Оцінка відхилення частоти і кадрова синхронізація в очрк-системі
Номер патенту: 88893
Опубліковано: 10.12.2009
Автори: Крішнамуртхі Рагхурман, Віджаян Раджив, Гупта Алок Кумар

Формула / Реферат
1. Спосіб виконання оцінки відхилення частоти і кадрової синхронізації в приймачі в системі зв'язку з ортогональним частотним розділенням каналів (ОЧРК), причому спосіб включає в себе:
оцінку відхилення частоти в приймачі, базуючись на прийнятих символах і метриці, яка вказує виявлену потужність пілот-сигналу;
усунення оціненого відхилення частоти для одержання скоректованих по частоті пілот-символів; і
виконання кадрової синхронізації, базуючись на метриці і скоректованих по частоті пілот-символах.
2. Спосіб за п. 1, в якому метрика базується на взаємній кореляції між двома прийнятими символами для двох періодів символу.
3. Спосіб за п. 1, в якому метрика базується на узгодженій фільтрації прийнятих символів з оцінками коефіцієнта посилення каналу.
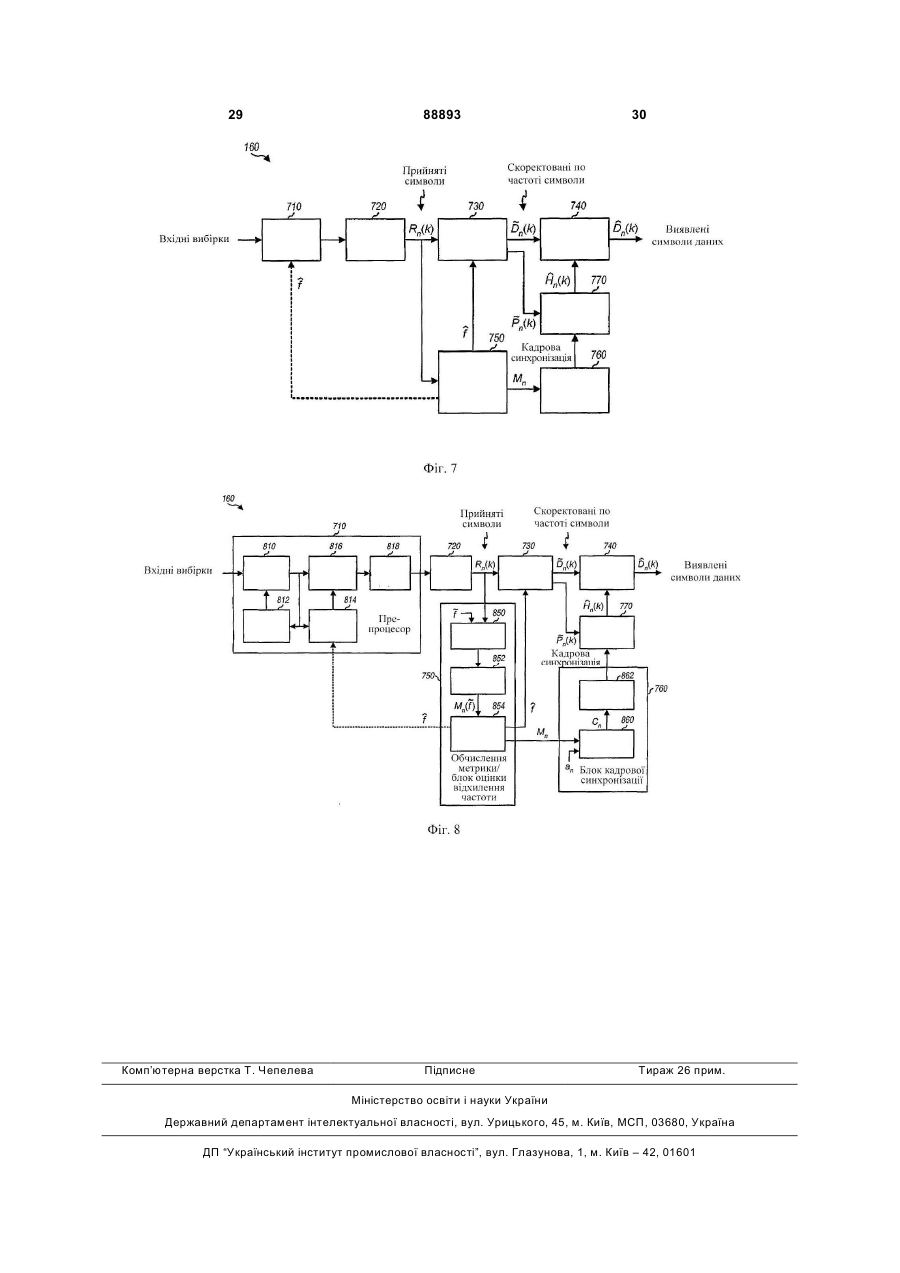
4. Спосіб за п. 1, в якому оцінка відхилення частоти включає в себе:
обчислення, для кожного з множини передбачуваних відхилень частоти, значення для метрики, базуючись на прийнятих символах, в якому кожне з передбачуваних відхилень частоти відповідає різному можливому відхиленню частоти в приймачі, і в якому одержують множину значень метрики для множини передбачуваних відхилень частоти,
ідентифікацію значення метрики з найбільшою величиною з числа множини значень метрики, і
надання передбачуваного відхилення частоти для ідентифікованого значення метрики як оціненого відхилення частоти.
5. Спосіб за п. 1, в якому виконання кадрової синхронізації включає в себе:
обчислення значення для метрики для поточного періоду символу, базуючись на скоректованих по частоті пілот-символах, одержаних в одному або декількох періодах символу, включаючи поточний період символу,
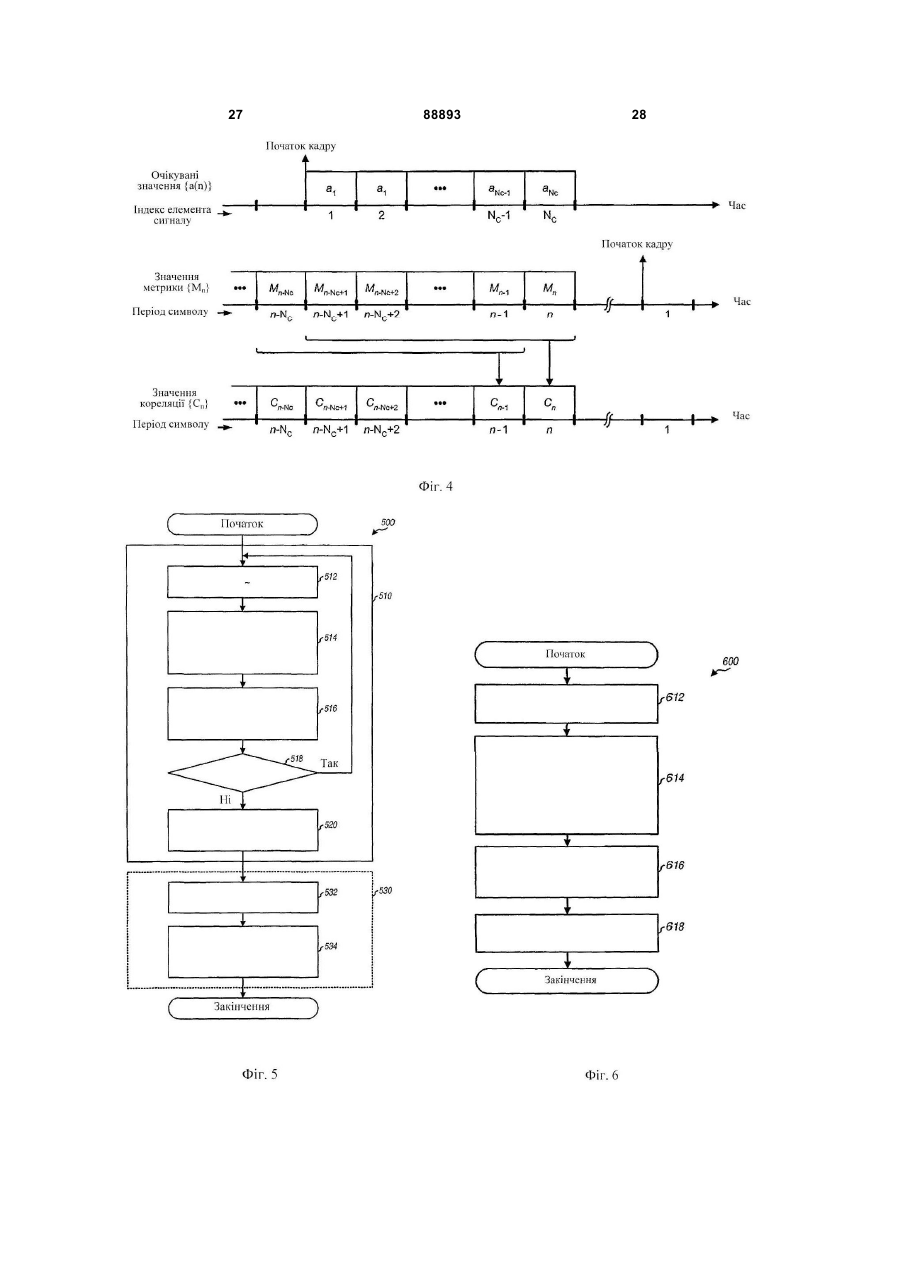
кореляцію множини значень метрики, одержаних для множини періодів символу, відмічених поточним періодом символу, з множиною очікуваних значень для одержання значення кореляції для поточного періоду символу, в якому множина очікуваних значень являє собою очікувані значення для множини значень метрики в позначеному періоді символу, і
виконання виявлення піка по значеннях кореляції, одержаних для різних періодів символу, для визначення кадрової синхронізації.
6. Спосіб за п. 1, який додатково включає в себе:
дескремблювання скоректованих по частоті пілот-символів з послідовністю псевдовипадкових чисел (ПВЧ) для одержання дескрембльованих пілот-символів, в якому послідовність ПВЧ вирівнюється на основі кадрової синхронізації; і
оцінку коефіцієнта посилення каналу, базуючись на дескрембльованих пілот-символах.
7. Спосіб за п. 6, який додатково включає в себе:
виконання виявлення даних по скоректованих по частоті символах даних за допомогою оцінок коефіцієнта посилення каналу для одержання виявлених символів даних.
8. Спосіб за п. 1, в якому оцінене відхилення частоти усувається за допомогою циклічного зсуву вибірок часової області перед виконанням швидкого перетворення Фур'є (ШПФ) для одержання прийнятих символів.
9. Спосіб за п. 1, в якому оцінене відхилення частоти усувається за допомогою зсуву індексів підсмуги на оцінене відхилення частоти.
10. Пристрій приймача в системі зв'язку з ортогональним частотним розділенням каналів (ОЧРК), який містить:
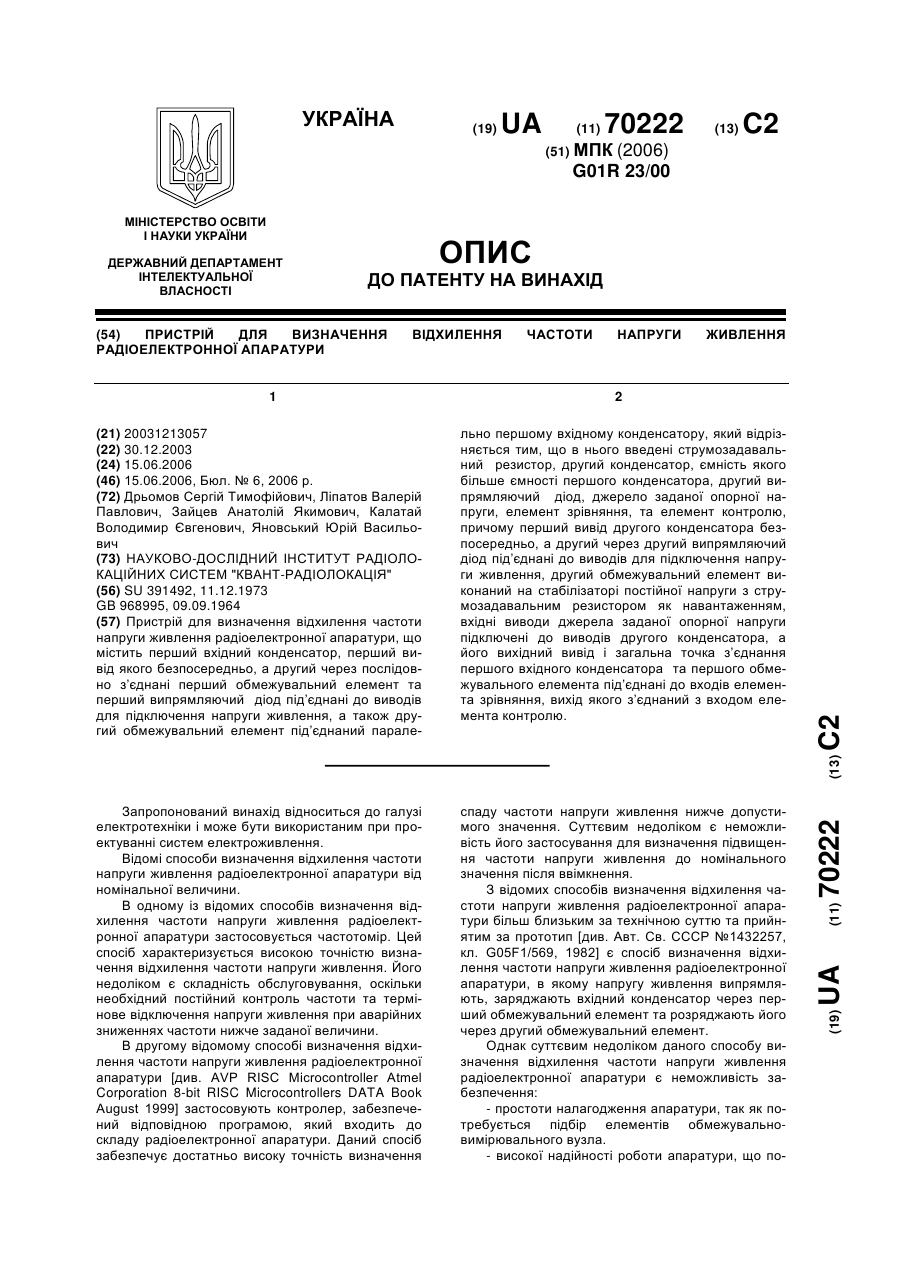
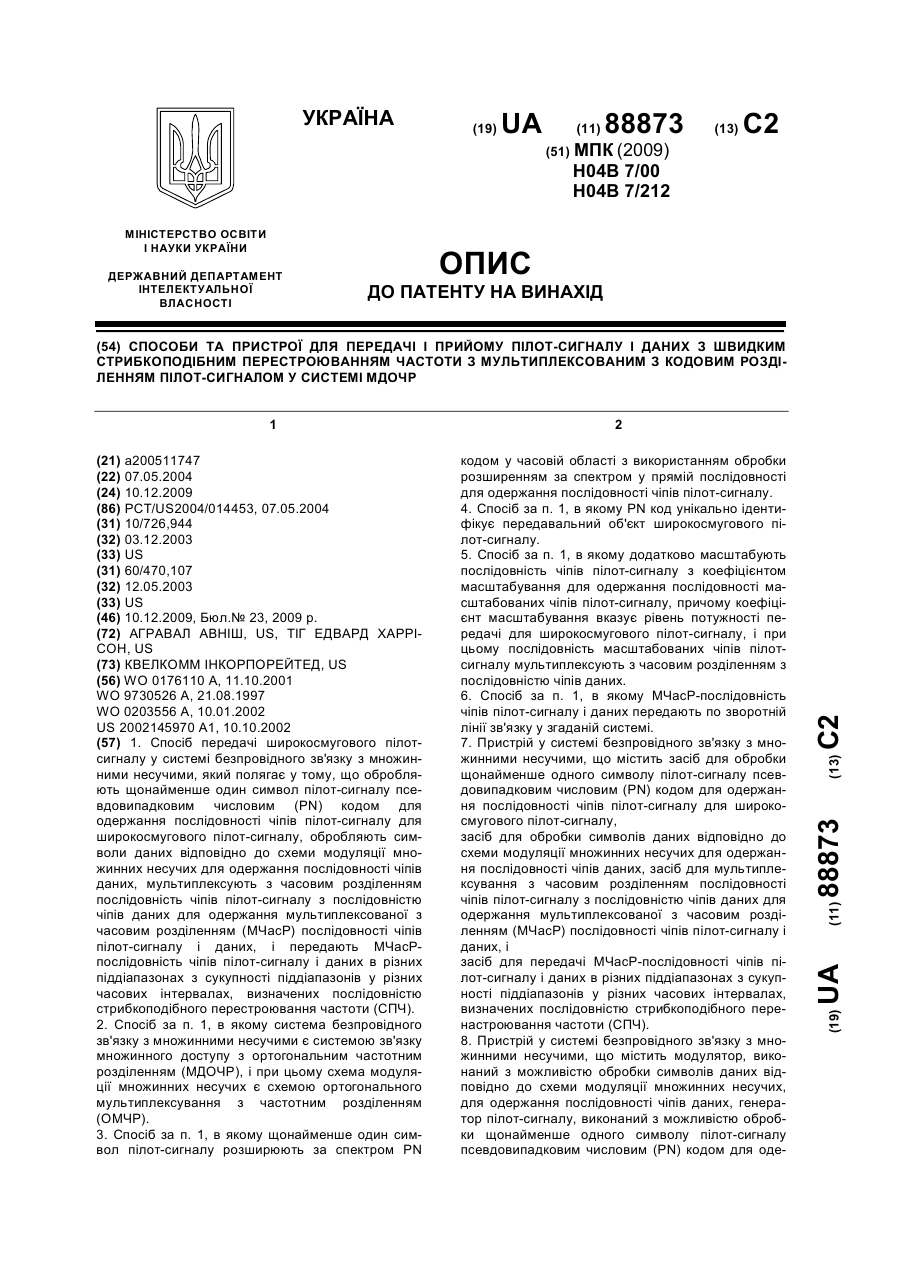
блок оцінки відхилення частоти, що служить для оцінки відхилення частоти в пристрої приймача, базуючись на метриці і прийнятих символах, в якому метрика вказує на виявлену потужність пілот-сигналу;
блок корекції частоти, що служить для усунення оціненого відхилення частоти для одержання скоректованих по частоті пілот-символів; і
блок кадрової синхронізації, що служить для виконання кадрової синхронізації, базуючись на метриці і скоректованих по частоті пілот-символах.
