Спосіб безперервної аеропросторової ретрансляції пошуково-рятувальної інформації в умовах ліквідації наслідків надзвичайної ситуації
Номер патенту: 110683
Опубліковано: 25.01.2016
Автори: АНДРІЄВСЬКИЙ АНДРІЙ ПЕТРОВИЧ, Тачиніна Олена Миколаївна, Романченко Ігор Сергійович, Валуйський Станіслав Вікторович, Семенченко Андрій Іванович, Новіков Валерій Іванович, Чумаченко Сергій Миколайович, Лисенко Олександр Іванович, Хазанович Олександр Ізраільович, Чеканова Ірина Віталіївна, Данилюк Сергій Леонідович, Туровець Юлія Станіславівна, Нікулін Олександр Федорович, Прищепа Тетяна Олексіївна
Формула / Реферат
1. Спосіб безперервної аеропросторової ретрансляції пошуково-рятувальної інформації в умовах ліквідації наслідків надзвичайної ситуації, за яким у повітря піднімають безпілотну ретрансляційну аероплатформу, утворюють на земній поверхні зону радіопокриття фіксованого радіуса, ретранслюють сигнали, забезпечують зв'язок між мобільними абонентами радіомережі, в центрі управління збирають дані про поточне розміщення мобільних абонентів, тип, інтенсивність та розподілення трафіку мобільних абонентів, відбирають варіанти зв'язності мережі та оперативно визначають оптимальне розміщення безпілотної ретрансляційної аероплатформи, піднімають в повітря інші безпілотні ретрансляційні аероплатформи та розміщують їх в зонах ретрансляції сигналів, розподіляють трафік між абонентами бездротової епізодичної мережі, який відрізняється тим, перед застосуванням безпілотні ретрансляційні аероплатформи оснащують квазіадаптивною-квазіоптимальною системою управління польотом з модулем корегування траєкторії польоту, а систему живлення двигунів внутрішнього згорання оснащують активаторами палива, підключають їх до квазіадаптивних-квазіоптимальних систем автоматичного управління, у повітря піднімають безпілотні ретрансляційні аероплатформи почергово, замінюючи одну іншою з умовою непереривання зв'язку, за сигналами мобільних телефонів модулем корегування траєкторії польоту відслідковують райони розміщення рятувальників або потерпілих, під час польоту кожного із безпілотних літальних апаратів квазіадаптивною-квазіоптимальною системою управління визначають найкраще просторове положення кожного із безпілотних ретрансляційних аероплатформ, які баражують в зонах ретрансляції сигналів за енергозберігаючою траєкторією у вигляді двох лінійних ділянок і двох розворотів із почерговим зниженням і набором висоти в умовах дій інтенсивних зовнішніх збурень над районами надзвичайної ситуації, районами перебування та маршрутами руху рятувальників та потерпілих, під час баражування охоплюють зони ретрансляції сигналів та безперервно збирають інформацію про небезпечні та безпечні координати та райони розміщення потерпілих, обчислюють варіанти підтримки зв'язності мережі зв'язку залежно від рельєфу місцевості, положення рятувальників та потерпілих, квазіадаптивною-квазіоптимальною системою управління моделюють імовірність ураження рятувальників та потерпілих агресивними чинниками надзвичайної ситуації та імовірність виконання завдання, та оперативно визначають координати перебування рятувальників та потерпілих та оптимальне розміщення будь-якої чергової безпілотної ретрансляційної аероплатформи над координатами та районами дій рятувальників та перебування потерпілих, маршрути безпечного переміщення рятувальників та потерпілих і на основі цього прогнозують необхідну тривалість часу підтримки структурної зв'язності інформаційної системи рятувальників, через безпілотну ретрансляційну аероплатформу по засобах бездротової епізодичної радіомережі безперервно ретранслюють координати рятувальників та інформацію у аеропросторі до центру управління, через безпілотну ретрансляційну аероплатформу від центру управління до рятувальників ретранслюють інформацію про гідрометеорологічну та екологічну обстановку та координують дії рятувальників щодо місця і часу їх безпечного розташування у будь-якому районі, маршрути, відстані і час їх пересування.
2. Спосіб за п. 1, який відрізняється тим, що баражування за енергозберігаючими траєкторіями, забезпечення сталого зв'язку, ретрансляція пошуково-рятувальної інформації та прогнозування дій рятувальників здійснюються одночасно.
Текст
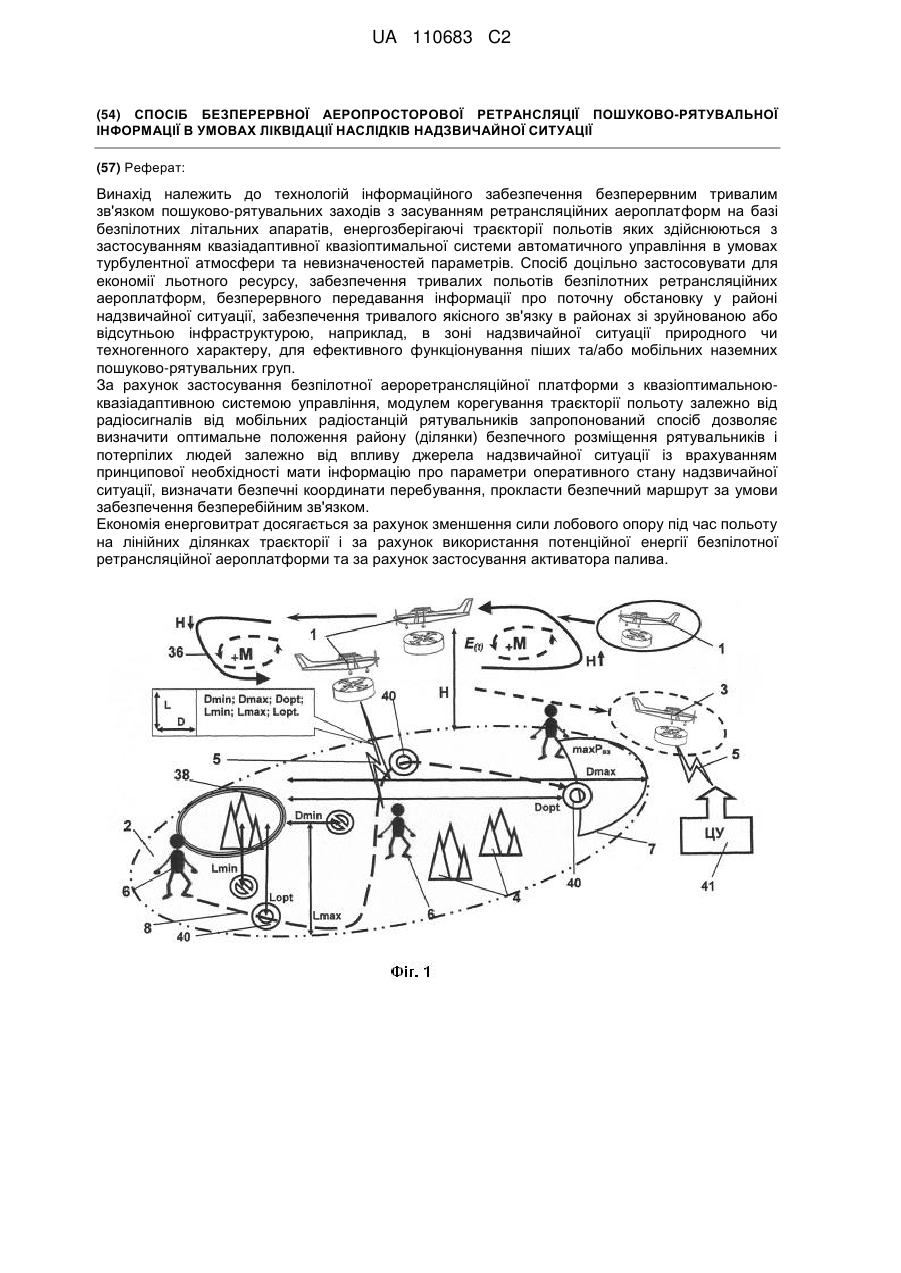
Реферат: Винахід належить до технологій інформаційного забезпечення безперервним тривалим зв'язком пошуково-рятувальних заходів з засуванням ретрансляційних аероплатформ на базі безпілотних літальних апаратів, енергозберігаючі траєкторії польотів яких здійснюються з застосуванням квазіадаптивної квазіоптимальної системи автоматичного управління в умовах турбулентної атмосфери та невизначеностей параметрів. Спосіб доцільно застосовувати для економії льотного ресурсу, забезпечення тривалих польотів безпілотних ретрансляційних аероплатформ, безперервного передавання інформації про поточну обстановку у районі надзвичайної ситуації, забезпечення тривалого якісного зв'язку в районах зі зруйнованою або відсутньою інфраструктурою, наприклад, в зоні надзвичайної ситуації природного чи техногенного характеру, для ефективного функціонування піших та/або мобільних наземних пошуково-рятувальних груп. За рахунок застосування безпілотної аероретрансляційної платформи з квазіоптимальноюквазіадаптивною системою управління, модулем корегування траєкторії польоту залежно від радіосигналів від мобільних радіостанцій рятувальників запропонований спосіб дозволяє визначити оптимальне положення району (ділянки) безпечного розміщення рятувальників і потерпілих людей залежно від впливу джерела надзвичайної ситуації із врахуванням принципової необхідності мати інформацію про параметри оперативного стану надзвичайної ситуації, визначати безпечні координати перебування, прокласти безпечний маршрут за умови забезпечення безперебійним зв'язком. Економія енерговитрат досягається за рахунок зменшення сили лобового опору під час польоту на лінійних ділянках траєкторії і за рахунок використання потенційної енергії безпілотної ретрансляційної аероплатформи та за рахунок застосування активатора палива. UA 110683 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до технологій інформаційного забезпечення безперервним тривалим зв'язком пошуково-рятувальних заходів з засуванням ретрансляційних аероплатформ на базі безпілотних літальних апаратів, енергозберігаючі траєкторії польотів яких здійснюються з застосуванням квазіадаптивної квазіоптимальної системи автоматичного управління в умовах турбулентної атмосфери та невизначеностей параметрів. Спосіб доцільно застосовувати для економії льотного ресурсу (ресурсів) ретрансляційних аероплатформ на базі безпілотних літальних апаратів, безперервного передавання інформації про поточну обстановку у районі надзвичайної ситуації, забезпечення тривалого якісного зв'язку в районах зі зруйнованою або відсутньою інфраструктурою, наприклад, в зоні надзвичайної ситуації природного чи техногенного характеру, для ефективного функціонування піших та/або мобільних наземних пошуково-рятувальних груп. Відомий спосіб управління топологією мобільної епізодичної радіомережі, за яким збирають інформацію про стан та параметри функціонування мережі або її зони, застосовують один з відомих методів маршрутизації, розраховують та оцінюють характеристики функціонування мережі, находять нову топологію мережі у випадку відхилення параметрів функціонування від допустимих значень, реалізують певну ціль управління вузла, доводять до вузлів прийняте рішення, змінюють потужність передачі або направленість антени терміналу мобільного абонента [Миночкин А.И. Управление топологией мобильной радиосети /А.И. Миночкин, В.А. Романюк //Зв'язок. - 2003. - № 2. - С. 28-33, рис. 1.]