Передача символів пілот-сигналів в системах безпровідного зв’язку
Номер патенту: 91881
Опубліковано: 10.09.2010
Автори: Кхандекар Аамод, Агравал Авніш, Горе Дхананджай Ашок

Формула / Реферат
1. Пристрій безпровідного зв'язку, який містить:
пам'ять, виконану з можливістю зберігання щонайменше однієї першої послідовності з групи перших послідовностей, що мають низьку взаємну кореляцію одна з одною, першої довжини і щонайменше двох других послідовностей з групи других послідовностей, що мають низьку взаємну кореляцію одна з одною, другої довжини, яка відрізняється від першої довжини; і
схему, пов'язану з пам'яттю, причому схема виконана з можливістю множення символів пілот-сигналів, що підлягають передачі від кожної з множини антенних груп, з використанням щонайменше однієї першої послідовності і щонайменше двох других послідовностей.
2. Пристрій безпровідного зв'язку за п. 1, в якому пам'ять додатково виконана з можливістю зберігання послідовності скремблювання і в якому процесор додатково виконаний з можливістю множення символів пілот-сигналів на код скремблювання.
3. Пристрій безпровідного зв'язку за п. 2, в якому послідовність скремблювання містить єдину послідовність скремблювання.
4. Пристрій безпровідного зв'язку за п. 1, в якому схема містить процесор.
5. Пристрій безпровідного зв'язку за п. 1, в якому схема виконана з можливістю модулювання кожного символу пілот-сигналу несучою частотою згідно із заданою схемою.
6. Пристрій безпровідного зв'язку за п. 5, в якому задана схема є однією і тією ж для кожної антенної групи.
7. Пристрій безпровідного зв'язку за п. 6, в якому схема виконана з можливістю зміни заданого шаблона з плином часу.
8. Пристрій безпровідного зв'язку за п. 1, в якому кожна антенна група відповідає різному сектору базової станції.
9. Пристрій безпровідного зв'язку за п. 1, в якому перша послідовність є кодом Уолша.
10. Пристрій безпровідного зв'язку за п. 1, в якому група перших послідовностей являє собою ортогональні коди.
11. Пристрій безпровідного зв'язку за п. 1, в якому група других послідовностей являє собою PN-послідовності.
12. Пристрій безпровідного зв'язку за п. 1, в якому група других послідовностей являє собою експонентні коди.
13. Спосіб передачі символів пілот-сигналу, що містить етапи, на яких
множать перші символи пілот-сигналу для першої антенної групи з використанням першої послідовності з групи перших послідовностей, що мають низьку взаємну кореляцію одна з одною, і щонайменше двох других послідовностей з групи других послідовностей, що мають низьку взаємну кореляцію одна з одною;
множать другі символи пілот-сигналу для другої антенної групи з використанням третьої послідовності з групи перших послідовностей і щонайменше двох четвертих послідовностей з групи других послідовностей;
передають перший символ пілот-сигналу за допомогою першої антенної групи; і
передають другий символ пілот-сигналу за допомогою другої антенної групи.
14. Спосіб за п. 13, який додатково містить етапи, на яких
множать перші символи пілот-сигналу і другі символи пілот-сигналу на послідовність скремблювання;
множать треті символи пілот-сигналу для третьої антенної групи з використанням однієї послідовності з першої групи послідовностей і щонайменше двох других послідовностей з групи других послідовностей;
передають третій символ пілот-сигналу за допомогою третьої антенної групи.
15. Спосіб за п. 13, який додатково містить етап, на якому модулюють кожний символ пілот-сигналу несучою частотою згідно із заданою схемою.
16. Спосіб за п. 15, в якому задана схема є однією і тією ж для кожної антенної групи.
17. Спосіб за п. 16, що додатково містить етап, на якому змінюють задану схему з плином часу.
18. Спосіб за п. 13, в якому кожна антенна група відповідає різному сектору базової станції.
19. Спосіб за п. 13, в якому перша і третя ортогональні послідовності є кодами Уолша.
20. Спосіб за п. 13, в якому група перших послідовностей являє собою ортогональні коди.
21. Спосіб за п. 13, в якому група других послідовностей являє собою PN-послідовності.
22. Спосіб за п. 13, в якому група других послідовностей являє собою експонентні коди.
23. Пристрій безпровідного зв'язку, який містить:
засіб множення перших символів пілот-сигналу для першої антенної групи з використанням першої послідовності з групи перших послідовностей, що мають низьку взаємну кореляцію одна з одною, і щонайменше двох других послідовностей з групи других послідовностей, що мають низьку взаємну кореляцію одна з одною;
засіб множення других символів пілот-сигналу для другої антенної групи з використанням третьої послідовності з групи перших послідовностей і щонайменше двох четвертих послідовностей з групи других послідовностей;
перший передавач, виконаний з можливістю передачі перших символів пілот-сигналу від першої антенної групи; і
другий передавач, виконаний з можливістю передачі других символів пілот-сигналу від другої антенної групи.
24. Пристрій за п. 23, який додатково містить засіб модуляції кожного символу пілот-сигналу несучою частотою згідно із заданою схемою.
25. Пристрій за п. 23, який додатково містить засіб зміни заданої схеми з плином часу.
26. Пристрій за п. 23, в якому кожна антенна група відповідає різному сектору базової станції.
27. Пристрій за п. 23, в якому перша і друга послідовності є кодами Уолша.
28. Пристрій за п. 23, в якому група перших послідовностей являє собою ортогональні коди.
29. Пристрій за п. 23, в якому група других послідовностей являє собою PN-послідовності.
30. Пристрій за п. 23, в якому група других послідовностей являє собою експонентні коди.
31. Зчитуваний процесором носій інформації, що містить команди, які можуть бути використані одним або декількома процесорами, причому команди містять:
команди для множення перших символів пілот-сигналу для першої антенної групи з використанням першої послідовності з групи перших послідовностей, що мають низьку взаємну кореляцію одна з одною, і щонайменше двох других послідовностей з групи других послідовностей, що мають низьку кореляцію одна з одною;
команди для множення других символів пілот-сигналу для другої антенної групи з використанням послідовності з групи перших послідовностей і щонайменше двох четвертих послідовностей з групи других послідовностей;
команди для передачі перших символів пілот-сигналу від першої антенної групи; і
команди для передачі других символів пілот-сигналу від другої антенної групи.
