Спосіб визначення орієнтації осі візира і пристрій для його реалізації
Номер патенту: 47972
Опубліковано: 15.07.2004
Автори: Ліпунова Валентина Григорівна, Кадочніков Сергій Михайлович, Черняк Сергій Іванович
Формула / Реферат
1. Спосіб визначення орієнтації осі візира, що включає сканування простору розміщення нашоломного вузла з n випромінюючими діодами плоскими оптичними віяловими променями, визначення первинних пеленгів на кожний з n випромінюючих діодів та положення n випромінюючих діодів у просторовій площині, яка проходить через реперні точки нашоломного вузла, в яких розміщені випромінюючі діоди, який відрізняється тим, що сканують просторову площину розміщення n випромінюючих діодів із різних просторових точок, враховуючи геометричну сталість розміщення випромінюючих діодів в реперних точках та часткове накладання площин сканування одна на одну, визначають пеленги щонайменше n-1 випромінюючих діодів у першій площині сканування, визначають пеленги n випромінюючих діодів у другій площині сканування шляхом моделювання просторового обертання площини геометричного розташування n випромінюючих діодів, визначають геометричне місце розташування щонайменше одного з випромінюючих діодів, розташованого за межами першої площини сканування, а потім за відомими пеленгами n випромінюючих діодів знаходять невідомий пеленг випромінюючого діода, розташованого за межами першої зони сканування, і визначають положення осі візування, враховуючи певні пеленги випромінюючих діодів нашоломного вузла.
2. Пристрій для визначення орієнтації осі візира, що містить нашоломний вузол з фотоелементами і візир, розміщені на захисному шоломі, скануючі блоки з приводом та фотоприймачами, пристрій визначення первинних кутів сканування та пристрій визначення лінії візування, який відрізняється тим, що в нього введені схеми управління, регістри зберігання та блоки визначення виходу фотоелемента із зони сканування, які складаються із схем порівняння, входи яких з'єднані з виходами пристрою визначення первинних кутів сканування і датчика опорного сигналу, а виходи - з входами схем управління, схем дозволу перезапису і схем обнулення регістрів зберігання, другі входи двох останніх з'єднані з пристроєм визначення первинних кутів сканування, а схеми управління - з виходами регістрів зберігання, які також з'єднані із входом пристрою визначення лінії візування, причому входи регістрів зберігання, лічильні та управляючі, з'єднані відповідно з виходами схем дозволу перезапису та схем обнулення, а виходи схем управління з'єднані відповідно зі входами суматора і схеми визначення приросту, вихід якої з'єднаний з другим входом суматора, а вихід суматора з'єднаний з одним із входів схеми дозволу перезапису.
Текст
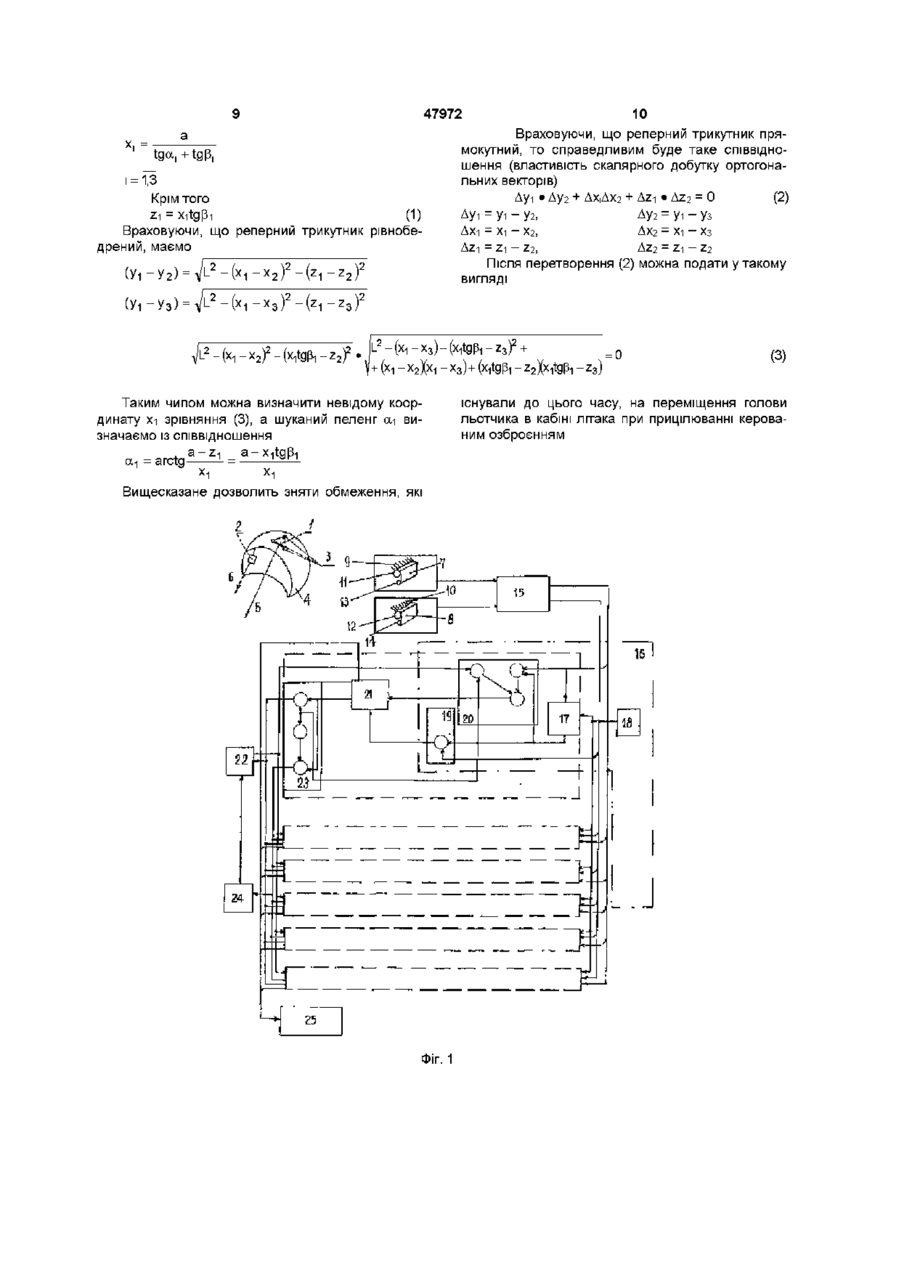
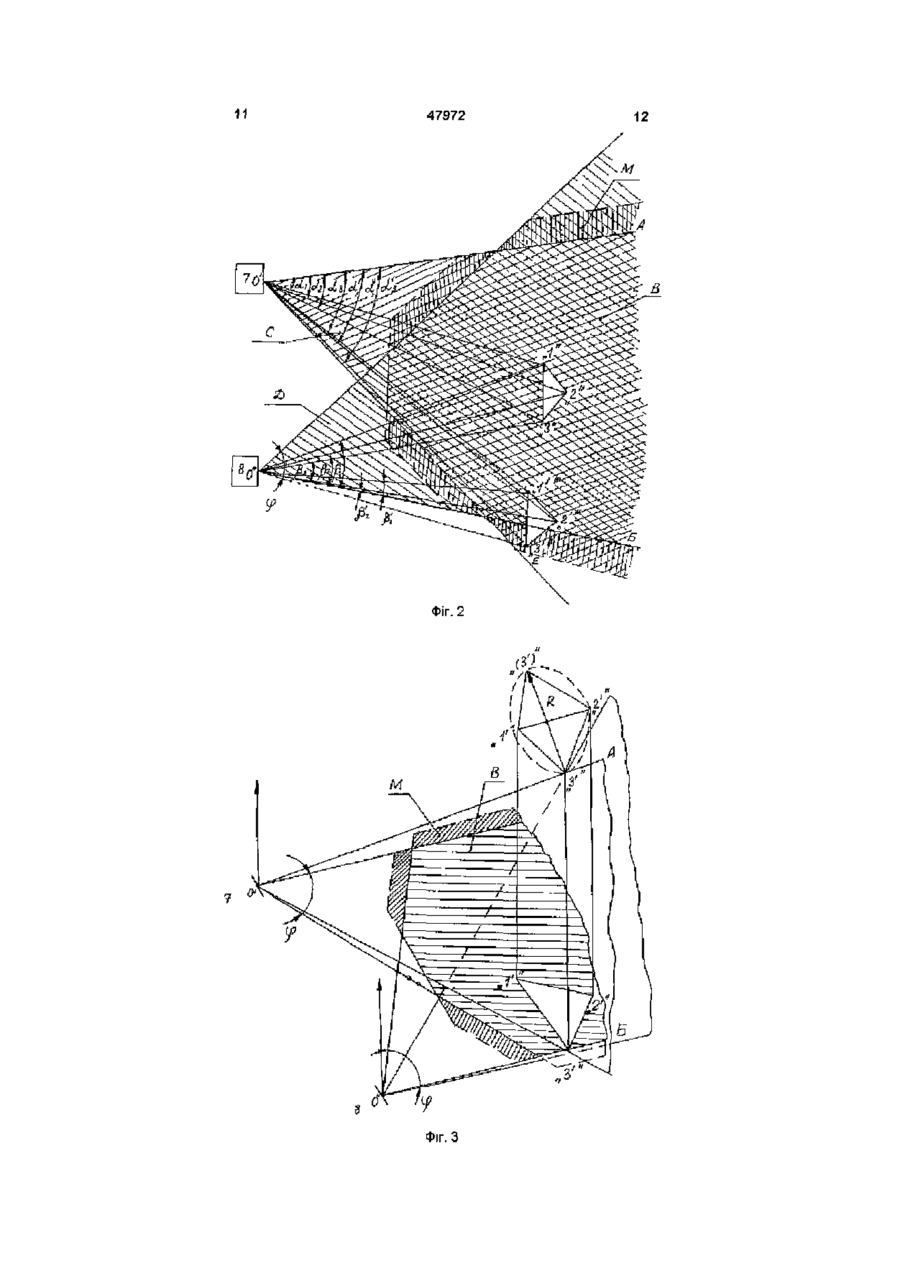
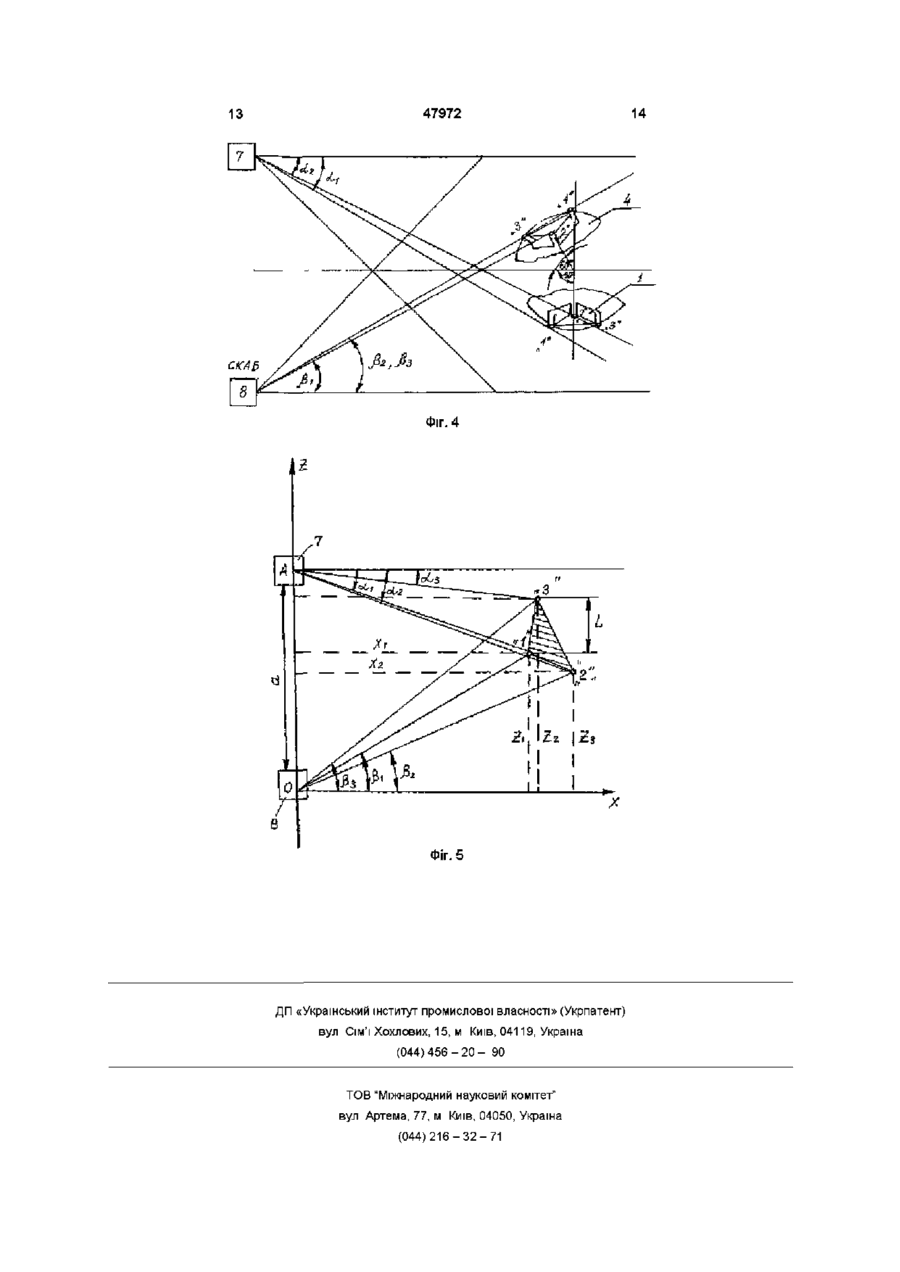
1 Спосіб визначення орієнтації осі візира, до складу якого входить сканування простору розміщення нашоломного вузла з п випромінюючими діодами плоскими оптичними віяловими променями, визначення первинних пеленгів на кожний з п випромінюючих ДІОДІВ та положення п випромінюючих ДІОДІВ у просторовій площині, яка проходить через реперні точки нашоломного вузла, в яких розміщені випромінюючі діоди, який відрізняється тим, що сканують просторову площину розміщення п випромінюючих ДІОДІВ із різних просторових точок, враховуючи геометричну сталість розміщення випромінюючих ДІОДІВ в реперних точках та часткове накладання площин сканування одна на одну, визначають пеленги щонайменше п-1 випромінюючих ДІОДІВ у першій площині сканування, визначають