. Одним із способів, як за суттю, так і за завданнями, що вирішуються, який вибраний за аналог є спосіб визначення безпечного району розміщення та маршрутів пересування рятувальників в умовах ліквідації наслідків екологічного лиха, за яким в повітря піднімають безпілотний літальний апарат, утворюють на земній поверхні зону радіопокриття, ретранслюють сигнали, забезпечують епізодичний зв'язок між рятувальниками або рятувальними загонами у радіомережі, збирають дані про поточне розміщення мобільних абонентів у центрі управління, будують мінімальне кістякове дерево графу мережі та визначають ступені структурної зв'язності епізодичної радіомережі, визначають координати початкового розміщення одного безпілотного літального апарата, розміщують безпілотний літальний апарат в одній з випадково генерованих точок простору або в центрі мас наземних вузлів мережі, визначають координати остаточного розміщення одного безпілотного літального апарату методом градієнтного спуску [Han Z. Optimization of MANET connectivity via smart deployment/movement of unmanned air vehicles /Z. Han, A.L. Swindlehurst, K.J. R. Liu //IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY. 2009. - Vol. 58. - №7. - P. 3533-3546, табл. 1]. Недоліком способу є те, що спосіб не забезпечує зв'язність потрібної кількості мобільних абонентів (пошуково-рятувальних груп або окремих рятувальників). Спосіб забезпечує лише створення зони радіопокриття певної кількості мобільних абонентів, але не забезпечує задані функціональні показники передачі даних в мережі. Спосіб дозволяє оцінювати наявність структурної зв'язності мобільних абонентів, але не дозволяє прогнозувати її тривалість. При великій кількості абонентів в мережі спосіб не дозволяє вирішувати задачу управління положенням безпілотного літального апарату в режимі реального часу. Спосіб не забезпечує стабілізацію безпілотного літального апарата на траєкторіях баражування та визначення безпечного району розміщення та маршрутів пересування рятувальників в умовах ліквідації наслідків екологічного лиха. Найбільш близьким способом за суттю і за завданнями, що розв'язуються, який вибраний за найближчий аналог (прототип), є спосіб забезпечення високої пропускної здатності епізодичної радіомережі, за яким в повітря піднімають один безпілотний літальний апарат, утворюють на земній поверхні зону радіопокриття фіксованого радіуса, ретранслюють сигнали, забезпечують епізодичний зв'язок між мобільними абонентами радіомережі, збирають дані про поточне розміщення мобільних абонентів в центрі управління, будують мінімальне кістякове дерево графа мережі та визначають ступені структурної зв'язності епізодичної радіомережі, визначають координати початкового розміщення одного безпілотного літального апарата, розміщують один безпілотний літальний апарат в одній з випадково генерованих точок простору або в центрі мас наземних вузлів мережі, визначають координати остаточного розміщення одного безпілотного літального апарата методом градієнтного спуску, в центрі управління збирають інформацію про тип, інтенсивність та розподілення трафіку мобільних абонентів, моделюють переміщення рятувальників під час виконання пошуково-рятувальних робіт та на основі цього прогнозують тривалість структурної зв'язності мобільних абонентів мережі, враховують протоколи множинного доступу, маршрутизації потоків та обслуговування повідомлень в вузлах мережі, оцінюють показники функціонування мережі, відбирають варіанти зв'язності мережі та оперативно визначають оптимальне розміщення множини безпілотних літальних апаратів, 1 UA 110683 C2 5 10 15 20 25 30 35 40 45 50 55 60 залежно від одержаної інформації підіймають в повітря додаткові безпілотні літальні апарати та розміщують їх в зонах ретрансляції сигналів, розподіляють трафік між абонентами бездротової епізодичної мережі з високою пропускною здатністю. [Патент України 106939. "Спосіб забезпечення високої пропускної здатності епізодичної радіомережі". Заявка а 201308530. МПК (2013.01): H04W 8/02 (2009.01), H04W 8/08 (2009.01), H04W 16/02 (2009.01), H04W 16/10 (2009.01), H04W 28/08 (2009.01), H04W 84/00. Винахідники/власники: Романченко Ігор Сергійович, Данилюк Сергій Леонідович, Семенченко Андрій Іванович, Лисенко Олександр Іванович, Чумаченко Сергій Миколайович, Валуйський Станіслав Вікторович, Кірчу Павло Іванович. Опублік. 27.10.2014, бюл. Держ. служби, інтел. власн. України № 20.] Недоліками відомого способу є те, що для реалізації способу необхідно змінити потужність передачі та направленість сигналів зв'язності, що не забезпечує енергоефективність та простоту зв'язності мобільних абонентів. Спосіб забезпечує зв'язність локальної групи абонентів, але не забезпечує зв'язність розосереджених груп мобільних абонентів. Спосіб не забезпечує розв'язання завдань великої розмірності та відслідковування дій наземних або повітряних абонентів у будь-яких умовах їх перебування. В основу винаходу поставлені задачі за рахунок оснащення безпілотних ретрансляційних аероплатформ додатковим технологічним обладнанням, змінювання чинних та здійснення нових додаткових технологічних операцій забезпечити тривалі почергові польоти кожного із безпілотних ретрансляційних аероплатформ по черзі за енергозберігаючими траєкторіями баражування, що складаються з двох лінійних ділянок і двох розворотів в зонах ретрансляції сигналів із почерговим зниженням і набором висоти, завдяки енгергозберігаючому автоматичному управлінню положенням кожного із безпілотних ретрансляційних аероплатформ навколо центру мас в умовах дії інтенсивних зовнішніх збурень), збільшити тривалість польоту кожної із безпілотних ретрансляційних аероплатформ та забезпечити абонентів пошуковорятувальних груп тривалим безперервним радіозв'язком під час баражування. Крім того, за рахунок здійснення тривалих почергових польотів та за рахунок функціонування додатково встановленого обладнання збирати інформацію про небезпечні та безпечні райони, інтенсивність радіозв'язку, місце положення рятувальників (пошуково-рятувальних загонів) та потерпілих та забезпечити автоматичне оцінювання показників функціонування мережі бездротового зв'язку, вибирати варіанти забезпечення належної зв'язності мережі залежно від положення рятувальників (рятувальних загонів) та оперативного визначення часу піднімання у повітря кожної із наступних безпілотних ретрансляційних аероплатформ, оптимального їх розміщення у повітрі над районами екологічного лиха, де діють рятувальники (пошуковорятувальні загони), автоматично розподіляти трафік зв'язку між рятувальниками (пошуковорятувальними загонами) у бездротовій епізодичній мережі з високою пропускною здатністю, забезпечити прокладання маршрутів безпечного переміщення рятувальників під час виконання пошуково-рятувальних робіт, забезпечити тривалу безперервну ретрансляцію сигналів зв'язку та пошуково-рятувальної інформації між рятувальниками та центром управління, забезпечити автоматичне своєчасне передавання інформації рятувальникам про гідрометеорологічну та екологічну обстановку та координування дій рятувальників щодо місця і часу їх безпечного розташування у будь-якому районі, маршруті, відстані і часу їх пересування. Поставлена задача розв'язується тим, що у способі безперервної аеропросторової ретрансляції пошуково-рятувальної інформації в умовах ліквідації наслідків надзвичайної ситуації, за яким у повітря піднімають безпілотну ретрансляційну аероплатформу, утворюють на земній поверхні зону радіопокриття фіксованого радіуса, ретранслюють сигнали, забезпечують зв'язок між мобільними абонентами радіомережі, в центрі управління збирають дані про поточне розміщення мобільних абонентів, тип, інтенсивність та розподілення трафіку мобільних абонентів, відбирають варіанти зв'язності мережі та оперативно визначають оптимальне розміщення безпілотної ретрансляційної аероплатформи, піднімають в повітря інші безпілотні ретрансляційні аероплатформи та розміщують їх в зонах ретрансляції сигналів, розподіляють трафік між абонентами бездротової епізодичної мережі, згідно з винаходом, перед