11. Пристрій приймача в системі зв'язку з ортогональним частотним розділенням каналів (ОЧРК), який містить:
засіб для оцінки відхилення частоти в пристрої приймача, базуючись на метриці і прийнятих символах, в якому метрика вказує на виявлену потужність пілот-сигналу;
засіб для усунення оціненого відхилення частоти для одержання скоректованих по частоті пілот-символів; і
засіб для виконання кадрової синхронізації, базуючись на метриці і скоректованих по частоті пілот-символах.
12. Спосіб виконання оцінки відхилення частоти в приймачі в системі зв'язку з ортогональним частотним розділенням каналів (ОЧРК), причому спосіб включає в себе:
обчислення, для кожного з множини передбачуваних відхилень частоти, значення для метрики, базуючись на прийнятих символах, в якому метрика вказує на виявлену потужність пілот-сигналу, в якому кожне з передбачуваних відхилень частоти відповідає різному можливому відхиленню частоти в приймачі, і в якому множину значень метрики одержують для множини передбачуваних відхилень частоти; і
оцінку відхилення частоти в приймачі, базуючись на множині значень метрики.
13. Спосіб за п. 12, в якому метрика визначається на основі взаємної кореляції між двома прийнятими символами для двох періодів символу.
14. Спосіб за п. 13, в якому значення метрики для кожного передбачуваного відхилення частоти обчислюється за допомогою:
обчислення, для кожної з множини підсмуг пілот-сигналу, що використовуються для передачі пілот-сигналу, взаємної кореляції між двома прийнятими символами, одержаними в двох періодах символу для передбачуваної підсмуги, яка зсунута на передбачуване відхилення частоти від підсмуги пілот-сигналу,
підсумовування результатів взаємної кореляції для множини підсмуг пілот-сигналу для одержання статистики рішень, і
одержання значення метрики для передбачуваного відхилення частоти, базуючись на статистиці рішень.
15. Спосіб за п. 13, в якому взаємна кореляція між двома прийнятими символами для передбачуваного відхилення частоти враховує різницю фаз між двома прийнятими символами через передбачуване відхилення частоти.
16. Спосіб за п. 12, в якому метрика визначається на основі узгоджено відфільтрованих символів.
17. Спосіб за п. 16, в якому значення метрики для кожного передбачуваного відхилення частоти обчислюється за допомогою:
множення, для кожної з множини підсмуг пілот-сигналу, що використовуються для передачі пілот-сигналу, оцінки коефіцієнта посилення каналу для передбачуваної підсмуги на прийнятий символ для передбачуваної підсмуги для одержання узгоджено відфільтрованого символу для підсмуги пілот-сигналу, причому передбачувана підсмуга зміщена від підсмуги пілот-сигналу на передбачуване відхилення частоти,
підсумовування узгоджено відфільтрованих символів для множини підсмуг пілот-сигналу для одержання статистики рішень, і
одержання значення метрики для передбачуваного відхилення частоти, базуючись на статистиці рішень.
18. Спосіб за п. 12, в якому оцінка відхилення частоти включає в себе:
ідентифікацію значення метрики з найбільшою величиною з числа множини значень метрики, і
надання передбачуваного відхилення частоти для ідентифікованого значення метрики як оціненого відхилення частоти для приймача.
19. Пристрій приймача в системі зв'язку з ортогональним частотним розділенням каналів (ОЧРК), який містить:
блок кореляції, що служить для обчислення, для кожного з множини передбачуваних відхилень частоти, значення для метрики, базуючись на прийнятих символах, в якому метрика вказує на виявлену потужність пілот-сигналу, в якому кожне з передбачуваних відхилень частоти відповідає різному можливому відхиленню частоти в приймачі, і в якому множину значень метрики одержують для множини передбачуваних відхилень частоти; і
виявник, що служить для оцінки відхилення частоти в пристрої приймача, базуючись на множині значень метрики.
20. Пристрій приймача за п. 19, в якому блок кореляції служить, для кожного передбачуваного відхилення частоти, для:
обчислення, для кожної з множини підсмуг пілот-сигналу, що використовуються для передачі пілот-сигналу, взаємної кореляції між двома прийнятими символами, одержаними в двох періодах символу для передбачуваної підсмуги, яка зміщена на передбачуване відхилення частоти від підсмуги пілот-сигналу,
підсумовування результатів взаємної кореляції для множини підсмуг пілот-сигналу для одержання статистики рішень, і
одержання значення метрики для передбачуваного відхилення частоти, базуючись на статистиці рішень.
21. Пристрій приймача в системі зв'язку з ортогональним частотним розділенням каналів (ОЧРК), який містить:
засіб для обчислення, для кожного з множини передбачуваних відхилень частоти, значення для метрики, базуючись на прийнятих символах, в якому метрика вказує на виявлену потужність пілот-сигналу, в якому кожне з передбачуваних відхилень частоти відповідає різному можливому відхиленню частоти в пристрої приймача, і в якому множину значень метрики одержують для множини передбачуваних відхилень частоти; і
засіб для оцінки відхилення частоти в пристрої приймача, базуючись на множині значень метрики.
22. Зчитуваний процесором носій для зберігання інструкцій, що служать для:
обчислення, для кожного з множини передбачуваних відхилень частоти, значення для метрики, базуючись на прийнятих символах, в якому метрика вказує на виявлену потужність пілот-сигналу, в якому кожне з передбачуваних відхилень частоти відповідає різному можливому відхиленню частоти в приймачі, і в якому множину значень метрики одержують для множини передбачуваних відхилень частоти; і
оцінки відхилення частоти в приймачі, базуючись на множині значень метрики.
23. Спосіб виконання кадрової синхронізації в приймачі в системі зв'язку з ортогональним частотним розділенням каналів (ОЧРК), причому спосіб включає в себе:
обчислення значення для метрики для поточного періоду символу, базуючись на прийнятих пілот-символах для одного або декількох періодів символу, що включають в себе поточний період символу, в якому метрика вказує на виявлену потужність пілот-сигналу;
кореляцію множини значень метрики, одержаних для множини періодів символу, відмічених поточним періодом символу, з множиною очікуваних значень для одержання значення кореляції для поточного періоду символу, в якому множина очікуваних значень являє собою очікувані значення для множини значень метрики в позначеному періоді символу; і
виконання виявлення піка по значеннях кореляції, одержаних для різних періодів символу, для визначення кадрової синхронізації.
24. Спосіб за п. 23, який додатково включає в себе:
виконання оцінки відхилення частоти для одержання оціненого відхилення частоти в приймачі, і в якому значення метрики для поточного періоду символу є основою для оціненого відхилення частоти.
25. Спосіб за п. 23, в якому виявлення піка виконується за допомогою
порівняння значення кореляції для поточного періоду символу з пороговим значенням, і
оголошення кадрової синхронізації, якщо значення кореляції більше, ніж порогове значення.
26. Спосіб за п. 23, в якому значення метрики для поточного періоду символу одержують на основі взаємної кореляції між прийнятими пілот-символами для поточного періоду символу і прийнятими пілот-символами для попереднього періоду символу.
27. Спосіб за п. 23, в якому для кожної з множини підсмуг пілот-сигналу, що використовуються для передачі пілот-сигналу, пілот-символи для підсмуги пілот-сигналу скремблюються з послідовністю псевдовипадкових чисел (ПВЧ) перед передачею.
28. Спосіб за п. 27, в якому кожне з множини очікуваних значень одержують за допомогою взаємної кореляції відповідної пари елементів сигналу (chip) в послідовності ПВЧ.
29. Пристрій приймача в системі зв'язку з ортогональним частотним розділенням каналів (ОЧРК), який містить:
блок обчислення метрики, що служить для обчислення значення для метрики для поточного періоду символу, базуючись на прийнятих пілот-символах для одного або декількох періодів символу, що включають в себе поточний період символу, в якому метрика вказує на виявлену потужність пілот-сигналу;
корелятор, що служить для кореляції множини значень метрики, одержаних для множини періодів символу, відмічених поточним періодом символу, з множиною очікуваних значень для одержання значення кореляції для поточного періоду символу, в якому множина очікуваних значень являє собою очікувані значення для множини значень метрики в позначеному періоді символу; і
виявник піка, що служить для виконання виявлення піка по значеннях кореляції, одержаних для різних періодів символу, для визначення кадрової синхронізації.
30. Пристрій приймача за п. 29, в якому для кожної з множини підсмуг пілот-сигналу, що використовуються для передачі пілот-сигналу, пілот-символи для підсмуги пілот-сигналу скремблюються з послідовністю псевдовипадкових чисел (ПВЧ) перед передачею.
31. Пристрій приймача за п. 30, в якому значення метрики для поточного періоду символу одержують на основі взаємної кореляції між прийнятими пілот-символами для поточного періоду символу і прийнятими пілот-символами для попереднього періоду символу, і в якому кожне з множини очікуваних значень одержують за допомогою взаємної кореляції відповідної пари елементів сигналу в послідовності ПВЧ.
32. Пристрій приймача в системі зв'язку з ортогональним частотним розділенням каналів (ОЧРК), який містить:
засіб для обчислення значення для метрики для поточного періоду символу, базуючись на прийнятих пілот-символах для одного або декількох періодів символу, що включають в себе поточний період символу, в якому метрика вказує на виявлену потужність пілот-сигналу;
засіб для кореляції множини значень метрики, одержаних для множини періодів символу, відмічених поточним періодом символу, з множиною очікуваних значень для одержання значення кореляції для поточного періоду символу, в якому множина очікуваних значень являє собою очікувані значення для множини значень метрики в позначеному періоді символу; і
засіб для виконання виявлення піка по значеннях кореляції, одержаних для різних періодів символу, для визначення кадрової синхронізації.