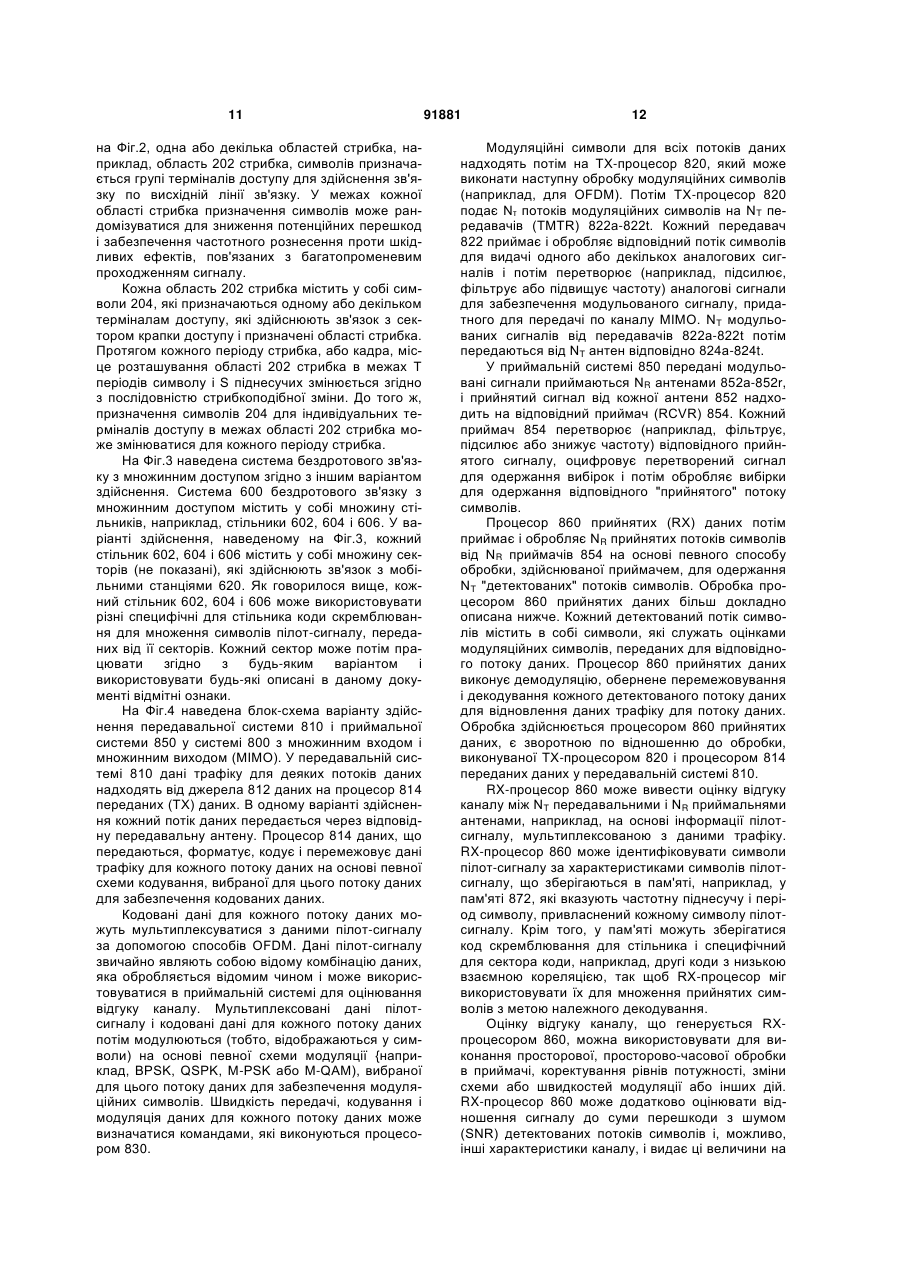
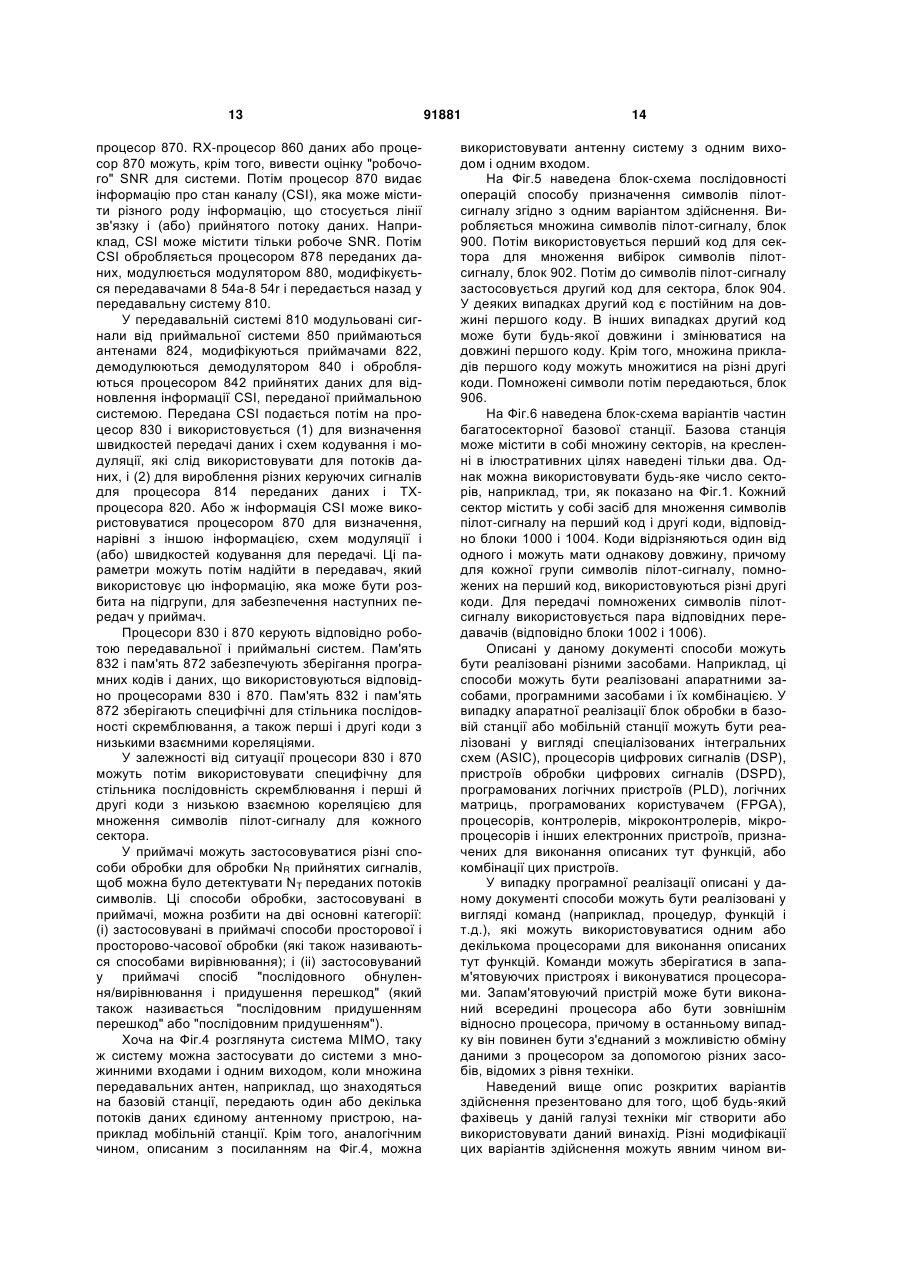
Текст
1. Пристрій безпровідного зв'язку, який містить: пам'ять, виконану з можливістю зберігання щонайменше однієї першої послідовності з групи перших послідовностей, що мають низьку взаємну кореляцію одна з одною, першої довжини і щонайменше двох других послідовностей з групи других послідовностей, що мають низьку взаємну кореляцію одна з одною, другої довжини, яка відрізняється від першої довжини; і схему, пов'язану з пам'яттю, причому схема виконана з можливістю множення символів пілотсигналів, що підлягають передачі від кожної з множини антенних груп, з використанням щонайменше однієї першої послідовності і щонайменше двох других послідовностей. 2. Пристрій безпровідного зв'язку за п. 1, в якому пам'ять додатково виконана з можливістю зберігання послідовності скремблювання і в якому процесор додатково виконаний з можливістю множення символів пілот-сигналів на код скремблювання. 3. Пристрій безпровідного зв'язку за п. 2, в якому послідовність скремблювання містить єдину послідовність скремблювання. 4. Пристрій безпровідного зв'язку за п. 1, в якому схема містить процесор. 5. Пристрій безпровідного зв'язку за п. 1, в якому схема виконана з можливістю модулювання кожного символу пілот-сигналу несучою частотою згідно із заданою схемою. 2 (19) 1 3 91881 4 двох других послідовностей з групи других послідовностей; передають третій символ пілот-сигналу за допомогою третьої антенної групи. 15. Спосіб за п. 13, який додатково містить етап, на якому модулюють кожний символ пілот-сигналу несучою частотою згідно із заданою схемою. 16. Спосіб за п. 15, в якому задана схема є однією і тією ж для кожної антенної групи. 17. Спосіб за п. 16, що додатково містить етап, на якому змінюють задану схему з плином часу. 18. Спосіб за п. 13, в якому кожна антенна група відповідає різному сектору базової станції. 19. Спосіб за п. 13, в якому перша і третя ортогональні послідовності є кодами Уолша. 20. Спосіб за п. 13, в якому група перших послідовностей являє собою ортогональні коди. 21. Спосіб за п. 13, в якому група других послідовностей являє собою PN-послідовності. 22. Спосіб за п. 13, в якому група других послідовностей являє собою експонентні коди. 23. Пристрій безпровідного зв'язку, який містить: засіб множення перших символів пілот-сигналу для першої антенної групи з використанням першої послідовності з групи перших послідовностей, що мають низьку взаємну кореляцію одна з одною, і щонайменше двох других послідовностей з групи других послідовностей, що мають низьку взаємну кореляцію одна з одною; засіб множення других символів пілот-сигналу для другої антенної групи з використанням третьої послідовності з групи перших послідовностей і щонайменше двох четвертих послідовностей з групи других послідовностей; перший передавач, виконаний з можливістю передачі перших символів пілот-сигналу від першої антенної групи; і другий передавач, виконаний з можливістю передачі других символів пілот-сигналу від другої антенної групи. 24. Пристрій за п. 23, який додатково містить засіб модуляції кожного символу пілот-сигналу несучою частотою згідно із заданою схемою. 25. Пристрій за п. 23, який додатково містить засіб зміни заданої схеми з плином часу. 26. Пристрій за п. 23, в якому кожна антенна група відповідає різному сектору базової станції. 27. Пристрій за п. 23, в якому перша і друга послідовності є кодами Уолша. 28. Пристрій за п. 23, в якому група перших послідовностей являє собою ортогональні коди. 29. Пристрій за п. 23, в якому група других послідовностей являє собою PN-послідовності. 30. Пристрій за п. 23, в якому група других послідовностей являє собою експонентні коди. 31. Зчитуваний процесором носій інформації, що містить команди, які можуть бути використані одним або декількома процесорами, причому команди містять: команди для множення перших символів пілотсигналу для першої антенної групи з використанням першої послідовності з групи перших послідовностей, що мають низьку взаємну кореляцію одна з одною, і щонайменше двох других послідовностей з групи других послідовностей, що мають низьку кореляцію одна з одною; команди для множення других символів пілотсигналу для другої антенної групи з використанням послідовності з групи перших послідовностей і щонайменше двох четвертих послідовностей з групи других послідовностей; команди для передачі перших символів пілотсигналу від першої антенної групи; і команди для передачі других символів пілотсигналу від другої антенної групи. Даний документ стосується в цілому до бездротового зв'язку і, зокрема, передачі пілот-сигналу в бездротовому зв'язку. Для передачі символів або іншої інформації система бездротового зв'язку може використовувати множину передавальних антен на базовій станції або користувацькій станції. Використовування множини передавальних антен покращує здатність приймача декодувати символи, при декодуванні передачі в розпорядженні є множина варіантів одного і того ж символу. Система множинного доступу з ортогональним частотним розділенням (OFDMA) використовує мультиплексування з ортогональним частотним розділенням (OFDM). В OFDM використовується спосіб модуляції множини несучих, при якому весь частотний діапазон системи поділяється на множину (N) ортогональних частотних піднесучих. Ці піднесучі можна також називати тонами, елементами і частотними каналами. Кожна піднесуча зв'язана з відповідною піднесучою, яку можна модулювати даними. У кожному символьному періоді OFDM може відправити до N модуляційних символів на N сумарних піднесучих. Ці модуляційні символи перетворюються у часову область за допомогою N-точкового зворотного швидкого перетворення Фур'є (ЗШПФ, IFFT) для генерації перетвореного символу, який містить N елементарних сигналів (посилок) або вибірок у часовій області. В системі зв'язку з стрибкоподібною зміною частоти дані передаються на різних частотних піднесучих у різні часові інтервали, які можна назвати "періодами стрибка". Ці частотні піднесучі можуть бути забезпечені за допомогою мультиплексування з ортогональним розділенням частот, інших способів модуляції на множині несучих або будьякій інших конструкцій. У випадку стрибкоподібної зміни частоти передача даних перескакує від піднесучої до піднесучої псевдовипадковим чином. Це перескакування забезпечує частотне рознесення і забезпечує більшу стійкість передачі даних до шкідливих ефектів, пов'язаних з багатопроменевим проходженням сигналу, таким як вузькосму 5 гові перешкоди, взаємні перешкоди, завмирання сигналу і т.