застосуванням безпілотні ретрансляційні аероплатформи оснащують квазіадаптивноюквазіоптимальною системою управління польотом з модулем корегування траєкторії польоту, а систему живлення двигунів внутрішнього згорання оснащують активаторами палива, підключають їх до квазіадаптивних-квазіоптимальних систем автоматичного управління, у повітря піднімають безпілотні ретрансляційні аероплатформи почергово, замінюючи одну іншою з умовою непереривання зв'язку, за сигналами мобільних телефонів модулем корегування траєкторії польоту відслідковують райони розміщення рятувальників або потерпілих, під час польоту кожного із безпілотних літальних апаратів квазіадаптивною-квазіоптимальною системою управління визначають найкраще просторове положення кожного із безпілотних 2 UA 110683 C2 5 10 15 20 25 30 35 40 45 50 55 60 ретрансляційних аероплатформ, які баражують в зонах ретрансляції сигналів за енергозберігаючою траєкторією у вигляді двох лінійних ділянок і двох розворотів із почерговим зниженням і набором висоти в умовах дій інтенсивних зовнішніх збурень над районами надзвичайної ситуації, районами перебування та маршрутами руху рятувальників та потерпілих, під час баражування охоплюють зони ретрансляції сигналів та безперервно збирають інформацію про небезпечні та безпечні координати та райони розміщення потерпілих, обчислюють варіанти підтримки зв'язності мережі зв'язку залежно від рельєфу місцевості, положення рятувальників та потерпілих, квазіадаптивною-квазіоптимальною системою управління моделюють імовірність ураження рятувальників та потерпілих агресивними чинниками надзвичайної ситуації та імовірність виконання завдання, та оперативно визначають координати перебування рятувальників та потерпілих та оптимальне розміщення будь-якої чергової безпілотної ретрансляційної аероплатформи над координатами та районами дій рятувальників та перебування потерпілих, маршрути безпечного переміщення рятувальників та потерпілих і на основі цього прогнозують необхідну тривалість часу підтримки структурної зв'язності інформаційної системи рятувальників, через безпілотну ретрансляційну аероплатформу по засобах бездротової епізодичної радіомережі безперервно ретранслюють координати рятувальників та інформацію у аеропросторі до центру управління, через безпілотну ретрансляційну аероплатформу від центру управління до рятувальників ретранслюють інформацію про гідрометеорологічну та екологічну обстановку та координують дії рятувальників щодо місця і часу їх безпечного розташування у будь-якому районі, маршрути, відстані і час їх пересування. Баражування за енергозберігаючими траєкторіями, забезпечення сталого зв'язку, ретрансляція пошуково-рятувальної інформації. Безпілотні ретрансляційні аероплатформи - є безпілотні ретрансляційні аероплатформи на базі безпілотних літальних апаратів, які оснащені квазіадаптивною-квазіоптимальною системою управління польотом з модулем корегування траєкторії польоту і активатором палива. Виконання їх польотів на оптимальних оперативно обрахованих траєкторіях баражування в умовах дії інтенсивних зовнішніх збурень дозволяє знизити енерговитрати польоту. Автоматичні системи управління безпілотних ретрансляційних аероплатформ в агресивних умовах та в умовах впливу негативних природних чинників і дозволяють забезпечити стабілізацію польоту кожної із безпілотних ретрансляційних аероплатформ на траєкторіях баражування за рахунок коректного обчислення параметрів польоту та зменшення часу адаптації системи до дії збурень та зменшення середнього значення помилки стабілізації координат руху безпілотних ретрансляційних аероплатформ за весь час стабілізаційного процесу і внаслідок чого зменшити енергозатрати в процесі управління польотом. Кваізадаптивною-квазіоптимальною системою оперативно синтезується алгоритм стабілізації польоту безпілотних ретрансляційних аероплатформ на енергозберігаючій траєкторії в умовах дії інтенсивних зовнішніх збурень. Під час польоту кожної із безпілотних ретрансляційних аероплатформ автоматично визначається найкраще просторове положення характерної точки, навколо якої баражують за енергозберігаючою траєкторію у вигляді двох лінійних ділянок і двох розворотів із почерговим зниженням і набором висоти, що забезпечує зниження енергетичних витрат в умовах дії інтенсивних зовнішніх збурень. Суттєвою особливістю способу є функціонально пов'язане сумісне застосування у безпілотній ретрансляційній аероплатформі квазіадаптивної-квазіоптимальної системи автоматичного управління польотом, модуля корегування траєкторії польоту і активатора палива. Паливо, яке перетворює активатор палива із вихідного, має високу енергетику згорання і, тому, під час польоту витрачається менша його кількість порівняно із експлуатаційною. Використання активованого палива під час експлуатації двигунів внутрішнього згорання безпілотних літальних апаратів забезпечує економію палива під час польотів до 10 % від експлуатаційної норми. Таким чином, застосування активаторів палива та підключення їх до квазіадаптивнихквазіоптимальних систем автоматичного управління забезпечує автономне активування палива та додаткове зниження енерговитрат під час польоту на всій траєкторії баражування, що складається з двох лінійних ділянок і двох розворотів навколо характерної точки із почерговим зниженням і набором висоти. Це забезпечує більшу тривалість польотів в умовах інтенсивних зовнішніх і параметричних збурень. Почергове піднімання безпілотних ретрансляційних аероплатформ у повітря, заміна їх один іншим забезпечує надійне безперервне функціонування епізодичної (ситуаційної) радіомережі для відслідковування районів розміщення рятувальників або потерпілих за сигналами 3 UA 110683 C2 5 10 15 20 25 30 35 40 45 50 55 60 мобільних телефонів, безперервне збирання інформації про небезпечні та безпечні райони розміщення людей, параметри радіозв'язку, істинне місце знаходження потерпілих та рятувальників та безперервне ретранслювання інформації у аеропросторі до центру управління, передавання сигнальної, голосової та мультимедійної інформації в умовах існування природних та штучних завад і перешкод. Під час польоту кожної із безпілотних ретрансляційних аероплатформ квазіадаптивноюквазіоптимальною системою управління забезпечується визначення найкращого просторового положення кожної із безпілотних ретрансляційних аероплатформ, які баражують навколохарактерної точки за енергозберігаючою траєкторію у вигляді двох лінійних ділянок і двох розворотів із почерговим зниженням і набором висоти в умовах дій інтенсивних зовнішніх збурень над районами надзвичайної ситуації та районами розміщення рятувальників та потерпілих. Безперервне збирання інформації про небезпечні та безпечні райони розміщення людей, обчислення варіантів підтримки зв'язності мережі зв'язку залежно від рельєфу місцевості, положення рятувальників та потерпілих забезпечує квазіадаптивна-квазіоптимальна система управління під час баражування. Також квазіадаптивна-квазіоптимальна система управління забезпечує моделювання імовірності ураження рятувальників та потерпілих агресивними чинниками надзвичайної ситуації та імовірність виконання завдання, та забезпечує оперативне визначення координат перебування рятувальників та потерпілих та оптимальне розміщення будь-якої чергової безпілотної ретрансляційної аероплатформи над районами дій рятувальників та перебування потерпілих, маршрути безпечного переміщення рятувальників та потерпілих під час виконання пошуково-рятувальних робіт. Моделювання маршрутів безпечного переміщення рятувальників (пошуково-рятувальних груп) під час виконання ними пошуково-рятувальних робіт у центрі управління і на основі цього надає можливість прогнозувати тривалість структурної зв'язності рятувальників, прогнозувати імовірність ураження рятувальників (пошуково-рятувальних груп) агресивними чинниками надзвичайної ситуації та