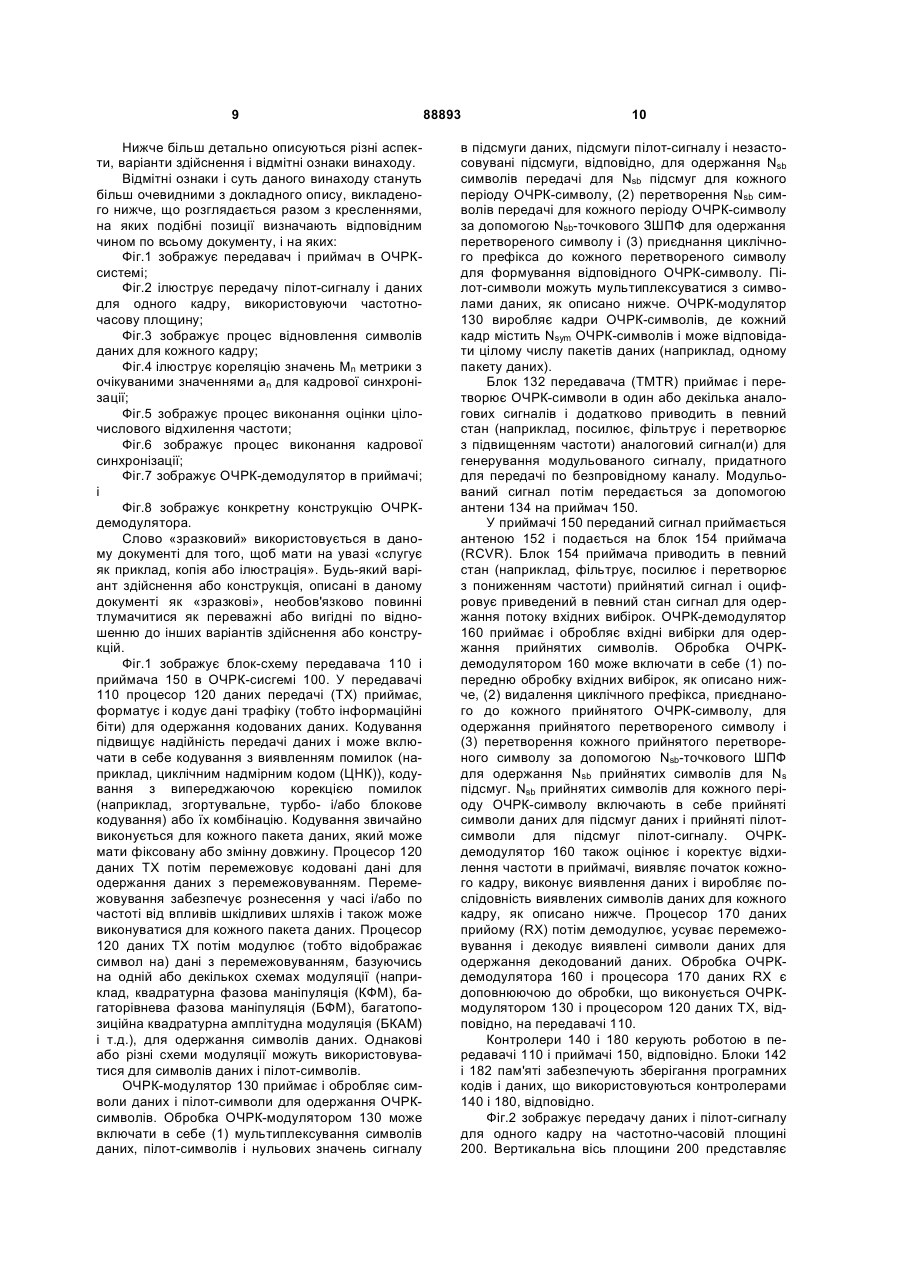
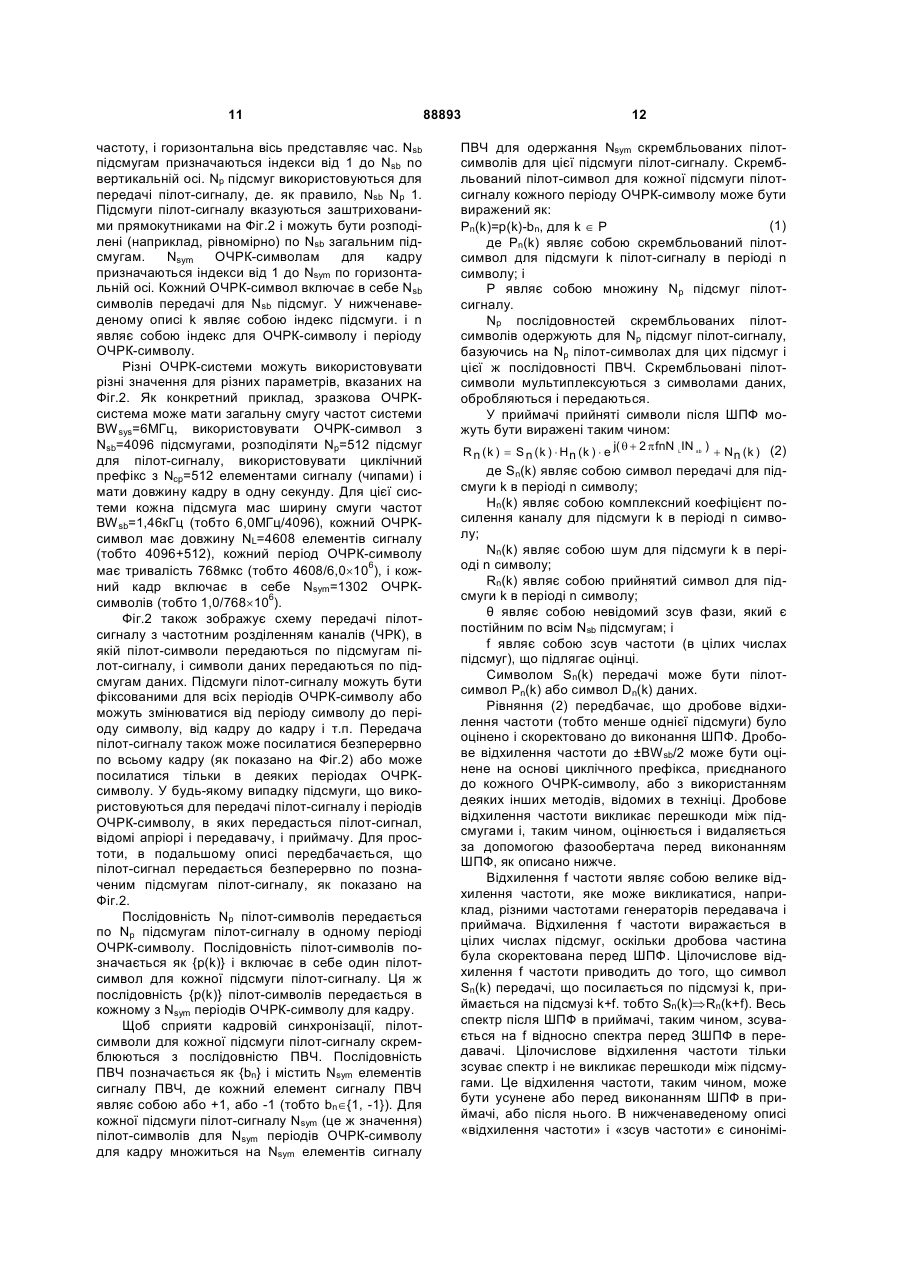
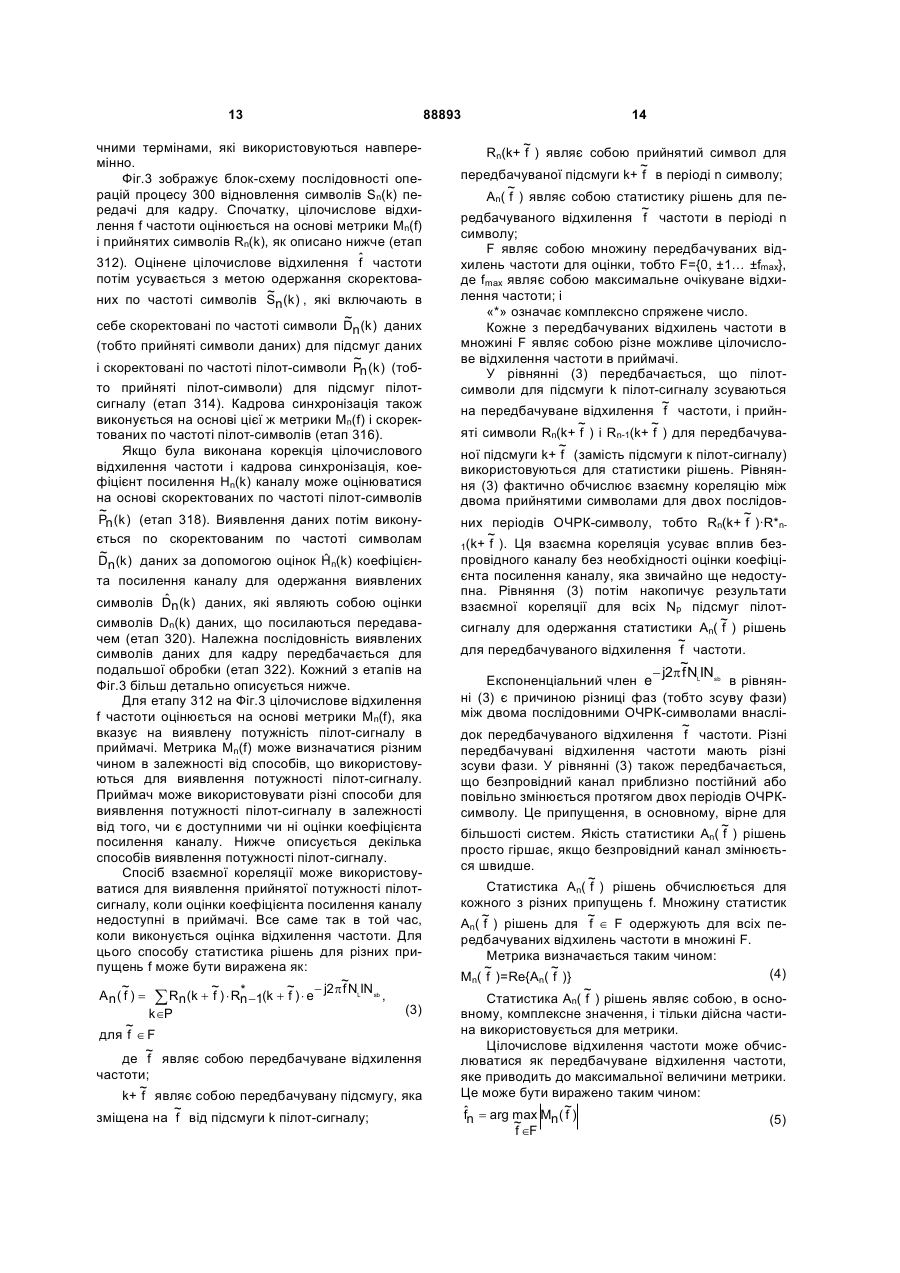
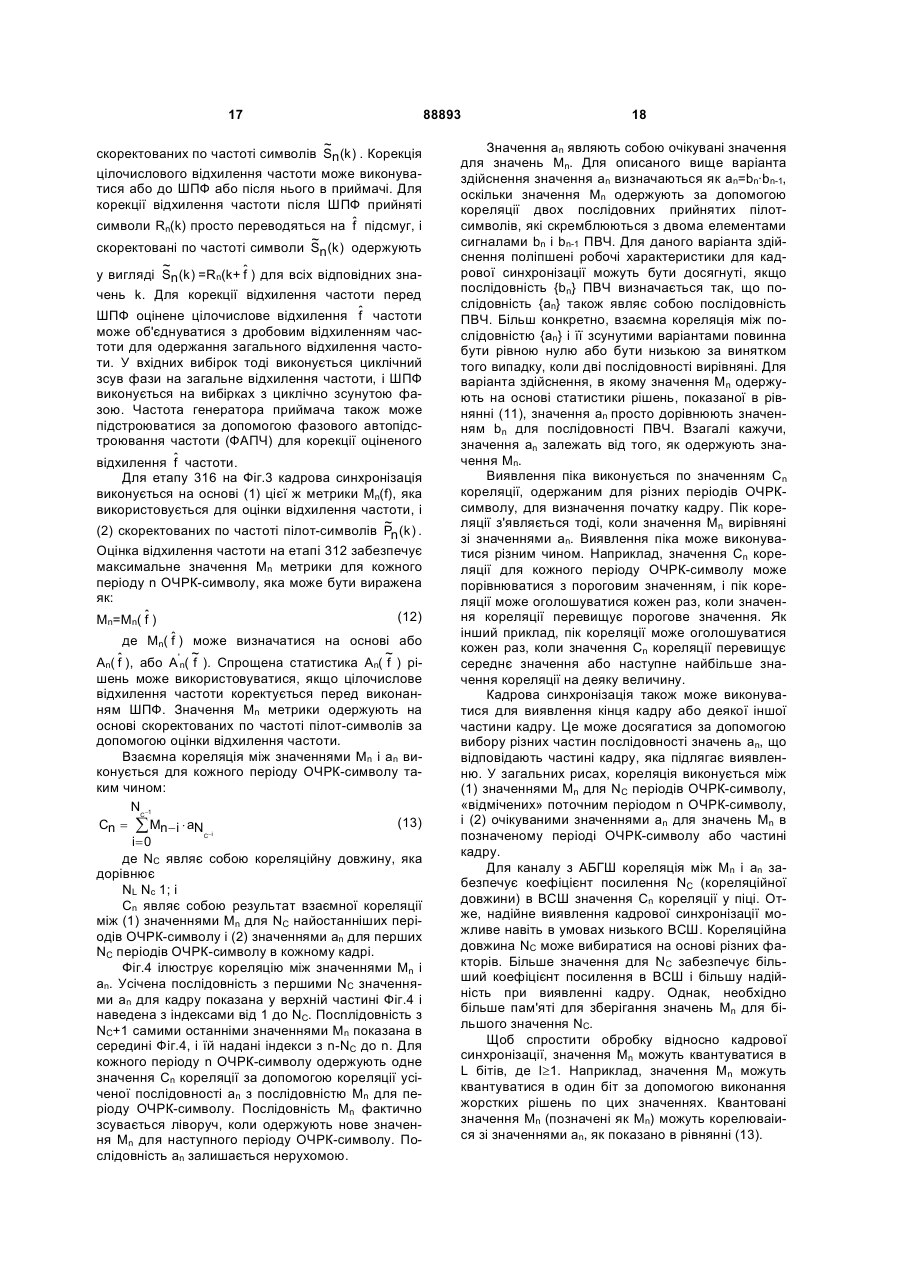
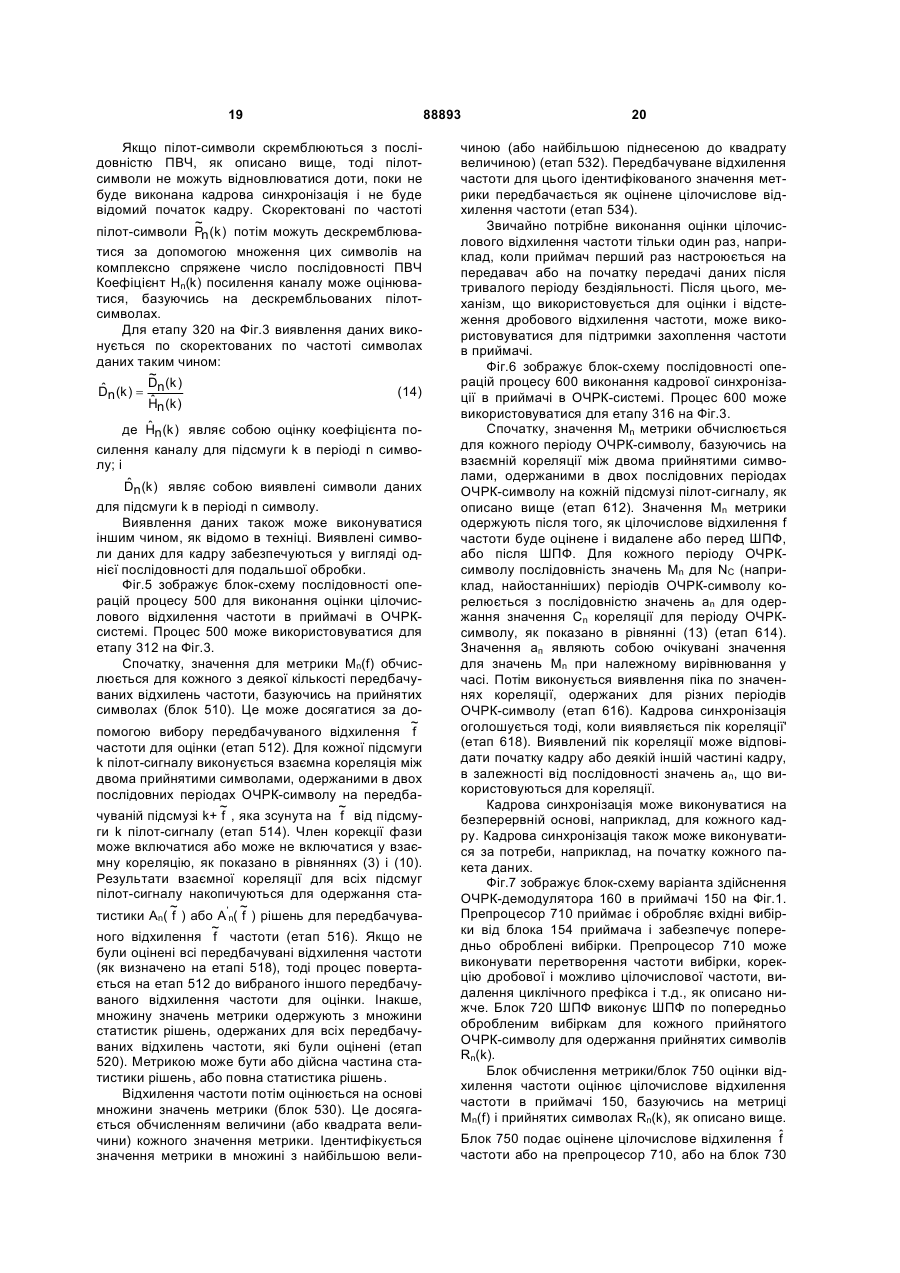
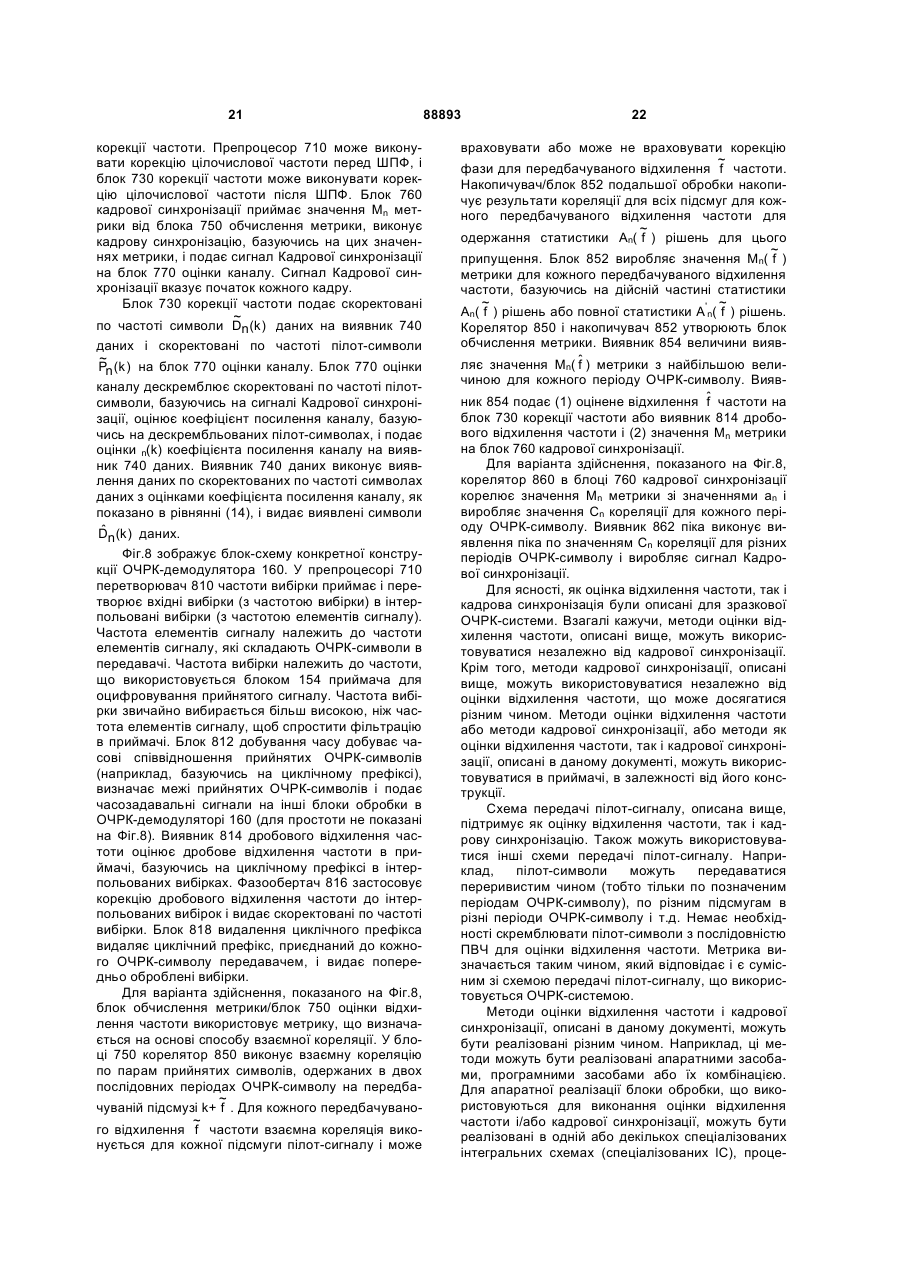
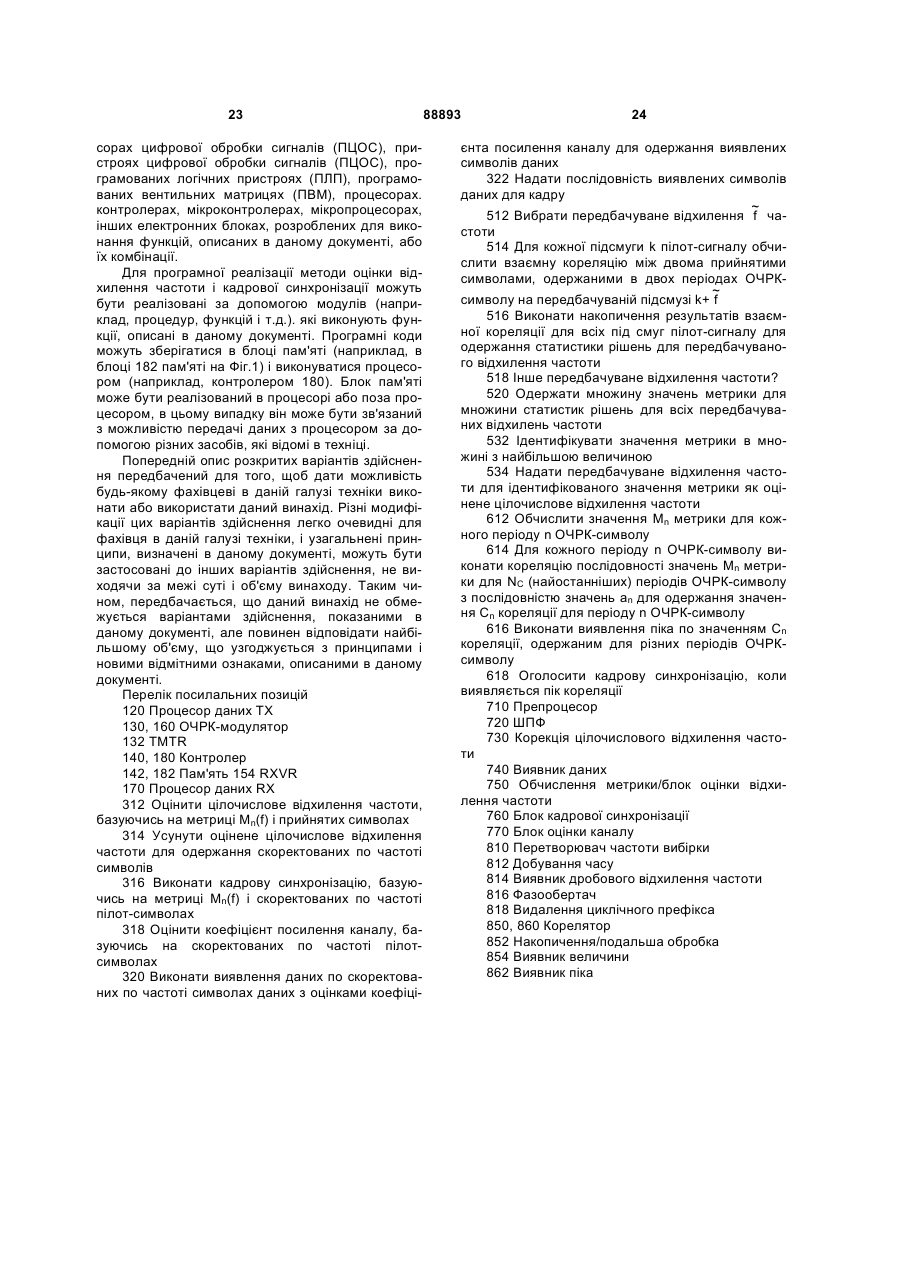
Текст
1. Спосіб виконання оцінки відхилення частоти і кадрової синхронізації в приймачі в системі зв'язку з ортогональним частотним розділенням каналів (ОЧРК), причому спосіб включає в себе: оцінку відхилення частоти в приймачі, базуючись на прийнятих символах і метриці, яка вказує виявлену потужність пілот-сигналу; усунення оціненого відхилення частоти для одержання скоректованих по частоті пілот-символів; і виконання кадрової синхронізації, базуючись на метриці і скоректованих по частоті пілот-символах. 2. Спосіб за п. 1, в якому метрика базується на взаємній кореляції між двома прийнятими символами для двох періодів символу. 3. Спосіб за п. 1, в якому метрика базується на узгодженій фільтрації прийнятих символів з оцінками коефіцієнта посилення каналу. 4. Спосіб за п. 1, в якому оцінка відхилення частоти включає в себе: обчислення, для кожного з множини передбачуваних відхилень частоти, значення для метрики, базуючись на прийнятих символах, в якому кожне з передбачуваних відхилень частоти відповідає різному можливому відхиленню частоти в приймачі, і в якому одержують множину значень метрики для множини передбачуваних відхилень частоти, ідентифікацію значення метрики з найбільшою величиною з числа множини значень метрики, і надання передбачуваного відхилення частоти для ідентифікованого значення метрики як оціненого відхилення частоти. 5. Спосіб за п. 1, в якому виконання кадрової синхронізації включає в себе: 2 (19) 1 3 блок кадрової синхронізації, що служить для виконання кадрової синхронізації, базуючись на метриці і скоректованих по частоті пілот-символах. 11. Пристрій приймача в системі зв'язку з ортогональним частотним розділенням каналів (ОЧРК), який містить: засіб для оцінки відхилення частоти в пристрої приймача, базуючись на метриці і прийнятих символах, в якому метрика вказує на виявлену потужність пілот-сигналу; засіб для усунення оціненого відхилення частоти для одержання скоректованих по частоті пілотсимволів; і засіб для виконання кадрової синхронізації, базуючись на метриці і скоректованих по частоті пілотсимволах. 12. Спосіб виконання оцінки відхилення частоти в приймачі в системі зв'язку з ортогональним частотним розділенням каналів (ОЧРК), причому спосіб включає в себе: обчислення, для кожного з множини передбачуваних відхилень частоти, значення для метрики, базуючись на прийнятих символах, в якому метрика вказує на виявлену потужність пілот-сигналу, в якому кожне з передбачуваних відхилень частоти відповідає різному можливому відхиленню частоти в приймачі, і в якому множину значень метрики одержують для множини передбачуваних відхилень частоти; і оцінку відхилення частоти в приймачі, базуючись на множині значень метрики. 13. Спосіб за п. 12, в якому метрика визначається на основі взаємної кореляції між двома прийнятими символами для двох періодів символу. 14. Спосіб за п. 13, в якому значення метрики для кожного передбачуваного відхилення частоти обчислюється за допомогою: обчислення, для кожної з множини підсмуг пілотсигналу, що використовуються для передачі пілотсигналу, взаємної кореляції між двома прийнятими символами, одержаними в двох періодах символу для передбачуваної підсмуги, яка зсунута на передбачуване відхилення частоти від підсмуги пілот-сигналу, підсумовування результатів взаємної кореляції для множини підсмуг пілот-сигналу для одержання статистики рішень, і одержання значення метрики для передбачуваного відхилення частоти, базуючись на статистиці рішень. 15. Спосіб за п. 13, в якому взаємна кореляція між двома прийнятими символами для передбачуваного відхилення частоти враховує різницю фаз між двома прийнятими символами через передбачуване відхилення частоти. 16. Спосіб за п. 12, в якому метрика визначається на основі узгоджено відфільтрованих символів. 17. Спосіб за п. 16, в якому значення метрики для кожного передбачуваного відхилення частоти обчислюється за допомогою: множення, для кожної з множини підсмуг пілотсигналу, що використовуються для передачі пілотсигналу, оцінки коефіцієнта посилення каналу для передбачуваної підсмуги на прийнятий символ для передбачуваної підсмуги для одержання узгодже 88893 4 но відфільтрованого символу для підсмуги пілотсигналу, причому передбачувана підсмуга зміщена від підсмуги пілот-сигналу на передбачуване відхилення частоти, підсумовування узгоджено відфільтрованих символів для множини підсмуг пілот-сигналу для одержання статистики рішень, і одержання значення метрики для передбачуваного відхилення частоти, базуючись на статистиці рішень. 18. Спосіб за п. 12, в якому оцінка відхилення частоти включає в себе: ідентифікацію значення метрики з найбільшою величиною з числа множини значень метрики, і надання передбачуваного відхилення частоти для ідентифікованого значення метрики як оціненого відхилення частоти для приймача. 19. Пристрій приймача в системі зв'язку з ортогональним частотним розділенням каналів (ОЧРК), який містить: блок кореляції, що служить для обчислення, для кожного з множини передбачуваних відхилень частоти, значення для метрики, базуючись на прийнятих символах, в якому метрика вказує на виявлену потужність пілот-сигналу, в якому кожне з передбачуваних відхилень частоти відповідає різному можливому відхиленню частоти в приймачі, і в якому множину значень метрики одержують для множини передбачуваних відхилень частоти; і виявник, що служить для оцінки відхилення частоти в пристрої приймача, базуючись на множині значень метрики. 20. Пристрій приймача за п. 19, в якому блок кореляції служить, для кожного передбачуваного відхилення частоти, для: обчислення, для кожної з множини підсмуг пілотсигналу, що використовуються для передачі пілотсигналу, взаємної кореляції між двома прийнятими символами, одержаними в двох періодах символу для передбачуваної підсмуги, яка зміщена на передбачуване відхилення частоти від підсмуги пілот-сигналу, підсумовування результатів взаємної кореляції для множини підсмуг пілот-сигналу для одержання статистики рішень, і одержання значення метрики для передбачуваного відхилення частоти, базуючись на статистиці рішень. 21. Пристрій приймача в системі зв'язку з ортогональним частотним розділенням каналів (ОЧРК), який містить: засіб для обчислення, для кожного з множини передбачуваних відхилень частоти, значення для метрики, базуючись на прийнятих символах, в якому метрика вказує на виявлену потужність пілот-сигналу, в якому кожне з передбачуваних відхилень частоти відповідає різному можливому відхиленню частоти в пристрої приймача, і в якому множину значень метрики одержують для множини передбачуваних відхилень частоти; і засіб для оцінки відхилення частоти в пристрої приймача, базуючись на множині значень метрики. 22. Зчитуваний процесором носій для зберігання інструкцій, що служать для: 5 обчислення, для кожного з множини передбачуваних відхилень частоти, значення для метрики, базуючись на прийнятих символах, в якому метрика вказує на виявлену потужність пілот-сигналу, в якому кожне з передбачуваних відхилень частоти відповідає різному можливому відхиленню частоти в приймачі, і в якому множину значень метрики одержують для множини передбачуваних відхилень частоти; і оцінки відхилення частоти в приймачі, базуючись на множині значень метрики. 23. Спосіб виконання кадрової синхронізації в приймачі в системі зв'язку з ортогональним частотним розділенням каналів (ОЧРК), причому спосіб включає в себе: обчислення значення для метрики для поточного періоду символу, базуючись на прийнятих пілотсимволах для одного або декількох періодів символу, що включають в себе поточний період символу, в якому метрика вказує на виявлену потужність пілот-сигналу; кореляцію множини значень метрики, одержаних для множини періодів символу, відмічених поточним періодом символу, з множиною очікуваних значень для одержання значення кореляції для поточного періоду символу, в якому множина очікуваних значень являє собою очікувані значення для множини значень метрики в позначеному періоді символу; і виконання виявлення піка по значеннях кореляції, одержаних для різних періодів символу, для визначення кадрової синхронізації. 24. Спосіб за п. 23, який додатково включає в себе: виконання оцінки відхилення частоти для одержання оціненого відхилення частоти в приймачі, і в якому значення метрики для поточного періоду символу є основою для оціненого відхилення частоти. 25. Спосіб за п. 23, в якому виявлення піка виконується за допомогою порівняння значення кореляції для поточного періоду символу з пороговим значенням, і оголошення кадрової синхронізації, якщо значення кореляції більше, ніж порогове значення. 26. Спосіб за п. 23, в якому значення метрики для поточного періоду символу одержують на основі взаємної кореляції між прийнятими пілотсимволами для поточного періоду символу і прийнятими пілот-символами для попереднього періоду символу. 27. Спосіб за п. 23, в якому для кожної з множини підсмуг пілот-сигналу, що використовуються для передачі пілот-сигналу, пілот-символи для підсмуги пілот-сигналу скремблюються з послідовністю псевдовипадкових чисел (ПВЧ) перед передачею. 28. Спосіб за п. 27, в якому кожне з множини очікуваних значень одержують за допомогою взаємної 88893 6 кореляції відповідної пари елементів сигналу (chip) в послідовності ПВЧ. 29. Пристрій приймача в системі зв'язку з ортогональним частотним розділенням каналів (ОЧРК), який містить: блок обчислення метрики, що служить для обчислення значення для метрики для поточного періоду символу, базуючись на прийнятих пілотсимволах для одного або декількох періодів символу, що включають в себе поточний період символу, в якому метрика вказує на виявлену потужність пілот-сигналу; корелятор, що служить для кореляції множини значень метрики, одержаних для множини періодів символу, відмічених поточним періодом символу, з множиною очікуваних значень для одержання значення кореляції для поточного періоду символу, в якому множина очікуваних значень являє собою очікувані значення для множини значень метрики в позначеному періоді символу; і виявник піка, що служить для виконання виявлення піка по значеннях кореляції, одержаних для різних періодів символу, для визначення кадрової синхронізації. 30. Пристрій приймача за п. 29, в якому для кожної з множини підсмуг пілот-сигналу, що використовуються для передачі пілот-сигналу, пілот-символи для підсмуги пілот-сигналу скремблюються з послідовністю псевдовипадкових чисел (ПВЧ) перед передачею. 