д. Система OFDMA може підтримувати одночасно декілька мобільних станцій. Для системи OFDMA з стрибкоподібною зміною частоти передача даних для даної мобільної станції може здійснюватися по каналу "трафіку", який пов'язаний з певною послідовністю стрибкоподібної зміни, частоти (FH-послідовністю). Ця FH-послідовність вказує, яка конкретна піднесуча повинна використовуватися для передачі даних у кожний період стрибка. Можна одночасно здійснювати множину передач даних для множини мобільних станцій на множині каналів трафіку, які пов'язані з різними FH-послідовностями. Ці FH-послідовності можна визначити таким чином, щоб вони були ортогональні одна одній, так щоб тільки в кожний період стрибка кожну піднесучу використовував тільки один канал трафіку і, таким чином, тільки одна передача даних. Застосування ортогональних FHпослідовностей дозволяє множині передач даних не створювати в цілому перешкоди одна одній і при цьому користуватися перевагами рознесення частот. Для відновлення даних, переданих по бездротовому каналу, звичайно потрібна точна оцінка бездротового каналу між передавачем і приймачем. Оцінка каналу звичайно виконується за допомогою відправлення пілот-сигналу від передавача і вимірювання пілот-сигналу в приймачі. Пілотсигнал складається з символів пілот-сигналу, які апріорі відомі і передавачу, і приймачу. Таким чином, приймач може оцінити відгук каналу на основі прийнятих символів і відомих символів. Множинний доступ з кодовим розділенням каналів (CDMA) має універсальне багаторазове використання частот, яке дозволяє мобільним користувачам приймати і відправляти той самий сигнал одночасно від множини базових станцій і секторів базової станції і до них. М'яка і більш м'яка передача обслуговування в системах CDMA являє собою спосіб, відповідно до якого мобільні станції, розташовані поблизу меж стільника, і сектора у випадку більш м'якої передачі обслуговування, передають ті самі сигнали більше ніж однієї базовій станції або сектору базової станції. М'яка і більш м'яка передача обслуговування забезпечує підвищену якість зв'язку і більш плавний перехід у порівнянні зі звичайною твердою передачею обслуговування. М'яка і більш м'яка передача обслуговування властива системі CDMA, оскільки передані сигнали різних користувачів займають ту саму часову і частотну область. Різних користувачів можна розділити на основі відповідних сигнатур розподілення. Підтримка м'якої і більш м'якої передачі обслуговування в ортогональних системах множинного доступу, таких як TDMA, FDMA і OFDMA, є набагато більш важкою і часто вимагає спеціального планування. Наприклад, для забезпечення рознесення на висхідній лінії зв'язку використовується специфічний для стільника код скремблювання з метою рандомізації перешкод з боку сусідніх стільників. Часто використовується різний код скремблювання для різних секторів одного стільника 91881 6 (наприклад, вузла В). У випадку застосування специфічного для сектора коду скремблювання до радіодоступу на основі OFDM на низхідній лінії зв'язку, кожний модуляційний символ каналу пілотсигналу випробовує міжсекторні перешкоди. Вплив міжсекторних перешкод на канал пілот-сигналу особливо суттєвий для користувача, який перебуває в стані передачі обслуговування. Однак через міжсекторні перешкоди оцінювання каналу з використанням каналу пілот-сигналу при міжсекторному рознесенні не поліпшується у порівнянні з випадком з'єднання по одній лінії зв'язку. Тому необхідно поліпшити оцінювання каналу, особливо для випадку передачі обслуговування між секторами. Таким чином, існує потреба в знаходженні ефективних підходів для забезпечення поліпшеного оцінювання каналу для різних секторів у системах OFDMA. У деяких аспектах бездротовий пристрій зв'язку містить пам'ять і схему, з'єднану з процесором. Пам'ять виконана з можливістю зберігання щонайменше однієї першої послідовності з групи перших послідовностей, що мають низьку взаємну кореляцію одна з одною, першої довжини і щонайменше двох інших послідовностей з групи інших послідовностей, що мають низьку кореляцію одна з одною, другої довжини, яка відрізняється від першої довжини. Схема виконана з можливістю множення символів пілот-сигналу, які підлягають передачі від множини антенних груп, з використанням щонайменше однієї першої послідовності і щонайменше двох інших послідовностей. В іншому аспекті спосіб передачі символів пілот-сигналу включає етапи, на яких множать перші символи пілот-сигналу для першої антеною групи з використанням першої послідовності з групи перших послідовностей, які мають низьку взаємну кореляцію одна з одною, і щонайменше двох других послідовностей, які мають низьку взаємну кореляцію одна з одною, і множать другі символи пілот-сигналу для другої антеної групи з використанням третьої послідовності з групи перших послідовностей і щонайменше двох четвертих послідовностей з групи других послідовностей. Перший і другий символи пілот-сигналу можуть бути передані. В інших аспектах зчитуваний процесором носій інформації може містити команди, які здійснюються одним або декількома процесорами. Команди можуть виконувати один або декілька варіантів вищенаведеного способу. У додатковому аспекті пристрій для передачі символів пілот-сигналу містить засіб для множення перших символів пілот-сигналу для першої антеної групи з використанням першої послідовності з групи перших послідовностей, які мають низьку взаємну кореляцію одна з одною, і щонайменше двох інших послідовностей з групи других послідовностей, які мають низьку взаємну кореляцію одна з одною, і засіб для множення других символів пілот-сигналу для другої антеної групи з використанням третьої послідовності з групи перших послідовностей і щонайменше двох четвертих послідовностей з групи других послідовностей. 