пеленги п випромінюючих ДІОДІВ у другій площині сканування шляхом моделювання просторового обертання площини геометричного розташування п випромінюючих ДІОДІВ, визначають геометричне місце розташування щонайменше одного з випромінюючих ДІОДІВ, розташованого за межами першої площини сканування, а потім за відомими Винахід відноситься до оптико-механічних і оптико-електронних систем і може бути використаний в системах наведення, системах управління авіаційними комплексами Існує спосіб визначення орієнтації осі візира, патент США №3 375 375, суть якого в тому, Ідо за допомогою скануючих фотоприймальних блоків визначається кутове положення джерел випромінювання (фотоелементів) шляхом поелементної пеленгації Визначають площину у просторі, яка проходить через ці точки і встановлюють до неї пеленгами п випромінюючих ДІОДІВ знаходять невідомий пеленг випромінюючого діода, розташованого за межами першої зони сканування, і визначають положення осі візування, враховуючи певні пеленги випромінюючих ДІОДІВ нашоломного вузла 2 Пристрій для визначення орієнтації осі візира, до складу якого входить нашоломний вузол з фотоелементами і візир, розміщені на захисному шоломі, скануючі блоки з приводом та фотоприймачами, пристрій визначення первинних кутів сканування та пристрій визначення лінії візування, який відрізняється тим, що до його складу введені схеми управління, регістри зберігання та блоки визначення виходу фотоелемента із зони сканування, які складаються із схем порівняння, входи яких з'єднані з виходами пристрою визначення первинних кутів сканування і датчика опорного сигналу, а виходи - з входами схем управління, схем дозволу перезапису і схем обнуления регістрів зберігання, другі входи двох останніх з'єднані з пристроєм визначення первинних кутів сканування, а схеми управління - з виходами регістрів зберігання, які також з'єднані із входом пристрою визначення лінії візування, причому входи регістрів зберігання, ЛІЧИЛЬНІ та управляючі, з'єднані ВІДПО ВІДНО з виходами схем дозволу перезапису та схем обнуления, а виходи схем управління з'єднані ВІДПОВІДНО зі входами суматора і схеми визначення приросту, вихід якої з'єднаний з другим входом суматора, а вихід суматора з'єднаний з одним із входів схеми дозволу перезапису перпендикуляр, який є колінеарним до осі візира Існують оптико-електронні пристрої дистанційного визначення орієнтації нашоломного візира, патенти США - №№ 3 678 823, 4 209 254, 3 375 375, 3 917 412, патенти Франції №№ 2 076 693, 2 168 425, виконані за схемою поелементної пеленгації джерел випромінювання (випромінюючих ДІОДІВ), розташованих на захисному шоломі і орієнтованих відносно осі візира, коли за сигналами кутів-пеленпв, які визначаються скануючими фотоприймальними блоками, розрахо о> 47972 вується просторове положення джерел випромінювання, тобто і кутове положення оптичної осі нашоломного візира Недоліком відомих способів та пристроїв (аналогів) є обмеження зони переміщення нашоломного вузла, яка обмежена спільною зоною сканування усіх скануючих блоків, та обмеження кутів розвороту нашоломного вузла через затінення одного з реперних елементів конструкцією захисного шолома Найбільш близьким за технічними характеристиками до запропонованого є спосіб визначення орієнтації осі візира (див технічну документацію на виріб "Сура", свідоцтво виключної правомочності КП "ЦКБ "Арсенал", ВП № 780) використаний як прототип Відомий спосіб полягає в тому, що за допомогою скануючих фотоприймальних блоків (СКАБ каналу А і СКАБ каналу Б) визначають положення випромінюючих ДІОДІВ у просторі за первинними