імовірність виконання завдань. Засоби бездротової епізодичної радіомережі, якими користуються абоненти бездротової епізодичної мережі, забезпечують безперервне ретранслювання координат рятувальників та інформацію у аеропросторі до центру управління. Збирання інформації в центрі управління про тип, інтенсивність та розподілення трафіку між рятувальниками (пошуково-рятувальними групами, мобільними абонентами) надає можливість накопичити потрібні вихідні дані для розрахунку параметрів функціонування мережі. На основі таких розрахунків та моделювання центр управління оцінює показники функціонування мережі зв'язку, прогнозує необхідну тривалість часу підтримки структурної зв'язності інформаційної системи рятувальників, обчислює варіанти підтримки зв'язності мережі зв'язку залежно від рельєфу місцевості, положення рятувальників та оперативно визначає оптимальне розміщення будь-якої чергової безпілотної ретрансляційної аероплатформи над районом дій рятувальників (пошуково-рятувальних груп). Через безпілотну ретрансляційну аероплатформу від центру управління до рятувальників ретранслюється інформація про гідрометеорологічну та екологічну обстановку та координуються дії рятувальників щодо місця і часу їх безпечного розташування у будь-якому районі, маршруті, відстані і часу їх пересування. Оцінювання показників функціонування мережі, вибір варіантів зв'язності мережі залежно від рельєфу місцевості дозволяє своєчасно визначити оптимальне положення рятувальників (пошуково-рятувальних груп) та оперативно визначити оптимальне розміщення будь-якої безпілотної ретрансляційної аероплатформи над районом дій рятувальників. Модуль корегування траєкторії польоту за сигналами мобільних телефонів забезпечує формування сигналів корегування польотом залежно від координат та районів розміщення рятувальників або потерпілих людей, передавання цих сигналів у квазіадаптивнуквазіоптимальну систему управління. Внаслідок виконання технологічних операцій зменшується енерговитрати під час польоту; збільшується тривалість польоту безпілотного літального апарату над районом надзвичайної ситуації, де діють рятувальники (пошуково-рятувальні загони). За рахунок зниження енерговитрат під час польоту збільшується тривалість польоту і, тим самим, забезпечується більша тривалість зв'язку у районі надзвичайної ситуації, де діють рятувальники (пошуковорятувальні загони). За рахунок своєчасного піднімання у повітря чергової безпілотної ретрансляційної аероплатформи досягається: безперервність радіозв'язку між рятувальниками (пошуково-рятувальними загонами) у разі їх швидкого та непередбачуваного переміщення або виникнення непередбачених ситуацій; своєчасне та стійке передавання сигнальної, голосової та мультимедійної інформації рятувальникам (пошуково-рятувальним загонам) про 4 UA 110683 C2 5 10 15 20 25 30 35 40 45 50 55 60 гідрометеорологічну та екологічну обстановку по засобам бездротової епізодичної радіомережі до рятувальників (пошуково-рятувальних груп); координування дій рятувальників (пошуковорятувальних загонів) щодо маршрутів їх пересування та місця і часу їх безпечного розташування в умовах негативного техногенного та природного впливу. Здійснення технологічних операцій дозволяє виконати оперативну обробку поточної інформації про гідрометеорологічну та екологічну обстановку та своєчасну її ретрансляцію через чергову ретрансляційну аероплатформу на базі безпілотного літального апарату, яка перебуває над районом надзвичайної ситуації, по засобам бездротової епізодичної радіомережі до рятувальників (пошуково-рятувальних груп). Висока пропускна здатність епізодичної радіомережі забезпечується формуванням на земній поверхні та у повітряному просторі зон радіо покриття фіксованого радіусу та ретранслюванням сигналів. Своєчасне передавання пошуково-рятувальної інформації рятувальникам (пошуковорятувальним групам) через чергову ретрансляційну аероплатформу на базі будь-якого із безпілотних літальних апаратів по засобам бездротової епізодичної радіомережі надає можливість уникнути їх ураження агресивними чинниками надзвичайної ситуації та підвищити значення імовірності виконання ними завдань. Одночасна тривалість баражування за енергозберігаючими траєкторіями, забезпечення сталого зв'язку та прогнозування дій рятувальників забезпечують оперативне реагування на будь-які зміни обстановки під час ліквідації наслідків надзвичайної ситуації. Суть способу безперервної аеропросторової ретрансляції пошуково-рятувальної інформації в умовах ліквідації наслідків надзвичайної ситуації пояснюється ілюстраціями, де на фіг. 1 показано траєкторії баражування безпілотної ретрансляційної аероплатформи під час їх чергування над районом надзвичайної ситуації, порядок передавання функцій одної безпілотної ретрансляційної аероплатформи іншій - черговій над районом надзвичайної ситуації, забезпечення безперервним зв'язком рятувальників (пошуково-рятувальних груп) в умовах ліквідації наслідків надзвичайної ситуації, а також райони безпечного розміщення та маршрути пересування рятувальників (пошуково-рятувальних груп), а на фіг. 2 показана квазіадаптивнаквазіоптимальна система управління енергозберігаючим польотом будь-якої із безпілотних ретрансляційних аероплатформ, яка забезпечує безперервну аеропросторову ретрансляцію пошуково-рятувальної інформації під час тривалих польотів на оптимальних енергозберігаючих траєкторіях в умовах ліквідації наслідків надзвичайної ситуації. Винахід полягає у здійсненні технологічних операцій щодо оснащення ретрансляційних аероплатформ на базі безпілотних літальних апаратів квазіадаптивно-квазіоптимальною системою управління польотом, функціонально поєднаною з активаторами палива (у разі оснащення безпілотних літальних апаратів двигунами внутрішнього згорання), що дозволяє виконувати польоти за енергозберігаючою траєкторією баражування, економити паливо, значно збільшувати тривалість польотів. Внаслідок цього підтримуватиметься тривалий безперервний радіозв'язок із можливістю тривалої передачі сигнальної, голосової і мультимедійної пошуковорятувальної інформації. На фіг. 1 показано, що безпілотна ретрансляційна аероплатформа 1, яка позначена півколом з суцільною лінією увійшла у повітряний простір над районом надзвичайної ситуації 2 (екологічного лиха), узявши функції ретрансляції, а безпілотна ретрансляційна аероплатформа 3, яка позначена півколом з переривчастою лінією щойно вийшла із повітряного простору над районом надзвичайної ситуації 2 (екологічного лиха), передавши функції ретрансляції безпілотній ретрансляційній аероплатформі 1, яка увійшла у повітряний простір над районом надзвичайної ситуації 2 (екологічного лиха) з горами (скелями) 4. Далі, одна безпілотна ретрансляційна аероплатформа 1 здійснює баражування за енергозберігаючими траєкторіями над районом надзвичайної ситуації (екологічного лиха) та забезпечує безперебійну тривалу ретрансляцію зв'язку та сигналів управління 5 рятувальниками 6 (пошуково-рятувальними групами). Під час баражування над районом надзвичайної ситуації безпілотної ретрансляційної аероплатформи 1 на базі безпілотного літального апарату (див. фіг. 1) вихідний сигнал U(t) задатчика 9 (див. фіг. 2) (задана висота Н на фіг. 1) подається на вхід обчислювального модуля квадратичного регулятора 10 (див. фіг. 1), що входить до складу квазіоптимальної системи управління 11 (на фіг. 2 позначена переривчастою лінією), в якому автоматично обчислюється зміна у часі помилки стеження ΔХ та розузгодження із заданою траєкторією ΔX(t) = X(t) - XM(t) та забезпечується автоматичне формування та передавання управляючих сигналів через суматор 12 в контур квазіадаптивної системи управління 13 (на фіг. 2 позначена переривчастою лінією з одною крапкою), через помножувачі 14 (фіг. 1), підсилювачі 15 (фіг. 1), інтегратори 16 5 UA 110683 C2 5 10 15 20 25 до суматорів 17. Одночасно сигнали видають