Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об’єктів
Номер патенту: 8961
Опубліковано: 15.08.2005
Автори: Єна Григорій Олександрович, Ліпатов Валерій Павлович, Білановський Михайло Миколайович, Толстіхін Микола Вікторович, Андрусенко Микола Іванович, Шовгун Віталій Андрійович, Біличенко Іван Федорович

Формула / Реферат
1. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів, що містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, при цьому перший вхід антени через привід антени підключений до першого виходу датчика сканування антени, перший вихід антени підключений до першого входу датчика сканування антени та другого входу блока визначення кутових координат, третій вхід якого підключений до другого виходу датчика сканування антени, четвертий вихід підключений до другого входу датчика сканування антени, перший вихід підключений до перших входів пристрою індикації і першого блока обчислення відстані, другий вихід підключений до другого входу пристрою індикації, третій вхід пристрою індикації підключений до виходу першого блока обчислення відстані, перший вихід формувача керуючих сигналів підключений до другого входу антени, другий вихід підключений до четвертого входу блока визначення кутових координат, а третій вхід антени та другий вхід першого блока обчислення відстані є входами пристрою, яка відрізняється тим, що додатково введені антена компенсації бокового випромінювання, антена компенсації фонового випромінювання, приймач компенсації бокового випромінювання, приймач компенсації фонового випромінювання, блок порівняння та блок аналізу, при цьому вихід антени компенсації бокового випромінювання через приймач компенсації бокового випромінювання підключений до другого входу блока порівняння, вихід антени компенсації фонового випромінювання через приймач компенсації фонового випромінювання підключений до третього входу блока порівняння, вихід якого підключений до першого входу блока визначення кутових координат, згадані другий та третій, а також п'ятий виходи блока визначення кутових координат підключені до входів блока аналізу, вихід якого підключений до четвертого входу пристрою індикації, згаданий вихід приводу антени підключений до перших входів антени компенсації бокового випромінювання та антени компенсації фонового випромінювання, другі входи яких та четвертий вхід антени підключені до третього виходу формувача керуючих сигналів, а згаданий третій вхід антени з'єднаний з третіми входами антени компенсації бокового випромінювання та антени компенсації фонового випромінювання.
2. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів за п. 1, яка відрізняється тим, що антена містить антенне дзеркало, редуктор, датчик кута, перший обертовий пристрій, другий обертовий пристрій, опромінювачі діапазонів радіохвиль L, S, С, Х і вхідні пристрої, що містять вхідні надвисокочастотні (НВЧ) підсилювачі діапазонів L, S, С, X, перетворювачі частоти діапазонів L, С, Χ і НВЧ перемикач, при цьому вхід редуктора є першим входом антени, а вихід з'єднаний з антенним дзеркалом і датчиком кута, другий вхід і вихід якого, підключені через перший обертовий пристрій, є відповідно другим входом і першим виходом антени, опромінювач діапазону радіохвиль L через вхідний НВЧ підсилювач діапазону L та перетворювач частоти діапазону L підключений до першого входу НВЧ перемикача, опромінювач діапазону радіохвиль S підключений до другого входу НВЧ перемикача, опромінювач діапазону радіохвиль С через вхідний НВЧ підсилювач діапазону С та перетворювач частоти діапазону С підключений до третього входу НВЧ перемикача, опромінювач діапазону радіохвиль X через вхідний НВЧ підсилювач діапазону Χ та перетворювач частоти діапазону X підключений до четвертого входу НВЧ перемикача, п'ятий вхід та вихід якого підключені через другий обертовий пристрій до четвертого входу та другого виходу антени.
3. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів за п. 1, яка відрізняється тим, що приймач містить НВЧ підсилювач, подільник потужності, N смугопропускних фільтрів (СПФ) і N детекторів підсилювачів, при цьому вхід НВЧ підсилювача є входом приймача, вихід НВЧ підсилювача через N виходів подільника потужності з'єднаний з входами СПФ, виходи яких в свою чергу підключені до входів детекторів підсилювачів, виходи яких є виходом приймача.
4. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів за п. 1, яка відрізняється тим, що блок порівняння містить N схем, кожна із яких містить перший, другий та третій компаратори, схему рівнозначності, датчик порогу визначення, формувач коротких імпульсів, формувач імпульсів, схему сумісності і тригер, при цьому перші входи компараторів є першим входом блока порівняння, другі входи другого та третього компараторів є, відповідно, другим та третім входами блока порівняння, другий вхід третього компаратора з'єднаний з виходом датчика порогу визначення, виходи першого та другого компараторів через схему рівнозначності, формувач коротких імпульсів і перший вхід схеми сумісності підключені до С-входу тригера, до якого через другий вхід схеми сумісності і формувач імпульсів підключений також вихід третього компаратора, а R-вхід тригера підключений до згаданого виходу третього компаратора.
5. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів за п. 1, яка відрізняється тим, що блок аналізу містить перший ключ, другий ключ, К перших оперативно запам'ятовуючих пристроїв (ОЗП1), К других ОЗП (ОЗП2), перший пороговий суматор, другий пороговий суматор, а також схему рівнозначності, при цьому вихід першого ключа підключений до входу послідовно з'єднаних перших ОЗП1, вихід другого ключа підключений до входу послідовно з'єднаних других ОЗП2, другі виходи першого і К-того ОЗП1 підключені до входів першого порогового суматора, другі виходи першого і К-того ОЗП2 підключені до входів другого порогового суматора, перший вхід першого ключа є першим входом блока аналізу, перший вхід другого ключа є другим входом блока аналізу, виходи першого та другого порогових суматорів через схему рівнозначності з'єднані з виходом блока аналізу, а паралельно з'єднані другі входи першого та другого ключів, К ОЗП1 і К ОЗП2 є третім входом блока аналізу.
