Багатоканальний пошуково-вимірювальний пеленгатор рухомих випромінюючих об’єктів
Номер патенту: 79311
Опубліковано: 11.06.2007
Автори: Чигирин Олег Трохимович, Остапов Анатолій Олександрович
Формула / Реферат
Багатоканальний пошуково-вимірювальний пеленгатор рухомих випромінюючих об'єктів, що складається із вимірювальної антени, приводу антени, пошукової антени, першого і другого приймачів, перемикача, подільника потужності, пристрою індикації, першого і другого блоків І, першого і другого блоків НІ, формувача сигналу помилки, датчика кута ![]() та датчика кута
та датчика кута![]() , формувача режиму роботи, формувача керуючих сигналів, у якому перший вхід вимірювальної антени з’єднаний з виходом приводу антени і першим входом пошукової антени, другий вхід вимірювальної антени з’єднаний з другим входом пошукової антени, перші виходи вимірювальної і пошукової антен підключені відповідно до першого і другого входів перемикача, третій і четвертий входи якого підключені відповідно до виходів першого блока НІ і до першого блока І, вихід перемикача підключений відповідно через подільник потужності та другий блок І до входу першого приймача і через подільник потужності та другий блок НІ до другого приймача, другий вихід пошукової антени підключений до першого входу формувача сигналу помилки, другий, третій входи якого підключені відповідно до виходів датчика кута
, формувача режиму роботи, формувача керуючих сигналів, у якому перший вхід вимірювальної антени з’єднаний з виходом приводу антени і першим входом пошукової антени, другий вхід вимірювальної антени з’єднаний з другим входом пошукової антени, перші виходи вимірювальної і пошукової антен підключені відповідно до першого і другого входів перемикача, третій і четвертий входи якого підключені відповідно до виходів першого блока НІ і до першого блока І, вихід перемикача підключений відповідно через подільник потужності та другий блок І до входу першого приймача і через подільник потужності та другий блок НІ до другого приймача, другий вихід пошукової антени підключений до першого входу формувача сигналу помилки, другий, третій входи якого підключені відповідно до виходів датчика кута ![]() та датчика кута
та датчика кута ![]() , вихід формувача режимів роботи підключений до перших входів першого блока НІ, першого блока І, виходи формувача керуючих сигналів з'єднані з відповідними входами вимірювальної і пошукової антен, датчика кута
, вихід формувача режимів роботи підключений до перших входів першого блока НІ, першого блока І, виходи формувача керуючих сигналів з'єднані з відповідними входами вимірювальної і пошукової антен, датчика кута ![]() та датчика кута
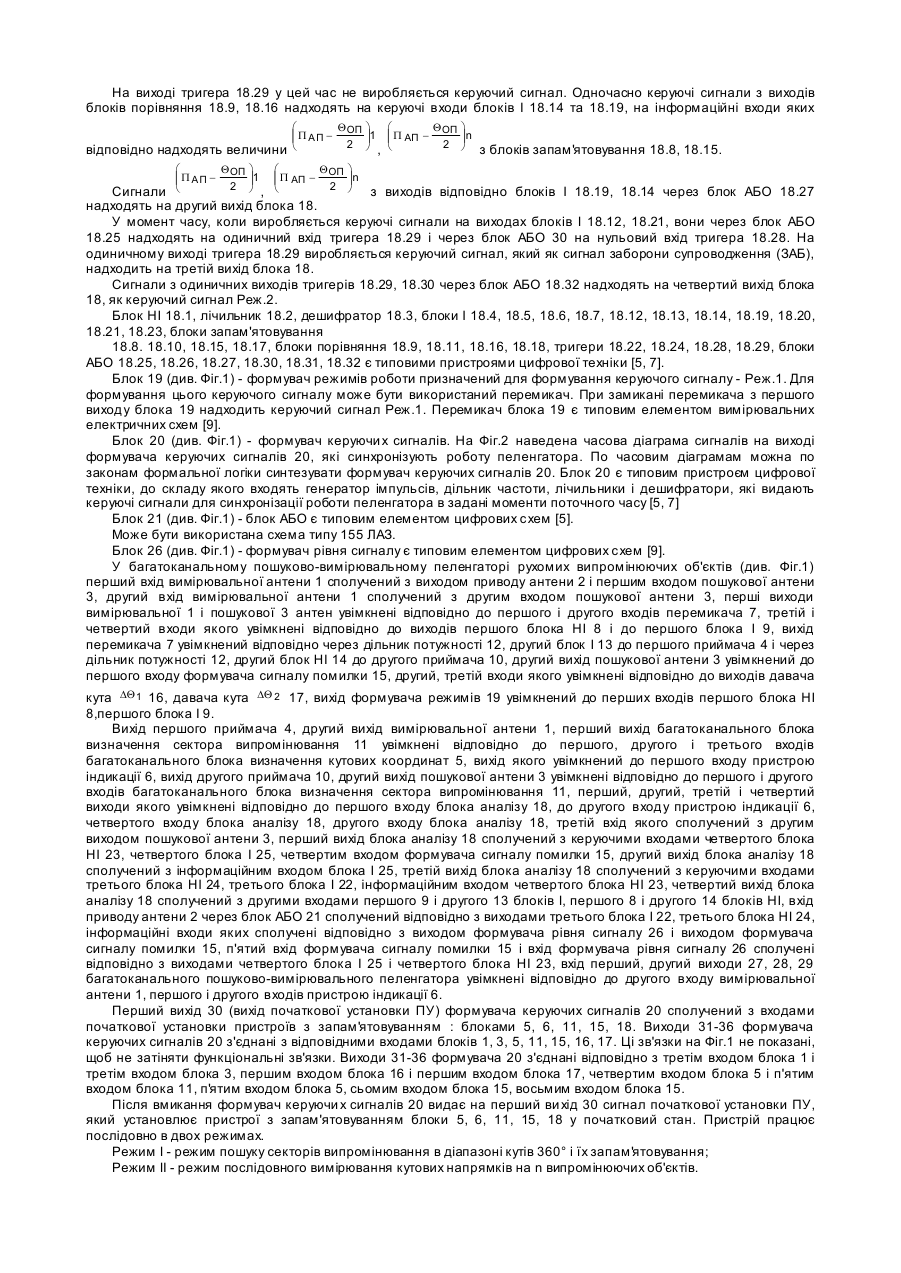
та датчика кута ![]() , формувача сигналу помилки, причому перший вхід, перший і другий виходи багатоканального пошуково-вимірювального пеленгатора рухомих випромінюючих об'єктів підключені відповідно до другого входу вимірювальної антени, першого і другого входів пристрою індикації, який відрізняється тим, що додатково містить багатоканальний блок визначення кутових координат, багатоканальний блок визначення сектора випромінювання, блок аналізу, формувач рівня сигналу, блок АБО, третій і четвертий блоки І, третій і четвертий блоки НІ, причому вихід першого приймача, другий вихід вимірювальної антени, перший вихід багатоканального блока визначення сектора випромінювання підключені відповідно до першого, другого і третього входів багатоканального блока визначення кутових координат, вихід якого підключений до першого входу пристрою індикації, вихід другого приймача, другий вихід пошукової антени, вихід блока АБО підключені відповідно до першого, другого і третього входів багатоканального блока визначення сектора випромінювання, перший, другий, третій і четвертий виходи якого підключені відповідно до першого входу блока аналізу, до другого входу пристрою індикації, четвертого входу блока аналізу, другого входу блока аналізу, третій вхід якого з’єднаний з другим виходом пошукової антени, перший вихід блока аналізу з’єднаний з керуючими входами четвертого блока НІ, четвертого блока І, четвертим входом формувача сигналу помилки, другий вихід блока аналізу з’єднаний з інформаційним входом четвертого блока І, третій вихід блока аналізу з’єднаний з інформаційним входом четвертого блока НІ, керуючими входами третього блока НІ, третього блока І, четвертий вихід блока аналізу з’єднаний з другими входами першого і другого блоків І, першого і другого блоків НІ, вхід приводу антени через блок АБО з’єднаний відповідно з виходами третього блока І, третього блока НІ, інформаційні входи яких з’єднані відповідно з виходом формувача рівня сигналу і виходом формувача сигналу помилки, п'ятий вхід формувача сигналу помилки і вхід формувача рівня сигналу з’єднані відповідно з виходами четвертого блока І та четвертого блока НІ, виходи формувача керуючих сигналів з’єднані з відповідними входами багатоканального блока визначення кутових координат, багатоканального блока визначення сектора випромінювання та блока аналізу.
, формувача сигналу помилки, причому перший вхід, перший і другий виходи багатоканального пошуково-вимірювального пеленгатора рухомих випромінюючих об'єктів підключені відповідно до другого входу вимірювальної антени, першого і другого входів пристрою індикації, який відрізняється тим, що додатково містить багатоканальний блок визначення кутових координат, багатоканальний блок визначення сектора випромінювання, блок аналізу, формувач рівня сигналу, блок АБО, третій і четвертий блоки І, третій і четвертий блоки НІ, причому вихід першого приймача, другий вихід вимірювальної антени, перший вихід багатоканального блока визначення сектора випромінювання підключені відповідно до першого, другого і третього входів багатоканального блока визначення кутових координат, вихід якого підключений до першого входу пристрою індикації, вихід другого приймача, другий вихід пошукової антени, вихід блока АБО підключені відповідно до першого, другого і третього входів багатоканального блока визначення сектора випромінювання, перший, другий, третій і четвертий виходи якого підключені відповідно до першого входу блока аналізу, до другого входу пристрою індикації, четвертого входу блока аналізу, другого входу блока аналізу, третій вхід якого з’єднаний з другим виходом пошукової антени, перший вихід блока аналізу з’єднаний з керуючими входами четвертого блока НІ, четвертого блока І, четвертим входом формувача сигналу помилки, другий вихід блока аналізу з’єднаний з інформаційним входом четвертого блока І, третій вихід блока аналізу з’єднаний з інформаційним входом четвертого блока НІ, керуючими входами третього блока НІ, третього блока І, четвертий вихід блока аналізу з’єднаний з другими входами першого і другого блоків І, першого і другого блоків НІ, вхід приводу антени через блок АБО з’єднаний відповідно з виходами третього блока І, третього блока НІ, інформаційні входи яких з’єднані відповідно з виходом формувача рівня сигналу і виходом формувача сигналу помилки, п'ятий вхід формувача сигналу помилки і вхід формувача рівня сигналу з’єднані відповідно з виходами четвертого блока І та четвертого блока НІ, виходи формувача керуючих сигналів з’єднані з відповідними входами багатоканального блока визначення кутових координат, багатоканального блока визначення сектора випромінювання та блока аналізу.