кутами-пеленгами на кожний випромінюючий діод, визначають площину у просторі, яка проходить через три точки і визначають перпендикуляр до даної площини До недоліків способу-прототипу відносяться - обмежена зона переміщення нашоломного вузла, - обмеження кутів розвороту в просторі нашоломного вузла Існує система визначення орієнтації осі візира (див технічну документацію на виріб "Сура", Свідоцтво виключної правомочності КП "ЦКБ "Арсенал", ВП № 780) використана як прототип Відома система включає нашюломний вузол, до складу якого входять випромінюючі діоди, два скануючих блока (СКАБ), які перетворюють оптичні сигнали від випромінюючих ДІОДІВ В електричні, блок визначення кодів пеленгів, який визначає значення первинних пеленгів на випромінюючи діоди (ВД) (си, а2, а 3 , рі, р2, рз) У двійковому коді, обчислювальний пристрій, який визначає за значеннями первинних пеленгів положення лінії візування (cpz, фу) в системі координат об'єкта Зона сканування кожного скануючого блока обмежена 50° , а діапазон кутових переміщень приблизно ±60° Зона сканування обмежена конструктивними можливостями виконання скануючих блоків та взаємним розташуванням їх в кабіні літального апарата Ці вимоги дуже жорсткі і тому накладають обмеження як на зону сканування кожного скануючого блока, так і на сумарну зону переміщення нашоломного вузла (НВ) Таким чином, до недоліків системи прототипу ВІДНОСЯТЬСЯ - обмеження зони переміщення нашоломного вузла, - обмеження кутів розвороту нашоломного вузла При розробці способу, що заявляється, визначення орієнтації осі візира, в даному випадку, для нашоломного вузла, вирішувалась задача розширення діапазону кутових переміщень голови оператора (льотчика) щонайменше на 50%, ±90° , і збільшення робочої зони , в якій відбувається пеленгація, на ~ 40% Для вирішення поставленої задачі у відомому способі визначення орієнтації осі візира, який включає сканування простору знаходження нашоломного вузла з ті випромінюючими діодами плоскими оптичними віяловими променями, визначення первинних пеленгів на кожний з т|, випромінюючих ДІОДІВ і положення г| випромінюючих ДІОДІВ у просторовій площині, яка проходить через реперні точки нашоломного вузла, в яких розташовані випромінюючі діоди, сканують просторову площину розташування г| випромінюючих ДІОДІВ із різних просторових точок, враховуючи геометричну ПОСТІЙНІСТЬ розміщення випромінюючих ДІОДІВ в реперних точках та часткового накладення площин сканування одна на одну, визначають пеленги щонайменше (г|-1)випромінюючих ДІОДІВ у першій площині сканування, визначають пеленги г| випромінюючих ДІОДІВ у другій площині сканування , за допомогою моделювання просторового обертання площини геометричного розміщення г| випромінюючих ДІОДІВ визначають геометричне місце розміщення щонайменше одного випромінюючого діода, розташованого поза першою зоною сканування і визначають положення осі візування Таким чином роблять обчислення координат випромінюючого діода, який вийшов із зони сканування одного із СКАБ, за інформацією від інших випромінюючих ДІОДІВ від цього ж СКАБ та інформації від усіхвипромінюючих ДІОДІВ іншого СКАБ Тобто визначаємо шостий невідомийпеленг за п'ятьма відомими (при трьох випромінюючих діодах і двох СКАБ) (наприклад, Рз за відомими ои, аг, аз, Рі, Рг) Основною передумовою для цього є те, що геометричні розміри між випромінюючим діодами не змінюються Трикутник, в кутах якого розташовані випромінюючі діоди, виконано жорстко Положення у просторі невідомого пеленга визначається математично "обертанням" трикутника навколо протилежної сторони випромінюючого діода, який