Пристрій та спосіб підрахунку та вимірювання витрати насінин

Формула / Реферат
1. Система для підрахунку насінин, яка включає
ділянку формування зображення,
пристрій зчитування зображення,
лінзу, розташовану між ділянкою формування зображення та пристроєм зчитування зображення, і
подовжувач оптичного шляху між ділянкою формування зображення та лінзою, за рахунок якого ефективна оптична відстань між ділянкою формування зображення та лінзою принаймні в п'ять разів перевищує фізичну відстань між ними.
2. Система за п. 1, у якій подовжувач оптичного шляху включає декілька дзеркал.
3. Система за п. 1 або 2, у якій подовжувач оптичного шляху включає пару по суті паралельних дзеркал.
4. Система за будь-яким з пп. 1-3, у якій пристрій зчитування зображення включає прилад із зарядовим зв'язком.
5. Система за будь-яким з пп. 1-4, у якій ділянка формування зображення має глибину, яка приблизно в 10-60 разів перевищує діаметр підраховуваних насінин.
6. Пристрій для вимірювання витрати частинок, який включає корпус із отвором у ньому,
датчик зображення, розташований на першому боці отвору,
джерело світла, розташоване на другому боці отвору, напроти першого боку,
лінзу, яка фокусує світло із джерела світла на датчик зображення та розташована на першій відстані від отвору, і
пару протилежних дзеркал, розташованих між лінзою та отвором
з можливістю відбиття випромінюваного джерелом світла від дзеркал таким чином, що відстань, яку світло проходить від джерела світла до лінзи, принаймні в п'ять разів перевищує першу відстань.
7. Пристрій за п. 6, у якому датчик зображення включає прилад із зарядовим зв'язком.
8. Пристрій за п. 6 або 7, у якому протилежні дзеркала в основному паралельні одне одному.
9. Пристрій за будь-яким з пп. 6-8, у якому пара протилежних дзеркал являє собою пару дзеркал із протилежно розташованими поверхнями, на кожну з яких нанесений дзеркально відбивний матеріал.
10. Пристрій за будь-яким з пп. 6-9, який додатково включає аналогово-цифровий перетворювач для перетворення аналогового сигналу даних датчика зображення на цифровий сигнал.
11. Пристрій за п. 10, який додатково включає фільтр для фільтрації цифрового сигналу.
12. Пристрій за будь-яким з пп. 6-11, який додатково включає мікропроцесор для підрахунку зображень, що зчитуються датчиком зображення.
13. Пристрій за будь-яким з пп. 6-12, який додатково включає мікропроцесор для вимірювання часового інтервалу, що минув між зображеннями, що йдуть одне за одним, одержуваними датчиком зображення.
14. Спосіб вимірювання характеристик потоку роздільних частинок, глибина якого приблизно в 10-60 разів перевищує розмір частинок, що включає стадії на яких:
пропускають потік частинок через ділянку вимірювань, глибина якої дорівнює ширині потоку або більше ширини потоку,
при проходженні потоку частинок через ділянку вимірювань одержують по суті сфокусоване зображення в основному кожної частинки в потоці незалежно від положення частинки в ділянці вимірювань, і
аналізують одержані зображення частинок для визначення принаймні однієї характеристики потоку частинок.
15. Спосіб за п. 14, у якому характеристикою є кількість частинок у потоці.
16. Спосіб за п. 14 або 15, у якому характеристикою є часовий інтервал між частками в потоці, що йдуть одна за одною.
17. Спосіб за будь-яким з пп. 14-16, у якому додатково генерують цифровий сигнал, який відображає розмір і різкість зображення кожної частинки в потоці, і при цьому аналіз отриманих зображень частинок включає аналіз цифрового сигналу.
18. Спосіб за будь-яким з пп. 14-17, у якому потік являє собою потік частинок принаймні двох різних розмірів, а характеристикою є число частинок у потоці, розмір яких дорівнює або перевищує попередньо вибраний розмір.
19. Спосіб за будь-яким з пп. 14-18, у якому потік являє собою потік частинок принаймні двох різних розмірів, а характеристикою є витрата частинок у потоці, розмір яких дорівнює або перевищує попередньо вибраний розмір.
20. Компактний пристрій для підрахунку насінин, який включає засіб одержання в основному різкого зображення насінини у по суті диспергованому потоці насінин, який має середню вісь, що забезпечує в основному різке зображення кожної насінини в потоці незалежно від відстані до насінини від осі потоку.
21. Пристрій за п. 20, у якому засіб одержання в основному різкого зображення включає
датчик зображення;
лінзу, яка фокусує зображення насінин на датчик зображення та розташовану між датчиком зображення й середньою віссю потоку на першій відстані від середньої осі потоку, і
декілька дзеркал, установлених з можливістю забезпечення ефективної оптичної відстані між середньою віссю потоку та лінзою, яка принаймні приблизно в п'ять разів перевищує першу відстань.
22. Пристрій за п. 21, у якому датчик зображення включає прилад із зарядовим зв'язком.
23. Пристрій за будь-яким з пп. 20-22, який додатково включає засіб вибірного підрахунку частинок, розмір яких дорівнює або перевищує попередньо вибраний розмір.
24. Пристрій за п. 23, у якому засіб вибірного підрахунку включає
аналогово-цифровий перетворювач для перетворення аналогового сигналу даних у вигляді зображення на цифровий сигнал зображення, що відображає розміри зображуваних частинок, і
фільтр для фільтрації цифрового сигналу з метою видалення даних, що відображають частинки, розмір яких менше попередньо вибраного розміру частинок.
25. Пристрій за будь-яким з пп. 20-24, у якому засіб одержання в основному різкого зображення насінини у по суті диспергованому потоці насінин здатний давати в основному різке зображення кожної насінини в потоці, що рухається зі швидкістю приблизно 10-20 насінин на секунду.
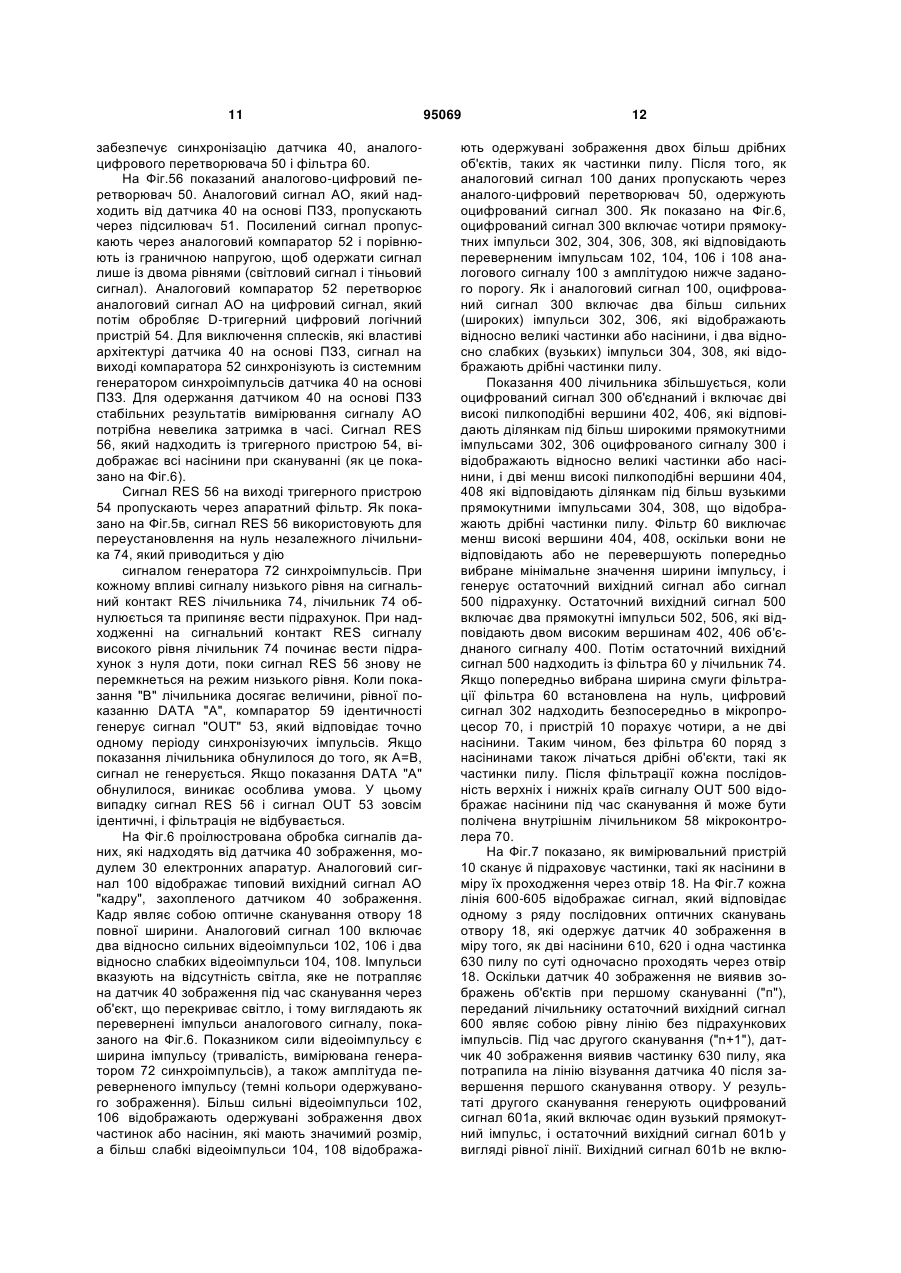
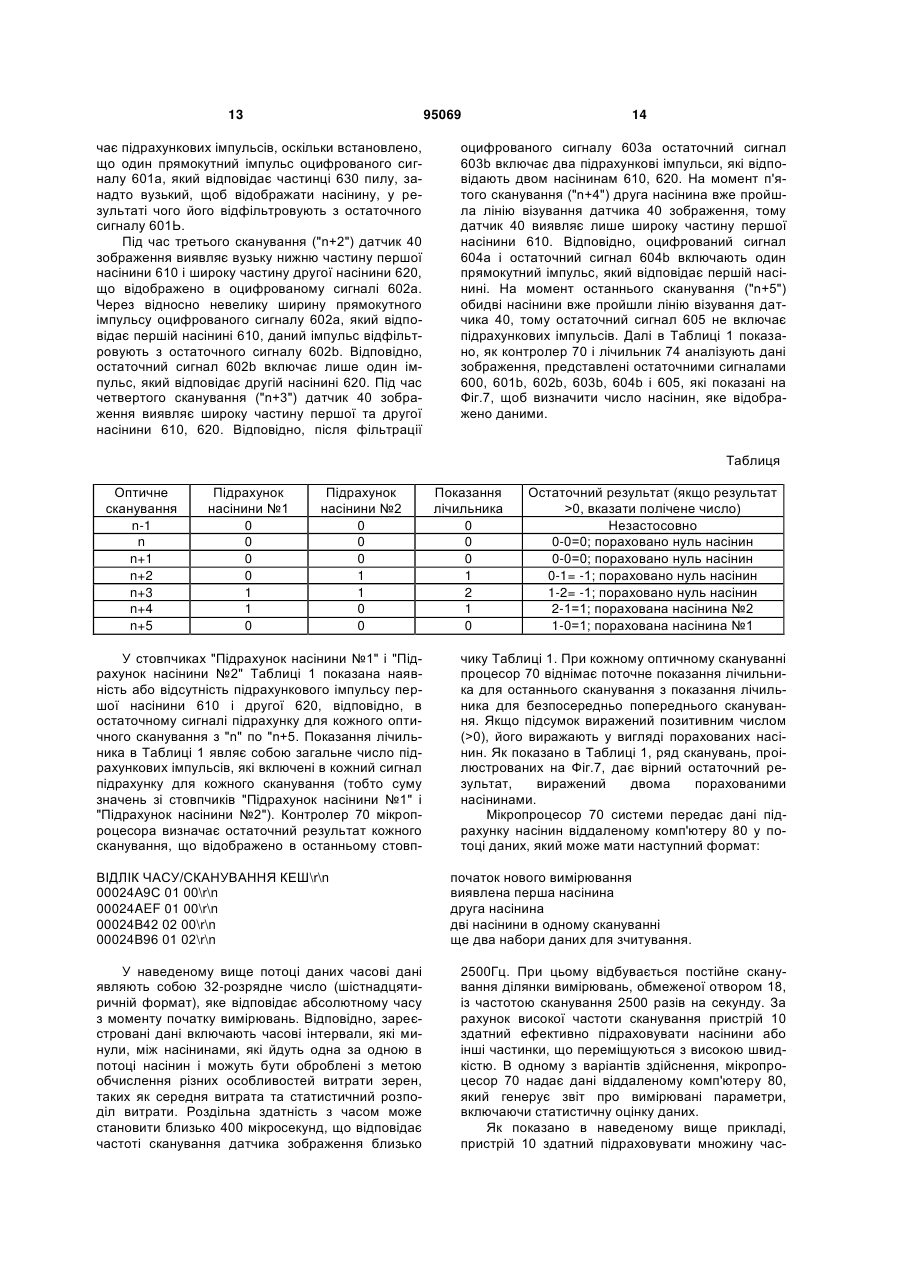
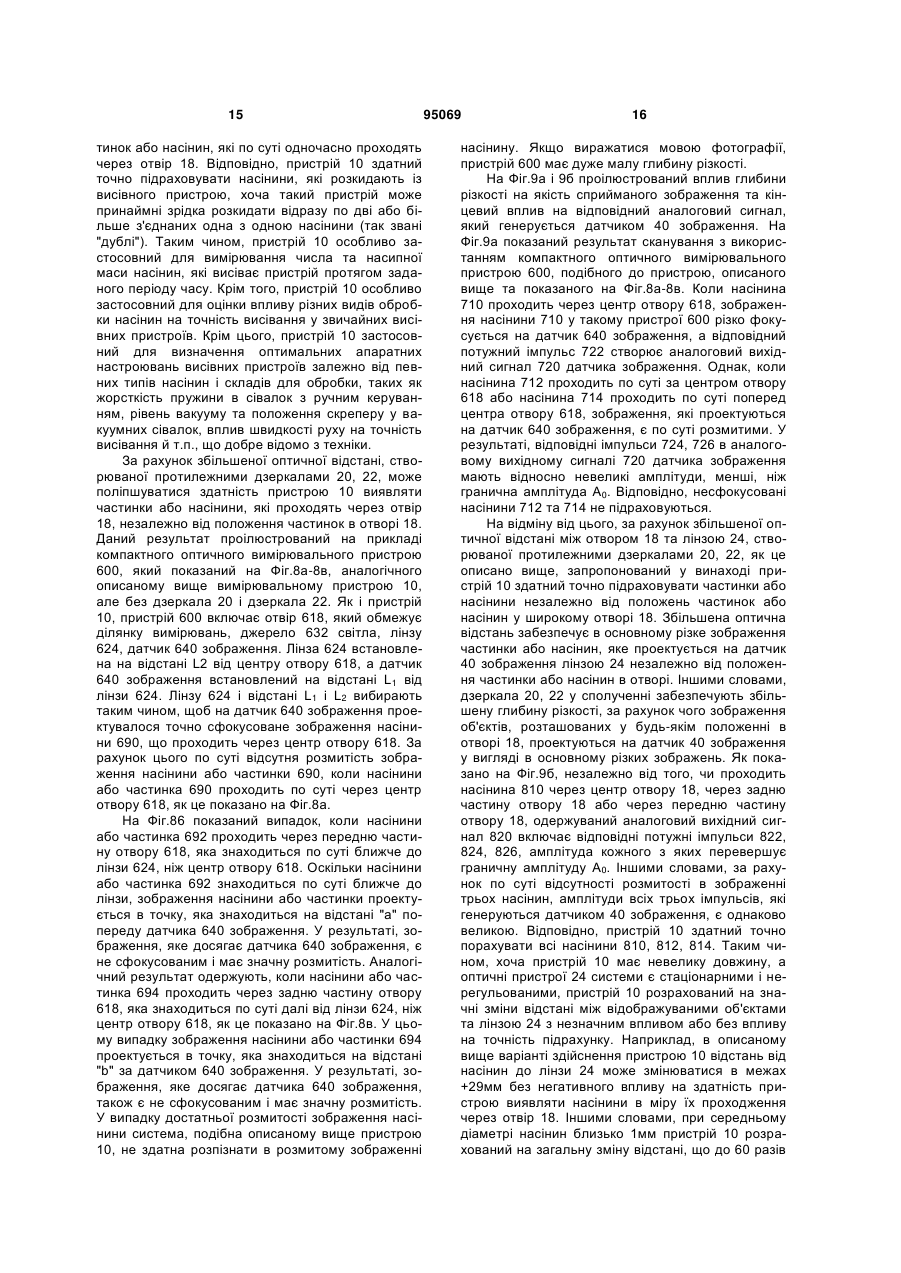
Текст
1. Система для підрахунку насінин, яка включає ділянку формування зображення, пристрій зчитування зображення, лінзу, розташовану між ділянкою формування зображення та пристроєм зчитування зображення, і подовжувач оптичного шляху між ділянкою формування зображення та лінзою, за рахунок якого ефективна оптична відстань між ділянкою формування зображення та лінзою принаймні в п'ять разів перевищує фізичну відстань між ними. 2. Система за п.1, у якій подовжувач оптичного шляху включає декілька дзеркал. 3. Система за п.1 або 2, у якій подовжувач оптичного шляху включає пару по суті паралельних дзеркал. 4. Система за будь-яким з пп.1-3, у якій пристрій зчитування зображення включає прилад із зарядовим зв'язком. 5. Система за будь-яким з пп.1-4, у якій ділянка формування зображення має глибину, яка приблизно в 10-60 разів перевищує діаметр підраховуваних насінин. 