Спосіб оцінки сигналу та мобільна станція (варіанти)
Номер патенту: 85180
Опубліковано: 12.01.2009
Автори: Бланц Джозеф, Вей Юнбінь, Малладі Дурга Прасад



Формула / Реферат
1. Спосіб оцінки сигналу, що передається, у системі безпровідного зв'язку, який включає:
прийом безпровідного сигналу, який містить пілотний канал і щонайменше один інший канал;
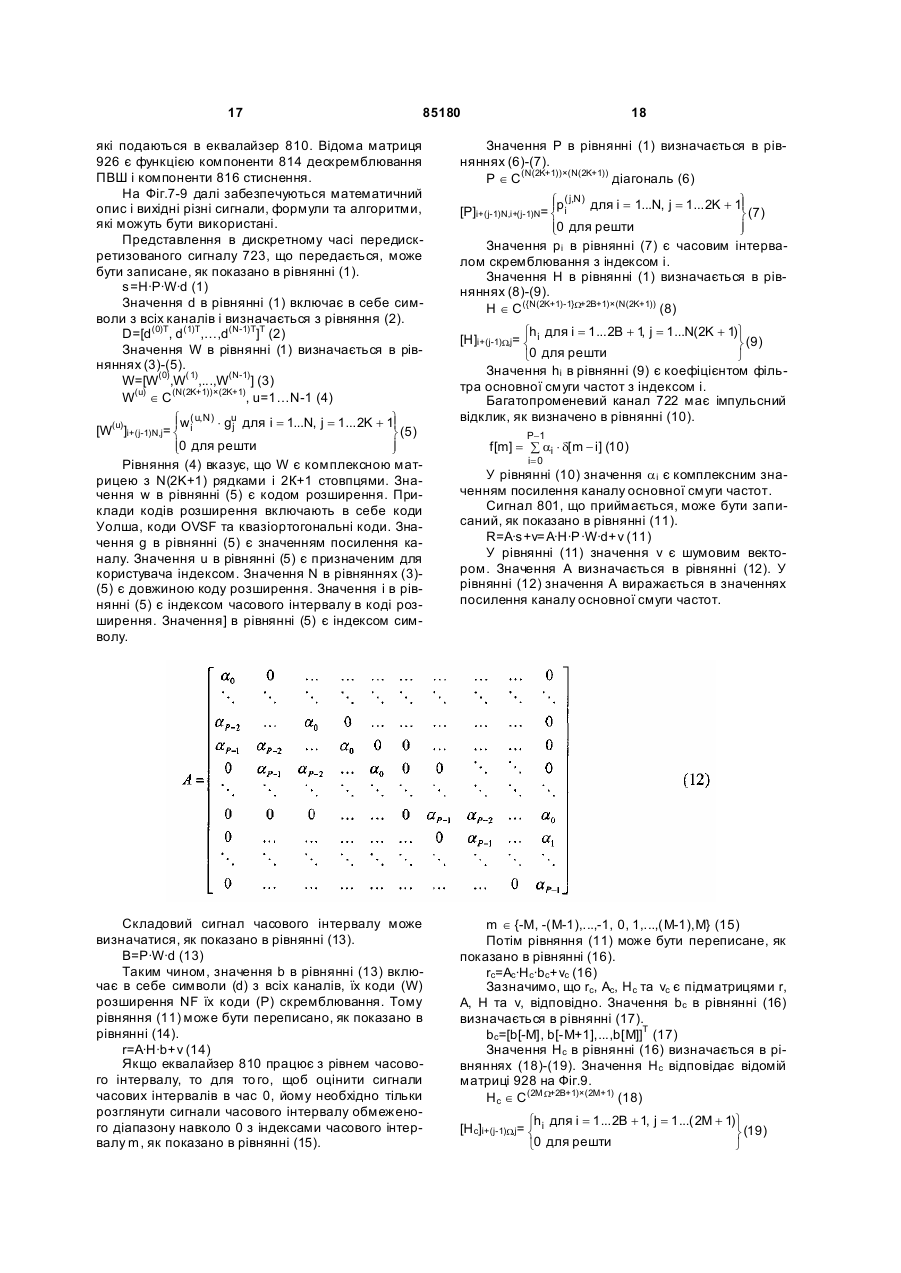
оцінку сигналу, що передається, за допомогою еквалайзера і прийом безпровідного сигналу, при цьому еквалайзер включає в себе фільтр з множиною відводів;
узгодження відводів через використання канальної оцінки, причому канальна оцінка обчислюється з пілотного каналу, і пілотний канал передається щонайменше з одним іншим каналом; і
розділення пілотного каналу і щонайменше одного іншого каналу.
2. Спосіб за п. 1, в якому узгодження відводів включає в себе обчислення нових вагових коефіцієнтів еквалайзера, які відповідають відводам.
3. Спосіб за п. 1, в якому шумова оцінка також використовується в ході узгодження відводів, а шумова оцінка обчислюється з пілотного каналу.
4. Спосіб за п. 3, в якому сигнал, що приймається, містить множину багатопроменевих сигналів, і канальна оцінка і шумова оцінка обчислюються з пілотних символів, що одержуються з більше ніж одного з множини багатопроменевих сигналів.
5. Спосіб за п. 1, в якому пілотний канал є ущільненим з розділенням за кодами.
6. Спосіб за п. 5, в якому безпровідний сигнал далі містить ортогональні та неортогональні канали.
7. Спосіб за п. 1, в якому спосіб здійснюється мобільною станцією.
8. Спосіб за п. 1, в якому спосіб здійснюється базовою станцією.
9. Спосіб за п. 1, в якому еквалайзер містить фільтр з кінцевою імпульсною характеристикою (КІХ).
10. Спосіб за п. 1, в якому еквалайзер містить фільтр з нескінченною імпульсною характеристикою (НІХ).
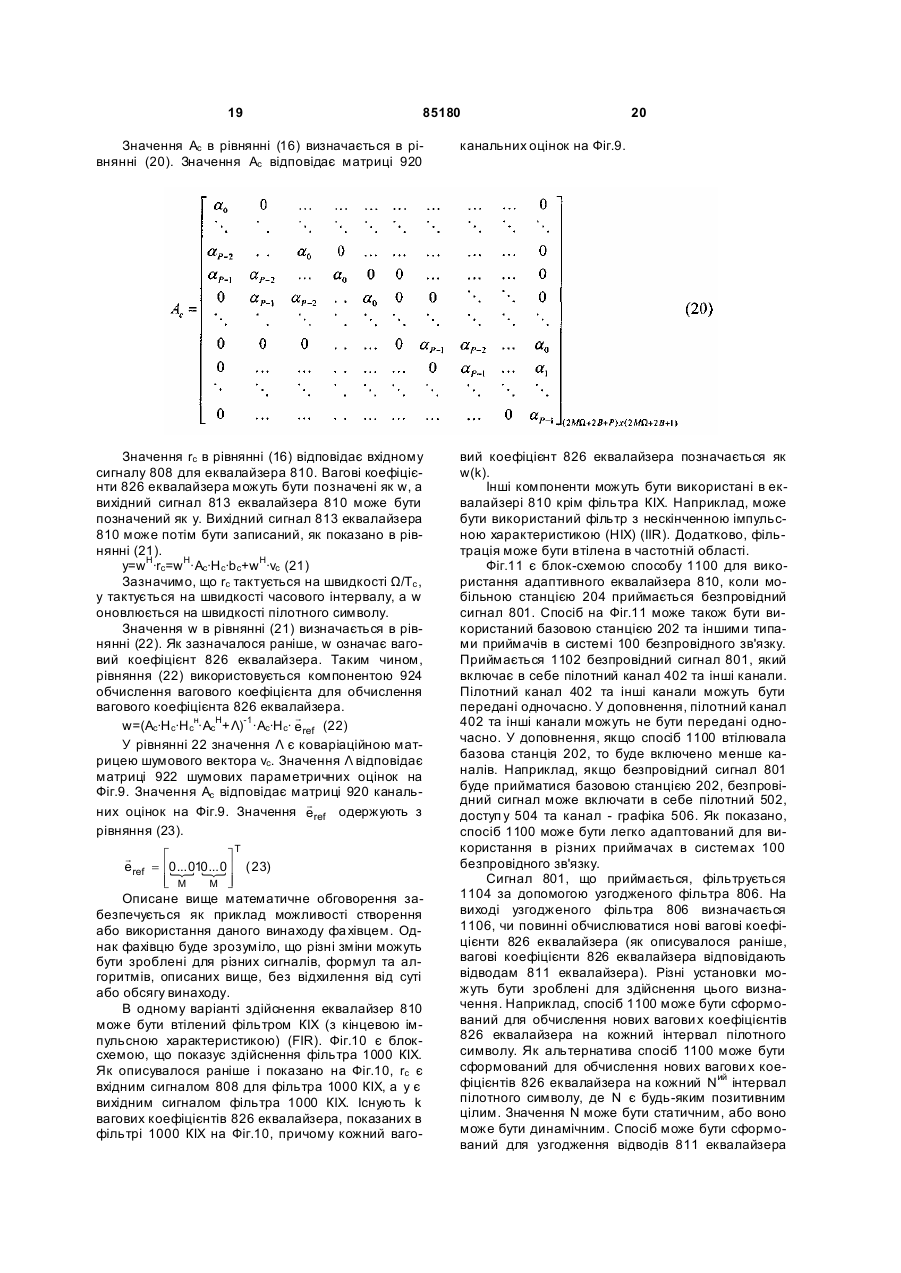
11. Спосіб за п. 1, в якому фільтрація здійснюється в частотній області.
12. Спосіб за п. 1, в якому відводи адаптуються на кожний інтервал пілотного символу.
13. Спосіб за п. 1, в якому відводи адаптуються на кожний Nий інтервал пілотного символу, де N є будь-яким позитивним цілим.
14. Спосіб за п. 1, в якому відводи адаптуються на N часових інтервалів кожного інтервалу пілотного символу, де N є будь-яким позитивним цілим.
15. Спосіб за п. 1, в якому відводи рівновіддалені один від одного.
16. Спосіб за п. 1, в якому відводи не рівновіддалені один від одного.
17. Спосіб за п. 1, в якому пілотний канал передається постійно.
18. Спосіб за п. 1, в якому пілотний канал не передається постійно.
19. Спосіб за п. 1, в якому щонайменше один інший канал передається постійно.
20. Спосіб за п. 1, в якому щонайменше один інший канал не передається постійно.
21. Спосіб за п. 1, в якому щонайменше один інший канал містить в собі канал трафіку.
