Пристрій для визначення орієнтації осі візира
Номер патенту: 82768
Опубліковано: 12.05.2008
Автори: Ріділа Олександр Степанович, Плита Олександр Андрійович, Біляєва Галина Григорівна


Формула / Реферат
Пристрій для визначення орієнтації осі візира, що містить блок реперних випромінювачів, в кількості не менше трьох, розміщений на захисному шоломі оператора, М оптико-локаційних блоків, де М>1, що містять скануючі дзеркальні призми і розміщені на нерухомій частині об'єкта, який відрізняється тим, що він містить блок обчислень, призначений для визначення кутів візування за попередньо обчисленими в ньому змінними складовими базової відстані кожного оптико-локаційного блока, і візир, жорстко пов'язаний з блоком реперних випромінювачів, при цьому вихід першого оптико-локаційного блока з'єднаний з першим входом блока обчислень, вихід другого оптико-локаційного блока з'єднаний із другим входом блока обчислень, перший вихід блока обчислень з'єднаний з блоком реперних випромінювачів, другий вихід - із входом візира, оптико-локаційні блоки оптично сполучені з блоком реперних випромінювачів, а третій вихід блока обчислень є виходом пристрою.
Текст
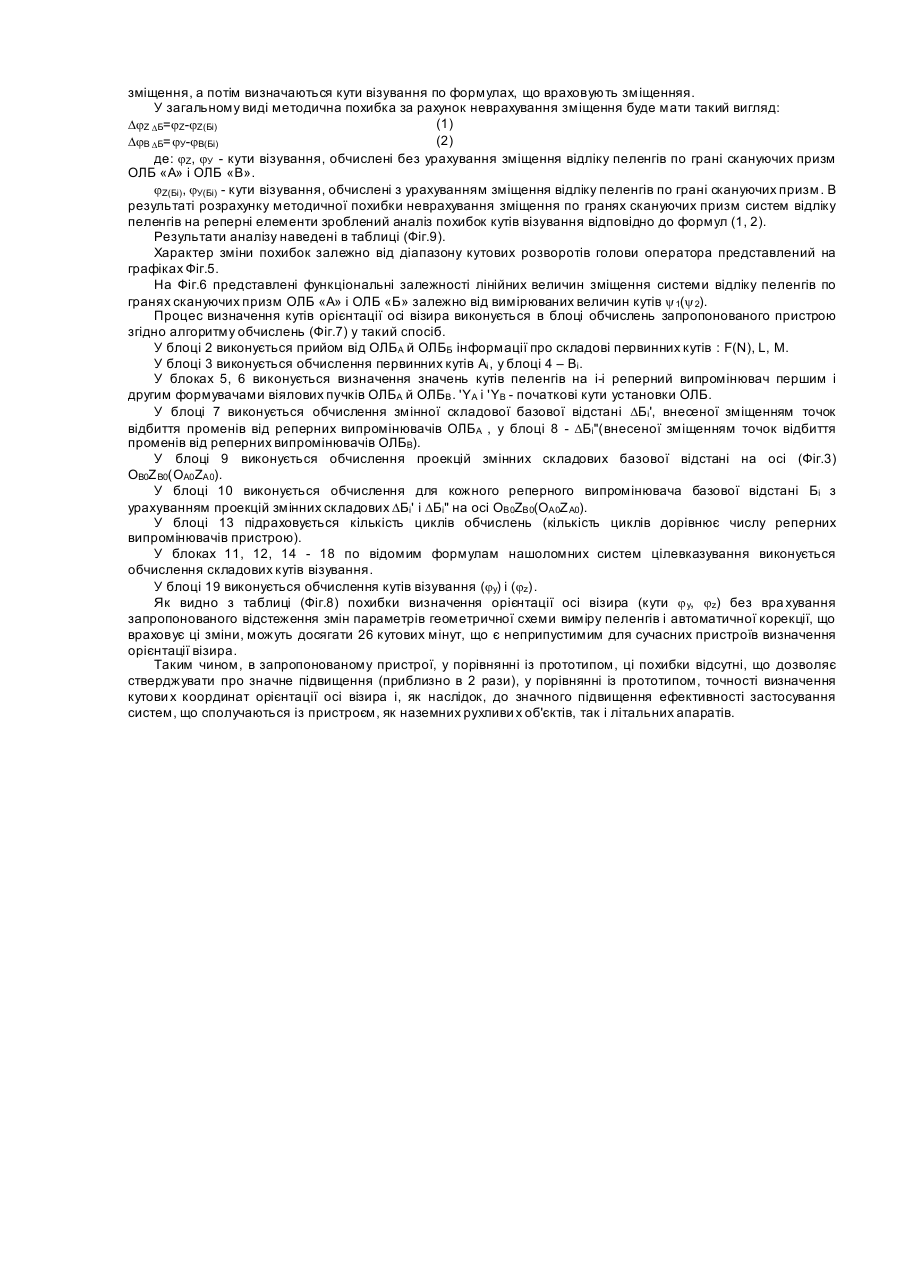
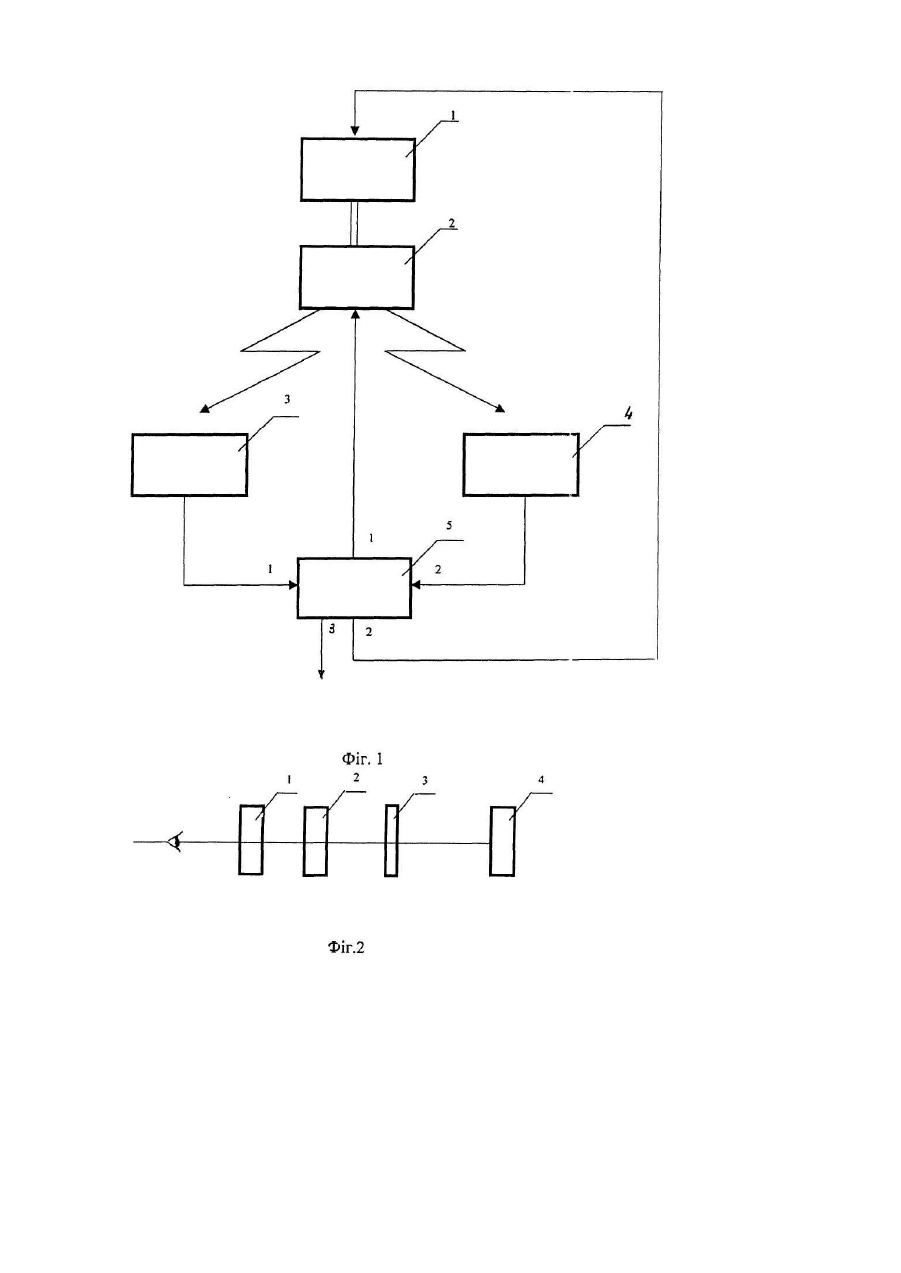
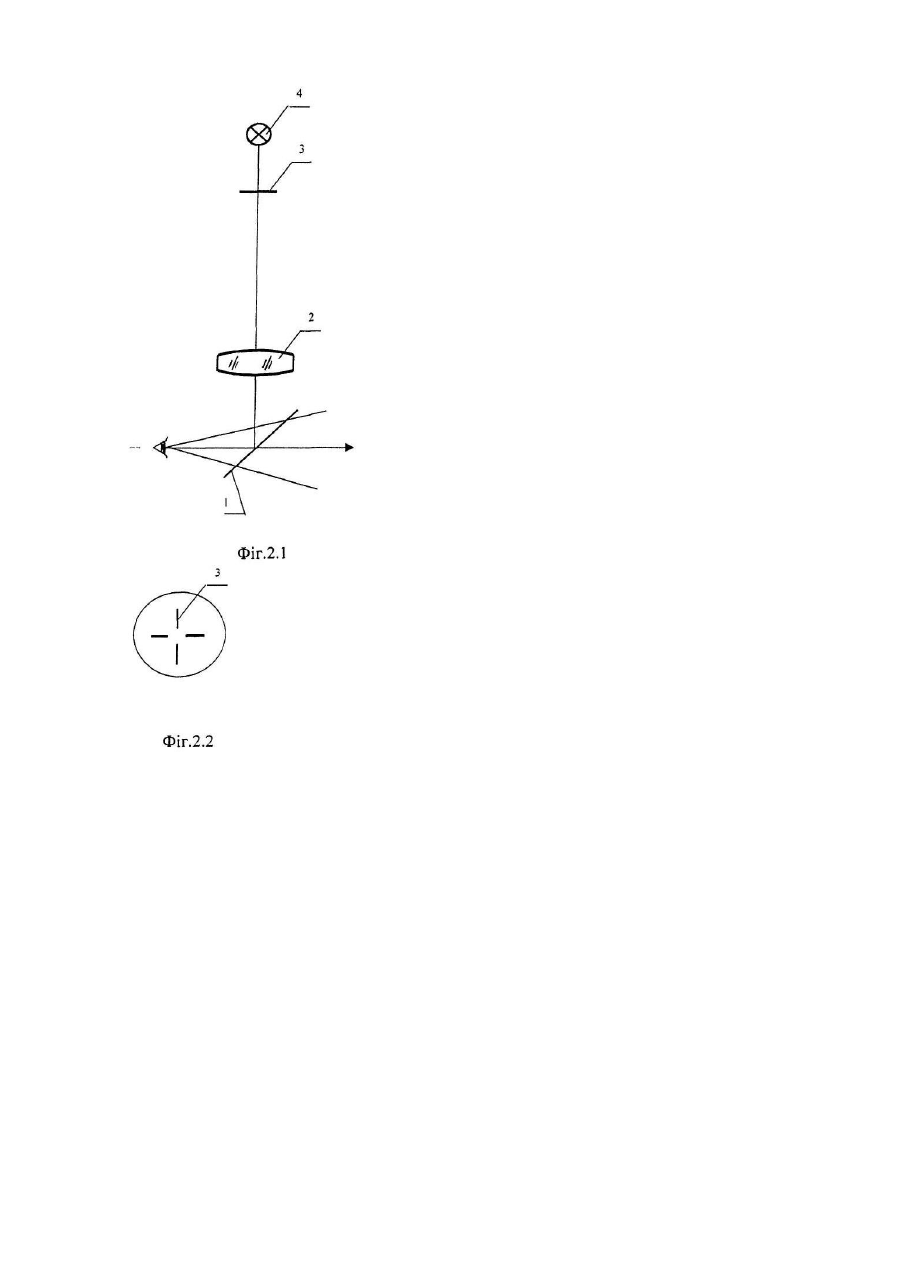
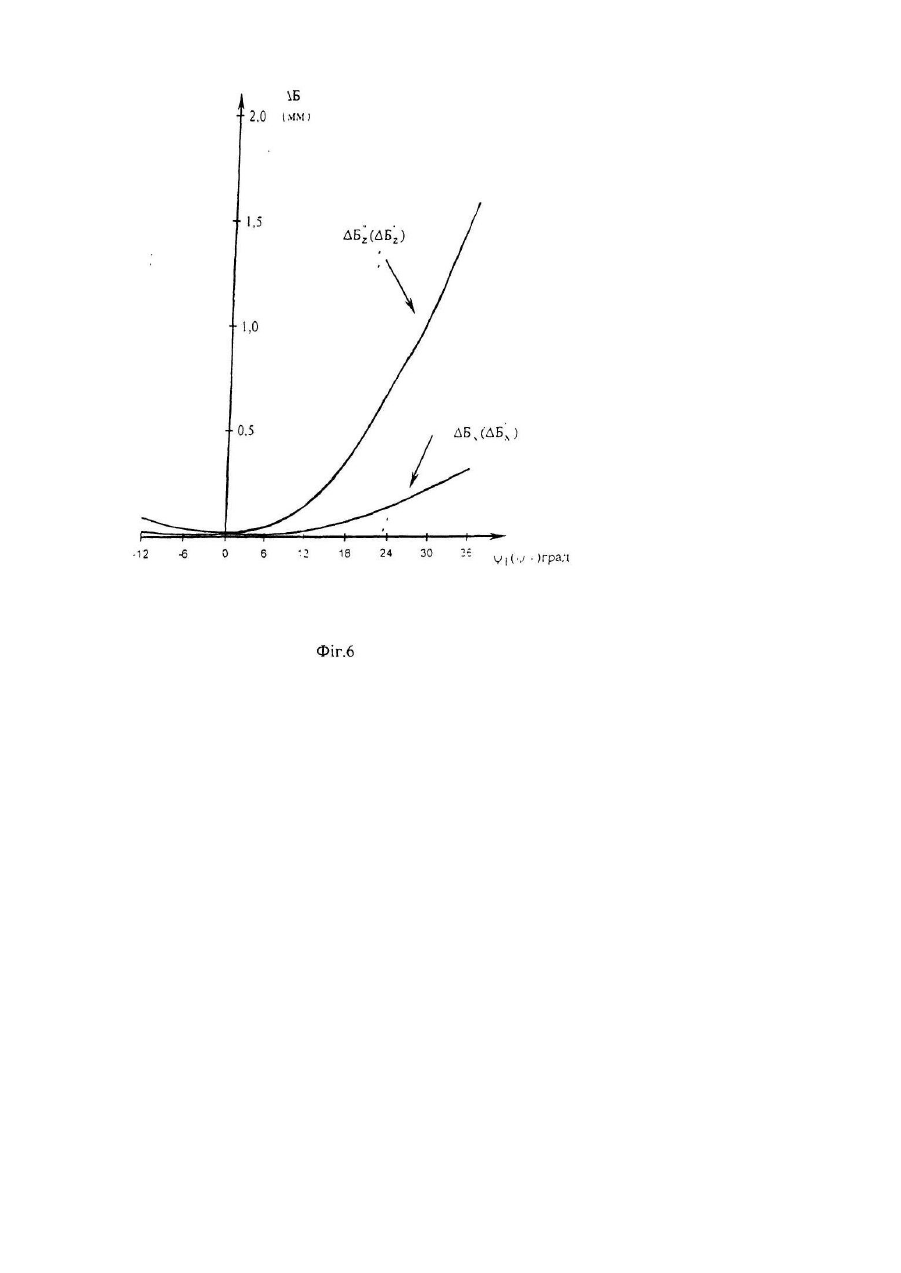
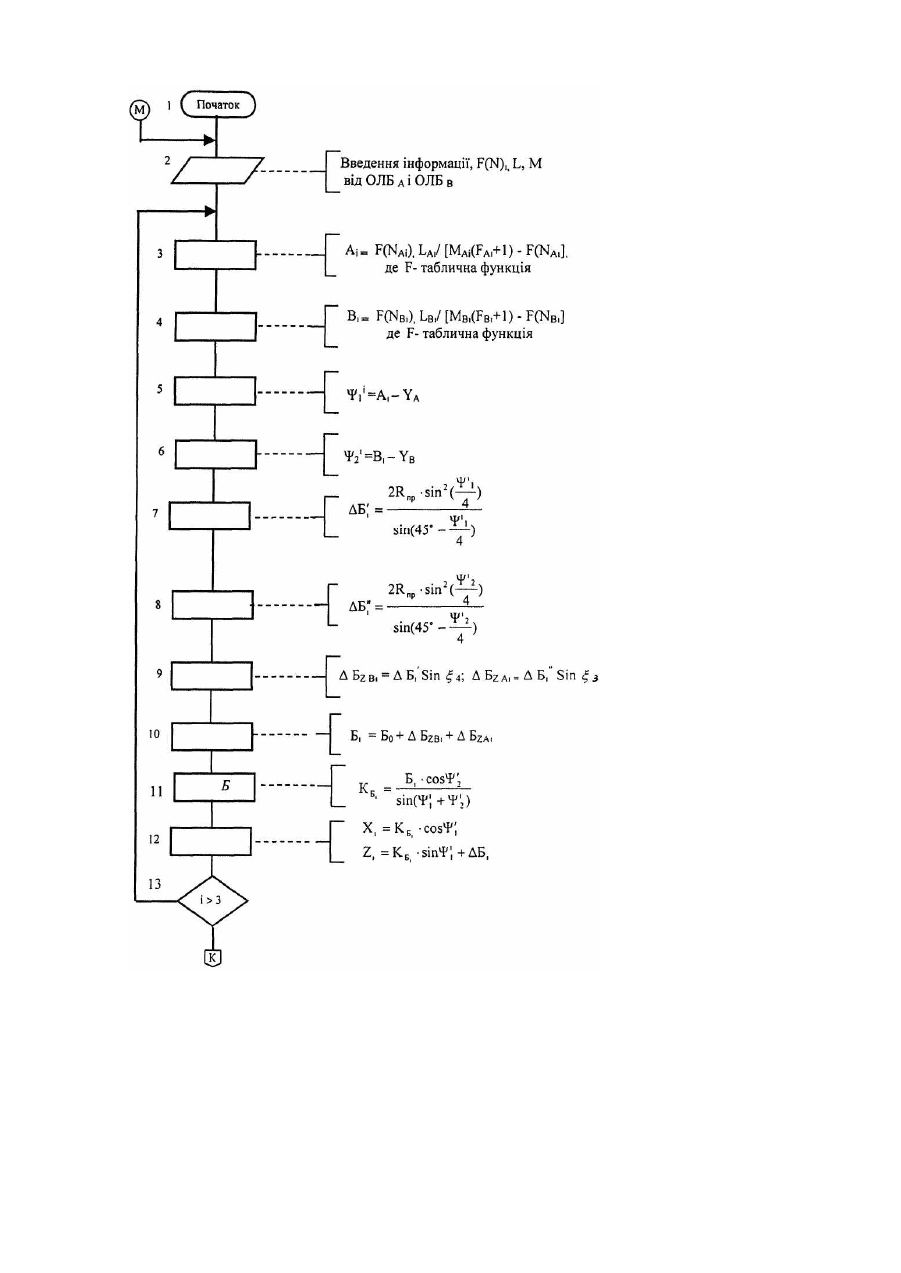
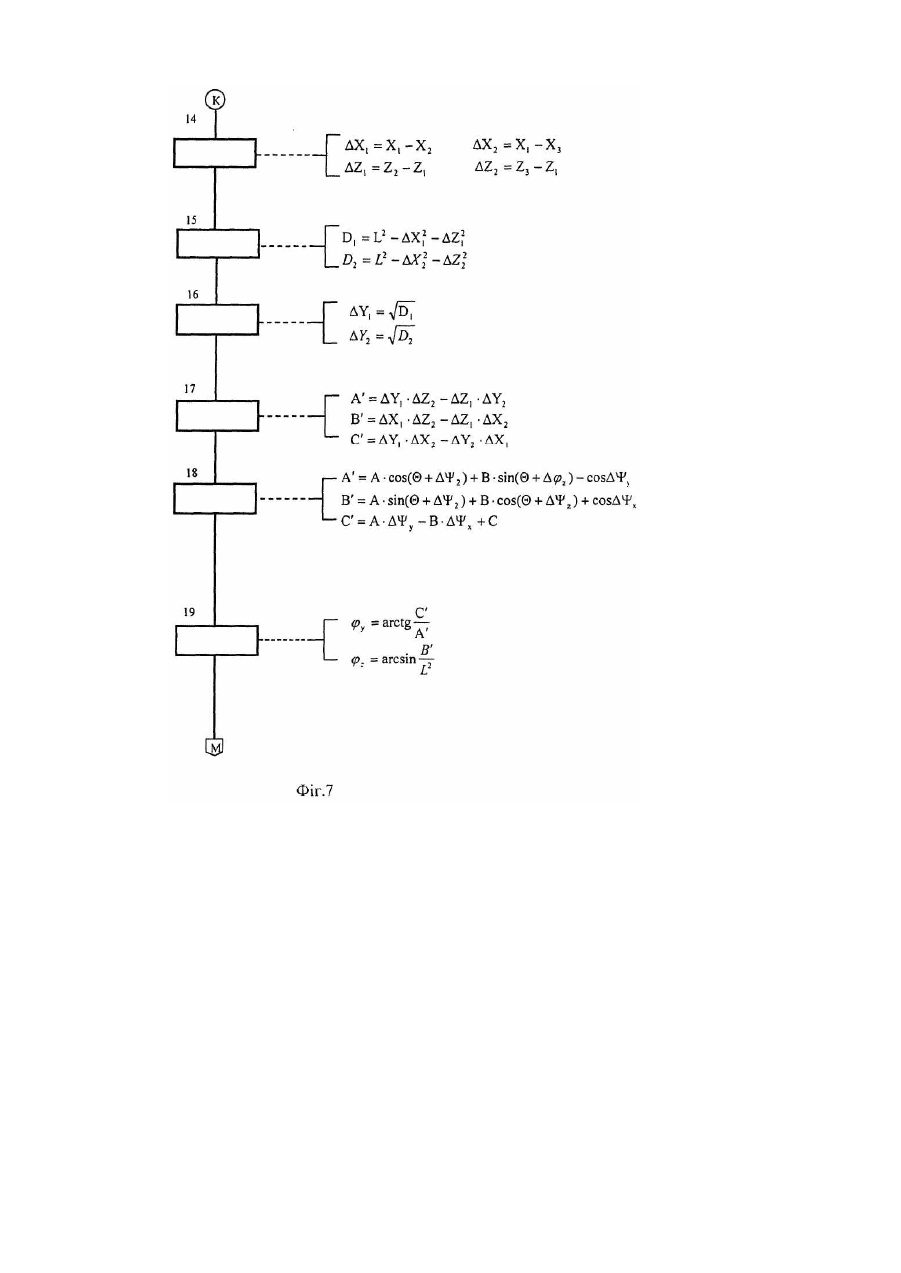
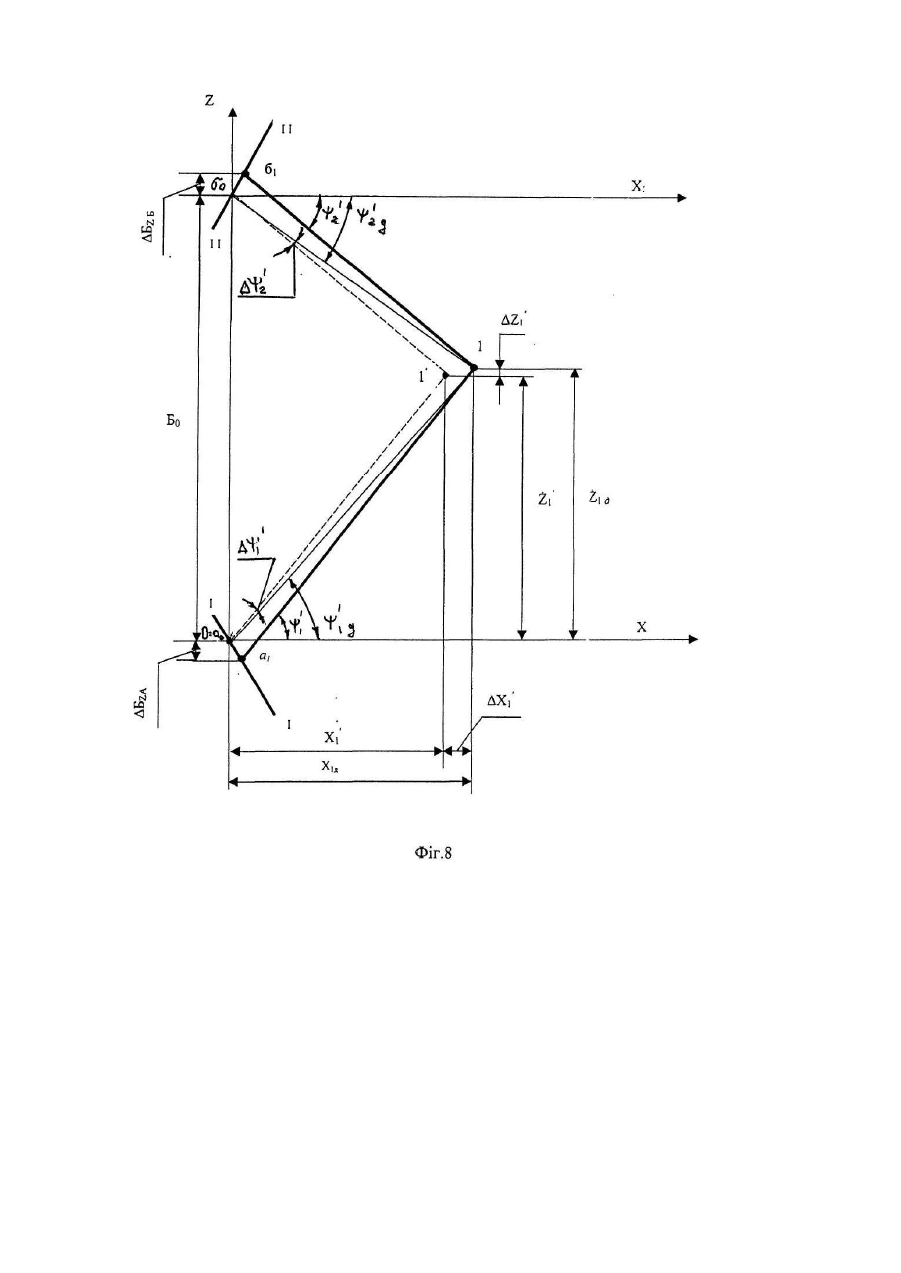
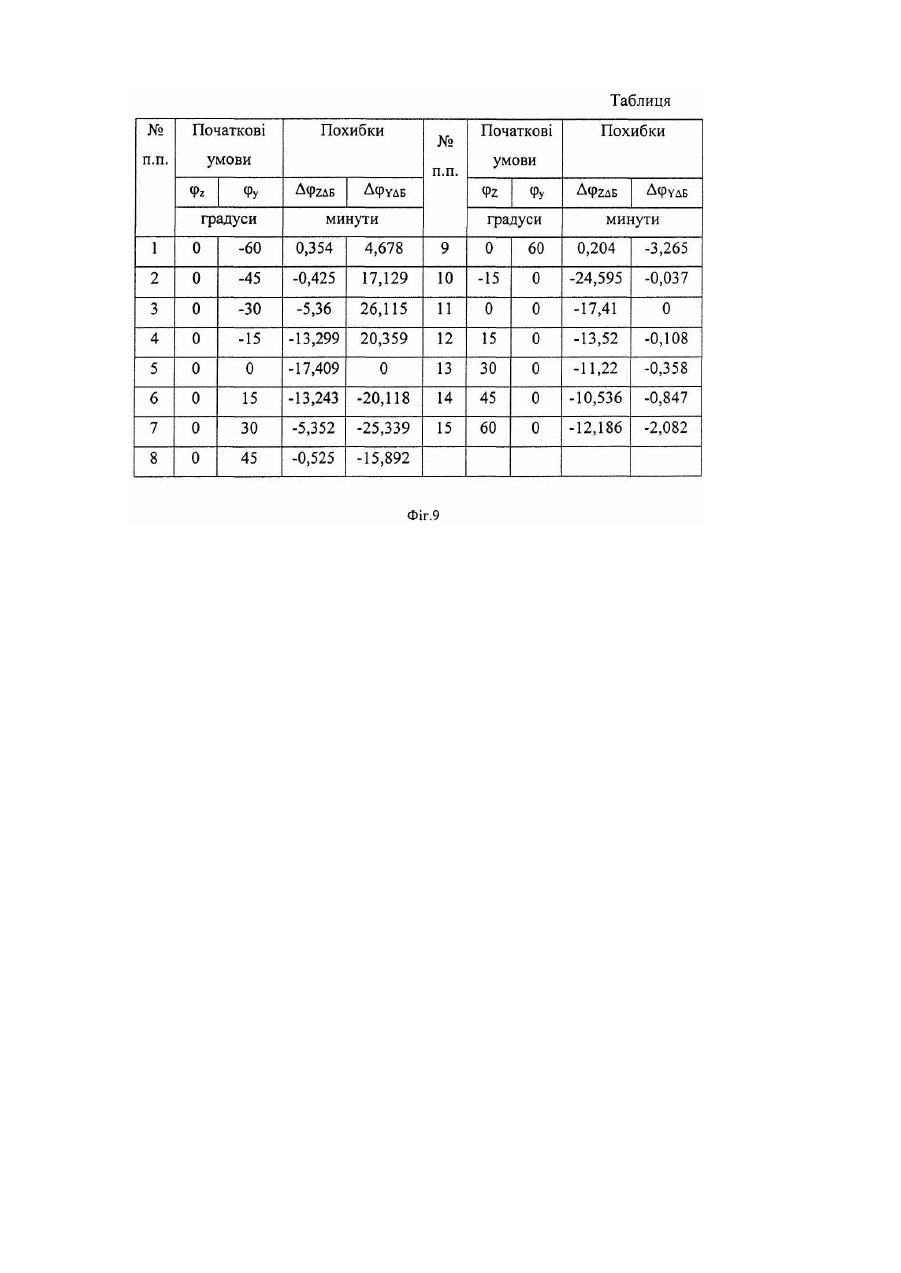
Пропонований пристрій відноситься до області оптико-електронного приладобудування, зокрема, до нашоломних систем цілевказування й прицілювання, і може бути використаний при розробці оптикоелектронних систем дистанційного визначення розворотів рухливого об'єкта, наприклад, захисного шолома оператора в різних галузях те хніки. У цей час широко відомі структурні схеми побудови нашоломних візирних систем, що складаються з оптико-локаційних блоків (ОЛБ), електронного блоку й обчислювача, розміщених на об'єкті, реперного вузла, що представляє собою набір дискретних, рознесених один відносно другого джерел (або приймачів) випромінювання, виразно орієнтованих щодо осі візира (лінії візування оператора) і встановлених на рухливій підставі (наприклад, на шоломі оператора). Докладно склад і принцип дії пристроїв визначення орієнтації осі візира наведений у наступних джерелах. [Патенти США №3.375.375, №3.678238], нашоломна система цілевказування й індикації [Пат. 5051 UA ], Спосіб визначення орієнації осі візира й пристрій для його реалізації [пат. 47972 А "Промислова власність", 2002р, №7-1, з.4.96]. Аналіз відомих аналогів пристрою визначення осі візира, розташованого на рухливій підставі, показує, що структурні схеми побудови цих пристроїв засновані на скануванні простору миттєвим полем зору фотоприймача за допомогою двох обертових призм, установлених на фіксованій (базовій) відстані одна відносно другої. При сполученні віялових пучків ОЛБ з реперним елементом у пристрої виміряються пеленги на даний реперний елемент. Відповідно до прийнятої структурної схеми побудови пристроїв обмірювані пеленги орієнтуються з фіксованих точок базової системи координат, що перебувають на відстані Б0, а потім по обмірюваних пеленгах і відомій базовій відстані визначаються кути орієнтації осі візира. Однак, застосування у відомих пристроях для пеленгації реперних елементів двох скануючих призм ускладнюється явищем зміщення точки відбиття променя, що формує пеленг, по грані скануючої призми залежно від величини вимірюваного кута й оптичних характеристик обертових призм, що в підсумку приводить до зміни розрахункової базової відстані між скануючими