Текст
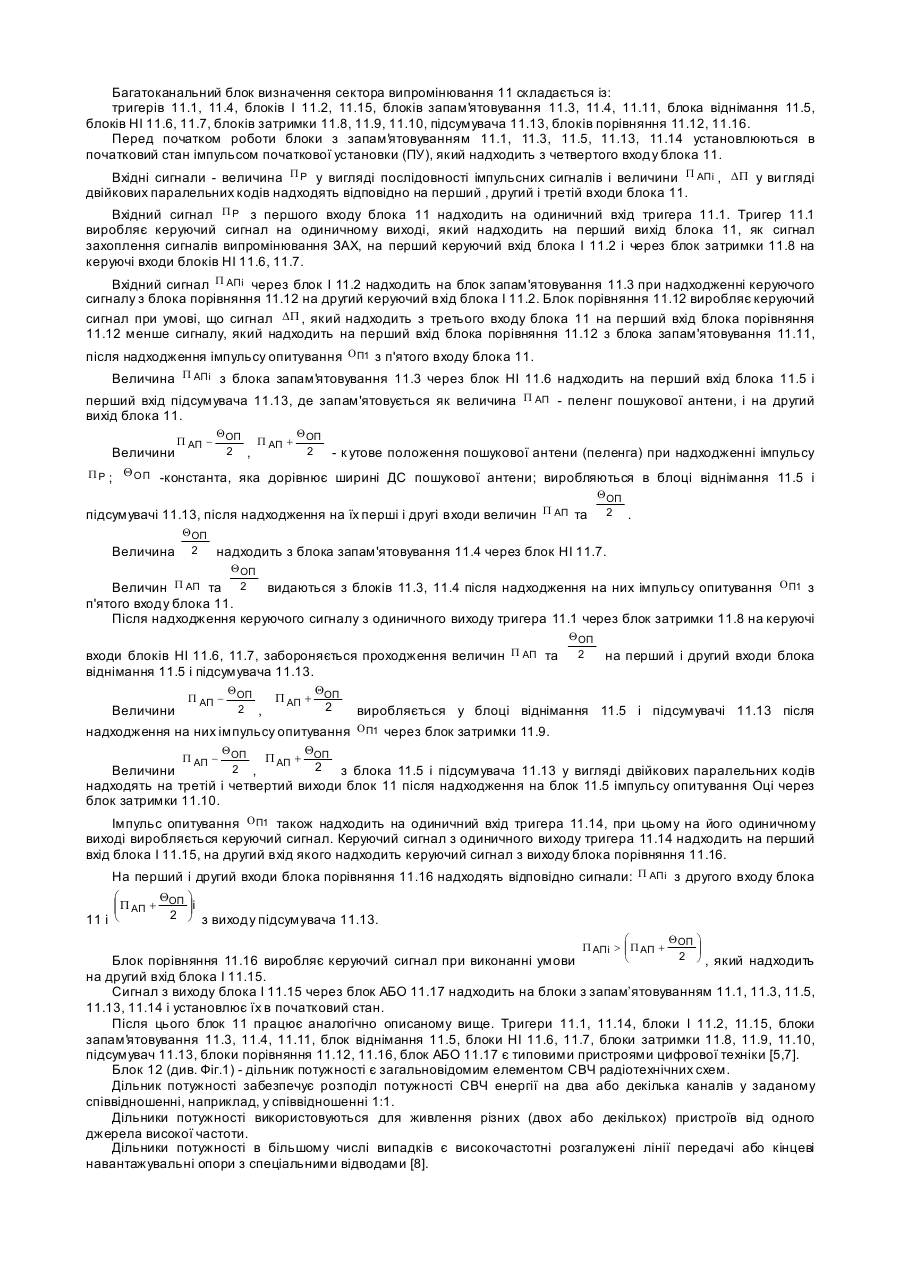
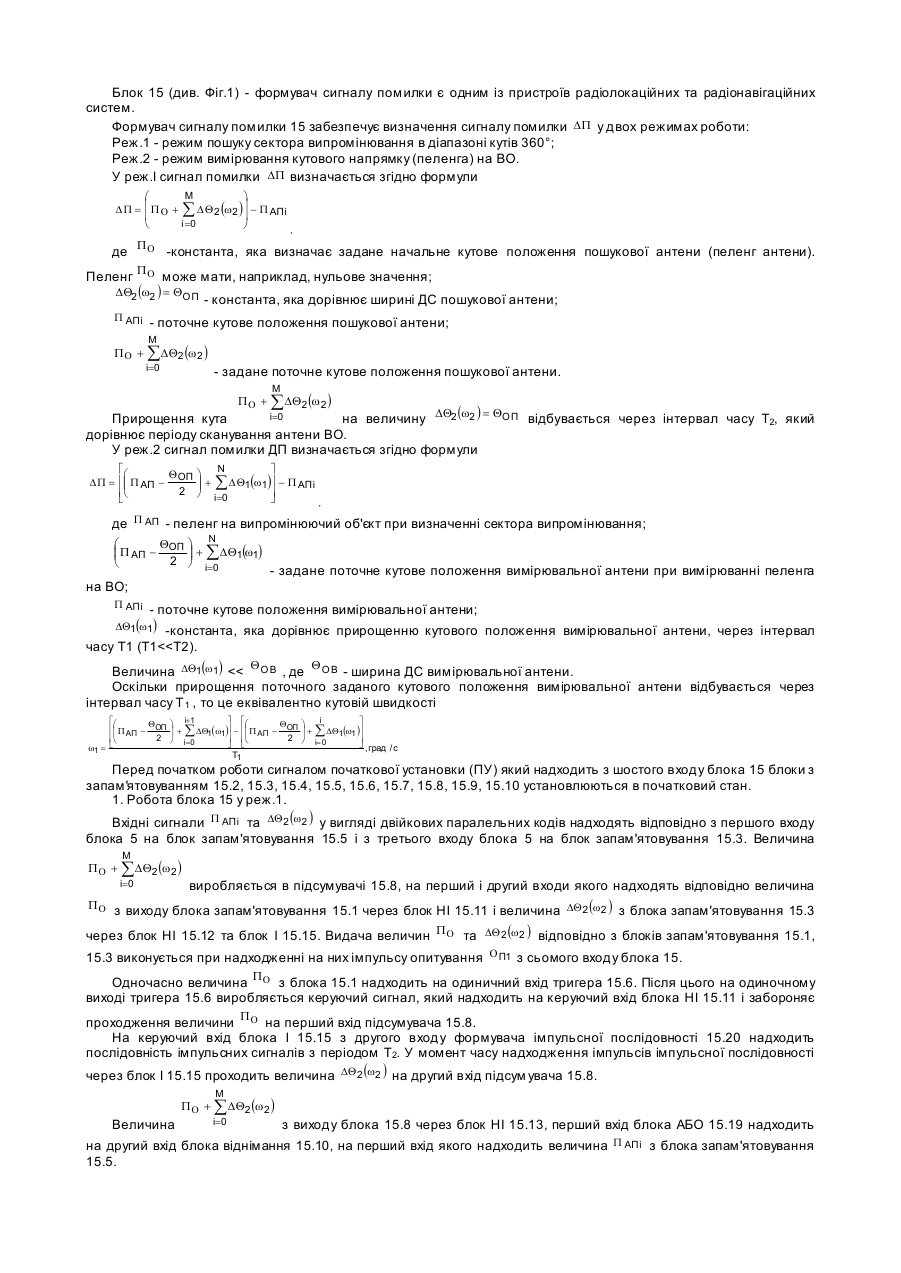
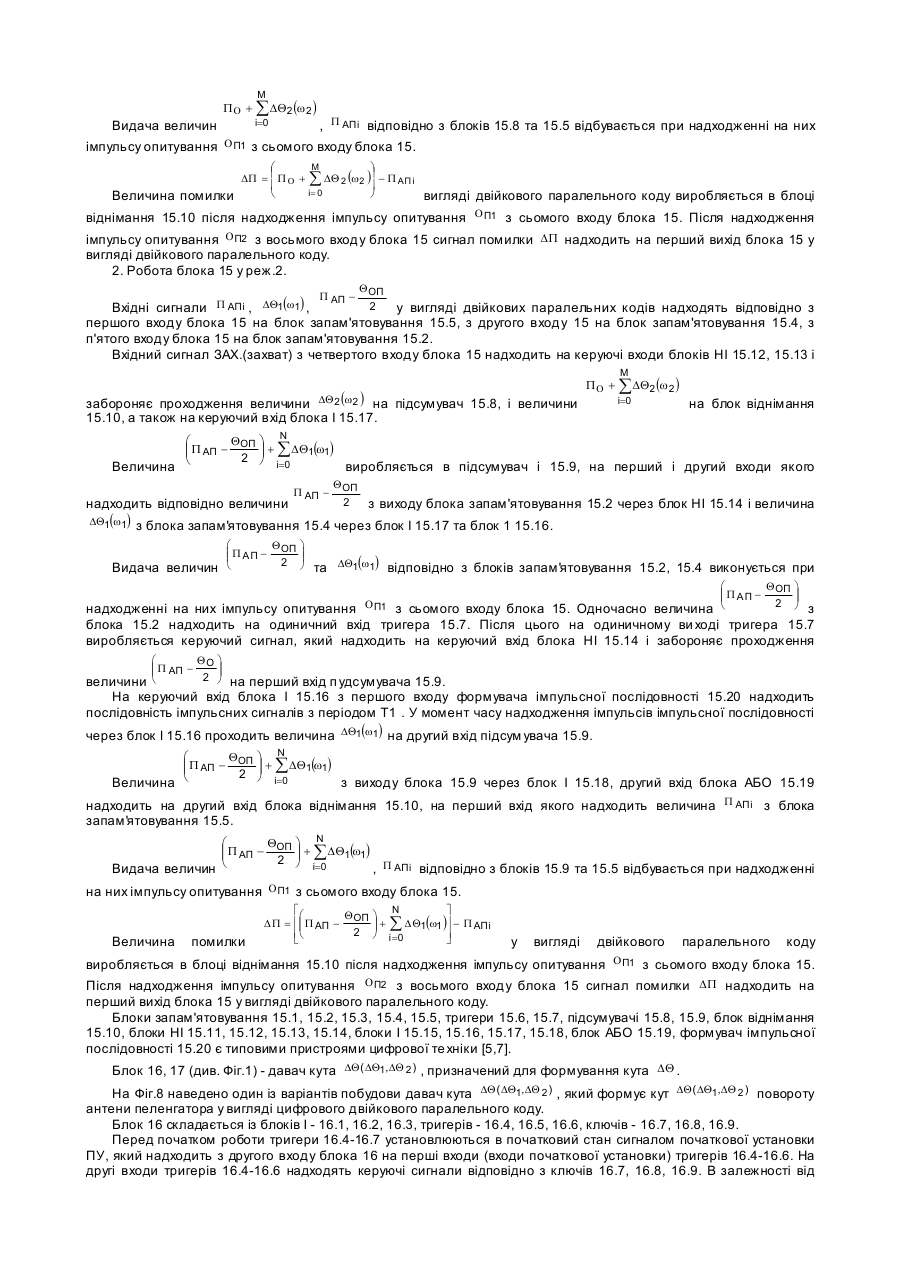
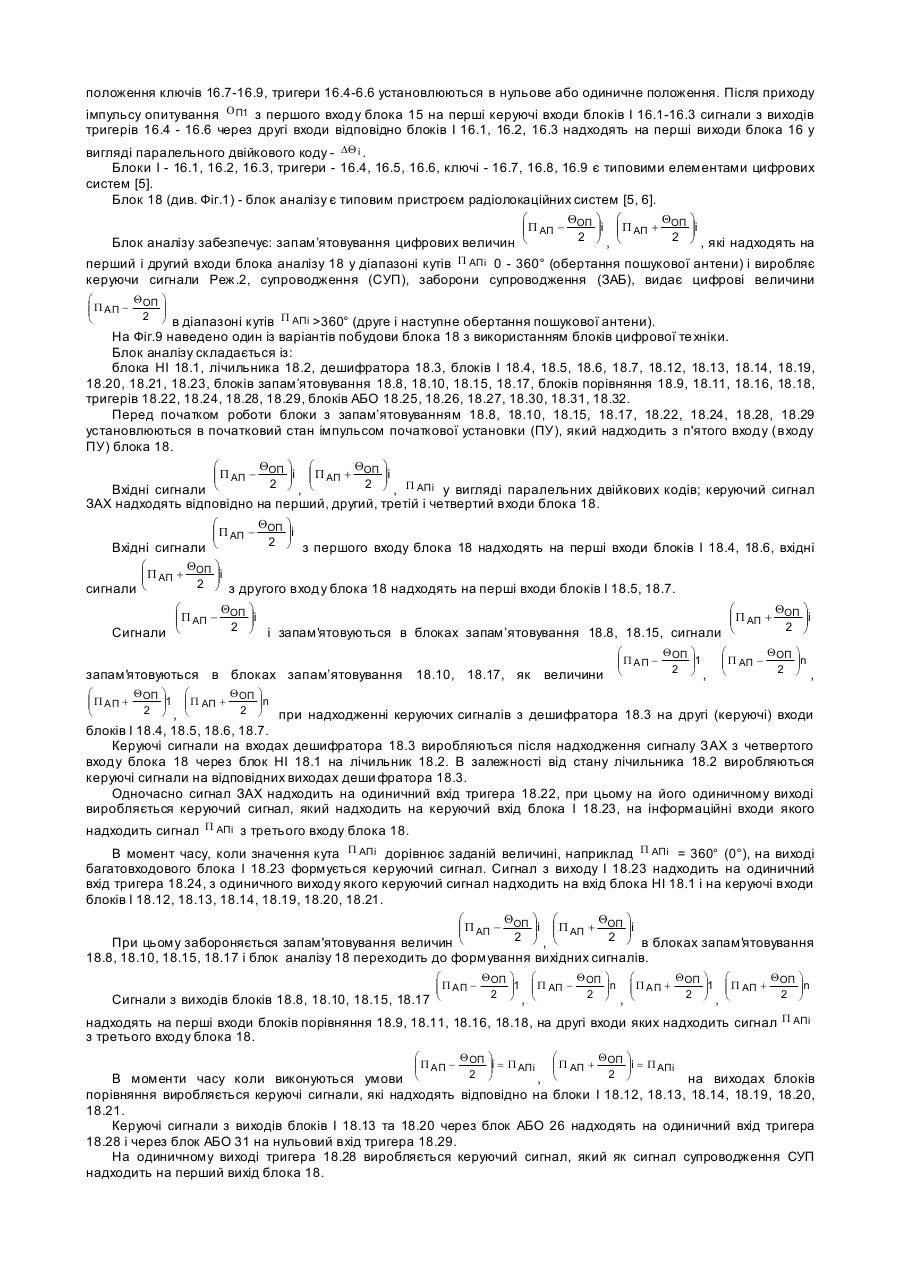
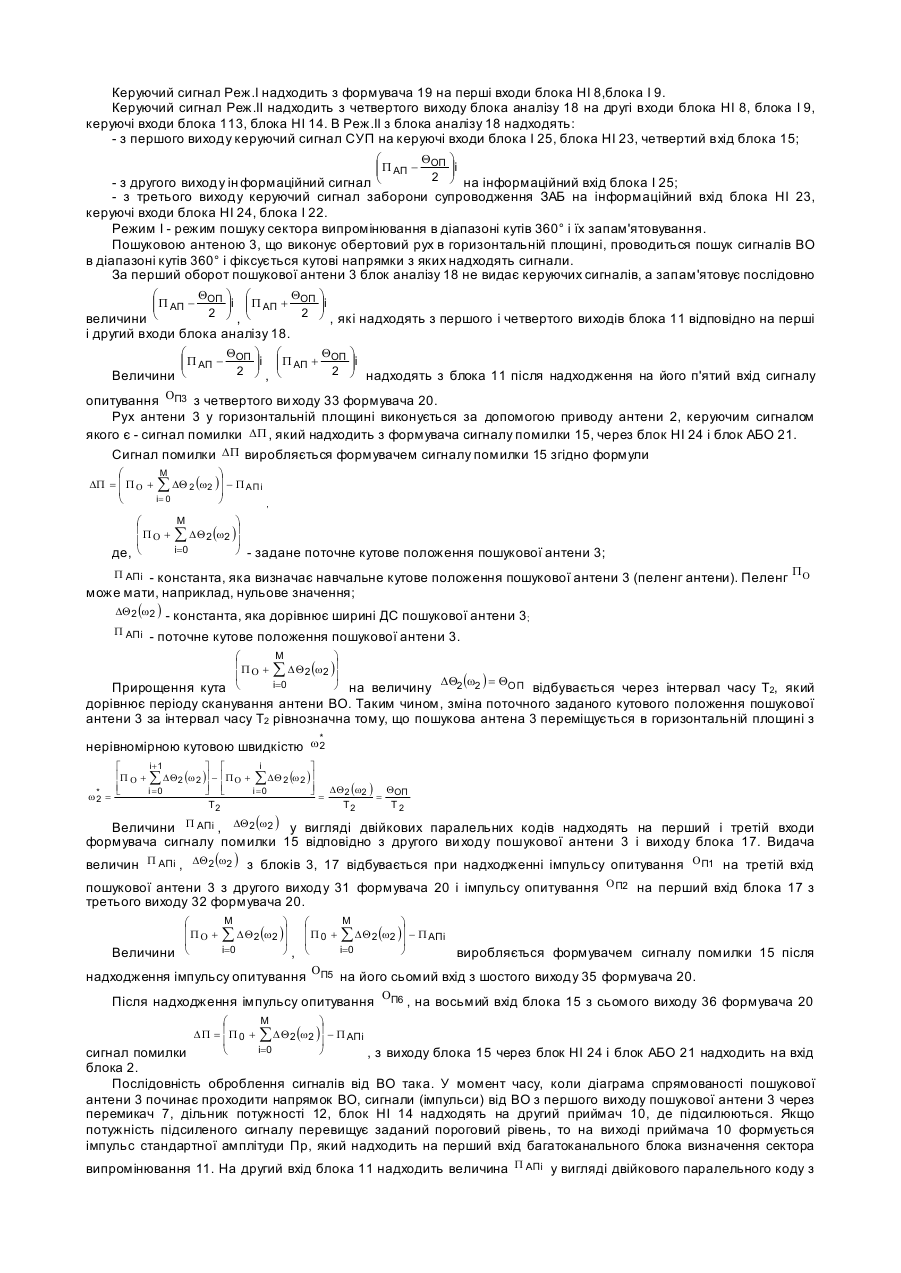
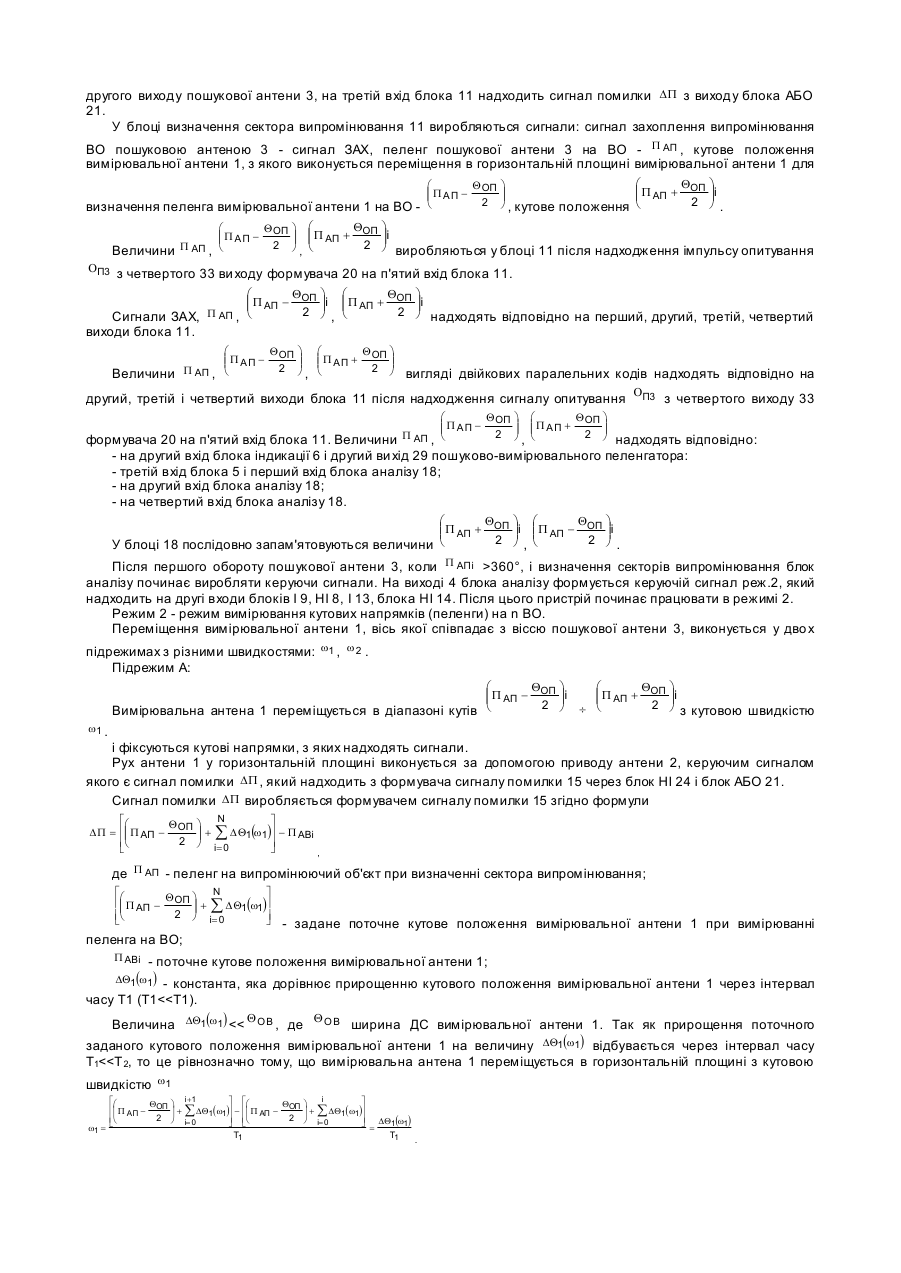
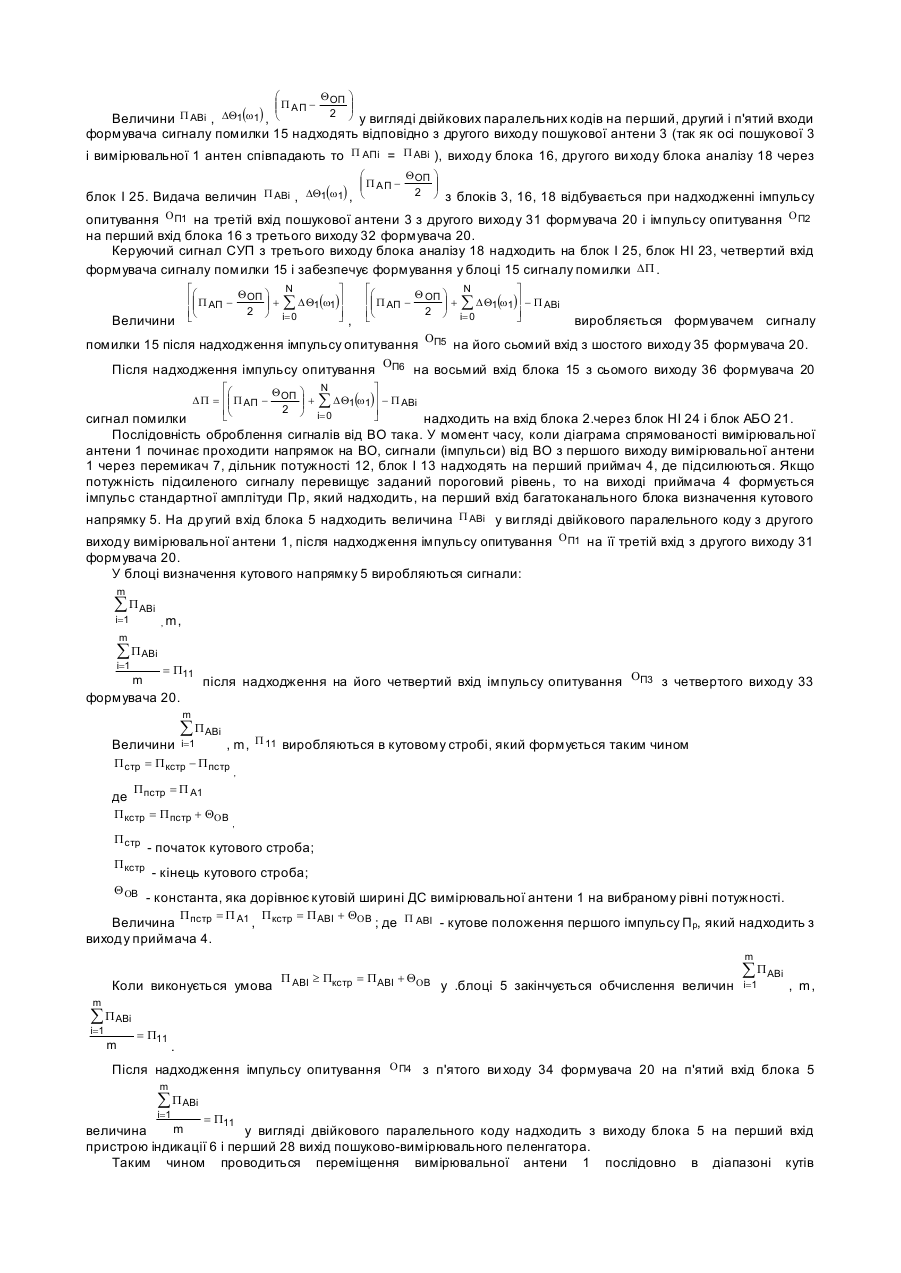
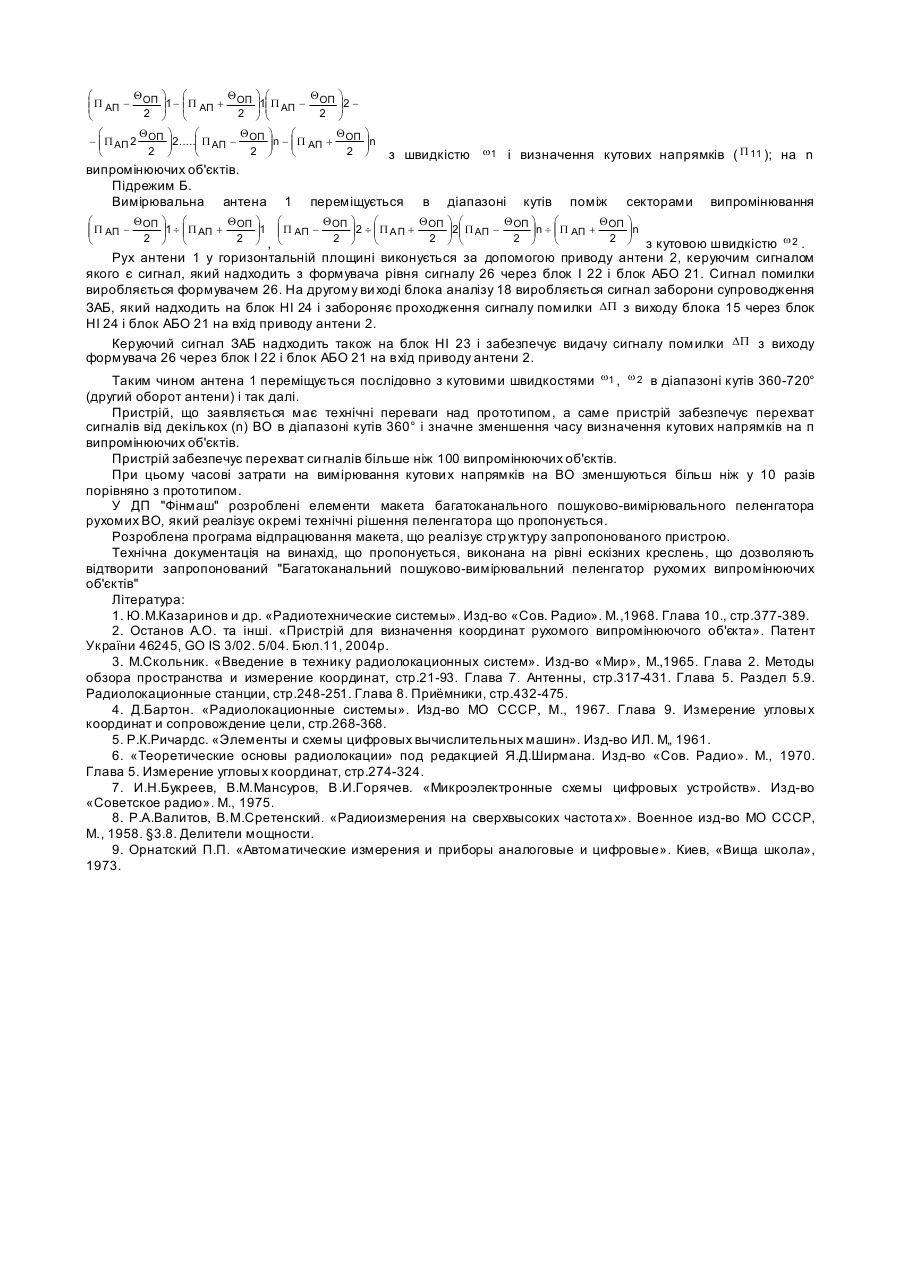
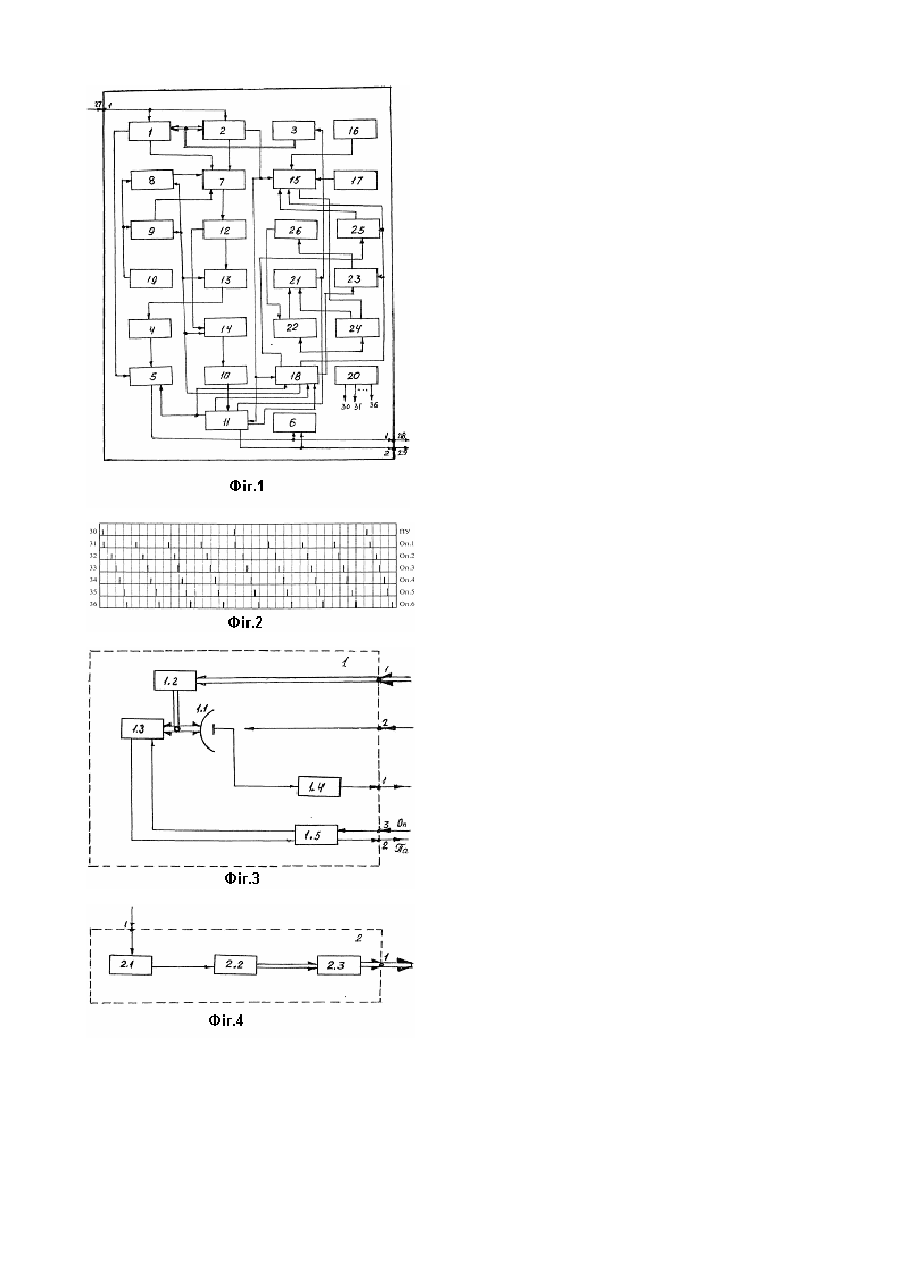
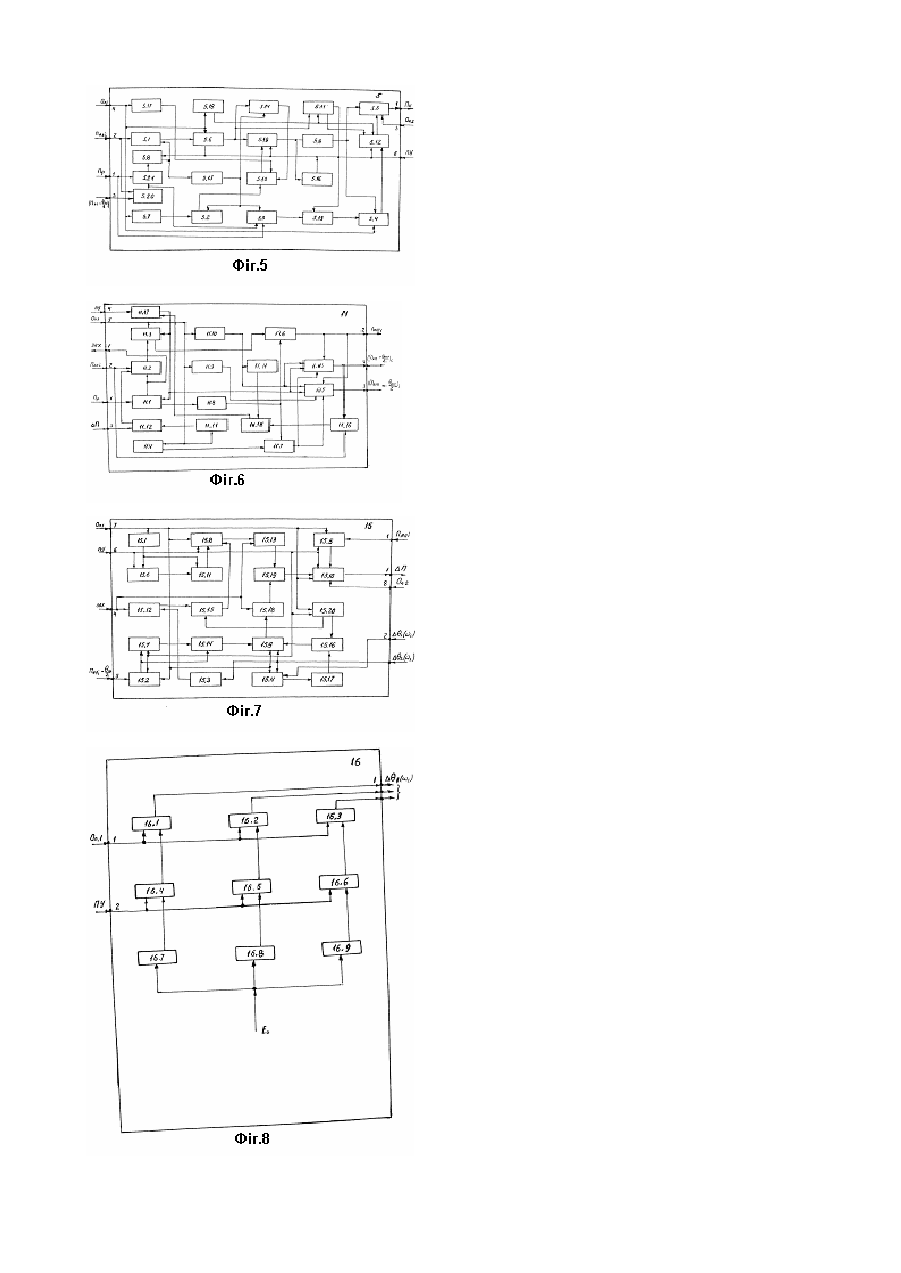
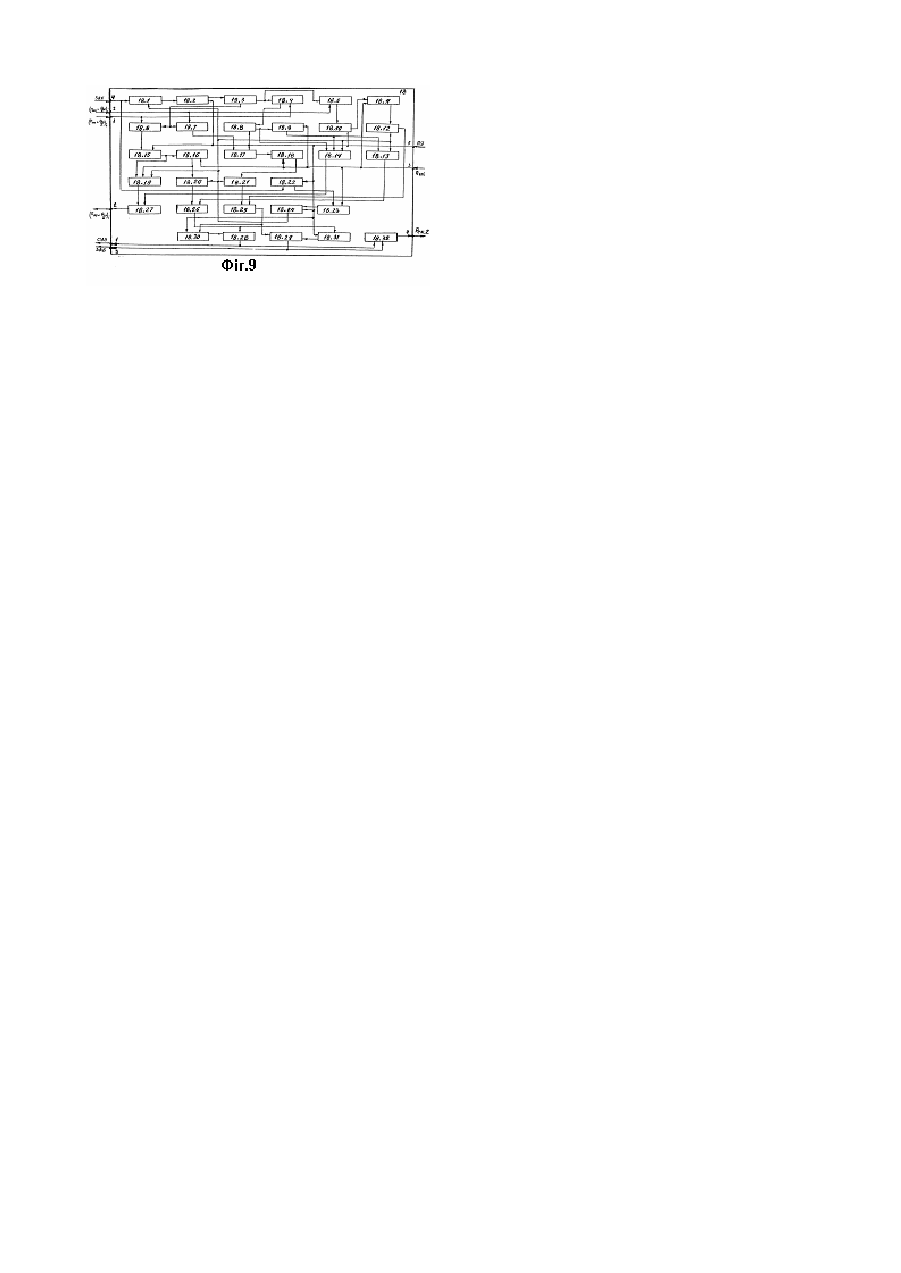
Пристрій, що пропонується, належить до галузі радіолокаційних і радіонавігаційних вимірювань і може бути використаний при створені пеленгаторів рухомих випромінюючих об'єктів (ВО). Пеленгатори належать до систем, які забезпечують прийом випромінювань від випромінюючих радіоелектронних засобів (РЕЗ) [1]. Ефективність роботи таких систем оцінюється часом перехвату випромінювань у діапазоні кутів 360° і точністю визначення кутового напрямку (пеленга) на ВО. В УКВ, дециметровому, сантиметровому діапазонах пеленгування випромінювань ВО (РЛС) ускладнюється тим, що в цих діапазонах використовуються вузькі діаграми спрямованості (ДС) антен ВО (РЛС) ( QВО =1-4°, де QВО - ширина ДС антен ВО). Тому кутова швидкість пошуку напрямку на ВО (кутова швидкість w обертання ДС антен пеленгаторів) повинна бути узгоджена з передбаченою кутовою швидкістю обертання антени ВО (РЛС). Особливо утр уднено визначення пеленга на працюючу в режимі кругового обертання РЛС. Якщо приймач пеленгатора настроєно на частоту РЛС і потрібно визначити тільки пеленг РЛС, то необхідно, щоб за час одного обертання антени РЛС, ДС антени пеленгатора повернулась на кут, який не перевищує Q 0 , де Q 0 - ширина ДС пеленгатора [1]. За аналоги вибираються: Пристрій, який забезпечує реалізацію умов, наведених у [1], складається з антени, приводу антени, приймача, блока визначення кутових координат, пристрою індикації. Апаратура веденого приймального пункту "Пристрою для визначення координат рухомого випромінюючого об'єкта" [2]. Пристрій складається з антени, приводу антени, давача сканування антени, приймача, блока визначення кутових координат, пристрою індикації, блока запам'ятовування, формувача керуючих сигналів. Недоліком аналогів є великі часові затрати на перехват сигналів ВО в діапазоні кутів 360° (6-60 хвилин), також не забезпечується перехват сигналів від декількох ВО в діапазоні кутів 360° і визначення кутових напрямків на них. За прототип вибирається: пошуково-вимірювальний загоризонтний пеленгатор рухомих ВО, що складається з вимірювальної антени, приводу антени, пошукової антени, першого приймача, блока визначення кутових координат, пристрою індикації, перемикача, двох блоків НІ, дво х блоків І, другого приймача, блока визначення сектора випромінювання, дільника потужності, формувача сигналу помилки, давачів кута DQ1 , DQ 2 ,тригера, формувача режимів, формувача керуючих сигналів, у якому перший вхід вимірювальної антени сполучений з виходом приводу антени і' першим входом пошукової антени, другий вхід вимірювальної антени сполучений з другим входом пошукової антени, перші виходи вимірювальної і пошукової антен увімкнені відповідно до першого і другого входів перемикача, третій і четвертий входи якого увімкнені відповідно до виходів першого блока НІ і до першого блока I, вихід перемикача увімкнений відповідно через дільник потужності, другий блок І, перший приймач до першого входу блока визначення кутових координат і через дільник потужності, другий блок НІ, другий приймач до першого входу блока визначення сектора випромінювання, другий вихід вимірювальної антени сполучений з другим входом блока визначення кутових координат, вихід якого увімкнений до першого входу пристрою індикації, другий вихід пошукової антени увімкнений до другого входу блока визначення сектора випромінювання і першого входу формувача сигналу помилки, вихід, другий, третій, четвертий, п'ятий входи якого увімкнені відповідно до входу приводу антени, виходу давача кута DQ1 , давача кута DQ 2 , одиничного виходу тригера, першого виходу блока визначення сектора випромінювання, другий і третій виходи якого увімкнені відповідно до другого входу пристрою індикації і до одиничного входу тригера, одиничний вихід якого з'єднаний з керуючими входами першого, другого блоків НІ, першого, другого блоків 1, вихід формувача режимів увімкнений до перших входів першого блока НІ, першого блока І, виходи формувача керуючих сигналів з'єднані з відповідними входами вимірювальної і пошукової антен, блока визначення кутових координат, блока визначення сектора випромінювання, формувача сигналу помилки, давачів