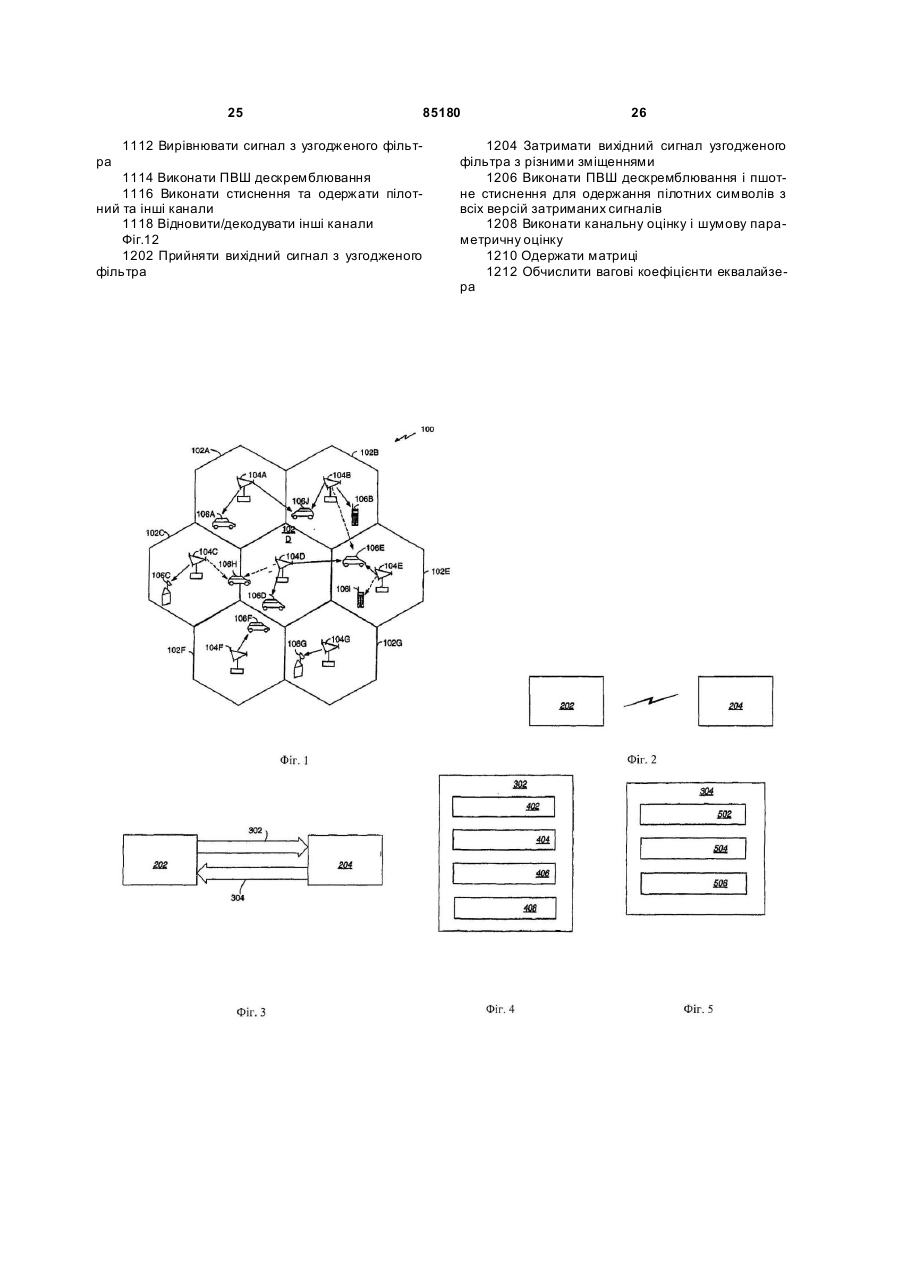
22. Мобільна станція для використання в системі безпровідного зв'язку, причому мобільна станція оцінює сигнал, що передається, яка містить:
щонайменше одну антену для прийому безпровідного сигналу, який містить пілотний канал і щонайменше один інший канал;
приймач в електричному зв'язку щонайменше з однією антеною;
еквалайзер для оцінювання сигналу, що передається, де еквалайзер включає в себе фільтр з множиною відводів;
адаптаційну компоненту еквалайзера для узгодження відводів через використання канальної оцінки, причому канальна оцінка обчислюється з пілотного каналу, і пілотний канал передається щонайменше з одним іншим каналом; і
компоненту для розділення пілотного каналу і щонайменше одного іншого каналу.
23. Мобільна станція за п. 22, в якій узгодження відводів містить в собі обчислення нових вагових коефіцієнтів еквалайзера, які відповідають відводам.
24. Мобільна станція за п. 22, в якій шумова оцінка також використовується в ході узгодження відводів, і шумова оцінка обчислюється з пілотного каналу.
25. Мобільна станція за п. 24, в якій сигнал, що приймається, містить множину багатопроменевих сигналів, а канальна оцінка та шумова оцінка обчислюються з пілотних символів, що одержуються з більше ніж одного з множини багатопроменевих сигналів.
26. Мобільна станція за п. 22, в якій еквалайзер містить фільтр з кінцевою імпульсною характеристикою (КІХ).
27. Мобільна станція за п. 22, в якій еквалайзер містить фільтр з нескінченною імпульсною характеристикою (НІХ).
28. Мобільна станція за п. 22, в якій фільтрація здійснюється в частотній області.
29. Мобільна станція за п. 22, в якій відводи адаптуються на кожний інтервал пілотного символу.
30. Мобільна станція за п. 22, в якій відводи адаптуються на кожний Nий інтервал пілотного символу, де N є будь-яким позитивним цілим.
31. Мобільна станція за п. 22, в якій відводи застосовуються на N часових інтервалів кожного інтервалу пілотного символу, де N є будь-яким позитивним цілим.
32. Мобільна станція за п. 22, в якій пілотний канал є ущільненим з кодовим розділенням.
33. Пристрій для оцінки сигналу, що передається для використання в системі безпровідного зв'язку, який містить:
щонайменше одну антену для прийому безпровідного сигналу, який містить пілотний канал і щонайменше один інший канал;
приймач в електричному зв'язку щонайменше з однією антеною;
еквалайзер для оцінювання сигналу, що передається, причому еквалайзер включає в себе фільтр з множиною відводів;
адаптаційну компоненту еквалайзера для узгодження відводів через використання канальної оцінки, причому канальна оцінка обчислюється з пілотного каналу, і пілотний канал включає в себе щонайменше один інший канал; і
компоненту для розділення пілотного каналу і щонайменше одного іншого каналу.
34. Пристрій за п. 33, в якому при узгодженні відводів обчислюються нові вагові коефіцієнти еквалайзера, які відповідають відводам.
35. Пристрій за п. 33, в якому шумова оцінка також використовується в ході узгодження відводів, і шумова оцінка обчислюється з пілотного каналу.
36. Пристрій за п. 35, в якому сигнал, що приймається, містить множину багатопроменевих сигналів, а канальна оцінка та шумова оцінка обчислюються з пілотних символів, що одержуються з більше ніж одного з множини багатопроменевих сигналів.
37. Пристрій за п. 33, в якому еквалайзер містить фільтр з кінцевою імпульсною характеристикою (КІХ).
38. Пристрій за п. 33, в якому еквалайзер містить фільтр з нескінченною імпульсною характеристикою (НІХ).
39. Пристрій за п. 33, в якому фільтрація здійснюється в частотній області.
40. Пристрій за п. 33, в якому відводи адаптуються на кожний інтервал пілотного символу.
41. Пристрій за п. 33, в якому відводи адаптуються на кожний Nий інтервал пілотного символу, де N є будь-яким позитивним цілим.
42. Пристрій за п. 33, в якому відводи адаптуються на N часових інтервалів кожного інтервалу пілотного символу, де N є будь-яким позитивним цілим.
43. Пристрій за п. 33, в якому пілотний канал є ущільненим з кодовим розділенням.
44. Пристрій за п. 33, в якому безпровідний сигнал, що приймається, передається по низхідній лінії, а пристрій використовується в мобільній станції системи безпровідного зв'язку.
45. Пристрій за п. 33, в якому сигнал, що приймається, передається по висхідній лінії, а пристрій використовується в базовій станції системи безпровідного зв'язку.
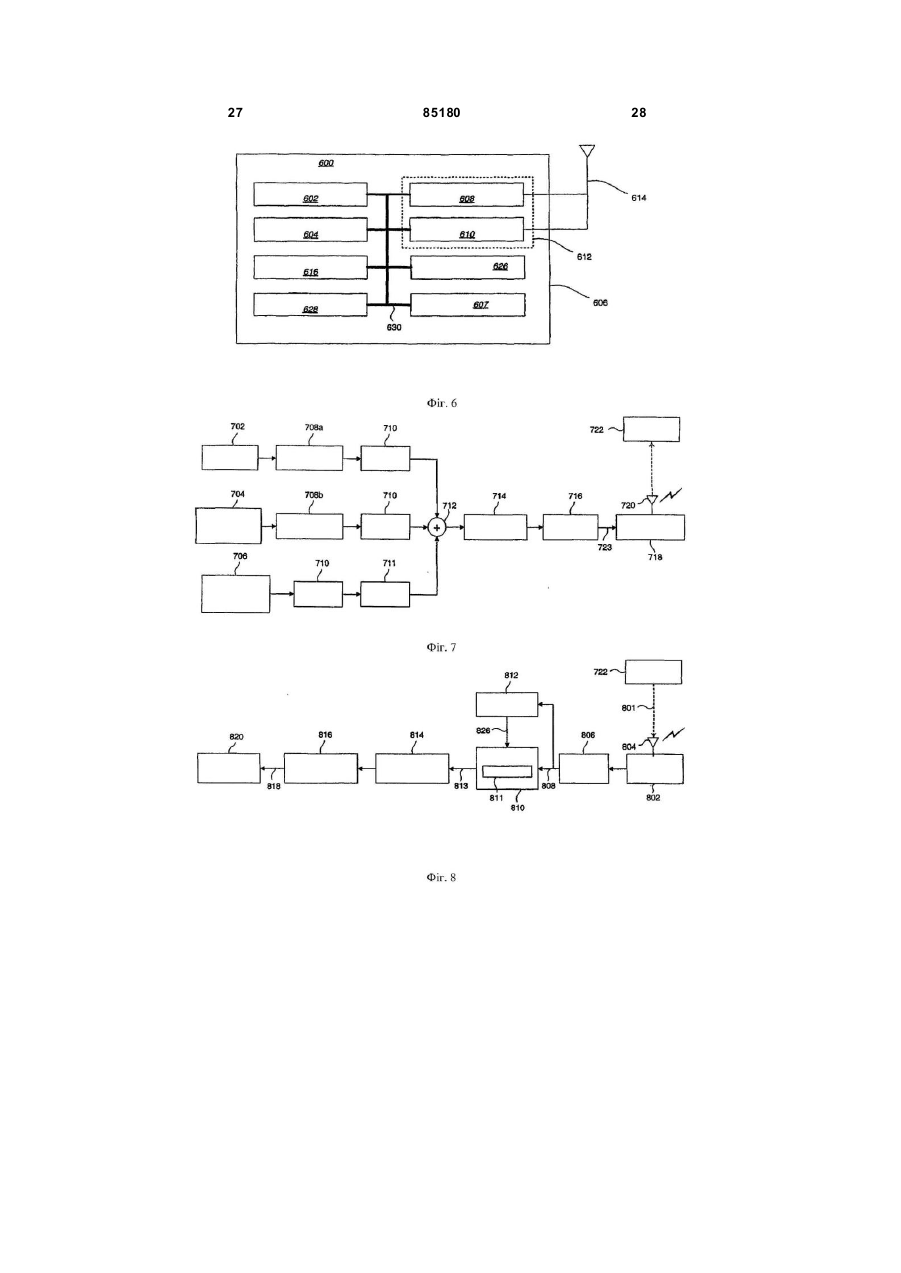
46. Мобільна станція для оцінки сигналу, що передається, для використання в системі безпровідного зв'язку, яка містить:
засіб для прийому безпровідного сигналу, який містить пілотний канал і щонайменше один інший канал;
засіб для оцінювання сигналу, що передається, причому засіб оцінки включає в себе множину відводів;
засіб для узгодження відводів через використання канальної оцінки, причому канальна оцінка обчислюється з пілотного каналу, і пілотний канал включає в себе щонайменше один інший канал; і
засіб для розділення пілотного каналу і щонайменше одного іншого каналу.