призмами ОЛБ, і як наслідок, до значних похибок визначення кутів орієнтації осі візира. Найбільш близьким по технічному рішенню до заявляемого пристрою з відомих аналогів є пристрій, описаний [в патенті 38212 А] і прийнятий за прототип. Відомий пристрій складається з реперних випромінювачів, розміщених на рухливому об'єкті (захисному шоломі) і орієнтованих щодо вектора орієнтації захисного шолома, двох оптико-локаційних блоків (ОЛБ) виконаних у двох варіантах: - із застосуванням обертових дзеркальних призм; - із застосуванням позиційно-чутливого фо топриймача. В описі принципу роботи наведена тільки узагальнююча формула базової відстані між ОЛБ Б=Б0+DБαі+DБβі Де: Б0 - номінальне значення базової відстані між ОЛБ; DБαі, DБβі - змінні частини базової відстані. В матеріалах, пояснюючих принцип роботи пристрою - прототипу не представлено математичного опису змінних складових DБαі i DБβі базової відстані при побудові ОЛБ на скануючих дзеркальних призмах. Наведена математична формула зміни базової відстані DБz ураховує тільки вплив зміщень точок відбиття променів від реперних випромінювачів при проходженні їх через захисне плоско-паралельне скло ОЛБ у випадку побудови ОЛБ із застосуванням позиційно-чутливого фо топриймача (без скануючих зеркальних призм). Таким чином, в описі роботи пристрою-прототипу повністю відсутні математичні формули обчислень змінних частин базової відстані DБαі i DБβі при побудові ОЛБ на скануючих дзеркальних призмах, що не дозволяє виконати відстеження змін параметрів реальної геометричної схеми виміру пеленгів (зміщення точок відліку пеленгів) і автоматичну корекцію цих змін. Узагальнюючи сказане вище потрібно визнати наступні істотні недоліки пристрою-прототипу з ОЛБ, побудованими на скануючих дзеркальних призмах: - не враховане зміщення по грані обертової призми точок відбиття променя, що формує пеленг на реперний елемент відносно початку базової системи координат; - не врахована зміна базової відстані між точками відбиття формуючих променів; - значні похибки визначення кутів орієнтації осі візира при переміщенні захисного шолома по робочій зоні дії оператора. Перераховані недоліки наочно ілюструються схемою пеленгації пристрою прототипу, представленої на Фіг.9, де для простоти розгляду показана пеленгація однієї точки (точка 1). Кути пеленгації (y 1', y 2') точки 1 виміряються формувачами віялових пучків щодо точок відбиття формуючих променів від граней обертових призм а1 і b1. У пристрої-прототипі ці кути орієнтуються з фіксованих точок початкової установки формувачів віялових пучків а0 і Ьо, що приводить до похибок у визначенні пеленгів (Dy 1', Dy 2') пеленгуємої точки (DX1', DAZ 1'), тобто приводить до зміщення в пристрої-прототипі пеленгуємої точки 1 в точку 1', що у свою чергу спричинює появу похибок визначення кутів орієнтації осі візира, а отже похибок визначення кутових координат візуємого об'єкту. На закінчення критики пристрою-прототипу слід зазначити, що даний пристрій не може бути використаний середнім фахівцем у даній області для рішення поставленого перед авторами винаходу завдання, що заявляється, тобто пристрій-прототип має обмеження в застосуванні при необхідності використання його для підвищення точності визначення координат точкових реперних випромінювачів нашоломних систем спеціального призначення. Метою запропонованого технічного рішення є підвищення точності визначення координат точкових реперних випромінювачів нашоломних систем, побудованих на ОЛБ із застосуванням скануючих дзеркальних призм, тобто підвищення точності визначення орієнтації осі візира (кутів цілевказування). Сутність винаходу, що заявляється, полягає в тому, що у