31. Пристрій приймача за п. 30, в якому значення метрики для поточного періоду символу одержують на основі взаємної кореляції між прийнятими пілот-символами для поточного періоду символу і прийнятими пілот-символами для попереднього періоду символу, і в якому кожне з множини очікуваних значень одержують за допомогою взаємної кореляції відповідної пари елементів сигналу в послідовності ПВЧ. 32. Пристрій приймача в системі зв'язку з ортогональним частотним розділенням каналів (ОЧРК), який містить: засіб для обчислення значення для метрики для поточного періоду символу, базуючись на прийнятих пілот-символах для одного або декількох періодів символу, що включають в себе поточний період символу, в якому метрика вказує на виявлену потужність пілот-сигналу; засіб для кореляції множини значень метрики, одержаних для множини періодів символу, відмічених поточним періодом символу, з множиною очікуваних значень для одержання значення кореляції для поточного періоду символу, в якому множина очікуваних значень являє собою очікувані значення для множини значень метрики в позначеному періоді символу; і засіб для виконання виявлення піка по значеннях кореляції, одержаних для різних періодів символу, для визначення кадрової синхронізації. 7 Даний винахід належить, в основному, до передачі даних, і, зокрема, до методів виконання оцінки відхилення частоти і кадрової синхронізації в системі зв'язку з ортогональним частотним розділенням каналів (ОЧРК). ОЧРК являє собою метод модуляції з багатьма несучими, здатний забезпечувати високі робочі характеристики для деяких безпровідних середовищ. ОЧРК ефективно розділяє повну ширину смуги частот системи на множину (Nsb) ортогональних підсмуг, які також звичайно згадуються як тони, піднесучі, біни і частотні канали. При ОЧРК кожна підсмуга асоціюється з відповідною піднесучою. яка може модулюватися даними. У ОЧРК-системі передавач спочатку кодує, перемежовує і модулює потік інформаційних бітів для одержання потоку символів модуляції. У кожному періоді ОЧРК-символу Nsb символів «передачі» можуть посилатися по Nsb підсмугам, де кожний символ передачі може бути символом даних (тобто символом модуляції для даних), пілотсимволом (тобто символом модуляції для пілотсигналу) або нульовим значенням сигналу. Передавач перетворює Nsb символів передачі у часову область, використовуючи зворотне швидке перетворення Фур’є (ЗШГІФ), і одержує «перетворений» символ, який містить Nsb елементів сигналу (чинів) часової області. Для боротьби з частотноселективними завмираннями (тобто частотна характеристика, яка змінюється по Nsb підсмугам), які викликаються багатопроменевістю в безпровідному каналі, звичайно повторюється частина кожного перетвореного символу. Повторювана частина часто згадується як циклічний префікс і включає в себе Ncp елементів сигналу. ОЧРК-символ формується з перетвореного символу і його циклічного префікса. Кожний ОЧРК-символ містить NL елементів сигналу (де NL=Nsb+Ncp) і має тривалість NL періодів елементів сигналу, яка являє собою один період ОЧРК-символу (або просто «період символу»). Передавач може передаваги ОЧРК-символи в кадрах, причому кожний кадр містить множину (Nsym ) ОЧРК-символів. Кадри ОЧРК-символів додатково обробляються і передаються на приймач. Приймач виконує доповнюючу обробку і одержує NL вибірок для кожного прийнятого ОЧРКсимволу. Приймач видаляє циклічний префікс з кожного прийнятого ОЧРК-символу для одержання прийнятого перетвореного символу. Приймач потім перетворює кожний прийнятий перетворений символ в частотну область, використовуючи швидке перетворення Фур'є (ШПФ) і одержує Nsb «прийнятих» символів для Nsb підсмуг, які є оцінками Nsb символів передачі. Приймач звичайно виконує оцінку відхилення частоти для визначення відхилення частоти в приймачі. Відхилення частоти може бути внаслідок відмінності частот генераторів в передавачі і приймачі, доплерівського зсуву частоти і т.д. Приймач також звичайно виконує кадрову синхронізацію для виявлення початку кожного кадру, так що належна послідовність прийнятих символів може надаватися для демодуляції, усунення перемежовування і декодування. 88893 8 Для підтримки кадрової синхронізації передавач звичайно передає навчальну послідовність по кожному кадру. Ця навчальна послідовність містить пілот-символи і передається по позначеним підсмугам. Приймач обробляє навчальну послідовність з метою виявлення початку кожного кадру. Навчальна послідовність представляє службові дані, які знижують ефективність системи. Крім того, звичайно не є надійними робочі характеристики виявлення, які базуються на навчальній послідовності, особливо в умовах низького відношення сигнал-шум (ВСШ). Тому, в техніці існує потреба в методах виконання оцінки відхилення частоти і кадрової синхронізації в ОЧРК-системі. У даному документі описуються методи виконання оцінки відхилення частоти і кадрової синхронізації в ОЧРК-системі. Ці методи можуть забезпечувати хороші робочі характеристики навіть в умовах низького ВСШ і базуються на метриці, яка вказує на виявлену потужність пілот-сигналу в приймачі. Метрика може визначатися різним чином в залежності від способу, що використовується для виявлення потужності пілот-сигналу. Якщо недоступні оцінки коефіцієнта посилення каналу, що звичайно і буває, коли виконується оцінка відхилення частоти, тоді потужність пілот-сигналу може виявлятися за допомогою (1) взаємної кореляції двох прийнятих символів, одержаних в двох періодах ОЧРК-символу (звичайно двох прийнятих символів протягом двох послідовних періодів ОЧРК-символу), оскільки кожна підсмуга пілотсигналу використовується для передачі пілотсигналу, і (2) накопичення результатів кореляції для всіх підсмуг пілот-сигналу для одержання статистики рішень. Потім визначають метрику, базуючись на статистиці рішень. Для оцінки відхилення частоти значення метрики обчислюється для кожного з численних передбачуваних відхилень частоти, які являють собою різні можливі відхилення частоти в приймачі. Ідентифікується значення метрики з найбільшою величиною з числа значень метрики для численних передбачуваних відхилень частоти. Передбачуване відхилення частоти для цього ідентифікованого значення метрики передбачається як оцінене відхилення частоти в приймачі. Для кадрової синхронізації одержують значення кореляції для кожного періоду ОЧРК-символу за допомогою кореляції ідентифікованих значень метрики, одержаних для Nc (наприклад, найостанніших) періодів ОЧРК-символу, з NC очікуваними значеннями. Очікувані значення обчислюються способом, сумісним зі способом, яким обчислюються значення метрики. Наприклад, якщо пілотсимволи для кожної підсмуги пілот-сигналу скремблюються з послідовністю псевдовипадкових чисел (ПВЧ) передавачем, і значення метрики одержуються за допомогою взаємної кореляції пар прийнятих символів, тоді очікувані значення одержуються за допомогою взаємної кореляції пар елементів сигналу (chip) в послідовності ПВЧ. Виявлення піка виконується по значеннях кореляції, одержаних для різних періодів ОЧРК-символу, для визначення кадрової синхронізації. 9 Нижче більш детально описуються різні аспекти, варіанти здійснення і відмітні ознаки винаходу. Відмітні ознаки і суть даного винаходу стануть більш очевидними з докладного опису, викладеного нижче, що розглядається разом з кресленнями, на яких подібні позиції визначають відповідним чином по всьому документу, і на яких: Фіг.1 зображує передавач і приймач в ОЧРКсистемі; Фіг.2 ілюструє передачу пілот-сигналу і даних для одного кадру, використовуючи частотночасову площину; Фіг.3 зображує процес відновлення символів даних для кожного кадру; Фіг.4 ілюструє кореляцію значень Мn метрики з очікуваними значеннями аn для кадрової синхронізації; Фіг.5 зображує процес виконання оцінки цілочислового відхилення частоти; Фіг.6 зображує процес виконання кадрової синхронізації; Фіг.7 зображує ОЧРК-демодулятор в приймачі; і Фіг.8 зображує конкретну конструкцію ОЧРКдемодулятора. Слово «зразковий» використовується в даному документі для того, щоб мати на увазі «слугує як приклад, копія або ілюстрація». Будь-який варіант здійснення або конструкція, описані в даному документі як «зразкові», необов'язково повинні тлумачитися як переважні або вигідні по відношенню до інших варіантів здійснення або конструкцій. Фіг.1 зображує блок-схему передавача 110 і приймача 150 в ОЧРК-сисгемі 100. У передавачі 110 процесор 120 даних передачі (ТХ) приймає, форматує і кодує дані трафіку (тобто інформаційні біти) для одержання кодованих даних. Кодування підвищує надійність передачі даних і може включати в себе кодування з виявленням помилок (наприклад, циклічним надмірним кодом (ЦНК)), кодування з випереджаючою корекцією помилок (наприклад, згортувальне, турбо- і/або блокове кодування) або їх комбінацію. Кодування звичайно виконується для кожного пакета даних, який може мати фіксовану або змінну довжину. Процесор 120 даних ТХ потім перемежовує кодовані дані для одержання даних з перемежовуванням. Перемежовування забезпечує рознесення у часі і/або по частоті від впливів шкідливих шляхів і також може виконуватися для кожного пакета даних. Процесор 120 даних ТХ потім модулює (тобто відображає символ на) дані з перемежовуванням, базуючись на одній або декількох схемах модуляції (наприклад, квадратурна фазова маніпуляція (КФМ), багаторівнева фазова маніпуляція (БФМ), багатопозиційна квадратурна амплітудна модуляція (БКАМ) і т.