Текст
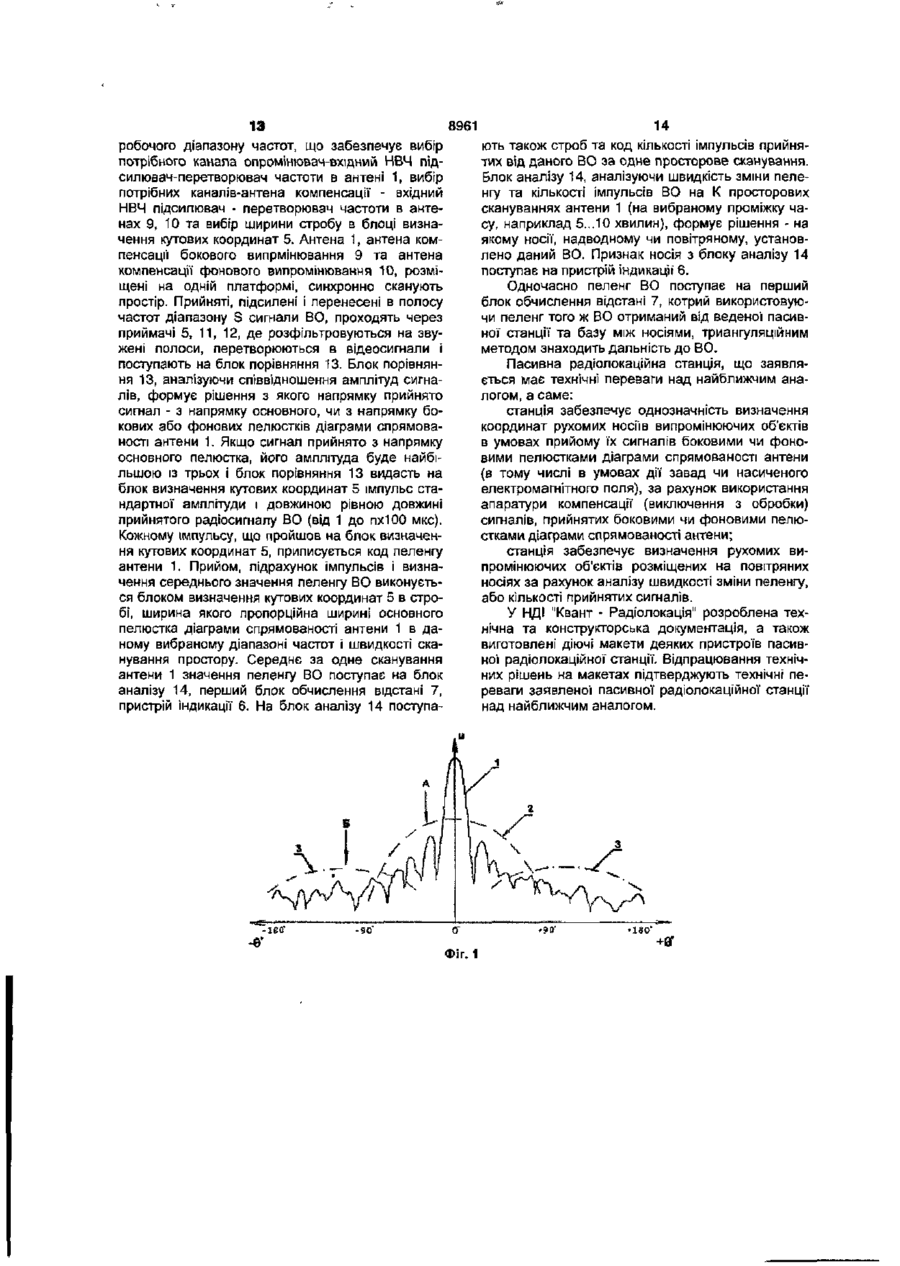
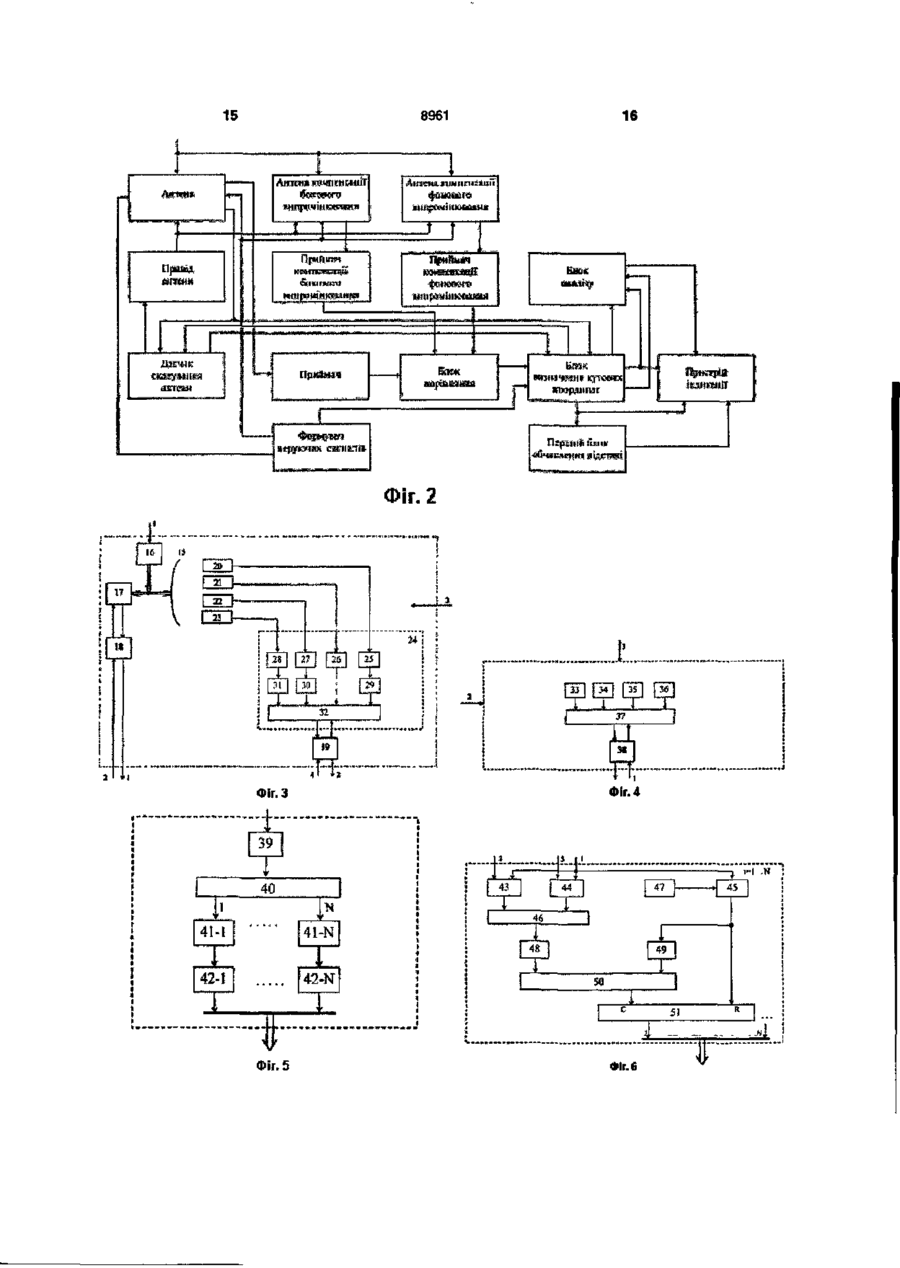
1. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів, що містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, при цьому перший вхід антени через привід антени підключений до першого виходу датчика сканування антени, перший вихід антени підключений до першого входу датчика сканування антени та другого входу блока визначення кутових координат, третій вхід якого підключений до другого виходу датчика сканування антени, четвертий вихід підключений до другого входу датчика сканування антени, перший вихід підключений до перших входів пристрою індикації і першого блока обчислення відстані, другий вихід підключений до другого входу пристрою індикації, третій вхід пристрою індикації підключений до виходу першого блока обчислення відстані, перший вихід формувача керуючих сигналів підключений до другого входу антени, другий вихід підключений до четвертого входу блока визначення кутових координат, а третій вхід антени та другий вхід першого блока обчислення відстані є входами пристрою, яка відрізняється тим, що додатково введені антена компенсації бокового випромінювання, антена компенсації фонового випромінювання, приймач компенсації бокового випромінювання, приймач компенсації фонового випромінювання, блок порівняння та блок аналізу, при цьому вихід антени компенсації бокового випромінювання через приймач компенсації бокового випромінювання підключений до другого входу блока порівняння, вихід антени компенсації фонового випромінювання через приймач компенсації фонового випромінювання підключений до третього входу блока порівняння, вихід якого підключений до першого входу блока визначення кутових координат, згадані другий та третій, а також п'ятий виходи блока визначення кутових координат підключені до входів блока аналізу, вихід якого підключений до четвертого входу пристрою індикації, згаданий вихід приводу антени підключений до перших входів антени компенсації бокового випромінювання та антени компенсації фонового випромінювання, другі входи яких та четвертий вхід антени підключені до третього виходу формувача керуючих сигналів, а згаданий третій вхід антени з'єднаний з третіми входами антени компенсації бокового випромінювання та антени компенсації фонового випромінювання. 2. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів за п. 1, яка відрізняється тим, що антена містить антенне дзеркало, редуктор, датчик кута, перший обертовий пристрій, другий обертовий пристрій, опромінювачі діапазонів радіохвиль L, S, С, X і вхідні пристрої, що містять вхідні надвисокочастотні (НВЧ) підсилювачі діапазонів L, S, С, X, перетворювачі частоти діапазонів L, С, X і НВЧ перемикач, при цьому вхід редуктора є першим входом антени, а вихід з'єднаний з антенним дзеркалом і датчиком кута, другий вхід і вихід якого, підключені через перший обертовий пристрій, є відповідно другим входом і першим виходом антени, опромінювач діапазону радіохвиль L через вхідний НВЧ підсилювач діапазону L та перетворювач частоти діапазону L підключений до першого входу НВЧ перемикача, опромінювач діапазону радіохвиль S підключений до другого входу НВЧ перемикача, опромінювач діапазону радіохвиль С через вхідний НВЧ підсилювач діапазону С та перетворювач частоти діапазону С підключений до третього входу НВЧ перемикача, опромінювач діапазону радіохвиль X через вхідний НВЧ підсилювач діапазону X та перетворювач частоти діапазону X підключений до четвертого входу НВЧ перемикача, п'ятий вхід та вихід якого підключені через другий обертовий пристрій до четвертого входу та другого виходу антени. 3. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випро СО (О D at 8961 мінюючих об'єктів за п. 1, яка відрізняється тим, що приймач містить НВЧ підсилювач, подільник потужності, N смугопропускних фільтрів (СПФ) і N детекторів підсилювачів, при цьому вхід НВЧ підсилювача є входом приймача, вихід НВЧ підсилювача через N виходів подільника потужності з'єднаний з входами СПФ, виходи яких в свою чергу підключені до входів детекторів підсилювачів, виходи яких є виходом приймача. 4. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів за п. 1, яка відрізняється тим, що блок порівняння містить N схем, кожна із яких містить перший, другий та третій компаратори, схему рівнозначності, датчик порогу визначення, формувач коротких Імпульсів, формувач імпульсів, схему сумісності і тригер, при цьому перші входи компараторів є першим входом блока порівняння, другі входи другого та третього компараторів є, відповідно, другим та третім входами блока порівняння, другий вхід третього компаратора з'єднаний з виходом датчика порогу визначення, виходи першого та другого компараторів через схему рівнозначності, формувач коротких імпульсів і перший вхід схеми сумісності підключені до С-входу тригера, до якого через другий вхід схеми сумісно сті і формувач імпульсів підключений також вихід третього компаратора, а R-вхід тригера підключений до згаданого виходу третього компаратора. 5. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів за п. 1, яка відрізняється тим, що блок аналізу містить перший ключ, другий ключ, К перших оперативно запам'ятовуючих пристроїв (ОЗП1), К других ОЗП (ОЗП2), перший пороговий суматор, другий пороговий суматор, а також схему рівнозначності, при цьому вихід першого ключа підключений до входу послідовно з'єднаних перших ОЗП1, вихід другого ключа підключений до входу послідовно з'єднаних других ОЗП2, другі виходи першого і К-того ОЗП1 підключені до входів першого порогового суматора, другі виходи першого і К-того ОЗП2 підключені до входів другого порогового суматора, перший вхід першого ключа є першим входом блока аналізу, перший вхід другого ключа є другим входом блока аналізу, виходи першого та другого порогових суматорів через схему рівнозначності з'єднані з виходом блока аналізу, а паралельно з'єднані другі входи першого та другого ключів, К ОЗП1 і К ОЗП2 є третім входом блока аналізу. Корисна модель відноситься до області пасивної локації, а саме, до пристроїв, що забезпечують вимірювання координат та параметрів руху надводних та повітряних об'єктів на основі прийому та обробки сигналів, випромінюваних їх штатними радіотехнічними системами (радіолокаційними станціями, тощо). Технічні рішення, реалізовані в пасивній станції, можуть бути використані також в системах радіомоніторингу та радіонавігації. Відомо, що для визначення координат (пеленг, дальність) місцезнаходження рухомого носія випромінюючого об'єкта (ВО) з використанням пасивних радіолокаційних пристроїв потрібно виконати вимірювання його кутових напрямків (пеленга) з рознесених у просторі на деяку відстань (базу) точок. У простішому випадку, при одночасному вимірюванні з двох точок, місцезнаходження носія ВО визначається триангуляційним способом, як точка перетину двох ліній пеленгів ["Теоретические основы радиолокации" под ред. Ширмана, М.,"Сов. радио", 1970]. Координати місцезнаходження ВО можуть визначатись також і одним пасивним пристроєм розміщеним на рухомому носії", в якому під час руху відбувається формування бази [А.Ґ. Николаев, С.В. Перцов "Радиотеплолокация" (пассивная радиолокация), М., "Сов. радио", 1964]. Для компенсації переміщення носія ВО, носій пасивного пристрою виконує прямий та зворотний галси курсом, перпендикулярним пеленгу ВО і з постійною швид кістю. На прямому галсі пасивний пристрій виконує поточне багаторазове вимірювання і обробку пеленгів ВО. По обробленим пеленгам прямого галсу на зворотному галсі проводиться екстраполювання пеленгу ВО, за умови, що носій пристрою продовжує рухатись в напрямку прямого галсу На зворотному галсі носія пасивний пристрій також виконує велике число замірів пеленгу ВО і оброблює їх. По обробленому пеленгу зворотного галсу і екстрапольованому, з урахуванням величини бази пройденої носієм на зворотному галсі, пеленгу уявного прямого галсу, триангуляційним методом знаходиться дальність до ВО. Такий метод реалізований в пасивній станції відповідно заявки №98073426 від 1.07.1998р. МКІ G01S5/01, G01S5/06. Очевидно, що похибка вимірювання пеленгу відіграє важливу роль і обумовлює похибку визначення місцезнаходження ВО. Відомо, що антена пасивного радіолокаційного пристрою може приймати радіосигнали ВО не тільки основним, але і боковими та фоновими пелюстками діаграми її спрямованості [И.С. Кукес, М.Е. Старик "Основы радиопеленгации "М., "Сов. радио", 1964г]. Прийом, обробка і використання пеленгів таких сигналів, суттєво збільшують похибку, а інколи повністю унеможливлюють визначення дійсного пеленгу ВО. Для виявлення дійсного напрямку приходу сигналу використовують різні методи аналізу прийнятих сигналів ВО, наприклад амплітудний, який 8961 реалізований в радіопеленгаторній системі, патент GB №2243041, G01S3/28. Система містить кільцеву решітку антен, рівномірно рознесених навколо центральної осі. Для виявлення дійсного напрямку приходу сигналу, всі сигнали прийняті різними антенами порівнюються по амплітуді та частоті і таким чином знаходиться напрямок найбільш інтенсивного сигналу, тобто пеленг ВО. Похибка одноразового вимірювання пеленгу пеленгатором становить не менше половини ширини діаграми спрямованості його антени. В названій системі одна {із восьми) антена перекриває зону кутів 45 град, тобто, похибка вимірювання пеленгу при цьому, становить не менше 22,5 град. Недоліком системи є потреба в значній кількості антен, що для забезпечення високої точності пеленгування (похибка не більше 1 град.), обумовлює використання антен великих розмірів і робить неможливим їх розміщення на рухомих носіях. Найбільш близький по технічній суті і досяжному технічному результату є пристрій для визначення координат рухомого випромінюючого об'єкта, який розміщений на одному носії, наприклад ведучому, приймальному пунктах, патент UA 46245. Відомий пристрій для визначення координат випромінюючого об'єкта містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, в якому, перший вхід антени через привід антени підключений до першого виходу датчика сканування антени, перший вихід антени підключений до першого входу датчика сканування антени та другого входу блока визначення кутових координат, третій вхід якого підключений до другого виходу датчика сканування антени, четвертий вихід підключений до другого входу датчика сканування антени, перший вихід підключений до перших входів пристрою індикації і першого блока обчислення відстані, другий вихід підключений до другого входу пристрою індикації, третій вхід пристрою індикації підключений до виходу першого блока обчислення відстані, перший вихід формувача керуючих сигналів підключений другого входу антени, другий вихід підключений до четвертого входу блока визначення кутових координат а третій вхід антени та другий вхід першого блока обчислення відстані є входами пристрою. Найближчий аналог працює таким чином. Антена ведучого пасивного пристрою, розміщеного на одному носії, сканує простір та знаходить пеленг на ВО. Пеленг на той же ВО знаходить і антена веденого пасивного пристрою, розміщеного на другому носи. Ведучий та ведений пасивні пристрої обмінюються між собою інформацією, котра, крім пеленгів ВО, містить дальність, тобто базу між носіями. По відомим двом пеленгам ВО і величині бази між ними в першому блоці обчислення відстані тріангуляційним методом знаходиться дальність до ВО. Недоліком найближчого аналогу є те, що прийом та обробка ним сигналів ВО, прийнятих боковими та фоновими пелюстками спрямованості його антени, призводить до неоднозначного вимі рювання пеленгу і, як наслідок до значних похибок вимірювання дальності до ВО, що в свою чергу унеможливлює визначення параметрів (швидкості, напрямку) їх руху. В основу корисної моделі поставлена задача створити пасивну станцію вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів, яка дозволила би забезпечити однозначність вимірювання координат та параметрів руху надводних та повітряних випромінюючих об'єктів. Поставлена задача вирішується тим, що в пристрій для визначення координат випромінюючого об'єкта, який містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, при цьому перший вхід антени через привід антени підключений до першого виходу датчика сканування антени, перший вихід антени підключений до першого входу датчика сканування антени та другого входу блока визначення кутових координат, третій вхід якого підключений до другого виходу датчика сканування антени, четвертий вихід підключений до другого входу датчика сканування антени, перший вихід підключений до перших входів пристрою індикації і першого блока обчислення відстані, другий вихід підключений до другого входу пристрою індикації, третій вхід пристрою індикації підключений до виходу першого блока обчислення відстані, перший вихід формувача керуючих сигналів підключений другого входу антени, другий вихід підключений до четвертого входу блока визначення кутових координат, а третій вхід антени та другий вхід першого блока обчислення відстані є входами пристрою, згідно корисної моделі, додатково введені антена компенсації бокового випромінювання, антена компенсації' фонового випромінювання, приймач компенсації бокового випромінювання, приймач компенсації фонового випромінювання, блок порівняння та блок аналізу, при цьому вихід антени компенсації бокового випромінювання через приймач компенсації бокового випромінювання підключений до другого входу блока порівняння, вихід антени компенсації фонового випромінювання через приймач компенсації фонового випромінювання підключений до третього входу блока порівняння, вихід якого підключений до першого входу блока визначення кутових координат, згадані другий та третій, а також п'ятий виходи блока визначення кутових координат підключені до входів блока аналізу, вихід якого підключений до четвертого входу пристрою індикації, згаданий вихід приводу антени підключений до перших входів антени компенсації бокового випромінювання та антени компенсації фонового випромінювання, другі входи яких та четвертий вхід антени підключені до третього виходу формувача керуючих сигналів, а згаданий третій вхід антени з'єднаний з третіми входами антени компенсації бокового випромінювання та антени компенсації фонового випромінювання. Крім того, в пасивній радіолокаційній станції вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів, згідно корисної' моделі, антена містить антенне дзеркало, редуктор, датчик кута, перший обертовий пристрій, другий 8961 обертовий пристрій, опромінювані діапазонів радіохвиль L, S, С, X і вхідні пристрої, що містять вхідні надвисокочастотні (НВЧ) підсилювачі діапазонів L, S, С, X, перетворювачі частоти діапазонів L, С, X І НВЧ перемикач при цьому, вхід редуктора є першим входом антени а вихід з'єднаний з антенним дзеркалом і датчиком кута другий вхід і вихід якого, підключені через перший обертовий пристрій, є відповідно другим входом і першим виходом антени, опромінювач діапазону радіохвиль L, через вхідний НВЧ підсилювач діапазону L та перетворювач частоти діапазону L, підключений до першого входу НВЧ перемикача, опромінювач діапазону радіохвиль S, підключений до другого входу НВЧ перемикача, опромінювач діапазону радіохвиль С, через вхідний НВЧ підсилювач діапазону С та перетворювач частоти діапазону С підключений до третього входу НВЧ перемикача, опромінювач діапазону радіохвиль X, через вхідний НВЧ підсилювач діапазону X та перетворювач частоти діапазону X, підключений до четвертого входу НВЧ перемикача п'ятий вхід та вихід якого, підключені через другий обертовий пристрій, до четвертого входу та другого виходу антени. Крім того, в пасивній радіолокаційної станції вимірювання координат носив надводних та повітряних випромінюючих об'єктів, згідно корисної моделі, приймач містить НВЧ підсилювач, подільник потужності, N смугопропускних фільтрів (СПФ) і N детектор і в-підсилювачі в при цьому, вхід НВЧ підсилювача є входом приймача, вихід НВЧ підсилювача через N виходів подільника потужності, з'єднаний з входами СПФ, виходи яких в свою чергу підключені до входів детекторі в-підсилювач і в виходи яких є виходом приймача 4. Крім того, в пасивній радіолокаційній станції вимірювання координат носив надводних та повітряних випромінюючих об'єктів, згідно корисної моделі, блок порівняння містить N схем кожна із яких містить перший, другий та третій компаратори, схему рівнозначності, датчик порогу визначення, формувач коротких імпульсів, формувач імпульсів, схему сумісності і тригер при цьому, перші входи компараторів є першим входом блока порівняння, другі входи другого та третього компараторів є відповідно, другим та третім входами блока порівняння, другий вхід третього компаратора з'єднаний з виходом датчика порогу визначення, виходи першого та другого компараторів через схему рівнозначності, формувач коротких імпульсів і перший вхід схеми сумісності підключені до С-входу тригера, до якого, через другий вхід схеми сумісності і формувач імпульсів підключений також вихід третього компаратора, R-вхід тригера підключений до згаданого виходу третього компаратора. Крім того, в пасивній радіолокаційній станції вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів, згідно корисної моделі, блок аналізу містить перший ключ, другий ключ, К перших оперативно запам'ятовуючих пристроїв (ОЗП1), К других ОЗП (ОЗП2), перший пороговий суматор, другий пороговий суматор, а також схему рівнозначності при цьому, вихід першого ключа підключений до входу послідовно з'єднаних перших ОЗП1, вихід другого ключа підключений до входу