7 Пристрій може також містити в собі один або декілька передавачів, виконаних з можливістю передачі перших і других символів пілот-сигналу. Нижче описані докладно різні аспекти і варіанти здійснення. Варіанти застосування містять у собі способи, процесори, передавальні пристрої, приймальні пристрої, базові станції, термінали, системи і інші пристрої і елементи, які реалізують різні аспекти, варіанти здійснення і відмітні ознаки, описані нижче більш докладно. Відмітні ознаки, характер і переваги даних варіантів здійснення можуть бути більш зрозумілими з наведеного нижче докладного опису, взятого разом з кресленнями, на яких подібні символи позицій вказують відповідні елементи в на яких Фіг.1 ілюструє систему бездротового зв'язку з множинним доступом згідно з одним варіантом здійснення; Фіг.2 ілюструє схему розподілу частотного спектра для системи бездротового зв'язку з множинним доступом згідно з одним варіантом здійснення; Фіг.3 ілюструє варіанти системи бездротовому зв'язку з множинним доступом; Фіг.4 ілюструє блок-схему варіантів передавальної системи і приймальної системи в системі бездротового зв'язку з множинним доступом з множиною входів і множиною виходів; Фіг.5 ілюструє блок-схему послідовності дій для варіантів способу передачі пілот-сигналу; і Фіг.6 ілюструє блок-схему варіантів частин багатосекторної базової станції. На Фіг.1 наведена система бездротового зв'язку з множинним доступом згідно з одним варіантом здійснення. Базова станція 100 містить у собі множину антенних груп 102, 104 і 106, кожна з яких містить одну або декілька антен. На Фіг.1 зображена тільки одна антена для кожної антеної групи 102, 104 і 106, однак для кожної антеної групи, яка відповідає сектору базової станції 100, можна використовувати одну або множину антен. Мобільна станція 108 здійснює зв'язок з антеною 104, при цьому антена 104 передає інформацію у мобільну станцію 108 по низхідній лінії 118 зв'язку і приймає інформацію від мобільної станції 108 по висхідній лінії зв'язку 116. Мобільна станція 110 здійснює зв'язок з антеною 106, причому антена 106 передає інформацію в мобільну станцію 110 по низхідній лінії зв'язку 122 і приймає інформацію від мобільної станції 110 по висхідній лінії зв'язку 120. Кожна група антен 102, 104 і 106 і (або) зона, в якій вони призначені забезпечувати зв'язок, часто називається сектором базової станції. У даному варіанті здійснення кожна з антенних груп 102, 104 і 106 призначена для забезпечення зв'язку в деякому секторі, відповідно у секторах 126, 122 і 124, зон, що покриваються базовою станцією 100. Щоб мати можливість ефективно обробляти символи даних, базова станція 100 може передавати символи пілот-сигналу з секторів 126, 122 і 124, які можна ідентифікувати так, щоб вони відрізнялися один від одного. У деяких варіантах це можна виконати, навіть якщо символи пілотсигналу передаються на одних і тих же піднесучих і приблизно в один і той же час з двох секторів. 91881 8 Наприклад, це можна виконати за допомогою множення символів пілот-сигналу від кожного сектора на спільний для стільника код скремблювання і перший код з низькою взаємною кореляцією, наприклад, ортогональний код, який є характерним для певного сектора. Таким чином, зменшуються перешкоди для символів пілот-сигналу, переданих від даного сектора, відносно будь-якого іншого сектора. Крім першого коду для сектора можна використовувати другий код з низькою взаємною кореляцією, наприклад, ортогональний код, квазіортогональний або псевдовипадковий код, для кожної частини коду, яка повторюється в даному символі OFDM. Крім того, другий код з низькою взаємною кореляцією вибирають таким чином, щоб символи пілот-сигналу, передані з даного сектору, кодувалися з низькою взаємною кореляцією відносно символів пілот-сигналу, переданим з іншого сектору того ж або іншого стільника. Базова станція може бути нерухомою станцією, яка використовується для зв'язку з терміналами, і може також називатися або містити в собі деякі або всі функціональні можливості точки доступу, вузла В або будь-якого іншого терміна. Мобільна станція може також називатися або містити в собі деякі або всі функціональні можливості мобільної станції, абонентського устаткування (UE), пристрою бездротового зв'язку, термінала, термінала доступу або будь-якого іншого терміна. У даному документі вираз "здійснює зв'язок з антенною групою або антеною" звичайно стосується антенної групи або антени, які відповідають за передачу у мобільну станцію. У випадку передачі від мобільної станції для прийому передачі можна використовувати множину антенних груп, у тому числі використання м'якого або інших типів комбінування. Потрібно відмітити, що хоча на Фіг.1 зображені фізичні сектори, тобто сектори, що мають різні антенні групи для різних секторів, можна використовувати і інші підходи. Наприклад, замість або в комбінації з фізичними секторами можна використовувати множину фіксованих "пучків", кожний з яких покриває різні зони стільника у частотній області. Такий підхід зображений і розкритий у патентній заявці США порядковий № [ще не