д.), для одержання символів даних. Однакові або різні схеми модуляції можуть використовуватися для символів даних і пілот-символів. ОЧРК-модулятор 130 приймає і обробляє символи даних і пілот-символи для одержання ОЧРКсимволів. Обробка ОЧРК-модулятором 130 може включати в себе (1) мультиплексування символів даних, пілот-символів і нульових значень сигналу 88893 10 в підсмуги даних, підсмуги пілот-сигналу і незастосовувані підсмуги, відповідно, для одержання Nsb символів передачі для Nsb підсмуг для кожного періоду ОЧРК-символу, (2) перетворення Nsb символів передачі для кожного періоду ОЧРК-символу за допомогою Nsb-точкового ЗШПФ для одержання перетвореного символу і (3) приєднання циклічного префікса до кожного перетвореного символу для формування відповідного ОЧРК-символу. Пілот-символи можуть мультиплексуватися з символами даних, як описано нижче. ОЧРК-модулятор 130 виробляє кадри ОЧРК-символів, де кожний кадр містить Nsym ОЧРК-символів і може відповідати цілому числу пакетів даних (наприклад, одному пакету даних). Блок 132 передавача (TMTR) приймає і перетворює ОЧРК-символи в один або декілька аналогових сигналів і додатково приводить в певний стан (наприклад, посилює, фільтрує і перетворює з підвищенням частоти) аналоговий сигнал(и) для генерування модульованого сигналу, придатного для передачі по безпровідному каналу. Модульований сигнал потім передається за допомогою антени 134 на приймач 150. У приймачі 150 переданий сигнал приймається антеною 152 і подається на блок 154 приймача (RCVR). Блок 154 приймача приводить в певний стан (наприклад, фільтрує, посилює і перетворює з пониженням частоти) прийнятий сигнал і оцифровує приведений в певний стан сигнал для одержання потоку вхідних вибірок. ОЧРК-демодулятор 160 приймає і обробляє вхідні вибірки для одержання прийнятих символів. Обробка ОЧРКдемодулятором 160 може включати в себе (1) попередню обробку вхідних вибірок, як описано нижче, (2) видалення циклічного префікса, приєднаного до кожного прийнятого ОЧРК-символу, для одержання прийнятого перетвореного символу і (3) перетворення кожного прийнятого перетвореного символу за допомогою Nsb-точкового ШПФ для одержання Nsb прийнятих символів для Ns підсмуг. Nsb прийнятих символів для кожного періоду ОЧРК-символу включають в себе прийняті символи даних для підсмуг даних і прийняті пілотсимволи для підсмуг пілот-сигналу. ОЧРКдемодулятор 160 також оцінює і коректує відхилення частоти в приймачі, виявляє початок кожного кадру, виконує виявлення даних і виробляє послідовність виявлених символів даних для кожного кадру, як описано нижче. Процесор 170 даних прийому (RX) потім демодулює, усуває перемежовування і декодує виявлені символи даних для одержання декодований даних. Обробка ОЧРКдемодулятора 160 і процесора 170 даних RX є доповнюючою до обробки, що виконується ОЧРКмодулятором 130 і процесором 120 даних ТХ, відповідно, на передавачі 110. Контролери 140 і 180 керують роботою в передавачі 110 і приймачі 150, відповідно. Блоки 142 і 182 пам'яті забезпечують зберігання програмних кодів і даних, що використовуються контролерами 140 і 180, відповідно. Фіг.2 зображує передачу даних і пілот-сигналу для одного кадру на частотно-часовій площині 200. Вертикальна вісь площини 200 представляє 11 частоту, і горизонтальна вісь представляє час. Nsb підсмугам призначаються індекси від 1 до Nsb no вертикальній осі. Np підсмуг використовуються для передачі пілот-сигналу, де. як правило, Nsb Np 1. Підсмуги пілот-сигналу вказуються заштрихованими прямокутниками на Фіг.2 і можуть бути розподілені (наприклад, рівномірно) по Nsb загальним підсмугам. Nsym ОЧРК-символам для кадру призначаються індекси від 1 до Nsym по горизонтальній осі. Кожний ОЧРК-символ включає в себе Nsb символів передачі для Nsb підсмуг. У нижченаведеному описі k являє собою індекс підсмуги. і n являє собою індекс для ОЧРК-символу і періоду ОЧРК-символу. Різні ОЧРК-системи можуть використовувати різні значення для різних параметрів, вказаних на Фіг.2. Як конкретний приклад, зразкова ОЧРКсистема може мати загальну смугу частот системи BWsys=6МГц, використовувати ОЧРК-символ з Nsb=4096 підсмугами, розподіляти Np=512 підсмуг для пілот-сигналу, використовувати циклічний префікс з Nср=512 елементами сигналу (чипами) і мати довжину кадру в одну секунду. Для цієї системи кожна підсмуга мас ширину смуги частот BWsb=1,46кГц (тобто 6,0МГц/4096), кожний ОЧРКсимвол має довжину NL=4608 елементів сигналу (тобто 4096+512), кожний період ОЧРК-символу має тривалість 768мкс (тобто 4608/6,0´106), і кожний кадр включає в себе Nsym =1302 ОЧРКсимволів (тобто 1,0/768´106). Фіг.2 також зображує схему передачі пілотсигналу з частотним розділенням каналів (ЧРК), в якій пілот-символи передаються по підсмугам пілот-сигналу, і символи даних передаються по підсмугам даних. Підсмуги пілот-сигналу можуть бути фіксованими для всіх періодів ОЧРК-символу або можуть змінюватися від періоду символу до періоду символу, від кадру до кадру і т.п. Передача пілот-сигналу також може посилатися безперервно по всьому кадру (як показано на Фіг.2) або може посилатися тільки в деяких періодах ОЧРКсимволу. У будь-якому випадку підсмуги, що використовуються для передачі пілот-сигналу і періодів ОЧРК-символу, в яких передасться пілот-сигнал, відомі апріорі і передавачу, і приймачу. Для простоти, в подальшому описі передбачається, що пілот-сигнал передається безперервно по позначеним підсмугам пілот-сигналу, як показано на Фіг.2. Послідовність Np пілот-символів передається по Np підсмугам пілот-сигналу в одному періоді ОЧРК-символу. Послідовність пілот-символів позначається як {р(k)} і включає в себе один пілотсимвол для кожної підсмуги пілот-сигналу. Ця ж послідовність {р(k)} пілот-символів передається в кожному з Nsym періодів ОЧРК-символу для кадру. Щоб сприяти кадровій синхронізації, пілотсимволи для кожної підсмуги пілот-сигналу скремблюються з послідовністю ПВЧ. Послідовність ПВЧ позначається як {bn} і містить Nsym елементів сигналу ПВЧ, де кожний елемент сигналу ПВЧ являє собою або +1, або -1 (тобто bnÎ{1, -1}). Для кожної підсмуги пілот-сигналу Nsym (це ж значення) пілот-символів для Nsym періодів ОЧРК-символу для кадру множиться на Nsym елементів сигналу 88893 12 ПВЧ для одержання Nsym скрембльованих пілотсимволів для цієї підсмуги пілот-сигналу. Скрембльований пілот-символ для кожної підсмуги пілотсигналу кожного періоду ОЧРК-символу може бути виражений як: (1) Pn(k)=p(k)-bn, для k Î Ρ де Pn(k) являє собою скрембльований пілотсимвол для підсмуги k пілот-сигналу в періоді n символу; і Ρ являє собою множину Νp підсмуг пілотсигналу. Np послідовностей скрембльованих пілотсимволів одержують для Np підсмуг пілот-сигналу, базуючись на Np пілот-символах для цих підсмуг і цієї ж послідовності ПВЧ. Скрембльовані пілотсимволи мультиплексуються з символами даних, обробляються і передаються. У приймачі прийняті символи після ШПФ можуть бути виражені таким чином: j( q + 2 p fnN IN ) R n ( k ) = S n ( k ) × H n (k ) × e + N n ( k ) (2) L sb де Sn(k) являє собою символ передачі для підсмуги k в періоді n символу; Hn(k) являє собою комплексний коефіцієнт посилення каналу для підсмуги k в періоді n символу; Nn(k) являє собою шум для підсмуги k в періоді n символу; Rn(k) являє собою прийнятий символ для підсмуги k в періоді n символу; θ являє собою невідомий зсув фази, який є постійним по всім Nsb підсмугам; і f являє собою зсув частоти (в цілих числах підсмуг), що підлягає оцінці. Символом Sn(k) передачі може бути пілотсимвол Pn(k) або символ Dn(k) даних. Рівняння (2) передбачає, що дробове відхилення частоти (тобто менше однієї підсмуги) було оцінено і скоректовано до виконання ШПФ. Дробове відхилення частоти до ±BW sb/2 може бути оцінене на основі циклічного префікса, приєднаного до кожного ОЧРК-символу, або з використанням деяких інших методів, відомих в техніці. Дробове відхилення частоти викликає перешкоди між підсмугами і, таким чином, оцінюється і видаляється за допомогою фазообертача перед виконанням ШПФ, як описано нижче. Відхилення f частоти являє собою велике відхилення частоти, яке може викликатися, наприклад, різними частотами генераторів передавача і приймача. Відхилення f частоти виражається в цілих числах підсмуг, оскільки дробова частина була скоректована перед ШПФ. Цілочислове відхилення f частоти приводить до того, що символ Sn(k) передачі, що посилається по підсмузі k, приймається на підсмузі k+f. тобто Sn(k)ÞRn(k+f). Весь спектр після ШПФ в приймачі, таким чином, зсувається на f відносно спектра перед ЗШПФ в передавачі. Цілочислове відхилення частоти тільки зсуває спектр і не викликає перешкоди між підсмугами. Це відхилення частоти, таким чином, може бути усунене або перед виконанням ШПФ в приймачі, або після нього. В нижченаведеному описі «відхилення частоти» і «зсув частоти» є синонімі 13 чними термінами, які використовуються навперемінно. Фіг.3 зображує блок-схему послідовності операцій процесу 300 відновлення символів Sn(k) передачі для кадру. Спочатку, цілочислове відхилення f частоти оцінюється на основі метрики Mn(f) і прийнятих символів Rn(k), як описано нижче (етап 312). Оцінене цілочислове відхилення ˆ частоти f потім усувається з метою одержання скоректова~ них по частоті символів Sn(k ) , які включають в ~ себе скоректовані по частоті символи Dn(k ) даних (тобто прийняті символи даних) для підсмуг даних ~ і скоректовані по частоті пілот-символи Pn (k ) (тобто прийняті пілот-символи) для підсмуг пілотсигналу (етап 314). Кадрова синхронізація також виконується на основі цієї ж метрики Mn(f) і скоректованих по частоті пілот-символів (етап 316). Якщо була виконана корекція цілочислового відхилення частоти і кадрова синхронізація, коефіцієнт посилення Hn(k) каналу може оцінюватися на основі скоректованих по частоті пілот-символів ~ Pn (k ) (етап 318). Виявлення даних потім виконується по скоректованим по частоті символам ~ Dn(k ) даних за допомогою оцінок Ĥn(k) коефіцієнта посилення каналу для одержання виявлених ˆ символів Dn(k ) даних, які являють собою оцінки символів Dn(k) даних, що посилаються передавачем (етап 320). Належна послідовність виявлених символів даних для кадру передбачається для подальшої обробки (етап 322). Кожний з етапів на Фіг.3 більш детально описується нижче. Для етапу 312 на Фіг.3 цілочислове відхилення f частоти оцінюється на основі метрики Μn(f), яка вказує на виявлену потужність пілот-сигналу в приймачі. Метрика Mn(f) може визначатися різним чином в залежності від способів, що використовуються для виявлення потужності пілот-сигналу. Приймач може використовувати різні способи для виявлення потужності пілот-сигналу в залежності від того, чи є доступними чи ні оцінки коефіцієнта посилення каналу. Нижче описується декілька способів виявлення потужності пілот-сигналу. Спосіб взаємної кореляції може використовуватися для виявлення прийнятої потужності пілотсигналу, коли оцінки коефіцієнта посилення каналу недоступні в приймачі. Все саме так в той час, коли виконується оцінка відхилення частоти. Для цього способу статистика рішень для різних припущень f може бути виражена як: ~ ~ ~ ~ * An ( f ) = å Rn (k + f ) × Rn -1(k + f ) × e - j2 p f NLINsb , (3) kÎP ~ для f Î F ~ де f являє собою передбачуване відхилення частоти; ~ k+ f являє собою передбачувану підсмугу, яка ~ зміщена на f від підсмуги k пілот-сигналу; 88893 14 ~ Rn(k+ f ) являє собою прийнятий символ для ~ передбачуваної підсмуги k+ f в періоді n символу; ~ Аn( f ) являє собою статистику рішень для пе~ редбачуваного відхилення f частоти в періоді n символу; F являє собою множину передбачуваних відхилень частоти для оцінки, тобто F={0, ±1… ±fmax}, де fmax являє собою максимальне очікуване відхилення частоти; і «*» означає комплексно спряжене число. Кожне з передбачуваних відхилень частоти в множині F являє собою різне можливе цілочислове відхилення частоти в приймачі. У рівнянні (3) передбачається, що пілотсимволи для підсмуги k пілот-сигналу зсуваються ~ на передбачуване відхилення f частоти, і прийн~ ~ яті символи Rn(k+ f ) і Rn-1(k+ f ) для передбачува~ ної підсмуги k+ f (замість підсмуги к пілот-сигналу) використовуються для статистики рішень. Рівняння (3) фактично обчислює взаємну кореляцію між