Мікроманіпулятор
Номер патенту: 26075
Опубліковано: 30.04.1999
Автори: Корсак Віктор Олександрович, Петренко Сергій Федорович
Формула / Реферат
Микроманипулятор, содержащий подвижный столик с приводом, подключенным к блоку управления, отличающийся тем, что привод выполнен в виде вала с ротором, связанным через толкатель с кольцевыми пьезоэлементами, один из которых установлен на валу, а второй - на корпусе, при этом блок управления содержит последовательно соединенные блок формирования частоты пачек импульсов возбуждения, управляемый ключ и генератор формирования высокочастотных импульсов возбуждения пьезоэлементов, причем вход управляющего ключа подключен к источнику питания.
Текст
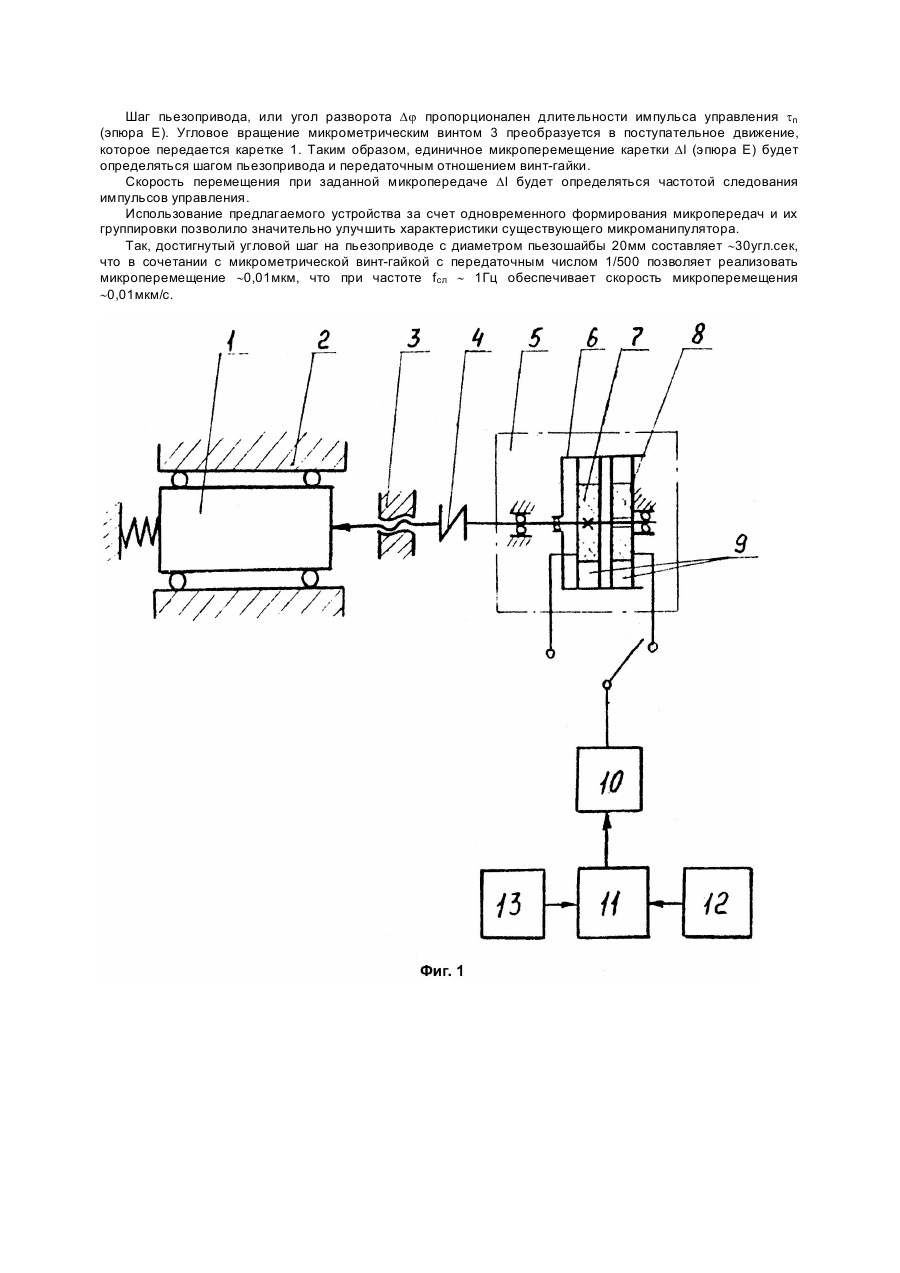
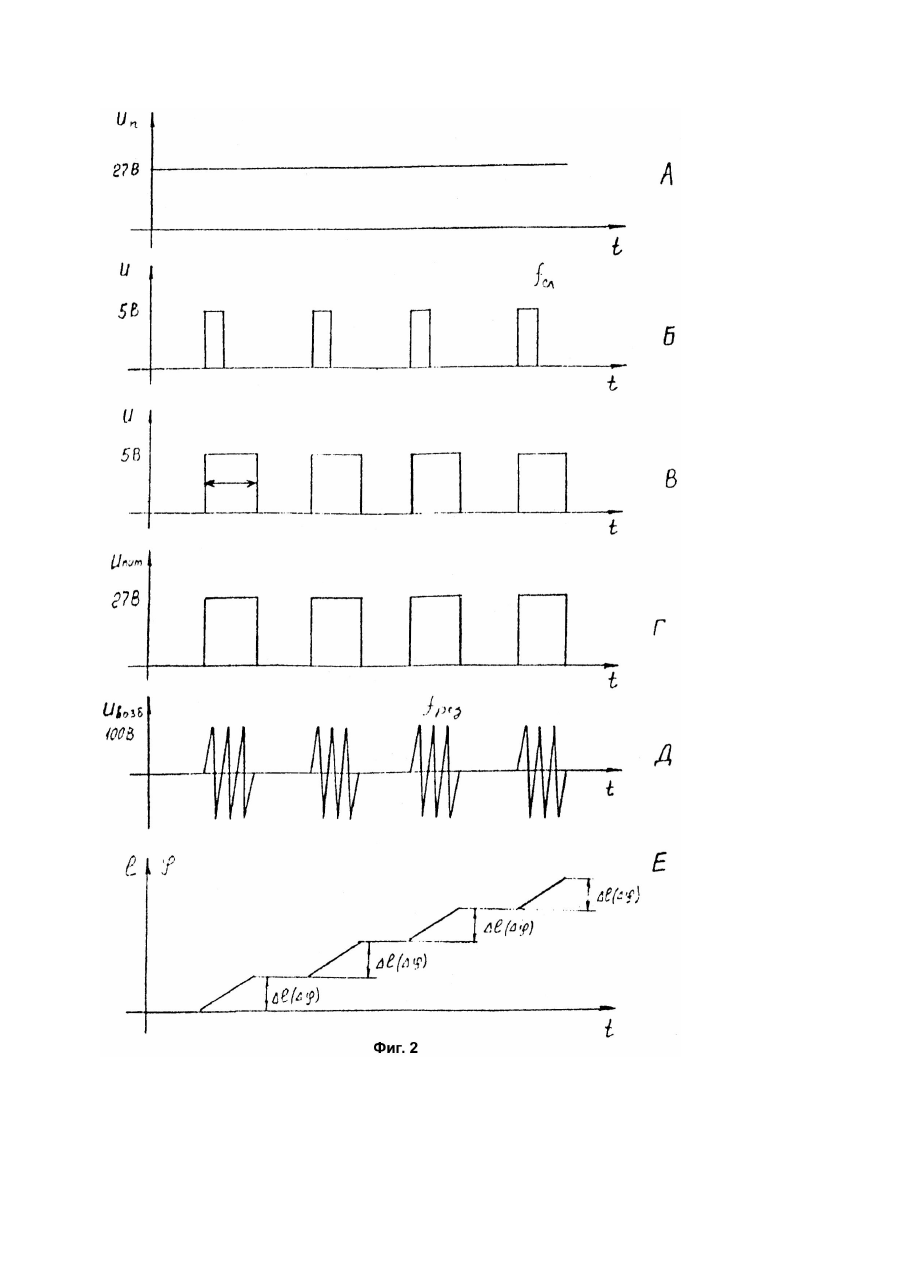
Изобретение относится к приборостроению и может быть использовано для создания микроперемещений в медико-биологической технике, химической, электронной и других отраслях промышленности. В качестве прототипа выбрано устройство для перемещения предметного столика микроскопа. В этом устройстве каретка с установленным на ней объективом перемещается с помощью шагового двигателя, передающего вращение микрометрическому винту. Величина единичного микроперемещения определяется шагом двигателя и для шаговых двигателей определяется десятками угловых минут. Дальнейшее уменьшение микроперемещений в таких системах может быть достигнуто установкой понижающих редукторов на двигатели, либо изменением передаточного числа микрометрического винта, что приводит к усложнению конструкции, увеличению габаритов, энерго- и трудоемкости, а также к ограничению возможности временной группировки микроперемещений, что определяет скорость микропередачи. При создании изобретения решалась задача обеспечения возможности одновременного формирования малых единичных перемещений и их группировки по скорости (времени), что повысит разрешающую способность и точность устройства. Поставленная задача решается тем, что в микроманипуляторе, содержащем подвижной столик с приводом, подключенным к блоку управления, согласно изобретению, привод выполнен в виде вала с ротором, связанным через толкатели