кутів DQ1 , DQ 2 , вхід, перший, др угий ви ходи пошуково-вимірювального пеленгатора увімкнені відповідно до другого входу вимірювальної антени, першого і другого входів пристрою індикації. Прототип забезпечує значне зменшення часу перехвата ТПЕР сигналів від ВО в діапазоні кутів 360°, більш ніж у 10 разів порівняно з аналогами. Недоліком прототипу є те, що він не забезпечує перехват сигналів від декількох ВО в діапазоні кутів 360° і визначення кутових напрямків на ці ВО. Метою винаходу, що пропонується, є забезпечення перехвату сигналів від декількох (n) ВО в діапазоні кутів 360° і зменшення часу визначення кутових напрямків на n випромінюючих об'єктів. Поставлена мета досягається тим, що в багатоканальний пошуково-вимірювальний пеленгатор рухомих випромінюючих об'єктів, що складається з вимірювальної і пошукової антен, приводу антени, першого і другого приймачів, пристрою індикації, перемикача, двох блоків НІ, двох блоків І, дільника потужності, формувача сигналу помилки, давачів кутів DQ1 , DQ 2 , формувача режимів, формувача керуючих сигналів, у якому перший вхід вимірювальної антени сполучений з виходом приводу антени і першим входом пошукової антени, другий вхід вимірювальної антени сполучений з другим входом пошукової антени, перші виходи вимірювальної і пошукової антен увімкнені відповідно до першого і другого входів перемикача, третій і четвертий входи якого увімкнені відповідно до виходів першого блока НІ і до першого блока І, вихід перемикача увімкнений відповідно через дільник потужності, другий блок І до першого приймача і через дільник потужності, другий блок НІ до другого приймача, другий вихід пошукової антени увімкнений до першого входу формувача сигналу помилки, другий, третій входи якого увімкнені відповідно до виходів давача кута DQ1 , давача кута DQ 2 , ви хід формувача режимів увімкнений до перших входів першого блока НІ, першого блока І, виходи формувача керуючих сигналів з'єднані з відповідними входами вимірювальної і пошукової антен, формувача сигналу помилки, давачів кутів DQ1 , DQ 2 , вхід, перший, другий ви ходи пошуково-вимірювального пеленгатора увімкнені відповідно до другого входу вимірювальної антени, першого і другого входів пристрою індикації, який відрізняється тим, що введені багатоканальний блок визначення кутови х координат, багатоканальний блок визначення сектора випромінювання, формувач рівня сигналу, третій і четвертий блоки НІ, третій і четвертий блоки І, блок АБО, блок аналізу, в якому вихід першого приймача, другий вхід вимірювальної антени, перший вихід багатоканального блока визначення сектора випромінювання увімкнені відповідно до першого, другого і третього входів багатоканального блока визначення кутови х координат, вихід якого увімкнений до першого входу пристрою індикації, вихід др угого приймача, другий вихід пошукової антени, вхід приводу антени увімкнені відповідно до першого, другого і третього входів багатоканального блока визначення сектора випромінювання, перший, другий, третій і четвертий виходи якого увімкнені відповідно до першого входу блока аналізу, до другого входу пристрою індикації, четвертого входу блока аналізу, друго го входу блока аналізу, третій вхід якого сполучений з другим виходом пошукової антени, перший вихід блока аналізу сполучений з керуючими входами четвертого блока НІ, і четвертого блока І, четвертим входом формувача сигналу помилки, другий вихід блока аналізу сполучений з інформаційним входом четвертого блока І, третій вихід блока аналізу сполучений з інформаційним входом четвертого блока НІ, з керуючими входами третього блока НІ, третього блока І, четвертий вихід блока аналізу сполучений з другими входами першого і другого блоків І, першого і другого блоків НІ, вхід приводу антени через блок АБО сполучений відповідно з виходами третього блока І і третього блока НІ, інформаційні входи яких сполучені відповідно з виходом формувача рівня сигналу і виходом формувача сигналу помилки, п'ятий вхід формувача сигналу помилки і вхід формувача рівня сигналу, сполучені відповідно з виходами четвертого блока І і четвертого блока НІ, виходи формувача керуючих сигналів увімкнені до відповідних входів багатоканального блока визначення кутових координат і багатоканального блока визначення сектора випромінювання. Перехват сигналів випромінювання від декількох (n) випромінюючих об'єктів в діапазоні кутів 360° і значне зменшення часу визначення кутових напрямків на ці ВО забезпечується за рахунок: послідовного пошуку секторів випромінювання в діапазоні кутів 360° і запам'ятовуванням кутови