привласнений], яка одночасно розглядається, № справи у повіреного 050917, яка називається "Адаптивне розбивання на сектори в системі стільникового зв'язку" і подана у той же день, що і дана заявка, і яка включена у даний документ за допомогою посилання. У такому випадку різним "пучкам" можуть бути привласнені різні послідовності скремблювання і код з низькою взаємною кореляцією, як описано у даному документі. Як розглянуто вище, перший код з низькою взаємною кореляцією використовується для множення на нього символів пілот-сигналу в кожному секторі, який ортогональний або квазіортогоналтний іншому першому коду з низькою взаємною кореляцією, який використовується для множення на нього символів пілот-сигналу в кожному секторі стільника. Крім того,після множення символів пілот-сигналу на перший код у кожному секторі ви 9 91881 користовується другий код з низькою взаємною кореляцією для множення на нього символів пілотсигналу. Цей другий код з низькою взаємною кореляцією, який може являти собою будь-яку кількість ортогональних або квазіортогональних кодів, 10 використовується для множення по всій довжині першого коду на другий код з низькою взаємною кореляцією, який використовується в окремому секторі. Це показано в таблиці 1: Таблиця 1 Сектор 1 Сектор 2 Піднесуча Перший код Другий код Піднесуча пілотпілотсигналу сигналу W1(0) Ρ1(0) 0 0 W1(2) P1(2) 2 2 W1(4) P1(4) 4 4 W1(6) P1(6) 6 6 W1(8) P2(8) 8 8 W1(10) P2(10) 10 10 W1(12) P2(12) 12 12 W1(14) P2(14) 14 14 Перший код Другий код W2(0) W2(2) W2(4) W2(6) W2(8) W2(10) W2(12) W2(14) Р3(0) Р3(2) Р3(4) Р3(6) Р4(8) Р4(10) Р4(12) Р4(14) У прикладах, наведених у таблиці 1, пілотсигнали займають частоти 0, 2, 4, 6, 8, 10, 12 і 14. У даному символі OFDM для всіх секторів даного стільника. Може застосовуватися або не застосовуватися специфічний для стільника код скремблювання. У деяких варіантах цей специфічний для стільника код скремблювання може застосовуватися у вигляді S(0), S(2), S(4), S(6), S(8), S(10), S(12) і S(14). Потім здійснюється множення на перший код W1(0), W1(2), W1(4), W1(6), W1(8), W1(10), W1(12) і W1(14) для сектора 1, на перший код W2(0), W2(2), W2(4), W2(6), W2(8), W2(10), W2(12) і W2(14) для сектора 2 і на перший код W3(0), W3(2), W3(4), W3(6), W3(8), W3(10), W3(12) і W3(14) для сектора 3. У деяких аспектах перший і (або) другий коди W1, W2 і W3 можуть бути кодами Уолша або експонентними кодами. Крім того, кожний з перших кодів звичайно має меншу довжину, ніж число частот, використовуваних для символів пілот-сигналу. Наприклад, коди W1, W2 і W3 можуть мати довжину, яка дорівнює чотирьом, так що кожний перший код повторюється двічі в кожному символі OFDM для кожного сектора. Іншими словами, перший код, використовуваний для множення символів пілот-сигналу для піднесучих 0, 2, 4 і 6 і перший код, використовуваний для множення символів пілот-сигналу для піднесучих 8, 10, 12 і 14, є ідентичними. Прийнятий сигнал на частоті і для користувача дається виразом S(i) (W1(i)PN(i)H1(i)+W2(i)PN(i)H2(i)+W3(i)PN(i)H3(i) + шум, де Η1, Н2 і Н3 - це канали відповідно від секторів 1, 2 і 3. Незважаючи на те, що W1, W2 і W3 можуть бути ортогональними або квазіортогональними відносно один одного на частотах {0,2,4,6}, будь-які два добутки W1(i)H1(i), W2(i)H2(i) і W3(i)H3(i) можуть не бути ортогональними або квазіортогональними, якщо будь-який канал Н1, Н2 або Н3 демонструє значні варіації по набору частот {0, 2, 4, 6, 8, 10 і т.д.} У деяких випадках через варіацію каналів будь-які два добутки з W1(i)H1(i), W2(i)H2(i) і W3(i)H3(i) у дійсності демонструють дуже високу кореляцію. У цьому випадку ніякого придушення Сектор 3 Піднесуча пілот - сигналу 0 2 4 6 8 10 12 14 Перший код Другий код W3(0) W3(2) W3(4) W3(6) W3(8) W3(10) W3(12) W3(14) Ρ5(0) P5(2) P5(4) P5(6) P6(8) Р6(10) Р6(12) Р6(14) перешкод від пілот-сигналів цих двох секторів не буде. Для вирішення таких ситуацій другий код PN може бути постійним по довжині першого коду. У деяких варіантах другий код приймає одне псевдовипадкове значення для частот 0, 2, 4 і 6 і інше значення для частот 8, 10, 12 i 14. Це приводить до того, що навіть у тому випадку, коли W1(i)H1(i), W2(i)H2(i) і W3(i)H3(i) від двох секторів мають високу кореляцію, ця кореляція має різну фазу для різних частотних областей завдяки використанню коду PN і є різні моменти часу. При застосуванні інтерполяції по частоті або часі різні фази усереднюються і дають низьку загальну кореляцію. Хоча другі коди можуть бути постійними по довжині першого коду, вони можуть відрізнятися для інших піднесучих, які виходять за межі довжини першого коду у тому ж секторі. Слід відмітити, що другі коди можуть бути різними у кожному секторі. Або ж другі коди можуть бути однаковими у кожному секторі, але мати різний порядок у кожному секторі у застосуванні до різних піднесучих пілот-сигналу, щоб ніякі символи пілот-сигналу не множилися на той самий другий код. Крім того, сектори можуть використовувати різні комбінації з деяких тих же або деяких різних кодів. У деяких випадках може бути бажане, щоб символи пілот-сигналу займали той самий набір частот у різних секторах. Тому, якщо використовується стрибкоподібна зміна частоти пілот-сигналу, ми повинні забезпечити, щоб ця зміна була однаковою для різних секторів. На Фіг.2 проілюстрована схема розподілу частотного спектра для системи бездротового зв'язку з множинним доступом. Множина символів 200 OFDM розподілена по Τ періодам символу і S частотним піднесучим. Кожний символ 200 OFDM містить один період символу з Τ періодів символу і тон або частотну піднесучу з S піднесучих. У системі OFDM з стрибкоподібною зміною частоти один або кілька символів 200 можуть призначатися даному терміналу доступу. В одному варіанті здійснення схеми розподілу, як показано 11 на Фіг.2, одна або декілька областей