блоки задавання коефіцієнтів 18 до суматорів 17. Суматори видають сигнали на помножувачі 19 та суматор 20. З помножувачів 19 через суматор 20 сигнали керування надходять на блок датчиків кутових швидкостей 21 з приймачем повітряного тиску 22 та супутниковим навігаційним приймачем 23 (для введення в систему інформації про кутові швидкості, повітряний тиск, про географічні координати місця положення безпілотної ретрансляційної аероплатформи 1 (див. фіг. 1), аналоговий-цифровий перетворювач 24 (див. фіг. 2), обчислювальний модуль 25, який додатково сприймає сигнали від блока задавання коефіцієнтів 18, адаптер 26 з квазіадаптивним регулятором 27 (фіг. 1), модулем стабілізації польоту 28 (фіг. 1) та модулем корегування траєкторії польоту 29 через помножувач 30 на блок сполучення 31. Оброблені та узгоджені сигнали з блока сполучення 31 надходять на блок задавання коефіцієнтів 19 та через суматор 32 одночасно подаються на об'єкт управління 33 (фіг. 2) та активатор палива 34, (Патент України № 105238. Активатор палива. Заявка а201204521. МПК: F02M 27/04 (2006.01). Винахідник/власник: Андрієвський Андрій Петрович. Опублік 25.04.2014. Бюл. Держ. служби інтел. власн. України № 8/2014), який забезпечує подачу палива до двигуна внутрішнього згорання в режимах найбільшого його навантаження та найбільшого енергоспоживання. Подані сигнали забезпечують функціонування активатора палива 34 під час функціонування двигуна під час набору висоти. Під час зниження квазіадаптивна система управління 13 відключатиме одночасно двигун 35 і активатор палива 34. Внаслідок функціонування квазіадаптивної-квазіоптимальної системи стабілізації польоту значно зменшується енергоспоживання під час польоту безпілотного літального апарату в будьяких умовах. Процес управління безпілотною ретрансляційною аероплатформою 1 (фіг. 1) за рахунок функціонування квазіоптимальної 11 та квазіадаптивної 13 систем управління 11 (фіг. 2) описується рівнянням стану: X A t Xt Bt Ut t , (1) Y CX t t , X R n - вектор стану безпілотної ретрансляційної аероплатформи 1; U R n - вектор керування; Y - вектор вимірювань A t , Bt - n n і n m матриці параметрів БПЛА; та - вектор шумів збурень та шумів вимірювання. де 30 35 Бажана динаміка польоту безпілотна ретрансляційна аероплатформа 1 з урахуванням вимог, які пред'являються до системи: зменшення часу адаптації, збільшення швидкості налаштування регулятора, зменшення середнього значення помилки вихідного сигналу безпілотної ретрансляційної аероплатформи 1 за весь час стабілізаційного процесу і внаслідок чого зменшення енергозатрат в процесі управління задається за допомогою еталонної моделі та активатора палива: X M A M X M t B MUt , (2) 40 45 де X M R n - вектор стану еталонної моделі, U R m - вектор вхідних дій, A M , BM , матриці відповідних розмірностей. В адаптері 26 (фіг. 1) функціонують квазіадаптивний регулятор 27 автоматичного управління польотом та модуль 28 стабілізації польоту. Обчислювальний модуль 25 (див. фіг. 2) взаємодіє з квазіадаптивним регулятором 27 автоматичного управління польотом адаптера 26 ураховує складові турбулентного вітру, послідовність включення виконавчих засобів (див. фіг. 2) та обчислює оптимальну по енерговитратам траєкторію 36 польоту (див. фіг. 1), а модуль 28 стабілізації польоту (на позиції 28 (фіг. 1) позначено як +М з переривчастими стрілками у вигляді півкіл), розміщений у адаптері 26 (фіг. 1), обчислює траєкторію польоту навколо центру мас безпілотного літального апарата в умовах дії інтенсивних зовнішніх збурень формує ідеальні управляючі сигнали U t і подає їх через помножувач 30 на блок сполучення 31 до виконавчих засобів 33, активатора палива 34, двигуна 35(див. фіг. 2). Наприклад, квазіадаптивний регулятор 27 (див. фіг. 2) автоматичного управління польотом та модуль стабілізації польоту 28 ураховує повздовжню складову турбулентного вітру 50 Hu s u 2L u V 1 , (3) Lu 1 s V 6 UA 110683 C2 1 Hu s u 6 0.8 4b , (4) 1 V 4b L3 w 1 s V бокову складову турбулентного вітру Lv s Lv V , (5) Hv s v V L v 2 1 V s L 1 3 w s Lw V , (6) H w s w V L w 2 1 V s s V Hq s H w s , (7) 4b 1 s V де b - розмах крила літака; L u , L v , L w - відповідні масштаби турбулентності; u , v , w 1 3 5 10 - середньоквадратичні відхилення відповідних компонентів швидкості. Також квазіадаптивний регулятор 27 (фіг. 1) (фіг. 1) автоматичного управління польотом та модуль 25 стабілізації польоту ураховує послідовність включення виконавчих засобів так (див. фіг. 1): xt Axt But yt Cx t Dut , (8) X R n - вектор стану, u R m - вхідний вектор, y R p - вихідний вектор, x 0 R n вектор стану в момент часу t t 0 , a A, B, C і D - матриці відповідних розмінностей. де 15 20 Квазіадаптивний регулятор 27 (див. фіг. 2) автоматичного управління польотом та модуль 28 стабілізації польоту адаптера 26 автоматично формують ідеальні сигнали управління польотом безпілотної ретрансляційної аероплатформи 1 (див. фіг. 1) з мінімальними енерговитратами за рахунок використання функцій Ляпунова та методу градієнтного спуску за умови відомих параметрів безпілотної ретрансляційної аероплатформи 1 з безпілотною ретрансляційною аероплатформою. Один із ідеальних сигналів управління з мінімальним середнім значенням помилки вихідного сигналу безпілотної ретрансляційною аероплатформи 1 за весь час стабілізаційного процесу описується так: E t K Ix X t K IU X t , (9) де K рівнянням: x , I 25 K U I - ідеальні коефіцієнти квазіадаптивного регулятора 27, які задовольняють BK Ix A M A , (10) BK IU B M , (11 На основі ідеального закону управління будується реальний закон управління Et K x t Xt K U t Xt , (12) 30 Оптимальне значення показника якості функціонування системи автоматичного управління безпілотної ретрансляційної аероплатформи 1, а саме зменшення середнього значення помилки вихідного сигналу безпілотної ретрансляційної аероплатформи 1 за весь час стабілізаційного процесу задається як формалізована ціль адаптивного управління: lim X t 0 , (13) t 7 UA 110683 C2 5 10 15 20 де X t X t XM t - помилки стеження та розузгодження із заданою траєкторією (2) і (12). Ціль адаптивного управління розв'язується за рахунок синтезованого квазіадаптивного регулятора 27, що входить в контур адаптації та реалізує ідеальний закон управління. Таким чином, квазіадаптивний регулятор 27 автоматичного управління польотом та модуль 28 (фіг. 1) стабілізації польоту адаптера 26 забезпечують автоматичне формування та передавання ідеальних управляючих сигналів (9) через блок сполучення 31 (фіг. 1) до виконавчих засобів 33, активатора палтва 34, двигуна 35. З використанням функції Ляпунова знаходимо зміни в часі реальних коефіцієнтів, які забезпечать досягнення мети управління K x t Xt Xt ; K U t Xt Ut , 14 Технічний результат досягається за рахунок того, що змінні в часі коефіцієнти і забезпечують зменшення впливу попередньо отриманих даних на процес регулювання, тобто враховують так званий ефект старіння попередньої інформації за рахунок чого удається зменшити час адаптації, збільшити швидкість налаштування квазіадаптивного регулятора 27, зменшити середнє значення помилки вихідного сигналу безпілотної ретрансляційної аероплатформи 1 за весь час стабілізаційного процесу і в наслідок чого зменшити енергозатрати в процесі управління t u 1 e u 1 e qt0 1 25 30 35 40 ... u 1 e t x 1 1 e qt0 x 2 1 e 2qt0 ... x n 1 e nqt0 2 2 qt0 n nqt 0 , (15) де q - коефіцієнт темпу старіння інформації, що підбирається емпірично залежно від умов функціонування об'єкту управління. Суттєвою особливістю функціонування квазіадаптивного регулятора є те, що змінні в часі коефіцієнти і включають коефіцієнт темпу старіння інформації q (15), що підбирається емпірично залежно від умов функціонування об'єкту управління 33 (фіг. 1), що дає змогу значно зменшити час адаптації. За рахунок функціонування квазіадаптивного регулятора 27 автоматичного управління польотом забезпечується