с кольцевыми пьезоэлементами, один из которых установлен на валу, а второй - на корпусе, блок управления содержит последовательно соединенные блок формирования частоты следования пачек импульсов возбуждения пьезоэлементов, управляемый ключ и генератор формирования высокочастотных импульсов возбуждения пьезоэлементов, причем второй вход управляемого ключа подключен к источнику питания. Совокупность существенных признаков заявляемого изобретения обеспечивает формирование результирующего перемещения, которое осуществляется суммой высокочастотных микроперемещений, что позволяет значительно понизить единичное микроперемещение и сформировать пропорциональный закон управления скоростью микроперемещений в широком диапазоне независимо от самого единичного перемещения, что повышает разрешающую способность и точность устройства. На фиг.1 показана блок-схема микроманипулятора, на фиг.2 - эпюры питающих напряжений, поясняющих работу устройства. Устройство включает в себя подвижный столик 1, расположенный в подшипниковых направляющих 2, соединенный с микрометрической винт-гайкой 3. Винт-гайка 3 сопрягается через подвижную муфту 4 с валом пьезопривода 5, включающего ротор 6, кольцевой пьезоэлемент 7, установленный на валу, и кольцевой пьезоэлемент 8, установленный на корпусе. На внешней цилиндрической стороне пьезоэлементов 7 и 8 закреплены металлические упругие толкатели 9, упирающиеся во внутреннюю часть ротора 6. Блок управления включает в себя генератор 10 формирования высокочастотных импульсов возбуждения пьезоэлементов, управляемый ключ 11, источник питания 12, блок 13 формирования частоты следования пачек импульсов возбуждения. Работает устройство следующим образом. Задатчиком высокочастотных микроперемещений в заявляемом устройстве выступает на базе пьезоэлемента, работающего по принципу обратного пьезоэлемента, пьезопривод ударного типа вращательного движения с кольцевым пьезоэлементом. В сочетании с микрометрическим винтом-гайкой величина микроперемещения таким приводом пропорциональна его угловому шагу. Угловой шаг такого пьезопривода пропорционален длительности пачки резонансных высокочастотных импульсов возбуждения