відомий пристрій дистанційного визначення координат джерел випромінювання, який включає блок реперних випромінювачів, не менш трьох, розміщений на захисному шоломі оператора, M оптико-локаційних блоків, де М>1, розміщених на нерухомій частині об'єкту, згідно з винаходом, до нього додатково уведені блок обчислень і візир, жорстко пов'язаний з блоком реперних випромінювачів, при цьому вихід першого оптико-локаційного блоку з'єднаний з першим входом блоку обчислень, вихід др угого оптико-локаційного блоку з'єднаний із другим входом блоку обчислень, перший вихід блоку обчислень з'єднаний з блоком реперних випромінювачів, другий вихід - із входом візира, а оптиколокаційні блоки оптично сполучені з блоком реперних випромінювачів. Третій вихід блоку обчислень является виходом пристрою. Докладний опис запропонованого пристрою наведено нижче з посиланням на креслення. На Фіг.1 -представлена блок-схема пропонованого пристрою. На Фіг.2, 2.1, 2,2 - представлена схема технічної реалізації візира. На Фіг.3 - представлене схематичне пояснення зміщення відліку пеленгів по грані скануючої призми ОЛБ «Б». На Фіг.4 - представлена схема спільної робота скануючих призм ОЛБ «А» і ОЛБ «В» по визначенню пеленгів на реперні елементи (Pi) у пропонованому пристрої. На Фіг.5 - представлені графіки похибок кутів віз ування. На Фіг.6 - представлені графіки лінійної величини зміщення системи відліку пеленгів по гранях скануючих призм ОЛБ «А» і ОЛБ «Б». На Фіг.7 - представлений алгоритм обчислень пристрою, що заявляється. На Фіг.8 - представлена схема пеленгації реперних елементів пристрою-прототипу з побудовою ОЛБ на скануючих дзеркальних призмах. На фіг.9 - представлена таблиця похибок кутів орієнтації осі візира пристрою-прототипу (при неврахуванні зміщенняя систем відліку пеленгів на реперні елементи по гранях скануючи призм). На кресленнях прийняті наступні позначення: OXYZ - базова система координат; y 1', y 2' - пеленги на і-тий реперний випромінювач, обмірювані першим (ОЛБА) і другим (ОЛББ) формувачами віялових пучків; y 1ді, y 2ді - дійсні пеленги на реперний випромінювач, обмірювані з фіксованих точок; Х1 ', Z1' - вимірювані пристроєм координати пеленгуємої точки в базовій системі координат; Х1д, Z 1д - дійсні координати пеленгуємих реперних випромінювачів у базовій системі координат; І-І, II-II - напрямок відбиття формуючи х променів у першому й др угому формувачі віялових пучків; Б0 - початкова базова відстань між точками відбиття формуючих променів, прийнята за нульову; Dy 1', Dy 2' - похибки визначення пеленгів; DX1', DAZ 1' - похибки визначення лінійних координат пеленгуємих випромінювачів; DБZa, DБZб - приріст зміщення точки відбиття формуючого променя формувачів ОЛБ «А» і ОЛБ «В»; x1 , x3 , x5 - кути, обумовлені установкою оптичної осі тракту ОЛБ « А» щодо базової системи координат; x2 , x4 , x5 - кути, обумовлені установкою оптичної осі тракту ОЛБ «В» щодо базової системи координат; Rпp - радіус призми; Опр - центр обертання призми; P1, Р 2, Р 3 - реперні випромінювачі. Dy і2N - кут повороту нормалі до грані призми, що відбиває, щодо початкового положення нормалі (y 2=0) при відбитті променя від реперного випромінювача в канал приймача. Роботу пропонованого пристрою розглянемо на прикладі схемної побудови, представленої на Фіг.1, де: 1 - візир; 2 - блок реперних випромінювачів; 3 - перший оптико-локаційний блок (ОЛБ «А»); 4 - другий оптико-локаційний блок (ОЛБ «Б»); 5 - блок обчислень. Візир являє собою оптичний коліматорний формувач, жорстко пов'язаний із блоком реперних випромінювачів, розташовуваний на рухливому об'єкті, наприклад, на шоломі оператора. Візир призначений для виводу в