послідовно з'єднаних других ОЗП2, другі 8 виходи першого І К-ого ОЗП1 підключені до входів першого порогового суматора, другі виходи першого і К-ого ОЗП2 підключені до входів другого порогового суматора, перший вхід першого ключа є першим входом блока аналізу, перший вхід другого ключа є другим входом блока аналізу, виходи першого та другого порогових суматорів через схему рівнозначності з'єднані з виходом блока аналізу а паралельно з'єднані другі входи першого та другого ключів, К ОЗП1 і К ОЗП2 є третім входом блока аналізу. Така побудова пасивної радіолокаційної станції вимірювання координат забезпечує однозначність визначення координат ВО розміщених на надводних носіях, а також дозволяє визначити повітряні носії ВО. Суть корисної моделі роз'яснюється наступним описом та кресленнями, де: на Фіг.1 наведені суміщені діаграми спрямованості антени (крива 1), антени компенсації бокового випромінювання (крива 2) та антени компенсації фонового випромінювання (крива 3); на Фіг.2 наведена блок-схема пасивної радіолокаційної станції вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів; на Фіг.З наведена блок-схема антени; на Фіг.4 наведена блок-схема антени компенсації бокового випромінювання; на Фіг.5 наведена блок-схема приймача; на Фіг.6 наведена блок-схема блока порівняння; на Фіг.7 наведена блок-схема блока аналізу. Розгляд суміщених діаграм засвідчує, що амплітуда сигналів прийнятих антеною (крива 1 Фіг. 1) перевищує амплітуду сигналів прийнятих антеною компенсації бокового випромінювання та антеною компенсації фонового випромінювання (криві 2, З Фіг.1) тільки в одному напрямку - напрямку основного пелюстка діаграми спрямованості. Прийнятий з одного і того ж напрямку, наприклад з напрямку А (Фіг.1) сигнал, поступає на входи антени, антени компенсації бокового випромінювання та антени компенсації фонового випромінювання. Далі, підсилені в приймачах сигнали поступають на блок порівняння. Приймач, приймач компенсації бокового випромінювання та приймач компенсації" фонового випромінювання підсилюють та перетворюють прийняті радіосигнали в відеосигнали, але мають однакові параметри, тому амплітуди сигналів, що прийшли на блок порівняння, зберігають співвідношення приведене на Фіг.1. Блок порівняння, аналізуючи співвідношення амплітуд сигналів, формує рішення - сигнал прийнятий основним пелюстком діаграми спрямованості антени - так чи ні? Якщо сигнал прийнято основним пелюстком (напрямок ~ 0 градусів, Фіг.1), то його амплітуда буде найбільшою із трьох і блок порівняння дозволить його проходження на вхід блока визначення кутових координат. Якщо сигнал прийнятий з напрямку А (див. Фіг.1), тобто боковими пелюстками діаграми спрямованості антени, то його амплітуда буде меншою, за амплітуду того ж сигналу прийнятого антеною компенсації бокового випромінювання і блок порівняння, аналізуючи співвідношення амплітуд сигналів, заборонить прохід сигналу з виходу приймача. 8961 Аналогічно станція працює, якщо сигнал буде прийнято з напрямку Б (Фіг 1) В даному випадку амплітуда сигналу прийнята антеною компенсації фонового випромінювання перевищить амплітуду сигналу прийнятого антеною Запропонована пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів (Фіг 1) містить антену 1, привід антени 2, датчик сканування антени 3, приймач 4, блок визначення кутових координат 5, пристрій індикації б, перший блок обчислення відстані 7, формувач керуючих сигналів 8 антену компенсації бокового випромінювання 9, антену компенсації фонового випромінювання 10, приймач компенсації бокового випромінювання 11, приймач компенсації фонового випромінювання 12, блок порівняння 13 та блок аналізу 14, при цьому перший вхід антени 1 через привід антени 2 підключений до першого виходу датчика сканування антени 3, перший вихід антени 1 підключений до першого входу датчика сканування антени З та другого входу блока визначення кутових координат 5, третій вхід якого підключений до другого виходу датчика сканування антени 3, четвертий вихід підключений до другого входу датчика сканування антени 3, перший вихід підключений до перших входів пристрою індикації 6 і першого блока обчислення відстані 7, другий вихід підключений до другого входу пристрою індикації 6, третій вхід пристрою індикації 6 підключений до виходу першого блока обчислення відстані 7, перший вихід формувача керуючих сигналів 8 підключений другого входу антени 1, другий вихід підключений до четвертого входу блока визначення кутових координат 5, третій вхід антени 1 та другий вхід першого блока обчислення відстані 7 є входами пристрою, вихід антени компенсації бокового випромінювання 9 через приймач компенсації бокового випромінювання 11 підключений до другого входу блока порівняння 13, вихід антени компенсації фонового випромінювання 10 через приймач компенсації фонового випромінювання 12 підключений до третього входу блока порівняння 13, вихід якого підключений до першого входу блока визначення кутових координат 5, згадані другий та третій, а також п'ятий виходи блока визначення кутових координат 5 підключені до входів блока аналізу 14, вихід якого підключений до четвертого входу пристрою індикації 6, згаданий вихід приводу антени 2 підключений до перших входів антени компенсації бокового випромінювання 9 та антени компенсації* фонового випромінювання 10, другі входи яких та четвертий вхід антени 1 підключені до третього виходу формувача керуючих сигналів 8, а згаданий третій вхід антени 1 з'єднаний із третіми входами антени компенсації бокового випромінювання 9 та антени компенсації фонового випромінювання 10 Антена 1 містить антенне дзеркало 15, редуктор 16, датчик кута 17, перший обертовий пристрій 18, другий обертовий пристрій 19, опромінювані діапазонів радіохвиль L, S, С, X, ВІДПОВІДНО 20, 21, 22, 23 і ВХІДНІ пристрої 24, що містять ВХІДНІ надвисокочастотні (НВЧ) підсилювачі