пьезоэлемента. Угловой шаг может меняться в зависимости от длительности пачки от минимального (соответствующего одному высокочастотному импульсу возбуждения пьезоэлемента) до ¥-непрерывного вращения. Изменяя шаг путем изменения длительности пaчки возбуждения tn, тем самым можно менять величину единичного микроперемещения Dl от 0 до ¥. Скорость перемещения может определяться как частотой следования f сл пачек импульсов возбуждения, так и напряжением питания пьезопривода. Но именно режим регулирования частотой следования пачек позволяет обеспечить постоянство момента на валу пьезопривода и, тем самым, значительно снизить нижний предел диапазона регулирования скорости перемещений, т.е. практически свести его к нулю. Такая схема пьезопривода обладает улучшенными старт-стопными характеристиками за счет повышенного внутреннего момента самоторможения, что позволяет получить весьма малые микроперемещения и выбирать люфты в системе за счет фрикционной заторможенности вала. При наличии постоянного питающего напряжения на выходе блока 12 (эпюра A, фиг.2), например, напряжения питания Un = 27B, сигнал в такой форме не поступает на блок 10. Форму импульсов питания формирует ключ 11, который управляется блоком частоты 13, формирующем частоту импульсов управления fсл (эпюра Б). Длительность импульсов управления tn формируется в соответствии с частотой f сл. Сформированный сигнал управления (эпюра B) поступает на управляемый ключ 11, с выхода которого идут импульсы питания, соответствующие частоте и длительности импульсов управления (эпюра Г). В блоке 10 осуществляется преобразование импульсов питания в пачки импульсов возбуждения на резонансной частоте пьезоэлемента с напряжением возбуждения Uвозб и частотой f рез (эпюра Д). При наличии напряжения на пьезоэлементе 7 он возбуждается. Колебания от пьезоэлемента передаются в толкатели 9, которые отталкиваясь от фрикционно-заторможенного (толкателями нижнего пьезоэлемента) ротора, создают момент вращения валу. При изменении направления вращения подключается пьезоэлемент 8. При этом вращающий момент, сообщенный толкателями этого пьезоэлемента ротору 6, передается через фрикционный