Пристрій визначення орієнтації осі візира
Номер патенту: 30189
Опубліковано: 15.05.2003
Автори: Беляєва Галина Григорівна, Черняк Сергій Іванович, Плита Олександр Андрійович
Формула / Реферат
Пристрій визначення орієнтації осі візира, що містить візир, встановлений на рухомій основі, наприклад на захисному шоломі оператора, складений із освітлювача, марки /сітки/, об'єктива і похилої плоскопаралельної пластини, який відрізняється тим, що в його склад введені блок виміру параметрів розвороту, блок задання початку відліку, блок корекції, блок нелінійних перетворень, блок множення, перший та другий суматори, пристрій поділу та блок інтеграторів, при цьому блок виміру параметрів розвороту механічно спряжений з візиром, вихід блока задания початку відліку з'єднаний з четвертими входами блока корекції і блока інтеграторів, перший, другий і третій входи блока корекції з'єднані відповідно з першим, другим і третім виходами блока виміру параметрів розвороту, а його другий і третій виходи з'єднані відповідно з третім і четвертим входами блока множення, перший вихід блока корекції з'єднаний з третім входом блока інтеграторів, перший і третій виходи блока інтеграторів з'єднані відповідно з другим і першим входами блока нелінійних перетворень, перший і другий виходи блока множення з'єднані відповідно з першим і другим входами першого суматора, а його третій і четвертий виходи - відповідно з першим і другим входами другого суматора, перший і другий виходи блока нелінійних перетворень з'єднані відповідно з першим і другим входами блока множення, другий вхід пристрою поділу з'єднаний з третім виходом блока нелінійних перетворень, перший вхід - з виходом другого суматора, а його вихід - з першим входом блока інтеграторів, вихід першого суматора з'єднаний з другим входом блока інтеграторів, перший та другий виходи блока інтеграторів з'єднані з системами об'єкта.
Текст
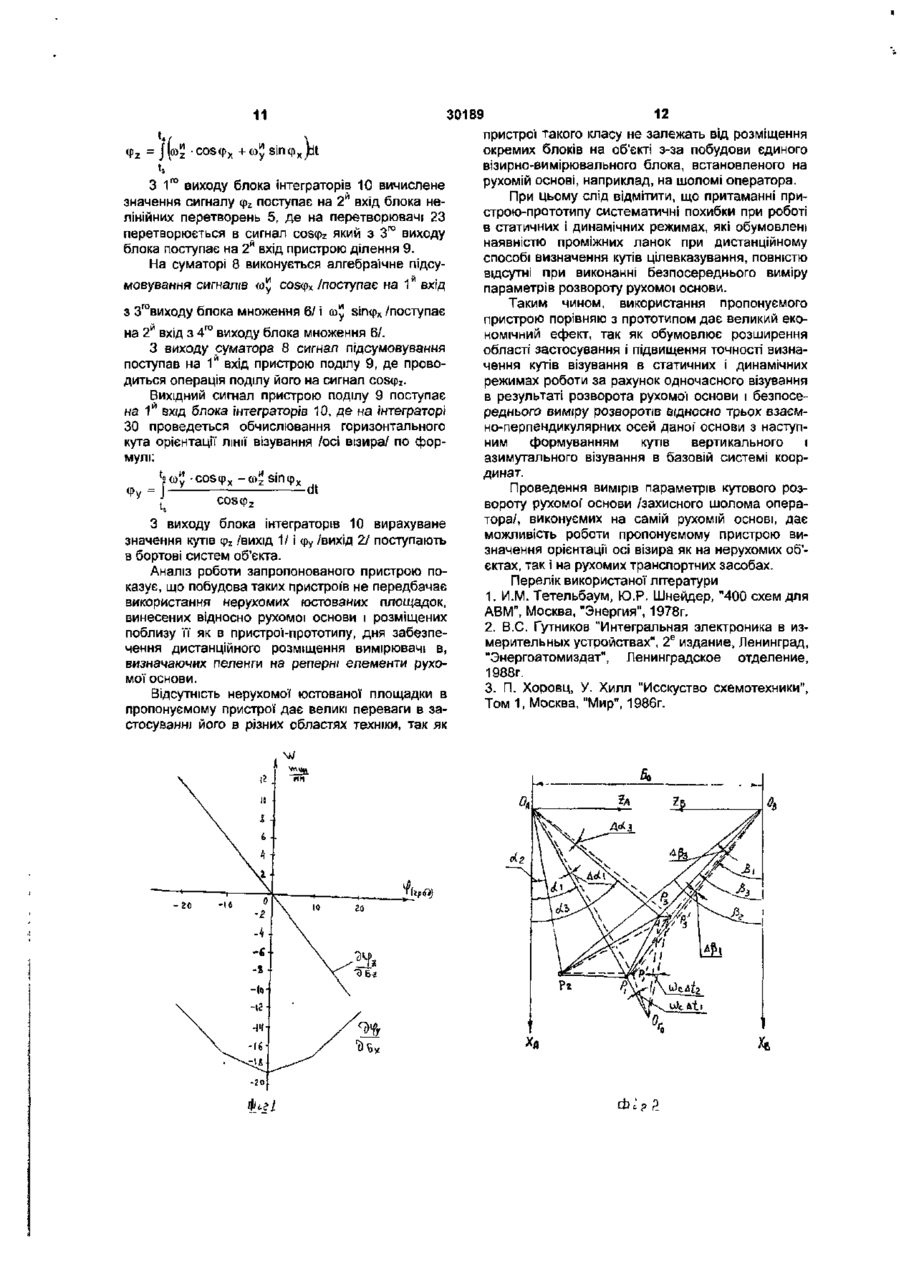
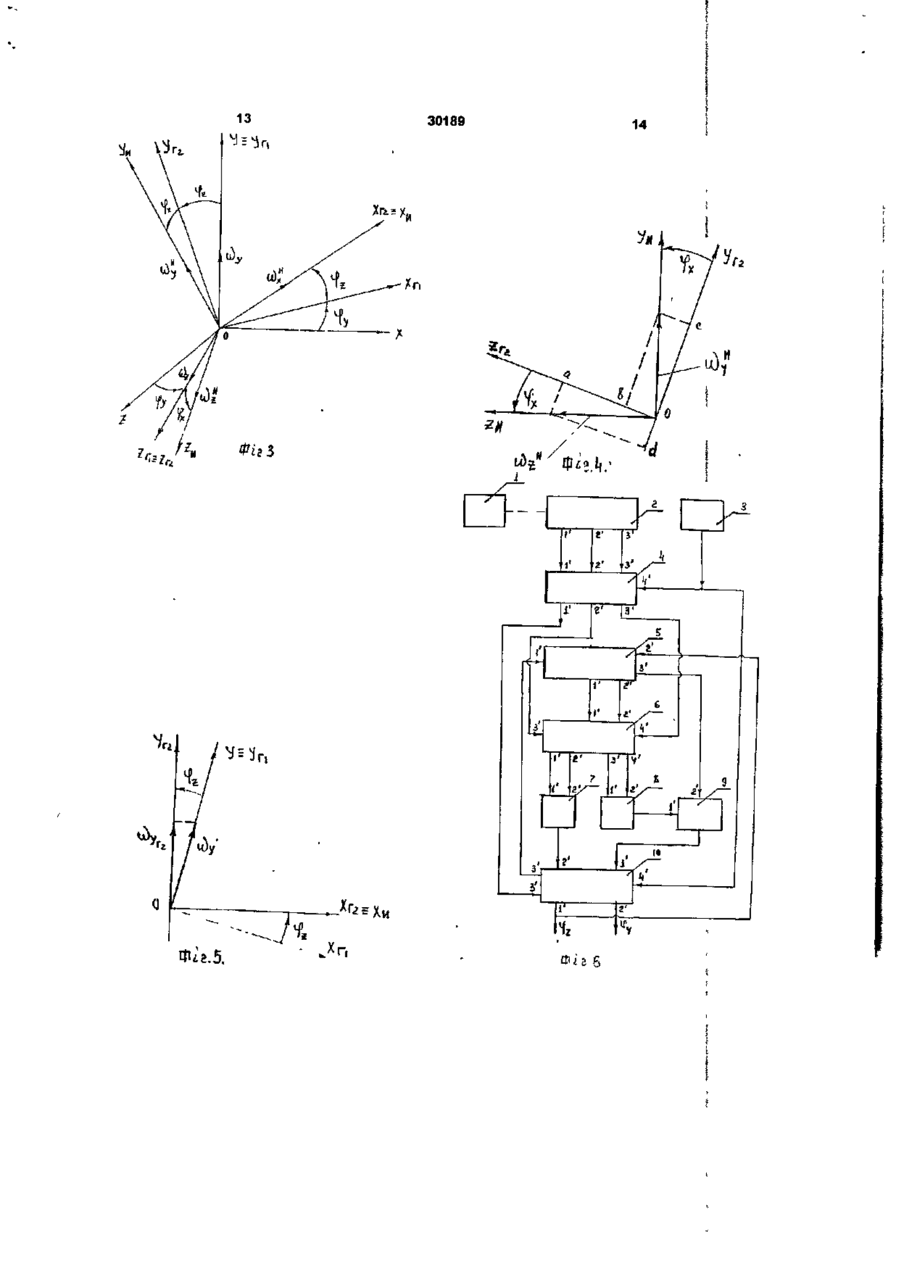
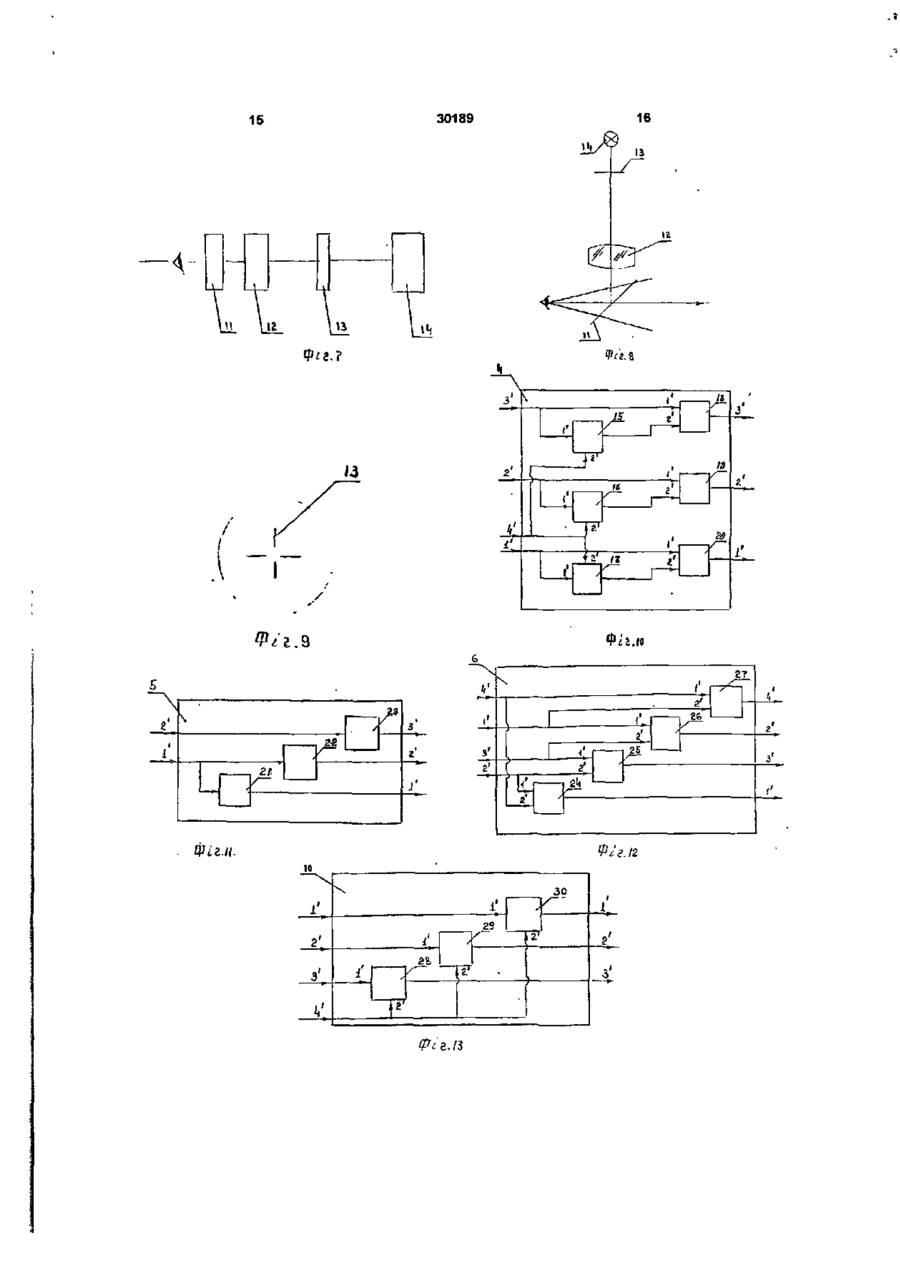
Пристрій визначення орієнтації осі візира, що містить візир, встановлений на рухомій основі, наприклад на захисному шоломі оператора, складений із освітлювача, марки /сітки/, об'єктива і похилої плоскопаралельноі пластини, який відрізняється тим, що в його склад введені блок виміру параметрів розвороту, блок задания початку відліку, блок корекції, блок нелінійних перетворень, блок множення, перший та другий суматори, пристрій поділу та блок інтеграторів, при цьому блок виміру параметрів розвороту механічно спряжений з візиром, вихід блока задания початку відліку з'єднаний з четвертими входами блока корекції і блока інтеграторів, перший, другий і третій входи блока корекції з'єднані ВІДПОВІДНО З першим, другим і третім виходами блока виміру параметрів розвороту, а