стрибка, наприклад, область 202 стрибка, символів призначається групі терміналів доступу для здійснення зв'язку по висхідній лінії зв'язку. У межах кожної області стрибка призначення символів може рандомізуватися для зниження потенційних перешкод і забезпечення частотного рознесення проти шкідливих ефектів, пов'язаних з багатопроменевим проходженням сигналу. Кожна область 202 стрибка містить у собі символи 204, які призначаються одному або декільком терміналам доступу, які здійснюють зв'язок з сектором крапки доступу і призначені області стрибка. Протягом кожного періоду стрибка, або кадра, місце розташування області 202 стрибка в межах Τ періодів символу і S піднесучих змінюється згідно з послідовністю стрибкоподібної зміни. До того ж, призначення символів 204 для індивідуальних терміналів доступу в межах області 202 стрибка може змінюватися для кожного періоду стрибка. На Фіг.3 наведена система бездротового зв'язку з множинним доступом згідно з іншим варіантом здійснення. Система 600 бездротового зв'язку з множинним доступом містить у собі множину стільників, наприклад, стільники 602, 604 і 606. У варіанті здійснення, наведеному на Фіг.3, кожний стільник 602, 604 і 606 містить у собі множину секторів (не показані), які здійснюють зв'язок з мобільними станціями 620. Як говорилося вище, кожний стільник 602, 604 і 606 може використовувати різні специфічні для стільника коди скремблювання для множення символів пілот-сигналу, переданих від її секторів. Кожний сектор може потім працювати згідно з будь-яким варіантом і використовувати будь-які описані в даному документі відмітні ознаки. На Фіг.4 наведена блок-схема варіанту здійснення передавальної системи 810 і приймальної системи 850 у системі 800 з множинним входом і множинним виходом (ΜΙΜΟ). У передавальній системі 810 дані трафіку для деяких потоків даних надходять від джерела 812 даних на процесор 814 переданих (ТХ) даних. В одному варіанті здійснення кожний потік даних передається через відповідну передавальну антену. Процесор 814 даних, що передаються, форматує, кодує і перемежовує дані трафіку для кожного потоку даних на основі певної схеми кодування, вибраної для цього потоку даних для забезпечення кодованих даних. Кодовані дані для кожного потоку даних можуть мультиплексуватися з даними пілот-сигналу за допомогою способів OFDM. Дані пілот-сигналу звичайно являють собою відому комбінацію даних, яка обробляється відомим чином і може використовуватися в приймальній системі для оцінювання відгуку каналу. Мультиплексовані дані пілотсигналу і кодовані дані для кожного потоку даних потім модулюються (тобто, відображаються у символи) на основі певної схеми модуляції {наприклад, BPSK, QSPK, M-PSK або M-QAM), вибраної для цього потоку даних для забезпечення модуляційних символів. Швидкість передачі, кодування і модуляція даних для кожного потоку даних може визначатися командами, які виконуються процесором 830. 91881 12 Модуляційні символи для всіх потоків даних надходять потім на ТХ-процесор 820, який може виконати наступну обробку модуляційних символів (наприклад, для OFDM). Потім ТХ-процесор 820 подає Ντ потоків модуляційних символів на ΝΤ передавачів (TMTR) 822a-822t. Кожний передавач 822 приймає і обробляє відповідний потік символів для видачі одного або декількох аналогових сигналів і потім перетворює (наприклад, підсилює, фільтрує або підвищує частоту) аналогові сигнали для забезпечення модульованого сигналу, придатного для передачі по каналу ΜΙΜΟ. ΝΤ модульованих сигналів від передавачів 822а-822t потім передаються від ΝΤ антен відповідно 824а-824t. У приймальній системі 850 передані модульовані сигнали приймаються NR антенами 852а-852r, і прийнятий сигнал від кожної антени 852 надходить на відповідний приймач (RCVR) 854. Кожний приймач 854 перетворює (наприклад, фільтрує, підсилює або знижує частоту) відповідного прийнятого сигналу, оцифровує перетворений сигнал для одержання вибірок і потім обробляє вибірки для одержання відповідного "прийнятого" потоку символів. Процесор 860 прийнятих (RX) даних потім приймає і обробляє NR прийнятих потоків символів від NR приймачів 854 на основі певного способу обробки, здійснюваної приймачем, для одержання ΝΤ "детектованих" потоків символів. Обробка процесором 860 прийнятих даних більш докладно описана нижче. Кожний детектований потік символів містить в собі символи, які служать оцінками модуляційних символів, переданих для відповідного потоку даних. Процесор 860 прийнятих даних виконує демодуляцію, обернене перемежовування і декодування кожного детектованого потоку даних для відновлення даних трафіку для потоку даних. Обробка здійснюється процесором 860 прийнятих даних, є зворотною по відношенню до обробки, виконуваної ТХ-процесором 820 і процесором 814 переданих даних у передавальній системі 810. RX-процесор 860 може вивести оцінку відгуку каналу між ΝΤ передавальними і NR приймальнями антенами, наприклад, на основі інформації пілотсигналу, мультиплексованою з даними трафіку. RX-процесор 860 може ідентифіковувати символи пілот-сигналу за характеристиками символів пілотсигналу, що зберігаються в пам'яті, наприклад, у пам'яті 872, які вказують частотну піднесучу і період символу, привласнений кожному символу пілотсигналу. Крім того, у пам'яті можуть зберігатися код скремблювання для стільника і специфічний для сектора коди, наприклад, другі коди з низькою взаємною кореляцією, так щоб RX-процесор міг використовувати їх для множення прийнятих символів з метою належного декодування. Оцінку відгуку каналу, що генерується RXпроцесором 860, можна використовувати для виконання просторової, просторово-часової обробки в приймачі, коректування рівнів потужності, зміни схеми або швидкостей модуляції або інших дій. RX-процесор 860 може додатково оцінювати відношення сигналу до