х напрямків цих секторів; вимірювання послідовно кутових напрямків на n випромінюючих об'єктів при наведені вимірювальної антени на попередньо визначені кутові напрямки секторів випромінювання. Використання наведених відмітних ознак зі зв'язками між ними не відомо, тому відповідає критерію "новизна". Забезпечення запропонованого пристрою новою сукупністю ознак для виконання поставленої задачі дозволяє стверджувати, що запропонований пристрій відповідає умовам патентоздатності, так як він є новим, має винахідницький рівень та промислове застосування. Сутність винаходу пояснюється кресленнями, де: на Фіг.1 наведена блок-схема багатоканального пошуково-вимірювального пеленгатора рухомих ВО; на Фіг.2 наведена часова діаграма робота формувача керуючих сигналів; на Фіг.3 наведена блок-схема антени 1; на Фіг.4 наведена блок-схема приводу антени 2; на Фіг.5 наведена блок-схема багатоканального блока визначення кутових координат 5; на Фіг.6 наведена блок-схема багатоканального блока визначення сектора випромінювання 11; на Фіг.7 наведена блок-схема формувача сигналу помилки 15; на Фіг 8 наведена блок-схема давача кута DQ1 16; на Фіг.9 наведена блок-схема блока аналізу 18. Пошуково-вимірювальний пеленгатор рухомих ВО, що пропонується, складається (див. Фіг.1) з вимірювальної антени 1, приводу антени 2, пошукової антени 3, першого приймача 4, багатоканального блока визначення кутових координат 5, пристрою індикації 6, перемикача 7, блоків НІ 8, 14, 24, 23, блоків 19, 13, 22, 25, другого приймача 10, багатоканального блока визначення сектора випромінювання 11, дільника потужності 12, формувача сигналу помилки 15, давачів кута DQ1 , DQ2 16,17, блока аналізу 18, формувача режимів 19, формувача керуючих сигналів 20, блока АБО 21, формувача рівня сигналів. Формувач керуючих си гналів 20 має 7 виходів: 30-36. Зв'язки формувача керуючих сигналів 20 з блоками багатоканального пошуково-вимірювального пеленгатора на Фіг.1 не показані для наглядности креслень. Багатоканальний пошуково-вимірювальний пеленгатор має один вхід 27 і два ви ходи 28, 29. Блок 1, 3 (див. Фіг.1) - антена є загальновідомим типовим пристроєм радіолокаційних систем [3]. Антена 1, 3 забезпечує приймання електромагнітної енергії від ВО і передачу її на вхід приймача через антенно-фідерний тракт, переміщення діаграми спрямованості (ДС) антени в площині сканування та вимірювання кутового напрямку на ВО. Характеристики антени забезпечують вимірювання кутового напрямку з необхідною точністю. В залежності від призначення системи і частотного діапазону застосовуються антени різних типів: вібраторні, параболічні, рупорні й інші [3]. Переміщення ДС антени виконується за допомогою електромеханічних чи електронних пристроїв. Антена 1, 3 установлюється на дво- чи- трикоординатних поворотних колонках, які керують рухом антен по сигналах від систем стеження. На Фіг.3 наведено один із варіантів антени 1 з механічним скануванням ДС антени в одній площині. Антена 1 складається із антенного дзеркала 1.1, редуктора 1.2, давача кута 1.3, першого обертового контактного пристрою 1.4, другого обертового контактного пристрою 1.5. Блоки 1.1, 1.2, 1.3, 1.4, 1.5 розміщуються на антенній колонці, яка на Фіг.3 не показана. СВЧ сигнал при опромінюванні антенного дзеркала 1.1 передається через блок 1.4 на перший вихід блока 1. Обертання (сканування) антенного дзеркала 1.1 виконується при допомозі електромеханічного зв'язку з входу 1 через редуктор 1.2. При цьому одночасно з антенним дзеркалом 1.1 за допомогою редуктора 1.2 обертається давач кута 1.3. На виході давача кута 1.3 виробляється код кутового положення антени ПА на момент часу, коли імпульс опитування ОП з третього входу блока 1 через блок 1.5 поступає на вхід опитування давача кута 1.3. Код ПА з інформаційного виходу давача к ута 1.3 через блок 1.5 поступає на другий вихід блока 1. Блок 2 (див. Фіг.1) - привід антени є типовим пристроєм системи стеження [3, 4]. На Фіг.4 наведено один із варіантів побудови приводу антени 2. Блок 2 складається із підсилювача потужності 2.1, двигуна 2.2, редуктора 2.3. Вхідний сигнал поступає на вхід блока 2, підсилюється в підсилювачі потужності 2.1 і поступає на керівний вхід двигуна 2.2. В залежності від знака сигналу визначається напрямок обертання двигуна 2.2. Обертання двигуна 2.2 через редуктор 2.3 передається на вихід блока 2 у вигляді електромеханічного зв'язку. При зміні знака вхідного .