його другий і третій виходи з'єднані відповідно з третім і четвертим входами блока множення, перший вихід блока корекції з'єднаний з третім входом блока інтеграторів, перший і третій виходи блока інтеграторів з'єднані відповідно з другим і першим входами блока нелінійних перетворень, перший і другий виходи блока множення з'єднані відповідно з першим і другим входами першого суматора, а його третій і четвертий виходи - відповідно з першим і другим входами другого суматора, перший і другий виходи блока нелінійних перетворень з'єднані відповідно з першим і другим входами блока множення, другий вхід пристрою поділу з'єднаний з третім виходом блока нелінійних перетворень, перший вхід - з виходом другого суматора, а його вихід - з першим входом блока інтеграторів, вихід першого суматора з'єднаний з другим входом блока інтеграторів, перший та другий виходи блока інтеграторів з'єднані з системами об'єкта. Пропонуєме технічне рішення відноситься до галузі оптико-електронного приладобудування, в тому числі, але не виключно, до нашоломних систем візування, і може бути використано при розробці оптико-електронних систем визначення розворотів захисного шолома оператора в різних областях техніки. В теперішній час широко відомі структурні схеми побудови нашоломних систем візування, складених із оптико-локаційних блоків /ОЛБ/, розміщених на об'єкті реперного вузла, представляючого набір дискретних рознесених один від одного джерел /або приймачів/ випромінення, певним образом зоорінтованих відносно осі візира /ліни візування оператора/, встановлених на рухомій основі, електронного блока і обчислювача. Докладно склад відомих пристроїв і принцип їх роботи приведені в таких джерелах : шоломні засоби індикації і прицілювання, ВАРКТ, 1975, №3, стор. 24 * ЗО; патент США №3.375.375, №3.678.238, №4.193.689, Англії №1.520.154, №2.082.905. Аналіз відомих пристроїв визначення орієнтації осі візира показує, що в усіх пристроях базові оптико-електронні блоки жорстко виставлені на об'єкті, а візир з орієнтованими відносно його осі реперним елементами, встановлений на рухомій основі, наприклад, на шоломі оператора, і переміщується в процесі роботи відносно ОЛБ Створення такого типу пристрою засновано на способі дистанційного стеження за розворотом шолома, а визначення путів візування заключається в визначенні кутів просторової орієнтації осі візира при сполученні /накладенні/ візирного перехрестя з ціллю. Кути визначаються по відомій базовій відстані між ОЛБ, пеленгам на реперні елементи, виміряними ОЛБ і параметрам розміщення реперних елементів відносно осі візира. Формовані кутові координати поступають в канал и споживання об'єкта. Такі пристрої визначення кутів візування вимагають виміру кутового напрямку на кожний реперний елемент рухомої CM О О) 00 о со 