контакт верхнего пьезоэлемента и дальше в нагрузку. Шаг пьезопривода, или угол разворота Dj пропорционален длительности импульса управления tn (эпюра E). Угловое вращение микрометрическим винтом 3 преобразуется в поступательное движение, которое передается каретке 1. Таким образом, единичное микроперемещение каретки Dl (эпюра E) будет определяться шагом пьезопривода и передаточным отношением винт-гайки. Скорость перемещения при заданной микропередаче Dl будет определяться частотой следования импульсов управления. Использование предлагаемого устройства за счет одновременного формирования микропередач и их группировки позволило значительно улучшить характеристики существующего микроманипулятора. Так, достигнутый угловой шаг на пьезоприводе с диаметром пьезошайбы 20мм составляет ~30угл.сек, что в сочетании с микрометрической винт-гайкой с передаточным числом 1/500 позволяет реализовать микроперемещение ~0,01мкм, что при частоте f сл ~ 1Гц обеспечивает скорость микроперемещения ~0,01мкм/с.
ДивитисяДодаткова інформація
Автори англійськоюPetrenko Serhii Fedorovych
Автори російськоюПетренко Сергей Федорович
МПК / Мітки
МПК: G02B 21/32
Мітки: мікроманіпулятор
Код посилання
<a href="https://ua.patents.su/3-26075-mikromanipulyator.html" target="_blank" rel="follow" title="База патентів України">Мікроманіпулятор</a>
Перистальтичний мікронасос
Номер патенту: 3677
Опубліковано: 27.12.1994
Автори: Флоризяк Володимир Олександрович, Жукарєв Володимир Олександрович, Берсеньов Валерій Якович, Солодовник Микола Леонидович, Голов'яшин Юрій Володимирович, Абдулін Салєх Мустафієвич, Шишов Юрій Георгійович, Петренко Сергій Федорович
МПК: G01F 13/00
Мітки: перистальтичний, мікронасос
Формула / Реферат:
Перистальтический микронасос, содержащий роликовую головку, соединенную с приводом, подключенным к блоку управления, и источник питания, отличающийся тем, что привод выполнен пьезоэлектрическим в виде вала с ротором, связанным через толкатель с кольцевым пьезоэлементом, блок управления выполнен в виде генератора высокочастотных импульсов возбуждения пьезоэлемента, соединенного с управляемым ключом, вход которого соединен с выходом...