6. Пристрій для вимірювання витрати частинок, який включає корпус із отвором у ньому, датчик зображення, розташований на першому боці отвору, джерело світла, розташоване на другому боці отвору, напроти першого боку, лінзу, яка фокусує світло із джерела світла на датчик зображення та розташована на першій відстані від отвору, і пару протилежних дзеркал, розташованих між лінзою та отвором 2 (19) 1 3 95069 4 розмір і різкість зображення кожної частинки в потоці, і при цьому аналіз отриманих зображень частинок включає аналіз цифрового сигналу. 18. Спосіб за будь-яким з пп.14-17, у якому потік являє собою потік частинок принаймні двох різних розмірів, а характеристикою є число частинок у потоці, розмір яких дорівнює або перевищує попередньо вибраний розмір. 19. Спосіб за будь-яким з пп.14-18, у якому потік являє собою потік частинок принаймні двох різних розмірів, а характеристикою є витрата частинок у потоці, розмір яких дорівнює або перевищує попередньо вибраний розмір. 20. Компактний пристрій для підрахунку насінин, який включає засіб одержання в основному різкого зображення насінини у по суті диспергованому потоці насінин, який має середню вісь, що забезпечує в основному різке зображення кожної насінини в потоці незалежно від відстані до насінини від осі потоку. 21. Пристрій за п.20, у якому засіб одержання в основному різкого зображення включає датчик зображення; лінзу, яка фокусує зображення насінин на датчик зображення та розташовану між датчиком зображення й середньою віссю потоку на першій відстані від середньої осі потоку, і декілька дзеркал, установлених з можливістю забезпечення ефективної оптичної відстані між середньою віссю потоку та лінзою, яка принаймні приблизно в п'ять разів перевищує першу відстань. 22. Пристрій за п.21, у якому датчик зображення включає прилад із зарядовим зв'язком. 23. Пристрій за будь-яким з пп.20-22, який додатково включає засіб вибірного підрахунку частинок, розмір яких дорівнює або перевищує попередньо вибраний розмір. 24. Пристрій за п.23, у якому засіб вибірного підрахунку включає аналогово-цифровий перетворювач для перетворення аналогового сигналу даних у вигляді зображення на цифровий сигнал зображення, що відображає розміри зображуваних частинок, і фільтр для фільтрації цифрового сигналу з метою видалення даних, що відображають частинки, розмір яких менше попередньо вибраного розміру частинок. 25. Пристрій за будь-яким з пп.20-24, у якому засіб одержання в основному різкого зображення насінини у по суті диспергованому потоці насінин здатний давати в основному різке зображення кожної насінини в потоці, що рухається зі швидкістю приблизно 10-20 насінин на секунду. Даний винахід стосується пристроїв та способів вимірювання кількості та витрати (частоти) насінин у потоці, більш конкретно, винахід стосується компактного пристрою та способу для точного вимірювання кількості та витрати насінин або зерен у диспергованому потоці насінин або зерен, що швидко переміщається, який видається висівним пристроєм. Висівні пристрої використовують для відкладення або посіву окремих насінин із партії насіння. Такі висівні пристрої звичайно являють собою механічні пристрої, установлені на транспортному засобі або причеплені до транспортного засобу, такого як трактор, при цьому висівні пристрої розкидають насінини рядами в процесі руху транспортних засобів по полях великої площі. Швидкість розкидання окремих насінин із висівного пристрою співвіднесена зі швидкістю транспортного засобу. Швидкість висівання у висівних пристроях регулюють за допомогою вимірювальних пристроїв різних типів, при цьому вона залежить від швидкості транспортного засобу. Наприклад, для висівного пристрою може бути вибрана бажана швидкість висіванні при швидкості руху транспортного засобу по полю близько 10км/годину. На практиці швидкість висіванні окремих насінин у звичайних сучасних висівних пристроїв становить приблизно 10-20 насінин на секунду. Здатність таких висівних пристроїв розкидати насінин з постійною та по суті постійною швидкістю є визначальною для фермерів і виробників сільськогосподарської продукції для того, щоб рівномірно та належним чином розподіляти по засівній площі велику кількість насінин для одержання бажаної поакрової урожайності. Відповідно, для фермерів і виробників сільського сподарської продукції важливу роль відіграє відповідне настроювання та калібрування висівних пристроїв. Щоб відповідним чином настроїти та калібрувати такій висівний пристрій, необхідний правильно вести підрахунок насінин та вимірювати їх витрату в потоці насінин у процесі розкидання насінин із висівного пристрою. Однак точне вимірювання може бути складним завданням через високі швидкості подачі насінин у висівних пристроях. Перед висівом насінники звичайно піддають насінини та зерна попередній обробці, щоб підсилити одну або декілька властивостей насінин або зерен. Така обробка насінин може включати, наприклад, нанесення на зовнішні поверхні насінин або зерен покриття. Склади деяких поверхневих покриттів здатні впливати на точність або характеристики висівання звичайних висівних пристроїв, коли такі пристрої використовують для висівання оброблених насінин. Наприклад, покриття для обробки здатні змінювати природну шорсткість або гладкість поверхні насінин або здатні викликати небажане злипання насінин, що позначається на взаємодії між обробленими насінинами та висівними пристроями. Таким чином, існує потреба в точній оцінці впливу конкретних видів обробки на характеристики висівних пристроїв, щоб визначати оптимальні склади для обробки та способи нанесення покриттів і вибирати оптимальні настройки висівних пристроїв залежно від конкретних типів оброблених насінин. Відомі різні способи та пристрої для підрахунку та вимірювання витрати насінин у потоці насінин. Такі пристрої та способи використовують для вимірювання кількості та витрати (частоти) насі 5 нин, що розкидаються висівним пристроєм. Такі пристрої також застосовні для калібрування та випробування висівних пристроїв з метою забезпечення постійних і оптимальних характеристик. Одним з таких пристроїв є стрічковий конвеєр з масляним покриттям для уловлювання насінин, що розкидаються висівним пристроєм. У такому пристрої число та витрата насінин або зерен на конвеєрі є показниками фактичної швидкості висівання. На жаль, лічильники на основі масляних конвеєрів неефективні для вимірювання швидкості подачі насінин багатьох видів. Інші відомі вимірювальні пристрої включають електронні вимірювальні системи, у яких використовують датчики інфрачервоного випромінювання або подібних датчиків, що уловлюють проходження насінин, зерен або зернят через трубу або жолоб у міру їх розкидання з жолоба. На жаль, у відомих електронних вимірювальних пристроях звичайно використовують датчики, які працюють в одній смузі світлового випромінювання з обмеженою здатністю захвату зображення. Наприклад, такі пристрої не здатні ефективно реєструвати два об'єкти, які знаходяться поблизу один одного, які по суті одночасно проходять через датчик. Крім того, напрямок насінин через вузьку трубу