30189 4 вої і лінійної установки формувачів віяльних пучків основи з допомогою спеціальних вимірювачів, висвітла і реперних елементів, а також похибками несених на відому відстань відносно реперних виміру пеленгів. Зміни статичних похибок обумовелементів і встановлених на нерухомій основі. лені відхиленням голови оператора від нульової Але не всі умови, в яких виникає необхідність лінГі візування і переміщенням її в заданій зоні. визначення кутів просторової орієнтації осі візира, Для прикладу на фіг 1 представлені криві функціовстановленого на рухомій основі, наприклад на нальної залежності відношень передачі шоломі оператора, задовольняють переліченим вище вимогам. Наприклад, такі пристрої неможли' Зф во використати дня видачі кутів візування операW в ВИХІДНІ кути пристроюю (фу; cpz) as. тором системам в польових умовах. До недостатків розглянутих систем відноситьпохибок ДБХ, ДБг встановлення вимірювачів пеленся також і другі, найбільш суттєвими із яких являгів на базову Б0(Бх;Бг) відстань в залежності від ються обмеження діапазоне переміщення t розвовідхилення голови оператора в горизонтальній (іру) роту голови оператора з-за складності забезпечені вертикальній (tpz) площині базової системи коорня великого поля огляду вимірювачів при малих динат. При цьому похибки вихідних кутів (Дфу; Дф2) габаритах пристроїв. визначаються наступним чином: Враховуючи вищесказане можна зробити висновок, що усунення вказаних недоліків дуже актуДБ Х Дф = -ДБ, ально в теперішній час, так як в значній мірі розширює область застосування нашоломних візирДинамічні похибки пристрою-прототипу вининих систем, побудованих на таких способах і дає кають в результаті кутових і лінійних коливань гоможливість застосування їх в різних областях техлови оператора на об'єкті, а також при візуванні ніки на різних об'єктах, в тому числі і в польових рухомих відносно оператора об'єктів з кутовою умовах. швидкістю шс під час проведення операції виміру Найбільш близьким по технічному рішенню до пеленгів. Схема виникнення похибок пристроюзаявляемого пристрою із відомих аналогів являпрототипа приведена на фіг.2. Із схеми фіг.2 видється пристрій визначення кутової орієнтації, опино, що після виміру пеленга, реперний елемент Р2, саний в матеріалах патента США №3.375.375. Дамомент виміру якого співпадає, наприклад, с почаний пристрій вибраний за прототип. тком цикла виміру /t B M M o = 0 / , оператор, голова Даний пристрій включає блок реперних елеякого здійснює коливання відносно фізіологічного ментів /фотоприймачів або випромінювачів/ з візиром, жорстко встановлених на рухомій основі, нацентра О г або супроводжує ціль с кутовою швидприклад, на шоломі оператора, базовий блок з кістю шс за час, проведений до відліку наступного двома формувачами віяльних пучків світла, встапеленга /Дії * 0/ на реперний елемент Рі розверновлених поблизу голови оператора і електронний тається відносно фізіологічного центру голови на блок, встановлені на нерухомій основі, наприклад, кут (ОсДіі, т о. вимір пеленга на реперний елемент на конструкції транспортного засобу. Пристрій працює наступним чином. Рі, проходить при зміщення його в точку Р1 АнаДва формувачі віяльних пучків світла сканують логічно проходить вимір пеленга на реперний простір усередині об'єкта установки. При суміщенелемент Рз при зміщенні його в точку Р3 .Таким ні віяльних пучків з любим із реперних елементів виконується ВІДЛІК і обробка поступившої інфорчином, при використанні пристрою-прототипу за мації, а також визначення з допомогою електрорахунок необхідності дистанційного виміру пеленнного блока значення пеленгів а, і р( на кожний гів на реперні елементи рухомої основи єдиним реперний елемент в системі координат формувавимірювальним каналом з властивими йому змічів віяльних пучків світла. При цьому пеленг а, щенням моментів виміру в часі, відбувається певимірюється першим формувачем, ар,- другим. рекручення реального контура розміщення реперПо виміряним пеленгам на реперні елементи них елементів /Рг, Рі , Рз замість Рг, Рі, Рз/, ЩО а,, р, і відомій базовій відстані між формувачами приводить до виникнення значних динамічних повіяльних пучків світла в пристрої визначаються хибок визначення кутів візування. кути розвороту /орієнтації/ осі візира % і tpz. Розрахунок похибок показує, що при викорисДля використання присторою-прототипу необтанні пристрою-прототипу динамічна похибка вихідна наявність вимірювачів, встановпених на незначення кутів візування в умовах супроводження рухомій основі і винесених відносно рухомої осноцілі оператором з кутовою швидкістю Ш = 207с с ви, з розміщеними на ній реперними елементами. досягає 50і при заданій зоні ЛІНІЙНИХ І кутових пеАле установка нерухомої площадки поблизу від реміщень. оператора і точне юстування вимірювачів відносно Таким чином, пристрою-прототипу притаманні базової системи координат не завжди можливо. такі недоліки: Наприклад, визначення кутів візування в польових 1. Обмеження області застосування в зв'язку з умовах. В таких умовах використання пристроюнеобхідністю використання нерухомої площадки прототипу неможливе. Необхідно застосування поблизу рухомої основи /необхідність проведення других пристроїв визначення, здатних виконувати операци виміру пеленгів за допомогою вимірювакутомірні виміри в місці установки візира При цьому слід відзначити великі статичні і динамічні чів, дистанційно винесених відносно рухомої оснопохибки пристрою-прототипу. Виникнення статичви/. них похибок обумовлено наявністю похибок куто2. Обмеження діапазона переміщення і розво2 у 30189 роту голови оператора через складності забезпеперпендикулярних осей даної основи, а кути верчення великого поля обзору вимірювачів при матикального фг і азимутального фу візування визналих розмірах пристрою. чаються в базовій системі координат із таких співЗ Значні статичні похибки з-за збільшення певідношень: редаточних відношень похибок в вихідні чути в залежності вщ збільшення кута відхилення голови /1/ оператора від нульової лінії візування. 