Текст
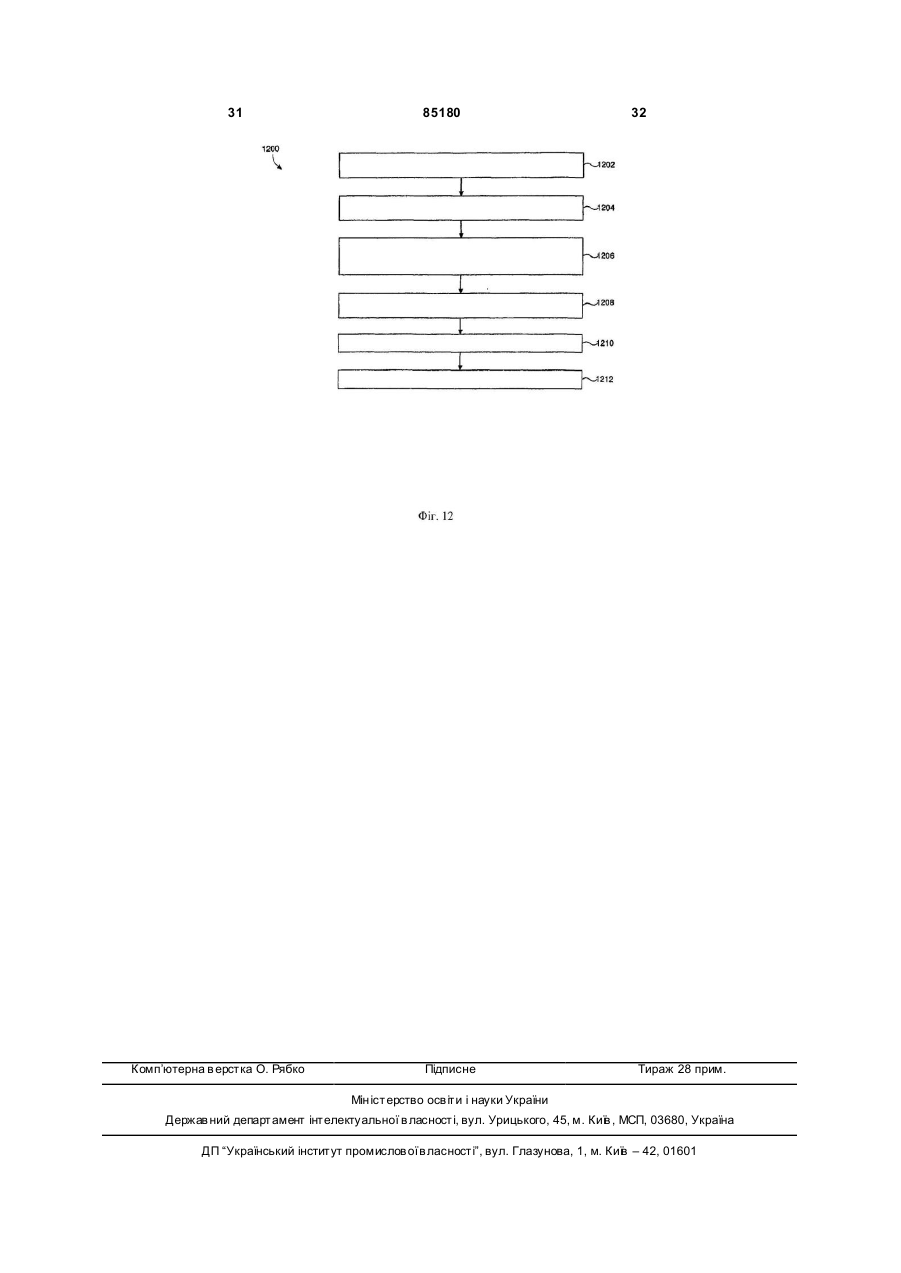
1. Спосіб оцінки сигналу, що передається, у системі безпровідного зв'язку, який включає: прийом безпровідного сигналу, який містить пілотний канал і щонайменше один інший канал; оцінку сигналу, що передається, за допомогою еквалайзера і прийом безпровідного сигналу, при цьому еквалайзер включає в себе фільтр з множиною відводів; узгодження відводів через використання канальної оцінки, причому канальна оцінка обчислюється з пілотного каналу, і пілотний канал передається щонайменше з одним іншим каналом; і розділення пілотного каналу і щонайменше одного іншого каналу. 2. Спосіб за п. 1, в якому узгодження відводів включає в себе обчислення нових вагових коефіцієнтів еквалайзера, які відповідають 3. Спосіб відводам. за п. 1, в якому шумова оцінка також використовується в ході узгодження відводів, а шумова оцінка обчислюється з пілотного каналу. 4. Спосіб за п. 3, в якому сигнал, що приймається, містить множину багатопроменевих сигналів, і канальна оцінка і шумова оцінка обчислюються з пілотних символів, що одержуються з більше ніж одного з множини багатопроменевих сигналів. 5. Спосіб за п. 1, в якому пілотний канал є ущільненим з розділенням за кодами. 6. Спосіб за п. 5, в якому безпровідний сигнал далі містить ортогональні та неортогональні канали. 7. Спосіб за п. 1, в якому спосіб здійснюється мобільною станцією. 2 (19) 1 3 85180 4 пілотного каналу, і пілотний канал передається щонайменше з одним іншим каналом; і компоненту для розділення пілотного каналу і щонайменше одного іншого каналу. 23. Мобільна станція за п. 22, в якій узгодження відводів містить в собі обчислення нових вагових коефіцієнтів еквалайзера, які відповідають відводам. 24. Мобільна станція за п. 22, в якій шумова оцінка також використовується в ході узгодження відводів, і шумова оцінка обчислюється з пілотного каналу. 25. Мобільна станція за п. 24, в якій сигнал, що приймається, містить множину багатопроменевих сигналів, а канальна оцінка та шумова оцінка обчислюються з пілотних символів, що одержуються з більше ніж одного з множини багатопроменевих сигналів. 26. Мобільна станція за п. 22, в якій еквалайзер містить фільтр з кінцевою імпульсною характеристикою (КІХ). 27. Мобільна станція за п. 22, в якій еквалайзер містить фільтр з нескінченною імпульсною характеристикою (НІХ). 28. Мобільна станція за п. 22, в якій фільтрація здійснюється в частотній області. 29. Мобільна станція за п. 22, в якій відводи адаптуються на кожний інтервал пілотного символу. 30. Мобільна станція за п. 22, в якій відводи адаптуються на кожний Nий інтервал пілотного символу, де N є будь-яким позитивним цілим. 31. Мобільна станція за п. 22, в якій відводи застосовуються на N часових інтервалів кожного інтервалу пілотного символу, де N є будь-яким позитивним цілим. 32. Мобільна станція за п. 22, в якій пілотний канал є ущільненим з кодовим розділенням. 33. Пристрій для оцінки сигналу, що передається для використання в системі безпровідного зв'язку, який містить: щонайменше одну антену для прийому безпровідного сигналу, який містить пілотний канал і щонайменше один інший канал; приймач в електричному зв'язку щонайменше з однією антеною; еквалайзер для оцінювання сигналу, що передається, причому еквалайзер включає в себе фільтр з множиною відводів; адаптаційну компоненту еквалайзера для узгодження відводів через використання канальної оцінки, причому канальна оцінка обчислюється з пілотного каналу, і пілотний канал включає в себе щонайменше один інший канал; і компоненту для розділення пілотного каналу і щонайменше одного іншого каналу. 34. Пристрій за п. 33, в якому при узгодженні відводів обчислюються нові вагові коефіцієнти еквалайзера, які відповідають відводам. 35. Пристрій за п. 33, в якому шумова оцінка також використовується в ході узгодження відводів, і шумова оцінка обчислюється з пілотного каналу. 36. Пристрій за п. 35, в якому сигнал, що приймається, містить множину багатопроменевих сигналів, а канальна оцінка та шумова оцінка обчислюються з пілотних символів, що одержуються з більше ніж одного з множини багатопроменевих сигналів. 37. Пристрій за п. 33, в якому еквалайзер містить фільтр з кінцевою імпульсною характеристикою (КІХ). 38. Пристрій за п. 33, в якому еквалайзер містить фільтр з нескінченною імпульсною характеристикою (НІХ). 39. Пристрій за п. 33, в якому фільтрація здійснюється в частотній області. 40. Пристрій за п. 33, в якому відводи адаптуються на кожний інтервал пілотного символу. 41. Пристрій за п. 33, в якому відводи адаптуються на кожний Nий інтервал пілотного символу, де N є будь-яким позитивним цілим. 42. Пристрій за п. 33, в якому відводи адаптуються на N часових інтервалів кожного інтервалу пілотного символу, де N є будь-яким позитивним цілим. 43. Пристрій за п. 33, в якому пілотний канал є ущільненим з кодовим розділенням. 44. Пристрій за п. 33, в якому безпровідний сигнал, що приймається, передається по низхідній лінії, а пристрій використовується в мобільній станції системи безпровідного зв'язку. 45. Пристрій за п. 33, в якому сигнал, що приймається, передається по висхідній лінії, а пристрій використовується в базовій станції системи безпровідного зв'язку. 46. Мобільна станція для оцінки сигналу, що передається, для використання в системі безпровідного зв'язку, яка містить: засіб для прийому безпровідного сигналу, який містить пілотний канал і щонайменше один інший канал; засіб для оцінювання сигналу, що передається, причому засіб оцінки включає в себе множину відводів; засіб для узгодження відводів через використання канальної оцінки, причому канальна оцінка обчислюється з пілотного каналу, і пілотний канал включає в себе щонайменше один інший канал; і засіб для розділення пілотного каналу і щонайменше одного іншого каналу. Даний винахід відноситься загалом до вирівнювання в системах зв'язку і, конкретніше, до адаптивного еквалайзера для використання з системами безпровідного зв'язку. Системи зв'язку використовуються для передачі інформації від одного пристрою іншому. До передачі інформація кодується в формат, придат ний для передачі по каналу зв'язку. Сигнал, що передається, спотворюється, доки він передається через канал зв'язку; сигнал також відчуває погіршення через шум та інтерференцію, що набувається протягом передачі. Одним з ефектів, який створює спотворення сигналу, є багатопроменеве поширення. Багато 5 85180 променеві сигнали мають різні версії одного і того самого безпровідного сигналу, які створюються відбиттями від будівель та природних утворень. Багатопроменеві сигнали можуть мати фазові зсуви, які викликають гасіння один одного сигналами з деяких місцеположень. Втрата сигналу через фазове гасіння багатопроменевих сигналів відома як завмирання. Завмирання є проблемою в безпровідних системах, оскільки воно руйнує зв'язки користувача. Наприклад, декілька багатопроменевих копій єдиного безпровідного сигналу, що передається пристроєм безпровідного зв'язку, можуть створюватися відбиттям від дерев та будівель. Ці багатопроменеві копії можуть об'єднуватися і руйнувати одна одну через фазове зміщення. Іншою проблемою, яка може впливати на сигнал, є недостатнє відношення сигнал-шум. Відношення сигнал-шум (С/Ш) ("SNR") представляє потужність сигналу по відношенню до оточуючого шуму. Достатнє С/Ш необхідно підтримувати так, щоб сигнал міг бути виділений з шуму. Приклад інтерференції, що звичайно зустрічається в обмежених по смузі частот каналах, називається міжсимвольною інтерференцією (MCI) (ISI). МСІ виникає як результат розширення символьного імпульсу, що передається через дисперсійну природу каналу, що призводить до перекриття суміжних символьних імпульсів. Дисперсійна природа каналу є наслідком багатопроменевого поширення. Сигнал, що приймається, декодується і переводиться в первинну форму до кодування. І приймач, і передавач проектуються для мінімізування ефектів канальних дефектів та інтерференції. Для компенсації шуму та інтерференції, що одержується передавачем і каналом, можуть бути втілені різні конструкції приймачів. Як приклад, еквалайзер є загальним вибором для поводження з багатопроменевістю, МСІ і для поліпшення С/Ш. Еквалайзер коректує спотворення і генерує оцінку символу, що передається. У безпровідному середовищі еквалайзери потрібні для керування змінними в часі станами каналу. В ідеалі, відклик еквалайзера регулюється відповідно до змін в характеристиках каналу. Здатність еквалайзера відповідати на зміни станів відноситься до адаптаційних здатностей еквалайзера. Оптимізація еквалайзера складна, оскільки це вимагає врівноважування конкуруючи х цілей. Тому існує необхідність в створенні еквалайзера, який оптимізує роботу для різних систем та станів. Фіг.1 є діаграмою системи зв'язку з розширеним спектром, яка підтримує декількох користувачів; Фіг.2 є блок-схемою базової станції та мобільної станції в системі зв'язку; Фіг.3 є блок-схемою, що показує низхідну лінію та висхідну лінію між базовою станцією та мобільною станцією; Фіг.4 є блок-схемою каналів у варіанті здійснення низхідної лінії; Фіг.5 є блок-схемою каналів у варіанті здійснення висхідної лінії; 6 Фіг.6 є блок-схемою варіанта здійснення абонентського блока; Фіг.7 є функціональною блок-схемою, що показує передачу безпровідного сигналу; Фіг.8 є функціональною блок-схемою, що показує прийом безпровідного сигналу; Фіг.9 є функціональною блок-схемою варіанта здійснення адаптаційної компоненти еквалайзера; Фіг.10 є блок-схемою, що показує виконання фільтра КІХ (з кінцевою з імпульсною характеристикою) (FIR). Фіг.11 є блок-схемою алгоритму, що показує спосіб для використання адаптивного еквалайзера, коли приймається безпровідний сигнал мобільною станцією; і Фіг.12 є блок-схемою алгоритму способу для обчислення нових вагови х коефіцієнтів еквалайзера. У системі безпровідного зв'язку розкривається спосіб оцінки сигналу, що передається. Приймається безпровідний сигнал, який включає в себе пілотний канал і щонайменше один інший канал. Сигнал, що приймається, оцінюється за допомогою еквалайзера та безпровідного сигналу, що приймається. Виходи фільтра еквалайзера настроюються через використання канальної оцінки. Канальна оцінка обчислюється з пілотного каналу. Пілотний канал і щонайменше один інший канал розділяються. Еквалайзер включає в себе множину відводів. У деяких варіантах здійснення адаптація відводів включає в себе обчислення нових вагови х коефіцієнтів еквалайзера, які відповідають відводам. Канальна оцінка використовується протягом адаптації відводів. Канальна оцінка обчислюється з пілотного каналу, яка включає в себе щонайменше один інший канал. Шумова оцінка може бути також використана протягом адаптації відводів. Шумова оцінка також обчислюється з пілотного каналу. У деяких варіантах здійснення сигнал, що приймається, включає в себе множину багатопроменевих сигналів, а канальна оцінка і шумова оцінка обчислюються з пілотних символів, що одержуються щонайменше з деяких багатопроменевих сигналів. Спосіб може бути втілений в різноманітних зв'язувальних приймачах. Наприклад, спосіб може бути втілений в мобільній станції. Спосіб може бути також втілений базовою станцією. Цифровий фільтр може бути використаний для здійснення еквалайзера. Один можливий цифровий фільтр може бути використаний як фільтр КІХ (з кінцевою імпульсною характеристикою) (FIR). Може бути також використаний НІХ фільтр (з нескінченною імпульсною характеристикою) (IIR). Додатково, фільтрація може виконуватися в частотній області. У деяких варіантах здійснення відводи можуть бути настроєні один раз на кожний інтервал пілотного символу. Відводи можуть бути настроєні на N часових інтервалів на кожний інтервал пілотного символу, де N є будь-яким позитивним цілим. В інших варіантах здійснення відводи можуть бути настроєні на кожний Nий інтервал пілотного символу, де N є будь-яким позитивним цілим. 