сигналу на вході блока 2 змінюється напрямок обертання двигуна 2.2, який передається на вихід блока 2. Підсилювач потужності 2.1, двигун 2.2, редуктор 2.3 є типовими пристроями електромеханічних систем стеження. Блок 4, 10 (див. Фіг.1) - приймач є загальновідомим типовим пристроєм радіолокаційних та радіонавігаційних систем [3]. Приймач призначений для виділення та підсилення СВЧ сигналів, що поступають із антени. У радіолокаційних та радіонавігаційних станціях застосовуються приймачі різних типів, у тому числі супергетеродинні, детекторні, з підсиленням на відео частоті та ін. Найбільш розповсюдженими є супергетеродинні приймачі завдяки їх високій чутливості. Блок 5 (див. Фіг.1) - блок визначення кутових координат є типовим пристроєм радіолокаційних та радіонавігаційних систем [3, 4]. Блок визначення кутових координат 5 забезпечує для вибраного методу пеленгування визначення кутового напрямку на ВО за одне проходження діаграми спрямованості антени 1 напрямку на ВО методом аналізу обвідної діаграми спрямованості антени по формулі m å P ABi P 11 = i =0 m , де P ABi - поточне кутове положення вимірювальної антени; і - 1,2,3...m На Фіг.5 наведено один із варіантів побудови блока 5 з використанням блоків цифрової техніки. Блок визначення кутови х координат 5 складається із: блоків І 5.1, 5.2, 5.3, 5.4, 5.5, 5.21, блоків запам'ятовування 5.6, 5.7, тригерів 5.8, 5.9, підсумувачів 5.10, 5.11, ділильного пристрою 5.12, лічильника 5.13, блока НІ 5.14, блоків затримки 5.15, 5.16, 5.17, 5.18, блоків порівняння 5.19, 5.20. Перед початком роботи блоки з запам'ятовуванням 5.6, 5.7, 5.8, 5.9, 5.10, 5.11, 5.12, 5.13 установлюються в нульовий стан імпульсом початкової установки (ПУ), що надходить з шосто го входу блока 5. æ QОП ö ç ÷ ç P AП - 2 ÷i P P у вигляді послідовності імпульсних сигналів і величини P ABi , è ø у Вхідні сигнали - величина вигляді двійкових паралельних кодів надходять відповідно на перший, другий і третій входи блока 5. æ Q ç P AП - ОП ç 2 è Вхідний сигнал ö ÷i ÷ ø , з третього входу блока 5 надходить на перший вхід блока порівняння 5.20, на æ QОП ö ç ÷ ç P AП ÷i = P ABi 2 ø другий вхід якого надходить величина P ABi . При виконанні умови è 5.20 виробляється керуючий сигнал, який надходить на другі входи блоків І 5.3, 5.21. на виході блока порівняння Вхідний сигнал P P з першого входу блока 5 через перший вхід блока І 5.21 надходить на одиничний вхід тригера 5.8. Тригер 5.8 виробляє керуючий сигнал на одиничному виході, який надходить на керуючий вхід блока І 5.1 і через блок затримки 5.15 на керуючі входи блока НІ 5.14 і блоків І 5.2, 5.3. Сигнал з виходу І 5.3 надходить на лічильний вхід лічильника 5.13. Величина m виробляється лічильником 5.13,. який підраховує кількість імпульсів імпульсної послідовності, яка надходить з першого входу блока 5. Вхідний сигнал P ABi з другого входу блока 5 через блок І 5.1 надходить на блок запам'ятовування 5.6. m Величина å P ABi i=1 виробляється підсумувачем 5.11 по сигналам 11 P ABi , які надходять з виходу блока запам'ятовування 5.6 на вхід блока 5.11. Сигнали P ABi надходять з блока запам'ятовування 5.6 після надходження на нього сигналу опитування O П1 з четвертого входу блока 5. m å P ABi Величина P 11 = i =0 m виробляється у ділильному пристрої 5.12 у вигляді двійкового паралельного коду після надходження сигналу опитування O П2 з п'ятого входу блока 5. m å P ABi Величини i=1 надходять на перший і другий входи ділильного пристрою 5.12 відповідно з виходу блока 5.11 із виходу блока 5.13 через блок І 5.4. m å P ABi Величина i=1 виробляється в блоці 5.11 після надходження на нього імпульсу опитування O П1 через блок затримки 5.18. Величина m надходить на другий вхід блока 5.12 після надходження на керуючий вхід блока І 5.4 імпульсу опитування O П1 з четвертого входу блока 5. m å P ABi Величини P 11 = i =0 P стр = P кстр - P пстр m m , å P ABi i=1 , m виробляються в кутовому стробі, який формується таким чином , P пстр = P А1 P кстр = Pпстр + Q O P пстр де P кстр QO , - початок кутового строба; - кінець кутового строба; - константа, яка дорівнює кутовій ширині діаграми спрямованості антени на вибраному рівні потужності. P =P +Q кстр A1 O Величина виробляється підсумувачем 5.10. Перший сигнал P ABi = P A1 з блока запам'ятовування 5.6 через блок НІ 5.14 надходить на перший вхід блока 5.10. Після надходження керуючого сигналу з тригера 5.8 на керуючий вхід блока НІ 5.14, блок НІ 5.14 не пропускає сигналів P ABi з блока 5.6 на перший вхід підсумувача 5.10. Величина Q O з блока запам'ятовування 5.7 через блок І 5.2 надходить на другий вхід блока 5.10. Величина QO надходить з блока 5.7 після надходження на нього імпульсу опитування O П1 з четвертого входу блока 5. P = P A1 + QO Підсумувач 5.10 виробляє сигнал кстр після надходження на нього сигналу опитування O П1 через блок затримки 5.17. Блок порівняння 5.19 виробляє керуючий сигнал при виконанні умови: P ABi ³ P кстр = P A1 + QO . P кстр = P A1 + QO Величини P Ai , надходять на перший і другий входи блока 5.19 відповідно з виходів блока запам'ятовування 5.6 і підсумувача 5.10. P ³P = P +Q Bi кстр A1 O на ви ході блока порівняння 5.19 виробляється керуючий Коли виконується умова сигнал, який надходить на: - керуючий вхід блока І 5.4; - на одиничний вхід тригера 5.9; - через блок затримки 5.16 на нульові входи блоків 5.6, 5.8, 5.9, 5.10, 5.11, 5.12, 5.13. m å P ABi Величина P 11 = i =0 m з виходу ділильного пристрою 5.12 через блок І 5.5 надходить на перший вихід блока 5. Сигнал P 11 проходить через блок І 5.5 при умові надходження керуючого сигналу з одиничного виходу тригера 5.9 на керуючий вхід блока І 5.5. Після видачі величини P 11 з блока 5.12 на вихід блока 5, сигналом з виходу блока порівняння 5.19, який проходить блок затримки 5.16, установлюються в нульовий стан блоки з пам'яттю 5.6, 5.8, 5.9, 5.10, 5,11, 5.12, 5.13. Після цього робота блока 5 проводиться аналогічно описаній вище. Блоки І 5.1, 5.2, 5.3, 5.4, 5.5, 5.21, блоки запам'я товування 5.6, 5.7, тригери 5.8, 5.9, підсумувачі 5.10, 5.11, ділильний пристрій 5.12, лічильник 5.13, блок НІ 5.14, блоки затримки 5.15, 5.16, 5.17, 5.18, блоки порівняння 5.19, 5.20 є типовими пристроями цифрової техніки [5, 7]. Блок 6 (див. Фіг.1) - пристрій індикації є загальновідомим типовим пристроєм радіолокаційних та радіонавігаційних систем [1,3]. Пристрій індикації призначений для подання інформації у вигляді, зручному для оператора. Інформація може поступати на пристрій індикації безпосередньо з виходу приймача. Якщо швидкість надходження інформації настільки висока, що оператор не встигає слідкувати за нею, то використовуються пристрої знімання та оброблення інформації. У цьому випадку на пристрій індикації поступає узагальнена інформація. Найбільш розповсюдженою формою подання радіолокаційної та радіонавігаційної інформації є візуальна, що здійснюється з використанням електронно-променевих тр убок і знакових табло. Блок 7 (див. Фіг.1) - перемикач (комутатор) є загальновідомим типовим пристроєм радіолокаційних та радіонавігаційних систем. Перемикач використовується для послідовного перемикання СВЧ каналів (антен, приймачів та інших СВЧ пристроїв) [3]. Блоки 8,14, 24, 23 (див. Фіг.1) - блоки НІ є типовим елементом цифрових схем [5]. Може бути використана схема типу 155ЛАЗ. Блоки 9, 13, 22, 25 (див. Фіг.1) - блоки І є типовим елементом цифрових схем [5]. Може бути використана схема типу 155ЛАЗ. Блок 11 (див. Фіг.1) - багатоканальний блок визначення сектора випромінювання є типовим пристроєм радіолокаційних систем [3,6]. Багатоканальний блок визначення сектора випромінювання 11 забезпечує визначення кутового напрямку на ВО в межах ДС пошукової антени. На Фіг.6 наведено один із варіантів побудови блока 11 з використанням блоків цифрової те хніки. Багатоканальний блок визначення сектора випромінювання 11 складається із: тригерів 11.1, 11.4, блоків І 11.2, 11.15, блоків запам'ятовування 11.3, 11.4, 11.11, блока віднімання 11.5, блоків НІ 11.6, 11.7, блоків затримки 11.8, 11.9, 11.10, підсумувача 11.13, блоків порівняння 11.12, 11.16. Перед початком роботи блоки з запам'ятовуванням 11.1, 11.3, 11.5, 11.13, 11.14 установлюються в початковий стан імпульсом початкової установки (ПУ), який надходить з четвертого входу блока 11. Вхідні сигнали - величина P P у вигляді послідовності імпульсних сигналів і величини P АПi , DP у ви гляді двійкових паралельних кодів надходять відповідно на перший , другий і третій входи блока 11. Вхідний сигнал P P з першого входу блока 11 надходить на одиничний вхід тригера 11.1. Тригер 11.1 виробляє керуючий сигнал на одиничному виході, який надходить на перший вихід блока 11, як сигнал захоплення сигналів випромінювання ЗАХ, на перший керуючий вхід блока І 11.2 і через блок затримки 11.8 на керуючі входи блоків НІ 11.6, 11.7. Вхідний сигнал P АПi через блок I 11.2 надходить на блок запам'ятовування 11.3 при надходженні керуючого сигналу з блока порівняння 11.12 на другий керуючий вхід блока І 11.2. Блок порівняння 11.12 виробляє керуючий сигнал при умові, що сигнал DP , який надходить з третього входу блока 11 на перший вхід блока порівняння 11.12 менше сигналу, який надходить на перший вхід блока порівняння 11.12 з блока запам'ятовування 11.11, після надходження імпульсу опитування O П1 з п'ятого входу блока 