суми перешкоди з шумом (SNR) детектованих потоків символів і, можливо, інші характеристики каналу, і видає ці величини на 13 процесор 870. RX-процесор 860 даних або процесор 870 можуть, крім того, вивести оцінку "робочого" SNR для системи. Потім процесор 870 видає інформацію про стан каналу (CSI), яка може містити різного роду інформацію, що стосується лінії зв'язку і (або) прийнятого потоку даних. Наприклад, CSI може містити тільки робоче SNR. Потім CSI обробляється процесором 878 переданих даних, модулюється модулятором 880, модифікується передавачами 8 54а-8 54r і передається назад у передавальну систему 810. У передавальній системі 810 модульовані сигнали від приймальної системи 850 приймаються антенами 824, модифікуються приймачами 822, демодулюються демодулятором 840 і обробляються процесором 842 прийнятих даних для відновлення інформації CSI, переданої приймальною системою. Передана CSI подається потім на процесор 830 і використовується (1) для визначення швидкостей передачі даних і схем кодування і модуляції, які слід використовувати для потоків даних, і (2) для вироблення різних керуючих сигналів для процесора 814 переданих даних і ТХпроцесора 820. Або ж інформація CSI може використовуватися процесором 870 для визначення, нарівні з іншою інформацією, схем модуляції і (або) швидкостей кодування для передачі. Ці параметри можуть потім надійти в передавач, який використовує цю інформацію, яка може бути розбита на підгрупи, для забезпечення наступних передач у приймач. Процесори 830 і 870 керують відповідно роботою передавальної і приймальні систем. Пам'ять 832 і пам'ять 872 забезпечують зберігання програмних кодів і даних, що використовуються відповідно процесорами 830 і 870. Пам'ять 832 і пам'ять 872 зберігають специфічні для стільника послідовності скремблювання, а також перші і другі коди з низькими взаємними кореляціями. У залежності від ситуації процесори 830 і 870 можуть потім використовувати специфічну для стільника послідовність скремблювання і перші й другі коди з низькою взаємною кореляцією для множення символів пілот-сигналу для кожного сектора. У приймачі можуть застосовуватися різні способи обробки для обробки NR прийнятих сигналів, щоб можна було детектувати ΝΤ переданих потоків символів. Ці способи обробки, застосовувані в приймачі, можна розбити на дві основні категорії: (і) застосовувані в приймачі способи просторової і просторово-часової обробки (які також називаються способами вирівнювання); і (іі) застосовуваний у приймачі спосіб "послідовного обнулення/вирівнювання і придушення перешкод" (який також називається "послідовним придушенням перешкод" або "послідовним придушенням"). Хоча на Фіг.4 розглянута система ΜΙΜΟ, таку ж систему можна застосувати до системи з множинними входами і одним виходом, коли множина передавальних антен, наприклад, що знаходяться на базовій станції, передають один або декілька потоків даних єдиному антенному пристрою, наприклад мобільній станції. Крім того, аналогічним чином, описаним з посиланням на Фіг.4, можна 91881 14 використовувати антенну систему з одним виходом і одним входом. На Фіг.5 наведена блок-схема послідовності операцій способу призначення символів пілотсигналу згідно з одним варіантом здійснення. Виробляється множина символів пілот-сигналу, блок 900. Потім використовується перший код для сектора для множення вибірок символів пілотсигналу, блок 902. Потім до символів пілот-сигналу застосовується другий код для сектора, блок 904. У деяких випадках другий код є постійним на довжині першого коду. В інших випадках другий код може бути будь-якої довжини і змінюватися на довжині першого коду. Крім того, множина прикладів першого коду можуть множитися на різні другі коди. Помножені символи потім передаються, блок 906. На Фіг.6 наведена блок-схема варіантів частин багатосекторної базової станції. Базова станція може містити в собі множину секторів, на кресленні в ілюстративних цілях наведені тільки два. Однак можна використовувати будь-яке число секторів, наприклад, три, як показано на Фіг.1. Кожний сектор містить у собі засіб для множення символів пілот-сигналу на перший код і другі коди, відповідно блоки 1000 і 1004. Коди відрізняються один від одного і можуть мати однакову довжину, причому для кожної групи символів пілот-сигналу, помножених на перший код, використовуються різні другі коди. Для передачі помножених символів пілотсигналу використовується пара відповідних передавачів (відповідно блоки 1002 і 1006). Описані у даному документі способи можуть бути реалізовані різними засобами. Наприклад, ці способи можуть бути реалізовані апаратними засобами, програмними засобами і їх комбінацією. У випадку апаратної реалізації блок обробки в базовій станції або мобільній станції можуть бути реалізовані у вигляді спеціалізованих інтегральних схем (ASIC), процесорів цифрових сигналів (DSP), пристроїв обробки цифрових сигналів (DSPD), програмованих логічних пристроїв (PLD), логічних матриць, програмованих користувачем (FPGA), процесорів, контролерів, мікроконтролерів, мікропроцесорів і інших електронних пристроїв, призначених для виконання описаних тут функцій, або комбінації цих пристроїв. У випадку програмної реалізації описані у даному документі способи можуть бути реалізовані у вигляді команд (наприклад, процедур, функцій і т.д.), які можуть використовуватися одним або декількома процесорами для виконання описаних тут функцій. Команди можуть зберігатися в запам'ятовуючих пристроях і виконуватися процесорами. Запам'ятовуючий пристрій може бути виконаний всередині процесора або бути зовнішнім відносно процесора, причому в останньому випадку він повинен бути з'єднаний з можливістю обміну даними з процесором за допомогою різних засобів, відомих з рівня техніки. Наведений вище опис розкритих варіантів здійснення презентовано для того, щоб будь-який фахівець у даній галузі техніки міг створити або використовувати даний винахід. Різні модифікації цих варіантів здійснення можуть явним чином ви 15 пливати для цих фахівців у даній галузі техніки, і загальні принципи, розкриті в даному документі, можуть застосовуватися до інших варіантів здійснення без відступу від суті і об'єму винаходу. Таким чином, мається на увазі, що даний винахід не 91881 16 обмежується наведеними варіантами здійснення, але повинен відповідати найбільшому об'єму, який узгоджується з розкритими в даному документі принципами і новими ознаками. 17 91881 18 19 Комп’ютерна верстка Л. Купенко 91881 Підписне 20 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюTransmission of pilot symbols in wireless communication systems
