Мікроманіпулятор
Формула / Реферат
1. Мікроманіпулятор, що містить рухливий столик, з'єднаний із приводом, підключеним до блока керування, причому привід виконаний у вигляді вала з ротором, зв'язаним через штовхачі з кільцевими п'єзоелементами, один із яких установлений на валу, а другий установлений на корпусі, який відрізняється тим, що блок керування кожного п'єзоелемента виконаний у вигляді послідовно з'єднаних генератора високочастотних імпульсів збудження п'єзоелемента, керованого ключа і підсилювача, приєднаного до відповідного п'єзоелемента.
2. Мікроманіпулятор по п. 1, який відрізняється тим, що кожен блок керування відповідного п'єзоелемента додатково оснащений послідовно з'єднаними блоком формування частоти пачок імпульсів збудження п'єзоелемента і блоком формування тривалості пачки імпульсів збудження п'єзоелемента, підключеним до керуючого входу ключа.
3. Мікроманіпулятор по п. 2, який відрізняється тим, що частота пачок імпульсів збудження більше 2 кГц.
4. Мікроманіпулятор по п. 2, який відрізняється тим, що до керуючого входу кожного блока формування тривалості пачки імпульсів збудження п'єзоелемента підключений джойстик.
5. Мікроманіпулятор по п. 4, який відрізняється тим, що тривалість пачки імпульсів збудження на виході блока формування тривалості пропорційна відхиленню ручки джойстика.
6. Мікроманіпулятор по п. 4, який відрізняється тим, що тривалість пачки імпульсів збудження на виході блока формування тривалості пропорційна логарифму відхилення ручки джойстика.
7. Мікроманіпулятор за будь-яким із пп. 2-6, який відрізняється тим, що один з виходів генератора високочастотних імпульсів збудження п'єзоелемента підключений до входу блока формування частоти пачок імпульсів збудження п'єзоелемента.
8. Мікроманіпулятор по п. 1, який відрізняється тим, що блок керування п'єзоелемента оснащений блоком формування одиночної пачки імпульсів збудження п'єзоелемента, підключеним до керуючого входу ключа.
9. Мікроманіпулятор по п. 1, який відрізняється тим, що кільцеві п'єзоелементи виконані у вигляді кільцевих резонаторів з радіальною формою коливань, зовнішня циліндрична поверхня яких обхоплена хвильовою оболонкою, на якій установлені штовхачі, що упираються у внутрішню поверхню ротора.
10. Мікроманіпулятор по п. 9, який відрізняється тим, що кільцеві п'єзоелементи поляризовані по нормалі до їх плоских торцевих поверхонь, електроди нанесені на плоскі торцеві поверхні, а їхні параметри задовольняють співвідношення D/d~2, d/2~h, де D - зовнішній діаметр кільцевого п'єзоелемента, d - внутрішній діаметр кільцевого п'єзоелемента, h - висота кільцевого п'єзоелемента.
11. Мікроманіпулятор за будь-яким із пп. 1, 9, 10, який відрізняється тим, що частота генератора високочастотних імпульсів збудження п'єзоелементів відповідає нульовій моді радіальних коливань кільцевого резонатора.
12. Мікроманіпулятор по п. 9, який відрізняється тим, що хвильова оболонка виконана у вигляді тонкостінного циліндра з відверненими з двох сторін полями, що утворюють кільцеві ребра жорсткості, причому згадані ребра жорсткості розсічені щілинами, у яких одним кінцем закріплені штовхачі, виконані у вигляді тонких пластин.
13. Мікроманіпулятор по п. 12, який відрізняється тим, що штовхачі в хвильовій оболонці встановлені під кутом до радіального напрямку.
14. Мікроманіпулятор по п. 12, який відрізняється тим, що на штовхачі встановлені оболонки зі звукоізоляційного матеріалу, що сполучаються зі штовхачами по бічних торцевих поверхнях.
15. Мікроманіпулятор по п. 1, який відрізняється тим, що ротор виконаний у вигляді двох тонкостінних циліндрів, установлених на осьовій системі.
16. Мікроманіпулятор по п.15, який відрізняється тим, що осьова система виконана у вигляді циліндричного підшипника ковзання зі звукоізоляційного матеріалу з центральним фланцем, на якому закріплені тонкостінні циліндри.
17. Мікроманіпулятор по п. 1, який відрізняється тим, що кріплення другого п'єзоелемента, установленого на корпусі, виконано у вигляді гумового кільця, встановленого в нарізний фіксуючий паз у корпусі приводу, фторопластового кільця, встановленого в нарізний фіксуючий паз у притискному фланці, і стійок кріплення притискного фланця до корпуса приводу.
18. Мікроманіпулятор по п. 1, який відрізняється тим, що, кріплення першого п'єзоелемента, установленого на валу приводу, виконано у вигляді гумового кільця, встановленого в нарізний фіксуючий паз на осьовому фланці, жорстко з'єднаному з валом, фторопластового кільця, встановленого в нарізний фіксуючий паз у притискному фланці, і стійок кріплення притискного фланця до жорстко з'єднаного з валом осьового фланця.
19. Мікроманіпулятор по п. 1, який відрізняється тим, що корпус приводу виконаний у вигляді квадратного фланця з циліндричними проточками і додатково оснащений кожухом, причому кожух виконаний у вигляді товстостінного циліндра, що закінчується аналогічним квадратним фланцем, що жорстко з'єднані між собою.
20. Мікроманіпулятор по п. 19, який відрізняється тим, що вал встановлюється в підшипники кочення, один із яких встановлений у корпусі, а інший - в кожусі, причому робоча частина вала виходить з боку корпуса.
21. Мікроманіпулятор по п. 1, який відрізняється тим, що рухливий столик виконаний у складених лінійних направляючих і з'єднаний із приводом через гвинт-гайку, причому мікрометрична гайка жорстко закріплена на рухливому столику.
22. Мікроманіпулятор по п. 21, який відрізняється тим, що рухливий столик виконаний у вигляді робочої поверхні з посадковими місцями, зі зворотної сторони якого виконані посадковий отвір для мікрометричної гайки і суцільний подовжній кронштейн із посадковою площиною, перпендикулярною робочій поверхні столика і паралельній осі посадкового отвору для мікрометричної гайки, а з іншого боку встановлений аналогічний кронштейн із можливістю його попередньої орієнтації в площині, паралельній площині столика, при цьому на обидві посадкові площини кожного кронштейна встановлені напрямні з можливістю їх попередньої орієнтації на посадкових площинах, перпендикулярних площині столика.