поле зору оператора зображення візирної мітки, наприклад у вигляді хреста (див. Фіг.2.2). До складу візира (див. Фіг.2, 2.1) входять, розташовані на нульовій лінії візування ока оператора, похила напівпрозора пластина 1, вхідний об'єктив 2, виконаний, наприклад у вигляді лінзового об'єктива. В фокальній площині об'єктива розміщена марка - сітка 3, виконана, наприклад, на склі або металі у вигляді прозорого хреста на темному фоні. Марка-сітка висвітлюється джерелом випромінювання 4, наприклад випромінюючим діодом, який живиться від елементів живлення блоку обчислень. При формуванні нульової лінії візування світло від джерела випромінювання 4 проходить через маркусітку 3 і попадає в об'єктив 2. Далі світло відбивається від похилої напівпрозорої пластини 1 і попадає в око оператора у вигляді колімованого випромінювання, формуючи в такий спосіб у полі зору оператора зображення візирної мітки у вигляді хреста. Блок реперних випромінювачів включає в себе три реперних випромінювачі, які розміщені в одній площині в вигляді трикутника. Площина розміщення реперних випромінювачів орієнтована під відомим кутом до осі візира. Напруга живлення блока реперних випромінювачів і випромінювача візира поступає з блока обчислень. Блок обчислень 4 може бути побудований, наприклад, на мікроконтролері типу ATMEGA 128. Два оптико-локаційних блоки (див.Фіг.1) ОЛБ «А» (3), ОЛБ «Б» (4) з формувачами обертових віялових пучків, виконаних на фотоприймачах з вузьким полем зору й обертових дзеркальних призмах, а також блок обчислень (5) розміщуються поза шоломом на нерухливій частині об'єкта. При цьому ви хід ОЛБ « А» з'єднаний з першим входом блоку обчислень, вихід ОЛБ «Б» з'єднаний із другим входом блоку обчислень, перший вихід якого з'єднаний з блоком реперних випромінювачів, другий вихід - із входом візира, а оптико-локаційні блоки оптично сполучені з блоком реперним випромінювачів. Третій вихід блоку обчислень является виходом пристрою. Оптико-локаційні блоки розміщуються в зоні гарантованого огляду їх обертовими віяловими пучками блоку реперних випромінювачів у робочій зоні переміщень голови оператора. Формувачі обертових віялових пучків ОЛБ « А» і ОЛБ «Б» сканують простір, у якому перебувають реперні випромінювачі, розміщені на захисному шоломі оператора. Розворотом голови оператор наводить зображення візирної мітки на вибраний для візування об'єкт. При сполученні віялового пучка з реперним випромінювачем відбувається відбиття від граней скануючих призм променів, що надходять у канал фотоприймача, за інформацією якого в блоці обчислень 4 виконується підрахунок (див. Блок 2, Фіг.8) складових кутів-пеленгів: - по каналу ОЛБ « А» - N Aі; LAі; MAі; - по каналу ОЛБ «В» - N Bі; LBі; МBі. Обробка сигналів, що надходять із ОЛБ «А» і ОЛБ «В» виконується блоком обчислень 5 згідно алгоритма обчислень (див. Фіг.7). Вивід формульних залежностей зміщення системи відліку пеленгів по гранях скануючих призм ілюструється схемами, представленими на Фіг.3, Фіг.4. Вивід формул зроблений для ОЛБ «В», для ОЛБ «А» вивід аналогічний. Як видно із схеми Фіг.3 нульовий промінь, який падає на грань, що відбиває (y і2=0), збігається з віссю ОВ0 ХВ0 й орієнтований у зворотну сторону. Відбитий від дзеркальної грані промінь, прийнятий приймачем, орієнтований при цьому під кутом x4 до осі ОВ0 ХВ0. Точка падіння нульового центрального променя на грань призми збігається із точкою OВ0, що відповідає номінальному розміру бази Б0 і початку відліку системи ОВ0 ХВ0 YВ0ZВ0. Примітка. У цьому випадку значення кутів проходження випромінювання від реперних випромінювачів по розглянутій оптичній схемі ОЛБ «В», узяте для одного із відомих пристроїв