4. Виникнення динамічних похибок при супроводженні цілі під час виміру пеленгів на пdt ФУ /2/ реперних елементів із однієї точки пеленгації. cos(p В пропонуємому винаході вирішувались задачі де: фх - кут кренового розвороту голови операрозширення області застосування пристрою витора в зв'язаній системі координат рухомої основи; значення орієнтації осі візира в різних областях науки і техніки з підвищенням точності визначення ю Фх = J х z/інтеграторів, перший і третій виходи блока інтеграФіг.2 - схема виникнення похибки динамічного торів з'єднані відповідно з другим І першим входарежиму в пристрої-прототипу. ми блока нелінійних перетворень, перший і другий Фіг 3 ... Фіг 5 - схеми перетворення вимірювавиходи блока множення з'єднані відповідно з перних параметрів кутового розвороту відносно трьох шим і другим входами першого суматора, а його осей рухомої основи в базову систему координат. третій і четвертий виходи - відповідно з першим і Фіг.6 .. Фіг.13 - схеми реалізації пропонуємого другим входами другого суматора, перший і друпристрою. гий виходи блока нелінійних перетворень з'єднані На кресленнях прийняті наступні позначення: відповідно з першим і другим входами блока мноOXyz - базова система координат, ження, другий вхід пристрою поділу з'єднаний з ФУ, фг - кути візування в базовій системі коортретім виходом блока нелінійних перетворень, динат, перший вхід - з виходом другого суматора, а його вихід - з першим входом блока інтеграторів, вихід XZ - системи відліку пеленгів на реперні першого суматора з'єднаний з другим входом блоелементи, вимірювані із точок Од і ка інтеграторів, перший та другий виходи блока Ов в пристрої-прототипу; інтеграторів з'єднані з системами об'єкту «і. Рі - кутові значення пеленгів на реперні елементи, вимірювані із точок Од і Ов в пристроїТаким чином в процесі роботи пристрою викопрототипу; нується вимір величини швидкості кутового розвоДа,, Др, - похибки виміру рутових значень пероту рухомої основи відносно трьох взаємноленгів на реперні елементи в пристроі-прототипу; 30189 Pi - реперні елементи пристрою-прототипу; Бо - базова відстань між формувачами віяльних пучків; ДЕ*, ДБ 2 - похибки установки формувачів віяльних пучків в базовій системі координат; Дії - часовий інтервал між моментами виміру пеленгів на реперні елементи Рі і Рг в пристроїпрототипу; ДЇ2 - часовий інтервал між моментами