23. Мікроманіпулятор по п. 22, який відрізняється тим, що напрямні рухливого столика сполучені через кульки чи ролики з бічними напрямними, що закріплені на площинах прямокутних косинців з можливістю їх попередньої орієнтації в цих площинах, а косинці закріплені ортогональними площинами на рамі з можливістю їх попередньої орієнтації в площині рами.
24. Мікроманіпулятор по п. 23, який відрізняється тим, що рама виконана у вигляді суцільного прямокутного кронштейна з фланцем для кріплення приводу і бічними ребрами жорсткості.
25. Мікроманіпулятор по п. 24, який відрізняється тим, що сполучення бічних косинців, приводу й інших елементів з рамою здійснюється через спеціальні уступи - п'яти, виконані на посадкових площинах рами, з можливістю утворення міжплощинних повітряних зазорів.
26. Мікроманіпулятор за будь-яким із пп. 21 - 25, який відрізняється тим, що гвинт сполучений з мікрометричний гайкою й одним кінцем через кульку упирається в нерухомий кронштейн, закріплений на рамі, а іншим кінцем з'єднаний з валом приводу, причому між мікрометричною різьбою і елементом кріплення гвинта до вала виконаний пружний зв'язок у вигляді ряду прорізів з утворенням тонких пружних пластинчастих елементів товщиною 100 - 200мкм, зміщених один відносного одного на 90°.
27. Мікроманіпулятор за будь-яким із пп. 21 - 26, який відрізняється тим, що рухливий столик двома симетричними пружинами, що працюють на розтягання і одним кінцем закріплені на нерухомому кронштейні, а іншим - на рухливому столику, притискається через кульку до нерухомого кронштейна.
28. Мікроманіпулятор за будь-яким із пп. 1, 21 - 27, який відрізняється тим, що він оснащений пристроєм автоматичного відключення відповідного напрямку обертання п'єзоелектричного приводу в крайніх положеннях.
29. Мікроманіпулятор по п. 28, який відрізняється тим, що пристрій автоматичного відключення виконано у вигляді двох мікроперемикачів, розташованих на рамі по осі переміщення кулачка, закріпленого на рухливому столику, причому кожен мікроперемикач приєднаний до відповідного кільцевого п'єзоелемента таким чином, що у початковому стані він комутує ланцюг живлення відповідного п'єзоелемента і розриває ланцюг живлення відповідного п'єзоелемента при спрацьовуванні мікроперемикача.
30. Мікроманіпулятор за будь-яким із пп. 1 - 29, який відрізняється тим, що додатково такий самий другий мікроманіпулятор установлений на першому таким чином, що осі переміщення рухливих столиків перпендикулярні між собою.
31. Мікроманіпулятор по п. 30, який відрізняється тим, що додатково такий самий третій мікроманіпулятор установлений на другому таким чином, що всі три осі переміщення рухливих столиків ортогональні між собою.
32. Мікроманіпулятор по п. 30, п. 31, який відрізняється тим, що усі мікроманіпулятори сполучаються між собою через спеціальні уступи - п'яти, виконані на перехідних елементах, рухливих столиках і рамах, з можливістю утворення міжплощинних повітряних зазорів.
33. Мікроманіпулятор за будь-яким із пп. 1 - 29, який відрізняється тим, що він установлений на рухливій вертикальній осі, що кріпиться на струбцині таким чином, що його вісь переміщення спрямована уздовж поперечної координати робочого столу, а сполучення мікроманіпулятора з віссю виконано через рухливий столик.
34. Мікроманіпулятор по п. 30, п. 33, який відрізняється тим, що вісь переміщення другого мікроманіпулятора спрямована уздовж подовжньої координати робочого столу, а його сполучення з рамою першого мікроманіпулятора виконано через рухливий столик.
35. Мікроманіпулятор по п. 31, п. 34, який відрізняється тим, що вісь переміщення третього мікроманіпулятора спрямована вертикально до площини робочого столу, а його кріплення виконане через прямокутний кронштейн із бічними ребрами жорсткості, що сполучається з рамою другого мікроманіпулятора і рамою третього мікроманіпулятора.
36. Мікроманіпулятор по п. 1, який відрізняється тим, що рухливий столик жорстко сполучений з валом приводу.
37. Мікроманіпулятор по п. 36, який відрізняється тим, що на рухливому столику встановлений другий мікроманіпулятор, причому вали приводів перпендикулярні між собою.
38. Мікроманіпулятор по п. 36, який відрізняється тим, що на рухливому столику зі зсувом щодо вала встановлений другий мікроманіпулятор таким чином, що вали приводів паралельні між собою.
39. Мікроманіпулятор по п. 38, який відрізняється тим, що на рухливому столику другого мікроманіпулятора встановлений третій мікроманіпулятор таким чином, що вал третього мікроманіпулятора перпендикулярний валу другого мікроманіпулятора.
