Система керування і позиціонування для заміни елементів футерівки від спрацювання на схильній до спрацьовування стінці
Номер патенту: 116084
Опубліковано: 12.02.2018
Автори: Мьоллєр Таге, Йоханссон Денніс, Фуртенбах Ларс



Формула / Реферат
1. Система керування і позиціонування для позначення монтажного положення змінного елемента (10) футерівки від спрацювання на поверхні стінки (2), схильній до спрацювання, яка може бути утворена, наприклад, внутрішньою поверхнею обертового барабана (1) на дробарці руди, і де елемент футерівки від спрацювання підтримується на вільному кінці здатної до маневрування стріли, яка є компонентом підіймального пристрою (14), керованого під час здійснення маніпулювання елементом футерівки від спрацювання під час здійснення оператором (5) крана операції монтажу, за допомогою чого забезпечується стінка з набором монтажних отворів (21), а елемент футерівки від спрацювання оснащується на своїй нижній поверхні засобами (17) з'єднання, за допомогою яких елемент футерівки від спрацювання закріплюється на поверхні за допомогою допоміжних засобів (17') з'єднання, що вставляються через монтажні отвори, яка відрізняється тим, що містить:
стінку (2), яка містить монтажні отвори (21), які утворюють першу систему (Rv) орієнтування,
елемент (10) футерівки від спрацювання, що містить засоби (17) з'єднання, розташовані на нижній поверхні цього елемента і формують другу систему (Rs) орієнтування,
двовимірний датчик (31, 31'), розташований стаціонарно на зовнішній поверхні стінки (2), яка розташована на стороні стінки монтажної поверхні, протилежній схильній до спрацьовування стороні, таким чином, щоб поле огляду датчика містило нижню поверхню елемента (10) футерівки від спрацювання, що проглядається через монтажні отвори (21), причому датчик виконаний з можливістю передачі електричного сигналу, що представляє зображення взаємного розташування першої і другої систем (Rv, Rs) орієнтування, і під керуванням цього зображення оператором (5) крана може визначатися монтажне положення елемента (10) футерівки від спрацювання на стінці.
2. Система керування і позиціонування за п. 1, в якій двовимірний датчик (31, 31') містить дві камери для запису зображень, безпечно прикріплені до першої системи (Rv) орієнтування таким способом, щоб їх поля огляду містили засоби з'єднання (17), розташовані на нижній поверхні елемента (10) футерівки від спрацювання, видимі через монтажні отвори (21).
3. Система керування і позиціонування за п. 2, яка додатково містить блок (42) обробки зображень, який перетворює електричний сигнал від камер (31, 31') для запису зображень в графічне двовимірне зображення (44а, 44b), і блок (44) відображення, за допомогою якого оператору (5) крана в режимі реального часу може бути представлене зображення так, щоб оператор (5) крана міг спрямовувати і здійснювати маневрування підіймальним пристроєм і таким чином приводити елемент (10) футерівки від спрацювання в його монтажне положення на стінці (2).
4. Система керування і позиціонування за будь-яким із пунктів 1-3, що містить джерело освітлення (32), виконане з можливістю випромінювання світла від зовнішньої поверхні стінки (2) через монтажні отвори (21) або отвори стінки в напрямку до нижньої поверхні елемента (10) футерівки від спрацювання.
5. Система керування і позиціонування за будь-яким із пунктів з пунктів 1-4, в якій двовимірний датчик (31, 31') містить напрямну (36b) в формі кільця для вставлення як контактний вимірювальний наконечник в монтажні отвори (21) стінки (2) для геометричного визначення геометричного положення першої системи (Rv) орієнтування.
6. Система керування і позиціонування за п. 5, що містить корпус (34), в якому розміщено камеру (31, 31') для запису зображень і джерело освітлення (32), і корпус якої оснащений на передньому кінці напрямною (36b) в формі кільця і засобом (35) з'єднання, що надає корпусу можливість бути змонтованим на зовнішній поверхні стінки (2) в поєднанні з монтажним отвором (21), способом, що надає можливість його знімання.
7. Система керування і позиціонування за п. 6, в якій засіб (35) з'єднання містить магнітне з'єднання.
8. Система керування і позиціонування за будь-яким із пунктів 4-7, в якій кожна камера (31, 31') для запису зображень містить об'єктив (33), на якому виконане джерело освітлення (32) як набір світлодіодів LED, розподілених по колу об'єктива (33).
9. Система керування і позиціонування за будь-яким із пунктів 1-7, яка додатково містить підіймальний пристрій (14) типу, що демонструє блок (14b) керування, забезпечений передавачем і приймачем з метою надавання можливості дистанційного керування для засобу (14а) керування і привідного механізму підіймального пристрою, і де сигнали керування посилаються як електричні команди керування на керування в блоці керування пристрою, блок зовнішнього зв'язку (108, 106, 120, 44, 20b), що пропонує з'єднання двостороннього зв'язку через інтернет (100) з блоком керування і блоком обробки зображень, і за допомогою якого оператор (5) крана, розташованого на відстані, може в режимі реального часу спрямовувати і здійснювати керування взаємним розташуванням систем (Rv, Rs) орієнтування.
10. Система керування і позиціонування за п. 9, в якій блок зовнішнього зв'язку (108, 106, 120, 44, 20b) містить комп'ютерний термінал з асоційованим важелем керування.
11. Застосування камери (31, 31') для запису зображень для визначення взаємного розташування змінного елемента (10) футерівки від спрацювання і певного монтажного положення для згаданого елемента на поверхні, сформованого на внутрішній поверхні схильної до спрацювання стінки (2) з монтажними отворами (21) для елемента футерівки від спрацювання, причому камера виконана так, щоб нижня поверхня елемента (10) футерівки від спрацювання проглядалася через монтажний отвір в стінці.
Текст
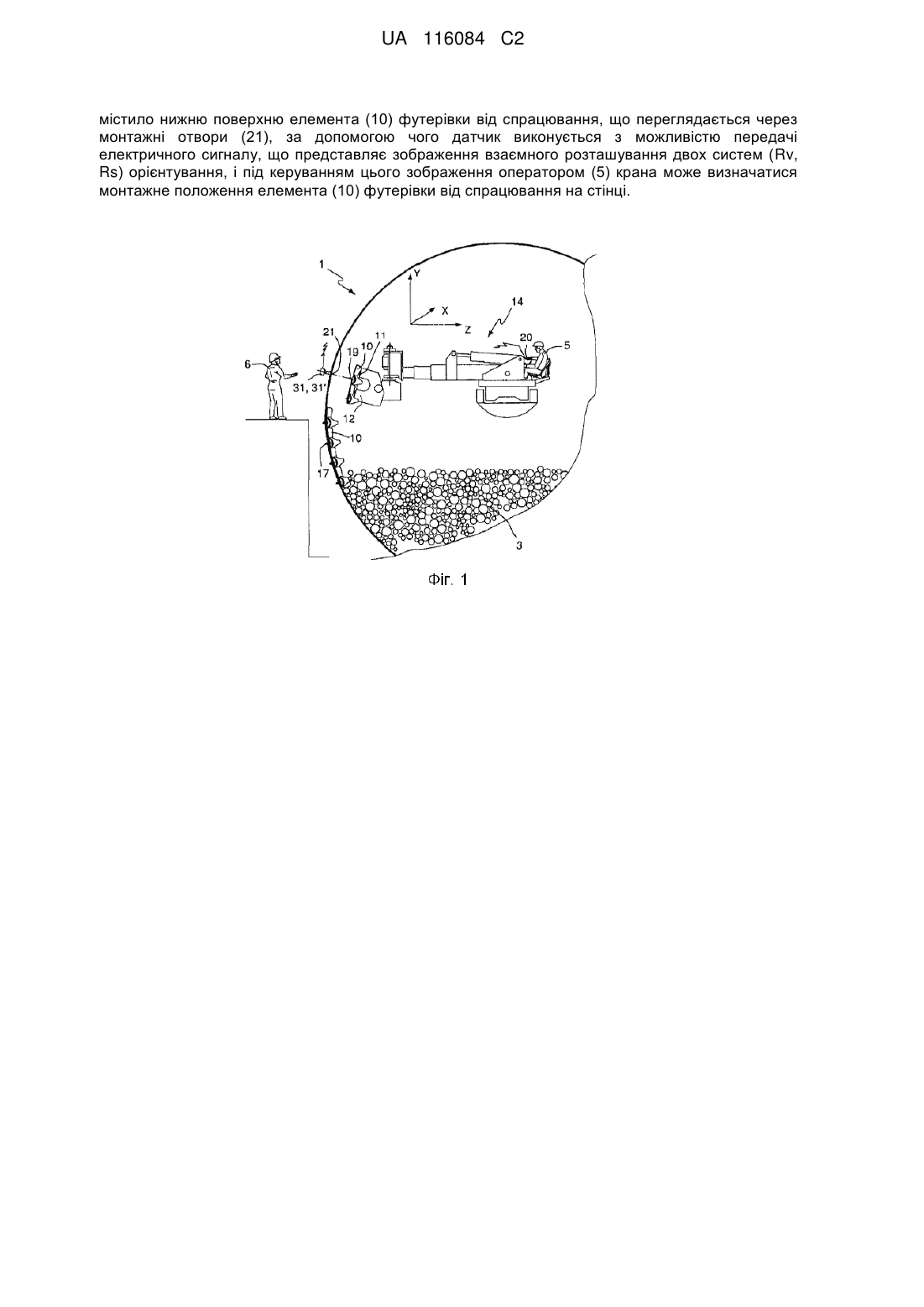
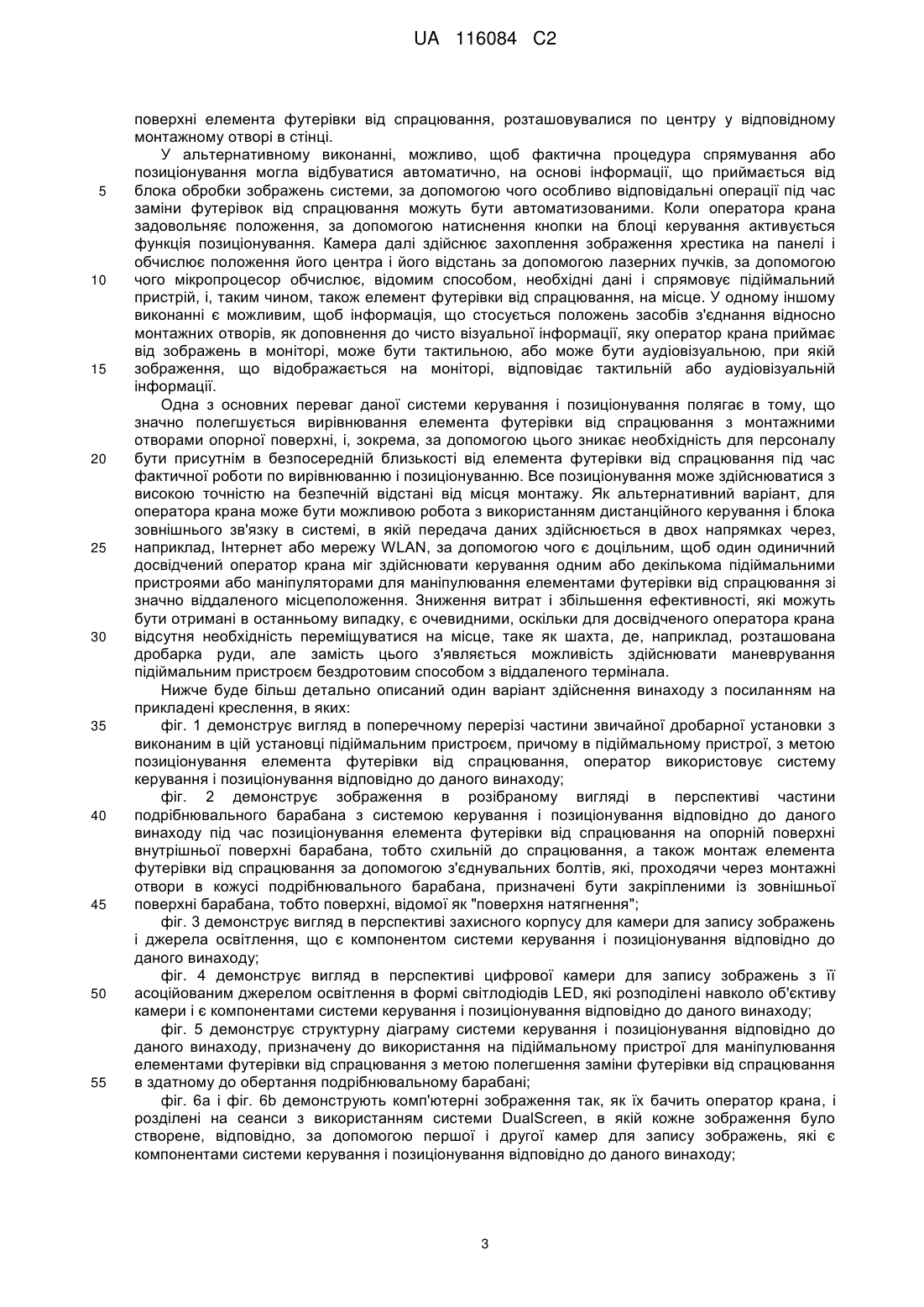
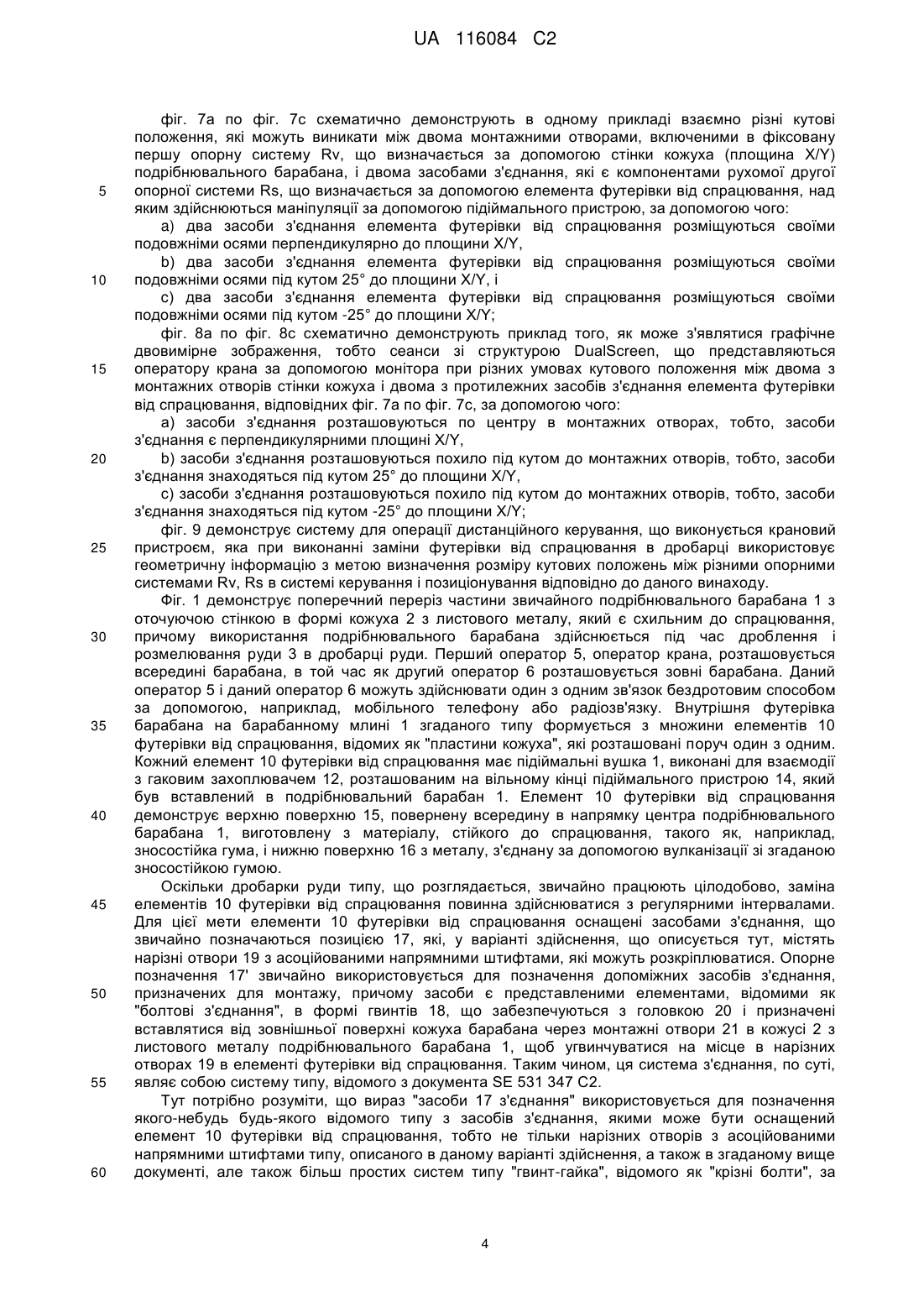
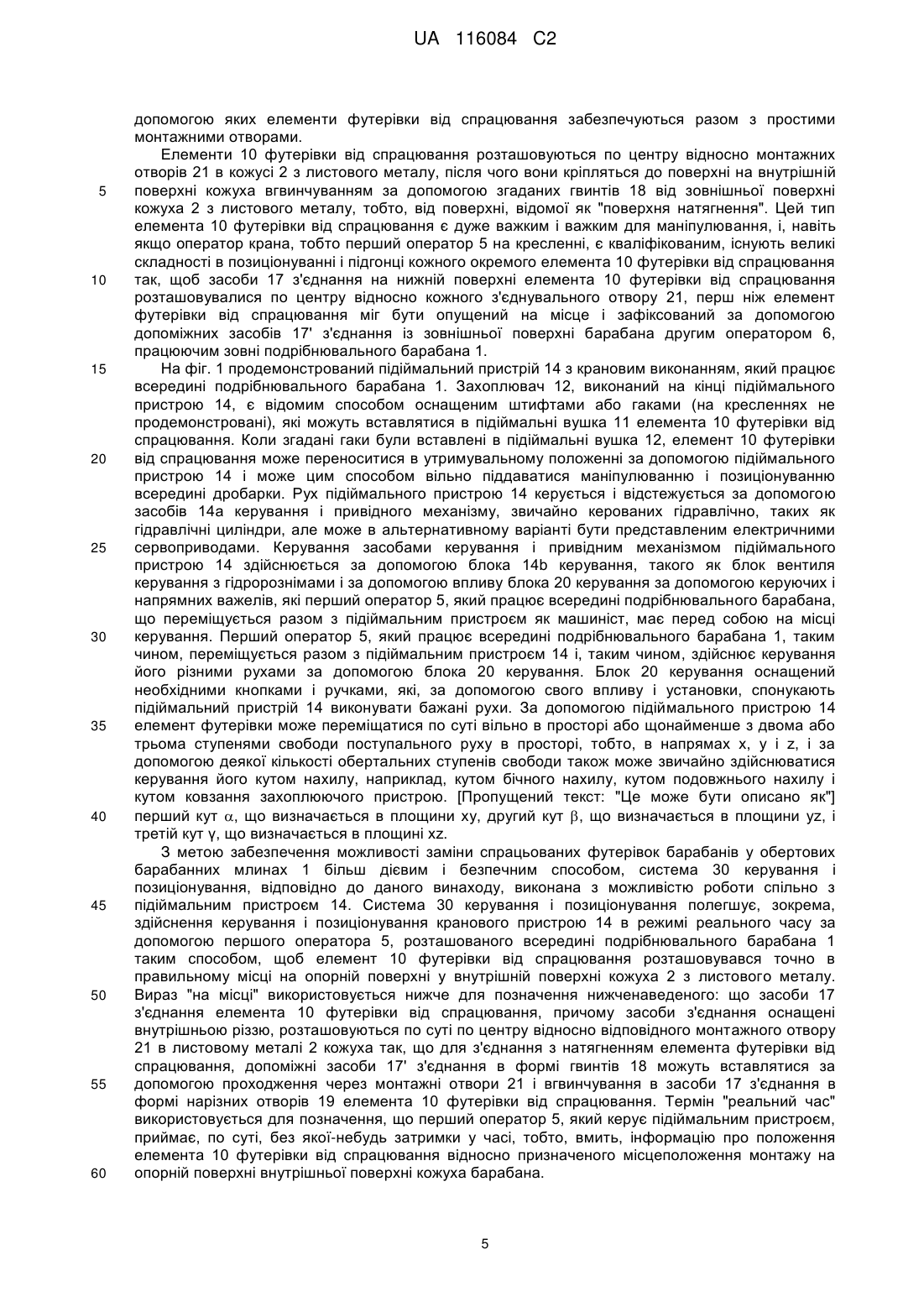
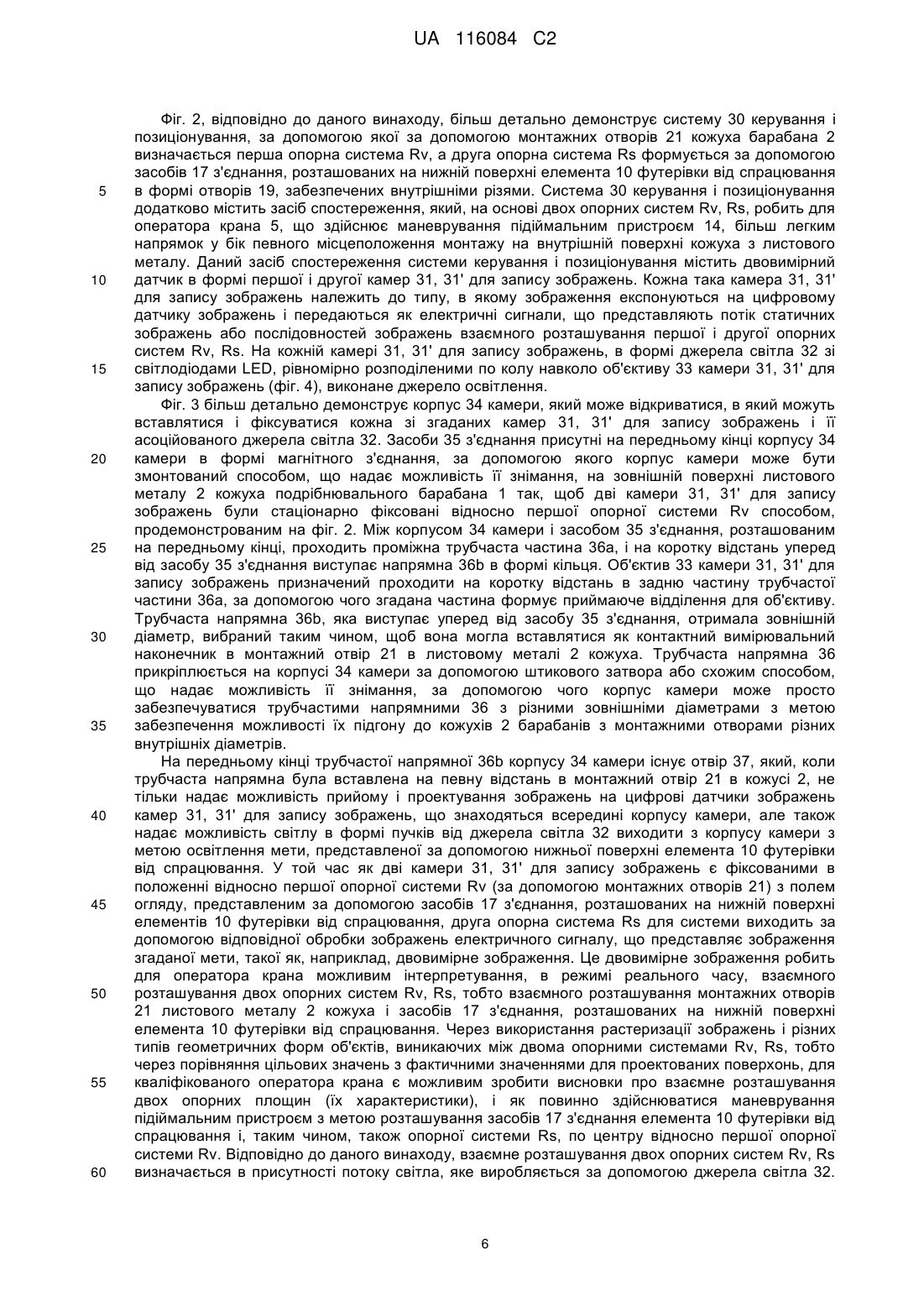
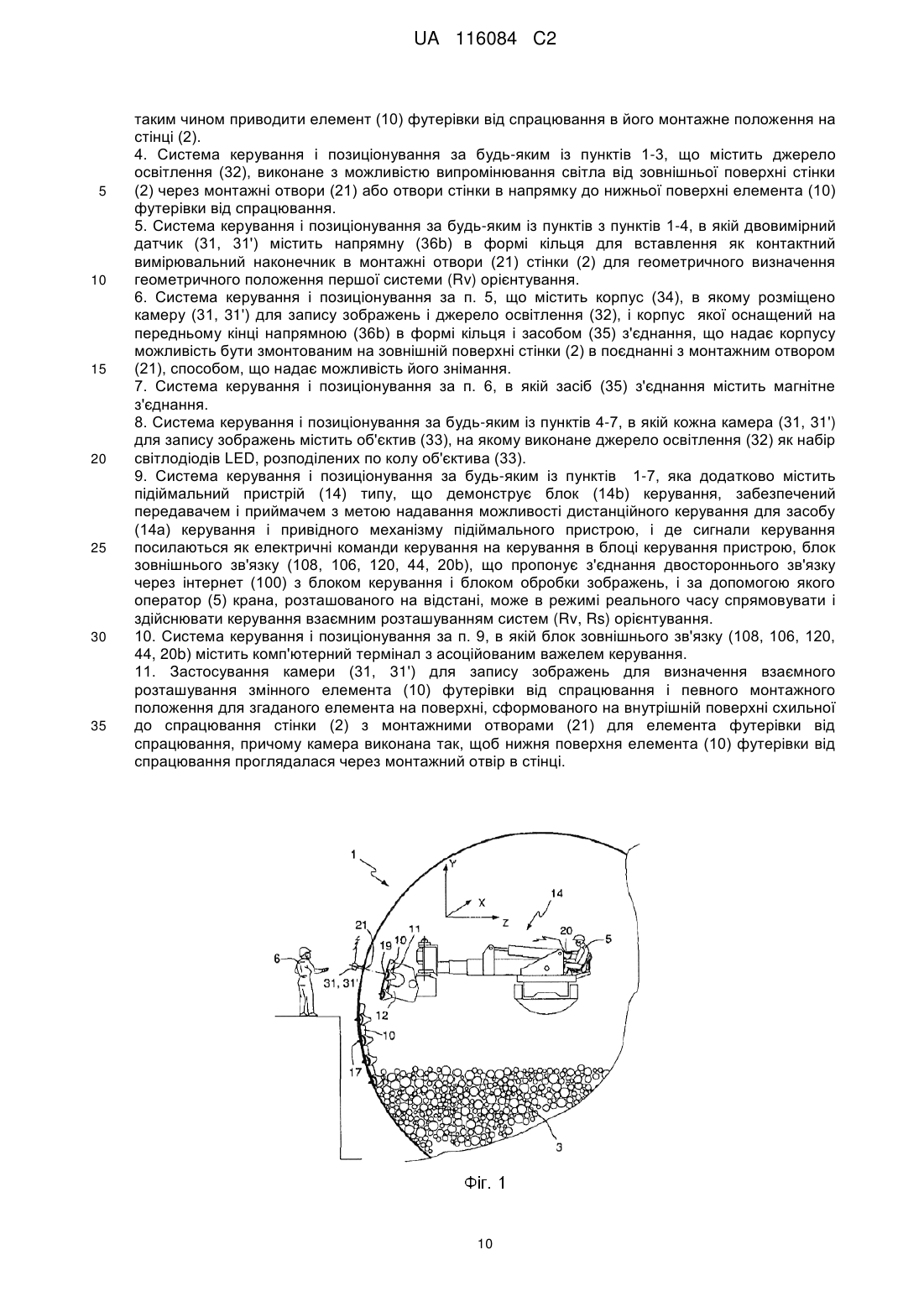
Реферат: Винахід стосується системи керування і позиціонування для позначення монтажного положення змінного елемента (10) футерівки від спрацювання на поверхні стінки (2), схильній до спрацювання, який може бути представленим за допомогою, наприклад, внутрішньої поверхні обертового барабана (1) на дробарці руди, і де елемент футерівки від спрацювання підтримується на вільному кінці здатної до маневрування стріли, яка є компонентом підіймального пристрою (14), керованого під час здійснення маніпулювання елементом футерівки від спрацювання під час здійснення оператором (5) крана операції монтажу, за допомогою чого забезпечується стінка з набором монтажних отворів (21), а елемент футерівки від спрацювання оснащується на своїй нижній поверхні набором засобів (17) з'єднання, за допомогою яких елемент футерівки від спрацювання закріплюється на поверхні за допомогою допоміжних засобів (17') з'єднання, що вставляються через монтажні отвори. Для здійснення ефективного і безпечного монтажу дана система містить: першу систему (Rv) орієнтування, сформовану за допомогою монтажних отворів (21) стінки (2), другу опорну систему (Rs) орієнтування, сформовану за допомогою засобів (17) з'єднання, розташованих на нижній поверхні елемента (10) футерівки від спрацювання, двовимірний датчик (31, 31'), виконаний стаціонарно на зовнішній поверхні стінки (2), тобто на стороні стінки монтажної поверхні, протилежній схильній до спрацьовування стінки, таким способом, щоб поле огляду датчика UA 116084 C2 (12) UA 116084 C2 містило нижню поверхню елемента (10) футерівки від спрацювання, що переглядається через монтажні отвори (21), за допомогою чого датчик виконується з можливістю передачі