безперешкодне своєчасне приймання сигналів від обчислювального модуля квадратичного регулятора 10, безперервне автоматичне обчислення енергозберігаючої траєкторії польоту та оперативне передавання обробленої інформації на модуль сполучення з виконавчими механізмами. За рахунок функціонування модуля стабілізації польоту 28 забезпечується оперативне приймання сигналів від обчислювального модуля квадратичного регулятора 10, автоматичне штучне формування і подавання управляючих сигналів стабілізації польоту навколо центру мас +М до виконавчих засобів 33, активатора палива 34, двигуна 35 і забезпечує спрямування сигналів з адаптера 26 до виконавчих засобів 33, активатора палива 34, двигуна 35, в режимі найскорішого приймання сигналів та забезпечує подачу управляючих сигналів до активатор палива 34, який забезпечує подачу палива до двигуна 35 в режимах найбільшого його навантаження та найбільшого енергоспоживання (на етапах зниження та набору висоти). Перед польотом безпілотної ретрансляційної аероплатформи 1 у модуль корегування траєкторії польоту 29 запрограмовують напрямки руху D ,L рятувальників 6. D та L декартові координати положення районів розміщення рятувальників у зоні надзвичайної ситуації природного чи техногенного характеру. Під час польоту безпілотної ретрансляційної аероплатформи 1 її модуль корегування траєкторії польоту 29 сприймає радіосигнали 5 від рятувальників 6 (пошуково-рятувальних груп) та одночасно передає їх у блок 36 визначення ймовірності РЗН(D, L) ураження рятувальників 6 (пошуково-рятувальних груп) агресивними чинниками залежно від координат району знаходження рятувальників 6 та у блок 37 розрахунку ймовірності РО(D, L) виконання завдання рятувальниками з цього ж району їх розміщення 7 без урахування впливу джерела аварії. Ці блоки оброблюють інформацію та надають її до блока 39 визначення ймовірності виконання завдання рятувальниками 6 з урахуванням впливу джерела аварії РВЗ(D, L) та оптимальних координат 40 (Dopt, Lopt) району розміщення рятувальників 6 (пошуково-рятувальних груп) відносно району 38 надзвичайної ситуації (аварії, катастрофи). РВЗ(D, L) = [1 - РЗН(D, L)] РО(D, L). (16) При цьому 45 50 55 8 UA 110683 C2 5 10 maxРВЗ = [1 - РЗН(Dopt, Lopt)] PO(Dopt, Lopt). (17) Розраховані у блоці 39 значення Dopt, Lopt та мінімальні й максимальні значення координат 40 (Dmin, Lmin, Dmax, Lmax) ретранслюються сигналами 5 через модуль корегування траєкторії польоту 29 безпілотної ретрансляційної аероплатформи 1 рятувальникам 6, які перебувають у будь-якому районі (районі розміщення 7, районі надзвичайної ситуації 38, у будь-якій координаті 40 на маршруті руху 8). Згідно з (16 та 17) (див. фіг. 1) збільшення дистанції від району, де відбулася аварія, веде до зменшення ймовірності РЗН ураження рятувальників, але й зменшення імовірністі РО виконання завдання. Це дає змогу центру управління 41 і рятувальникам 6 передбачити існування максимального значення РВЗ(Dopt, Lopt) та районів розміщення 7 рятувальників, які віддалені від району 38 надзвичайної ситуації, де відбулася аварія, на оптимальну відстань, що відповідає Dopt, Lopt. При цьому на фіг. 1 показано що у координатах 40 (Dmin, Lmin) на напрямках руху D та L відповідно домінують агресивні чинники. Рятувальникам 6 та потерпілим не можна 15 20 25 30 35 40 45 50 55 перебувати у цих координатах. І напроти, рятувальникам 6 та потерпілим можна безпечно перебувати у координатах 40 (Dmax, Lmax). Однак рятувальники 6, не зможуть виконати всі рятувальні завдання у цих координатах 40 (Dmax, Lmax). Рятувальники 6, аналізуючи коодинати Dmin, Lmin, Dmax, Lmax, можуть самостійно визначати час перебування у цих координатах 40 або на маршруті руху 8, залежно від оперативної обстановки, що склалася у районі надзвичайної ситуації 38. Рятувальники 6 (пошуково-рятувальні групи) можуть прокласти будь-який інший безпечний маршрут (аналогічний маршруту 8) за іншими вибраними ними безпечними координатами 40 (Dopt, Lopt) (17)для успішного виконання завдань щодо евакуації потерпілих у безпечний район 7. Інші, вибрані рятувальниками 6 координати 40 (Dopt, Lopt), які формують безпечний маршрут 8 для евакуації потерпілих у безпечний район 7, автоматично надходять до центру управління 41. У це же час (одночасно з передаванням сигналів рятувальникам 6 (пошуково-рятувальним групам) та надходженням координат Dmin, Lmin, Dmax, Lmax до центру управління 41) інформація, що стосується координат 40 (безпечного маршруту 8) надається у блок задання коефіцієнтів 18 і відповідно на ланцюг квазіадаптивної системи управління 13 (позиції 17, 19-29, 32 на фіг. 2) безпілотної ретрансляційної аероплатформи 1. Безпілотна ретрансляційна аероплатформа 1 автоматично баражує над рятувальниками 6 та забезпечує аеропросторову ретрансляцію пошуково-рятувальної інформації 5 (зв'язком). Рятувальники 6 можуть візуально орієнтуватися стосовно подальших своїх дій, спостерігаючи за траєкторією баражування безпілотної ретрансляційної аероплатформи 1, та візуально визначити безпечні райони (аналогічні безпечному району 7). Безпілотна ретрансляційна аероплатформа 1 за рахунок сумісного функціонування квазіоптимальної 11 і квазіадаптивної 13 системи автоматичного управління польотом та модуля корегування траєкторії польоту 29 може забезпечити вказування напрямку руху рятувальників 6 з потерпілими за принципом "Рухайся у мій бік" у разі виникнення радіоперешкод (див. фіг. 1 і фіг. 2). Центр управління 41 аналізує оперативну обстановку, оперативно оцінює зміни величин РЗН, РО, РВЗ від D та L та розробляє варіанти дій рятувальників 6 та варіанти допомоги рятувальникам 6 (пошуково-рятувальним групам), потерпілим (евакуойваним, врятованим) у районі 38 надзвичайної ситуації або у безпечному району 7 відповідно, та ретранслює інформацію 5 до рятувальників 6 через безпілотну ретрансляційну аероплатформу 1 (див. фіг. 1). Центр управління 41 визначає безпечний район розміщення 7 (див. фіг. 1), контролює перебування рятувальників 6 та потерпілих людей у небезпечних та (або) у безпечних координатах 40, маршрутах пересування 8 та розробляє варіанти забезпечення безперервним зв'язком рятувальників, надання потрібної інформації 5 в умовах ліквідації наслідків надзвичайної ситуації (екологічного лиха), у разі потреби підіймає у повітря наступний безпілотну ретрансляційну аероплатформу 1 на заміну попередній. Таким чином, блок 36 визначення ймовірності РЗН(D, L) ураження рятувальників (пошуковорятувальних груп) агресивними чинниками та у блок 37 розрахунку ймовірності PВЗ(D, L) виконання завдання відносно безпечного району розміщення 7 з урахуванням впливу джерела аварії відносно району 38 надзвичайної ситуації (аварії, катастрофи) і центр управління 41 обчислюють оптимальне положення безпечних районів 7 розміщення рятувальників від району 38, де відбулася надзвичайна ситуація - Dopt, Lopt (див. фіг. 1), та відносно траєкторії руху рятувальників 6 відносно положення такого району 41, за яким визначаються величини Dopt, Lopt. 9 UA 110683 C2 5 10 15 20 25 30 35 40 45 50 55 Як цільову функцію такої задачі в найбільш загальному вигляді центр управління 41 обчислює як (16) з обмеженнями Dmin ≤Dopt ≤Dmax, (18) Lmin ≤Lopt ≤Lmax, (19) де PВЗ(D, L) - визначений показник ефективності функціонування рятувальників 6 в умовах ліквідації наслідків надзвичайної ситуації (екологічного лиха), як функція D, L; Визначені значення показника PВЗ(D, L) ефективності функціонування рятувальників 6 залежно від району розміщення та часу перебування передається на засоби зв'язку рятувальників 6 у вигляді (18, 19): - найменших та найбільш допустимих значень відстані Dmin, Dmax району розміщення 7 рятувальників 6 в умовах ліквідації наслідків надзвичайної ситуації (екологічного лиха), від району 38 надзвичайної ситуації, де відбулася аварія; - найменших та найбільш допустимих значень відстані Lmin, Lmax