7 85180 Розкривається також мобільна станція для використання в системі безпровідного зв'язку. Мобільна станція включає в себе адаптивний еквалайзер для оцінки сигналу, що передається. Мобільна станція включає в себе щонайменше одну антену для прийому безпровідного сигналу і приймач в електричному зв'язку щонайменше з однією антеною. Еквалайзер оцінює сигнал, що передається. Еквалайзер включає в себе множину відводів. Канальна оцінка використовується протягом настройки відводів. Канальна оцінка обчислюється з пілотного каналу, який був включений щонайменше в один інший канал. Мобільна станція також включає в себе компоненту для розділення пілотного каналу і щонайменше одного іншого каналу. Компоненти мобільної станції також застосовні і можуть використовуватися з іншими приймальними системами. Загалом також розкривається пристрій для використання в системі безпровідного зв'язку, яка включає в себе адаптивний еквалайзер для оцінки сигналу, що передається. Цей пристрій може бути втілений в мобільній станції, в базовій станції або в будь-якій іншій системі, якій потрібно приймати та обробляти безпровідний сигнал. Системи та способи, описані тут, можуть використовуватися для компенсації багатопроменевого поширення. Багатопроменеві сигнали являють собою різні версії одного і того ж самого безпровідного сигналу, які створюються відбиттями від будівель та природних утворень. Багатопроменеві сигнали можуть мати фазові зсуви, які викликають погашення сигналами один одного з деяких місцеположень. Втрата сигналу через фазове гасіння багатопроменевих сигналів відома як завмирання. Завмирання є проблемою в безпровідних системах, оскільки воно руйнує зв'язки користувача. Наприклад, декілька багатопроменевих копій єдиного безпровідного сигналу, які передаються пристроєм безпровідного зв'язку, можуть створюватися відбиттям від дерев та будівель. Ці багатопроменеві копії можуть об'єднуватися або руйнува ти одна одну через фазове зміщення. Розкриті тут системи та способи можуть також бути корисні в оптимізації потужності, що використовується в системі зв'язку. Системи МДКР одержують користь від використання керування потужністю. Достатнє С/Ш повинно підтримуватися так, щоб сигнал міг бути відділений від шуму. Оскільки сигнали МДКР не розділяються за частотою або часом для даної лінії зв'язку, шумова компонента відношення включає в себе всі інші сигнали МДКР, що приймаються. Якщо потужність окремого сигналу МДКР є дуже високою, він ефективно заглушає всі інші сигнали МДКР. Кер ування потужністю використовується у висхідному каналі (передача від термінала до базової станції) та в низхідному каналі (передача від базової станції до термінала). У висхідному каналі керування потужністю використовується для підтримки відповідного рівня потужності для всіх сигналів користувача, що приймаються базовою станцією. Рівень потужності цих сигналів МДКР, що приймаються, повинен бути мінімізований, але все ж повинен бути досить потужним для підтримки відповідної С/Ш. У низхід 8 ному каналі керування потужністю використовується для підтримки відповідного рівня потужності для всіх сигналів, що приймаються різними терміналами. Це мінімізує інтерференцію між користувачами в одному й тому самому стільнику через багатопроменеві сигнали. Це також мінімізує інтерференцію між користувачами в суміжних стільниках. Системи МДКР динамічно керують потужністю передачі базової станції, а термінали підтримують відповідний рівень потужності у висхідному каналі та низхідному каналі. Динамічне керування застосовується через способи керування без зворотного зв'язку та зі зворотним зв'язком, які відомі в промисловості. Дальність дії системи МДКР безпосередньо відноситься до загального рівня потужності сигналів, що приймаються, оскільки кожний додатковий сигнал додає шум до всіх інши х сигналів. Шумова компонента С/Ш користувача зменшується, коли зменшується середній рівень потужності, що приймається. Методи, які зменшують потужність сигналу МДКР в пристрої зв'язку, безпосередньо збільшують дальність дії системи МДКР. Рознесення прийому є одним способом для мінімізації необхідної потужності сигналу. Більш низька потужність сигналу також зменшує вартість пристроїв зв'язку користувача при збільшенні терміну служби акумулятора, а також дальності дії. Оптимізація потужності, що використовується, може мати додаткові переваги в системах з високою швидкістю передачі даних, коли можуть підтримуватися тільки високі швидкості передачі даних, якщо може бути досягнуте відповідне С/Ш. Для передачі інформації від одного пристрою іншому використовуються системи зв'язку. До передачі інформація кодується в формат, придатний для передачі по каналу зв'язку. Канал зв'язку може бути лінією передачі або вільним простором між передавачем та приймачем. Оскільки сигнал поширюється по каналу, сигнал, що передається, спотворюється через дефекти каналу. Більше того, сигнал зазнає деградації через шум та інтерференцію, що набувається протягом передачі. Прикладом інтерференції, що звичайно зустрічається в каналах з обмеженою смугою частот, є міжсимвольна інтерференція (MCI) (ISI). МСІ виникає як результат розширення символьного імпульсу, що передається, через дисперсійну природу каналу, що призводить до перекриття суміжних символьних імпульсів. Дисперсійна природа каналу є наслідком багатопроменевого поширення. У приймачі сигнал обробляється і переводиться в первинну форму до кодування. І приймач, і передавач спроектовані для мінімізування ефектів канальних дефектів та інтерференції. Різноманітні конструкції приймачів можуть бути втілені для компенсації інтерференції та шуму, що спричиняються передавачем і каналом. У цьому прикладі еквалайзер є загальним вибором для розгляду цих проблем. Еквалайзер може бути втілений за допомогою трансверсального фільтра, тобто лінії затримки з Т-секундними відводами (де Τ є часовим розділенням фільтра еквалайзера) Вміст відводів оцінюється і підсумовується для утворення оцінки символу, що передається. Кое 9 85180 фіцієнти відводів регулюються для компенсації змін в радіоканалі. Сигнали зв'язуються з канальним розділовим пристроєм, таким як дескремблер/стискач, і з пристроєм прийняття рішення, такого як декодер або роздільник на символи. Здатність приймача виявляти сигнал в присутності шуму базується на відношенні потужності сигналу, що приймається, і потужності шуму, звичайно відомим як С/Ш або відношення несуча/інтерференція (Н/І). Промислове використання цих термінів або подібних термінів часто взаємозамінне, однак означають вони одне і те ж саме. Відповідно, будь-яке посилання тут для Н/І буде зрозуміле фахівцю для здійснення широкого представлення зміни ефектів шуму в різних точках в системі зв'язку. Еквалайзери в системах безпровідного зв'язку проектуються для регулювання змінних у часі станів каналу. По мірі зміни канальних характеристик еквалайзер відповідно регулює свою відповідь. Такі зміни можуть включати в себе зміни в носії поширення або відносне пересування передавача та приймача, а також інші стани. Еквалайзери, які адаптовані до змінних в часі станів каналу, звичайно відносяться до адаптивних еквалайзерів. Слово "зразкове" використовується тут виключно для позначення "такий, що служить як приклад, варіант або ілюстрація". Будь-який варіант здійснення, описаний тут як "зразковий", не треба обов'язково тлумачити як найкращій або переважний по відношенню до інших варіантів здійснення. Хоча різні аспекти варіантів здійснення представлені на кресленнях, ці креслення не є необхідними зображеннями для співставлення, за винятком спеціально відображених. Подальше обговорення розвиває зразкові варіанти здійснення приймача зв'язку з адаптивним еквалайзером шляхом обговорення спочатку системи безпровідного зв'язку з розширеним спектром. Потім обговорюються базова станція та мобільна станція, а також зв'язок між ними. Потім показані компоненти варіанта здійснення абонентського блока. Функціональні блок-схеми показані та описані відносно передачі та прийому безпровідного сигналу. Викладаються також деталі, що стосуються адаптації еквалайзера в приймальній системі. В опис включені також ілюстрації та математичні висновки відносно обробки сигналу. Потім обговорюються зразкові способи використання та адаптації еквалайзера. Зазначимо, що зразковий варіант здійснення забезпечується як зразковий у всьому цьому обговоренні; однак альтернативні варіанти здійснення можуть включати в себе різні аспекти без виходу за обсяг даного винаходу. Зокрема, даний винахід застосовний до системи обробки даних, системи безпровідного зв'язку, мобільної мережі ІП (IP) (Інтернет протоколу) і будь-якої іншої системи, що вимагає прийому та обробки безпровідного сигналу. Зразковий варіант здійснення використовує систему безпровідного зв'язку з розширеним спектром. Системи безпровідного зв'язку широко застосовуються для забезпечення різних видів зв'язку, таких як мовна передача, передача даних і так 10 далі. Ці системи можуть базуватися на множинному доступі з кодовим розділенням каналів (МДКР) (CDMA), множинному доступі з часовим розділенням каналів (МДЧР) (TDMA) або деяких інших методах модуляції. Система МДКР забезпечує певні переваги перед іншими типами систем, зокрема із збільшеною пропускною здатністю. Система може бути створена для підтримки одного або декількох стандартів, таких як "Стандарт сумісності мобільної станції - базової станції TIA/EIA/IS-95-B для дворежимної широкосмугової стільникової системи з розширеним спектром", що іменується тут як стандарт IS-95, стандарт, запропонований консорціумом, який називають "3rd Generation Partnership Project" ("Проект співробітництва третього покоління"), що іменується тут