електричного сигналу, що представляє зображення взаємного розташування двох систем (Rv, Rs) орієнтування, і під керуванням цього зображення оператором (5) крана може визначатися монтажне положення елемента (10) футерівки від спрацювання на стінці. UA 116084 C2 5 10 15 20 25 30 35 40 45 50 55 60 Даний винахід стосується системи керування і позиціонування для позначення взаємного розташування змінного елемента футерівки від спрацювання і попередньо визначеного монтажного положення на поверхні, сформованій на внутрішній поверхні схильної до спрацьовування стінки, наприклад, в обладнанні, що здійснює маніпуляції з дробленою рудою або кам'яним матеріалом відповідно до ввідної частини п. 1 формули винаходу. У альтернативному виконанні, даний винахід робить можливим здійснення також такої заміни футерівки від спрацювання за допомогою дистанційного керування і двостороннього зв'язку через Інтернет. Схильна до спрацьовування стінка, така як кожух подрібнювального барабана, що використовується під час дроблення і збагачення руди, є покритою, на схильній до спрацьовування внутрішній поверхні, футерівкою від спрацювання з, наприклад, еластомерного матеріалу. Ця футерівка від спрацювання звичайно кріпиться за допомогою гвинтового з'єднання до поверхні циліндричного листового металу кожуха, що формує обертовий барабан дробарки. Футерівка від спрацювання подрібнювального барабана є сформованою з множини елементів футерівки від спрацювання, розташованих поблизу один одного в секціях, причому елементи є з'єднаними з внутрішньою поверхнею барабана за допомогою засобів з'єднання в формі, наприклад, болтів, що проходять через монтажні отвори, виконані в листовому металі кожуха барабана. Оскільки елементи футерівки від спрацювання є розміщеними в положенні з боку схильної до спрацьовування стінки кожуха, але кріпляться через з'єднувальні отвори з протилежної сторони поверхні кожуха, відомої як "поверхня натягнення", виникають значні проблеми під час припасування кожного окремого елемента футерівки від спрацювання так, щоб засоби з'єднання елемента футерівки від спрацювання, які в своїй найпростішій формі можуть включати в себе звичайні з'єднувальні отвори в елементі футерівки від спрацювання, розташовувалися по центру відносно кожного з'єднувального отвору в кожусі до того, як елемент футерівки від спрацювання опускається на місце. Елементи футерівки від спрацювання є дуже важкими і вимагають підіймальних засобів, таких як стріли кранів, маніпулятори або подібне до цього, для здійснення маніпуляцій з елементами футерівки від спрацювання всередині барабана. Подрібнювальні барабани цього типу звичайно знаходяться в роботі 24 години на добу, а це означає, що футерівка піддається дуже сильному спрацюванню, і її заміна повинна здійснюватися досить часто. При заміні футерівки елементи футерівки підіймаються в барабан з одного кінця і вміщуються на опорній поверхні на внутрішній поверхні кожуха. Навіть якщо оператор крана є досвідченим, сама підгонка елементів футерівки від спрацювання на поверхню кожуха є витратною за часом і небезпечною роботою, особливо якщо елементи футерівки від спрацювання належать до типу, який використовує елементи, відомі як "крізні болти" і гайки. Заміна футерівки барабана, крім всього іншого, є дорогою внаслідок того факту, що вона звичайно передбачає тривалі зупинки виробництва. Відомі різні типи підіймального і маніпуляційного обладнання, такі як підіймальні крани, призначені для полегшення заміни футерівок барабанів. Таке маніпуляційне обладнання звичайно містить підіймальний пристрій, такий як стріла або підіймальний кран, яким можна маневрувати всередині подрібнювального барабана, і яке забезпечується на своєму вільному кінці захоплюючим пристроєм, за допомогою якого елемент футерівки від спрацювання може захоплюватися і підтримуватися в утримувальному положенні. За допомогою підіймального крана захоплюючий пристрій і, таким чином, елемент футерівки може переміщуватися по суті вільно в просторі або зі щонайменше двома або трьома ступенями свободи поступального руху в просторі, тобто, в напрямах х, у і z, і за допомогою деякої кількості обертальних ступенів свободи звичайно може здійснюватися керування його кутом нахилу, наприклад, кутом бічного нахилу, кутом подовжнього нахилу і кутом ковзання захоплюючого пристрою. [Пропущений текст: "Це може бути описано як"] перший кут , що визначається в площині xy, другий кут , що визначається в площині yz, і третій кут γ, що визначається в площині xz. Кількість ступенів свободи здатної до маневрування стріли може варіюватися залежно від конкретного виконання підіймального пристрою. Маневрування підіймальним пристроєм звичайно здійснюється за допомогою оператора, який супроводжує підіймальний пристрій або присутнього в його безпосередній близькості і керуючого ним за допомогою блока керування. Як було згадано вище, однією з основних проблем при заміні футерівок барабанів є складність позиціонування і підгонки кожного окремого елемента футерівки від спрацювання так, щоб його засоби з'єднання розташовувалися в центрі з'єднувальних отворів, виконаних в стінці барабана, перш ніж елемент футерівки від спрацювання міг бути опущений на місце, і з'єднувальні елементи застосовані так, щоб стало можливим приєднання футерівки від спрацювання за допомогою допоміжного засобу з'єднання. Згаданий допоміжний засіб 1 UA 116084 C2 5 10 15 20 25 30 35 40 45 50 55 з'єднання звичайно представлений за допомогою системи болтових з'єднань, за допомогою яких елемент футерівки від спрацювання вміщується з натягненням на внутрішній поверхні подрібнювального барабана за допомогою гвинтів, які вставляються через існуючі з'єднувальні отвори в елементах і які далі виходять з монтажних отворів в подрібнювальному барабані, завдяки чому гвинти утримуються на місці за допомогою гайок на зовнішній поверхні (поверхні натягнення) подрібнювального барабана. [Пропущено "В"] документі SE 531 347 C2, однак, описується нова техніка монтажу, в якій елементи футерівки від спрацювання оснащені нарізними отворами з асоційованими напрямними штифтами. Таким чином, гайки не потрібні. З'єднання досягається за допомогою болтів (таких як гвинти), що вставляються через монтажні отвори від зовнішньої поверхні подрібнювального барабана (поверхні натягнення). Під час монтажу елементів футерівки від спрацювання звичайним випадком є, коли оператор крана, через радіозв'язок або схожим чином, знаходиться в стані бездротового зв'язку з персоналом, що знаходиться поблизу призначеного місцеположення монтажу елемента футерівки від спрацювання або від опорної поверхні на стінці. Оператор крана приймає команди і інформацію відносно того, як повинен бути орієнтований елемент футерівки від спрацювання, щоб монтажні отвори елемента футерівки від спрацювання були розташовані на одній лінії і по центру монтажних отворів стінки. З метою забезпечення інформації, необхідної для забезпечення оператору крана можливості зведення разом допоміжних засобів з'єднання в монтажних отворах елемента футерівки від спрацювання, персонал повинен знаходитися в небезпечній близькості від місцеположення монтажу і, в певних випадках, під елементом футерівки від спрацювання, що звисає зі стріли крана. Потрібно усвідомлювати, що ця операція є надто ризикованою хоч би тому, що секції футерівки від спрацювання, чия заміна здійснюється, звичайно є дуже важкими. Першою метою даного винаходу є забезпечення системи керування і позиціонування, що вирішує проблеми, описані вище, і що робить можливим виконання, способом, який є безпечнішим для персоналу і дієвішим, заміни спрацьованих футерівок барабанів на схильних до спрацьовування стінках, зокрема, для обертових барабанних млинів. Особливе прагнення направлене на забезпечення системи