вийшов із зони сканування, який при "обертанні" створює коло, яке с геометричним місцем шуканої точки Дане коло пересікається віяловим пучком від СКАБ у двох точках, одна з яких с реальною (шуканою), а друга - уявною, тобто поставлена задача вирішується за рахунок того, що геометричним місцем невідомого пеленга є коло, яке утворюється при обертанні реперного трикутника нашоломного вузла навколо сторони, протилежної випромінюючому діоду, який вийшов за мела зони сканування Дане коло пересікає площина, утворена віяловим пучком від скануючого блока, із поля зору якого даний випромінюючий діод не вийшов При пересіченні утворюються дві точки, одна з яких є шуканим пеленгом , а друга - уявна При розробці пристрою, що заявляється , вирішувалась задача розширення зони переміщення нашоломного вузла без ускладнення пристрою та збереження його вагових та габаритних характеристик Для вирішення поставленої задачі у відомий пристрій визначення орієнтації осі візира, до складу якого входить нашоломний вузол з фотоелементами та візир, які розміщені на захисному шоломі, 47972 а також скануючі блоки з приводом та фотоприймальниками, пристрій визначення первинних кутів сканування і пристрій визначення, осі візування, додатково введені схеми управління, репсгри зберігання і блоки визначення виходу фотоелемента із зони сканування, які складаються із схеми порівняння, входи якої з'єднані з виходами пристрою визначення первинних кутів сканування і датчика опорного сигналу, а виходи - зі входами схем управління, схем дозволу перезапису і схем обнуления регістрів зберігання, другі входи двох останніх з'єднані з пристроєм визначення первинних кутів сканування , а схеми управління - з виходами регістрів зберігання, які також з'єднані зі входом пристрою визначення осі візування, причому, входи регістрів зберігання, ЛІЧИЛЬНІ та керуючі, з'єднані ВІДПОВІДНО з виходами схем дозволу перезапису та схем обнуления, а виходи схем управління з'єднані ВІДПОВІДНО зі входами суматора та схеми визначення приросту, вихід якої з'єднано з другим входом суматора, вихід суматора з'єднаний з одним із входів схеми дозволу перезапису Таким чином, задача, яка стояла перед авторами при розробці пристрою, що заявляється, може бути вирішена за рахунок введення у відомий пристрій визначення орієнтації осі візира блока визначення виходу фотоелемента із зони сканування, схеми управління, суматора і схеми визначення приросту, які дозволяють отримати інформацію про положення фотоелемента, який вийшов за меж зони сканування одного із СКАБ, за даними про просторове положення цього фотоелемента від інших скануючих блоків та даних про положення інших фотоелементів від усіх скануючих блоків Суть запропонованого винаходу пояснюється кресленнями , де зображені фіг 1 - блок-схема запропонованого пристрою, фіг 2 - положення реперних елементів (випромінюючих ДІОДІВ) та СКАБ, а також переміщення НВ в зоні сканування, фіг 3 - просторове положення НВ в зоні сканування, фіг 4 - зони розширення кутових діапазонів, фіг 3 - до розрахунку формульних залежностей До складу запропонованого пристрою (фиг 1) входить НВ І, який містить в собі візир 2, фотоелементи 3, установлені на захисному шоломі 4 таким чином, що їх просторове положення формує ЛІНІЮ 5 (перпендикуляр до площини, яка проходить через три точки-репери ) колінеарну осі 6 візира 2 Визначення положення фотоелементів 3 відбувається за допомогою скануючих блоків 7, 8 розташованих жорстко в певних місцях на об'єкті Скануючі блоки складаються з генераторівформувачів віялових пучків 9, 10, які сканують простір за допомогою приводів 11, 