П’єзоелектричний двигун
Номер патенту: 849
Опубліковано: 15.12.1993
Автори: Голов'яшин Юрій Володимирович, Берсеньов Валерій Якович, Петренко Сергій Федорович, Шишов Юрій Георгійович
Мітки: п'єзоелектричний, двигун
Формула / Реферат:
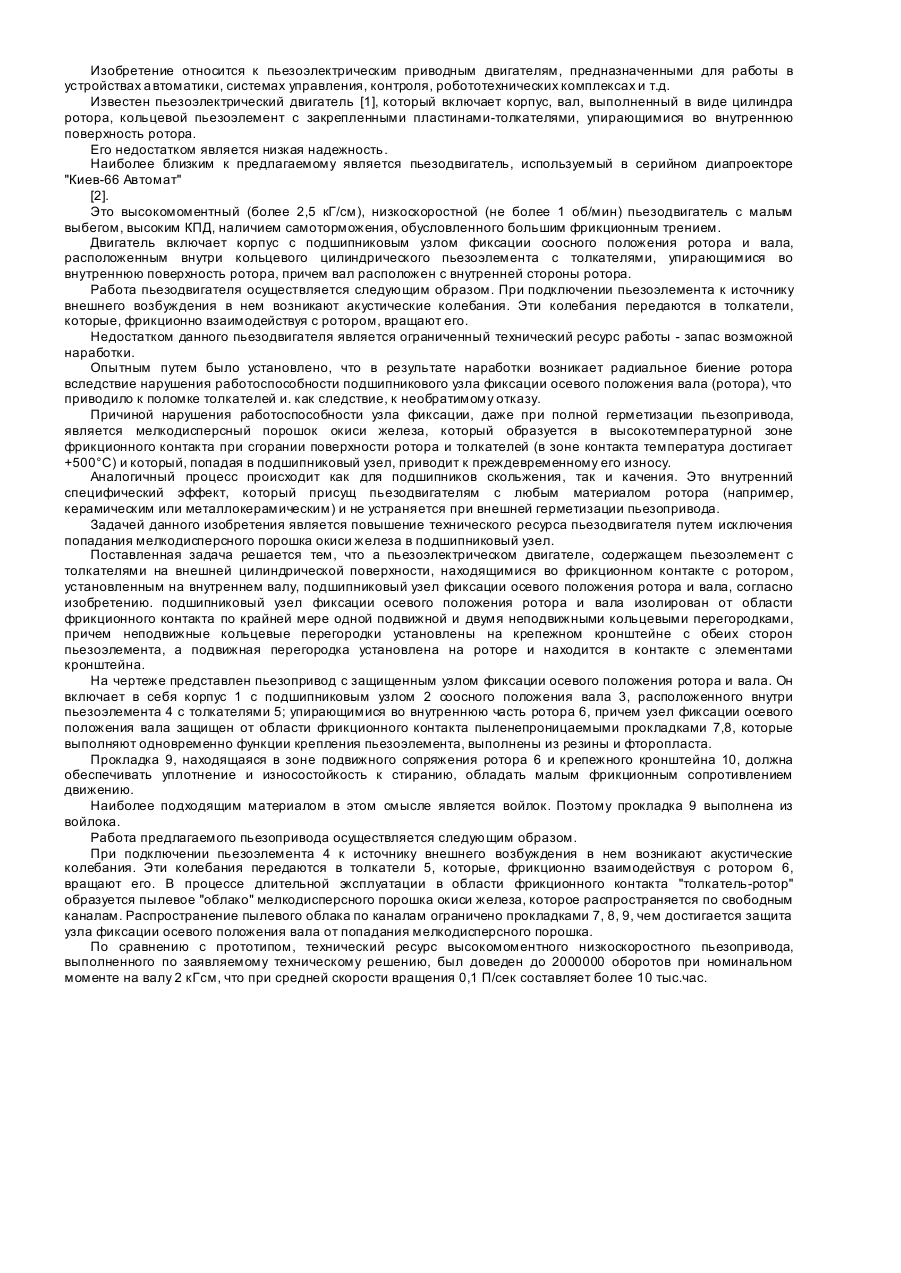
Пьезоэлектрический двигатель, содержащий пьезоэлемент с толкателями на внешней цилиндрической поверхности, находящимися во фрикционном контакте с ротором, установленным на внутреннем валу. подшипниковый узел фиксации осевого положения ротора и вала, отличающийся тем, что подшипниковый узел фиксации осевого положения ротора и вала изолирован от области фрикционного контакта по крайней мере одной подвижной и двумя неподвижными кольцевыми...