керування і позиціонування, що забезпечує персоналу відсутність необхідності роботи під стрілою крана, з якої звисають секції футерівки, як було описано вище. Це досягається за допомогою системи керування і позиціонування, що демонструє ознаки і характеристики, специфіковані в п. 1 формули винаходу. Другою метою даного винаходу є забезпечення системи, яка робить можливим виконання оновлення і заміни футерівок від спрацювання без необхідності для оператора крана бути присутнім на місці операції з футерівкою. Завдяки виконанню двовимірного датчика на зовнішній поверхні стінки, тобто, на протилежній стороні стінки, видимій з боку спрацювання монтажної поверхні, таким способом, щоб поле огляду датчика містило нижню сторону елемента футерівки від спрацювання, видиму через монтажні отвори, а також завдяки виконанню датчика з можливістю випромінювання електричного сигналу, що представляє зображення взаємного розташування першої опорної системи Rv, представленої за допомогою монтажних отворів стінки, і другої опорної системи, представленої за допомогою засобів з'єднання, розташованих на нижній поверхні елемента футерівки від спрацювання, яка може, звичайно, також включати в себе звичайні монтажні отвори, можливим є визначення монтажного положення елемента футерівки від спрацювання простим і дієвим способом, і, таким чином, спрямування елемента футерівки від спрацювання в його місцеположення монтажу на стінці. Є доцільним, щоб двовимірний датчик містив дві камери, які передають зображення, виконані стаціонарно відносно першої опорної системи Rv, так щоб лінії видимості від зовнішньої поверхні кожуха барабана цих датчиків проходили через монтажні отвори подрібнювального барабана. Компонентом системи є блок обробки зображень, причому блок здійснює перетворення сигналу в двовимірне або тривимірне представлення на блоці відображення, за допомогою якого оператору крана в режимі реального часу може бути представлена інформація про положення так, щоб оператор крана міг направляти і здійснювати маневрування підіймальним пристроєм і таким способом приводити елемент футерівки від спрацювання в його монтажне положення на стінці. Оператор крана може таким способом бачити "поле огляду камери" і, таким чином, за допомогою прийому інформації в режимі реального часу, може оглядати нижню поверхню елемента футерівки від спрацювання на моніторі за допомогою використання прямої інформації від блока відображення з метою точного позиціонування елемента футерівки від спрацювання на його місце на опорній поверхні внутрішньої поверхні подрібнювального барабана так, щоб засоби з'єднання, присутні на нижній 2 UA 116084 C2 5 10 15 20 25 30 35 40 45 50 55 поверхні елемента футерівки від спрацювання, розташовувалися по центру у відповідному монтажному отворі в стінці. У альтернативному виконанні, можливо, щоб фактична процедура спрямування або позиціонування могла відбуватися автоматично, на основі інформації, що приймається від блока обробки зображень системи, за допомогою чого особливо відповідальні операції під час заміни футерівок від спрацювання можуть бути автоматизованими. Коли оператора крана задовольняє положення, за допомогою натиснення кнопки на блоці керування активується функція позиціонування. Камера далі здійснює захоплення зображення хрестика на панелі і обчислює положення його центра і його відстань за допомогою лазерних пучків, за допомогою чого мікропроцесор обчислює, відомим способом, необхідні дані і спрямовує підіймальний пристрій, і, таким чином, також елемент футерівки від спрацювання, на місце. У одному іншому виконанні є можливим, щоб інформація, що стосується положень засобів з'єднання відносно монтажних отворів, як доповнення до чисто візуальної інформації, яку оператор крана приймає від зображень в моніторі, може бути тактильною, або може бути аудіовізуальною, при якій зображення, що відображається на моніторі, відповідає тактильній або аудіовізуальній інформації. Одна з основних переваг даної системи керування і позиціонування полягає в тому, що значно полегшується вирівнювання елемента футерівки від спрацювання з монтажними отворами опорної поверхні, і, зокрема, за допомогою цього зникає необхідність для персоналу бути присутнім в безпосередній близькості від елемента футерівки від спрацювання під час фактичної роботи по вирівнюванню і позиціонуванню. Все позиціонування може здійснюватися з високою точністю на безпечній відстані від місця монтажу. Як альтернативний варіант, для оператора крана може бути можливою робота з використанням дистанційного керування і блока зовнішнього зв'язку в системі, в якій передача даних здійснюється в двох напрямках через, наприклад, Інтернет або мережу WLAN, за допомогою чого є доцільним, щоб один одиничний досвідчений оператор крана міг здійснювати керування одним або декількома підіймальними пристроями або маніпуляторами для маніпулювання елементами футерівки від спрацювання зі значно віддаленого місцеположення. Зниження витрат і збільшення ефективності, які можуть бути отримані в останньому випадку, є очевидними, оскільки для досвідченого оператора крана відсутня необхідність переміщуватися на місце, таке як шахта, де, наприклад, розташована дробарка руди, але замість цього з'являється можливість здійснювати маневрування підіймальним пристроєм бездротовим способом з віддаленого термінала. Нижче буде більш детально описаний один варіант здійснення винаходу з посиланням на прикладені креслення, в яких: фіг. 1 демонструє вигляд в поперечному перерізі частини звичайної дробарної установки з виконаним в цій установці підіймальним пристроєм, причому в підіймальному пристрої, з метою позиціонування елемента футерівки від спрацювання, оператор використовує систему керування і позиціонування відповідно до даного винаходу; фіг. 2 демонструє зображення в розібраному вигляді в перспективі частини подрібнювального барабана з системою керування і позиціонування відповідно до даного винаходу під час позиціонування елемента футерівки від спрацювання на опорній поверхні внутрішньої поверхні барабана, тобто схильній до спрацювання, а також монтаж елемента футерівки від спрацювання за допомогою з'єднувальних болтів, які, проходячи через монтажні отвори в кожусі подрібнювального барабана, призначені бути закріпленими із зовнішньої поверхні барабана, тобто поверхні, відомої як "поверхня натягнення"; фіг. 3 демонструє вигляд в перспективі захисного корпусу для камери для запису зображень і джерела освітлення, що є компонентом системи керування і позиціонування відповідно до даного винаходу; фіг. 4 демонструє вигляд в перспективі цифрової камери для запису зображень з її асоційованим джерелом освітлення в формі світлодіодів LED, які розподілені навколо об'єктиву камери і є компонентами системи керування і позиціонування відповідно до даного винаходу; фіг. 5 демонструє структурну діаграму системи керування і позиціонування відповідно до даного винаходу, призначену до використання на підіймальному пристрої для маніпулювання елементами футерівки від спрацювання з метою полегшення заміни футерівки від спрацювання в здатному до обертання подрібнювальному барабані; фіг. 6a і фіг. 6b демонструють комп'ютерні зображення так, як їх бачить оператор крана, і розділені на сеанси з використанням системи DualScreen, в якій кожне зображення було створене, відповідно, за допомогою першої і другої камер для запису зображень, які є компонентами системи керування і позиціонування відповідно до даного винаходу; 3 UA 116084 C2 5 10 15 20 25 30 35 40 45 50 55 60 фіг. 7a по фіг. 7c схематично демонструють в одному прикладі взаємно різні кутові положення, які можуть виникати між двома монтажними отворами, включеними в фіксовану першу опорну систему Rv, що визначається за допомогою стінки кожуха (площина