративні логічні блоки, мобудуть очевидні для фахівців в даній галузі технідулі, схеми і етапи алгоритмів, описані в зв'язку з ки, і загальні розкриті принципи можуть бути зарозкритими варіантами здійснення, можуть бути стосовані до інших варіантів здійснення без відхиреалізовані електронними апаратними засобами, лення від суті або об'єму винаходу. Таким чином, комп'ютерним програмним забезпеченням або даний винахід не призначається для обмеження комбінацією вказаних засобів. Для ясної ілюстрації розкритими варіантами здійснення, а повинен відцієї взаємозамінності апаратних засобів і програмповідати самому широкому об'єму, сумісному з ного забезпечення різні ілюстративні компоненти, розкритими принципами і новими ознаками. блоки, модулі, схеми і етапи описані вище в терміПерелік посилальних позицій нах їх функціональних можливостей. Те, чи реалі140 PDSN зовані такі функціональні можливості як апаратні 120 AN засоби або програмне забезпечення, залежить від 110a,b,c, 360 AT конкретного застосування і обмежень при проекту240,340 Частота ванні, що накладаються на систему загалом. Фахі310,320,330 Сектор вець в даній галузі техніки може реалізувати необ350 Додати пілот-сигнал хідну функціональність різними шляхами для 355 Видалити пілот-сигнал кожного конкретного застосування, але такі рішення по реалізації не повинні інтерпретуватися як 17 92003 18 610 Прийом множини пілот-сигналів, асоційо830 Активний набір має пілот-сигнал з тим же ваних з сектором, причому кожний пілот-сигнал самим ІД групи? має ідентифікатор групи 840 Додати пілот-сигнал з тим же самим ІД 620 Групування пілот-сигналів в одну або бігрупи до набору кандидатів льше груп пілот-сигналів відповідно до ідентифіка850 Не додавати пілот-сигнал з тим же самим торів груп пілот-сигналів ІД групи до набору кандидатів 630 Вибір репрезентативного пілот-сигналу з 860 Пілот-сигнал, який має ІД групи, доданий кожної групи пілот-сигналів для повідомлення про до активного набору або до набору кандидатів рівень пілот сигналу 870 Видалити всі пілот-сигнали з тим же са710 Вимірювання рівня пілот-сигналу, який мим ІД групи з набору кандидатів і набору сусідів має ІД групи 910 Надання ідентифікатора групи кожному з 720 Рівень > порога "додати пілот-сигнал" і акпілот-сигналів, асоційованих з сектором, на основі тивний набір або набір кандидатів не має пілотзони покриття кожного пілот-сигналу сигналу з тим же самим ІД групи? 920 Передача кожного пілот-сигналу з іденти730 Додати пілот-сигнал з тим же самим ІД фікатором групи групи до набору кандидатів 1010 Приймальний блок 740 Не додавати пілот-сигнал з тим же самим 1020 Блок групування ІД групи до набору кандидатів 1030 Блок вибору 750 Видалити пілот-сигнал, який має ІД групи, 1040 Блок повідомлення з активного набору 1050 Блок вимірювання 760 Активний набір не має пілот-сигналу з тим 1060 Блок керування наборами же самим ІД групи, і час установлення таймера 1070 Блок обробки видалення пілот-сигналу не закінчився? 1080 Блок пам'яті 810 Пілот-сигнал, який має ІД групи, видале1110 Блок надання ІД груп ний з активного набору, але не доданий до набору 1120 Передавальний блок кандидатів 1130 Блок призначення каналів трафіку 820 Пілот-сигнал, який має ІД групи, видале1150 Блок обробки ний з набору кандидатів, але не доданий до акти1160 Блок пам'яті вного набору 19 92003 20 21 92003 22 23 92003 24 25 92003 26 27 Комп’ютерна верстка Л. Литвиненко 92003 Підписне 28 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюGrouping pilot-signals and set management in multicarrier communication systems
Автори англійськоюRezajifar Ramin, Agashe Parag Arun
Назва патенту російськоюГруппирование пилот-сигналов и управление наборами в системах связи с множеством несущих
Автори російськоюРезайифар Рамин, Агаше Параг Арун
МПК / Мітки
МПК: H04W 28/16
Мітки: множиною, групування, пілот-сигналів, керування, наборами, несучих, зв'язку, системах
Код посилання
<a href="https://ua.patents.su/14-92003-grupuvannya-pilot-signaliv-i-keruvannya-naborami-v-sistemakh-zvyazku-z-mnozhinoyu-nesuchikh.html" target="_blank" rel="follow" title="База патентів України">Групування пілот-сигналів і керування наборами в системах зв’язку з множиною несучих</a>
Передача символів пілот-сигналів в системах безпровідного зв’язку
Номер патенту: 91881
Опубліковано: 10.09.2010
Автори: Агравал Авніш, Кхандекар Аамод, Горе Дхананджай Ашок
МПК: H04J 11/00, H04W 4/20, H04B 7/06
Мітки: символів, системах, безпровідного, пілот-сигналів, зв'язку, передача
Формула / Реферат:
1. Пристрій безпровідного зв'язку, який містить:пам'ять, виконану з можливістю зберігання щонайменше однієї першої послідовності з групи перших послідовностей, що мають низьку взаємну кореляцію одна з одною, першої довжини і щонайменше двох других послідовностей з групи других послідовностей, що мають низьку взаємну кореляцію одна з одною, другої довжини, яка відрізняється від першої довжини; ісхему, пов'язану з пам'яттю,...