Текст
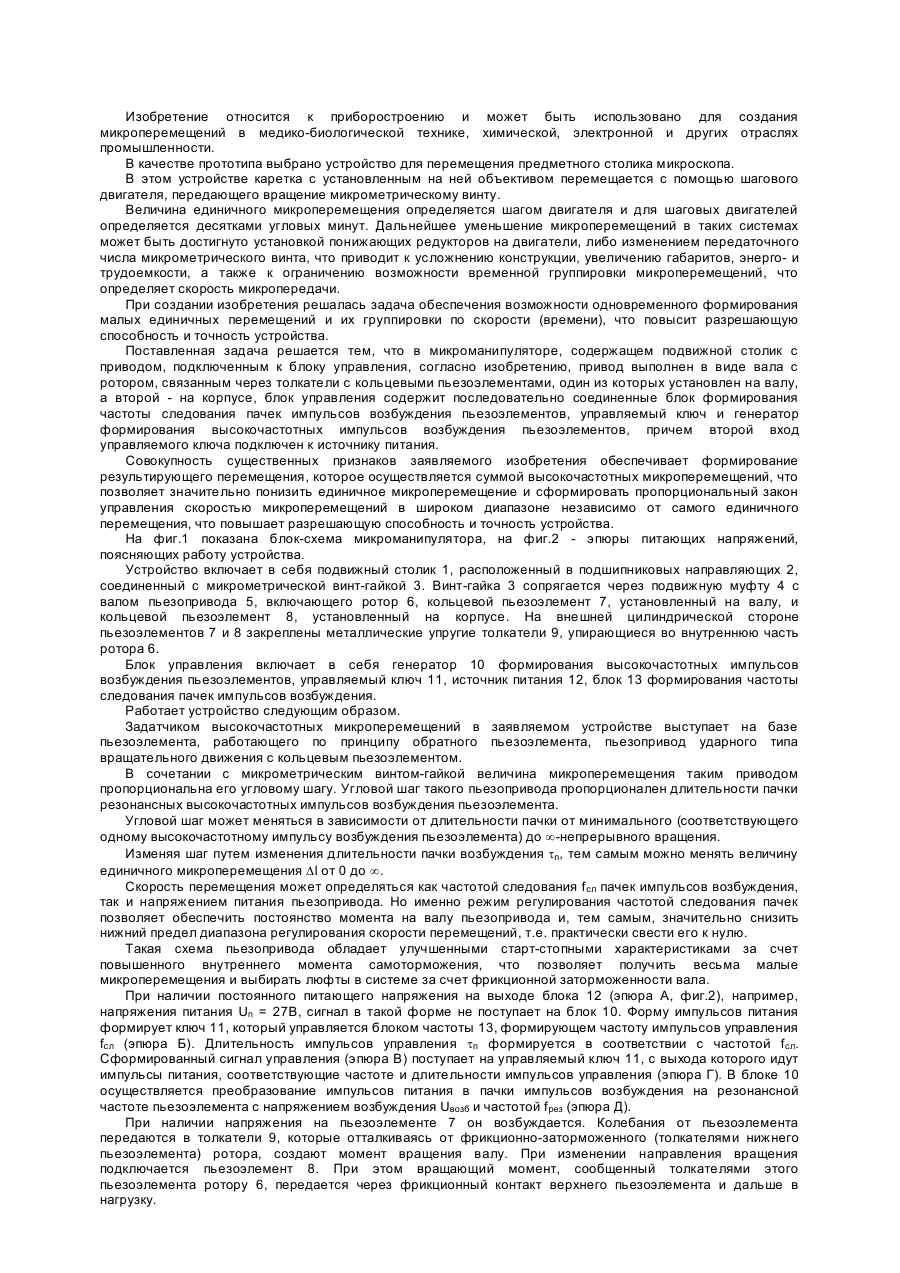
1. Мікроманіпулятор, що містить рухливий столик, з'єднаний із приводом, підключеним до блока керування, причому привід виконаний у вигляді вала з ротором, зв'язаним через штовхачі з кільцевими п'єзоелементами, один із яких установлений на валу, а другий установлений на корпусі, який відрізняється тим, що блок керування кожного п'єзоелемента виконаний у вигляді послідовно з'єднаних генератора високочастотних імпульсів збудження п'єзоелемента, керованого ключа і підсилювача, приєднаного до відповідного п'єзоелемента. 2. Мікроманіпулятор по п. 1, який відрізняється тим, що кожен блок керування відповідного п'єзоелемента додатково оснащений послідовно з'єднаними блоком формування частоти пачок імпульсів збудження п'єзоелемента і блоком формування тривалості пачки імпульсів збудження п'єзоелемента, підключеним до керуючого входу ключа. 3. Мікроманіпулятор по п. 2, який відрізняється тим, що частота пачок імпульсів збудження більше 2 кГц. 4. Мікроманіпулятор по п. 2, який відрізняється тим, що до керуючого входу кожного блока формування тривалості пачки імпульсів збудження п'єзоелемента підключений джойстик. 5. Мікроманіпулятор по п. 4, який відрізняється тим, що тривалість пачки імпульсів збудження на виході блока формування тривалості пропорційна відхиленню ручки джойстика. 6. Мікроманіпулятор по п. 4, який відрізняється тим, що тривалість пачки імпульсів збудження на виході блока формування тривалості пропорційна логарифму відхилення ручки джойстика. 7. Мікроманіпулятор за будь-яким із пп. 2-6, який відрізняє ться тим, що один з ви ходів генератора високочастотних імпульсів збудження п'єзоелемента підключений до входу блока формування частоти пачок імпульсів збудження п'єзоелемента. 8. Мікроманіпулятор по п. 1, який відрізняється тим, що блок керування п'єзоелемента оснащений 2 (19) 1 3 71044 4 кільця, встановленого в нарізний фіксуючий паз у мікрометричний гайкою й одним кінцем через корпусі приводу, фторопластового кільця, встанокульку упирається в нерухомий кронштейн, закріпвленого в нарізний фіксуючий паз у притискному лений на рамі, а іншим кінцем з'єднаний з валом фланці, і стійок кріплення притискного фланця до приводу, причому між мікрометричною різьбою і корпуса приводу. елементом кріплення гвинта до вала виконаний 18. Мікроманіпулятор по п. 1, який відрізняється пружний зв'язок у вигляді ряду прорізів з утворентим, що, кріплення першого п'єзоелемента, устаням тонких пружних пластинчастих елементів тоновленого на валу приводу, виконано у вигляді вщиною 100 - 200мкм, зміщених один відносного гумового кільця, встановленого в нарізний фіксуюодного на 90°. чий паз на осьовому фланці, жорстко з'єднаному з 27. Мікроманіпулятор за будь-яким із пп. 21 - 26, валом, фторопластового кільця, встановленого в який відрізняється тим, що р ухливий столик двонарізний фіксуючий паз у притискному фланці, і ма симетричними пружинами, що працюють на стійок кріплення притискного фланця до жорстко розтягання і одним кінцем закріплені на нерухоз'єднаного з валом осьового фланця. мому кронштейні, а іншим - на рухливому столику, 19. Мікроманіпулятор по п. 1, який відрізняється притискається через кульку до нерухомого кронтим, що корпус приводу виконаний у вигляді квадштейна. ратного фланця з циліндричними проточками і 28. Мікроманіпулятор за будь-яким із пп. 1, 21 - 27, додатково оснащений кожухом, причому кожух який відрізняється тим, що він оснащений привиконаний у вигляді товстостінного циліндра, що строєм автоматичного відключення відповідного закінчується аналогічним квадратним фланцем, напрямку обертання п'єзоелектричного приводу в що жорстко з'єднані між собою. крайніх положеннях. 20. Мікроманіпулятор по п. 19, який відрізняється 29. Мікроманіпулятор по п. 28, який відрізняється тим, що вал встановлюється в підшипники кочентим, що пристрій автоматичного відключення виня, один із яких встановлений у корпусі, а інший - в конано у вигляді двох мікроперемикачів, розташокожусі, причому робоча частина вала виходить з ваних на рамі по осі переміщення кулачка, закріпбоку корпуса. леного на рухливому столику, причому кожен 21. Мікроманіпулятор по п. 1, який відрізняється мікроперемикач приєднаний до відповідного кільтим, що рухливий столик виконаний у складених цевого п'єзоелемента таким чином, що у початколінійних направляючих і з'єднаний із приводом вому стані він комутує ланцюг живлення відповідчерез гвинт-гайку, причому мікрометрична гайка ного п'єзоелемента і розриває ланцюг живлення жорстко закріплена на рухливому столику. відповідного п'єзоелемента при спрацьовуванні 22. Мікроманіпулятор по п. 21, який відрізняється мікроперемикача. тим, що рухливий столик виконаний у вигляді ро30. Мікроманіпулятор за будь-яким із пп. 1 - 29, бочої поверхні з посадковими місцями, зі зворотної який відрізняється тим, що додатково такий састорони якого виконані посадковий отвір для мікмий другий мікроманіпулятор установлений на рометричної гайки і суцільний подовжній кронпершому таким чином, що осі переміщення рухлиштейн із посадковою площиною, перпендикулярвих столиків перпендикулярні між собою. ною робочій поверхні столика і паралельній осі 31. Мікроманіпулятор по п. 30, який відрізняється посадкового отвору для мікрометричної гайки, а з тим, що додатково