X/Y) подрібнювального барабана, і двома засобами з'єднання, які є компонентами рухомої другої опорної системи Rs, що визначається за допомогою елемента футерівки від спрацювання, над яким здійснюються маніпуляції за допомогою підіймального пристрою, за допомогою чого: a) два засоби з'єднання елемента футерівки від спрацювання розміщуються своїми подовжніми осями перпендикулярно до площини X/Y, b) два засоби з'єднання елемента футерівки від спрацювання розміщуються своїми подовжніми осями під кутом 25° до площини X/Y, і c) два засоби з'єднання елемента футерівки від спрацювання розміщуються своїми подовжніми осями під кутом -25° до площини X/Y; фіг. 8a по фіг. 8c схематично демонструють приклад того, як може з'являтися графічне двовимірне зображення, тобто сеанси зі структурою DualScreen, що представляються оператору крана за допомогою монітора при різних умовах кутового положення між двома з монтажних отворів стінки кожуха і двома з протилежних засобів з'єднання елемента футерівки від спрацювання, відповідних фіг. 7a по фіг. 7c, за допомогою чого: a) засоби з'єднання розташовуються по центру в монтажних отворах, тобто, засоби з'єднання є перпендикулярними площині X/Y, b) засоби з'єднання розташовуються похило під кутом до монтажних отворів, тобто, засоби з'єднання знаходяться під кутом 25° до площини X/Y, c) засоби з'єднання розташовуються похило під кутом до монтажних отворів, тобто, засоби з'єднання знаходяться під кутом -25° до площини X/Y; фіг. 9 демонструє систему для операції дистанційного керування, що виконується крановий пристроєм, яка при виконанні заміни футерівки від спрацювання в дробарці використовує геометричну інформацію з метою визначення розміру кутових положень між різними опорними системами Rv, Rs в системі керування і позиціонування відповідно до даного винаходу. Фіг. 1 демонструє поперечний переріз частини звичайного подрібнювального барабана 1 з оточуючою стінкою в формі кожуха 2 з листового металу, який є схильним до спрацювання, причому використання подрібнювального барабана здійснюється під час дроблення і розмелювання руди 3 в дробарці руди. Перший оператор 5, оператор крана, розташовується всередині барабана, в той час як другий оператор 6 розташовується зовні барабана. Даний оператор 5 і даний оператор 6 можуть здійснювати один з одним зв'язок бездротовим способом за допомогою, наприклад, мобільного телефону або радіозв'язку. Внутрішня футерівка барабана на барабанному млині 1 згаданого типу формується з множини елементів 10 футерівки від спрацювання, відомих як "пластини кожуха", які розташовані поруч один з одним. Кожний елемент 10 футерівки від спрацювання має підіймальні вушка 1, виконані для взаємодії з гаковим захоплювачем 12, розташованим на вільному кінці підіймального пристрою 14, який був вставлений в подрібнювальний барабан 1. Елемент 10 футерівки від спрацювання демонструє верхню поверхню 15, повернену всередину в напрямку центра подрібнювального барабана 1, виготовлену з матеріалу, стійкого до спрацювання, такого як, наприклад, зносостійка гума, і нижню поверхню 16 з металу, з'єднану за допомогою вулканізації зі згаданою зносостійкою гумою. Оскільки дробарки руди типу, що розглядається, звичайно працюють цілодобово, заміна елементів 10 футерівки від спрацювання повинна здійснюватися з регулярними інтервалами. Для цієї мети елементи 10 футерівки від спрацювання оснащені засобами з'єднання, що звичайно позначаються позицією 17, які, у варіанті здійснення, що описується тут, містять нарізні отвори 19 з асоційованими напрямними штифтами, які можуть розкріплюватися. Опорне позначення 17' звичайно використовується для позначення допоміжних засобів з'єднання, призначених для монтажу, причому засоби є представленими елементами, відомими як "болтові з'єднання", в формі гвинтів 18, що забезпечуються з головкою 20 і призначені вставлятися від зовнішньої поверхні кожуха барабана через монтажні отвори 21 в кожусі 2 з листового металу подрібнювального барабана 1, щоб угвинчуватися на місце в нарізних отворах 19 в елементі футерівки від спрацювання. Таким чином, ця система з'єднання, по суті, являє собою систему типу, відомого з документа SE 531 347 C2. Тут потрібно розуміти, що вираз "засоби 17 з'єднання" використовується для позначення якого-небудь будь-якого відомого типу з засобів з'єднання, якими може бути оснащений елемент 10 футерівки від спрацювання, тобто не тільки нарізних отворів з асоційованими напрямними штифтами типу, описаного в даному варіанті здійснення, а також в згаданому вище документі, але також більш простих систем типу "гвинт-гайка", відомого як "крізні болти", за 4 UA 116084 C2 5 10 15 20 25 30 35 40 45 50 55 60 допомогою яких елементи футерівки від спрацювання забезпечуються разом з простими монтажними отворами. Елементи 10 футерівки від спрацювання розташовуються по центру відносно монтажних отворів 21 в кожусі 2 з листового металу, після чого вони кріпляться до поверхні на внутрішній поверхні кожуха вгвинчуванням за допомогою згаданих гвинтів 18 від зовнішньої поверхні кожуха 2 з листового металу, тобто, від поверхні, відомої як "поверхня натягнення". Цей тип елемента 10 футерівки від спрацювання є дуже важким і важким для маніпулювання, і, навіть якщо оператор крана, тобто перший оператор 5 на кресленні, є кваліфікованим, існують великі складності в позиціонуванні і підгонці кожного окремого елемента 10 футерівки від спрацювання так, щоб засоби 17 з'єднання на нижній поверхні елемента 10 футерівки від спрацювання розташовувалися по центру відносно кожного з'єднувального отвору 21, перш ніж елемент футерівки від спрацювання міг бути опущений на місце і зафіксований за допомогою допоміжних засобів 17' з'єднання із зовнішньої поверхні барабана другим оператором 6, працюючим зовні подрібнювального барабана 1. На фіг. 1 продемонстрований підіймальний пристрій 14 з крановим виконанням, який працює всередині подрібнювального барабана 1. Захоплювач 12, виконаний на кінці підіймального пристрою 14, є відомим способом оснащеним штифтами або гаками (на кресленнях не продемонстровані), які можуть вставлятися в підіймальні вушка 11 елемента 10 футерівки від спрацювання. Коли згадані гаки були вставлені в підіймальні вушка 12, елемент 10 футерівки від спрацювання може переноситися в утримувальному положенні за допомогою підіймального пристрою 14 і може цим способом вільно піддаватися маніпулюванню і позиціонуванню всередині дробарки. Рух підіймального пристрою 14 керується і відстежується за допомогою засобів 14а керування і привідного механізму, звичайно керованих гідравлічно, таких як гідравлічні циліндри, але може в альтернативному варіанті бути представленим електричними сервоприводами. Керування засобами керування і привідним механізмом підіймального пристрою 14 здійснюється за допомогою блока 14b керування, такого як блок вентиля керування з гідрорознімами і за допомогою впливу блока 20 керування за допомогою керуючих і напрямних важелів, які перший оператор 5, який працює всередині подрібнювального барабана, що переміщується разом з підіймальним пристроєм як машиніст, має перед собою на місці керування. Перший оператор 5, який працює всередині подрібнювального барабана 1, таким чином, переміщується разом з підіймальним пристроєм 14 і, таким чином, здійснює керування його різними рухами за допомогою блока 20 керування. Блок 20 керування оснащений необхідними кнопками і ручками, які, за допомогою свого впливу і установки, спонукають підіймальний пристрій 14 виконувати бажані рухи. За допомогою підіймального пристрою 14 елемент футерівки може переміщатися по суті вільно в просторі або щонайменше з двома або трьома ступенями свободи поступального руху в просторі, тобто, в напрямах х, у і z, і за допомогою деякої кількості обертальних