або жолоб може позначитися на потоці вимірюваних об'єктів. Таким чином, відомі електронні вимірювальні пристрої недостатньо точні й не здатні з достатньою точністю вимірювати витрату насінин при висіванні для забезпечення оптимальних характеристик висівного пристрою. Таким чином, існує потреба у вимірювальному пристрої для контролю висівання та способі точного вимірювання кількості та витрати насінин на виході висівних пристроїв. Такий пристрій повинен забезпечувати точність підрахунку близько 99% або більше й бути здатним відрізняти насінини або зерна від більш дрібних частинок пилу або інших невеликих сторонніх частинок, які звичайно змішані з насінинами та зернами. Такий пристрій і спосіб також повинні забезпечувати реєстрацію даних, які стосуються витрати насінин при висіванні, у міру того, як насінини або зерна виходять безпосередньо з висівного пристрою без необхідності пропускати насінини через трубу, яка звужується, або лійку. Крім того, пристрій та спосіб повинні забезпечувати підрахунок насінин і вимірювання витрати насінин і зерен у потоці насінин або зерен, який швидко рухається та який має значну ширину та глибину. Наприклад, пристрій та спосіб повинні забезпечувати підрахунок насінин у потоці насінин, який швидко, рухається, ширина та глибина якого приблизно до 60 разів перевищує середній розмір насінин. Крім цього, пристрій повинен бути компактним і портативним, щоб його було зручно використовувати в полі. Компактна система для підрахунку насінин включає ділянку формування зображення, датчик зображення, лінзу та подовжувач оптичного шляху. Подовжувач оптичного шляху розташований між ділянкою формування зображення та лінзою. Подовжувач оптичного шляху ефективно збільшує оптичну відстань між ділянкою формування зо 95069 6 браження та лінзою, у результаті чого ефективна оптична відстань значно перевищує фізичну відстань між ділянкою формування зображення та лінзою. За рахунок збільшеної оптичної відстані збільшується глибина різкості зображення насінин, які проходять через ділянку формування зображення. В іншому варіанті здійснення винаходу запропонований спосіб підрахунку частинок заданого розміру в потоці окремих частинок, ширина якого принаймні приблизно в 10 разів перевищує розмір частинок. Спосіб включає стадію, на якій потік частинок пропускають через отвір, глибина якого дорівнює ширині потоку або більша ширини потоку. Спосіб також включає стадію, на якій у міру проходження потоку частинок через отвір одержують по суті сфокусоване зображення в основному кожної частинки в потоці частинок незалежно від положення частинки в отворі. Крім того, спосіб включає стадію, на якій аналізують одержані зображення частинок, щоб визначити принаймні одну характеристику потоку частинок. В іншому варіанті здійснення винаходу запропонований компактний пристрій для підрахунку насінин, який включає засіб одержання в основному різкого зображення насінини у по суті диспергованому потоці насінин, який має середню вісь потоку. Засіб одержання в основному різкого зображення здатний забезпечувати в основному різке зображення кожної насінини в потоці незалежно від відстані від насінини до осі потоку. У додатковому варіанті здійснення винаходу запропонований пристрій для вимірювання витрати частинок. Пристрій включає корпус із отвором, датчик зображення, розташований на першому боці отвору, і джерело світла на другому боці отвору напроти першого боку. Лінза фокусує світло, яке надходить із джерела світла, на датчику зображення й розташована на першій відстані від отвору. Пара дзеркал, розташованих навпроти один одного між лінзою та отвором, відбиває світло, яке надходить із джерела світла, таким чином, що на шляху до лінзи світло повинно пройти відстань, що значно перевищує першу відстань. Нижче винахід більш докладно розглянутий з посиланням на прикладені креслення, на яких показано: на Фіг.1 - вигляд у перспективі одного з варіантів здійснення запропонованого у винаході вимірювального пристрою в процесі вимірювання розкидання насінин із типового висівного пристрою, на Фіг.2 - вигляд у вертикальному поперечному розрізі по лінії 2-2 на Фіг.3 одного з варіантів здійснення запропонованого у винаході вимірювального пристрою, показаного на Фіг.1, на Фіг.3 - горизонтальна поперечна проекція по лінії 3-3 на Фіг.2 вимірювального пристрою, показаного на Фіг.1 і Фіг.2, на Фіг.4 - блок схема, яка ілюструє дію приладу із зарядовим зв'язком (ПЗЗ) для застосування у вимірювальному пристрої, показаному на Фіг.1-3, на Фіг.5а - блок схема, яка ілюструє взаємозв'язок між різними електронними частинами вимірювального пристрою, показаного на Фіг.1-3, 7 на Фіг.5б - блок схема, яка ілюструє конструкцію аналогового електронного блоку для застосування у вимірювальному пристрої, показаному на Фіг.1-3, на Фіг.5в - блок схема, яка ілюструє конструкцію електронного фільтра та лічильника для застосування у вимірювальному пристрої, показаному на Фіг.1-3, на Фіг.6 - графічне представлення аналізу даних у вигляді зображення вимірювальним пристроєм, показаним на Фіг.1-3, для підрахунку насінин і вимірювання часу/витрати, на Фіг.7 - графічне представлення послідовності оптичних сканувань, здійснених вимірювальним пристроєм, показаним на Фіг.1-3, на Фіг.8а-8в - схематичне представлення вимірювального пристрою, аналогічного пристрою, показаному на Фіг.1-3, але з меншою глибиною різкості, на Фіг.9а та 96 - графічні представлення збільшеної глибини різкості пристрою, показаного на Фіг.1-3, на Фіг.10 - принципова схема, яка ілюструє один з варіантів здійснення запропонованого у винаході способу вимірювання витрати та підрахунку насінин. На Фіг.1-3 проілюстрований один з варіантів здійснення запропонованого у винаході пристрою 10 для підрахунку та вимірювання витрати насінин. Як показано на Фіг.1, пристрій 10 розташований під розкидачем типового висівного пристрою 16. У процесі роботи висівного пристрою 16 окремі насінини через в основному постійні інтервали виходять із пристрою 16 через отвір 15 для розкидання насінин. Вимірювальний пристрій 10 розташований під отвором 15 таким чином, що насінини, які розкидаються, падають крізь отвір 18, який обмежує ділянку вимірювань. Пристрій 10 нерухомо закріплений під отвором 15 для розкидання насінин за допомогою затискача 14 або будь-якого іншого застосовного засобу, такого як гвинти й т.п.