Пристрій для збудження ударних імпульсів
Номер патенту: 10599
Опубліковано: 25.12.1996
Автори: Личкатий Євген Олександрович, Божко Олександр Євгенович, Уманський Сергій Леонідович
МПК: G01M 7/08
Мітки: збудження, ударних, пристрій, імпульсів
Формула / Реферат:
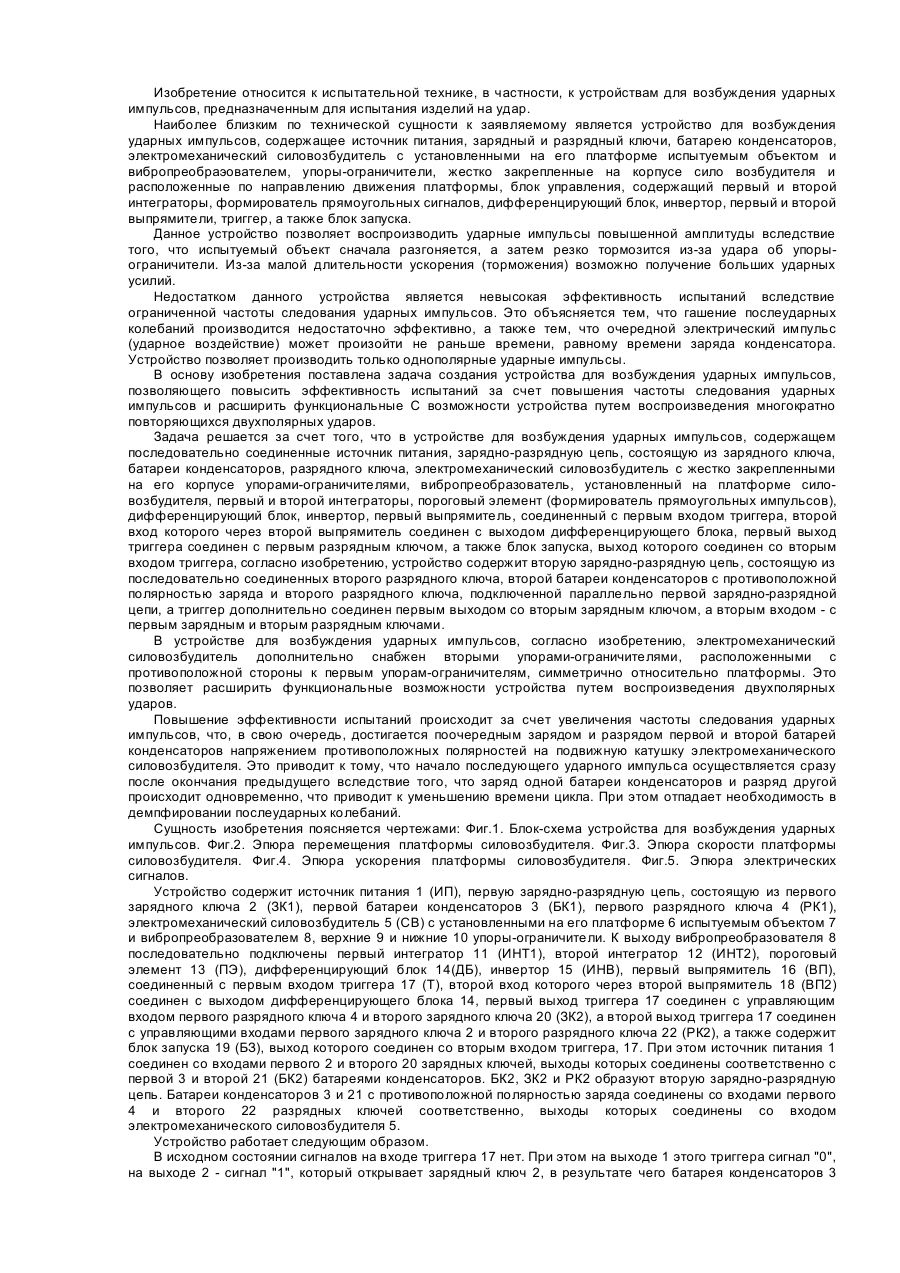
1. Устройство для возбуждения ударных импульсов, содержащее последовательно соединенные источник питания, первую зарядно-разрядную цепь, состоящую из последовательно соединенных зарядного ключа, батареи конденсаторов и разрядного ключа, электромеханический силовозбудитель с жестко закрепленными на его корпусе упорами-ограничителями, вибропреобразователь, установленный на платформе силовозбудителя, первый и второй интеграторы, пороговый...