визначення осі візира: x1=12°, x2=51°, x4=78°. Застосування ОЛБ із іншою геометрією скануючих призм приводить до зміни в формульних залежностях значень радіусів призм і кутів x1, x2, x3, x4, x5. Орієнтація нормалі до грані, що відбиває промінь (y 2N0) У нульовому положенні дорівнює 78°/2=39° щодо осі ХB0 . З появою кута y 2і¹0 у загальному випадку точка падіння центрального променя на грань призми зміщується щодо нульового положення OB0. Зазначене зміщення точки падіння центрального променя на грань призми, що відбиває, (кут y 2і¹0) обумовлено неузгодженістю центра повороту дзеркала, що відбиває, щодо площини відбиття (Rпp¹0). Зменшення радіуса скануючої призми зменшує зміщення точки падіння центрального променя щодо нульової точки ОВ0, тобто DБ=0 при Rпp→0. На схемі Фіг.3, Фіг.4 зміщення DБ" по напрямку збігається з напрямком центрального променя, прийнятого приймачем, і в загальному випадку залежить від його конструкційної установки і юстировки, у розглянутому випадку спрямовано під кутом 78° до осі ОВ0ХВ0. По модулю зміщення DБ" визначається із трикутника nОВ0m по теоремі синусів: mOB0 nOB 0 = ¢ sinDy¢2N sin(51° - Dy 2N ) де: nОB0 - модуль вектора зміщення DБ; nОB0 - величина, обумовлена із прямокутного трикутника ОпрnОB0, де кут ОпрnОB0=90°; Dy¢2N кут nОїдОВ0= 2 , сторона ОпрОB0=Rпp; Dy¢2N nОB0=Rїд×tg 2 ; Dy 2Ni - кут повороту нормалі до грані призми, що відбиває, щодо початкового положення нормалі (y 2=0) при відбитті променя випромінюючого діода y 2Nі¹0 у канал приймача. За законами оптики кут повороту нормалі дорівнює половині кута, що вводиться. На підставі вищевикладеного й з огляду на те, що в аналізованому пристрої номінальне положення бази Бо визначається як відстань між точками відбиття променів y 1=12°, y 2=12° від граней скануючих призм ОЛБ «А» і ОЛБ «В», модуль змінної частини базової відстані у загальному випадку для і-ой реперної точки визначається по наступній формулі. DБi² = Rпр æ yi ö æ yi ö tgç 2 - 3° ÷ sinç 2 - 6° ÷ ç 4 ÷ ç 2 ÷ è ø è ø; i æ ö y sinç 51° - 2 - ÷ ç 2 ÷ è ø æ yi ö sinç 2 - 3° ÷ ç 4 ÷ è ø ; DБi² = 2Rпр i æ y ö sinç 51° - 2 - ÷ ç 2 ÷ è ø У проекціях на осі системи ОЛБ «В» - OВ0 ХB0 YB0Z B0 (Фіг.3): DБŻв"=DБi"Sinx4 Для ОЛБ «А» формула обчислення DБŻа "аналогічна: DБŻa"=DБi"Sinx3 Для узагальнення матеріалів виникнення зміщення систем відліку пеленгів при спільній роботі двох скануючих блоків ОЛБ «А» і ОЛБ «В» на Фіг.4 наведена загальна схема пеленгації реперних випромінювачів. На схемі прийняті наступні, додаткові до раніше згаданих, позначення: Опр1; Опр2 - центри обертання скануючих призм ОЛБ «А» і ОЛБ «В». αпр1і; αпр2і - вимірювані кути розвороту скануючих призм на момент реєстрації і-того реперного елемента приймачами ОЛБ «А» і ОЛБ «В» відповідно. y 1*i, y 2*i - пеленги на реперні елементи, обумовлені без обліку зміщення систем відліку пеленгів по гранях скануючих призм ОЛБ «А» і ОЛБ «В». y 1i, y 2i - пеленги на реперні елементи, обумовлені обліком зміщення систем відліку пеленгів. Спеціальна початкова установка оптико-локаційних блоків (див.Фіг.4) щодо базової системи координат OXYZ виконується в результаті установки їх таким чином, що промені, що формують нульові пеленги на реперні елементи (y 1=0, y 2=0), збігаються (або протилежні) з напрямком осі OX базової системи координат, а відстань між точками відбиття променів (ОА0; OB0) від граней скануючих призм блоків ОЛБ «А» і ОЛБ «В» по осі OZ базової системи координат дорівнює обраній базовій відстані Б0. При цьому початком координат базової системи OXYZ прийнята точка ОА0 відбиття променя від грані скануючої призми ОЛБ «А», що формує нульовий пеленг y 1=0, тобто ОА0ºО. Операція виміру