Результати вимірювань, одержувані вимірювальним пристроєм 10, надходять на віддалений комп'ютер або подібний пристрій по кабелю 13 для послідовної передачі даних. Як альтернатива, результати вимірювань можуть передаватися віддаленому комп'ютеру засобами бездротового зв'язку. Вимірювальний пристрій 10 застосовний для підрахунку насінин, хронометрування та вимірювання витрати потоку насінин по суті однакового розміру. Наприклад, вимірювальний пристрій 10 здатний здійснювати підрахунок і вимірювати витрату насінин або зерен у міру того, як потік насінин або зерен виходить із висівного пристрою 16. Використовуваний у даному описі термін "насінини" означає множину схожих насінин, зерен або зернят, які мають по суті однаковий розмір і застосовуються при висіванні. Такі насінини можуть включати, наприклад, дрібні насінини, такі як насінини каноли із середнім діаметром близько 1мм і великі насінини, такі як зерна кукурудзи або маїсу із середнім діаметром близько 5мм. Як показано на Фіг.2 та 3, пристрій 10 включає корпус 12. Через частину корпуса 12 проходить завантажувальний отвір 18 для насінин, який ви 95069 8 значає ділянку вимірювань насінин. Отвір 18 і ділянка вимірювань позначені на Фіг.3 заштрихованою навскіс ділянкою. У проілюстрованому варіанті здійснення отвір 18 має ширину (у напрямку "х") і глибину (у напрямку "z"), які приблизно в 10-60 разів перевищують середній діаметр насінин, підраховуваних пристроєм 10. Корпус 12 може бути виконаний з алюмінію або будь-якого іншого застосовного матеріалу. В одному з варіантів здійснення принаймні деякі внутрішні поверхні корпуса 12 можуть бути забарвлені в темні кольори, щоб звести до мінімуму світлове відбиття всередині корпуса 12. Переважно вимірювальний пристрій 10 має компактні розміри та форму, завдяки чому пристрій 10 легко переносити й просто встановлювати в робочому положенні, наприклад, показаному на Фіг.1. Наприклад, у варіанті здійснення, показаному на Фіг.1-3, пристрій 10 може мати довжину близько 360мм (близько 14,2 дюйма), висоту близько 98мм (близько 3,9 дюйма) і ширину близько 72мм (близько 2,8 дюйма). У даному варіанті здійснення пристрою 10 отвір 18 має розміри близько 58мм на близько 58мм (близько 2,3 дюйма на 2,3 дюйма). Ширина та глибина отвору 18 приблизно в 10 разів перевищує середній діаметр великих насінин, підраховуваних пристроєм 10, таких як насінини кукурудзи або маїсу, і приблизно в 60 разів перевищує середній діаметр дрібних насінин, підраховуваних пристроєм 10, таких як насінини каноли. Як показано на Фіг.2 і 3, на першому боці отвору 18 розташоване джерело 32 світла. Джерело 32 світла може проходити по суті за всією шириною отвору 18, як це показано на Фіг.3. Джерелом 32 світла може бути будь-яке джерело, здатне забезпечувати достатньо світла, щоб пристрій 10 правильно виявляв насінини попередньо вибраного розміру в міру того, як насінини проходять через отвір 18, що більш докладно описано далі. Одним із джерел 32 світла, застосовних у варіанті здійснення вимірювального пристрою 10, показаного на Фіг.1 і 2, є матриця із двадцяти двох світлодіодних ламп надяркого червоного світіння Kingbright № L-934SRC-G виробництва компанії "Kingbright Corporation". Поблизу кінця корпуса 12, протилежного джерелу 32 світла, розташований пристрій 40 зчитування зображення. Пристроєм 40 зчитування зображення також може бути будь-який фотодатчик, здатний правильно зчитувати зображення частинок у міру їх проходження через отвір 18. Використовуваний у даному описі термін "зображення" стосується оптичного або зорового представлення або відтворення об'єкта та може включати, наприклад, силует об'єкта. У варіанті здійснення пристрою 10, показаному на Фіг.2 і 3, пристроєм 40 зчитування зображення є прилад із зарядовим зв'язком (ПЗЗ). Датчик 40 на основі ПЗЗ включає множину фоточутливих напівпровідникових елементів (пікселів), які перетворюють світло на електронний заряд. Одним із ПЗЗ, застосовних у вимірювальному пристрої 10, є прилад TAOS, модель №. TSL202, виробництва компанії "Texas Advanced Optoelectronic Solutions, Inc". Прилад TSL202 ПЗС має дві 64-піксельні матриці. 9 На Фіг.4 проілюстровано, як ПЗЗ 40 діє як фотодатчик. Світло, яке падає на піксель 42, генерує фотострум, який потім акумулює активна інтегруюча схема 43, зв'язана з таким пікселем 42. Протягом акумулювання конденсатор з дискретизацією за допомогою аналогового перемикача з'єднаний з виходом інтегратора. Кількість заряду, яка акумулюється на кожному пікселі 42, 44, 46, 48, прямо пропорційна інтенсивності світла, яке падає на такий піксель, і часу акумулювання. Зсувний регістр 47 всередині датчика 40 на основі ПЗЗ через регулярні синхронізовані інтервали послідовно зсуває акумульований заряд кожного пікселю 42, 44, 46, 48 і т.д. у напрямку сусіднього пікселю. Щоб виділити аналоговий сигнал з датчика, необхідно сто двадцять вісім синхронізуючих імпульсів для зчитування всього регістра 43. Відповідно, кожний "пакет" заряду пропускають по кремнієвій підкладці матриці 40. Як тільки вхідний сигнал досягає останнього пікселю 48 матриці, заряд перетворюється на напругу, яка підсилює аналоговий блок 50 у вигляді вихідного підсилювача, у результаті чого одержують аналоговий вихідний сигнал (АО). У варіанті здійснення пристрою 10, показаному на Фіг.2 і 3, лінза 24 об'єктива проектує на датчик 40 зображення світлові зображення з ділянки вимірювань всередині отвору 18. Положення лінзи 24 об'єктива зафіксовано відносно датчика 40 зображення. Об'єкти всередині отвору 18 перекривають світло, яке надходить із джерела світла, і не дають частині світла досягати датчика 40 зображення. Відповідно, для датчика зображення об'єкти виглядають як темні обриси або тіні. В одному з варіантів здійснення пристрою 10 як лінза 24 може використовуватися лінза Componon-S 5,6/135 виробництва компанії "Jos. Schneider Optische Werke GmbH" з фокусною відстанню 135 mm. Перед тим, як досягти лінзи 24 об'єктива, світло із джерела 32 світла через вузький проріз 19 потрапляє на перше дзеркало 20 і потім переміщується за подовженим оптичним шляхом, який створений першим дзеркалом 20 і протилежним другим дзеркалом 22. Перше та друге дзеркала 20, 22 у сполученні утворюють подовжувач оптичного шляху. У проілюстрованому варіанті здійснення пристрою 10 дзеркала 20, 22 розташовані по суті паралельно одне одному та під кутом близько 3° до вертикалі. Друге дзеркало 22 розташоване трохи нижче першого дзеркала 20. Переважно кожне дзеркало 20, 22 має відбиваючий шар, розташований на його внутрішній поверхні, тобто поверхні, що напрямлена до іншого дзеркала 20, 22. Відбиваючі шари на напрямлених одна до одної поверхнях дзеркал 20, 22 запобігають перекручуванню зображення, яке у іншому випадку відбувалося б через заломлення променів скляною підкладкою дзеркал 20, 22. У проілюстрованому варіанті здійснення пристрою 10 дзеркала мають висоту близько 65мм, ширину близько 39,5мм і товщину близько 2мм. При такій конструкції світло із джерела 32 світла падає на відбиваючу поверхню першого дзеркала 20 і відбивається від неї в напрямку відбиваючої поверхні другого дзеркала 22. Світло багаторазово поперемінно відбивається 95069 10 від дзеркал 20, 22 доти, поки світло, відбите від нижньої частини другого дзеркала 22, не пройде під першим дзеркалом 20 і не потрапить на лінзу 24 об'єктива. У проілюстрованому варіанті здійснення пристрою 10 перед