ступенів свободи також може звичайно здійснюватися керування його кутом нахилу, наприклад, кутом бічного нахилу, кутом подовжнього нахилу і кутом ковзання захоплюючого пристрою. [Пропущений текст: "Це може бути описано як"] перший кут , що визначається в площини xy, другий кут , що визначається в площини yz, і третій кут γ, що визначається в площині xz. З метою забезпечення можливості заміни спрацьованих футерівок барабанів у обертових барабанних млинах 1 більш дієвим і безпечним способом, система 30 керування і позиціонування, відповідно до даного винаходу, виконана з можливістю роботи спільно з підіймальним пристроєм 14. Система 30 керування і позиціонування полегшує, зокрема, здійснення керування і позиціонування кранового пристрою 14 в режимі реального часу за допомогою першого оператора 5, розташованого всередині подрібнювального барабана 1 таким способом, щоб елемент 10 футерівки від спрацювання розташовувався точно в правильному місці на опорній поверхні у внутрішній поверхні кожуха 2 з листового металу. Вираз "на місці" використовується нижче для позначення нижченаведеного: що засоби 17 з'єднання елемента 10 футерівки від спрацювання, причому засоби з'єднання оснащені внутрішньою різзю, розташовуються по суті по центру відносно відповідного монтажного отвору 21 в листовому металі 2 кожуха так, що для з'єднання з натягненням елемента футерівки від спрацювання, допоміжні засоби 17' з'єднання в формі гвинтів 18 можуть вставлятися за допомогою проходження через монтажні отвори 21 і вгвинчування в засоби 17 з'єднання в формі нарізних отворів 19 елемента 10 футерівки від спрацювання. Термін "реальний час" використовується для позначення, що перший оператор 5, який керує підіймальним пристроєм, приймає, по суті, без якої-небудь затримки у часі, тобто, вмить, інформацію про положення елемента 10 футерівки від спрацювання відносно призначеного місцеположення монтажу на опорній поверхні внутрішньої поверхні кожуха барабана. 5 UA 116084 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 2, відповідно до даного винаходу, більш детально демонструє систему 30 керування і позиціонування, за допомогою якої за допомогою монтажних отворів 21 кожуха барабана 2 визначається перша опорна система Rv, а друга опорна система Rs формується за допомогою засобів 17 з'єднання, розташованих на нижній поверхні елемента 10 футерівки від спрацювання в формі отворів 19, забезпечених внутрішніми різями. Система 30 керування і позиціонування додатково містить засіб спостереження, який, на основі двох опорних систем Rv, Rs, робить для оператора крана 5, що здійснює маневрування підіймальним пристроєм 14, більш легким напрямок у бік певного місцеположення монтажу на внутрішній поверхні кожуха з листового металу. Даний засіб спостереження системи керування і позиціонування містить двовимірний датчик в формі першої і другої камер 31, 31' для запису зображень. Кожна така камера 31, 31' для запису зображень належить до типу, в якому зображення експонуються на цифровому датчику зображень і передаються як електричні сигнали, що представляють потік статичних зображень або послідовностей зображень взаємного розташування першої і другої опорних систем Rv, Rs. На кожній камері 31, 31' для запису зображень, в формі джерела світла 32 зі світлодіодами LED, рівномірно розподіленими по колу навколо об'єктиву 33 камери 31, 31' для запису зображень (фіг. 4), виконане джерело освітлення. Фіг. 3 більш детально демонструє корпус 34 камери, який може відкриватися, в який можуть вставлятися і фіксуватися кожна зі згаданих камер 31, 31' для запису зображень і її асоційованого джерела світла 32. Засоби 35 з'єднання присутні на передньому кінці корпусу 34 камери в формі магнітного з'єднання, за допомогою якого корпус камери може бути змонтований способом, що надає можливість її знімання, на зовнішній поверхні листового металу 2 кожуха подрібнювального барабана 1 так, щоб дві камери 31, 31' для запису зображень були стаціонарно фіксовані відносно першої опорної системи Rv способом, продемонстрованим на фіг. 2. Між корпусом 34 камери і засобом 35 з'єднання, розташованим на передньому кінці, проходить проміжна трубчаста частина 36a, і на коротку відстань уперед від засобу 35 з'єднання виступає напрямна 36b в формі кільця. Об'єктив 33 камери 31, 31' для запису зображень призначений проходити на коротку відстань в задню частину трубчастої частини 36a, за допомогою чого згадана частина формує приймаюче відділення для об'єктиву. Трубчаста напрямна 36b, яка виступає уперед від засобу 35 з'єднання, отримала зовнішній діаметр, вибраний таким чином, щоб вона могла вставлятися як контактний вимірювальний наконечник в монтажний отвір 21 в листовому металі 2 кожуха. Трубчаста напрямна 36 прикріплюється на корпусі 34 камери за допомогою штикового затвора або схожим способом, що надає можливість її знімання, за допомогою чого корпус камери може просто забезпечуватися трубчастими напрямними 36 з різними зовнішніми діаметрами з метою забезпечення можливості їх підгону до кожухів 2 барабанів з монтажними отворами різних внутрішніх діаметрів. На передньому кінці трубчастої напрямної 36b корпусу 34 камери існує отвір 37, який, коли трубчаста напрямна була вставлена на певну відстань в монтажний отвір 21 в кожусі 2, не тільки надає можливість прийому і проектування зображень на цифрові датчики зображень камер 31, 31' для запису зображень, що знаходяться всередині корпусу камери, але також надає можливість світлу в формі пучків від джерела світла 32 виходити з корпусу камери з метою освітлення мети, представленої за допомогою нижньої поверхні елемента 10 футерівки від спрацювання. У той час як дві камери 31, 31' для запису зображень є фіксованими в положенні відносно першої опорної системи Rv (за допомогою монтажних отворів 21) з полем огляду, представленим за допомогою засобів 17 з'єднання, розташованих на нижній поверхні елементів 10 футерівки від спрацювання, друга опорна система Rs для системи виходить за допомогою відповідної обробки зображень електричного сигналу, що представляє зображення згаданої мети, такої як, наприклад, двовимірне зображення. Це двовимірне зображення робить для оператора крана можливим інтерпретування, в режимі реального часу, взаємного розташування двох опорних систем Rv, Rs, тобто взаємного розташування монтажних отворів 21 листового металу 2 кожуха і засобів 17 з'єднання, розташованих на нижній поверхні елемента 10 футерівки від спрацювання. Через використання растеризації зображень і різних типів геометричних форм об'єктів, виникаючих між двома опорними системами Rv, Rs, тобто через порівняння цільових значень з фактичними значеннями для проектованих поверхонь, для кваліфікованого оператора крана є можливим зробити висновки про взаємне розташування двох опорних площин (їх характеристики), і як повинно здійснюватися маневрування підіймальним пристроєм з метою розташування засобів 17 з'єднання елемента 10 футерівки від спрацювання і, таким чином, також опорної системи Rs, по центру відносно першої опорної системи Rv. Відповідно до даного винаходу, взаємне розташування двох опорних систем Rv, Rs визначається в присутності потоку світла, яке виробляється за допомогою джерела світла 32. 