Схема передачі пілот-сигналів для систем радіозв’язку з передачею на декілька несучих
Номер патенту: 90244
Опубліковано: 26.04.2010
Автори: Уолтон Джей Родні, Смі Джон Е., Малладі Дурга Прасад
МПК: H04L 27/26
Мітки: передачі, пілот-сигналів, декілька, схема, передачею, систем, радіозв'язку, несучих
Формула / Реферат:
1. Спосіб обробки пілот-сигналів, прийнятих по низхідній лінії зв'язку в системі радіозв'язку з передачею на декількох несучих, який полягає в тому, щоприймають перший пілот-сигнал в першому наборі піддіапазонів з першого передавального об'єкта, при цьому перший набір піддіапазонів використовують для передачі пілот-сигналів першим передавальним об'єктом і він не перекривається з другим набором піддіапазонів, що використовується для...
Пілот-сигнали для комунікаційної системи з множиною входів і множиною виходів (мімо)
Номер патенту: 83472
Опубліковано: 25.07.2008
Автори: Уолтон Джей Р., Говард Стівен Дж., Кетчум Джон У., Уоллейс Марк
МПК: H04L 25/02, H04L 1/02
Мітки: мімо, виходів, пілот-сигнали, системі, входів, множиною, комунікаційної
Формула / Реферат:
1. Спосіб генерації пілот-сигналу у безпровідній комунікаційній системі з множиною входів і множиною виходів (МІМО), що містить етапи, на яких:одержують пілотний символ для кожної антени з множини антен;одержують ортогональну послідовність для кожної антени з множини антен, причому множині антен призначають різні ортогональні послідовності; івиконують покривання пілотного символу длякожної антени ортогональною...
Спосіб і пристрій для обробки даних для передачі та блок передавача в кодованих системах з множиною входів та множиною виходів з вибірковою інверсією каналів, що застосовується на кожній власній моді
Номер патенту: 84684
Опубліковано: 25.11.2008
Автори: Уолтон Джей Род, Кетчум Джон У., Мєдвєдєв Іріна
МПК: H04B 7/005, H04L 1/02
Мітки: передавача, блок, моди, каналів, передачі, інверсією, вибірковою, кодованих, власній, спосіб, входів, кожній, множиною, даних, виходів, пристрій, обробки, системах, застосовується
Формула / Реферат:
1. Спосіб обробки даних для передачі у системі зв'язку з множиною входів, множиною виходів (МІМО), що включає етапи, на якихорганізовують множину наявних каналів передачі у множину груп; і для кожної групи каналів передачі, яка повинна використовуватися для передачі даних:вибирають один або більше каналів передачі у групі для використання і визначають масштабний коефіцієнт для кожного вибраного каналу передачі...
Система модуляції з множиною несучих з рознесенням циклічних затримок
Номер патенту: 91509
Опубліковано: 10.08.2010
Автори: Малладі Дурга П., Мантраваді Ашок, Муралі Рамасвамі, Агравал Авніш, Стамоуліс Анастасіос
МПК: H04L 27/26
Мітки: циклічних, модуляції, система, несучих, множиною, рознесенням, затримок
Формула / Реферат:
1. Пристрій для передачі даних в системі зв'язку, який містить:перший модулятор для генерування символів модуляції з множиною несучих (МСМ), які мають множину тривалостей циклічних затримок, причому МСМ є першим методом радіозв'язку;передавач для передачі МСМ-символів від єдиної антени;другий модулятор для генерування сигналу згідно з другим методом радіозв'язку; імультиплексор для мультиплексування МСМ-символів у...
Попередній патент: Спосіб риформінгу для одержання синтез-газу та установка для його здійснення
Наступний патент: Структура декодера для оптимізованого керування обробкою помилок в потоковій передачі мультимедійних даних
Випадковий патент: Фільтрувальний елемент протипилового респіратора