такий самий третій мікроманііншого боку встановлений аналогічний кронштейн пулятор установлений на другому таким чином, із можливістю його попередньої орієнтації в площо всі три осі переміщення рухливих столиків орщині, паралельній площині столика, при цьому на тогональні між собою. обидві посадкові площини кожного кронштейна 32. Мікроманіпулятор по п. 30, п. 31, який відрізвстановлені напрямні з можливістю їх попередньої няється тим, що усі мікроманіпулятори сполучаорієнтації на посадкових площинах, перпендикуються між собою через спеціальні уступи - п'яти, лярних площині столика. виконані на перехідних елементах, рухливи х сто23. Мікроманіпулятор по п. 22, який відрізняється ликах і рамах, з можливістю утворення міжплотим, що напрямні рухливого столика сполучені щинних повітряних зазорів. через кульки чи ролики з бічними напрямними, що 33. Мікроманіпулятор за будь-яким із пп. 1 - 29, закріплені на площинах прямокутних косинців з який відрізняється тим, що він установлений на можливістю їх попередньої орієнтації в цих плорухливій вертикальній осі, що кріпиться на струбщинах, а косинці закріплені ортогональними плоцині таким чином, що його вісь переміщення спрящинами на рамі з можливістю їх попередньої оріємована уздовж поперечної координати робочого нтації в площині рами. столу, а сполучення мікроманіпулятора з віссю 24. Мікроманіпулятор по п. 23, який відрізняється виконано через рухливий столик. тим, що рама виконана у ви гляді суцільного пря34. Мікроманіпулятор по п. 30, п. 33, який відрізмокутного кронштейна з фланцем для кріплення няється тим, що вісь переміщення другого мікроприводу і бічними ребрами жорсткості. маніпулятора спрямована уздовж подовжньої ко25. Мікроманіпулятор по п. 24, який відрізняється ординати робочого столу, а його сполучення з тим, що сполучення бічних косинців, приводу й рамою першого мікроманіпулятора виконано через інших елементів з рамою здійснюється через сперухливий столик. ціальні уступи - п'яти, виконані на посадкових 35. Мікроманіпулятор по п. 31, п. 34, який відрізплощинах рами, з можливістю утворення міжплоняється тим, що вісь переміщення третього мікщинних повітряних зазорів. романіпулятора спрямована вертикально до пло26. Мікроманіпулятор за будь-яким із пп. 21 - 25, щини робочого столу, а його кріплення виконане який відрізняється тим, що гвинт сполучений з через прямокутний кронштейн із бічними ребрами 5 71044 6 жорсткості, що сполучається з рамою другого мік38. Мікроманіпулятор по п. 36, який відрізняється романіпулятора і рамою третього мікроманіпулятим, що на рухли вому столику зі зсувом щодо вала тора. встановлений другий мікроманіпулятор таким чи36. Мікроманіпулятор по п. 1, який відрізняється ном, що вали приводів паралельні між собою. тим, що рухливий столик жорстко сполучений з 39. Мікроманіпулятор по п. 38, який відрізняється валом приводу. тим, що на рухливому столику другого мікромані37. Мікроманіпулятор по п. 36, який відрізняється пулятора встановлений третій мікроманіпулятор тим, що на рухливому столику встановлений друтаким чином, що вал третього мікроманіпулятора гий мікроманіпулятор, причому вали приводів перперпендикулярний валу другого мікроманіпулятопендикулярні між собою. ра. Винахід відноситься до точного приладобудування і може використовуватись для створення мікропереміщень у мікронних і субмікронних діапазонах у клітинних мікротехнологіях (біотехнологія, генна інженерія, репродуктивна біологія і медицина, нейробіологія, мікрофізіологія, цитологія і т.д.), у машинобудівній, електронній і інших галузях промисловості. Відомі ручні мікроманіпулятори MN-2, MN-3, MMN-1, MN-151, MN-152 і т.д. фірми "NARJSHIGE" (JAPAN). Основою даного мікроманіпулятора є рухливий столик у лінійних направляючих і ручний привід, з'єднаний через гвинт-гайку зі столиком. Ручний мікроманіпулятор дотепер є найбільш простим і надійним, дешевим та широко розповсюдженим мікроманіпулятором. Однак ручні мікроманіпулятори мають порівняно невисоку роздільну здатність (~10...100мкм), що різко обмежує область їх використання. Відомі мікроманіпулятори, засновані на моторизованому мікропереміщенні рухливого столика. Це мікроманіпулятор "ЕЕ" фірми "LEITZ" (Germany), "MM-88" фірми "NARISHIGE" і т.д. У таких мікроманіпуляторах ручний привід замінений на двигун постійного струму, що забезпечує високу плавність ходу, відсутність вібрацій і т.д. Однак дані мікроманіпулятори, мають незначну роздільну здатність (~10мкм), а невисокі динамічні характеристики утрудняють вільне маневрування в полі зору мікроскопа. Відомий моторизований мікроманіпулятор на крокових двигуна х "DC 3001" фірми "World Precision Instruments" USA (каталог фірми за 1994p., стор.47). Цей мікроманіпулятор включає рухливий столик, з'єднаний через гвинт-гайку зі кроковим двигуном, підключеним до блоку керування. Робота даного мікроманіпулятора здійснюється наступним чином. За допомогою блоку керування на кроковий двигун формуються команди, що реалізують одиничні мікропереміщення, а також виконується угруповання цих мікропереміщень у часі, що визначає швидкість мікропереміщень. Величина одиничного мікропереміщення (роздільна здатність) при такому принципі мікроманіпулювання й у такому мікроманіпуляторі визначається кроком двигуна і для кращих крокових двигунів складає десятки кутових хвилин. У мікроманіпуляторі DC 3001 величина мінімального одиничного мікропереміщення складає ~0,5мкм, що в перерахуванні на кутовий крок двигуна (з передаточним відношенням мікрометричного гвинтагайки 1/300) складає ~30кут.