двома прийнятими символами для двох послідов~ них періодів ОЧРК-символу, тобто Rn(k+ f )·R*n~ 1(k+ f ). Ця взаємна кореляція усуває вплив безпровідного каналу без необхідності оцінки коефіцієнта посилення каналу, яка звичайно ще недоступна. Рівняння (3) потім накопичує результати взаємної кореляції для всіх Np підсмуг пілот~ сигналу для одержання статистики Аn( f ) рішень ~ для передбачуваного відхилення f частоти. ~ - j2p f N IN L sb в рівнянЕкспоненціальний член e ні (3) є причиною різниці фаз (тобто зсуву фази) між двома послідовними ОЧРК-символами внаслі~ док передбачуваного відхилення f частоти. Різні передбачувані відхилення частоти мають різні зсуви фази. У рівнянні (3) також передбачається, що безпровідний канал приблизно постійний або повільно змінюється протягом двох періодів ОЧРКсимволу. Це припущення, в основному, вірне для ~ більшості систем. Якість статистики Аn( f ) рішень просто гіршає, якщо безпровідний канал змінюється швидше. ~ Статистика Аn( f ) рішень обчислюється для кожного з різних припущень f. Множину статистик ~ ~ Аn( f ) рішень для f Î F одержують для всіх передбачуваних відхилень частоти в множині F. Метрика визначається таким чином: ~ ~ (4) Mn( f )=Re{An( f )} ~ Статистика Аn( f ) рішень являє собою, в основному, комплексне значення, і тільки дійсна частина використовується для метрики. Цілочислове відхилення частоти може обчислюватися як передбачуване відхилення частоти, яке приводить до максимальної величини метрики. Це може бути виражено таким чином: ~ ˆ fn = arg max Mn ( f ) (5) ~ f ÎF 15 88893 де ˆn являє собою оцінене цілочислове відхиf лення частоти, визначене на періоді n ОЧРКсимволу. Метрика може мати як позитивні, так і негативні значення, оскільки пілот-символи скремблюються з послідовністю {аn} ПВЧ. Взяття величини метрики усуває вплив скремблювання. Цілочислове відхилення частоти може оцінюватися або один раз. використовуючи одну пару ОЧРК-символів, або багато разів, використовуючи численні пари ОЧРК-символів. Відхилення частоти звичайно повільно змінюється, і однакове оцінене цілочислове відхилення частоти часто оджержують для кожної пари ОЧРК-символів. Численні оцінки цілочислового відхилення частоти можуть використовуватися для виявлення неточної оцінки і забезпечення більшої упевненості в оціненому цілочисловому відхиленні частоти. У будь-якому випадку на етапі 312 одержують одне оцінене цілочислове відхилення ˆ частоги. Крім того, оцінка f цілочислового відхилення частоти звичайно вимагає виконання тільки один раз, коли приймач перший раз настроюється на передавач, і існує велика різниця між частотами генераторів передавача і приймача. При правильному припущенні f метрика Mn(f) може бути виражена таким чином: 2 2 Mn ( f ) = an × å Hn (k + f ) × p(k + f ) + nn (k + f ) (6) kÎP де vn(k+f) являє собою шумовий член для Mn(f) і може бути виражений як: ü ì ï ï * * nn (k + f ) = Reí å Rn (k + f ) × Nn -1(k + f ) + Rn -1(k + f ) × Nn (k + f )ý ï ïkÎP þ î і аn=bn·bn-1, причому b0= nNsym і аn Î {1,-1} (7) (8) У рівняннях (6) і (8) аn являє собою кореляцію між двома елементами bn і bn-1 сигналу ПВЧ для двох послідовних періодів ОЧРК-символу, де послідовність ПВЧ циклічно повертається до початку. Для каналу з адитивним білим гауссовим шумом (АБГШ) коефіцієнт посилення Hn(k+f) каналу може бути виключений з рівняння (6). У цьому випадку ВСШ метрики Mn(f) при правильному припущенні f може бути виражений як: (N × P )2 P SNR fe = P S = NP × S (9) 2 2 sn NP × sn де PS являє собою потужність передачі для кожного пілот-символу, яка дорівнює PS=E{|pk|2}, де Е{х} являє собою очікуване значення х; s2 являє собою дисперсію шуму vn(k+f), яка n дорівнює 2 2 sn = sn × PS ; 2 sn являє собою дисперсію шуму Nn(k); (NP·PS)2 являє собою потужність сигналу метрики Mn(f); 16 ΝP· s2 являє собою потужність шуму метрики n Mn(f); і SNRfe являє собою ВСШ метрики Mn(f). 2 У рівнянні (9) відношення PS/ sn являє собою також ВСШ прийнятих символів даних. Якщо кількість підсмуг пілот-сигналу досить велика, тоді ВСШ метрики Mn(f) може бути високим навіть тоді, коли ВСШ прийнятих символів даних низьке. Для зразкової ОЧРК-системи, описаної вище, з Np=512 ВСШ метрики Mn(f) приблизно дорівнює 27дБ, коли ВСШ прийнятих символів даних дорівнює 0дБ 2 (тобто SNRfe 27дБ, коли PS/ sn =0дБ). Цілочислове відхилення частоти, таким чином, може надійно оцінюватися на основі метрики Mn(f) навіть в умовах низького ВСШ. У рівнянні (3) експоненціальний член використовується для корекції фази внаслідок передбачу~ ваного відхилення f частоти. Спрощена статисти~ ка An( f ) рішень може визначатися без цього члена корекції фази таким чином: ~ ~ ~ * А'n( f )= å Rn (k + f ) × Rn -1(k + f ) (10) kÎP Метрика тоді може визначатися як ~ ' ~ Мn( f )=А n( f ). Цілочислове відхилення частоти може оцінюватися так, як показано в рівнянні (5). ~ Взагалі, А'n( f ) являє собою комплексне значення, ~ і квадрат величини |А'n( f )|2 (замість величини) може бути легше обчислений і використаний для рівняння (5). Можна показати, що ВСШ метрики ~ Mn(f), визначеної на основі А'n( f ), приблизно на 3дБ гірше, ніж ВСШ метрики Mn(f), визначеної на ~ основі А'n( f ). Це погіршення на 3дБ в ВСШ може компенсуватися подвоєнням кількості підсмуг пілот-сигналу. Спосіб узгодженого фільтра може використовуватися для виявлення потужності прийнятого пілот-сигналу, коли в приймачі доступні оцінки коефіцієнта посилення каналу. Для цього способу статистика рішень може визначатися таким чином: ~ А"n( f )= ~ * ~ ~ * (11) å Rn (k + f ) × Pn (k ) × Hn (k + f ), для f Î F kÎP ~ де Ĥn(k+ f ) являє собою оцінку коефіцієнта ~ посилення для передбачуваної підсмуги k+ f . У ~ рівнянні (11) множення на Ĥ*n(k+ f ) усуває вплив безпровідного каналу, і множення на Р* (к) усуває модуляцію на пілот-символ. Метрика Mn(f) тоді може визначатися рівною дійсній частині статисти~ ~ ~ ки A"n( f ) рішень, тобто Mn( f )=Re{A"n( f )}, аналогічно тому, що показано в рівнянні (4). Інші способи також можуть використовуватися для виявлення потужності прийнятого пілог-сигналу. Метрика визначається на основі статистики рішень, яка передбачається цими способами. Для етапу 314 на Фіг.3 оцінене цілочислове відхилення ˆ частоти усувається для одержання f 17 ~ скоректованих по частоті символів Sn(k ) . Корекція цілочислового відхилення частоти може виконуватися або до ШПФ або після нього в приймачі. Для корекції відхилення частоти після ШПФ прийняті символи Rn(k) просто переводяться на ˆ підсмуг, і f ~ скоректовані по частоті символи Sn(k ) одержують ~ у вигляді Sn(k ) =Rn(k+ ˆ ) для всіх відповідних знаf чень k. Для корекції відхилення частоти перед ˆ ШПФ оцінене цілочислове відхилення f частоти може об'єднуватися з дробовим відхиленням частоти для одержання загального відхилення частоти. У вхідних вибірок тоді виконується циклічний зсув фази на загальне відхилення частоти, і ШПФ виконується на вибірках з циклічно зсунутою фазою. Частота генератора приймача також може підстроюватися за допомогою фазового автопідстроювання частоти (ФАПЧ) для корекції оціненого відхилення ˆ частоти. f Для етапу 316 на Фіг.3 кадрова синхронізація виконується на основі (1) цієї ж метрики Mn(f), яка використовується для оцінки відхилення частоти, і ~ (2) скоректованих по частоті пілот-символів Pn (k ) . Оцінка відхилення частоти на етапі 312 забезпечує максимальне значення Мn метрики для кожного періоду n ОЧРК-символу, яка може бути виражена як: (12) f Мn=Мn( ˆ ) ˆ де Мn( f ) може визначатися на основі або ˆ ), або A'n( ~ ). Спрощена статистика An( ~ ) ріАn( f f f шень може використовуватися, якщо цілочислове відхилення частоти коректується перед виконанням ШПФ. Значення Мn метрики одержують на основі скоректованих по частоті пілот-символів за допомогою оцінки відхилення частоти. Взаємна кореляція між значеннями Мn і аn виконується для кожного періоду ОЧРК-символу таким чином: NC-1 (13) Cn = å Mn- i × aN C-i i=0 де NC являє собою кореляційну довжину, яка дорівнює NL Nc 1; i Сn являє собою результат взаємної кореляції між (1) значеннями Мn для NC найостанніших періодів ОЧРК-символу і (2) значеннями аn для перших NC періодів ОЧРК-символу в кожному кадрі. Фіг.4 ілюструє кореляцію між значеннями Мn і аn. Усічена послідовність з першими NC значеннями аn для кадру показана у верхній частині Фіг.4 і наведена з індексами від 1 до NC. Посnлідовність з NC+1 самими останніми значеннями Мn показана в середині Фіг.4, і їй надані індекси з n-NC до n. Для кожного періоду n ОЧРК-символу одержують одне значення Сn кореляції за допомогою кореляції усіченої послідовності аn з послідовністю Мn для періоду ОЧРК-символу. Послідовність Мn фактично зсувається ліворуч, коли одержують нове значення Мn для наступного періоду ОЧРК-символу. Послідовність аn залишається нерухомою. 88893 18 Значення аn являють собою очікувані значення для значень Мn. Для описаного вище варіанта здійснення значення аn визначаються як an=bn·bn-1, оскільки значення Мn одержують за допомогою кореляції двох послідовних прийнятих пілотсимволів, які скремблюються з двома елементами сигналами bn і bn-1 ПВЧ. Для даного варіанта здійснення поліпшені робочі характеристики для кадрової синхронізації можуть бути досягнуті, якщо послідовність {bn} ПВЧ визначається так, що послідовність {аn} також являє собою послідовність ПВЧ. Більш конкретно, взаємна кореляція між послідовністю {аn} і її зсунутими варіантами повинна бути рівною нулю або бути низькою за винятком того випадку, коли дві послідовності вирівняні. Для варіанта здійснення, в якому значення Мn одержують на основі статистики рішень, показаної в рівнянні (11), значення аn просто дорівнюють значенням bn для послідовності ПВЧ. Взагалі кажучи, значення аn залежать від того, як одержують значення Мn. Виявлення піка виконується по значенням Сn кореляції, одержаним для різних періодів ОЧРКсимволу, для визначення початку кадру. Пік кореляції з'являється тоді, коли значення Мn вирівняні зі значеннями аn. Виявлення піка може виконуватися різним чином. Наприклад, значення Сn кореляції для кожного періоду ОЧРК-символу може порівнюватися з пороговим значенням, і пік кореляції може оголошуватися кожен раз, коли значення кореляції перевищує порогове значення. Як інший приклад, пік кореляції може оголошуватися кожен раз, коли значення Сn кореляції перевищує середнє значення або наступне найбільше значення кореляції на деяку величину. Кадрова синхронізація також може виконуватися для виявлення кінця кадру або деякої іншої частини кадру. Це може досягатися за допомогою вибору різних частин послідовності значень аn, що відповідають частині кадру, яка підлягає виявленню. У загальних рисах, кореляція виконується між (1) значеннями Мn для NC періодів ОЧРК-символу, «відмічених» поточним періодом n ОЧРК-символу, і (2) очікуваними значеннями аn для значень Мn в позначеному періоді ОЧРК-символу або частині кадру. Для каналу з АБГШ кореляція між Мn і аn забезпечує коефіцієнт посилення NC (кореляційної довжини) в ВСШ значення Сn кореляції у піці. Отже, надійне виявлення кадрової синхронізації можливе навіть в умовах низького ВСШ. Кореляційна довжина NC може вибиратися на основі різних факторів. Більше значення для NC забезпечує більший коефіцієнт посилення в ВСШ і більшу надійність при виявленні кадру. Однак, необхідно більше пам'яті для зберігання значень Мn для більшого значення NC. Щоб спростити обробку відносно кадрової синхронізації, значення Мn можуть квантуватися в L бітів, де І³1. Наприклад, значення Мn можуть квантуватися в один біт за допомогою виконання жорстких рішень по цих значеннях. Квантовані значення Мn (позначені як Мn) можуть корелюваіися зі значеннями аn, як показано в рівнянні (13). 