11. Величина P АПi з блока запам'ятовування 11.3 через блок НІ 11.6 надходить на перший вхід блока 11.5 і перший вхід підсумувача 11.13, де запам'ятовується як величина P АП - пеленг пошукової антени, і на другий вихід блока 11. Величини PP ; Q ОП P AП QОП 2 , P AП + QОП 2 - к утове положення пошукової антени (пеленга) при надходженні імпульсу -константа, яка дорівнює ширині ДС пошукової антени; виробляються в блоці віднімання 11.5 і підсумувачі 11.13, після надходження на їх перші і другі входи величин P AП та QОП 2 . QОП Величина 2 надходить з блока запам'ятовування 11.4 через блок НІ 11.7. QОП Величин P AП та 2 видаються з блоків 11.3, 11.4 після надходження на них імпульсу опитування O П1 з п'ятого входу блока 11. Після надходження керуючого сигналу з одиничного виходу тригера 11.1 через блок затримки 11.8 на керуючі входи блоків НІ 11.6, 11.7, забороняється проходження величин P AП та QОП 2 на перший і другий входи блока віднімання 11.5 і підсумувача 11.13. P AП QОП 2 P AП + QОП 2 Величини , виробляється у блоці віднімання 11.5 і підсумувачі 11.13 після надходження на них імпульсу опитування O П1 через блок затримки 11.9. P AП QОП 2 P AП + QОП 2 з блока 11.5 і підсумувача 11.13 у вигляді двійкових паралельних кодів Величини , надходять на третій і четвертий виходи блок 11 після надходження на блок 11.5 імпульсу опитування Оці через блок затримки 11.10. Імпульс опитування O П1 також надходить на одиничний вхід тригера 11.14, при цьому на його одиничному виході виробляється керуючий сигнал. Керуючий сигнал з одиничного виходу тригера 11.14 надходить на перший вхід блока І 11.15, на другий вхід якого надходить керуючий сигнал з виходу блока порівняння 11.16. На перший і другий входи блока порівняння 11.16 надходять відповідно сигнали: P АПi з другого входу блока æ Q ö ç P AП + ОП ÷i ç 2 ÷ з виходу підсумувача 11.13. è ø 11 і æ Q ö P АПi > ç P AП + ОП ÷ ç ÷ 2 ø , який надходить è Блок порівняння 11.16 виробляє керуючий сигнал при виконанні умови на другий вхід блока І 11.15. Сигнал з виходу блока І 11.15 через блок АБО 11.17 надходить на блоки з запам’ятовуванням 11.1, 11.3, 11.5, 11.13, 11.14 і установлює їх в початковий стан. Після цього блок 11 працює аналогічно описаному вище. Тригери 11.1, 11.14, блоки І 11.2, 11.15, блоки запам'ятовування 11.3, 11.4, 11.11, блок віднімання 11.5, блоки НІ 11.6, 11.7, блоки затримки 11.8, 11.9, 11.10, підсумувач 11.13, блоки порівняння 11.12, 11.16, блок АБО 11.17 є типовими пристроями цифрової техніки [5,7]. Блок 12 (див. Фіг.1) - дільник потужності є загальновідомим елементом СВЧ радіотехнічних схем. Дільник потужності забезпечує розподіл потужності СВЧ енергії на два або декілька каналів у заданому співвідношенні, наприклад, у співвідношенні 1:1. Дільники потужності використовуються для живлення різних (двох або декількох) пристроїв від одного джерела високої частоти. Дільники потужності в більшому числі випадків є високочастотні розгалужені лінії передачі або кінцеві навантажувальні опори з спеціальними відводами [8]. Блок 15 (див. Фіг.1) - формувач сигналу помилки є одним із пристроїв радіолокаційних та радіонавігаційних систем. Формувач сигналу помилки 15 забезпечує визначення сигналу помилки DP у двох режимах роботи: Реж.1 - режим пошуку сектора випромінювання в діапазоні кутів 360°; Реж.2 - режим вимірювання кутового напрямку (пеленга) на ВО. У реж.І сигнал помилки DP визначається згідно формули M æ ö DP = ç P O + å DQ2 (w2 ) ÷ - P АПi ç ÷ i =0 è ø , де P O -константа, яка визначає задане начальне кутове положення пошукової антени (пеленг антени). Пеленг P O може мати, наприклад, нульове значення; DQ2 (w2 ) = QОП - константа, яка дорівнює ширині ДС пошукової антени; P АПi - поточне кутове положення пошукової антени; M P O + å DQ2 (w 2 ) i=0 - задане поточне кутове положення пошукової антени. M P O + å DQ2 (w 2 ) i= 0 Прирощення кута на величину DQ2 (w2 ) = QОП відбувається через інтервал часу Т2, який дорівнює періоду сканування антени ВО. У реж.2 сигнал помилки ДП визначається згідно формули éæ ù Q ö N DP = êç P AП - ОП ÷ + å DQ1(w1)ú - P АПi ç 2 ÷ i=0 êè ú ø ë û , де P AП - пеленг на випромінюючий об'єкт при визначенні сектора випромінювання; æ QОП ö N ç ÷ ç P AП - 2 ÷ + å DQ1(w1) è ø i=0 - задане поточне кутове положення вимірювальної антени при вимірюванні пеленга на ВО; P АПi - поточне кутове положення вимірювальної антени; DQ1(w1) -константа, яка дорівнює прирощенню кутового положення вимірювальної антени, через інтервал часу Т1 (Т1
ДивитисяДодаткова інформація