виміру пеленгів на реперні елементи Р 3 і Рг в пристроїпрототипу; а с - кутова швидкість супроводження цглі оператором; Рі , Рз - точки поточного положення реперних елементів Рі, Рз по закінченні часу AU, A& відповідно при супроводженні ЦІЛІ оператором; OXUY M ZM - система відліку при виміру параметрів розвороту рухомої основи, OXrYrZr - система розвороту рухомої основи; ОХг Yr Z. - поточні положення системи розвороту рухомої основи при ОХ Г Yr Zr візуванні цілі; Г Г 1 І П. І ? 1~1 І ш" , Юу , со" • вимірювані швидкості кутового розвороту рухомої основи відносно трьох взаємноперпендикулярних осей зв'язаної* системи координат; Фх - кут розворота голови оператора по крену в зв'язаній системі координат В пропонуємому пристрої визначають орієнтацію осі візира, встановленого на рухомій основі, в базовій системі координат в результаті виміру параметрів кутового розвороту рухомої' основи відносно трьох осей зв'язаної з нею системи Операції виміру параметрів кутового розвороту рухомої основи в зв'язаній системі координат і формування кутів вертикального tpz і азимутального фу візування в базовій системі координат наочно показано на схемах перетворення, представлених нафіг.З . фіг.5. Як видно Із схеми фіг.З вимір параметрів кутового розвороту рухомої основи виконується в зв'язаній системі координат OXMY M ZM ПО наступним величинам: со" • кутова швидкість відносно осі ш у - кутова швидкість відносно осі ОУ И ; со" - кутова швидкість відносно осі 02*. Для визначення кутів візування сру, ф2 в базовій системі координат OXYZ необхідно привести вимірювані кутові швидкості в зв'язаній системі коор/ до базової системи коорди динат / со* > ю у нат. Відповідно зі схемами, представленими на фіг.З .. фіг.5, таке перетворення можна виконати наступним чином со, = со 7 = О» + О с = шї cos ф у +ш!І sin фу ro + v = Ос Od = ffl v СОЭфх -(О? Sirm x /4/ /5/ де: фх - кут кренового розвороту голови опера 8 тора в зв'язаній системі координат. /6/ Кут вертикального візування фг визначається в результаті інтегрування порівняння 14/. 171 г. режимах роботи за рахунок одночасного візування в результаті розворота рухомої основи і безпосеВихідний сигнал пристрою поділу 9 поступає реднього виміру розворотів відносно трьох взаємна 1 й вхід блока інтеграторів 10, де на Інтеграторі но-перпендикулярних осей даної основи з наступЗО проведеться обчислювання горизонтального ним формуванням кутів вертикального і кута орієнтації ЛІНІЇ візування /осі візира/ по форазимутального візування в базовій системі коормулі: динат. -СОЭф -О.»