12, а також з фотоприймальних пристроїв 13,14 Пристрій визначення первинних кутів сканування 15 за даними скануючих блоків 7, 8 визначає первинні куга сканування, тобто пеленги на реперні точки Блок визначення виходу фотоелемента із зони сканування 16 складається з - схем порівняння 17, які порівнюють інформацію від пристрою визначення первинних кутів 15 та від датчика опорного сигналу 18, який може бути потенціометричного типу або регістром з певним кодом, - схем обнуления 19, які при перебільшенні поточної інформації над опорною забороняють скид попередньої відповідної інформації Схеми обнуления 19 виконані на базі логічних схем "І АБО-НІ", - схем дозволу перезапису 20, які за командою від схеми порівняння 17 вимикають від входу регістра зберігання 21 пристрій визначення первинних кутів 15, а вмикають вихід суматора 22 Схеми дозволу перезапису 20 виконані на основі логічних схем " І - А Б О - НІ" Регістри зберігання 21 зберігають поточну інформацію, яка надходить з пристрою визначення первинних кутів 15, або обчислену інформацію з суматора 22 Виходи регістрів зберігання 21 за командою від схеми порівняння 17 надходять через схеми управління 23 або на суматор 22 (попереднє значення пеленга, який вийшов за межі зони сканування фотоелемента), або па схему визначення приросту 24 (значення усіх інших пеленгів, крім пеленга, який вийшов із зони фотоелемента), яка складається з мікропроцесорного блока серії 582, для визначення приросту значення попередньої інформації про пеленг на фотоелемент З, який вийшов із зони сканування Значення приросту підсумовується в суматорі 22 з попереднім значенням пеленга , який зберігається в регістрі зберігання 21 Після підсумовування відбувається перезапис до регістру зберігання 21 інформації про нове значення пеленга В інформації, яка надходить ч регістрів зберігання 21 до пристрою визначення лінії візування 25, для обчислення положення осі візира беруть участь і значення обчисленого пеленга на реперну точку, яка вийшла із зони сканування Даний пристрій може бути виконано на основі стандартизованої елементної бази Пристрій працює таким чином Генератори, формувачі віялових пучків 9, 10 (фиг 1) , формують оптичні ВІЯЛОВІ пучки Сканування простору, в якому знаходиться НВ І з фотоелементами 3, віяловими оптичними пучками виконуються приводами 11, 12 Імпульси початку відліку ( опорні імпульси) формуються при проходженні віялових пучків через фотоелементи пристрої 13, 14 СКАБ 7, 8 ВІДПОВІДНО Опорні імпульси від кожного СКАБ надходять в пристрій визначення первинних кутів сканування 15, в якому при цьому починається ЛІЧІННЯ тактових імпульсів Зупинка лічби відбувається імпульсом, який виробляється при проходження віялового оптичного пучка через фотоелементи З нашоломного вузла 1 Число тактових імпульсів пропорційно кутовим положенням фотоелементів З відносно СКАБ 7, 8 На фіг 2 це кути ои, аг, аз, Рі, р2,Рз Положення віялового пучка на час формування опорного імпульсу і створює зовнішню межу зони переміщення НВ І (на фіг 2 це промені О' А і О"Б) Цє положения обумовлене можливим розташуванням формувачів віялових пучків 9, 10 та фотоелементних пристроїв 13, 14 При виконанні вимог до точності пеленгації та 47972 габаритів скануючи блоків 7, 8, до їх розташування в кабіні, робочий куг розвороту віялового пучка (f дорівнює 45-50°, що приводить до обмеження зони переміщення НВ І На фіг 2 зображено зони сканування кожного скануючого блока 7, 8 - це зони С і Д ВІДПОВІДНО, зона переміщення нашоломного вузла - зона В, положення нашоломного вузла 1 ~ " 1 " ' .. '2 і " - "З"' відповідає випадку виходу