хв. Подальше змен шення мікропереміщень у таких системах може бути досягнуто установкою понижуючих редукторів на двигуни, чи зміною передаточного відношення мікрометричного гвинта, що приводить до ускладнення конструкції, збільшенню габаритів, трудомісткості, а також до обмеження можливості тимчасового угруповання мікропереміщень, що визначає швидкість мікроподачі. Мікропереміщення при такій ідеології побудови системи однозначно зав'язані на швидкість і навпаки. Вищевказані недоліки усунуті в мікроманіпуляторі за патентом України №26075 "Мікроманіпулятор" (М. кл. G02В21/32), який і обраний як прототип. Такий мікроманіпулятор, фіг.1, містить рухливий столик 1, розташований у підшипникових направляючих 2, з'єднаний з мікрометричною гвинтом-гайкою 3, сполученою через рухливу муфту 4 з п'єзоелектричним приводом 5 у виді вала з ротором 6, зв'язаним через штовхачі 9 з кільцевими п'єзоелементами 7 і 8, один з котрих встановлений на валу, а другий на корпусі, і систему керування, що складається з генератора 10 високочастотних імпульсів збудження п'єзоелементів, керованого ключа 11, формувача 13 частоти пачок імпульсів збудження п'єзоелементів і джерела живлення 12. Працює даний пристрій наступним чином. За допомогою формувача 13 формується частота і тривалість сигналів керування, що надходять на керований ключ 11, з виходу якого йдуть відповідні імпульси живлення. У генераторі 10 здійснюється перетворення імпульсів живлення в пачки імпульсів збудження на резонансній частоті п'єзоелементів. Під дією цих імпульсів, наприклад у п'єзоелементі 7, формуються механічні коливання. Ці коливання передаються в штовхачі 9, які відштовхуючись від фрикційно-загальмованого штовхачами нижнього п'єзоелемента ротора, формують мікропереміщення вала. При зміні напрямку обертання підключається п'єзоелемент 8. При цьому обертаючий момент, який надається штовхачами цього п'єзоелемента ротору 6, передається через фрикційний контакт верхнього п'єзоелемента і далі в вал. Крок мікропереміщення в такому пристрої визначається тривалістю пачки імпульсів збудження п'єзоелемента, що формується за допомогою блоку 13, а швидкість мікропереміщення - також за допомогою блоку 13, що формує і частоту проходження цих пачок. Даний пристрій дозволяє формувати кутовий крок на рівні десятків кутових секунд, що в перерахуванні на стандартні гвинти-гайки еквівалентно лінійному переміщенню ~10-2мкм, а також реалізу 7 71044 8 вати великий діапазон регулювання по швидкості, хвильовою оболонкою, на якій установлені штовза рахунок тимчасового угруповання мікропереміхачі, що упираються у внутрішню поверхню ротощень. ра. Однак високий рівень роздільної здатності таКільцеві п'єзоелементи поляризовані по норкої системи і широкий діапазон регулювання по малі до їх плоских торцевих поверхней, а електрошвидкості досягається за рахунок «жорсткої» ди нанесені на плоскі торцеві поверхні, а їхні пастарт-стопної характеристики п'єзоелектричного раметри задовольняють співвідношенню D/d~2, приводу і системи керування (за рахунок швидкого d/2~h, де D-зовнішній діаметр кільцевого п'єзорозгону і гальмування системи). Іншими словами, елемента, d-внутрішній діаметр кільцевого п'єзочим більш «жорстка» старт-стопна характеристиелемента, h-висота кільцевого п'єзоелемента, а ка, тим вище рівень роздільної здатності, але, з частота генератора високочастотних імпульсів іншого боку, тим і ви ще рівень механічних мікрозбудження п'єзоелементів відповідає нульовій мозбурювань, що супроводжують одиничний крок. ді радіальних коливань п'єзоелемента. Цей ефект збільшується, коли при формуванні Хвильова оболонка виконана у вигляді тонкошвидкості переміщення відбувається формування стінного циліндра з відверненими з двох сторін одиничних кроків у безупинні послідовності кроків. полями, що утворюють кільцеві ребра жорсткості, При цьому одиничні механічні мікрозбурювання причому згадані ребра жорсткості розсічені щілитрансформуються в безупинну вібрацію всього нами, у яких одним кінцем закріплені штовхачі, мікроманіпулятора. Системи ж такого класу повипричому што вхачі можуть бути встановлені під нні бути «вільні» від вібрацій, тому що незначні кутом до радіального напрямку, і на штовхачі вібрації на мікроманіпуляторі можуть приводити до встановлені оболонки зі звукоізоляційного матерізначних рівнів вібрацій на мікрооб'єкті (наприклад, алу. мікропіпетці), а це мікронні і субмікронні діапазони. Ротор виконаний у виді двох тонкостінних циЦе у свою чергу різко обмежує рівень роздільної ліндрів, установлених на осьовій системі, що викоздатності системи і діапазон регулювання по нана у виді циліндричного підшипника ковзання зі швидкостях. звукоізоляційного матеріалу з центральним фланПри створенні винаходу вирішувались задачі: цем, на якому закріплені тонкостінні циліндри. зменшення вібрацій мікроманіпулятора; підвищенКріплення другого п'єзоелементу, установленя роздільної здатності (точності); зменшення ного на корпусі привода виконано у виді гумового одиничних мікропереміщень; розширення діапазокільця, встановленого в нарізний паз у