!? в І П ф Проведення вимірів параметрів кутового роз(ft фу = JCOS(p вороту рухомої основи /захисного шолома операц тора/, виконуємих на самій рухомій основі, дає З виходу блока інтеграторів 10 вирахуване можливість роботи пропонуємому пристрою визначення кутів фг /вихід 1/ і фу /вихід 2/ поступають значення орієнтації осі візира як на нерухомих об'в бортові систем об'єкта. єктах, так і на рухомих транспортних засобах. Аналіз роботи запропонованого пристрою поПерелік використаної літератури казує, що побудова таких пристроїв не передбачає 1. И.М. Тетельбаум, Ю.Р. Шнейдер, "400 схем для використання нерухомих юстованих площадок, АВМ", Москва, "Энергия", 1978г. винесених відносно рухомої основи і розміщених 2. B.C. Гутников "Интегральная электроника в изпоблизу її як в пристрої-прототипу, дня забезпемерительных устройствах", 2 е издание, Ленинград, чення дистанційного розміщення вимірювачі в, "Энергоатомиздат", Ленинградское отделение, визначаючих пеленги на реперні елементи рухо1988г. мої основи. 3. П. Хоровц, У. Хилл "Исскуство схемотехники", Відсутність нерухомої юстованої площадки в Том 1, Москва, "Мир", 1986г. пропонуємому пристрої дає великі переваги в застосуванні його в різних областях техніки, так як 11 х х z 13 ФІ2.5. 30189 14 Фіг 6 30189 15 16 із і _П \_\l \n_ ухц Фіг.? А" ї Фіг.п ФгіЛ ь ( k г' І( і 2' ЯЗ ч / • 1\ t 3 .і ' г' • гі (( ДЕ 3' Ґ 2і V J' ' 2' А г' Фіг.//. Фіг.іг 10 і' к зо і' г 29 і' ?' з' V і І2' г' г А \ з' 27 17 30189 Підписано до друку 05.06.2003 р. 18 Тираж 39 прим. ТОВ "Міжнародний науковий комгтет" вул. Артема, 77, м. Київ, 04050, Україна (044)236 - 47 - 24
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for determining position of an axis of sight
Автори англійськоюBieliaieva Halyna Hryhorivna, Plyta Oleksandr Andriiovych, Cherniak Serhii Ivanovych
Назва патенту російськоюУстройство для определения положения визирной оси
Автори російськоюБеляева Галина Григорьевна, Плита Александр Андреевич, Черняк Сергей Иванович
МПК / Мітки
МПК: G02B 23/00
Мітки: візира, пристрій, осі, орієнтації, визначення
Код посилання
<a href="https://ua.patents.su/10-30189-pristrijj-viznachennya-oriehntaci-osi-vizira.html" target="_blank" rel="follow" title="База патентів України">Пристрій визначення орієнтації осі візира</a>
Пристрій визначення орієнтації осі візира
Номер патенту: 30190
Опубліковано: 15.11.2000
Автори: Плита Олександр Андрійович, Беляєва Галина Григорівна, Полєжаєв Віктор Вікторович, Черняк Сергій Іванович, Бузанов Віктор Іванович
МПК: G02B 23/00
Мітки: осі, візира, пристрій, визначення, орієнтації
Формула / Реферат:
Пристрій визначення орієнтації вісі візира, який містить в собі візир, встановлений на рухомій основі, наприклад, на захисному шоломі оператора, складений із освітлювача, марки (сітки), об'єктиву і похилої напівпрозорої пластини, який відрізняється тим, що в його склад введені блок виміру параметрів розвороту, блок задання початку відліку, блок корекції, блок інтеграторів, косинусний перетворювач і пристрій поділу, а в візир введений...