6 UA 116084 C2 5 10 15 20 25 30 35 40 45 50 55 Потрібно розуміти, що, з метою зробити взаємне розташування двох опорних систем Rv, Rs видимим в камері для запису зображень, можуть використовуватися інші відповідні джерела освітлення, такі як світло лазера або інфрачервоне світло. Фіг. 4 більш детально демонструє камеру 31, 31' для запису зображень, за допомогою чого стає зрозумілим, що об'єктив 33 містить візирні лінії 38, що формують початкову точку в центрі монтажного отвору 21. Завдяки джерелу світла 32, візирні лінії 38 формують освітлену опорну точку, мета якої буде більш детально описана нижче. Кожна камера 31, 31' для запису зображень і кожне джерело світла 32 виконується в корпусі 34 камери таким чином, щоб при засобах 35 з'єднання, змонтованих над одним з монтажних отворів 21 подрібнювального барабана, камера 31, 31' для запису зображень мала свої лінії видимості поверненими в центр подрібнювального барабана, або - якщо висловитися іншими словами - вона "дивилася" всередину в напрямку центра. Джерело світла 32 схожим способом проектує пучок 40 через монтажний отвір 21, який проходить через нижню поверхню 16 елемента 10 футерівки від спрацювання, який піддається маніпулюванню за допомогою підіймального пристрою 14 всередині подрібнювального барабана 1. Фіг. 5 більш детально роз'яснює, що кожна камера 31, 31' для запису зображень з'єднана, за допомогою блока 42 обробки зображень, з монітором 44, що приймає і проектує сигнали зображень від двох камер 31, 31' для запису зображень. Зв'язок між згаданими блоками може досягатися будь-яким відповідним способом, наприклад, через мережі і бездротові лінії зв'язку, з однією або декількома точками доступу в формі елементів, відомих як базові радіостанції, виконані всередині області шахти з деякою кількістю працюючих дробарок. Інформація про зображення може передаватися по бездротовому зв'язку за допомогою Інтернету або мережі WLAN на дуже великі відстані, навіть між різними частинами світу, за допомогою чого для одного досвідченого оператора крана, використовуючи зовнішній зв'язок, може бути можливим здійснювати дистанційне керування з оперативної бази одним або деякою кількістю підіймальних пристроїв 14 або маніпуляторів під час заміни футерівок від спрацювання на далеко розташованих об'єктах гірничодобувного комплексу. У варіанті здійснення, що описується тут, перший оператор 5, який працює всередині подрібнювального барабана 1, переміщується разом з підіймальним пристроєм 14 і здійснює керування його різними рухами за допомогою блока 20 керування. Є перевагою, якщо монітор 44 може бути адаптований з можливістю відображення для оператора 5 стереотаксичних зображень від кожної однієї з двох камер 31, 31' для запису зображень, використовуючи в той же самий час те, що відоме як "розділений екран". Висловлюючись інакше, на DualScreen формуються сеанси із зображеннями 44a, 44b від першої і другої камер 31, 31' для запису зображень, відповідно. Оскільки відомо, що потрібні дві опорні точки або опорні дані з метою спрямування об'єкта в конкретне положення на площині, тобто, на площині опорної поверхні для елемента 10 футерівки від спрацювання, яку формує внутрішня поверхня кожуха 2 з листового металу подрібнювального барабана 1, потрібно усвідомлювати, що є перевагою, якщо на моніторі 44 можуть бути стереотаксично, тобто способом, проілюстрованим на фіг. 6a і фіг. 6b, продемонстровані обидва зображення камери 44a, 44b. Опорні точки позначаються на фіг. 6a і фіг. 6b кожна за допомогою візирних ліній 38, в той час як кожна мета позначається за допомогою засобів 17 з'єднання. Як наслідок стереотаксичних зображень, що передаються монітором в який-небудь будь-який момент через зображення 44a, 44b двох камер (фіг. 6a, фіг. 6b), що отримуються на моніторі 44, інтегрованому в блок 20 керування, перший оператор 5 здатний швидко локалізовувати точне місцеположення на кожусі 2 з листового металу для елемента 10 футерівки від спрацювання і положення, в якому дві опорні системи Rv і Rs лежать по центру одна відносно одної з їх площинами X/Y, що проходять паралельно. Висловлюючись іншими словами, оператор може локалізовувати положення, при якому два з засобів 17 з'єднання елемента 10 футерівки від спрацювання розташовуються по центру відносно відповідних монтажних отворів 21 в кожусі 2, і при якому засоби 17 з'єднання елемента 10 футерівки від спрацювання є перпендикулярними до площини X/Y. Таким чином, візирні лінії 44 формують в моніторі 44 опорну систему, яка вимагається першим оператором 5, керуючим краном. Через керування важелями і ручками блока 20 керування елемент 10 футерівки від спрацювання, що підтримується за допомогою підіймального пристрою 14, позиціонується на місці, так що два з його засобів 17 з'єднання розташовуються по центру відносно відповідного монтажного отвору 21 в листовому металі 2 кожуха, після чого елемент футерівки від спрацювання опускається на місце. Другий оператор 6 закріплює елемент 10 футерівки від спрацювання на внутрішній поверхні подрібнювального барабана за допомогою гвинтів 18, які вставляються через монтажні отвори 21 і угвинчуються в 7 UA 116084 C2 5 10 15 20 25 30 35 40 45 50 55 60 засіб 17 з'єднання елемента футерівки від спрацювання із зовнішньої поверхні (поверхні натягнення) подрібнювального барабана 1. Фіг. 7 схематично демонструє різні кутові положення, які можуть виникати між двома монтажними отворами 21, включеними в фіксовану першу опорну систему Rv, що визначається за допомогою стінки 2 кожуха (площина X/Y) подрібнювального барабана, і двома засобами 17 з'єднання (схематично відображеними тут як циліндри), які є компонентами рухомої другої опорної системи Rs, що визначається за допомогою елемента 10 футерівки від спрацювання, що піддається маніпулюванню за допомогою підіймального пристрою 14. Два засоби 17 з'єднання елемента 10 футерівки від спрацювання на фіг. 7a розміщуються подовжніми осями перпендикулярно до площини X/Y, що визначається за допомогою монтажних отворів 21 пластини 2 кожуха. Два засоби 17 з'єднання елемента 10 футерівки від спрацювання на фіг. 7b розміщуються подовжніми осями під кутом 25° до площини X/Y, що визначається за допомогою монтажних отворів 21 пластини 2 кожуха. Два засоби 17 з'єднання елемента 10 футерівки від спрацювання на фіг. 7c розміщуються подовжніми осями під кутом -25° до площини X/Y. Фіг. 8 схематично демонструє різні кутові положення, які можуть виникати між двома опорними системами Rv, Rs, також проілюстрованими на фіг. 7а по фіг. 7c, але в цьому випадку продемонстрованими на основі поля огляду двовимірного датчика 31, 31'. Таким чином, на фіг. 8a по фіг. 8c проілюстровані способи, якими дві камери 31, 31' для запису зображень бачать засоби 17 з'єднання елемента 10 футерівки від спрацювання через монтажні отвори 21 і геометричні зображення, що представляються в формі двовимірного зображення 44a, 44b оператору крана на блоці 44 відображення або монітора на місці експлуатації підіймального пристрою 14 (див. також фіг. 5). Зображення від кожної з камер 31, 31' позначаються a1-c1 і a2c2, відповідно. Схожим способом зі способом, описаним вище, фіг. 8a демонструє положення, при якому два засоби 17 з'єднання елемента 10 футерівки від спрацювання розташовуються подовжніми осями перпендикулярно до площини X/Y, що визначається за допомогою монтажних отворів 21 пластини 2 кожуха. Два засоби 17 з'єднання елемента 10 футерівки від спрацювання на фіг. 8b розміщуються подовжніми осями під кутом 25° до площини X/Y, що визначається за допомогою монтажних отворів 21 пластини 2 кожуха. Два засоби 17 з'єднання елемента 10 футерівки від спрацювання на фіг. 8c розміщуються подовжніми осями під кутом 25° до площини X/Y. Як було описано вище, елемент 10 футерівки від спрацювання може переміщуватися за допомогою підіймального пристрою 14 по суті вільно в просторі або щонайменше при двох або трьох ступенях свободи поступального руху в просторі, тобто в напрямках х, у і z, і за допомогою деякої кількості обертальних ступенів свободи також звичайно може здійснюватися керування його кутом нахилу, наприклад, кутом бічного нахилу, кутом подовжнього нахилу і кутом ковзання. Під керуванням послідовності зображень від блока 44 відображення, тобто монітора, який оператор крана 5 має на місці експлуатації, оператор може спрямовувати і