корпусі ну регулювання по швидкості; розширення функціпривода, фторопластового кільця, встановленого ональних можливостей мікроманіпулятора. в нарізний паз у притискному фланці, і стійок кріпЦя задача вирішувалась за рахунок того, що в лення притискного фланця до корпуса привода, а мікроманіпуляторі, що містить рухливий столик, кріплення першого п'єзоелемента, установленого з'єднаний із приводом, підключеним до блоку кена валу привода виконано у виді гумового кільця, рування, причому привід виконаний у виді вала з встановленого в нарізний паз на фланці, жорстко ротором, зв'язаним через штовхачі з кільцевими з'єднаному з валом, фторопластового кільця, п'єзоелементами, один із яких установлений на встановленого в нарізний паз у притискному флавалу, а др угий установлений на корпусі, блок кенці, і стійок кріплення притискного фланця до жоррування виконаний у виді послідовно з'єднаних стко з'єднаного з валом фланця. генератора високочастотних імпульсів збудження Корпус приводу виконаний у виді жорсткого п'єзоелемента, керованого ключа і підсилювача, квадратного фланця з циліндричними проточками і приєднаного до відповідного п'єзоелементу. додатково обладнаний кожухом, причому кожух Додатково, послідовно з'єднані блок формувиконаний у виді товстостінного циліндра, що завання частоти пачок імпульсів збудження п'єзокінчується аналогічним товстим фланцем, що жорелемента і блок формування тривалості пачки стко з'єднані між собою. імпульсів збудження, підключений до керуючого Вал двигуна встановлюється в підшипники кавходу ключа. чіння, один із яких встановлений у корпусі, а інший Частота пачок імпульсів збудження більше в кожусі і виходить з боку корпуса. 2кГц, а до керуючого входу кожного блоку формуРухливий столик виконаний у лінійних направвання тривалості пачки імпульсів збудження п'єзоляючих і з'єднаний із приводом через гвинт-гайку. елемента підключений джойстик, при цьому триРухливий столик виконаний у виді робочої повалість пачки імпульсів збудження на виході блоку верхні з посадковими місцями, зі зворотної стороформування тривалості пропорційна "відхиленню", ни якої виконаний посадковий отвір для гайки з або логарифму "відхилення" джойстика, а один з гвинтом і цільний подовжній кронштейн із посадковиходів генератора високочастотних імпульсів вою площиною, перпендикулярною робочій поверзбудження п'єзоелемента підключений до входу хні столика і паралельній осі посадкового отвору блоку формування частоти пачок імпульсів збудля гайки з гвинтом, а з іншої сторони встановледження п'єзоелемента. ний аналогічний кронштейн із можливістю його Додатково, блок керування постачений блоком попередньої орієнтації в площині, паралельній формування одиночної пачки імпульсів збудження площині столу, при цьому на обидві посадкові п'єзоелемента, підключеним до керуючого входу площини кожного кронштейна встановлені напраключа. вляючі з можливістю їхньої попередньої орієнтації Кільцеві п'єзоелементи виконані у виді кільцев посадкових площинах, перпендикулярних плових резонаторів з радіальною формою коливань, щині столу. Направляючі рухливого столика спозовнішня циліндрична поверхня яких охоплена лучені через кульки або ролики з бічними направ 9 71044 10 ляючими, що закріплені на площинах прямокутних гляді нерухомого кронштейну, який жорстко сполукосинців з можливістю їхньої попередньої орієнтачений з валом приводу. ції в ци х площинах, а косинці закріплені ортогонаДодатково, на такому рухливому столику льними площинами на рамі з можливістю їхньої встановлений другий такий же мікроманіпулятор, попередньої орієнтації в площині рами. причому вали приводів ортогональні між собою. Рама виконана у виді цільного прямокутного Додатково, на рухливому столику зі зсувом кронштейна з фланцем для кріплення привода і щодо вала встановлений другий мікроманіпулятор бічних ребер жорсткості. Сполучення бічних коситаким чином, що вали приводів паралельні між нців, привода й інших елементів з рамою здійснюсобою. ється через спеціальні уступи-п'яти, виконані на Додатково, на рухливому столику др угого мікпосадкових площинах рами, з можливістю утвороманіпулятора встановлений третій мікроманіпурення міжплощинних повітряних зазорів. лятор таким чином, що вал третього мікроманіпуГайка жорстко закріплена на рухливому столилятора ортогонален валу другого ку, гвинт сполучений з гайкою й одним кінцем чемікроманіпулятора. рез кульку упирається в нерухомий кронштейн, На фіг.1 зображена кінематична схема мікрозакріплений на рамі, а іншим кінцем з'єднаний з маніпулятора - прототипу і блок - схема його керувалом двигуна, причому між різьбою і елементом вання (1 - рухливий столик, 2 - підшипникові накріплення гвинта до вала виконаний пружний зв'яправляючі, 3 - мікрометрична гвинт-гайка, 4 зок у виді ряду прорізів з утворенням тонких пружрухлива муфта, 5 - п'єзоелектричний привод, 6 них пластинчастих елементів, зміщених друг щодо ротор; 7, 8 - кільцеві п'єзоелементи, 9 - штовхачі; друга на 90°. 