Спосіб виготовлення фокусуючого перетворювача
Номер патенту: 19291
Опубліковано: 25.12.1997
Автор: Владіміров Сергій Альбертович
МПК: G01N 29/04
Мітки: спосіб, фокусуючого, виготовлення, перетворювача
Формула / Реферат:
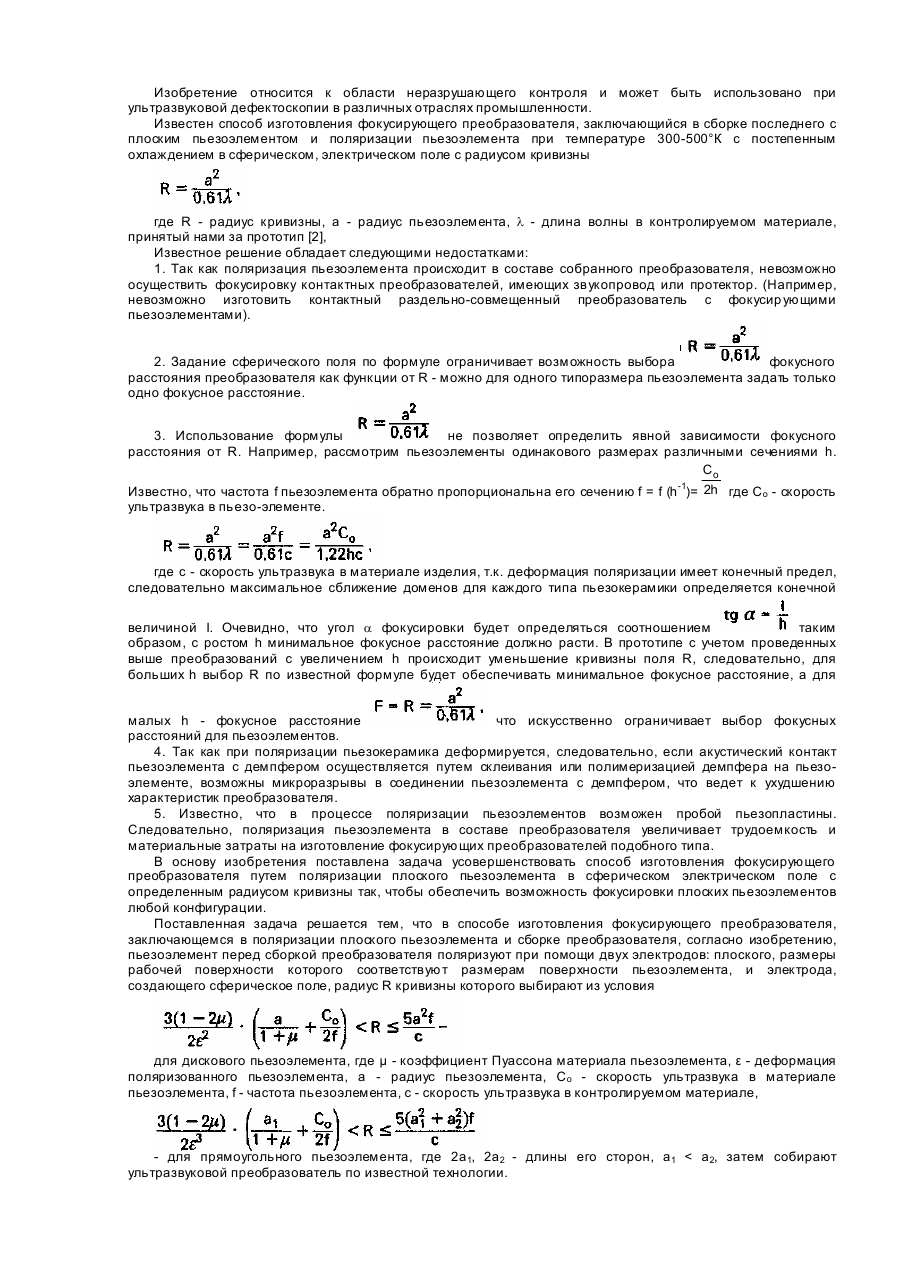
Способ изготовления фокусирующего преобразователя, заключающийся в поляризации плоского пьезоэлемента и сборке преобразователя, отличающийся тем, что пьезоэлемент поляризуют в сферическом электрическом поле перед сборкой преобразователя, для поляризации используют два различных электрода: плоский, размеры рабочей поверхности которого соответствуют размерам поверхности пьезо-элемента, и электрод, создающий сферическое поле, радиус R кривизны...