Автори англійськоюKhandekar, Aamod, Agrawal, Avneesh, Gore Dhanandzhaj Ashok
Назва патенту російськоюПередача пилот сигналов в системах беспроводной связи
Автори російськоюКхандекар Аамод, Агравал Авниш, Горе Дхананджай Ашок
МПК / Мітки
МПК: H04B 7/06, H04W 4/20, H04J 11/00
Мітки: пілот-сигналів, передача, зв'язку, безпровідного, символів, системах
Код посилання
<a href="https://ua.patents.su/10-91881-peredacha-simvoliv-pilot-signaliv-v-sistemakh-bezprovidnogo-zvyazku.html" target="_blank" rel="follow" title="База патентів України">Передача символів пілот-сигналів в системах безпровідного зв’язку</a>
Спосіб та пристрій пошуку пілот-сигналу у системі безпровідного зв’язку
Номер патенту: 71022
Опубліковано: 15.11.2004
Автор: Соліман Самір С.
МПК: H04B 1/707, H04Q 7/38
Мітки: пілот-сигналу, системі, безпровідного, спосіб, зв'язку, пошуку, пристрій
Формула / Реферат:
1. Спосіб пошуку пілот-сигналу у системі безпровідного зв'язку, який включає: -визначення місцеположення мобільної станції у зазначеній системі безпровідного зв'язку, -визначення сукупності розмірів вікон пошуку, що відповідає сукупності пілот-сигналів, базуючись на зазначеному місцеположенні мобільної станції відносно відповідного місцеположення передавального джерела зазначеної сукупності пілот-сигналів.2. Спосіб за п....
Способи та пристрої для передачі і прийому пілот-сигналу і даних з швидким стрибкоподібним перестроюванням частоти з мультиплексованим з кодовим розділенням пілот-сигналом у системі мдочр
Номер патенту: 88873
Опубліковано: 10.12.2009
Автори: Агравал Авніш, Тіг Едвард Харрісон
МПК: H04B 7/00, H04B 7/212
Мітки: мультиплексованим, пілот-сигналу, перестроюванням, способи, даних, кодовим, швидким, частоти, пілот-сигналом, розділенням, прийому, пристрої, передачі, мдочр, стрибкоподібним, системі
Формула / Реферат:
1. Спосіб передачі широкосмугового пілот-сигналу у системі безпровідного зв'язку з множинними несучими, який полягає у тому, що обробляють щонайменше один символ пілот-сигналу псевдовипадковим числовим (PN) кодом для одержання послідовності чіпів пілот-сигналу для широкосмугового пілот-сигналу, обробляють символи даних відповідно до схеми модуляції множинних несучих для одержання послідовності чіпів даних, мультиплексують з часовим...
Спосіб створення допоміжного пілот-сигналу, спосіб його прийому і пристрій для його здійснення та спосіб індивідуальної передачі
Номер патенту: 63963
Опубліковано: 16.02.2004
Автори: Ландбі Стайн А., Оденвалдер Джозеф П., Тідеманн Едвард Г., мол.
МПК: H04B 1/707, H04B 7/26, H04J 11/00
Мітки: передачі, пристрій, допоміжного, здійснення, індивідуальної, пілот-сигналу, спосіб, створення, прийому
Формула / Реферат:
1. Спосіб створення допоміжного пілот-сигналу, який передбачає операції: прийому пілотних даних і покриття зазначених пілотних даних пілотною послідовністю Уолша, яку утворюють конкатенацією основної послідовності Уолша і її комплементарної послідовності.2. Спосіб за п. 1, який відрізняється тим, що зазначена основна послідовність Уолша є послідовністю нулів.3. Спосіб за п. 1, який відрізняється тим, що зазначена основна...
Передача пілот-сигналу та оцінка каналу для системи зв’язку, яка використовує мультиплексування з частотним розділенням каналів
Номер патенту: 90133
Опубліковано: 12.04.2010
Автори: Кхандекар Аамод, Паланкі Раві
МПК: H04L 27/26, H04B 1/69
Мітки: мультиплексування, передача, яка, пілот-сигналу, каналу, системі, зв'язку, розділенням, використовує, частотним, каналів, оцінка
Формула / Реферат:
1. Пристрій для генерування пілот-сигналу в системі зв'язку, який містить:блок обробки, призначений для генерування першої послідовності пілотних символів, основуючись на багатофазній послідовності; імодулятор, призначений для одержання другої послідовності пілотних символів, основуючись на першій послідовності пілотних символів, і генерування послідовності виводжуваних символів, основуючись на другій послідовності пілотних...
Передача з множиною несучих з використанням множини розмірів символів ofdm
Номер патенту: 84411
Опубліковано: 27.10.2008
Автори: Кетчум Джон У., Говард Стівен Дж., Уолтон Джей Родні, Уоллейс Марк
МПК: H04L 27/26, H04L 25/02
Мітки: розмірів, символів, використанням, множиною, множині, несучих, передача
Формула / Реферат:
1. Спосіб передачі даних у комунікаційній системі з мультиплексуванням з ортогональним розділенням частот (OFDM), що включає в себе етапи, на яких:передають перший блок даних у першому OFDM символі першого розміру іпередають другий блок даних у другому OFDM символі другого розміру, який відрізняється від першого розміру.2. Спосіб за п. 1, в якому перший блок даних містить керуючі дані, а другий блок даних містить...
Попередній патент: Попереднє кодування для планування в безпровідних системах зв’язку, яке залежить від сегмента
Наступний патент: Пристрій для виконання точного розрізу шкіри з регульованим зусиллям
Випадковий патент: Драглеподібний харчовий продукт для ентерального харчування хворих в критичних станах