як 3GPP і втілений в наборі документів, що включає в себе документи №№ 3GPP TS 25.211, 3GPP TS 25.212, 3GPP TS 25.213, 3GPP TS 25.214 та 3GPP TS 25.302, який називають тут як стандарт ШМДКР (Широкосмуговий МДКР) (W-CDMA), стандарт, запропонований консорціумом, який називається "3rd Generation Partnership Project 2" ("Проект-2 співробітництва третього покоління"), що іменується тут як 3GPP2, і стандарт TR-45.5, що іменується тут як стандарт cdma2000, що раніше називався IS-2000 МС. Стандарти, процитовані вище, є, таким чином, навмисно введеними сюди за допомогою посилання. Кожний стандарт конкретно визначає обробку даних для передачі від базової станції до мобільної станції і навпаки. Як зразковий варіант здійснення подальше обговорення розглядає систему зв'язку з розширеним спектром, сумісну з протоколами стандарту cdma2000. Альтернативні варіанти здійснення можуть включати в себе інший стандарт. Системи та способи, описані тут, можуть бути використані в системах зв'язку з високою швидкістю передачі даних. Далі по всьому обговоренню описується для розуміння конкретна система з високою швидкістю передачі даних. Можуть бути здійснені також альтернативні системи, які забезпечують передачу інформації на високих швидкостях передачі даних. Для систем зв'язку МДКР, створених для передачі на високих швидкостях передачі даних, таких як система зв'язку високої швидкості передачі даних (ВШП) (HDR), для передачі на максимальній швидкості передачі даних може бути використана схема запиту змінної швидкості передачі даних, яка може підтримувати Н/І. Система зв'язку ВШП звичайно створюється для узгодження з одним або декількома стандартами, такими як "cdma2000 High Rate Packet Data Air Interface Specification", 3GPP2 C.S0024, версії 2, 27 жовтня 2000, що поширюється консорціумом "3rd Generation Partnership Project 2". Зміст вищезазначеного стандарту включений сюди за допомогою посилання. Приймач в зразковій системі зв'язку ВШП може використовувати схему запиту змінної швидкості передачі даних. Приймач може бути реалізований на абонентській станції, зв'язаній з наземною мережею передачі даних шляхом передачі даних по висхідній лінії до базової станції (показано ниж 11 85180 че). Базова станція приймає ці дані і передає дані через контролер базової станції (КБС) (BSC) (не показаний) до наземної мережі. Навпаки, передачі до абонентської станції можуть пройти з наземної мережі до базової станції через КБС і передаватися з базової станції абонентському блоку по низхідній лінії. Фіг.1 служить прикладом системи 100 зв'язку, яка підтримує деяку кількість користувачів і здатна втілювати щонайменше деякі аспекти варіантів здійснення, описаних тут. Будь-які види алгоритмів та способів можуть бути використані для планування передач в системі 100. Система 100 забезпечує зв'язок для декількох стільників 102A-102G, кожна з яких обслуговується відповідною базовою станцією 104A-104G, відповідно. У зразковому варіанті здійснення деякі базові станції 104 мають множину приймальних антен, а інші мають тільки одну приймальну антену. Подібним чином деякі базові станції 104 мають множину передавальних антен, а інші мають єдину передавальну антену. Не існує обмежень на комбінації передавальних антен та приймальних антен. Тому базова станція 104 може мати множину передавальних антен та єдину приймальну антену, або мати множину приймальних антен та єдину передавальну антену, або мати єдину передавальну та приймальну антени або множину передавальних та приймальних антен. Термінали 106 в ділянці покриття можуть бути нерухомі (тобто стаціонарні) або рухомі. Як показано на Фіг.1, різні термінали 106 розподіляються по всій системі. Кожний термінал 106 зв'язується щонайменше з одною ("Проект співробітництва третього покоління"), а можливо - з множиною базових станцій 104 по низхідній лінії та висхідній лінії в даний момент залежно від того, наприклад, чи використовується м'яка передача керування, або термінал призначений і працює для (одночасного або послідовного) прийому множини передач від множини базових станцій. М'яка передача керування в системах зв'язку МДКР добре відома з рівня техніки і детально описується в патенті США №5101501, озаглавленому "Спосіб та система для забезпечення м'якої передачі керування в стільниковій телефонній системі МДКР", права на який належать заявнику даного винаходу. Низхідна лінія відноситься до передачі від базової станції 104 до термінала 106, а висхідна лінія відноситься до передачі від термінала 106 до базової станції 104. У зразковому варіанті здійснення деякі термінали 106 мають множину приймальних антен, а інші мають тільки одну приймальну антену. На Фіг.1 базова станція 104А передає дані терміналам 106А та 106J по низхідній лінії, базова станція 104В передає дані терміналам 106В та 106J, базова станція 104С передає дані терміналу 106С тощо. Фіг.2 є блок-схемою базової станції 202 та мобільної станції 204 в системі 100 зв'язку. Базова станція 202 має безпровідний зв'язок з мобільною станцією 204. Як описується вище, базова станція 202 передає сигнали до мобільних станцій 204, які приймають ці сигнали. У доповнення до цього, 12 мобільні станції 204 можуть також передавати сигнали до базової станції 202. Фіг.3 є блок-схемою базової станції 202 та мобільної станції 204, що показує низхідну лінію 302 та висхідну лінію 304. Низхідна лінія 302 відноситься до передачі від базової станції 202 до мобільної станції, а висхідна лінія 304 відноситься до передачі від мобільної станції 204 до базової станції 202. Фіг.4 є блок-схемою каналів у варіанті здійснення низхідної лінії 302. Низхідна лінія 302 включає в себе пілотний канал 402, канал 404 синхронізації, пейджинговий канал 406 та канал 408 трафіка. Показана низхідна лінія 302 є тільки одним можливим варіантом здійснення низхідної лінії 302, і треба розуміти, що інші канали можуть додаватися або видалятися з низхідної лінії 302. За одним стандартом МДКР, описаним в стандарті сумісності мобільна станція - базова станція для дворежимної широкосмугової стільникової системи з розширеним спектром TIA/EIA/IS-95-A Асоціації індустрії телезв'язку, кожна базова станція 202 передає своїм користувачам пілотний канал 402, канал 404 синхронізації, пейджинговий канал 406 і прямий канал 408 трафіка. Пілотний канал 402 є немодульованим сигналом прямої послідовності з розширеним спектром, що передається безперервно кожною базовою станцією 202. Пілотний канал 402 дозволяє кожному користувачу одержувати тактування в каналах, що передаються базовою станцією 202, і забезпечує еталон для когерентної демодуляції. Пілотний канал 402 також забезпечує засіб для порівняння інтенсивності сигналу між базовими станціями 202 для визначення того, коли треба зробити м'яку передачу керування (таку, як при пересуванні між стільниками 102) між базовими станціями 202. Канал 404 синхронізації передає інформацію тактування і конфігурації системи мобільної станції 204. Пейджинговий канал 406 використовується для зв'язку з мобільними станціями 204, коли вони не призначаються каналу 408 трафіка. Пейджинговий канал 406 використовується для передачі сторінок, тобто повідомлень викликів, що поступають, до мобільних станцій 204. Канал 408 трафіка використовується для передачі даних і мови користувача. Повідомлення сигналізації також посилаються по каналу 408 трафіка. Фіг.5 є блок-схемою каналів у варіанті здійснення висхідної лінії 304. Висхідна лінія 304 може включати в себе пілотний канал 502, канал 504 доступ у і канал 506 трафіка. Показана висхідна лінія 304 є тільки одним можливим варіантом здійснення висхідної лінії, і потрібно розуміти, що інші канали можуть бути додані або видалені з висхідної лінії 304. Висхідна лінія 304 за Фіг.5 включає в себе пілотний канал 502. Запропонований повторний виклик цих систем безпровідного радіотелефонного зв'язку третього покоління (3G), в якому використовується висхідна лінія 304 пілотного каналу 502. Наприклад, в нині запропонованому стандарті cdma2000 мобільна станція 204 передає пілотний канал зворотної лінії (ПКЗЛ) (R-PICH), який базова станція 202 використовує для початкового збору 13 85180 даних, часового стеження, когерентного відновлення еталона в "рейк"-приймачі і вимірювань керування потужністю. Таким чином, системи та способи, описані тут, застосовні для пілотних сигналів і на низхідній лінії 302, і на висхідній лінії 304. Канал 504 доступ у використовується мобільною станцією 204 для зв'язку з базовою станцією 202, коли мобільна станція не має призначеного каналу 506 трафіка. Канал 506 трафіка висхідної лінії використовується для передачі даних і мови користувача. Повідомлення сигналізації також посилаються по каналу 506 трафіка висхідної лінії. Варіант здійснення мобільної станції 204 показаний в системі 600 абонентського блока, проілюстрованої у вигляді функціональної блок-схеми на Фіг.6. Система 600 включає в себе процесор 602, який керує роботою системи 600. Процесор 602 може також йменуватися як ЦП (центральний процесор) (CPU). Пам'ять 604, яка може включати в себе як постійний запам'я товуючий пристрій (ПЗП) (ROM), так і оперативний запам'ятовуючий пристрій (ОЗП) (RAM), забезпечує процесор 602 командами і даними. Частина пам'яті 604 може також включати в себе енергонезалежний оперативний запам'ятовуючий пристрій (ЕНОЗП) (NVRAM). Система 600, яка звичайно втілюється в безпровідному пристрої зв'язку, такому як стільниковий телефон, включає в себе також корпус 606, який містить передавач 608 і приймач 610, щоб забезпечити передачу і прийом даних, таких як аудіодані, між системою 600 і віддаленим розташуванням, таким як стільниковий контролер сайта або базова станція 202. Передавач 608 і приймач 610 можуть бути об'єднані в приймач-передавачач 612. Антена 614 прикріплюється до корпусу 606 і електрично зв'язується з приймачем-передавачем 612. Можуть бути також використані додаткові антени (не показано). Робота передавача 608, приймача 610 та антени 614 загальновідома з рівня техніки, і немає необхідності описувати це тут. Система 600 також включає в себе детектор 616 сигналу, що використовується для виявлення і визначення рівнів сигналів, що приймаються приймачем-передавачем 612. Детектор 616 сигналу виявляє такі сигнали, як повну потужність, відношення енергії пілотного сигналу на псевдошумовий (ПШ) (PN) елементарний інтервал, спектральну щільність потужності та інші сигнали, які відомі з рівня техніки. Перемикач 626 стану системи 600 керує станом пристрою безпровідного зв'язку на основі поточного стану і додаткових сигналів, що приймаються приймачем-передавачем 612 і виявлені детектором 616 сигналу. Пристрій безпровідного зв'язку здатний працювати в будь-якому з декількох станів. Система 600 також включає в себе системний визначник 628, що використовується для керування пристроєм безпровідного зв'язку і визначення того, до якої системи сервісного провайдера повинен передати пристрій безпровідного зв'язку, коли він виявить, що поточна система сервісного провайдера не підходить. 