Пристрій для паяння складених п`єзокерамічних перетворювачів
Номер патенту: 23380
Опубліковано: 31.08.1998
Автори: Паеранд Юрій Едуардович, Гонтовий Сергій Вікторович
МПК: B23K 3/00
Мітки: паяння, пристрій, перетворювачів, п'єзокерамічних, складених
Формула / Реферат:
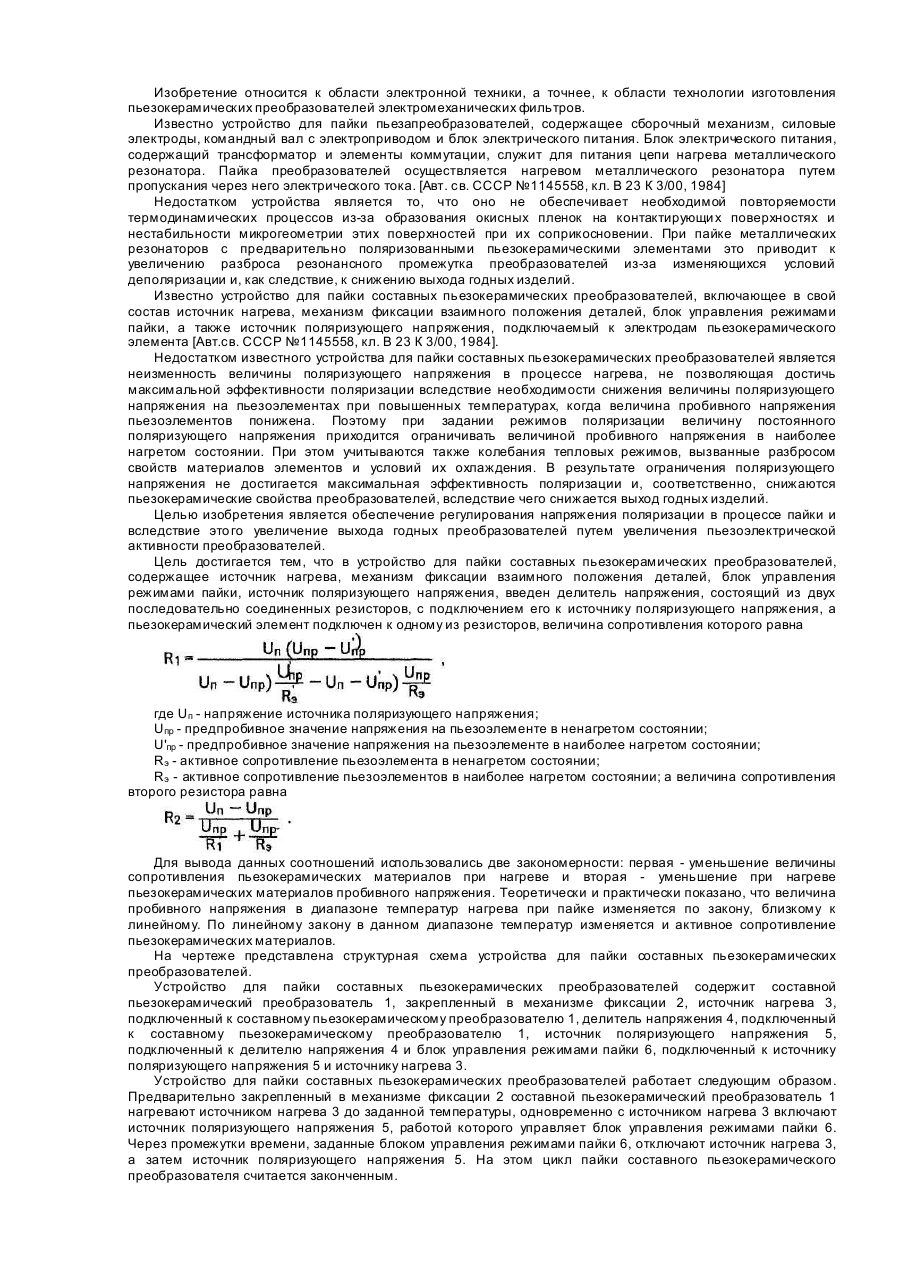
Устройство для пайки составных пьезокерамических преобразователей, содержащее источник нагрева, механизм фиксации взаимного положения деталей, блок управления режимами пайки, источник поляризующего напряжения, отличающееся тем, что в него введен делитель напряжения, состоящий из двух последовательно соединенных резисторов с подключением его к источнику поляризующего напряжения, а пьезокерамический элемент подключен к одному из резисторов,...
Попередній патент: Профілактичний біопрепарат субалін
Наступний патент: Теплообмінник
Випадковий патент: Компенсаційний акселерометр з оптичним датчиком кута