19 Якщо пілот-символи скремблюються з послідовністю ПВЧ, як описано вище, тоді пілотсимволи не можуть відновлюватися доти, поки не буде виконана кадрова синхронізація і не буде відомий початок кадру. Скоректовані по частоті ~ пілот-символи Pn (k ) потім можуть дескремблюватися за допомогою множення цих символів на комплексно спряжене число послідовності ПВЧ Коефіцієнт Hn(k) посилення каналу може оцінюватися, базуючись на дескрембльованих пілотсимволах. Для етапу 320 на Фіг.3 виявлення даних виконується по скоректованих по частоті символах даних таким чином: ~ D (k ) ˆ Dn (k ) = n (14) ˆ Hn (k ) ˆ де Hn(k ) являє собою оцінку коефіцієнта посилення каналу для підсмуги k в періоді n символу; і ˆ Dn(k ) являє собою виявлені символи даних для підсмуги k в періоді n символу. Виявлення даних також може виконуватися іншим чином, як відомо в техніці. Виявлені символи даних для кадру забезпечуються у вигляді однієї послідовності для подальшої обробки. Фіг.5 зображує блок-схему послідовності операцій процесу 500 для виконання оцінки цілочислового відхилення частоти в приймачі в ОЧРКсистемі. Процес 500 може використовуватися для етапу 312 на Фіг.3. Спочатку, значення для метрики Mn(f) обчислюється для кожного з деякої кількості передбачуваних відхилень частоти, базуючись на прийнятих символах (блок 510). Це може досягатися за до~ помогою вибору передбачуваного відхилення f частоти для оцінки (етап 512). Для кожної підсмуги k пілот-сигналу виконується взаємна кореляція між двома прийнятими символами, одержаними в двох послідовних періодах ОЧРК-символу на передба~ ~ чуваній підсмузі k+ f , яка зсунута на f від підсмуги k пілот-сигналу (етап 514). Член корекції фази може включатися або може не включатися у взаємну кореляцію, як показано в рівняннях (3) і (10). Результати взаємної кореляції для всіх підсмуг пілот-сигналу накопичуються для одержання ста~ ~ тистики Аn( f ) або A'n( f ) рішень для передбачува~ ного відхилення f частоти (етап 516). Якщо не були оцінені всі передбачувані відхилення частоти (як визначено на етапі 518), тоді процес повертається на етап 512 до вибраного іншого передбачуваного відхилення частоти для оцінки. Інакше, множину значень метрики одержують з множини статистик рішень, одержаних для всіх передбачуваних відхилень частоти, які були оцінені (етап 520). Метрикою може бути або дійсна частина статистики рішень, або повна статистика рішень. Відхилення частоти потім оцінюється на основі множини значень метрики (блок 530). Це досягається обчисленням величини (або квадрата величини) кожного значення метрики. Ідентифікується значення метрики в множині з найбільшою вели 88893 20 чиною (або найбільшою піднесеною до квадрату величиною) (етап 532). Передбачуване відхилення частоти для цього ідентифікованого значення метрики передбачається як оцінене цілочислове відхилення частоти (етап 534). Звичайно потрібне виконання оцінки цілочислового відхилення частоти тільки один раз, наприклад, коли приймач перший раз настроюється на передавач або на початку передачі даних після тривалого періоду бездіяльності. Після цього, механізм, що використовується для оцінки і відстеження дробового відхилення частоти, може використовуватися для підтримки захоплення частоти в приймачі. Фіг.6 зображує блок-схему послідовності операцій процесу 600 виконання кадрової синхронізації в приймачі в ОЧРК-системі. Процес 600 може використовуватися для етапу 316 на Фіг.3. Спочатку, значення Мn метрики обчислюється для кожного періоду ОЧРК-символу, базуючись на взаємній кореляції між двома прийнятими символами, одержаними в двох послідовних періодах ОЧРК-символу на кожній підсмузі пілот-сигналу, як описано вище (етап 612). Значення Мn метрики одержують після того, як цілочислове відхилення f частоти буде оцінене і видалене або перед ШПФ, або після ШПФ. Для кожного періоду ОЧРКсимволу послідовність значень Мn для NC (наприклад, найостанніших) періодів ОЧРК-символу корелюється з послідовністю значень аn для одержання значення Сn кореляції для періоду ОЧРКсимволу, як показано в рівнянні (13) (етап 614). Значення ап являють собою очікувані значення для значень Мn при належному вирівнювання у часі. Потім виконується виявлення піка по значеннях кореляції, одержаних для різних періодів ОЧРК-символу (етап 616). Кадрова синхронізація оголошується тоді, коли виявляється пік кореляції' (етап 618). Виявлений пік кореляції може відповідати початку кадру або деякій іншій частині кадру, в залежності від послідовності значень аn, що використовуються для кореляції. Кадрова синхронізація може виконуватися на безперервній основі, наприклад, для кожного кадру. Кадрова синхронізація також може виконуватися за потреби, наприклад, на початку кожного пакета даних. Фіг.7 зображує блок-схему варіанта здійснення ОЧРК-демодулятора 160 в приймачі 150 на Фіг.1. Препроцесор 710 приймає і обробляє вхідні вибірки від блока 154 приймача і забезпечує попередньо оброблені вибірки. Препроцесор 710 може виконувати перетворення частоти вибірки, корекцію дробової і можливо цілочислової частоти, видалення циклічного префікса і т.д., як описано нижче. Блок 720 ШПФ виконує ШПФ по попередньо обробленим вибіркам для кожного прийнятого ОЧРК-символу для одержання прийнятих символів Rn(k). Блок обчислення метрики/блок 750 оцінки відхилення частоти оцінює цілочислове відхилення частоти в приймачі 150, базуючись на метриці Mn(f) і прийнятих символах Rn(k), як описано вище. Блок 750 подає оцінене цілочислове відхилення ˆ f частоти або на препроцесор 710, або на блок 730 21 корекції частоти. Препроцесор 710 може виконувати корекцію цілочислової частоти перед ШПФ, і блок 730 корекції частоти може виконувати корекцію цілочислової частоти після ШПФ. Блок 760 кадрової синхронізації приймає значення Мn метрики від блока 750 обчислення метрики, виконує кадрову синхронізацію, базуючись на цих значеннях метрики, і подає сигнал Кадрової синхронізації на блок 770 оцінки каналу. Сигнал Кадрової синхронізації вказує початок кожного кадру. Блок 730 корекції частоти подає скоректовані ~ по частоті символи Dn(k ) даних на виявник 740 даних і скоректовані по частоті пілот-символи ~ Pn (k ) на блок 770 оцінки каналу. Блок 770 оцінки каналу дескремблює скоректовані по частоті пілотсимволи, базуючись на сигналі Кадрової синхронізації, оцінює коефіцієнт посилення каналу, базуючись на дескрембльованих пілот-символах, і подає оцінки n(k) коефіцієнта посилення каналу на виявник 740 даних. Виявник 740 даних виконує виявлення даних по скоректованих по частоті символах даних з оцінками коефіцієнта посилення каналу, як показано в рівнянні (14), і видає виявлені символи ˆ Dn(k ) даних. Фіг.8 зображує блок-схему конкретної конструкції ОЧРК-демодулятора 160. У препроцесорі 710 перетворювач 810 частоти вибірки приймає і перетворює вхідні вибірки (з частотою вибірки) вінтерпольовані вибірки (з частотою елементів сигналу). Частота елементів сигналу належить до частоти елементів сигналу, які складають ОЧРК-символи в передавачі. Частота вибірки належить до частоти, що використовується блоком 154 приймача для оцифровування прийнятого сигналу. Частота вибірки звичайно вибирається більш високою, ніж частота елементів сигналу, щоб спростити фільтрацію в приймачі. Блок 812 добування часу добуває часові співвідношення прийнятих ОЧРК-символів (наприклад, базуючись на циклічному префіксі), визначає межі прийнятих ОЧРК-символів і подає часозадавальні сигнали на інші блоки обробки в ОЧРК-демодуляторі 160 (для простоти не показані на Фіг.8). Виявник 814 дробового відхилення частоти оцінює дробове відхилення частоти в приймачі, базуючись на циклічному префіксі в інтерпольованих вибірках. Фазообертач 816 застосовує корекцію дробового відхилення частоти до інтерпольованих вибірок і видає скоректовані по частоті вибірки. Блок 818 видалення циклічного префікса видаляє циклічний префікс, приєднаний до кожного ОЧРК-символу передавачем, і видає попередньо оброблені вибірки. Для варіанта здійснення, показаного на Фіг.8, блок обчислення метрики/блок 750 оцінки відхилення частоти використовує метрику, що визначається на основі способу взаємної кореляції. У блоці 750 корелятор 850 виконує взаємну кореляцію по парам прийнятих символів, одержаних в двох послідовних періодах ОЧРК-символу на передба~ чуваній підсмузі k+ f . Для кожного передбачувано~ го відхилення f частоти взаємна кореляція виконується для кожної підсмуги пілот-сигналу і може 88893 22 враховувати або може не враховувати корекцію ~ фази для передбачуваного відхилення f частоти. Накопичувач/блок 852 подальшої обробки накопичує результати кореляції для всіх підсмуг для кожного передбачуваного відхилення частоти для ~ одержання статистики Аn( f ) рішень для цього ~ припущення. Блок 852 виробляє значення Мn( f ) метрики для кожного передбачуваного відхилення частоти, базуючись на дійсній частині статистики ~ ~ Аn( f ) рішень або повної статистики A'n( f ) рішень. Корелятор 850 і накопичувач 852 утворюють блок обчислення метрики. Виявник 854 величини виявляє значення Мn( ˆ ) метрики з найбільшою велиf чиною для кожного періоду ОЧРК-символу. Виявник 854 подає (1) оцінене відхилення ˆ частоти на f блок 730 корекції частоти або виявник 814 дробового відхилення частоти і (2) значення Мn метрики на блок 760 кадрової синхронізації. Для варіанта здійснення, показаного на Фіг.8, корелятор 860 в блоці 760 кадрової синхронізації корелює значення Мn метрики зі значеннями аn і виробляє значення Сn кореляції для кожного періоду ОЧРК-символу. Виявник 862 піка виконує виявлення піка по значенням Сn кореляції для різних періодів ОЧРК-символу і виробляє сигнал Кадрової синхронізації. Для ясності, як оцінка відхилення частоти, так і кадрова синхронізація були описані для зразкової ОЧРК-системи. Взагалі кажучи, методи оцінки відхилення частоти, описані вище, можуть використовуватися незалежно від кадрової синхронізації. Крім того, методи кадрової синхронізації, описані вище, можуть використовуватися незалежно від оцінки відхилення частоти, що може досягатися різним чином. Методи оцінки відхилення частоти або методи кадрової синхронізації, або методи як оцінки відхилення частоти, так і кадрової синхронізації, описані в даному документі, можуть використовуватися в приймачі, в залежності від його конструкції. Схема передачі пілот-сигналу, описана вище, підтримує як оцінку відхилення частоти, так і кадрову синхронізацію. Також можуть використовуватися інші схеми передачі пілот-сигналу. Наприклад, пілот-символи можуть передаватися переривистим чином (тобто тільки по позначеним періодам ОЧРК-символу), по різним підсмугам в різні періоди ОЧРК-символу і т.