14 Різні компоненти системи 600 з'єднуються разом системною шиною 630, яка може включати в себе шину живлення, сигнальну шину керування і сигнальну шин у стан у в доповнення до шини даних. Однак, для розуміння, різні шини показуються на Фіг.6 як системна шина 630. Система 600 може також включати в себе цифровий процесор 607 сигналів (ЦПС) (DSP) для використання в обробці сигналів. Фахівцю буде зрозуміло, що система 600, показана на Фіг.6, є функціональною блок-схемою, а не переліком конкретних компонентів. Описані тут способи для використання адаптивного еквалайзера в зв'язувальному приймачі можуть бути втілені у варіанті здійснення абонентського блока 600. Розкриті системи та способи можуть також бути втілені в інших системах зв'язку з приймачем, таких як базова станція 202. Якщо базова станція 202 використовується для втілення розкритих систем та способів, то функціональна блок-схема на Фіг.6 може бути також використана для опису компонентів в функціональній блоксхемі базової станції 202. Фіг.7 є функціональною блок-схемою, що показує передачу безпровідного сигналу. Як показано, безпровідний сигнал включає в себе пілотний канал 702 та інші ортогональні канали 704. Додаткові неортогональні канали 706 можуть також бути включені в безпровідний сигнал. Зразкові неортогональні канали включають в себе канал синхронізації (КС) (SCH), канали, скрембльовані вторинним кодом скремблювання (ВКС) (SSC) в ШМДКР, і канали, розширені квазіортогональними послідовностями (КОП) (QOS) в cdma2000. Ортогональні канали подаються в компонент 708 ортогонального розширення. І ортогональні, і неортогональні канали потім подаються в компонент 710 канального посилення, який додає посилення для каналу. Вихідні сигнали з компонентів 710 канального посилення підсумовуються, як показано, суматором 712. Як показано на Фіг.7, неортогональні канали можуть бути з розділенням за часом. В інших варіантах здійснення один або декілька ортогональних каналів можуть мати часове мультиплексування. Неортогональні канали 706 не мають ортогональних компонентів, що розширюються. Деякі неортогональні канали 706 (наприклад, канал синхронізації) можуть подаватися безпосередньо в компонент 710 канального посилення. Інші неортогональні канали 706 (наприклад, канали, розширені квазіортогональними послідовностями в cdma2000) розширяються неортогонально, а потім подаються в компонент 710 канального посилення. Вихідні сигнали компонентів 710 канального посилення підсумовуються в суматорі 712. Підсумований сигнал подається в компонент 714 скремблювання псевдовипадковим шумом (ПВШ) (PN). Фільтр 716 основної смуги частот бере вихідний сигнал з компонента 714 скремблювання ПВШ і подає фільтрований вихідний сигнал 723 передавачу 718. Передавач 718 включає в себе антену 720. Сигнал, що передається, потім поступає в радіоканал 722. Функціональна блок-схема на Фіг.7, що показує передачу безпровідного сигналу, може бути 15 85180 втілена в різних компонентах. Наприклад, базова станція 202 втілює одну форму блок-схеми, показаної на Фіг.7. Додатково, мобільна станція 204 також реалізовує форму блок-схеми передачі. Фіг.8 є функціональною блок-схемою, що показує прийом безпровідного сигналу 801. Приймач 802 приймає безпровідний сигнал 801 через використання антени 804. Сигнал, що приймається, містить спотворені версії пілотного каналу, що передається, та інших каналів. Сигнал, що приймається, перетворюється на основну смугу частот і подається в узгоджений фільтр 806, який узгоджений з імпульсним відкликом фільтра основної смуги частот в передавачі. Вихідний сигнал 808 узгодженого фільтра 806 подається в еквалайзер 810. Вихідний сигнал 808 з узгодженого фільтра 806 все ще включає в себе всі різні канали, які передавалися. Еквалайзер 810 повинен виправляти спотворення, які виникають під час передачі по радіоканалу 722. Як описувалося раніше, ці спотворення можуть виникати через інтерференцію, канальні дефекти тощо. Еквалайзер 810 потім створює оцінку переданого сигналу. В одному варіанті здійснення еквалайзер 810 включає в себе фільтр, здійснений через використання декількох відводів 811 еквалайзера. Відводи можуть бути розподілені рівномірно або нерівномірно. В іншому варіанті здійснення еквалайзер виконується в частотній області. Адаптаційна компонента 812 еквалайзера дозволяє еквалайзеру 810 адаптува тися до змінних в часі станів каналу 722. На Фіг.8 вихідний сигнал 808 узгодженого фільтра 806 також подається в адаптаційну компоненту 812 еквалайзера. Адаптаційна компонента 812 еквалайзера адаптує еквалайзер для компенсації змін в станах каналу 722. Звичайно, адаптація еквалайзера включає в себе обчислення вагових коефіцієнтів 826 фільтра еквалайзера, які використовуються еквалайзером 810. Вагові коефіцієнти 826 відповідають відводам 811 еквалайзера. Переважно, адаптаційна компонента 812 еквалайзера адаптує еквалайзер 810, доки приймач 802 приймає безпровідний сигнал, який включає в себе пілотний канал та інші канали. Таким чином, незважаючи на те, що в інши х системах в цей час використовується пристрій адаптивних еквалайзерів, оснований на сигналах, які включають в себе тільки пілотний канал, системи та способи, описані тут, можуть підготовлюватися та адаптуватися навіть тоді, коли пілотний канал одночасно співіснує з іншими каналами. Функціональна блок-схема зразкового варіанта здійснення адаптаційної компоненти 912 еквалайзера показана на Фіг.9 і описується в зв'язку з нею. Вихід компоненти 812 еквалайзера подається в компоненти 814 дескремблювання ПВШ і 816 стиснення. Канали 818, що включають в себе пілотний та інші канали, стискуються компонентою 816 стиснення і потім подаються для подальшої обробки 820. Фіг.9 є функціональною блок-схемою варіанта здійснення адаптаційної компоненти 912 еквалайзера. Адаптаційна компонента 912 еквалайзера 16 включає в себе множину підканалів 902. На Фіг.9 показано N підканалів 902, де N є будь-яким позитивним цілим. Як вказувалося раніше, вихідний сигнал 808 з узгодженого фільтра 806 включає в себе всі різні канали, які передавалися. Додатково, вихідний сигнал 808 узгодженого фільтра 806 включає в себе множину багатопроменевих сигналів. Як описувалося раніше, багатопроменеві сигнали є різними варіантами одного і того ж сигналу, які створюються відбиттями від будівель та природних утворень. Багатопроменеві сигнали зсуваються за часом один від одного. На Фіг.9 вихідний сигнал узгодженого фільтра 806 подається в кожний підканал 902. Сигнал затримується на відповідне значення 900 для кожного підканалу 902. Затриманий сигнал потім подається в компоненту 902 дескремблювання ПВШ і в компоненту 906 пілотного дескремблювання в призначеному підканалі 902. В одному варіанті здійснення компонента 906 пілотного дескремблювання в кожному підканалі 902 може бути накопичувальною компонентою. Вихідний сигнал 908 кожного підканалу 902 в адаптаційній компоненті 912 еквалайзера включає в себе пілотні символи з окремого багатопроменевого сигналу у ви хідному сигналі 808 узгодженого фільтра 806. Компоненти 906 дескремблювання ПВШ в підканалах 902 можуть бути по суті подібні компоненті 814 дескремблювання ПВШ, показаній на Фіг.8. Однак компоненти 906 дескремблювання ПВШ в підканалах 902 зсуваються за часом компонентою 814 дескремблювання ПВШ, показаною на Фіг.8. У деяких варіантах здійснення деякі багатопроменеві сигнали у ви хідному сигналі 808 узгодженого фільтра 806 можуть не призначатися для підканалу 902. Наприклад, кількість багатопроменевих сигналів може бути більшою, ніж кількість доступних підканалів 902, або багатопроменевий сигнал може бути дуже слабким, щоб призначатися для підканалу 902. Вихідні сигнали 908 різних підканалів 902 потім подаються в компоненту 910 канальної оцінки і в компоненту 912 оцінки шумового параметра. Компонента 910 канальної оцінки створює канальні оцінки 914, а компонента 912 оцінки шумового параметра створює оцінки 916 параметрів шуму. Канальні оцінки 914 можуть включати в себе, наприклад, оцінки канальних коефіцієнтів для кожної з багатопроменевих компонент. Шумові параметричні оцінки 916 можуть включати в себе, наприклад, оцінку шумової коваріаційної матриці. Канальні оцінки 914 та шумові параметричні оцінки 916 потім подаються в компоненту 918 матричної побудови. Компонента 918 матричної побудови будує матрицю 920 канальних оцінок та матрицю 922 шумових параметричних оцінок. Матриця 920 канальних оцінок та матриця 922 шумових параметричних оцінок потім подаються в компоненту 924 обчислення вагових коефіцієнтів. Компонента 924 обчислення вагових коефіцієнтів використовує матрицю 920 канальних оцінок, матрицю 922 шумових параметричних оцінок і відому матрицю 926 з таблиці 928 перекодування для обчислення вагових коефіцієнтів 826 еквалайзера, 17 85180 які подаються в еквалайзер 810. Відома матриця 926 є функцією компоненти 814 дескремблювання ПВШ і компоненти 816 стиснення. На Фіг.7-9 далі забезпечуються математичний опис і вихідні різні сигнали, формули та алгоритми, які можуть бути використані. Представлення в дискретному часі передискретизованого сигналу 723, що передається, може бути записане, як показано в рівнянні (1). s=H·P·W·d (1) Значення d в рівнянні (1) включає в себе символи з всіх каналів і визначається з рівняння (2). D=[d(0)T, d(1)T,…,d(N-1)T]T (2) Значення W в рівнянні (1) визначається в рівняннях (3)-(5). W=[W(0),W( 1),...,W(N-1)] (3) W(u) Î C(N(2K+1))×(2K+1), u=1…N-1 (4) ìw ( u, N) × gu для і = 1...N, j = 1 ... 2K + 1ï ü j [W(u)]i+(j-1)N,j= ï i í ý (5 ) ï0 для решти ï î þ Рівняння (4) вказує, що W є комплексною матрицею з N(2K+1) рядками і 2К+1 стовпцями. Значення w в рівнянні (5) є кодом розширення. Приклади кодів розширення включають в себе коди Уолша, коди OVSF та квазіортогональні коди. Значення g в рівнянні (5) є значенням посилення каналу. Значення u в рівнянні (5) є призначеним для користувача індексом. Значення N в рівняннях (3)(5) є довжиною коду розширення. Значення і в рівнянні (5) є індексом часового інтервалу в коді розширення. Значення] в рівнянні (5) є індексом символу. Складовий сигнал часового інтервалу може визначатися, як показано в рівнянні (13). В=P·W·d (13) Таким чином, значення b в рівнянні (13) включає в себе символи (d) з всіх каналів, їх коди (W) розширення NF їх коди (Р) скремблювання. Тому рівняння (11) може бути переписано, як показано в рівнянні (14). r=A·H·b+v (14) Якщо еквалайзер 810 працює з рівнем часового інтервалу, то для то го, щоб оцінити сигнали часових інтервалів в час 0, йому необхідно тільки розглянути сигнали часового інтервалу обмеженого діапазону навколо 0 з індексами часового інтервалу m, як показано в рівнянні (15). 