діапазонів L, S, С, X, ВІДПОВІДНО 25, 26, 27, 28, перетворювачі частоти діапазонів L, С, X, ВІДПОВІДНО 29, ЗО, 31 і НВЧ пе 10 ремикач 32 при цьому, вхід редуктора 16 є першим входом антени 1 а вихід з'єднаний з антенним дзеркалом 15 і датчиком кута 17 другий вхід і вихід якого, підключені через перший обертовий пристрій 18, є ВІДПОВІДНО другим входом і першим виходом антени 1, опромінювач діапазону радіохвиль L 20, через вхідний НВЧ підсилювач діапазону L 25 та перетворювач частоти діапазону L 29, підключений до першого входу НВЧ перемикача 32, опромінювач діапазону радіохвиль S 26, підключений до другого входу НВЧ перемикача 32, опромінювач діапазону радіохвиль С 22, через вхідний НВЧ підсилювач діапазону С 27 та перетворювач частоти діапазону С 30, підключений до третього входу НВЧ перемикача 32, опромінювач діапазону радіохвиль X 23, через вхідний НВЧ підсилювач діапазону X 28 та перетворювач частоти діапазону X 31, підключений до четвертого входу НВЧ перемикача 32 п'ятий вхід та вихід якого, підключені через другий обертовий пристрій 19, є ВІДПОВІДНО четвертим входом та другим виходом антени 1 Антена компенсації бокового випромінювання 9, див Фіг 5, містить решітку напівхвильових вібраторів 33, решітку напівхвильових вібраторів 34, рупорну антену 35 і рупорну антену 36 виходи яких, через ВХІДНІ пристрої 37 і обертовий пристрій 38, підключені до входу приймача компенсації фонового випромінювання 11. Параметри (коефіцієнт підсилення та ширина діаграми спрямованості) блоків 33, 34, 35 і 36 підібрані таким чином, щоб у всіх робочих діапазонах радіохвиль вони переви щували параметри бічних пелюстків діаграми спрямованості антени 1 (криві 2 11 на Фіг 1) Антена компенсації фонового випромінювання 10 має таку ж саму побудову як і антена компенсації бокового випромінювання 9, тільки и параметри перевищують параметри антени 1 в районі фонового випромінювання (криві 31 1 на Фіг 1) Антена 1, антена компенсації бокового випромінювання 9 і антена компенсації фонового випромінювання 10 жорстко закріплені на одній поворотній платформі, що керується приводом антени 2 Максимуми діаграм спрямованості антени 1 і антени компенсації бокового випромінювання 9 співпадають, а максимуми діаграм спрямованості антени компенсації фонового випромінювання 10 орієнтовані відносно них під кутами ±90 град Приймач 4, приймач компенсації бокового випромінювання 11 та приймач компенсації фонового випромінювання 12 мають одинакову побудову, одинакові технічні параметри Приймачі 4, 11, 12 забезпечують підсилення прийнятих та перенесених в базовий діапазон S радіохвиль, розфільтровку їх на звужені смуги частот, формування і підсилення відеосигналів Приймачі побудовані по схемі прямого підсилення, що забезпечує широку полосу радіохвиль що одночасно приймаються На Фіг 5 приведена блок - схема приймача 4 який містить, НВЧ підсилювач 39, подільник потужності 40, смугопропускаючі фільтри (СПФ) 411 41-N і детектори-підсилювачі 42-1 42-N при цьому, вхід НВЧ підсилювача 39 є входом приймача 4, вихід НВЧ підсилювача 39 через N виходів подільника потужності 40, з'єднаний з входами 8961 12 11 хаються курсами близькими до паралельних курсу (СПФ) 41-1 41-N, виходи яких в свою чергу підносія пасивної станції Коли повітряні носи ВО руключені до входів детекторі в-підсилювач їв 42хаються курсом на, чи курсом від носія пасивної 1...42-N виходи яких є виходом приймача 4 станції, швидкість зміни їх пеленгів невизначена, Особливістю побудови пасивної радіолокаційале в цьому випадку буде використано критерій ної станції що пропонується є те, що частина апашвидкості зміни КІЛЬКОСТІ сигналів, що прийняті від ратури яка традиційно входить в приймачі, а іменВО Пояснюється це тим, що на відстані прямої НО-ВХІДНІ пристрої, конструктивно винесена видимості, яка для повітряних носив може станоякомога ближче до антенних пристроїввити 100км і більше, пасивна станція буде приймаопромінювачів антени 1 та компенсаційних антен ти сигнали не тільки основного пелюстка діаграми 9, 10 Така м побудова забезпечує низький рівень спрямованості антени ВО, а і сигнали її бокових та некорисних витрат прийнятих сигналів ВО, прийом фонових пелюстків При цьому КІЛЬКІСТЬ прийнятих сигналів ВО малої потужності чи з далекої відстані сигналів ВО при зменшенні відстані різко збільшуБлоки вхідних пристроїв та приймачів побудоється, що є другою відзнакою повітряного ВО вані на сучасних твердотільних малогабаритних НВЧ елементах діапазонів L, S, С, X, що виготовляються світовими виробниками, такими як, AWANTEK, HEWLETT PACKARD, MIA COM, ANALOG DEVICES Блок порівняння 13, див Фіг 6, містить N схем кожна із яких містить перший 43, другий 44 та третій 45 компаратори, схему рівнозначності 46, датчик порогу визначення 47, формувач коротких імпульсів 48, формувач імпульсів 49, схему сумісності 50 і тригер 51 при цьому, перші входи компараторів 43, 44, 45 є першим входом блока порівняння 13, другі входи другого 44, та третього 45 компараторів є ВІДПОВІДНО, другим та третім входами блока порівняння 13, другий вхід третього компаратора 45 з'єднаний з виходом датчика порогу визначення 47, виходи першого 43 та другого 44 компараторів через схему рівнозначності 46, формувач коротких імпульсів 48 і перший вхід схеми сумісності 50 підключені до С-входу тригера 51, до якого, через другий вхід схеми сумісності 50 і формувач імпульсів 49 підключений також вихід третього компаратора 45, Я-вхщ тригера 51 підключений до згаданого виходу третього компаратора 45 Особливістю блока порівняння 13 є те, що рішення про прийом сигналу основним, боковим чи фоновим пелюстком діаграми спрямованості антени 1 приймається на короткому проміжку часу (приблизно 1мкс), що формується формувачем коротких імпульсів 41 при перевищенні сигналу в боковому чи фоновому каналі Після того як було винесено рішення про прийом