д. Немає необхідності скремблювати пілот-символи з послідовністю ПВЧ для оцінки відхилення частоти. Метрика визначається таким чином, який відповідає і є сумісним зі схемою передачі пілот-сигналу, що використовується ОЧРК-системою. Методи оцінки відхилення частоти і кадрової синхронізації, описані в даному документі, можуть бути реалізовані різним чином. Наприклад, ці методи можуть бути реалізовані апаратними засобами, програмними засобами або їх комбінацією. Для апаратної реалізації блоки обробки, що використовуються для виконання оцінки відхилення частоти і/або кадрової синхронізації, можуть бути реалізовані в одній або декількох спеціалізованих інтегральних схемах (спеціалізованих lС), проце 23 сорах цифрової обробки сигналів (ПЦОС), пристроях цифрової обробки сигналів (ПЦОС), програмованих логічних пристроях (ПЛП), програмованих вентильних матрицях (ПВМ), процесорах. контролерах, мікроконтролерах, мікропроцесорах, інших електронних блоках, розроблених для виконання функцій, описаних в даному документі, або їх комбінації. Для програмної реалізації методи оцінки відхилення частоти і кадрової синхронізації можуть бути реалізовані за допомогою модулів (наприклад, процедур, функцій і т.д.). які виконують функції, описані в даному документі. Програмні коди можуть зберігатися в блоці пам'яті (наприклад, в блоці 182 пам'яті на Фіг.1) і виконуватися процесором (наприклад, контролером 180). Блок пам'яті може бути реалізований в процесорі або поза процесором, в цьому випадку він може бути зв'язаний з можливістю передачі даних з процесором за допомогою різних засобів, які відомі в техніці. Попередній опис розкритих варіантів здійснення передбачений для того, щоб дати можливість будь-якому фахівцеві в даній галузі техніки виконати або використати даний винахід. Різні модифікації цих варіантів здійснення легко очевидні для фахівця в даній галузі техніки, і узагальнені принципи, визначені в даному документі, можуть бути застосовані до інших варіантів здійснення, не виходячи за межі суті і об'єму винаходу. Таким чином, передбачається, що даний винахід не обмежується варіантами здійснення, показаними в даному документі, але повинен відповідати найбільшому об'єму, що узгоджується з принципами і новими відмітними ознаками, описаними в даному документі. Перелік посилальних позицій 120 Процесор даних ТХ 130, 160 ОЧРК-модулятор 132 TMTR 140, 180 Контролер 142, 182 Пам'ять 154 RXVR 170 Процесор даних RX 312 Оцінити цілочислове відхилення частоти, базуючись на метриці Mn(f) і прийнятих символах 314 Усунути оцінене цілочислове відхилення частоти для одержання скоректованих по частоті символів 316 Виконати кадрову синхронізацію, базуючись на метриці Mn(f) і скоректованих по частоті пілот-символах 318 Оцінити коефіцієнт посилення каналу, базуючись на скоректованих по частоті пілотсимволах 320 Виконати виявлення даних по скоректованих по частоті символах даних з оцінками коефіці 88893 24 єнта посилення каналу для одержання виявлених символів даних 322 Надати послідовність виявлених символів даних для кадру ~ 512 Вибрати передбачуване відхилення f частоти 514 Для кожної підсмуги k пілот-сигналу обчислити взаємну кореляцію між двома прийнятими символами, одержаними в двох періодах ОЧРК~ символу на передбачуваній підсмузі k+ f 516 Виконати накопичення результатів взаємної кореляції для всіх під смуг пілот-сигналу для одержання статистики рішень для передбачуваного відхилення частоти 518 Інше передбачуване відхилення частоти? 520 Одержати множину значень метрики для множини статистик рішень для всіх передбачуваних відхилень частоти 532 Ідентифікувати значення метрики в множині з найбільшою величиною 534 Надати передбачуване відхилення частоти для ідентифікованого значення метрики як оцінене цілочислове відхилення частоти 612 Обчислити значення Мn метрики для кожного періоду n ОЧРК-символу 614 Для кожного періоду n ОЧРК-символу виконати кореляцію послідовності значень Мn метрики для NC (найостанніших) періодів ОЧРК-символу з послідовністю значень аn для одержання значення Сn кореляції для періоду n ОЧРК-символу 616 Виконати виявлення піка по значенням Сn кореляції, одержаним для різних періодів ОЧРКсимволу 618 Оголосити кадрову синхронізацію, коли виявляється пік кореляції 710 Препроцесор 720 ШПФ 730 Корекція цілочислового відхилення частоти 740 Виявник даних 750 Обчислення метрики/блок оцінки відхилення частоти 760 Блок кадрової синхронізації 770 Блок оцінки каналу 810 Перетворювач частоти вибірки 812 Добування часу 814 Виявник дробового відхилення частоти 816 Фазообертач 818 Видалення циклічного префікса 850, 860 Корелятор 852 Накопичення/подальша обробка 854 Виявник величини 862 Виявник піка 25 88893 26 27 88893 28 29 Комп’ютерна верстка Т. Чепелева 88893 Підписне 30 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюFrequency error estimation and frame synchronization in ofdm-system
Автори англійськоюVidjaian Rajiv, Gupta Alok Kumar, Krishnamurthy Raghurman
Назва патенту російськоюОценка отклонения частоты и кадровая синхронизация в очрк-системе
Автори російськоюВиджаян Раджив, Гупта Алок Кумар, Кришнамуртхи Рагхурман
МПК / Мітки
МПК: H04L 27/26
Мітки: синхронізація, очрк-системі, відхілення, кадрова, оцінка, частоти
Код посилання
<a href="https://ua.patents.su/15-88893-ocinka-vidkhilennya-chastoti-i-kadrova-sinkhronizaciya-v-ochrk-sistemi.html" target="_blank" rel="follow" title="База патентів України">Оцінка відхилення частоти і кадрова синхронізація в очрк-системі</a>
Пристрій для визначення відхилення частоти напруги живлення радіоелектронної апаратури

Номер патенту: 70222
Опубліковано: 15.06.2006
Автори: Яновський Юрій Васильович, Ліпатов Валерій Павлович, Зайцев Анатолій Якимович, Калатай Володимир Євгенович, Дрьомов Сергій Тимофійович
МПК: G01R 23/00
Мітки: визначення, живлення, напруги, радіоелектронної, частоти, відхілення, апаратури, пристрій
Формула / Реферат:
1. Спосіб очищення бурових стічних вод, який включає подачу і осадження їх в роздільнику, забезпеченому пластинами, видалення фільтрату і твердої фази, який відрізняється тим, що перед подачею в роздільник бурові стічні води заздалегідь змішують з флокулянтом і коагулянтом, а після осадження з поверхні роздільника відбирають нафтопродукти.2.Спосіб за п. 1, який відрізняється тим, що фільтрат після осадження подають на фільтр тонкого...
Спосіб визначення відхилення частоти напруги живлення радіоелектронної апаратури
Номер патенту: 70222
Опубліковано: 15.09.2004
Автори: Зайцев Анатолій Якимович, Дрьомов Сергій Тимофійович, Калатай Володимир Євгенович, Ліпатов Валерій Павлович, Яновський Юрій Васильович
МПК: G01R 23/00
Мітки: відхілення, апаратури, спосіб, живлення, радіоелектронної, частоти, напруги, визначення
Формула / Реферат:
1. Спосіб очищення бурових стічних вод, який включає подачу і осадження їх в роздільнику, забезпеченому пластинами, видалення фільтрату і твердої фази, який відрізняється тим, що перед подачею в роздільник бурові стічні води заздалегідь змішують з флокулянтом і коагулянтом, а після осадження з поверхні роздільника відбирають нафтопродукти.2.Спосіб за п. 1, який відрізняється тим, що фільтрат після осадження подають на фільтр тонкого...
Способи та пристрої для передачі і прийому пілот-сигналу і даних з швидким стрибкоподібним перестроюванням частоти з мультиплексованим з кодовим розділенням пілот-сигналом у системі мдочр
Номер патенту: 88873
Опубліковано: 10.12.2009
Автори: Тіг Едвард Харрісон, Агравал Авніш
МПК: H04B 7/00, H04B 7/212
Мітки: швидким, передачі, розділенням, перестроюванням, пілот-сигналу, пристрої, кодовим, способи, стрибкоподібним, системі, пілот-сигналом, прийому, частоти, даних, мультиплексованим, мдочр
Формула / Реферат:
1. Спосіб передачі широкосмугового пілот-сигналу у системі безпровідного зв'язку з множинними несучими, який полягає у тому, що обробляють щонайменше один символ пілот-сигналу псевдовипадковим числовим (PN) кодом для одержання послідовності чіпів пілот-сигналу для широкосмугового пілот-сигналу, обробляють символи даних відповідно до схеми модуляції множинних несучих для одержання послідовності чіпів даних, мультиплексують з часовим...
Оцінка каналу та просторова обробка для tdd мімо систем
Номер патенту: 85830
Опубліковано: 10.03.2009
Автори: Кетчум Джон У., Говард Стівен Дж., Уолтон Дж. Родні, Уоллейс Марк
Мітки: оцінка, систем, мімо, каналу, обробка, просторова
Формула / Реферат:
1. Спосіб виконання просторової обробки в безпровідній системі дуплексного зв'язку з часовим розділенням (TDD) з багатьма входами і багатьма виходами (МІМО), який полягає в тому, що обробляють першу передачу, прийняту через першу лінію зв'язку для одержання щонайменше одного власного вектора, що використовується для просторової обробки і для передачі даних, прийнятої через першу лінію зв'язку, і для передачі даних, посланої через другу лінію...
Оцінка дисперсії шуму в безпровідному зв’язку для об’єднання рознесення і масштабування відповідно до логарифмічної правдоподібності
Номер патенту: 88328
Опубліковано: 12.10.2009
Автори: Джаяраман Срікант, Сюй Хао, Намгоонг Дзуне, Блек Пітер Дж.
МПК: H04L 27/26, H04B 1/10
Мітки: зв'язку, об'єднання, шуму, правдоподібності, логарифмічної, оцінка, безпровідному, масштабування, рознесення, відповідно, дисперсії
Формула / Реферат:
1. Спосіб оцінки дисперсії шуму, який включає етапи, на яких: приймають сигнал, що включає в себе символ мультиплексування з ортогональним частотним розділенням каналів (OFDM), який має внутрішньосмугові тони, що включають в себе внутрішньосмугові пілотні тони, і примежові тони, що включають в себе примежові пілотні тони і захисні тони;оцінюють ефективну дисперсію шуму для внутрішньосмугових тонів за допомогою внутрішньосмугових...
Попередній патент: Система і спосіб реалізації динамічного періоду пакетів- маячків у mac-протоколі з розподіленим резервуванням
Наступний патент: Стабільні фармацевтичні композиції у вигляді розчинів для інгаляторів з дозатором, що знаходяться під тиском
Випадковий патент: Спосіб модернізації сепараційного вузла газового