тим, як потрапити на лінзу 24, світло поперемінно відбивається до 18 разів. За рахунок цього по суті збільшується ефективна оптична відстань між центром отвору 18 і лінзою 24. У проілюстрованому на Фіг.1 і 2 варіанті здійснення пристрою 10, фізична відстань L] між лінзою 24 і центром отвору 18 становить близько 75 мм (близько 3 дюймів). Однак загальна оптична відстань, яку повинно пройти світло від центра отвору 18 між дзеркалами 20, 22 і до лінзи 24, становить близько 703мм (близько 27,7 дюйма). Відповідно, у проілюстрованому варіанті здійснення оптична відстань між лінзою 24 і центром отвору 18 приблизно від дев'яти до десяти разів більша даної фізичної відстані L] між лінзою 24 і отвором 18. В інших варіантах здійснення співвідношення ефективної оптичної відстані й дійсної відстані між отвором 18 і лінзою 24 може становити від близько 5:1 до близько 20:1. У ще одному варіанті здійснення співвідношення може становити від близько 7:1 до близько 15:1 або більш краще від близько 8:1 до близько 12:1. Зв'язок цієї збільшеної оптичної відстані зі здатністю компактного пристрою 10 одержувати різкі зображення частинок або насінин і, тим самим, підраховувати частинки або насінини розглянуто нижче. Для збільшення ефективної оптичної відстані необхідне відповідне збільшення ширини прорізу 19 з урахуванням більш широкої ефективної ділянку формування зображення. Крім того, для збільшення ефективної оптичної відстані також необхідне відповідне збільшення інтенсивності джерела 32 світла. Ефективну оптичну відстань можна змінювати шляхом зміни відстані між дзеркалами 20, 22 і/або нахилу дзеркал 20, 22. Вимірювальний пристрій 10 додатково включає модуль 30 електронних апаратур. Як показано на Фіг.5а, модуль 30 електронних апаратур включає аналоговий блок 50 у вигляді аналоговоцифрового перетворювача 50, апаратний фільтр 60 і мікропроцесор або мікроконтролер 70. Аналоговий вихідний сигнал (АО), який надходить від датчика 40 зображення, вводять у перетворювач 50. Перетворювач 50 підсилює аналоговий сигнал, пропускає аналоговий сигнал через компаратор і генерує відповідний цифровий сигнал (RES), який надходить у фільтр 60. Фільтр 60 видаляє із цифрового сигналу деякі дані (як це описано далі) і вводить остаточно фільтрований сигнал (OUT) у мікроконтролер 70. У проілюстрованому варіанті здійснення модуля 30 контролер 70 включає генератор 72 синхроімпульсів (CLK), лічильник 74 і порт 76 виводу даних. Як порт 76 виводу даних можна використовувати, наприклад, послідовний порт RS232 передачі даних віддаленому комп'ютеру 80. Як альтернатива, порт 76 виводу даних може являти собою бездротовий передавальний пристрій для передачі даних віддаленому бездротовому приймачу або подібному пристрою. Контролер 70 керує роботою датчика 40 зображення та 11 забезпечує синхронізацію датчика 40, аналогоцифрового перетворювача 50 і фільтра 60. На Фіг.56 показаний аналогово-цифровий перетворювач 50. Аналоговий сигнал АО, який надходить від датчика 40 на основі ПЗЗ, пропускають через підсилювач 51. Посилений сигнал пропускають через аналоговий компаратор 52 і порівнюють із граничною напругою, щоб одержати сигнал лише із двома рівнями (світловий сигнал і тіньовий сигнал). Аналоговий компаратор 52 перетворює аналоговий сигнал АО на цифровий сигнал, який потім обробляє D-тригерний цифровий логічний пристрій 54. Для виключення сплесків, які властиві архітектурі датчика 40 на основі ПЗЗ, сигнал на виході компаратора 52 синхронізують із системним генератором синхроімпульсів датчика 40 на основі ПЗЗ. Для одержання датчиком 40 на основі ПЗЗ стабільних результатів вимірювання сигналу АО потрібна невелика затримка в часі. Сигнал RES 56, який надходить із тригерного пристрою 54, відображає всі насінини при скануванні (як це показано на Фіг.6). Сигнал RES 56 на виході тригерного пристрою 54 пропускають через апаратний фільтр. Як показано на Фіг.5в, сигнал RES 56 використовують для переустановлення на нуль незалежного лічильника 74, який приводиться у дію сигналом генератора 72 синхроімпульсів. При кожному впливі сигналу низького рівня на сигнальний контакт RES лічильника 74, лічильник 74 обнулюється та припиняє вести підрахунок. При надходженні на сигнальний контакт RES сигналу високого рівня лічильник 74 починає вести підрахунок з нуля доти, поки сигнал RES 56 знову не перемкнеться на режим низького рівня. Коли показання "В" лічильника досягає величини, рівної показанню DATA "А", компаратор 59 ідентичності генерує сигнал "OUT" 53, який відповідає точно одному періоду синхронізуючих імпульсів. Якщо показання лічильника обнулилося до того, як А=В, сигнал не генерується. Якщо показання DATA "А" обнулилося, виникає особлива умова. У цьому випадку сигнал RES 56 і сигнал OUT 53 зовсім ідентичні, і фільтрація не відбувається. На Фіг.6 проілюстрована обробка сигналів даних, які надходять від датчика 40 зображення, модулем 30 електронних апаратур. Аналоговий сигнал 100 відображає типовий вихідний сигнал АО "кадру", захопленого датчиком 40 зображення. Кадр являє собою оптичне сканування отвору 18 повної ширини. Аналоговий сигнал 100 включає два відносно сильних відеоімпульси 102, 106 і два відносно слабких відеоімпульси 104, 108. Імпульси вказують на відсутність світла, яке не потрапляє на датчик 40 зображення під час сканування через об'єкт, що перекриває світло, і тому виглядають як перевернені імпульси аналогового сигналу, показаного на Фіг.6. Показником сили відеоімпульсу є ширина імпульсу (тривалість, вимірювана генератором 72 синхроімпульсів), а також амплітуда переверненого імпульсу (темні кольори одержуваного зображення). Більш сильні відеоімпульси 102, 106 відображають одержувані зображення двох частинок або насінин, які мають значимий розмір, а більш слабкі відеоімпульси 104, 108 відобража 95069 12 ють одержувані зображення двох більш дрібних об'єктів, таких як частинки пилу. Після того, як аналоговий сигнал 100 даних пропускають через аналого-цифровий перетворювач 50, одержують оцифрований сигнал 300. Як показано на Фіг.6, оцифрований сигнал 300 включає чотири прямокутних імпульси 302, 304, 306, 308, які відповідають переверненим імпульсам 102, 104, 106 і 108 аналогового сигналу 100 з амплітудою нижче заданого порогу. Як і аналоговий сигнал 100, оцифрований сигнал 300 включає два більш сильних (широких) імпульси 302, 306, які відображають відносно великі частинки або насінини, і два відносно слабких (вузьких) імпульси 304, 308, які відображають дрібні частинки пилу. Показання 400 лічильника збільшується, коли оцифрований сигнал 300 об'єднаний і включає дві високі пилкоподібні вершини 402, 406, які відповідають ділянкам під більш широкими прямокутними імпульсами 302, 306 оцифрованого сигналу 300 і відображають відносно великі частинки або насінини, і дві менш високі пилкоподібні вершини 404, 408 які відповідають ділянкам під більш вузькими