кутів розвороту скануючих призм ОЛБ «А» і ОЛБ «В» виконується в такий спосіб: У момент реєстрації випромінювання від реперних випромінювачів, наприклад, від елемента Pі (див. Фіг.4) фотоприйомними пристроями оптико-локаційних блоків (приймач 1 - ОЛБ «А», приймач 2 - ОЛБ «В») роблять вимір розвороту скануючи х призм (αпр1і - ОЛБ « А», αпр2і - ОЛБ «В») щодо їхніх н ульових положень, які задаються нормалями до граней нульової установки Опр1О Ао; Опр2 OВо на підставі описаної вище операції початкової установки ОЛБ «А» і ОЛБ «В». Кути розвороту скануючих призм αпр1і; αпр2і , обмірювані в момент пеленгації реперного елемента Pі, являють собою кути повороту нормалей до граней скануючих призм, що відбивають промені, які формують поточні пеленги. На підставі законів оптики орієнтація формуючих променів у базовій системі координат, тобто щодо нульових формуючих променів буде визначатися обмірюваними кутами повороту скануючих призм по формулі y 2і=2αпр2і. Для випадку Rпp1→0; Rпp2→0 кути y 1i, y 2i будуть шуканими пеленгами на реперні елементи, однак, при використанні в схемі скануючих призм (Rпр1¹0; Rпр2¹0), виникають зміщення точок відбиття, що формують поточні пеленги відносно точок відбиття променів, що формують нульові пеленги (DБZ' - ОЛБ «A»; DБZ" - ОЛБ «В»), що спричиняє необхідність проведення наступних додаткових операцій. До таких операцій відносятся операції визначення зміщення (DБZ'; DБZ") точок відбиття променів, що формують поточні пеленги, які виконуєтся на підставі використання наступних параметрів: - параметрів скануючої призми: Rпр1; Rпр2; - параметрів кутової установки оптичних осей прийомних трактів щодо базової системи координат: x1 , x3 , x5 для ОЛБ « А»; x2 , x4 , x5 для ОЛБ «В»; - обмірюваних кутів розвороту скануючи х призм: αпр1і; α пр2і Сумарна базова відстань між ОЛБ в момент регістрації випромінення від реперного віпромінювача буде обчислюваться по формулі: Бі=Б0+DБZa"+DБZв" Куто ві координати візирного променя jY, jZ у базовій системі координат OXYZ визначаються по відомим формульним залежностям, наведеними в алгоритмі обчислень (див. Фіг.8, блоки 11,12,14...19). Формули обчислення кутових координат візирного променя jY, jZ приведені в викладеному матеріалі для полегшення розуміння принципу роботи пристрою і в предмет винаходу не входять. У наведених вище матеріалах приведений вивід формульних залежностей, що описують фізичні процеси виникнення й обліку зміщення системи відліку пеленгів по грані скануючої призми одного із блоків, а саме, ОЛБ «В». На підставі вищевикладеного слід зазначити, що пеленги для реперного елемента Pі, обумовлені через обмірюваний кут повороту призм y 1*i, y 2*i без обліку відповідної орієнтації в точках зміщення по грані скануючих призм (DБZ'; DБZ") приводить до похибок у визначенні пеленгів, а отже й кутів візування Djу, Djz . Dy 1*i=y 1*i-y 1i Dy 2*i=y 2*i-y 2i. Розрахунок методичної похибки неврахування зміщення системи відліку пеленгів по грані скануючої призми зроблений по схемах, представленим на Фіг.3; Фіг.4. Математична модель визначення методичної похибки по обліку зміщення системи відліку пеленгів по грані скануючої призми будується так, що спочатку визначаються кути візування по формулах, що не враховують зміщення, а потім визначаються кути візування по формулах, що враховують зміщенняя. У загальному виді методична похибка за рахунок неврахування зміщення буде мати такий вигляд: (1) DjZ DБ=jZ-jZ(Бі) (2) DjВ DБ=jУ-jВ(Бі) де: jZ, jУ - кути візування, обчислені без урахування зміщення відліку пеленгів по грані скануючих призм ОЛБ «А» і ОЛБ «В». jZ(Бі), jУ(Бі) - кути візування, обчислені з урахуванням зміщення відліку пеленгів