маневрувати елементом футерівки від спрацювання до його місцеположення, після чого той опускається і фіксується на місці із зовнішньої поверхні барабана, тобто, з боку монтажу. Фіг. 9 демонструє систему, що надає можливість дистанційного керування системою керування і позиціонування, яка була описана вище, і яка робить можливим для досвідченого і кваліфікованого оператора крана 5 здійснення роботи з використанням дистанційного керування в системі, в якій передача даних здійснюється через, наприклад, Інтернет або мережа WLAN. Цим способом робиться можливим виконання оновлення і футерівки дробарок без необхідності наявності на місці кваліфікованого персоналу, за допомогою чого досвідчений оператор крана може бути здатний, за допомогою даної системи керування і позиціонування, здійснювати дистанційне керування ззовні одним або декількома підіймальними пристроями або маніпуляторами всередині різних дробарок в різних місцях світу. Система, що надає можливість цього, містить підіймальний пристрій 14, оснащений блоком 14b керування, тобто блоком вентиля керування, що надає можливість дистанційного керування за допомогою блока 20b керування, що містить важелі спрямування і керування. Гідравлічні системи, що надають можливість дистанційного керування, звичайно включають в себе передавачі і приймачі, де сигнали керування, в формі інфрачервоного випромінювання, передаються як електричні команди керування на керування в блоці 14b керування машини і добре відомі протягом тривалого часу, і, внаслідок цього, не будуть описуватися більш детально. Дана система містить, крім всього іншого, блок 42 обробки зображень, призначений приймати зображення від першої і другої камер 31, 31', модуль 108 бездротового зв'язку, бездротовий пристрій 60 спільного використання протоколів IP (де "IP" є скороченням терміну "Інтернет-протокол"), а також віддалене робоче місце для оператора, що містить комп'ютерний термінал 120, сполучений з Інтернетом 100, і для якого був виділений блок 20b керування, що містить важіль 8 UA 116084 C2 5 10 15 20 25 керування (ручку керування "джойстик") для здійснення маневрування крановим пристроєм 4. Сигнали зображень, виконаних двома камерами 31, 31', посилаються на блок 42 обробки зображень і, після обробки в цьому блоці, посилаються як сигнал зображення через модуль 108 бездротового зв'язку і бездротового блок 60 спільного використання протоколів IP. Модуль бездротового зв'язку приймає також сигнали керування від комп'ютерного термінала 120 і системи 20b керування для блока 14b керування і, таким чином, команди для здійснення маневрування і спрямування підіймального пристрою 14. Двостороння передача даних, таким чином, здійснюється через Інтернет 100. Модуль 108 бездротового зв'язку може являти собою бездротовий адаптер USB або карту бездротового LAN, сумісну для використання з бездротовим пристроєм 60 спільного використання протоколів IP. Сигнали керування для блока 14s керування задаються за допомогою команд 120 з клавіатури на комп'ютерному терміналі в комбінації з командами від ручки керування "Джойстик" через важіль 20b керування, за допомогою чого ці команди приймаються за допомогою модуля 60 спільного використання протоколів IP з метою їх передачі далі в керування 14a системою через модуль 108 зв'язку. Бездротовий пристрій 60 спільного використання протоколів IP, таким чином, з'єднаний з лінією 120 Інтернету з метою не тільки скачування даних зображення від камер 31, 31', але також з метою передачі сигналів керування на засоби 14a керування і привідного механізму підіймального пристрою 14. Оператор крана 5, що сидить перед комп'ютерним терміналом 120, 20, будучи в той же самий час географічно віддаленим від місця знаходження, наприклад, дробарки 1, може, таким чином, за допомогою важеля 20b керування, здійснювати керування всіма рухами підіймального пристрою 14 за допомогою геометричних образів між тими двома, які є відображеними на моніторі 44, від кожної з двох камер 31, 31' для запису зображень і двох опорних систем Rv і Rs. Даний винахід не обмежується до того, що було описано вище і продемонстроване на кресленнях: він може змінюватися і модифікуватися декількома різними способами в межах об'єму новаторської ідеї, визначеної за допомогою прикладеної патентної формули винаходу. ФОРМУЛА ВИНАХОДУ 30 35 40 45 50 55 60 1. Система керування і позиціонування для позначення монтажного положення змінного елемента (10) футерівки від спрацювання на поверхні стінки (2), схильній до спрацювання, яка може бути утворена, наприклад, внутрішньою поверхнею обертового барабана (1) на дробарці руди, і де елемент футерівки від спрацювання підтримується на вільному кінці здатної до маневрування стріли, яка є компонентом підіймального пристрою (14), керованого під час здійснення маніпулювання елементом футерівки від спрацювання під час здійснення оператором (5) крана операції монтажу, за допомогою чого забезпечується стінка з набором монтажних отворів (21), а елемент футерівки від спрацювання оснащується на своїй нижній поверхні засобами (17) з'єднання, за допомогою яких елемент футерівки від спрацювання закріплюється на поверхні за допомогою допоміжних засобів (17') з'єднання, що вставляються через монтажні отвори, яка відрізняється тим, що містить: стінку (2), яка містить монтажні отвори (21), які утворюють першу систему (Rv) орієнтування, елемент (10) футерівки від спрацювання, що містить засоби (17) з'єднання, розташовані на нижній поверхні цього елемента і формують другу систему (Rs) орієнтування, двовимірний датчик (31, 31'), розташований стаціонарно на зовнішній поверхні стінки (2), яка розташована на стороні стінки монтажної поверхні, протилежній схильній до спрацьовування стороні, таким чином, щоб поле огляду датчика містило нижню поверхню елемента (10) футерівки від спрацювання, що проглядається через монтажні отвори (21), причому датчик виконаний з можливістю передачі електричного сигналу, що представляє зображення взаємного розташування першої і другої систем (Rv, Rs) орієнтування, і під керуванням цього зображення оператором (5) крана може визначатися монтажне положення елемента (10) футерівки від спрацювання на стінці. 2. Система керування і позиціонування за п. 1, в якій двовимірний датчик (31, 31') містить дві камери для запису зображень, безпечно прикріплені до першої системи (Rv) орієнтування таким способом, щоб їх поля огляду містили засоби з'єднання (17), розташовані на нижній поверхні елемента (10) футерівки від спрацювання, видимі через монтажні отвори (21). 3. Система керування і позиціонування за п. 2, яка додатково містить блок (42) обробки зображень, який перетворює електричний сигнал від камер (31, 31') для запису зображень в графічне двовимірне зображення (44а, 44b), і блок (44) відображення, за допомогою якого оператору (5) крана в режимі реального часу може бути представлене зображення так, щоб оператор (5) крана міг спрямовувати і здійснювати маневрування підіймальним пристроєм і 9 UA 116084 C2 5 10 15 20 25 30 35 таким чином приводити елемент (10) футерівки від спрацювання в його монтажне положення на стінці (2). 4. Система керування і позиціонування за будь-яким із пунктів 1-3, що містить джерело освітлення (32), виконане з можливістю випромінювання світла від зовнішньої поверхні стінки (2) через монтажні отвори (21) або отвори стінки в напрямку до нижньої поверхні елемента (10) футерівки від спрацювання. 5. Система керування і позиціонування за будь-яким із пунктів з пунктів 1-4, в якій двовимірний датчик (31, 31') містить напрямну (36b) в формі кільця для вставлення як контактний вимірювальний наконечник в монтажні отвори (21) стінки (2) для геометричного визначення геометричного положення першої системи (Rv) орієнтування. 