прямокутними імпульсами 304, 308, що відображають дрібні частинки пилу. Фільтр 60 виключає менш високі вершини 404, 408, оскільки вони не відповідають або не перевершують попередньо вибране мінімальне значення ширини імпульсу, і генерує остаточний вихідний сигнал або сигнал 500 підрахунку. Остаточний вихідний сигнал 500 включає два прямокутні імпульси 502, 506, які відповідають двом високим вершинам 402, 406 об'єднаного сигналу 400. Потім остаточний вихідний сигнал 500 надходить із фільтра 60 у лічильник 74. Якщо попередньо вибрана ширина смуги фільтрації фільтра 60 встановлена на нуль, цифровий сигнал 302 надходить безпосередньо в мікропроцесор 70, і пристрій 10 порахує чотири, а не дві насінини. Таким чином, без фільтра 60 поряд з насінинами також лічаться дрібні об'єкти, такі як частинки пилу. Після фільтрації кожна послідовність верхніх і нижніх країв сигналу OUT 500 відображає насінини під час сканування й може бути полічена внутрішнім лічильником 58 мікроконтролера 70. На Фіг.7 показано, як вимірювальний пристрій 10 сканує й підраховує частинки, такі як насінини в міру їх проходження через отвір 18. На Фіг.7 кожна лінія 600-605 відображає сигнал, який відповідає одному з ряду послідовних оптичних сканувань отвору 18, які одержує датчик 40 зображення в міру того, як дві насінини 610, 620 і одна частинка 630 пилу по суті одночасно проходять через отвір 18. Оскільки датчик 40 зображення не виявив зображень об'єктів при першому скануванні ("п"), переданий лічильнику остаточний вихідний сигнал 600 являє собою рівну лінію без підрахункових імпульсів. Під час другого сканування ("n+1"), датчик 40 зображення виявив частинку 630 пилу, яка потрапила на лінію візування датчика 40 після завершення першого сканування отвору. У результаті другого сканування генерують оцифрований сигнал 601а, який включає один вузький прямокутний імпульс, і остаточний вихідний сигнал 601b у вигляді рівної лінії. Вихідний сигнал 601b не вклю 13 95069 чає підрахункових імпульсів, оскільки встановлено, що один прямокутний імпульс оцифрованого сигналу 601а, який відповідає частинці 630 пилу, занадто вузький, щоб відображати насінину, у результаті чого його відфільтровують з остаточного сигналу 601Ь. Під час третього сканування ("n+2") датчик 40 зображення виявляє вузьку нижню частину першої насінини 610 і широку частину другої насінини 620, що відображено в оцифрованому сигналі 602а. Через відносно невелику ширину прямокутного імпульсу оцифрованого сигналу 602а, який відповідає першій насінині 610, даний імпульс відфільтровують з остаточного сигналу 602b. Відповідно, остаточний сигнал 602b включає лише один імпульс, який відповідає другій насінині 620. Під час четвертого сканування ("n+3") датчик 40 зображення виявляє широку частину першої та другої насінини 610, 620. Відповідно, після фільтрації 14 оцифрованого сигналу 603а остаточний сигнал 603b включає два підрахункові імпульси, які відповідають двом насінинам 610, 620. На момент п'ятого сканування ("n+4") друга насінина вже пройшла лінію візування датчика 40 зображення, тому датчик 40 виявляє лише широку частину першої насінини 610. Відповідно, оцифрований сигнал 604а і остаточний сигнал 604b включають один прямокутний імпульс, який відповідає першій насінині. На момент останнього сканування ("n+5") обидві насінини вже пройшли лінію візування датчика 40, тому остаточний сигнал 605 не включає підрахункових імпульсів. Далі в Таблиці 1 показано, як контролер 70 і лічильник 74 аналізують дані зображення, представлені остаточними сигналами 600, 601b, 602b, 603b, 604b і 605, які показані на Фіг.7, щоб визначити число насінин, яке відображено даними. Таблиця Оптичне сканування n-1 n n+1 n+2 n+3 n+4 n+5 Підрахунок насінини №1 0 0 0 0 1 1 0 Підрахунок насінини №2 0 0 0 1 1 0 0 У стовпчиках "Підрахунок насінини №1" і "Підрахунок насінини №2" Таблиці 1 показана наявність або відсутність підрахункового імпульсу першої насінини 610 і другої 620, відповідно, в остаточному сигналі підрахунку для кожного оптичного сканування з "n" по "n+5. Показання лічильника в Таблиці 1 являє собою загальне число підрахункових імпульсів, які включені в кожний сигнал підрахунку для кожного сканування (тобто суму значень зі стовпчиків "Підрахунок насінини №1" і "Підрахунок насінини №2"). Контролер 70 мікропроцесора визначає остаточний результат кожного сканування, що відображено в останньому стовпВІДЛІК ЧАСУ/СКАНУВАННЯ КЕШ\r\n 00024А9С 01 00\r\n 00024AEF 01 00\r\n 00024В42 02 00\r\n 00024В96 01 02\r\n У наведеному вище потоці даних часові дані являють собою 32-розрядне число (шістнадцятиричній формат), яке відповідає абсолютному часу з моменту початку вимірювань. Відповідно, зареєстровані дані включають часові інтервали, які минули, між насінинами, які йдуть одна за одною в потоці насінин і можуть бути оброблені з метою обчислення різних особливостей витрати зерен, таких як середня витрата та статистичний розподіл витрати. Роздільна здатність з часом може становити близько 400 мікросекунд, що відповідає частоті сканування датчика зображення близько Показання лічильника 0 0 0 1 2 1 0 Остаточний результат (якщо результат >0, вказати полічене число) Незастосовно 0-0=0; пораховано нуль насінин 0-0=0; пораховано нуль насінин 0-1= -1; пораховано нуль насінин 1-2= -1; пораховано нуль насінин 2-1=1; порахована насінина №2 1-0=1; порахована насінина №1 чику Таблиці 1. При кожному оптичному скануванні процесор 70 віднімає поточне показання лічильника для останнього сканування з показання лічильника для безпосередньо попереднього сканування. Якщо підсумок виражений позитивним числом (>0), його виражають у вигляді порахованих насінин. Як показано в Таблиці 1, ряд сканувань, проілюстрованих на Фіг.7, дає вірний остаточний результат, виражений двома порахованими насінинами. Мікропроцесор 70 системи передає дані підрахунку насінин віддаленому комп'ютеру 80 у потоці даних, який може мати наступний формат: початок нового вимірювання виявлена перша насінина друга насінина дві насінини в одному скануванні ще два набори даних для зчитування. 2500Гц. При цьому відбувається постійне сканування ділянки вимірювань, обмеженої отвором 18, із частотою сканування 2500 разів на секунду. За рахунок високої частоти сканування пристрій 10 здатний ефективно підраховувати насінини або інші частинки, що переміщуються з високою швидкістю. В одному з варіантів здійснення, мікропроцесор 70 надає дані віддаленому комп'ютеру 80, який генерує звіт про вимірювані параметри, включаючи статистичну оцінку даних. Як показано в наведеному вище прикладі, пристрій 10 здатний підраховувати множину час 15 тинок або насінин, які по суті одночасно проходять через отвір 18. Відповідно, пристрій 10 здатний точно підраховувати насінини, які розкидають із висівного пристрою, хоча такий пристрій може принаймні зрідка розкидати відразу по дві або більше з'єднаних одна з одною насінини (так звані "дублі"). Таким чином, пристрій 10 особливо застосовний для вимірювання числа та насипної маси насінин, які висіває пристрій протягом заданого періоду часу. Крім того, пристрій 10 особливо застосовний для оцінки впливу різних видів обробки насінин на точність висівання у звичайних висівних пристроїв. Крім цього, пристрій 10 застосовний для визначення оптимальних апаратних настроювань висівних пристроїв залежно від певних типів насінин і складів для обробки, таких як жорсткість пружини в сівалок з ручним керуванням, рівень вакууму та положення скреперу у вакуумних сівалок, вплив швидкості руху на точність висівання й т.