району розміщення 7 від певного опорного напрямку 8, паралельного напрямку D, та розташованого від нього ліворуч або праворуч; - оптимальних значень Dopt відстані районів розміщення 38 рятувальників від району 38 надзвичайної ситуації, де відбулася аварія; - оптимальних значень Lopt відстані районів розміщення 7 від певного опорного напрямку 8, паралельного напрямку D, та розташованого від нього ліворуч або праворуч. Таким чином (див. фіг. 2), квазіоптимальна система управління 11 і квазіадаптивна система управління 13 утворюють квазіадаптивну-квазіоптимальну систему стабілізації польоту безпілотного літального апарата на траєкторіях баражування, яка забезпечує виконання функції корегування траєкторії польоту залежно від визначених нею (за радіосигналами від рятувальників 6) координат розміщення рятувальників 6 (Dmin, Dmax, Dopt, Lmin, Lmax, Lopt). Під час польотів виявлятимуться, прогнозуватимуться безпечні райони 7 розміщення та маршрути пересування 8 рятувальників 6 (пошуково-рятувальних груп) та (або) врятованих людей в умовах ліквідації наслідків екологічного лиха у районі надзвичайної ситуації 2, а також рятувальники 6 (пошуково-рятувальні групи) оперативно перенацілюватимуться на виконання екстрених (інших) завдань. Запропонований спосіб за рахунок застосування безпілотної аероретрансляційної платіформи 1 з квазіоптимальною системою управління 11 (на фіг. 2 позначена переривчастою лінією), квазіадаптивною системою управління 13, модулем корегування траєкторії польоту 29 залежно від радіосигналів від мобільних радіостанцій рятувальників 6 дозволяє визначити оптимальне положення району (ділянки) 7 безпечного розміщення рятувальників 6 і потерпілих людей (Dmin, Dmax, Dopt, Lmin, Lmax, Lopt) залежно від впливу джерела надзвичайної ситуації (РЗН) із врахуванням принципової необхідності мати інформацію про параметри оперативного стану надзвичайної ситуації, визначати безпечні координати 40 перебування, прокласти безпечний маршрут 8 за умови забезпечення безперебійним зв'язком. Модуль корегування траєкторії польоту 29, блок 36 визначення ймовірності РЗН ураження рятувальників 6 (пошуково-рятувальних груп), блок 37 розрахунку ймовірності РВЗ виконання завдання, блок 39 визначення оптимальних координат одночасно забезпечують корегування траєкторії польоту безпілотної ретрансляційної еароплатформи 1 на основі безпечних координат 40 перебування рятувальників 6 і потерпілих людей та надають у центр управління 41 інформацію щодо положення потерпілих та рятувальників 6 відносно району аварії 38. Суттєвою особливістю функціонування обладнання квазіоптимальної 11 і квазіадаптивної 13 систем управління, блока 39 визначення оптимальних координат, активатора палива 34 безпілотної ретрансляційної аероплатформи 1 (див. фіг. 2) є властивість забезпечувати нову ідеальну енергозберігаючу траєкторію польоту 36 (див. фіг. 2) навколо його центру мас (на фіг. 1 позначено як +М) в умовах дії інтенсивних зовнішніх збурень та за траєкторією двох лінійних ділянок і двох розворотів навколо характерної точки із почерговим зниженням H і набором висоти H , та зберігати її у разі змінювання координатних і параметричних збурень в широких межах, а також залежно від району розміщення рятувальників 6 (див. фіг. 2). Крім того, функціонування квазіоптимальної 11 і квазіадаптивної 13 систем управління дозволяє баражувати за енергозберігаючими траєкторіями над маршрутами 8 руху рятувальників 6, над районами надзвичайної ситуації 38, районами 7 безпечного розміщення рятувальників 6 або потерпілих. Безпілотна ретрансляційна аероплатформа 1 за рахунок сумісного функціонування квазіоптимальної 11 і квазіадаптивної 13 системи автоматичного управління польотом та модуля корегування траєкторії польоту 29 може забезпечити вказування напрямку руху 10 UA 110683 C2 5 10 15 20 25 30 35 рятувальників 6 з потерпілими за принципом "Рухайся у мій бік" у разі виникнення радіоперешкод (див. фіг. 1 і фіг. 2). Економія енерговитрат під час польоту безпілотної ретрансляційної еароплатформи 1 досягається за рахунок зменшення сили лобового опору під час польоту на лінійних ділянках траєкторії, за рахунок використання потенційної енергії безпілотної ретрансляційної еароплатформи 1 (див. фіг. 1), яка у разі розвороту переходить в кінетичну, що спричиняє збільшення швидкості польоту і можливості здійснювати розворот на 180° зі зниженням H та з подальшим набором висоти H з найменшими витратами енергії порівняно з координованим польотом та за рахунок активатора палива 34 (фіг. 1), який забезпечує подачу палива до двигуна 35 (фіг. 1), в режимах найбільшого його навантаження та найбільшого енергоспоживання (на поворотах та під час набору висоти). Це дозволяє значно збільшити тривалість польоту безпілотної ретрансляційної еароплатформи 1. Реалізація способу зниження енерговитрат під час польоту безпілотного літального апарата 1 (див. фіг. 1) за новою траєкторією 36 (фіг. 2) забезпечує збільшення тривалості до 40 хвилин та становить Тнов=240 хвилин. Водночас, зекономлене паливо за рахунок функціонування активатора палива 34 забезпечить продовження польоту 40 хвилин за новою траєкторією 36 (фіг. 2), а загальна тривалість уже становитиме 280 хвилин, тобто збільшиться на 40 % від встановленої виробником тривалості Тчин. польоту. Тнов.>Тчин. (20) Протягом тривалого польоту безпілотної ретрансляційної еароплатформи 1 забезпечується економія льотного ресурсу, автономно визначається положення безпечних районів розміщення 7, маршрутів 8 пересування рятувальників 6 в умовах ліквідації наслідків екологічного лиха завдяки функціонуванню центру управління 41 та ретрансляції сигналів 5 рятувальникам 6 та безперервний зв'язок з рятувальниками в небезпечних районах 38 у районах зі зруйнованою або відсутньою інфраструктурою, наприклад, в зоні надзвичайної ситуації природного чи техногенного характеру для ефективного функціонування мобільних засобів зв'язку в інтересах ефективної взаємодії наземних пошуково-рятувальних груп. Реалізація способу надає можливість: забезпечити високу пропускну здатність системи зв'язку у епізодичній (ситуаційній) радіомережі у зоні надзвичайної ситуації; оперативно безперебійно зібрати і передати інформацію про поточне розміщення та переміщення рятувальників (пошуково-рятувальних груп); визначити зміни структурної зв'язності рятувальників (пошуково-рятувальних груп - мобільних абонентів мережі); оптимально розмістити будь-яку із безпілотних ретрансляційних аероплатформ (повітряних ретрансляторів); уникнути переривання радіозв'язку між рятувальниками (пошуково-рятувальними групами (мобільними абонентами) у разі їх швидкого та непередбачуваного переміщення завдяки керованій оперативній просторовій передислокації та переорієнтації безпілотних ретрансляційних аероплатформ. ФОРМУЛА ВИНАХОДУ 40 45 50 55 60 1. Спосіб безперервної аеропросторової ретрансляції пошуково-рятувальної інформації в умовах ліквідації наслідків надзвичайної ситуації, за яким у повітря піднімають безпілотну ретрансляційну аероплатформу, утворюють на земній поверхні зону радіопокриття фіксованого радіуса, ретранслюють сигнали, забезпечують зв'язок між мобільними абонентами радіомережі, в центрі управління збирають дані про поточне розміщення мобільних абонентів, тип, інтенсивність та розподілення трафіку мобільних абонентів, відбирають варіанти зв'язності мережі та оперативно визначають оптимальне розміщення безпілотної ретрансляційної аероплатформи, піднімають в повітря інші безпілотні ретрансляційні аероплатформи та розміщують їх в зонах ретрансляції сигналів, розподіляють трафік між абонентами бездротової епізодичної мережі, який відрізняється тим, що перед застосуванням безпілотні ретрансляційні аероплатформи оснащують квазіадаптивною-квазіоптимальною системою управління польотом з модулем корегування траєкторії польоту, а систему живлення двигунів внутрішнього