6. Система керування і позиціонування за п. 5, що містить корпус (34), в якому розміщено камеру (31, 31') для запису зображень і джерело освітлення (32), і корпус якої оснащений на передньому кінці напрямною (36b) в формі кільця і засобом (35) з'єднання, що надає корпусу можливість бути змонтованим на зовнішній поверхні стінки (2) в поєднанні з монтажним отвором (21), способом, що надає можливість його знімання. 7. Система керування і позиціонування за п. 6, в якій засіб (35) з'єднання містить магнітне з'єднання. 8. Система керування і позиціонування за будь-яким із пунктів 4-7, в якій кожна камера (31, 31') для запису зображень містить об'єктив (33), на якому виконане джерело освітлення (32) як набір світлодіодів LED, розподілених по колу об'єктива (33). 9. Система керування і позиціонування за будь-яким із пунктів 1-7, яка додатково містить підіймальний пристрій (14) типу, що демонструє блок (14b) керування, забезпечений передавачем і приймачем з метою надавання можливості дистанційного керування для засобу (14а) керування і привідного механізму підіймального пристрою, і де сигнали керування посилаються як електричні команди керування на керування в блоці керування пристрою, блок зовнішнього зв'язку (108, 106, 120, 44, 20b), що пропонує з'єднання двостороннього зв'язку через інтернет (100) з блоком керування і блоком обробки зображень, і за допомогою якого оператор (5) крана, розташованого на відстані, може в режимі реального часу спрямовувати і здійснювати керування взаємним розташуванням систем (Rv, Rs) орієнтування. 10. Система керування і позиціонування за п. 9, в якій блок зовнішнього зв'язку (108, 106, 120, 44, 20b) містить комп'ютерний термінал з асоційованим важелем керування. 11. Застосування камери (31, 31') для запису зображень для визначення взаємного розташування змінного елемента (10) футерівки від спрацювання і певного монтажного положення для згаданого елемента на поверхні, сформованого на внутрішній поверхні схильної до спрацювання стінки (2) з монтажними отворами (21) для елемента футерівки від спрацювання, причому камера виконана так, щоб нижня поверхня елемента (10) футерівки від спрацювання проглядалася через монтажний отвір в стінці. 10 UA 116084 C2 11 UA 116084 C2 12 UA 116084 C2 Комп’ютерна верстка О. Гергіль Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 13
ДивитисяДодаткова інформація
Назва патенту англійськоюControl and positioning system for the exchange of wear lining elements on a wall subject to wear
Автори англійськоюMoller, Tage, Furtenbach, Lars, Johansson, Dennis
Автори російськоюМёллер Таге, Фуртенбах Ларс, Йоханссон Дэннис
МПК / Мітки
МПК: B02C 17/22, B25J 19/04, G01B 11/27
Мітки: спрацьовування, спрацювання, позиціонування, елементів, схильній, футерівки, стінці, керування, заміни, система
Код посилання
<a href="https://ua.patents.su/15-116084-sistema-keruvannya-i-pozicionuvannya-dlya-zamini-elementiv-futerivki-vid-spracyuvannya-na-skhilnijj-do-spracovuvannya-stinci.html" target="_blank" rel="follow" title="База патентів України">Система керування і позиціонування для заміни елементів футерівки від спрацювання на схильній до спрацьовування стінці</a>
Спосіб захисту проти спрацювання футерівки пристрою для взяття доменної печі на “тягу”
Номер патенту: 11154
Опубліковано: 15.12.2005
Автори: Грес Леонід Петрович, Жаріков Альберт Миколайович, Бичков Сергій Васильович, Вибиванець Олег Олексійович, Каракаш Євген Олександрович, Флейшман Юрій Мусійович
МПК: C21B 9/10
Мітки: тягу, спрацювання, доменної, футерівки, печі, захисту, спосіб, взяття, пристрою
Формула / Реферат:
1. Спосіб захисту проти спрацювання футерівки пристрою для взяття доменної печі на "тягу", який включає період "тяги" з припиненням подачі повітря через кільцевий повітропровід та прямий повітропровід, що з'єднує кільцевий повітропровід з трубою "тяги", і створення в доменній печі розрідження шляхом відсмоктування горнових газів через пристрій для взяття доменної печі на "тягу", а також період...
Спосіб захисту проти спрацьовування футерівки головного жолоба доменної печі
Номер патенту: 70482
Опубліковано: 17.07.2006
Автори: Крівченко Юрій Сергійович, Черкаський Володимир Матвійович, Литвяк Василь Григорович, Лучкін Вячеслав Вадимович, Жаріков Альберт Миколайович, Бичков Сергій Васильович, Гусаров Олександр Сергійович, Банніков Юрій Григорович
МПК: C21B 7/10, F27B 1/24, F27D 3/14, C21B 7/14
Мітки: печі, футерівки, спосіб, спрацьовування, захисту, жолоба, головного, доменної
Формула / Реферат:
Корисна модель, що заявляється, належить до способів дистанційного моніторингу навколишнього середовища, а саме до способів визначення кількісного складу теплокровних тварин. Результати досліджень можуть бути використані в обстеженнях біосфери, при прогнозуванні динаміки змін тваринного світу на обширних територіях лісів, степів, боліт, визначенні допустимості їх навантаження на рослинний покрив та ін.Відомий спосіб моніторингу...
Спосіб захисту проти спрацювання футерівки головного жолоба доменної печі
Номер патенту: 70482
Опубліковано: 15.10.2004
Автори: Литвяк Василь Григорович, Черкаський Володимир Матвійович, Крівченко Юрій Сергійович, Гусаров Олександр Сергійович, Жаріков Альберт Миколайович, Лучкін Вячеслав Вадимович, Бичков Сергій Васильович, Банніков Юрій Григорович
МПК: F27B 1/24, C21B 7/14, C21B 7/10, F27D 3/14
Мітки: спосіб, доменної, жолоба, печі, футерівки, головного, спрацювання, захисту
Формула / Реферат:
Корисна модель, що заявляється, належить до способів дистанційного моніторингу навколишнього середовища, а саме до способів визначення кількісного складу теплокровних тварин. Результати досліджень можуть бути використані в обстеженнях біосфери, при прогнозуванні динаміки змін тваринного світу на обширних територіях лісів, степів, боліт, визначенні допустимості їх навантаження на рослинний покрив та ін.Відомий спосіб моніторингу...
Система позиціонування головок жорстких дисків
Номер патенту: 4812
Опубліковано: 15.02.2005
Автор: Гур'янов Андрій Петрович
МПК: G11B 5/012
Мітки: дисків, жорстких, система, головок, позиціонування
Формула / Реферат:
1. Система позиціонування головок жорстких дисків, що включає пристрій позиціонування, який містить головки читання/запису, та принаймні один магнітний диск з нанесеними доріжками і сервосистемою, що закріплений на шпинделі, яка відрізняється тим, що пристрій позиціонування виконаний у вигляді принаймні одної мікросхеми, до якої інтегровані головки читання/запису і контролер, головки читання/запису розміщені рядами, так що кількість головок...
Спосіб керування процесом нагрівання монолітної вогнетривкої футерівки сталерозливного ковша
Номер патенту: 91416
Опубліковано: 26.07.2010
Автори: Комков Дмитро Вячеславович, Дрейко Олексій Іванович, Дмитрієв Євген Володимирович, Яковенко Анатолій Тимофійович, Богославський Юрій Анатолійович, Дорофеєв Олександр Вікторович, Колєсников Дмитро Васильович, Крикунов Борис Петрович, Ляховець Олег Андрійович, Петров Юрій Васильович
МПК: B22D 41/12, B22D 41/005, B22D 41/02
Мітки: ковша, сталерозливного, вогнетривкої, керування, нагрівання, футерівки, процесом, монолітної, спосіб
Формула / Реферат:
Спосіб керування процесом нагрівання монолітної вогнетривкої футерівки сталерозливного ковша, що включає подавання газоподібного палива й повітря для горіння в робочий простір сталерозливного ковша відповідно до заданих технологічних параметрів, який відрізняється тим, що технологічні параметри задають на підставі теплового балансу сталерозливного ковша, газоподібне паливо й повітря для горіння подають із витратою, що забезпечує його...
Попередній патент: Похідні пурину для лікування вірусних інфекцій
Наступний патент: Напівпорожня шина для сільськогосподарських машин, зокрема для сівалок
Випадковий патент: Композиція для виготовлення напівфабрикатів