п., що добре відомо з техніки. За рахунок збільшеної оптичної відстані, створюваної протилежними дзеркалами 20, 22, може поліпшуватися здатність пристрою 10 виявляти частинки або насінини, які проходять через отвір 18, незалежно від положення частинок в отворі 18. Даний результат проілюстрований на прикладі компактного оптичного вимірювального пристрою 600, який показаний на Фіг.8а-8в, аналогічного описаному вище вимірювальному пристрою 10, але без дзеркала 20 і дзеркала 22. Як і пристрій 10, пристрій 600 включає отвір 618, який обмежує ділянку вимірювань, джерело 632 світла, лінзу 624, датчик 640 зображення. Лінза 624 встановлена на відстані L2 від центру отвору 618, а датчик 640 зображення встановлений на відстані L1 від лінзи 624. Лінзу 624 і відстані L1 і L2 вибирають таким чином, щоб на датчик 640 зображення проектувалося точно сфокусоване зображення насінини 690, що проходить через центр отвору 618. За рахунок цього по суті відсутня розмитість зображення насінини або частинки 690, коли насінини або частинка 690 проходить по суті через центр отвору 618, як це показано на Фіг.8а. На Фіг.86 показаний випадок, коли насінини або частинка 692 проходить через передню частину отвору 618, яка знаходиться по суті ближче до лінзи 624, ніж центр отвору 618. Оскільки насінини або частинка 692 знаходиться по суті ближче до лінзи, зображення насінини або частинки проектується в точку, яка знаходиться на відстані "а" попереду датчика 640 зображення. У результаті, зображення, яке досягає датчика 640 зображення, є не сфокусованим і має значну розмитість. Аналогічний результат одержують, коли насінини або частинка 694 проходить через задню частину отвору 618, яка знаходиться по суті далі від лінзи 624, ніж центр отвору 618, як це показано на Фіг.8в. У цьому випадку зображення насінини або частинки 694 проектується в точку, яка знаходиться на відстані "b" за датчиком 640 зображення. У результаті, зображення, яке досягає датчика 640 зображення, також є не сфокусованим і має значну розмитість. У випадку достатньої розмитості зображення насінини система, подібна описаному вище пристрою 10, не здатна розпізнати в розмитому зображенні 95069 16 насінину. Якщо виражатися мовою фотографії, пристрій 600 має дуже малу глибину різкості. На Фіг.9а і 9б проілюстрований вплив глибини різкості на якість сприйманого зображення та кінцевий вплив на відповідний аналоговий сигнал, який генерується датчиком 40 зображення. На Фіг.9а показаний результат сканування з використанням компактного оптичного вимірювального пристрою 600, подібного до пристрою, описаного вище та показаного на Фіг.8а-8в. Коли насінина 710 проходить через центр отвору 618, зображення насінини 710 у такому пристрої 600 різко фокусується на датчик 640 зображення, а відповідний потужний імпульс 722 створює аналоговий вихідний сигнал 720 датчика зображення. Однак, коли насінина 712 проходить по суті за центром отвору 618 або насінина 714 проходить по суті поперед центра отвору 618, зображення, які проектуються на датчик 640 зображення, є по суті розмитими. У результаті, відповідні імпульси 724, 726 в аналоговому вихідному сигналі 720 датчика зображення мають відносно невеликі амплітуди, менші, ніж гранична амплітуда А0. Відповідно, несфокусовані насінини 712 та 714 не підраховуються. На відміну від цього, за рахунок збільшеної оптичної відстані між отвором 18 та лінзою 24, створюваної протилежними дзеркалами 20, 22, як це описано вище, запропонований у винаході пристрій 10 здатний точно підраховувати частинки або насінини незалежно від положень частинок або насінин у широкому отворі 18. Збільшена оптична відстань забезпечує в основному різке зображення частинки або насінин, яке проектується на датчик 40 зображення лінзою 24 незалежно від положення частинки або насінин в отворі. Іншими словами, дзеркала 20, 22 у сполученні забезпечують збільшену глибину різкості, за рахунок чого зображення об'єктів, розташованих у будь-якім положенні в отворі 18, проектуються на датчик 40 зображення у вигляді в основному різких зображень. Як показано на Фіг.9б, незалежно від того, чи проходить насінина 810 через центр отвору 18, через задню частину отвору 18 або через передню частину отвору 18, одержуваний аналоговий вихідний сигнал 820 включає відповідні потужні імпульси 822, 824, 826, амплітуда кожного з яких перевершує граничну амплітуду А0. Іншими словами, за рахунок по суті відсутності розмитості в зображенні трьох насінин, амплітуди всіх трьох імпульсів, які генеруються датчиком 40 зображення, є однаково великою. Відповідно, пристрій 10 здатний точно порахувати всі насінини 810, 812, 814. Таким чином, хоча пристрій 10 має невелику довжину, а оптичні пристрої 24 системи є стаціонарними і нерегульованими, пристрій 10 розрахований на значні зміни відстані між відображуваними об'єктами та лінзою 24 з незначним впливом або без впливу на точність підрахунку. Наприклад, в описаному вище варіанті здійснення пристрою 10 відстань від насінин до лінзи 24 може змінюватися в межах +29мм без негативного впливу на здатність пристрою виявляти насінини в міру їх проходження через отвір 18. Іншими словами, при середньому діаметрі насінин близько 1мм пристрій 10 розрахований на загальну зміну відстані, що до 60 разів 17 перевищує діаметр насінин. Відповідно, пристрій 10 здатний точно підраховувати насінини в потоці насінин, ширина та глибина якого приблизно до 60 разів перевершують середній діаметр насінин. Компактний підрахунковий пристрій 10, подібний описаному вище, здатен з високою точністю підраховувати насінини або частинки в диспергованому потоці насінин або частинок. Наприклад, передбачається, що такий пристрій 10 має точність підрахунку принаймні близько 99%, аж до близько 99,9%. Оскільки пристрій 10 розрахований на частинки, які поширені по потоці, не потрібно звужувати диспергований потік перед тим, як частинки надійдуть у пристрій. Наприклад, якщо пристрій 10 використовують для вимірювання витрати висівання звичайного висівного пристрою, вихідний із пристрою потік може подаватися безпосередньо через отвір 18 без попереднього звуження або іншого обмеження потоку насінин, який виходить із висівного пристрою. Як показано на