крайнього фотоелемента 3 із загальної зони, М - зона переміщення НУ, забезпечена запропонованим пристроєм При цьому у пристрої визначення первинних кутів сканування 15 є така інформація про кутове положення фотоелементів a/, a-J, аз', Рі', Рг' інформація Рз' відсутня Лічильник тактових імпульсів пристрою визначення первинних кутів сканування 15 переповнюється, тому що відсутній імпульс зупинки лічби від фотоелемента 3 При наявності в лічильнику Рз інформації, яка перевищує по значенню встановлену в датчику опорного сигналу 18, схема порівняння 17 каналу Рз посилає імпульс, який забороняє проходження через схему обнулення 19 обнулюючого регістра зберігання 21 імпульсу(ним є передній фронт опорного імпульсу ) СКАБ 8 Тобто у регістрі зберігання 21 каналу Рз залишається попередня інформація про положення фотоелемента 3 відносно СКАБ 8, а в інших каналах інформація обновлюється Крім того імпульс зі схеми порівняння 17 каналу Рз забороняє перепис нової інформації з пристрою визначення первинних кутів сканування 15 до регістра зберігання 21 каналу Рз Через схеми управління 23 інформація з регістра зберігання 21 надходить на суматор 22, але тільки з регістра зберігання 21 того каналу, який фіксує вихід фотоелемента 3 із зони сканування, у даному випадку каналу Рз Уся інша інформація надходить на схему визначення приросту 24, яка визначає приріст до попереднього значення пеленга Рз, приріст обчислюється рішенням системи рівнянь, де одне рівняння - це рівняння площини реперного трикутника у просторі, розташування якої невизначено, вона може займати довільне положення навколо прямої " 1 " - "2", друге рівняння - це рівняння площини, сформованої віяловим пучком від СКАБ 7, який проходить через реперну точку " З'" Рішенням системи рівнянь є точки пересічення цих площин, які розташовані на колі, створеному реперною точкою, яка вийшла за межі зони сканування СКАБ 8, при обертанні реперного трикутника " 1 " ~ "2" - "З" навколо певної у просторі лінії " 1 " "2" і належить площині віялового пучка СКАБ 7 через точку "З" Фізичний ЗМІСТ визначення показано на фіг З, Де В - зона переміщення НВ, яка забезпечується зонами сканування СКАБ 7, 8, М - зона переміщення НВ, в якій забезпечується робота за допомогою запропонованого пристрою Основною передумовою с те, що геометричні розміри між елементами " 1 " - "2" "З" не змінюються Цей прямокутник обертається і перемочується в зоні сканування Якщо він займає положення "1"' - "2 3'" , то точка "З"' виявляється за межами зони сканування СКАБ 8, але пеленгуєть 8 ся СКАБ 7, утворюючи площину О'АБ, отже точка "З"' належить до площини О'АБ Просторове положення відрізка " 1 " - "2" визначено у просторі даними a/, a-J, аз', Рі', Рг' від СКАБ7, 8 Точка "З"' може бути визначена обертанням трикутника " 1 " ' - "2"' - "З"' навколо лінії " 1 " ' - "2' " , тобто точка "З"' описує коло радіусом R , яка перетинає площину в точці, яка відноситься до площини О'АБ та трикутнику "1'" - "2"' - "З"', тобто є можливість визначити приріст значення пеленга на точку "З"' від СКАБ 8, що і визначається схемою визначення приросту 24 Цей приріст підсумовується у суматорі 22 з попереднім значенням пеленга на точку "З"' - Рз', який зберігається в регістрі зберігання 21, визначається поточне просторове знаходження точки "З"' вже за межами зони сканування СКАБ 8 Інформація про новий пеленг Рз' з суматора 22 записується до ВІДПОВІДНОГО регістра зберігання 21 через схему дозволу перезапису 20, яка вимкнула за командою від схеми порівняння 17 пристрій визначення первинних кутів сканування 15 від регістра зберігання 21 цього каналу