10 - генератор високочастотних імпульсів збуРухливий столик двома симетричними пружидження п'єзоелементів; 11 - керований ключ; 12 нами, що працюють на розтягання, і одним кінцем джерело живлення; 13 - формувач частоти пачок закріпленими на нерухомому кронштейні, а іншим імпульсів збудження п'єзоелементів. на рухливому столику, притискається через кульку На фіг.2 зображена кінематична схема запродо нерухомого кронштейна. понованого мікроманіпулятора і блок-схема керуДодатково, мікроманіпулятор постачений привання мікроманіпулятором (1 - рухливий столик; 2 строєм автоматичного відключення відповідного - лінійні направляючі; 3 - люфтовибірні пружини; 4 напрямку обертання п'єзоелектричного двигуна в - мікрометрична гайка; 5 - гвинт; 6 - пружний зв'якрайніх положеннях. зок; 7 - вал п'єзоелектричного приводу; 8 - п'єзоПристрій автоматичного відключення виконано електричний привід; 9 - ротор; 10, 11 - кільцеві у виді двох мікроперемикачів, розташованих на п’єзоэлементи; 12 - штовхачі; 13 - корпус; 14 - підрамі на осі руху переміщення рухливого столика і силювачі; 15 - керовані ключі; 16 - генератори вирухливого кулачка, закріпленого на рухливому сокочастотних імпульсів збудження п'єзоелеменстолику і розташованого між мікроперемикачами, тів; 17 - блоки формування частоти пачок причому кожен мікроперемикач приєднаний до імпульсів збудження п'єзоелементів; 18 - блоки відповідного кільцевого п'єзоелементу таким чиформування тривалості пачки імпульсів збудження ном, що у вихідному стані він комутує ланцюг живп'єзоелементів; 19 - джойстики (наприклад, резислення відповідного п'єзоелемента, і розриває лантивні); 20 - блок формування одиночної пачки імцюг живлення відповідного п'єзоелемента при пульсів збудження п'єзоелементів. спрацьовуванні мікроперемикача. На фіг.3 зображені епюри сигналів, що поясДодатково такий же третій мікроманіпулятор нюють роботу пристрою (Ug - сигнал на виході геустановлений на другому таким чином, що всі три нератора 16 високочастотних імпульсів збудження осі переміщення рухли вих столиків ортогональні. п'єзоелементів; UFшаг - си гнал на виході блоку 17 Усі мікроманіпулятори сполучаються між соформування частоти пачок імпульсів збудження бою через спеціальні уступи-п'яти, виконані на п'єзоелементів; Utи - сигнал на виході блоку 18 перехідних елементах, рухливи х столиках і рамах, формування тривалості пачки імпульсів збудження з можливістю утворення міжплощинних повітряних п'єзоелементів; Uc - сигнал п'єзоелементів; UFшаг зазорів. сигнал на виході блоку 17 формування частоти Перший мікроманіпулятор установлений на пачок імпульсів збудження п'єзоелементів; Utи рухливій вертикальній осі, що кріпитися на струбсигнал на виході блоку 18 формування тривалості цині, таким чином, що його вісь переміщення пачки імпульсів збудження п'єзоелементів; Uc спрямована уздовж поперечної координати столу, сигнал на виході керованого ключа 15; Uпэ - сигнал а сполучення мікроманіпулятора з віссю виконано на п'єзоелементі; L - мікропереміщення рухливої через рухливий столик. каретки; j - кутове мікропереміщення вала привоВісь переміщення другого мікроманіпулятора да). спрямована уздовж подовжньої координати столу, На фіг.4 зображена конструкція п'єзоелектрича його сполучення з рамою першого мікроманіпуного приводу з високочастотним режимом керулятора виконано через рухливий столик. вання, високим рівнем роздільної здатності і мініВісь переміщення третього мікроманіпулятора мальним рівнем супутніх механічних спрямована вертикально площині столу, а його мікрозбурювань (1, 2 - кільцеві п'єзоелементи; 3 кріплення виконане через косинець з бічними ребхвильові оболонки; 4 - штовхачі; 5, 6 - тонкостінні рами жорсткості, що сполучається з рамою другого циліндри ротора; 7 - осьова система ротора; 8 мікроманіпулятора і рамою третього мікроманіпугумові кільця; 9 - фторопластові кільця; 10 - корлятора. пус; 11 - кожух; 12 - притискні фланці; 13 - осьовий Рухливий столик може бути виконаний у вифланець; 14 - вал; 15 - підшипники). 11 71044 12 На фіг.4а представлена конструкція п'єзоелекричні приводи; 2, 5, 9 - рухливі столики; 3, 6, 10 тричного осцилятора (1(2) - кільцевий п'єзоелерами; 7 - перехідна пластина; 11 - перехідний прямент, виконаний у виді кільцевого резонатора з мокутний кронштейн; 13 - міжплощинні повітряні радіальною формою коливань; 3 - хвильова обозазори; 14 - вертикальна вісь; 15 - струбцина). лонка; 4 - штовхачі; 16 - плоский електрод; 17 На фіг.8 представлена конструкція мікроманінапрямок поляризації; 18 - тонкостінний циліндр; пулятора з одним обертальним ступенем рухомос19 - ребра жорсткості; 20 - щілини; D - зовнішній ті (1 - струбцина; 2 - привід; 3 - столик). діаметр кільцевого резонатора; d - внутрішній діаНа фіг.8а представлена конструкція мікромаметр кільцевого резонатора; h - висота кільцевого ніпулятора з двома обертальними ступенями рурезонатора). хомості (1 - струбцина; 2, 4 - приводи; 3, 5 - столиНа фіг.4б представлена конструкція ротора ки). п'єзоелектричного приводу (5, 6 - тонкостінні циліНа фіг.9 представлена конструкція мікроманіндри; 7 - осьова система; 21 - циліндричний підпулятора з плоскою полярною системою коордишипник ковзання; 22 - центральний фланець). нат (1 - струбцина; 2, 4 - приводи; 3, 5 - столики). На фіг.4в представлена конструкція осцилятоНа фіг.9а представлена конструкція мікромара зі звукоізоляційними оболонками (1 - кільцевий ніпулятора з циліндричною системою координат (1 п'єзоелемент; 3 - хвильова оболонка; 4 - штовхачі; - струбцина; 2, 4, 6 - приводи; 3, 5, 7 - столики). 