Фіг.10, у винаході також пропонується представлений на блок-схемі 800 спосіб вимірювання характеристики потоку диспергованих насінин, глибина якого по суті перевищує розмір насінин. Спосіб включає стадію 810, на якій потік насінин пропускають через ділянку вимірювань, яка має достатню глибину. Переважно глибина ділянці вимірювань дорівнює або більше глибини потоку та може приблизно до 58 разів перевищувати діаметр насінин. Спосіб на блоксхемі 800 додатково включає стадію 820, на якій одержують в основному різке зображення по суті кожної насінини з потоку насінин у міру їх проходження через ділянку вимірювань, незалежно від положення насінин в ділянці вимірювань. Відповідно, одержують в основному різке зображення по 95069 18 суті кожної насінини з потоку незалежно від того, чи знаходиться насінина у центрі потоку або уздовж або поблизу заднього або переднього країв потоку. Нарешті, на стадії 830 аналізують одержані зображення насінин, щоб визначити принаймні одну характеристику потоку насінин. Визначуваною характеристикою може бути, наприклад, кількість насінин у потоці або часовий інтервал або відстань між частками в потоці насінин, що йдуть одна за одною. Якщо потік насінин включає насінини і/або інші об'єкти принаймні двох різних розмірів, визначуваною характеристикою може бути, наприклад, число насінин або об'єктів, розмір яких перевищує певний розмір. За допомогою системи 10 і представленого на блок-схемі 800 способу можна вимірювати потоки частинок, діаметр яких дорівнює або більше приблизно 1мм. Відповідно, ці пристрій та спосіб застосовні для підрахунку та вимірювання витрати дрібних насінин, таких як насінин каноли, або більших насінин, таких як зерна кукурудзи або маїсу. У розглянутих вище різних варіантах здійснення винаходу описані та проілюстровані різні особливості винаходу без обмеження його обсягу. Спеціалістам у даній галузі техніки буде зрозуміло, що в описані варіанти здійснення можуть бути внесені різні зміни та удосконалення, які не виходять за межі суті та обсягу винаходу. Наприклад, незважаючи на те, що застосування пристрою та способу описано для визначення характеристик насінин, що рухаються, пристрій також може використовуватися для вимірювання потоків інших об'єктів або частинок. Мається на увазі, що всі такі зміни та удосконалення знаходяться у межах обсягу домагань прикладеної формули винаходу. 19 95069 20 21 95069 22 23 95069 24 25 95069 26 27 Комп’ютерна верстка Н. Лиcенко 95069 Підписне 28 Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice and count method and cost measurement of seeds
Автори англійськоюLeuenberger Jacob Andreas, Roggly Marcus
Назва патенту російськоюУстройство и способ подсчета и измерения затрат семян
Автори російськоюЛойенбергер Якоб Андреас, Роггли Маркус
МПК / Мітки
МПК: G06M 1/00
Мітки: насінин, витрати, підрахунку, спосіб, вимірювання, пристрій
Код посилання
<a href="https://ua.patents.su/14-95069-pristrijj-ta-sposib-pidrakhunku-ta-vimiryuvannya-vitrati-nasinin.html" target="_blank" rel="follow" title="База патентів України">Пристрій та спосіб підрахунку та вимірювання витрати насінин</a>
Спосіб сепарування насінин та пристрій для його реалізації
Номер патенту: 71704
Опубліковано: 15.12.2004
Автори: Єрмак Петро Олексійович, Коваль Віктор Якович, Єрмак Василь Петрович
МПК: B07B 4/00
Мітки: пристрій, спосіб, насінин, сепарування, реалізації
Формула / Реферат:
1. Спосіб сепарування насінин, при якому поперечний повітряний потік відносить насінини на відстані, пропорційні питомій вазі, який відрізняється тим, що з метою збільшення якості поділу перед потраплянням у цей потік, насінини сковзають по встановленій під кутом до лінії горизонту сітці, на поверхні якої, за рахунок всмоктування з під неї повітря, утворюється повітряний потік зі швидкістю, меншою чи рівною швидкості утримання від сковзання...
Спосіб сепарування насінин та пристрій для його реалізації (варіанти)
Номер патенту: 34040
Опубліковано: 15.08.2003
Автор: Ермак Василь Петрович
Мітки: сепарування, варіанти, реалізації, спосіб, пристрій, насінин
Формула / Реферат:
1. Спосіб сепарування насінин, за яким насінини подають живильником із бункера у поперечний повітряний потік, який відносить їх на відстані, пропорційні питомій вазі, який відрізняється тим, що назустріч падаючим із живильника насінинам, перед їх потраплянням у поперечний потік, подають додатковий повітряний потік зі швидкістю меншою чи рівною критичній (вітання) для найлегших за питомою вагою з сепарованих насінин.2. Пристрій для...
Пристрій для дослідження насінин на стиск
Номер патенту: 51885
Опубліковано: 10.08.2010
Автори: Шевчук Віктор Володимирович, Шевчук Роман Степанович
МПК: B02B 3/02
Мітки: дослідження, насінин, стиск, пристрій
Формула / Реферат:
Пристрій для дослідження насінин на стиск, що містить робочий стіл із стійкою, на якій закріплена вимірювальна частина мікрометра, та встановлений на робочому столі вимірювач сили стиску, який відрізняється тим, що вимірювач сили стиску виконаний у вигляді консольної динамометричної балки з регульованим вильотом консолі й індикатора прогину балки, а також додатково оснащений притискною пластиною, на одному кінці якої змонтований голчастий...
Спосіб визначення координат насінин, що пролітають в потоці
Номер патенту: 35162
Опубліковано: 10.09.2008
Автори: Пархоменко Юрій Михайлович, Лушников Вячеслав Михайлович, Пархоменко Михайло Давидович, Златопольський Федір Йосипович, Каптьолова Тетяна Миколаївна
Мітки: пролітають, координат, потоці, визначення, насінин, спосіб
Формула / Реферат:
Спосіб визначення координат насінин, що пролітають в потоці, що включає використання пристрою реєстрації, який включає формування зон затемнення на фотоприймачах від насінин, що пролітають при включенні імпульсного джерела світла, який відрізняється тим, що при включенні кожного джерела імпульсного світла визначають координати початку і кінця зон затемнення від насінин, що пролітають на трьох лінійках прямокутника, виключаючи лінійку з...
Спосіб та пристрій для вимірювання витрати текучого середовища
Номер патенту: 49022
Опубліковано: 16.09.2002
Автор: Базен Ален
Мітки: середовища, вимірювання, пристрій, текучого, спосіб, витрати
Формула / Реферат:
1. Спосіб вимірювання витрати текучого середовища, що полягає у послідовному розповсюдженні двох ультразвукових сигналів у протилежних напрямках між двома ультразвуковими приймально-випромінювальними перетворювачами, що знаходяться на певній відстані один від одного у напрямку потоку середовища, причому кожний перетворювач приймає відповідний ультразвуковий сигнал SIG1, SIG2, який відрізняється тим, що він включає:- формування n...
Попередній патент: Антиген-зв’язуюча молекула, яка зв’язує еgfr, вектор, що її кодує, та їх застосування
Наступний патент: Конструкція передньої частини судна витискувального типу
Випадковий патент: Опорний вузол