Назва патенту англійськоюMulti-channel search-measuring direction finder for movable and radiating objects
Автори англійськоюOstapov Anatolii Oleksandrovych, Chyhyryn Oleh Trokhymovych
Назва патенту російськоюМногоканальный поисково-измерительный пеленгатор подвижных излучающих объектов
Автори російськоюОстапов Анатолий Александрович, Чигирин Олег Трофимович
МПК / Мітки
МПК: G01S 3/02
Мітки: випромінюючих, багатоканальний, об'єктів, пошуково-вимірювальний, рухомих, пеленгатор
Код посилання
<a href="https://ua.patents.su/16-79311-bagatokanalnijj-poshukovo-vimiryuvalnijj-pelengator-rukhomikh-viprominyuyuchikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Багатоканальний пошуково-вимірювальний пеленгатор рухомих випромінюючих об’єктів</a>
Пошуково-вимірювальний загоризонтний пеленгатор рухомих випромінюючих об’єктів
Номер патенту: 75745
Опубліковано: 15.05.2006
Автори: Остапов Анатолій Олександрович, Чигирин Олег Трохимович
МПК: G01S 3/02
Мітки: пошуково-вимірювальний, випромінюючих, пеленгатор, загоризонтний, рухомих, об'єктів
Формула / Реферат:
Пошуково-вимірювальний загоризонтний пеленгатор рухомих випромінюючих об'єктів, що складається із вимірювальної антени, приводу антени, першого приймача, блока визначення кутових координат, пристрою індикації, формувача керуючих сигналів, у якому вихід першого приймача приєднаний до першого входу блока визначення кутових координат, перший вхід вимірювальної антени з’єднаний з виходом приводу антени, другий вихід вимірювальної антени...
Загоризонтний багатоцільовий пеленгатор рухомих випромінюючих об’єктів
Номер патенту: 69350
Опубліковано: 15.06.2006
Автори: Чигирин Олег Трохимович, Стеріополо Євген Анатолійович, Покришевський Віктор Михайлович, Тітов Валерій Сергійович, Хозяїнов Сергій Арсенійович, Остапов Анатолій Олександрович, Радченко Октябрина Антонівна
Мітки: пеленгатор, рухомих, загоризонтний, об'єктів, багатоцільовий, випромінюючих
Формула / Реферат:
Корисна модель, що описується, відноситься до клейових композицій, які можуть бути використані в паперовій, поліграфічній, пакувальній і текстильній промисловостях для нанесення ворсових зображень в електростатичному полі.Відома клейова композиція на основі полівінілацетатної емульсії, для нанесення ворсу в електростатичному полі містить: полівінілацетатну емульсію (50%-на) - 80%; поліакриловий емульгатор - 15,0%, 80%-ний розчин...
Багатоканальний вимірювальний апаратно-програмний комплекс для обробки радіолокаційної інформації
Номер патенту: 75152
Опубліковано: 15.03.2006
Автори: Байздренко Олексій Олександрович, Володін Андрій Миколайович
МПК: H04J 9/00, G01S 13/56, G06F 15/16
Мітки: апаратно-програмний, комплекс, обробки, вимірювальний, багатоканальний, інформації, радіолокаційної
Формула / Реферат:
Багатоканальний вимірювальний апаратно-програмний комплекс для обробки радіолокаційної інформації (РЛІ), що містить РЛС кругового огляду, блок обробки аналогової (координатної) радіолокаційної інформації РЛІ і блок обробки вторинної (трасової) радіолокаційної інформації, виконані на базі Intel-сумісних ЕОМ, що містять системний блок з набором модулів стандартної конфігурації, і які підключені до кожного системного блока відеомонітора,...
Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об’єктів
Номер патенту: 8961
Опубліковано: 15.08.2005
Автори: Ліпатов Валерій Павлович, Біличенко Іван Федорович, Андрусенко Микола Іванович, Шовгун Віталій Андрійович, Білановський Михайло Миколайович, Єна Григорій Олександрович, Толстіхін Микола Вікторович
Мітки: пасивна, вимірювання, станція, випромінюючих, повітряних, носіїв, радіолокаційна, координат, надводних, об'єктів
Формула / Реферат:
1. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів, що містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, при цьому перший вхід антени через привід антени підключений до першого виходу датчика сканування антени, перший вихід антени підключений до першого...
Багатоканальний перетворювач аналогової величини в код
Номер патенту: 49327
Опубліковано: 16.09.2002
Автор: Ніколенко Сергій Іванович
МПК: H03K 19/00
Мітки: перетворювач, код, аналогової, багатоканальний, величини
Формула / Реферат:
Багатоканальний перетворювач аналогової величини в код, що містить джерела інформації, підключені через комутатор до першого входу блока перетворення аналогової величини в код, вихід якого підключений до блока пам'яті, блок керування, один вихід якого підключений до керуючих входів комутатора і блока пам'яті, а другий вихід - до другого входу блока перетворення аналогової величини в код, який відрізняється тим, що вихід блока пам'яті...