по грані скануючих призм . В результаті розрахунку методичної похибки неврахування зміщення по гранях скануючих призм систем відліку пеленгів на реперні елементи зроблений аналіз похибок кутів візування відповідно до формул (1, 2). Результати аналізу наведені в таблиці (Фіг.9). Характер зміни похибок залежно від діапазону кутових розворотів голови оператора представлений на графіках Фіг.5. На Фіг.6 представлені функціональні залежності лінійних величин зміщення системи відліку пеленгів по гранях скануючих призм ОЛБ «А» і ОЛБ «Б» залежно від вимірюваних величин кутів y 1(y 2). Процес визначення кутів орієнтації осі візира виконується в блоці обчислень запропонованого пристрою згідно алгоритму обчислень (Фіг.7) у такий спосіб. У блоці 2 виконується прийом від ОЛБА й ОЛББ інформації про складові первинних кутів : F(N), L, M. У блоці 3 виконується обчислення первинних кутів Aі , у блоці 4 – Ві. У блоках 5, 6 виконується визначення значень кутів пеленгів на і-і реперний випромінювач першим і другим формувачами віялових пучків ОЛБА й ОЛБВ . 'YA і 'YB - початкові кути установки ОЛБ. У блоці 7 виконується обчислення змінної складової базової відстані DБi', внесеної зміщенням точок відбиття променів від реперних випромінювачів ОЛБA , у блоці 8 - DБi"(внесеної зміщенням точок відбиття променів від реперних випромінювачів ОЛБB). У блоці 9 виконується обчислення проекцій змінних складових базової відстані на осі (Фіг.3) OB0Z B0(OA0 ZA0). У блоці 10 виконується обчислення для кожного реперного випромінювача базової відстані Бі з урахуванням проекцій змінних складових DБі' і DБі" на осі OB0ZB0(OA0Z A0). У блоці 13 підраховується кількість циклів обчислень (кількість циклів дорівнює числу реперних випромінювачів пристрою). У блоках 11, 12, 14 - 18 по відомим формулам нашоломних систем цілевказування виконується обчислення складових кутів візування. У блоці 19 виконується обчислення кутів візування (jу) і (jz). Як видно з таблиці (Фіг.8) похибки визначення орієнтації осі візира (кути j у, jz) без вра хування запропонованого відстеження змін параметрів геометричної схеми виміру пеленгів і автоматичної корекції, що враховує ці зміни, можуть досягати 26 кутових мінут, що є неприпустимим для сучасних пристроїв визначення орієнтації візира. Таким чином, в запропонованому пристрої, у порівнянні із прототипом, ці похибки відсутні, що дозволяє стверджувати про значне підвищення (приблизно в 2 рази), у порівнянні із прототипом, точності визначення кутови х координат орієнтації осівізира і, як наслідок, до значного підвищення ефективності застосування систем, що сполучаються із пристроєм, як наземних рухливи х об'єктів, так і літальних апаратів.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for determination of orientation of axis of sight
Автори англійськоюRidila Oleksandr Stepanovych, Biliaeva Halyna Hryhorivna, Plyta Oleksandr Andriiovych
Назва патенту російськоюУстройство для определения ориентации оси визира
Автори російськоюРидила Александр Степанович, Биляева Галина Григорьевна, Плита Александр Андреевич
МПК / Мітки
МПК: F41G 3/22, G01B 11/26, G02B 23/02
Мітки: визначення, візира, орієнтації, осі, пристрій
Код посилання
<a href="https://ua.patents.su/15-82768-pristrijj-dlya-viznachennya-oriehntaci-osi-vizira.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення орієнтації осі візира</a>
Пристрій визначення орієнтації осі візира
Номер патенту: 30189
Опубліковано: 15.05.2003
Автори: Черняк Сергій Іванович, Беляєва Галина Григорівна, Плита Олександр Андрійович
МПК: G02B 23/00
Мітки: осі, орієнтації, визначення, пристрій, візира
Формула / Реферат:
Пристрій визначення орієнтації осі візира, що містить візир, встановлений на рухомій основі, наприклад на захисному шоломі оператора, складений із освітлювача, марки /сітки/, об'єктива і похилої плоскопаралельної пластини, який відрізняється тим, що в його склад введені блок виміру параметрів розвороту, блок задання початку відліку, блок корекції, блок нелінійних перетворень, блок множення, перший та другий суматори, пристрій поділу та блок...
Спосіб визначення орієнтації осі візира і пристрій для його реалізації
Номер патенту: 47972
Опубліковано: 15.07.2004
Автори: Ліпунова Валентина Григорівна, Кадочніков Сергій Михайлович, Черняк Сергій Іванович
МПК: F41G 3/22
Мітки: візира, визначення, реалізації, осі, пристрій, спосіб, орієнтації
Формула / Реферат:
1. Спосіб визначення орієнтації осі візира, що включає сканування простору розміщення нашоломного вузла з n випромінюючими діодами плоскими оптичними віяловими променями, визначення первинних пеленгів на кожний з n випромінюючих діодів та положення n випромінюючих діодів у просторовій площині, яка проходить через реперні точки нашоломного вузла, в яких розміщені випромінюючі діоди, який відрізняється тим, що сканують просторову площину...
Пристрій визначення орієнтації осі візира
Номер патенту: 30190
Опубліковано: 15.11.2000
Автори: Полєжаєв Віктор Вікторович, Беляєва Галина Григорівна, Плита Олександр Андрійович, Бузанов Віктор Іванович, Черняк Сергій Іванович
МПК: G02B 23/00
Мітки: візира, пристрій, осі, орієнтації, визначення
Формула / Реферат:
Пристрій визначення орієнтації вісі візира, який містить в собі візир, встановлений на рухомій основі, наприклад, на захисному шоломі оператора, складений із освітлювача, марки (сітки), об'єктиву і похилої напівпрозорої пластини, який відрізняється тим, що в його склад введені блок виміру параметрів розвороту, блок задання початку відліку, блок корекції, блок інтеграторів, косинусний перетворювач і пристрій поділу, а в візир введений...
Пристрій визначення орієнтації осі візира
Номер патенту: 30199
Опубліковано: 15.11.2000
Автори: Беляєва Галина Григорівна, Черняк Сергій Іванович, Плита Олександр Андрійович, Полєжаєв Віктор Вікторович
МПК: G02B 23/00
Мітки: визначення, осі, пристрій, візира, орієнтації
Формула / Реферат:
Пристрій визначення орієнтації осі візира, що містить візир, встановлений на рухомій основі, наприклад, на захисному шоломі оператора, складений із освітлювача, марки (сітки), об'єктиву та нахиленої плоскопаралельної пластини, який відрізняється тим, що до нього введено блок вимірювання параметрів розвороту, блок завдання початку відліку, запам'ятовуючий пристрій, суматор та інтегратор, а до візиру додатково встановлено у фокальній поверхні...
Спосіб визначення орієнтації осі візира та нашоломна система цілевказування для його реалізації
Номер патенту: 47969
Опубліковано: 15.09.2003
Автори: Черняк Сергій Іванович, Кадочніков Сергій Михайлович, Ліпунова Валентина Григорівна
МПК: F41G 3/22
Мітки: осі, система, візира, спосіб, нашоломна, визначення, орієнтації, цілевказування, реалізації
Формула / Реферат:
1. Спосіб визначення орієнтації осі візира, суть якого полягає в скануванні простору, в якому знаходиться нашоломний вузол із випромінюючими діодами, плоскими віяловими оптичними променями, визначенні первинних пеленгів на кожний випромінюючий діод на момент проходження через випромінюючі діоди віялових оптичних променів, визначенні положення нашоломного вузла у просторі та визначенні орієнтації осі візира, який відрізняється тим, що...
Попередній патент: Імпульсний варіатор
Наступний патент: Вертикальна імпульсна машина для обробки металів тиском
Випадковий патент: Спосіб лікування гострого холециститу