18 Значення Ρ в рівнянні (1) визначається в рівняннях (6)-(7). Ρ Î C(N(2K+1))×(N(2K+1)) діагональ (6) ì ( j,N) для і = 1...N, j = 1 ... 2K + 1ü ï [P]i+(j-1)N,i+(j-1)N= ïp i í ý (7 ) ï0 для решти ï î þ Значення рi в рівнянні (7) є часовим інтервалом скремблювання з індексом і. Значення Η в рівнянні (1) визначається в рівняннях (8)-(9). Η Î C({N(2K+1)-1}W+2B+1)×(N(2K+1)) (8) ìh для і = 1... 2B + 1 j = 1...N(2K + 1)ü , [H]i+(j-1)W,j= í i ý (9 ) î0 для решти þ Значення hi в рівнянні (9) є коефіцієнтом фільтра основної смуги частот з індексом і. Багатопроменевий канал 722 має імпульсний відклик, як визначено в рівнянні (10). P-1 f [m] = å ai × d[ m - i] (10) i= 0 У рівнянні (10) значення a i є комплексним значенням посилення каналу основної смуги частот. Сигнал 801, що приймається, може бути записаний, як показано в рівнянні (11). R=A·s+v=A·H·P·W·d+v (11) У рівнянні (11) значення ν є шумовим вектором. Значення А визначається в рівнянні (12). У рівнянні (12) значення А виражається в значеннях посилення каналу основної смуги частот. m Î {-M, -(M-1),...,-1, 0, 1,...,(M-1),M} (15) Потім рівняння (11) може бути переписане, як показано в рівнянні (16). rc=Ac·Hc·bc+vc (16) Зазначимо, що rс, Ас, Нс та vc є підматрицями r, А, Н та ν, відповідно. Значення bс в рівнянні (16) визначається в рівнянні (17). bc=[b[-M], b[-M+1],...,b[M]]T (17) Значення Нс в рівнянні (16) визначається в рівняннях (18)-(19). Значення Нс відповідає відомій матриці 928 на Фіг.9. Hc Î C(2M W+2B+1)×(2M+1) (18) ìh для і = 1... 2B + 1, j = 1...( 2M + 1)ü [Hc]i+(j-1)W,j= í i ý (19) î0 для решти þ 19 85180 20 Значення Ас в рівнянні (16) визначається в рівнянні (20). Значення Ас відповідає матриці 920 канальних оцінок на Фіг.9. Значення rс в рівнянні (16) відповідає вхідному сигналу 808 для еквалайзера 810. Вагові коефіцієнти 826 еквалайзера можуть бути позначені як w, а вихідний сигнал 813 еквалайзера 810 може бути позначений як у. Вихідний сигнал 813 еквалайзера 810 може потім бути записаний, як показано в рівнянні (21). у=wH·rc=wH·Ac·Hc·bc+wH·vc (21) Зазначимо, що rс тактується на швидкості Ω/Τc , у тактується на швидкості часового інтервалу, a w оновлюється на швидкості пілотного символу. Значення w в рівнянні (21) визначається в рівнянні (22). Як зазначалося раніше, w означає ваговий коефіцієнт 826 еквалайзера. Таким чином, рівняння (22) використовується компонентою 924 обчислення вагового коефіцієнта для обчислення вагового коефіцієнта 826 еквалайзера. r w=(Ас·Нс·Нсн·АсН+Λ)-1 ·Ас·Нс· eref (22) У рівнянні 22 значення Λ є коваріаційною матрицею шумового вектора vc. Значення Λ відповідає матриці 922 шумових параметричних оцінок на Фіг.9. Значення Ас відповідає матриці 920 канальr них оцінок на Фіг.9. Значення eref одержують з рівняння (23). вий коефіцієнт 826 еквалайзера позначається як w(k). Інші компоненти можуть бути використані в еквалайзері 810 крім фільтра КІХ. Наприклад, може бути використаний фільтр з нескінченною імпульсною характеристикою (НІХ) (IIR). Додатково, фільтрація може бути втілена в частотній області. Фіг.11 є блок-схемою способу 1100 для використання адаптивного еквалайзера 810, коли мобільною станцією 204 приймається безпровідний сигнал 801. Спосіб на Фіг.11 може також бути використаний базовою станцією 202 та іншими типами приймачів в системі 100 безпровідного зв'язку. Приймається 1102 безпровідний сигнал 801, який включає в себе пілотний канал 402 та інші канали. Пілотний канал 402 та інші канали можуть бути передані одночасно. У доповнення, пілотний канал 402 та інші канали можуть не бути передані одночасно. У доповнення, якщо спосіб 1100 втілювала базова станція 202, то буде включено менше каналів. Наприклад, якщо безпровідний сигнал 801 буде прийматися базовою станцією 202, безпровідний сигнал може включати в себе пілотний 502, доступ у 504 та канал - графіка 506. Як показано, спосіб 1100 може бути легко адаптований для використання в різних приймачах в системах 100 безпровідного зв'язку. Сигнал 801, що приймається, фільтрується 1104 за допомогою узгодженого фільтра 806. На виході узгодженого фільтра 806 визначається 1106, чи повинні обчислюватися нові вагові коефіцієнти 826 еквалайзера (як описувалося раніше, вагові коефіцієнти 826 еквалайзера відповідають відводам 811 еквалайзера). Різні установки можуть бути зроблені для здійснення цього визначення. Наприклад, спосіб 1100 може бути сформований для обчислення нових вагови х коефіцієнтів 826 еквалайзера на кожний інтервал пілотного символу. Як альтернатива спосіб 1100 може бути сформований для обчислення нових вагови х коефіцієнтів 826 еквалайзера на кожний Nий інтервал пілотного символу, де N є будь-яким позитивним цілим. Значення N може бути статичним, або воно може бути динамічним. Спосіб може бути сформований для узгодження відводів 811 еквалайзера T é ù r eref = ê0... 010... 0ú ( 23) { { ê M ë M ú û Описане вище математичне обговорення забезпечується як приклад можливості створення або використання даного винаходу фа хівцем. Однак фахівцю буде зрозуміло, що різні зміни можуть бути зроблені для різних сигналів, формул та алгоритмів, описаних вище, без відхилення від суті або обсягу винаходу. В одному варіанті здійснення еквалайзер 810 може бути втілений фільтром КІХ (з кінцевою імпульсною характеристикою) (FIR). Фіг.10 є блоксхемою, що показує здійснення фільтра 1000 КІХ. Як описувалося раніше і показано на Фіг.10, rс є вхідним сигналом 808 для фільтра 1000 КІХ, а у є вихідним сигналом фільтра 1000 КІХ. Існують k вагових коефіцієнтів 826 еквалайзера, показаних в фільтрі 1000 КІХ на Фіг.10, причому кожний ваго 21 85180 множину разів на кожному інтервалі пілотного символу. Фа хівцю буде зрозуміло, що залежно від обладнання може бути необхідно обчислення нових вагови х коефіцієнтів 826 еквалайзера частіше або рідше. Наприклад, в ситуаціях невеликих швидкостей може бути не потрібно обчислювати нові вагові коефіцієнти 826 еквалайзера так само часто, як і у випадку, коли система використовується в ситуаціях з високою швидкістю. Якщо визначається 1106, що повинні бути обчислені нові вагові коефіцієнти 826 еквалайзера, то ви хідний сигнал 808 з узгодженого фільтра 806 використовується для обчислення нових вагових коефіцієнтів 826 еквалайзера. Блок-схема алгоритму зразкового варіанта здійснення способу для обчислення 1108 нових вагови х коефіцієнтів 826 еквалайзера показана на Фіг.12 та описується разом з нею. Як тільки обчислюються 1108 нові вагові коефіцієнти, відводи 811 поновлюються 1110. Визначається чи 1106 чи ні, що нові вагові коефіцієнти 826 еквалайзера повинні бути обчислені 1108, вихідний сигнал 808 узгодженого фільтра 806 подається в еквалайзер 810 для компенсації 1112. Як зазначалося раніше, еквалайзер 810 виправляє спотворення сигналу 801 та створює оцінку сигналу, що передається. Еквалайзер 810 включає в себе фільтр, втілений через використання деякої кількості відводів 811, представлених тут за допомогою w. Еквалайзер 810 завантажує поточні вагові коефіцієнти відводів 811 для того, щоб втілити фільтр. Якщо відводи 811 фільтра оновлюються, то еквалайзер 810 завантажує оновлені вагові коефіцієнти відводів 811. Фахівцю будуть зрозумілі різні способи, в яких еквалайзер 810 може знати, що нові вагові коефіцієнти відводів 811 доступні. Вихідний сигнал 813 еквалайзера подається в компоненту 814 дескремблювання ПВШ, де виконується 1114 дескремблювання. Потім дескремблювання 1116 виконується для одержання пілотного та інших каналів. У результаті, відновлюються/декодуються 1118 інші канали. Фіг.12 є блок-схемою способу 1200 для обчислення нових вагови х коефіцієнтів 826 еквалайзера. Спосіб 1200 може бути виконаний адаптаційною компонентою 812 еквалайзера. Спосіб 1200 починається, коли приймається 1202 вихідний сигнал 808 узгодженого фільтра 806. Як описувалося раніше, вихідний сигнал 808 узгодженого фільтра 806 включає в себе множину багатопроменевих сигналів. Багатопроменеві сигнали є різними версіями одного і того ж безпровідного сигналу, які створюються відбиттями від будівель та природних утворень. Багатопроменеві сигнали зсуваються за часом один одного. Кожний підканал 902 адаптаційної компоненти 912 еквалайзера потім призначається для часового вирівнювання з багатопроменевим сигналом у вихідному сигналі 808. Це може бути виконане затримкою 1024 вихідного сигналу 808 узгодженого фільтра 806 з різними часовими затримками 900. Кожний затриманий варіант вихідного сигналу 808 узгодженого фільтра відповідає різним багатопроменевим сигналам. Кожний підканал 902 потім виконує 1206 дескремблювання ПВШ і піло 22 тне дескремблювання для одержання шумових пілотних символів з відповідного багатопроменевого сигналу. Шумові пілотні символи, що одержуються з різних багатопроменевих сигналів, потім використовуються для виконання 1208 канальної оцінки та шумової параметричної оцінки. Потім одержуються 1210 матриці, що використовуються для обчислення вагових коефіцієнтів 826 еквалайзера. Ці матриці можуть включати в себе матрицю 920 канальних оцінок, матрицю 922 шумових оцінок і відому матрицю 926, яка є функцією компоненти 814 дескремблювання ПВШ і компоненти 816 стиснення. В одному варіанті здійснення матрицею 920 канальних оцінок є Ас (як визначається в рівнянні (20)), матрицею 920 шумових оцінок є Λ, а відомою матрицею 926 є Нс (як визначається в рівняннях (1-8)-(19)). Потім обчислюються вагові коефіцієнти 826 еквалайзера згідно з рівнянням (22). Якщо безпровідний сигнал 801 посилався по висхідному каналу 304, то компоненти, показані тут, можуть бути використані в базовій станції 202. Буде зрозуміло, що ознаки винаходу можуть бути використані з різними компонентами або безпровідних сигналів 801, що приймаються мобільною станцією 204, базовою станцією 202, або іншою компонентою в системі 100 безпровідного зв'язку. Таким чином, варіант здійснення мобільної станції 204 є зразковим варіантом здійснення систем та способів, але зрозуміло, що системи та способи можуть бути використані в різних інших контекстах. Фахівцю буде зрозуміло, що інформація та сигнали можуть бути представлені за допомогою великої різноманітності технологій та методів. Наприклад, дані, команди, інформація, сигнали, біти, символи та елементарні інтервали, на які можуть бути посилання по всьому вищенаведеному опису, можуть бути представлені напругами, струмами, електромагнітними хвилями, магнітними полями або частинками, оптичними полями або частинками або будь-якими їх комбінаціями. Фахівцю буде далі зрозуміло, що різні показані логічні блоки, модулі, схеми і кроки алгоритму, описані разом з розкритими тут варіантами здійснення, можуть бути здійснені електронним апаратним забезпеченням, комп'ютерним програмним забезпеченням або їх