основним пелюстком, сигнал завади чи сигнал другого мішаючого випромінюючого об'єкта прийнятий антеною компенсації бокового випромінювання 9, чи антеною компенсації фонового випромінювання 10, навіть якщо їх амплітуда і перевищить в даний час амплітуду корисного сигналу що приймається в даний момент часу основним пелюстком, не зможуть заборонити прохід корисного сигналу до закінчення його дії Датчик порогу визначення 47 задає поріг визначення корисних сигналів Тригер 51 формує сигнал стандартної амплітуди на час дії корисного сигналу Така побудова блока порівняння 13 підвищує працездатність станції в умовах дії завад а також насиченого електромагнітного полю Блок аналізу 14 забезпечує виявлення ВО розміщених на повітряних носіях. Відзнакою параметрів сигналів прийнятих від повітряних носив, є велика швидкість зміни їх пеленгу, коли вони ру Блок аналізу 14, див Фіг 7, містить перший ключ 52, другий ключ 53, К перших оперативно запам'ятовуючих пристроїв (03П1) 54, К других ОЗП (03П2) 55, перший пороговий суматор 56, другий пороговий суматор 57, а також схему рівнозначності 58 при цьому, вихід першого ключа 52 підключений до входу послідовно з'єднаних перших ОЗП1 54, вихід другого ключа 53 підключений до входу послідовно з'єднаних других ОЗП2 55, другі виходи першого і N-oro ОЗП1 54 підключені до входів першого порогового суматора 56, другі виходи першого і К-ого ОЗП2 55 підключені до входів другого порогового суматора 57, перший вхід першого ключа 52 є першим входом блока аналізу 14, перший вхід другого ключа 53 є другим входом блока аналізу 14, виходи першого 56, та другого 57 порогових суматорів через схему рівнозначності 58 з'єднані з виходом блока аналізу 14 а паралельно з'єднані другі входи першого 52, та другого 53 ключів, К ОЗП1 54 і К ОЗП2 55 є третім входом блока аналізу 14. Працює блок аналізу 14 наступним чином На першому скануванні простору антеною 1, під час проходу основним пелюстком и діаграми спрямованості напрямку на ВО блок визначення кутових координат 5 формує строб, ширина якого пропорційна швидкості сканування і ширині основного пелюстка Строб поступає на третій вхід блока аналізу 14, відкриває ключі 52, 53 і забезпечує запис в перший із К ОЗП1 54 і перший із К ОЗП2 55 коду пеленга ВО (Пі-1) і коду кількості імпульсів (Мі-1), що були прийняті від даного ВО в стробі Строб, сформований на другому скануванні простору антеною 1, перенесе код пеленгу і код КІЛЬКОСТІ імпульсів першого сканування в другий із К ОЗП1 54 і другий із К ОЗП2 55, а на їх місця запишуться значення пеленгу та КІЛЬКОСТІ імпульсів ВО другого сканування По закінченні К-го сканування будуть заповнені всі К ОЗП1 54 і всі К ОЗП2 55 Коди пеленгів із першого і К-ого ОЗП1 54 поступлять на перший пороговий суматор 56, а коди кількості імпульсів із першого і К-ого ОЗП2 55 поступлять на другий пороговий суматор 57. Як тільки різниця кодів пеленгів чи різниця кодів імпульсів перевершить задані порогові величини, порогові суматори 56, 57 сформують признак - повітряний ВО і через схему рівнозначності 58 видадуть його на пристрій індикації 6 Робота пасивної радіолокаційної станції відбувається таким чином Формувач керуючих сигналів 8 ведучої пасивної станції видає в антени 1, 9, 10 та блок визначення кутових координат 5 команду 13 8961 14 ють також строб та код кількості імпульсів прийняробочого діапазону частот, що забезпечує вибір тих від даного ВО за одне просторове сканування. потрібного канала опромінювач-вхідний НВЧ підБлок аналізу 14, аналізуючи швидкість зміни пелесилювач-перетворювач частоти в антені 1, вибір нгу та кількості імпульсів ВО на К просторових потрібних каналів-антена компенсації - вхідний скануваннях антени 1 (на вибраному проміжку чаНВЧ підсилювач - перетворювач частоти в антесу, наприклад 5...10 хвилин), формує рішення - на нах 9, 10 та вибір ширини стробу в блоці визнаякому носії, надводному чи повітряному, установчення кутових координат 5. Антена 1, антена комлено даний ВО. Признак носія з блоку аналізу 14 пенсації бокового випрмінювання 9 та антена поступає на пристрій індикації 6. компенсації фонового випромінювання 10, розміщені на одній платформі, синхронно сканують Одночасно пеленг ВО поступає на перший простір. Прийняті, підсилені і перенесені в полосу блок обчислення відстані 7, котрий використовуючастот діапазону S сигнали ВО, проходять через чи пеленг того ж ВО отриманий від веденої пасивприймачі 5, 11, 12, де розфільтровуються на звуної станції та базу між носіями, триангуляційним жені полоси, перетворюються в відеосигнали і методом знаходить дальність до ВО. поступають на блок порівняння 13. Блок порівнянПасивна радіолокаційна станція, що заявляня 13, аналізуючи співвідношення амплітуд сигнається має технічні переваги над найближчим аналів, формує рішення з якого напрямку прийнято логом, а саме: сигнал - з напрямку основного, чи з напрямку бостанція забезпечує однозначність визначення кових або фонових пелюстків діаграми спрямовакоординат рухомих носіїв випромінюючих об'єктів ності антени 1. Якщо сигнал прийнято з напрямку в умовах прийому їх сигналів боковими чи фоноосновного пелюстка, його амплітуда буде найбівими пелюстками діаграми спрямованості антени льшою із трьох і блок порівняння 13 видасть на (в тому числі в умовах дії завад чи насиченого блок визначення кутових координат 5 імпульс стаелектромагнітного поля), за рахунок використання ндартної амплітуди і довжиною рівною довжині апаратури компенсації (виключення з обробки) прийнятого радіосигналу ВО (від 1 до пхЮО мкс). сигналів, прийнятих боковими чи фоновими пелюКожному імпульсу, що пройшов на блок визначенстками діаграми спрямованості антени; ня кутових координат 5, приписується код пеленгу станція забезпечує визначення рухомих виантени 1. Прийом, підрахунок імпульсів і визнапромінюючих об'єктів розміщених на повітряних чення