згорання оснащують активаторами палива, підключають їх до квазіадаптивнихквазіоптимальних систем автоматичного управління, у повітря піднімають безпілотні ретрансляційні аероплатформи почергово, замінюючи одну іншою з умовою непереривання зв'язку, за сигналами мобільних телефонів модулем корегування траєкторії польоту відслідковують райони розміщення рятувальників або потерпілих, під час польоту кожного із безпілотних літальних апаратів квазіадаптивною-квазіоптимальною системою управління визначають найкраще просторове положення кожного із безпілотних ретрансляційних аероплатформ, які баражують в зонах ретрансляції сигналів за енергозберігаючою траєкторією 11 UA 110683 C2 5 10 15 20 у вигляді двох лінійних ділянок і двох розворотів із почерговим зниженням і набором висоти в умовах дій інтенсивних зовнішніх збурень над районами надзвичайної ситуації, районами перебування та маршрутами руху рятувальників та потерпілих, під час баражування охоплюють зони ретрансляції сигналів та безперервно збирають інформацію про небезпечні та безпечні координати та райони розміщення потерпілих, обчислюють варіанти підтримки зв'язності мережі зв'язку залежно від рельєфу місцевості, положення рятувальників та потерпілих, квазіадаптивною-квазіоптимальною системою управління моделюють імовірність ураження рятувальників та потерпілих агресивними чинниками надзвичайної ситуації та імовірність виконання завдання, та оперативно визначають координати перебування рятувальників та потерпілих та оптимальне розміщення будь-якої чергової безпілотної ретрансляційної аероплатформи над координатами та районами дій рятувальників та перебування потерпілих, маршрути безпечного переміщення рятувальників та потерпілих і на основі цього прогнозують необхідну тривалість часу підтримки структурної зв'язності інформаційної системи рятувальників, через безпілотну ретрансляційну аероплатформу по засобах бездротової епізодичної радіомережі безперервно ретранслюють координати рятувальників та інформацію у аеропросторі до центру управління, через безпілотну ретрансляційну аероплатформу від центру управління до рятувальників ретранслюють інформацію про гідрометеорологічну та екологічну обстановку та координують дії рятувальників щодо місця і часу їх безпечного розташування у будь-якому районі, маршрути, відстані і час їх пересування. 2. Спосіб за п. 1, який відрізняється тим, що баражування за енергозберігаючими траєкторіями, забезпечення сталого зв'язку, ретрансляція пошуково-рятувальної інформації та прогнозування дій рятувальників здійснюються одночасно. 12 UA 110683 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 13
ДивитисяДодаткова інформація
Автори англійськоюRomanchenko Ihor Serhiiovych, Lysenko Oleksandr Ivanovych, Khazanovych Oleksandr Izrailiovych, Semenchenko Serhii Ivanovych, Chumachenko Serhii Mykolaiovych, Turovets Yulia Stanislavivna, Chekanova Iryna Vitaliivna
Автори російськоюРоманченко Игорь Сергеевич, Лысенко Александр Иванович, Хазанович Олександр Израилевич, Семенченко Андрей Иванович, Чумаченко Сергей Николаевич, Туровец Юлия Станиславовна, Чеканова Ирина Витальевна
МПК / Мітки
МПК: H04W 16/10, H04W 8/02, B64C 19/00, G05D 1/08
Мітки: ліквідації, аеропросторової, умовах, спосіб, надзвичайно, наслідків, пошуково-рятувальної, ретрансляції, безперервної, ситуації, інформації
Код посилання
<a href="https://ua.patents.su/15-110683-sposib-bezperervno-aeroprostorovo-retranslyaci-poshukovo-ryatuvalno-informaci-v-umovakh-likvidaci-naslidkiv-nadzvichajjno-situaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб безперервної аеропросторової ретрансляції пошуково-рятувальної інформації в умовах ліквідації наслідків надзвичайної ситуації</a>
Спосіб безперервної аеропросторової ретрансляції пошуково-рятувальної інформації в умовах ліквідації наслідків надзвичайної ситуації
Номер патенту: 99483
Опубліковано: 10.06.2015
Автори: Прищепа Тетяна Олексіївна, Валуйський Станіслав Вікторович, Туровець Юлія Станіславівна, Хазанович Олександр Ізраільович, Новіков Валерій Іванович, Нікулін Олександр Федорович, Лисенко Олександр Іванович, АНДРІЄВСЬКИЙ АНДРІЙ ПЕТРОВИЧ, Данилюк Сергій Леонідович, Чеканова Ірина Віталіївна, Чумаченко Сергій Миколайович, Романченко Ігор Сергійович, Тачиніна Олена Миколаївна, Семенченко Андрій Іванович
МПК: G01C 21/34, B64C 19/00, H04W 16/10, H04W 8/02
Мітки: ситуації, інформації, безперервної, ретрансляції, спосіб, надзвичайно, пошуково-рятувальної, умовах, аеропросторової, наслідків, ліквідації
Формула / Реферат:
1. Спосіб безперервної аеропросторової ретрансляції пошуково-рятувальної інформації в умовах ліквідації наслідків надзвичайної ситуації, за яким у повітря піднімають безпілотну ретрансляційну аероплатформу, утворюють на земній поверхні зону радіопокриття фіксованого радіуса, ретранслюють сигнали, забезпечують зв'язок між мобільними абонентами радіомережі, в центрі управління збирають дані про поточне розміщення мобільних абонентів, тип,...
Спосіб ліквідації наслідків газодинамічних впливів
Номер патенту: 7924
Опубліковано: 26.12.1995
Автори: Горягін Леонід Федорович, Ковтун Олександр Михайлович, Волошин Олексій Іванович, Ісютін Анатолій Григорович, Мирончак Олег Петрович, Потураєв Валентин Микитович, Мінеев Сергій Павлович
МПК: E21F 5/00
Мітки: спосіб, ліквідації, газодинамічних, наслідків, впливів
Формула / Реферат:
1. Способ ликвидации последствий газодинамических явлений, включающий формирование вдоль оси выработки в теле завала горной массы опережающей полости, гидроразмыв тела завала в высоконапорном режиме из этой полости, удаление размытой горной массы, отличающийся тем, что, с целью повышения эффективности и безопасности работ путем учета неоднородности состава горной массы в теле завала, предварительно определяют расстояние между трещинами...
Спосіб ліквідації наслідків фосфорної аварії і нейтралізації жовтого фосфору
Номер патенту: 59871
Опубліковано: 10.06.2011
Автор: Тузяк Віра Євгенівна
МПК: A62D 3/00
Мітки: нейтралізації, жовтого, спосіб, фосфорної, ліквідації, аварії, наслідків, фосфору
Формула / Реферат:
Спосіб ліквідації наслідків фосфорної аварії та нейтралізації жовтого фосфору і отруйних його сполук характеризується тим, що нейтралізацію жовтого фосфору і продуктів його горіння, які знаходяться під захисним шаром води, здійснюють негашеним вапном, яке засипають безпосередньо у захисний шар води.
Спосіб розбирання завалів зруйнованих споруд при ліквідації наслідків стихійних лих
Номер патенту: 61335
Опубліковано: 11.07.2011
Автори: Хмара Леонід Андрійович, Шатов Сергій Васильович
МПК: B60P 1/54
Мітки: споруд, розбирання, стихійних, лих, завалів, ліквідації, зруйнованих, наслідків, спосіб
Формула / Реферат:
Спосіб розбирання завалів зруйнованих споруд при ліквідації наслідків стихійних лих, що включає руйнування нестійких елементів споруд, який відрізняється тим, що уламки споруд після руйнування навантажують у транспортні засоби почергово телескопічними екскаваторами та ківшовими навантажувачами.
Самоскид для ліквідації наслідків зсувів ґрунтів
Номер патенту: 73705
Опубліковано: 10.10.2012
Автори: Моторний Микола Антонович, Сєдін Володимир Леонідович, Шатов Сергій Васильович, Бікус Катерина Михайлівна, Ткач Сергій В'ячеславович
МПК: B60P 1/52
Мітки: наслідків, самоскид, ґрунтів, ліквідації, зсувів
Формула / Реферат:
Самоскид для ліквідації наслідків зсувів ґрунтів, що містить базовий автомобіль з рамою та шасі, кузов, телескопічний гідроциліндр, який відрізняється тим, що всередині кузова встановлена додаткова секція з пристроєм її поздовжнього переміщення, виконаним у вигляді роликоопор, розміщених в місцях контакту додаткової секції з кузовом автомобіля, та обладнаним гідроциліндром керування.
Попередній патент: Перемикаючий елемент потужного інвертора
Наступний патент: Спосіб хромотитанування
Випадковий патент: Спосіб консервування перепелиних яєць