комбінаціями. Щоб зрозуміло проілюструвати цю взаємозамінність апаратного та програмного забезпечення, різні ілюстративні компоненти, блоки, модулі, схеми і кроки описані вище загалом в термінах їх функцій. Чи втілені такі функції як апаратне забезпечення або як програмне забезпечення, залежить від конкретного застосування та конструктивних обмежень, накладених на всю систему. Фахівці можуть втілити описані функції різними шляхами для кожного конкретного застосування, але такі рішення по втіленню не повинні інтерпретуватися як такі, що тягнуть за собою вихід за обсяг даного винаходу. Різні показані логічні блоки, модулі та схеми, описані в зв'язку з розкритими тут варіантами здійснення, можуть бути втілені або виконані процесором загального призначення, цифровим процесором сигналів (ЦПС) (DSP), проблемно 23 85180 орієнтованою інтегральною мікросхемою (ПОІМ) (ASIC), програмованою користувачем матрицею вентилів (ПКМВ) (FPGA) або іншим програмованим логічним пристроєм, дискретним вентилем або транзисторною логікою, дискретними апаратними компонентами або їх комбінаціями, спроектованими для виконання описаних тут функцій. Процесор загального призначення може бути мікропроцесором, але як альтернатива цей процесор може бути будь-яким стандартним процесором, контролером, мікроконтролером або кінцевим автоматом. Процесор може також бути втілений як комбінація обчислювальних пристроїв, наприклад, комбінація ЦПС і мікропроцесора, множина мікропроцесорів, один або декілька мікропроцесорів разом з ядром ЦПС або будь-яка інша така конфігурація. Кроки способу або алгоритму, описані в зв'язку з розкритими тут варіантами здійснення, можуть бути втілені безпосередньо в апаратному забезпеченні, в програмному модулі, що виконується процесором, або в їх поєднанні. Програмний модуль може знаходитися в пам'яті ОЗП, флешпам'яті, пам'яті ПЗП, пам'я ті СППЗП (стираний програмований постійний запам'ятовуючий пристрій) (EPROM), пам'яті ЕСППЗП (електрично стираний постійний запам'ятовуючий пристрій) (EEPROM), регістрах, жорсткому диску, змінному диску, компакт-диску або в будь-якій іншій формі носія пам'яті, відомій з рівня техніки. Зразковий носій пам'яті зв'язаний з процесором, так що процесор може зчитувати інформацію з цього носія пам'яті і записувати інформацію на носій пам'яті. Як альтернатива, носій пам'яті може бути інтегрований з процесором. Процесор та носій пам'яті може знаходитися в ПОІМ. ПОІМ може знаходитися в терміналі користувача. Як альтернатива, процесор та носій пам'яті можуть знаходитися як дискретні компоненти в терміналі користувача. Способи, розкриті тут, містять один або більше кроків або дій для досягнення описаного способу. Кроки і/або дії способу можуть мінятися місцями один з одним без відходу від обсягу даного винаходу. Іншими словами, якщо тільки конкретний порядок кроків або дій не потрібний для належного здійснення варіанта способу, порядок і/або використання конкретних кроків і/або дій можуть бути змінені без відходу від обсягу даного винаходу. Попередній опис розкритих варіантів здійснення призначений для будь-якого фахівця, щоб зробити або використати даний винахід. Різні зміни цих варіантів здійснення будуть швидко зрозумілі фа хівцю, а основні принципи, описані тут, можуть бути застосовані для інших варіантів здійснення без відходу від суті та обсягу винаходу. Таким чином, даний винахід не призначений для обмеження показаними тут варіантами здійснення, але повинен узгоджуватися з найширшим обсягом, сумісним з розкритими тут принципами та новими ознаками. Перелік посилальних позицій Фіг.2 202 Базова станція 204 Мобільна станція Фіг.3 24 202 Базова станція 204 Мобільна станція 302 Низхідна лінія 304 Висхідна лінія Фіг.4 302 Низхідна лінія 402 Пілотний канал 404 Канал синхронізації 406 Пейджинговий канал 408 Канал трафіка Фіг.5 304 Висхідна лінія 502 Пілотний канал 504 Канал доступу 506 Канал трафіка Фіг.6 600 Абонентський блок 602 Процесор 604 Пам'ять 607 ЦПС 608 Передавач 610 Приймач 616 Детектор сигналу 626 Перемикач стану 628 Системний визначник Фіг.7 702 Пілотний канал 704 Інші ортогональні канали 706 Неортогональні канали 708а, 708b Ортогональне розширення 710 Канальне посилення 711 ВМ 714 ПВШ скремблювання 716 Фільтр основної смуги частот 720 Передавач 722 Радіоканал Фіг.8 722 Радіоканал 802 Приймач 806 Узгоджений фільтр 810 Еквалайзер 811 Відводи 812 Узгодження еквалайзера 814 ПВШ дескремблювання 816 Стиснення 820 Подальша обробка Фіг.9 900а, 900b, 900n Затримка 904а, 904b, 904n ПВШ дескремблювання 906а, 906b,906n Пілотне стиснення 910 Канальна оцінка 912 Шумова параметрична оцінка 918 Матрична побудова 924 Обчислення вагових коефіцієнтів 928 Таблиця перекодування Фіг.11 1102 Прийняти сигнал, який включає в себе пілотний та інші канали 1104 Фільтрувати за допомогою узгодженого фільтра 1106 Нові вагові коефіцієнти? 1108 Використовувати вихідний сигнал з узгодженого фільтра для обчислення нових вагових коефіцієнтів 1110 Оновити вагові коефіцієнти відводів 25 1112 Вирівнювати сигнал з узгодженого фільтра 1114 Виконати ПВШ дескремблювання 1116 Виконати стиснення та одержати пілотний та інші канали 1118 Відновити/декодувати інші канали Фіг.12 1202 Прийняти вихідний сигнал з узгодженого фільтра 85180 26 1204 Затримати вихідний сигнал узгодженого фільтра з різними зміщеннями 1206 Виконати ПВШ дескремблювання і пшотне стиснення для одержання пілотних символів з всіх версій затриманих сигналів 1208 Виконати канальну оцінку і шумову параметричну оцінку 1210 Одержати матриці 1212 Обчислити вагові коефіцієнти еквалайзера 27 85180 28 29 85180 30 31 Комп’ютерна в ерстка О. Рябко 85180 Підписне 32 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for signal estimating and a mobile station (embodiments)
Автори англійськоюMalladi Durga Prasad, Blanz Joseph, Wey Yunbing
Назва патенту російськоюСпособ оценки сигнала и мобильная станция (варианты)
Автори російськоюМаллади Дурга Прасад, Бланц Джозеф, Вей Юнбинь
МПК / Мітки
МПК: H04L 25/02, H04L 25/03
Мітки: мобільна, оцінки, спосіб, сигналу, станція, варіанти
Код посилання
<a href="https://ua.patents.su/16-85180-sposib-ocinki-signalu-ta-mobilna-stanciya-varianti.html" target="_blank" rel="follow" title="База патентів України">Спосіб оцінки сигналу та мобільна станція (варіанти)</a>
Багаточастотна базова станція (варіанти) і багаточастотна мобільна станція (варіанти) для здійснення способу передачі компонентів даних і способу приймання компонентів даних
Номер патенту: 70358
Опубліковано: 15.10.2004
Автор: Джоу Ю-Чен
МПК: H04J 1/00, H04L 27/26
Мітки: варіанти, станція, даних, способу, приймання, компонентів, багаточастотна, передачі, здійснення, мобільна, базова
Формула / Реферат:
1. Багаточастотна базова станція, яка працює у заздалегідь визначеній групі частот і передає компоненти даних прямого каналу зв'язку одночасно у кількох смугах частот і яка має:- першу передавальну підсистему для передачі повідомлення синхроканалу на одній несучій частоті із заздалегідь визначеної групи частот, причому зазначене повідомлення синхроканалу вказує щонайменше центральну частоту багаточастотної або одночастотної підсистеми...
Спосіб визначення швидкості зворотного каналу у системі безпровідного зв’язку, пристрій для реалізації цього способу, віддалена станція (варіанти) та базова станція (варіанти)
Номер патенту: 73737
Опубліковано: 15.09.2005
Автори: Гроб Мет'ю Ст'юарт, Бендер Пол І., Кармі Гаді, Падовані Роберто
МПК: H04B 7/26, H04Q 7/38, H04L 1/00
Мітки: зворотного, спосіб, визначення, системі, каналу, способу, базова, реалізації, станція, варіанти, безпровідного, цього, пристрій, зв'язку, віддалена, швидкості
Формула / Реферат:
1. Спосіб визначення швидкості передачі зворотного каналу зазначеної віддаленої станції у системі зв'язку, де кожна базова станція, що підтримує зв'язок з віддаленою станцією, передає біт зайнятості зворотного каналу, який вказує, чи є вичерпаною пропускна здатність зворотного каналу, який включає:визначення швидкості передачі зворотного каналу згідно з об'єднаним сигналом зайнятості зворотного каналу, сформованим згідно з бітами...
Спосіб і пристрій (варіанти) передачі пілот-сигналу та спосіб і пристрій (варіанти) виконання оцінки каналу у безпровідній системі зв’язку
Номер патенту: 83705
Опубліковано: 11.08.2008
Автори: Кадоус Тамер, Горе Дхананджай Ашок, Агравал Авніш
МПК: H04L 25/02, H04L 27/26, H04B 7/06
Мітки: передачі, зв'язку, пілот-сигналу, варіанти, пристрій, оцінки, спосіб, каналу, виконання, системі, безпровідній
Формула / Реферат:
1. Спосіб передачі пілот-сигналу у безпровідній системі зв'язку з множиною антен, що містить етапи:генерують перший набір з Т масштабованих пілотних символів за допомогою першого вектора з Т коефіцієнтів, де Т - ціле число більше одиниці, і в якому перший набір масштабованих пілотних символів призначений для використання для оцінки каналу приймачами з однією антеною;вибірково генерують щонайменше Т-1 додаткових наборів з Т...
Спосіб поліпшення передавання інформаційного сигналу у інформаційному каналі та система зв’язку cdma з таким каналом (варіанти)
Номер патенту: 74153
Опубліковано: 15.11.2005
Автор: Ландбі Стайн А.
МПК: H04B 1/10, H04B 1/00, H04B 17/00, H04B 15/00
Мітки: каналі, спосіб, поліпшення, інформаційному, передавання, варіанти, система, зв'язку, інформаційного, таким, сигналу, каналом
Формула / Реферат:
1. Cпосіб поліпшення передавання інформаційного сигналу, що несе інформацію повідомлення у системі зв'язку CDMA з інформаційним каналом, який полягає в тому, що(а) приймають переданий по інформаційному каналу сигнал, який містить шум,(б) виділяють інформацію повідомлення з прийнятого інформаційного сигналу для одержання послідовності символів,(в) проводять послідовність символів через перший фільтр для одержання першого...
Мобільна повітряна електрична станція
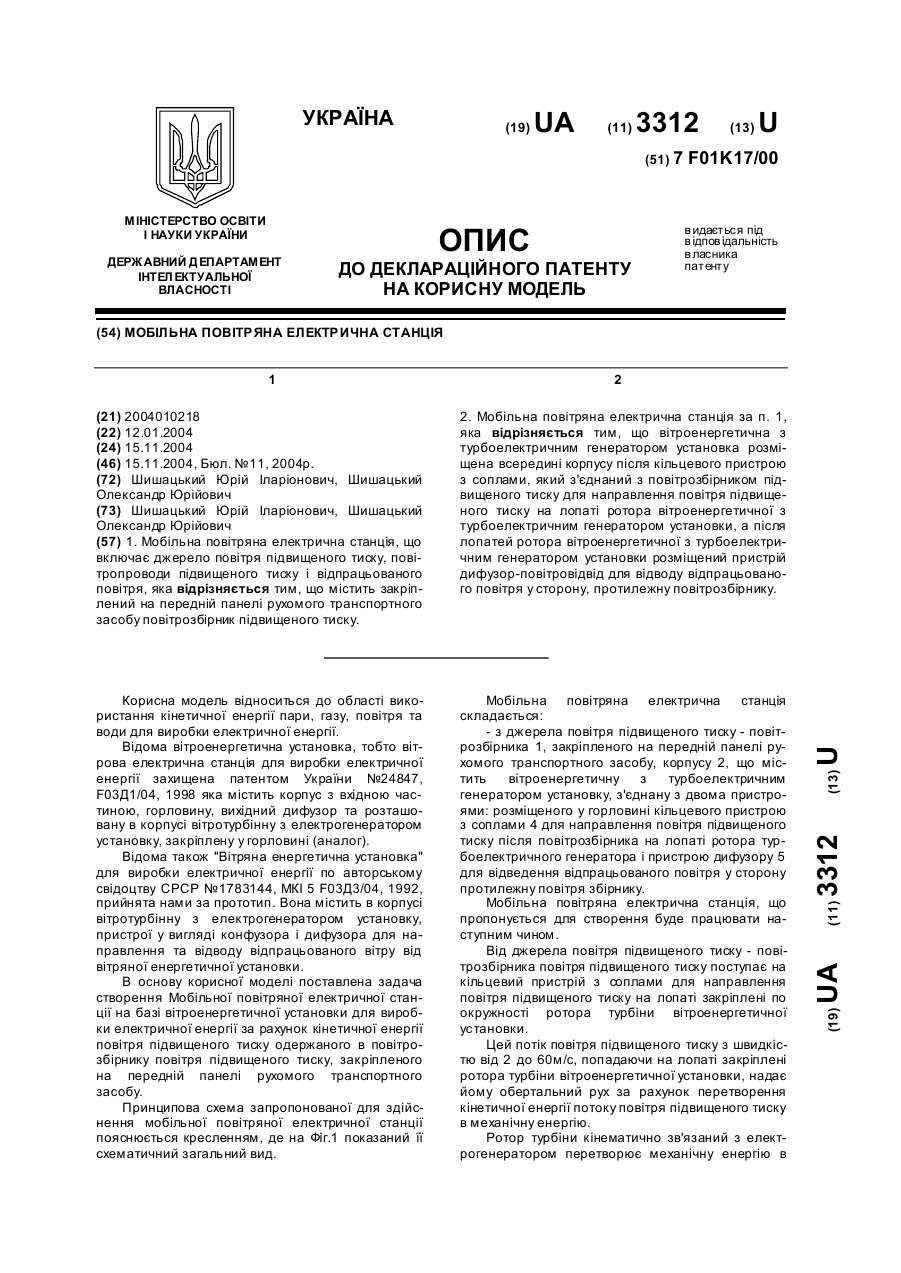
Номер патенту: 3312
Опубліковано: 15.11.2004
Автори: Шишацький Юрій Іларіонович, Шишацький Олександр Юрійович
МПК: F01K 17/00
Мітки: повітряна, мобільна, станція, електрична
Формула / Реферат:
1. Мобільна повітряна електрична станція, що включає джерело повітря підвищеного тиску, повітропроводи підвищеного тиску і відпрацьованого повітря, яка відрізняється тим, що містить закріплений на передній панелі рухомого транспортного засобу повітрозбірник підвищеного тиску.2. Мобільна повітряна електрична станція за п. 1, яка відрізняється тим, що вітроенергетична з турбоелектричним генератором установка розміщена всередині корпусу...
Попередній патент: Занурена розливна труба для лиття потоку розплаву металу та спосіб її використання
Наступний патент: Спосіб і пристрій для вдосконаленого кодування в багатокористувальницьких системах зв’язку (варіанти)
Випадковий патент: Пристрій для освітлення побутових приміщень