середнього значення пеленгу ВО виконуєтьносіях за рахунок аналізу швидкості зміни пеленгу, ся блоком визначення кутових координат 5 в строабо кількості прийнятих сигналів. бі, ширина якого пропорційна ширині основного У НДІ "Квант - Радіолокація" розроблена техпелюстка діаграми спрямованості антени 1 в данічна та конструкторська документація, а також ному вибраному діапазоні частот і швидкості скавиготовлені діючі макети деяких пристроїв пасивнування простору. Середнє за одне сканування ної радіолокаційної станції. Відпрацювання технічантени 1 значення пеленгу ВО поступає на блок них рішень на макетах підтверджують технічні пеаналізу 14, перший блок обчислення відстані 7, реваги заявленої пасивної радіолокаційної станції пристрій індикації 6. На блок аналізу 14 поступанад найближчим аналогом. Фіг. 1 15 16 8961 Фіг. 2 І 2ї1 54І 35 36 L •пФіг. З Фіг. 4 ± • H .H > І 40 • 4І-І 41-N 42-1 42-N < t 50 • 51 Фіг. 5 ФІГ. 6 17 8961 18 Фіг. 7 Комп'ютерна верстка М. Мацело Підписне Тираж 26 прим. Міністерство освіти І науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український Інститут промислової власності", вул. Глазунова, 1, м. Київ - 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPassive radar for determining coordinates of above-water and air radiating objects
Автори англійськоюAndrusenko Mykola Ivanovych, Bilanovskyi Mykhailo Mykolaiovych, Віlусhеnко Ivan Fеdоrоvусh, Yena Hryhorii Оlекsаndrоvусh, Lipatov Valerii Pavlovych, Tolstykhin Mykola Viktorovych, Shovhun Vitalii Andriiovych
Назва патенту російськоюПассивная радиолокационная станция для определения координат надводных и воздушных излучающих объектов
Автори російськоюАндрусенко Николай Иванович, Билановский Михаил Николаевич, Биличенко Иван Федорович, Ена Григорий Александрович, Липатов Валерий Павлович, Толстихин Николай Викторович, Шовгун Виталий Андреевич
МПК / Мітки
Мітки: радіолокаційна, вимірювання, випромінюючих, носіїв, координат, повітряних, пасивна, станція, надводних, об'єктів
Код посилання
<a href="https://ua.patents.su/10-8961-pasivna-radiolokacijjna-stanciya-vimiryuvannya-koordinat-nosiv-nadvodnikh-ta-povitryanikh-viprominyuyuchikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об’єктів</a>
Пасивна станція вимірювання координат джерел випромінювання
Номер патенту: 37949
Опубліковано: 15.05.2001
Автор: Черниш Станіслав Костянтинович
Мітки: випромінювання, координат, пасивна, джерел, вимірювання, станція
Формула / Реферат:
Пасивна станція вимірювання координат джерел випромінювання містить в собі пеленгаторну станцію, блок обробки пеленгів прямого галсу (БОППГ), блок обробки пеленгів оберненого галсу (БОПОГ), блок визначення швидкості зміни пеленга (БВШЗП) і блок визначення дальності, які розміщені на рухомому носієві, перший і другий вихід пеленгаторної станції з'єднаний з входами БОППГ і БОПОГ, перший вихід якого е першим виходом пасивної станції, перший...
Пасивна станція вимірювання координат джерел випромінювання
Номер патенту: 52633
Опубліковано: 15.01.2003
Автор: Черниш Станіслав Костянтинович
МПК: G01S 5/06
Мітки: пасивна, станція, випромінювання, вимірювання, джерел, координат
Формула / Реферат:
Пасивна станція вимірювання координат джерел випромінювання, що містить пеленгаторну станцію, блок обробки пеленгів прямого галсу (БОППГ) і блок обробки пеленгів оберненого галсу (БОПОГ), які розміщені на рухомому носієві, перший і другий вихід пеленгаторної станції з'єднані відповідно з входом БОППГ і входом БОПОГ, вихід останнього є першим виходом станції, яка відрізняється тим, що у неї додатково введені блок визначення швидкості зміни...
Пасивна станція вимірювання координат джерел випромінювання
Номер патенту: 52649
Опубліковано: 15.01.2003
Автор: Черниш Станіслав Костянтинович
МПК: G01S 5/06
Мітки: станція, пасивна, випромінювання, вимірювання, джерел, координат
Формула / Реферат:
Пасивна станція вимірювання координат джерел випромінювання, що містить пеленгаторну станцію, блок обробки пеленгів прямого галсу (БОППГ) і блок обробки пеленгів оберненого галсу (БОПОГ), які розміщені на рухомому носієві, перший вихід пеленгаторної станції з'єднаний з входом БОППГ, яка відрізняється тим, що в неї додатково введені блок визначення швидкості зміни пеленга (БВШЗП), блок визначення дальності, схема порівняння, оперативний...
Пасивна система вимірювання координат джерел випромінювання
Номер патенту: 41466
Опубліковано: 17.09.2001
Автор: Черниш Станіслав Костянтинович
Мітки: вимірювання, випромінювання, джерел, система, пасивна, координат
Формула / Реферат:
Пасивна система вимірювання координат джерел випромінювання, що містить в собі декілька (як мінімум дві) просторово рознесених пеленгаторних станцій і центральний пост, з'єднаних двостороннім каналом зв'язку, вихід центрального поста є виходом системи, яка відрізняється тим, що введені додатково на кожну пеленгаторну станцію система єдиного часу (ЄЧ) і блок вимірювання періоду обертання антени (ВПОА), а в центральний пост введені додатково...
Пасивна система вимірювання координат джерел випромінювання
Номер патенту: 52632
Опубліковано: 15.01.2003
Автори: Єна Григорій Олександрович, Черниш Станіслав Костянтинович
МПК: G01S 5/04
Мітки: координат, випромінювання, джерел, система, вимірювання, пасивна
Формула / Реферат:
Пасивна система вимірювання координат джерел випромінювання, що містить щонайменше дві просторово рознесені пеленгаторні станції і центральний пост, з'єднані двостороннім зв'язком з каналом зв'язку, вихід центрального поста є виходом системи, яка відрізняється тим, що в неї додатково введені на кожну пеленгаторну станцію НВЧ комутатор, блок формування коду вхідних сигналів (БФКВС), блок формування цілі (БФЦ), дешифратор, постійний...
Попередній патент: Коробка для цукерок
Наступний патент: Машина етикетувальна
Випадковий патент: Спосіб лікування трематодозів