Пристрій визначення орієнтації осі візира
Номер патенту: 30199
Опубліковано: 15.11.2000
Автори: Черняк Сергій Іванович, Беляєва Галина Григорівна, Плита Олександр Андрійович, Полєжаєв Віктор Вікторович
МПК: G02B 23/00
Мітки: визначення, осі, візира, пристрій, орієнтації
Формула / Реферат:
Пристрій визначення орієнтації осі візира, що містить візир, встановлений на рухомій основі, наприклад, на захисному шоломі оператора, складений із освітлювача, марки (сітки), об'єктиву та нахиленої плоскопаралельної пластини, який відрізняється тим, що до нього введено блок вимірювання параметрів розвороту, блок завдання початку відліку, запам'ятовуючий пристрій, суматор та інтегратор, а до візиру додатково встановлено у фокальній поверхні...
Спосіб визначення орієнтації осі візира та нашоломна система цілевказівки для його реалізації
Номер патенту: 47969
Опубліковано: 15.07.2002
Автори: Черняк Сергій Іванович, Кадочніков Сергій Михайлович, Ліпунова Валентина Григорівна
МПК: F41G 3/22
Мітки: спосіб, реалізації, орієнтації, система, осі, цілевказівки, визначення, нашоломна, візира
Формула / Реферат:
1. Спосіб визначення орієнтації осі візира, суть якого полягає в скануванні простору, в якому знаходиться нашоломний вузол із випромінюючими діодами, плоскими віяловими оптичними променями, визначенні первинних пеленгів на кожний випромінюючий діод на момент проходження через випромінюючі діоди віялових оптичних променів, визначенні положення нашоломного вузла у просторі та визначенні орієнтації осі візира, який відрізняється тим, що...
Спосіб визначення координат та орієнтації осі свердловини

Номер патенту: 31185
Опубліковано: 15.12.2000
Автори: Анупрієнко Генадій Єфремович, Карпачов Юрій Андрійович, Рудик Юрій Микитович
МПК: E21B 47/02, G01C 9/00
Мітки: визначення, орієнтації, координат, осі, свердловини, спосіб
Текст:
...: i i i (2 ) (2 ) j ic = - cosb ( 2 ) sina ( 2) i i i i (2 ) cos b ( 2 ) cos a ( 2 ) j i i i + (2 ) sinb ( 2 ) k i . i (4) + + Із виразу (4) отримуєм вираз для вектора (поворот нанавколо осі O iO i+ 1 : ( 2) ( 2) æ O iOi + 1 = R jic = ç - cos b ( 2 ) sin a ( 2 ) ii + i i è вісью O iz( 2 ) жорстко зв'язаною з возиком 2. i При цьому створюється система координат O ix( 2) y( 2 ) z( 2) (див. фіг. 2), де вісь Oi y( 2 ) направлеik ic ic ic ...
Пристрій визначення середнього рівня шуму за його відліками
Номер патенту: 55021
Опубліковано: 17.03.2003
Автори: КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Денека Анатолій Анатолійович, Каспирович Олександр Генадійович
МПК: G01S 7/36, H04B 15/00
Мітки: шуму, пристрій, середнього, відліками, визначення, рівня
Формула / Реферат:
Пристрій визначення середнього рівня шуму за його відліками, що містить перший блок затримки, вхід і вихід якого з'єднані з відповідними входами схеми віднімання, вихід схеми віднімання з'єднаний з першим входом суматора, вихід якого з'єднаний із входом регістра, із входом другого блока затримки і з першим входом схеми відбору максимуму, причому вихід регістра з'єднаний із входом суматора, а вихід другого блока затримки з'єднаний з другим...
Попередній патент: Спосіб лікування хронічного катарального гінгівіту у підлітків
Наступний патент: Турунда для лікування альвеоліту
Випадковий патент: Спосіб обігрівання коксових печей