і підключила сумаор 22 Після перезапису інформація про просторове знаходження реперних точок з усіх регістрів зберігання 21 надходить до пристрою визначення лінії візування 25 На фіг 4 зображено кутові діапазони розвороту НВ І пристрою, який пропонується У відомому пристрої вони обмежені затіненням реперної точки конструкцією захисного шолома 4, а в запропонованому пристрої, пеленг на затінену реперну точку ВІДНОВЛЮЄТЬСЯ У порівнянні з базовим об'єктом, за основу якого взято виріб "Сура", у якого зона сканування кожного скануючого блока обмежена 50°, а діапазон кутових переміщень приблизно ± 60°, в запропонованому пристрої за рахунок введення блока визначення виходу реперної точки із зони сканування , схеми визначення приросту і суматора, зона переміщення НВ збільшена на величину , яка дорівнює геометричному розміру між фотоелементами "1 - 3 " і "1 - 2", що відображено на фіг 2, З (зона М), тобто відбувається збільшення обсягу дозволених переміщень голови льотчика в кабіні літака на 40% Збільшення діапазону кутових переміщень у порівнянні з базовим об'єктом дорівнює 50%, що зображено на фіг 4 Переглянемо висновок формульних залежностей - фіг 5, де " 1 , " "2," "З" - проекції випромінюючих ДІОДІВ на площину XOZ, 7, 8 - скануючі фотоприймальні блоки СКАБ-А і СКАБ-Б, а,і, p. - пеленги, що виміряються за допомогою СКАБ, Х|, у, Z, (і = 1,3) - розраховані за пеленгами координати ВД, L - відстань між першим і другим випромінюючими діодами, а - відстань між скануючим блоками З геометричної побудови фіг 5 робимо висновок, що координати випромінюючих ДІОДІВ можна отримати за допомогою формул 4 7 9 7 2 X, =t g o t , + t g p , Крім того zi = xitgpi (1) Враховуючи, що реперний трикутник рівнобедрений, маємо (Уі (Уі У2) = V L 1 0 Враховуючи, що реперний трикутник прямокутний, то справедливим буде таке співвідношення (властивість скалярного добутку ортогональних векторів) 2 - ( X I - X 2 ) 2 - ( Z I - Z 2 ) Дуі • Дуг + АХ|ДХ2 + Azi • AZ2 = 0 Ауі = Уі - у 2 , (2) АУ2 = Уі — Уз ДХі = Х-і - Х2, АХ2 = Хі - Хз AZi = Z-i - Z2, AZ2 = Zi - Z2 Після перетворення (2) можна подати у такому вигляді 2 -Z -z 3 Таким чипом можна визначити невідому координату хі зрівняння (3), а шуканий пеленг ои визначаємо із співвідношення Вищесказане дозволить зняти обмеження, які Фіг. 1 (3) існували до цього часу, на переміщення голови льотчика в кабіні літака при прицілюванні керованим озброєнням 11 47972 Фіг. 2 Фіг. З 12 13 47972 Фіг. 4 Фіг. 5 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 14
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of a tracker axis direction determination and a uniit for its implementation
Автори англійськоюCherniak Serhii Ivanovych
Назва патенту російськоюСпособ определения ориентации оси визира и устройство для его реализации
Автори російськоюЧерняк Сергей Иванович
МПК / Мітки
МПК: F41G 3/22
Мітки: реалізації, візира, осі, спосіб, орієнтації, пристрій, визначення
Код посилання
<a href="https://ua.patents.su/7-47972-sposib-viznachennya-oriehntaci-osi-vizira-i-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення орієнтації осі візира і пристрій для його реалізації</a>
Спосіб визначення орієнтації осі візира та нашоломна система цілевказування для його реалізації
Номер патенту: 47969
Опубліковано: 15.09.2003
Автори: Ліпунова Валентина Григорівна, Черняк Сергій Іванович, Кадочніков Сергій Михайлович
МПК: F41G 3/22
Мітки: орієнтації, нашоломна, візира, реалізації, визначення, система, цілевказування, спосіб, осі
Формула / Реферат:
1. Спосіб визначення орієнтації осі візира, суть якого полягає в скануванні простору, в якому знаходиться нашоломний вузол із випромінюючими діодами, плоскими віяловими оптичними променями, визначенні первинних пеленгів на кожний випромінюючий діод на момент проходження через випромінюючі діоди віялових оптичних променів, визначенні положення нашоломного вузла у просторі та визначенні орієнтації осі візира, який відрізняється тим, що...
Спосіб визначення орієнтації осі візира та нашоломна система цілевказівки для його реалізації
Номер патенту: 47969
Опубліковано: 15.07.2002
Автори: Ліпунова Валентина Григорівна, Кадочніков Сергій Михайлович, Черняк Сергій Іванович
МПК: F41G 3/22
Мітки: система, візира, визначення, спосіб, орієнтації, нашоломна, реалізації, осі, цілевказівки
Формула / Реферат:
1. Спосіб визначення орієнтації осі візира, суть якого полягає в скануванні простору, в якому знаходиться нашоломний вузол із випромінюючими діодами, плоскими віяловими оптичними променями, визначенні первинних пеленгів на кожний випромінюючий діод на момент проходження через випромінюючі діоди віялових оптичних променів, визначенні положення нашоломного вузла у просторі та визначенні орієнтації осі візира, який відрізняється тим, що...
Пристрій визначення орієнтації осі візира
Номер патенту: 30199
Опубліковано: 15.11.2000
Автори: Беляєва Галина Григорівна, Полєжаєв Віктор Вікторович, Черняк Сергій Іванович, Плита Олександр Андрійович
МПК: G02B 23/00
Мітки: орієнтації, пристрій, визначення, візира, осі
Формула / Реферат:
Пристрій визначення орієнтації осі візира, що містить візир, встановлений на рухомій основі, наприклад, на захисному шоломі оператора, складений із освітлювача, марки (сітки), об'єктиву та нахиленої плоскопаралельної пластини, який відрізняється тим, що до нього введено блок вимірювання параметрів розвороту, блок завдання початку відліку, запам'ятовуючий пристрій, суматор та інтегратор, а до візиру додатково встановлено у фокальній поверхні...
Пристрій визначення орієнтації осі візира
Номер патенту: 30190
Опубліковано: 15.11.2000
Автори: Черняк Сергій Іванович, Полєжаєв Віктор Вікторович, Плита Олександр Андрійович, Бузанов Віктор Іванович, Беляєва Галина Григорівна
МПК: G02B 23/00
Мітки: визначення, осі, візира, орієнтації, пристрій
Формула / Реферат:
Пристрій визначення орієнтації вісі візира, який містить в собі візир, встановлений на рухомій основі, наприклад, на захисному шоломі оператора, складений із освітлювача, марки (сітки), об'єктиву і похилої напівпрозорої пластини, який відрізняється тим, що в його склад введені блок виміру параметрів розвороту, блок задання початку відліку, блок корекції, блок інтеграторів, косинусний перетворювач і пристрій поділу, а в візир введений...
Пристрій визначення орієнтації осі візира
Номер патенту: 30189
Опубліковано: 15.05.2003
Автори: Черняк Сергій Іванович, Беляєва Галина Григорівна, Плита Олександр Андрійович
МПК: G02B 23/00
Мітки: пристрій, визначення, візира, орієнтації, осі
Формула / Реферат:
Пристрій визначення орієнтації осі візира, що містить візир, встановлений на рухомій основі, наприклад на захисному шоломі оператора, складений із освітлювача, марки /сітки/, об'єктива і похилої плоскопаралельної пластини, який відрізняється тим, що в його склад введені блок виміру параметрів розвороту, блок задання початку відліку, блок корекції, блок нелінійних перетворень, блок множення, перший та другий суматори, пристрій поділу та блок...
Попередній патент: Пристрій для розчистки копитець
Наступний патент: Шихта для виготовлення керамічних виробів
Випадковий патент: Низькоемісійний газовий пальник трубчастого типу з направленим повітряним потоком