23 - звукоізоляційні оболонки, або баласти). Сутність запропонованого технічного рішення На фіг.4г представлена конструкція вузла кріполягає в зменшенні рівня супутні х механічних плення нерухомого кільцевого п'єзоелемента 2 до вібрацій і одночасного підвищення роздільної здакорпуса приводу (2 - кільцевий п'єзоелемент; 8 тності, зменшенні одиничних мікропереміщень, гумове кільце; 9 - фторопластове кільце; 10 - коррозширенні діапазону регулювання по швидкості, пус; 12 - притискний фланець; 15 - підшипник карозширенні функціональних можливостей мікрочіння; 24, 25 - нарізні фіксуючі пази; 26 - стійки маніпулятор за рахунок комплексних схемотехнічкріплення; 28 - внутрішня циліндрична проточка; них і конструкційних методів, пов'язаних між со29 - зовнішня циліндрична проточка). бою. На фіг.4д представлена конструкція вузла крі1. Схемотехнічний метод передбачає насамплення рухливого кільцевого п'єзоелемента до перед перехід у високочастотну область керуванвала приводу (1 - кільцевий п'єзоелемент; 8 - гуня при формуванні мікропереміщень. Перехід у мове кільце; 9 - фторопластове кільце; 12 - притивисокочастотну область передбачає підвищення скний фланець; 13 - осьовий фланець; 14 - вал; 15 частоти проходження кроків, або частоти пачок - підшипник качіння; 25, 27 - нарізні фіксуючі пази; імпульсів збудження п'єзоелементів. 26 - стійки кріплення). Експериментально встановлено, що при форНа фіг.5 представлена конструкція одноосьомуванні мікропереміщень, частотний діапазон, вого лінійного мікроманіпулятора (1 - рухливий вільний від вібрацій, починається при частоті простолик; 2 - лінійні направляючі; 3 - п'єзоелектричходження кроків Fшаг³2кгц. При такому режимі кений привід; 4 - прецизійний гвинт; 5 - посадкові рування, період проходження кроків не повинний місця; 10 - настановні гвинти; 20 - міжплощинні перевищувати 500мкс. Однак тут настає явне проповітряні зазори). тиріччя, що зв'язане із суперпозицією загасаючих На фіг.5а представлена конструкція складеноелектромеханічних коливань на п'єзоелементі від го рухливого столика (1 - рухливий столик; 2 - ліпопереднього збудження і коливань, обумовлених нійні направляючі; 6 - посадковий отвір для гайки з новим пакетом збудження. Оскільки п'єзоелектригвинтом; 7 - цільний подовжній кронштейн; 8 - рухчний привід резонансна і досить добротна систеливий кронштейн; 9, 10 - настановні гвинти; 30 ма, то час загасання коливань на п'єзоелементі tзат посадкові отвори для кріплення кулачка). звичайно складає кілька сотень мікросекунд, унасНа фіг.5б, 5в представлені елементи конструлідок чого відбувається накладення стакції лінійного мікроманіпулятора (2 - лінійні напрарих(загасаючих) коливань на нові(збудливі). Розвляючі; 3 - п'єзоелектричний привід; 11 - кульки; 12 біжність фаз загасаючих і збудливих коливань - сепаратор; 13 - прямокутні косинці; 14 - настаноприводить до значних дестабілізаційних ефектів, вні гвинти; 15 - рама; 16 - отвори в рамі для настащо супроводжуються детонацією, вібрацією й удановних гвинтів для кріплення косинців; 17 - фларами аж до зупинки привода і втрати працездатнець рами; 18 - ребра жорсткості рами; 19 - уступи ності. - п'яти; 20 - міжплощинні повітряні зазори; 21 Забезпечення стійкої роботи мікроманіпулятопрецизійна гайка; 22 - опірна кулька; 23 - нерухора при проходженні пакетів збудження з періодом мий кронштейн; 24 - люфтовибірний гвинт; 25 t
ДивитисяДодаткова інформація
Назва патенту англійськоюMicromanipulator
Автори англійськоюPetrenko Serhii Fedorovych
Назва патенту російськоюМикроманипулятор
Автори російськоюПетренко Сергей Федорович
МПК / Мітки
МПК: G02B 21/32
Мітки: мікроманіпулятор
Код посилання
<a href="https://ua.patents.su/16-71044-mikromanipulyator.html" target="_blank" rel="follow" title="База патентів України">Мікроманіпулятор</a>
Мікроманіпулятор
Номер патенту: 26075
Опубліковано: 30.04.1999
Автори: Корсак Віктор Олександрович, Петренко Сергій Федорович
МПК: G02B 21/32
Мітки: мікроманіпулятор
Формула / Реферат:
Микроманипулятор, содержащий подвижный столик с приводом, подключенным к блоку управления, отличающийся тем, что привод выполнен в виде вала с ротором, связанным через толкатель с кольцевыми пьезоэлементами, один из которых установлен на валу, а второй - на корпусе, при этом блок управления содержит последовательно соединенные блок формирования частоты пачек импульсов возбуждения, управляемый ключ и генератор формирования высокочастотных...
Спосіб регулювання напруги синхронного генератора
Номер патенту: 38469
Опубліковано: 15.05.2001
Автори: Алаєв Віктор Васильович, Зонтов Роман Миколайович, Шоцький Олександр Миколайович
МПК: H03L 5/00
Мітки: напруги, генератора, синхронного, спосіб, регулювання
Текст:
...при значному зменшенні напруга СГ від номінального значення напруга живлення постійно підключена до обмотки збудження, струм збудження зростає, напруга СГ відновлюється. Навпаки, при значному збільшенні напруги СГ від номінального значення напруга живлення відключена від обмотки збудження, струм збудження зменшується, напруга СТ відновлюється. Реальними параметрами способу є: 1. Кількість тактів випрямлення напруги СГ і, отже, частота подачі...
Попередній патент: Спосіб оцінки стійкості генотипів льону до фузаріозу
Наступний патент: Лужний нікелькадмієвий акумулятор
Випадковий патент: Спосіб оцінки риску розвитку тромботичних ускладнень при ішемічному інсульті головного мозку