Приймач системи зв’язку з адаптивним компенсатором на основі багатоканального прийому
Номер патенту: 88605
Опубліковано: 10.11.2009
Автори: Малладі Дурга Прасад, Вей Юнбінь, Бланц Джозеф



Формула / Реферат
1. Спосіб оцінювання безпровідного сигналу в системі безпровідного зв'язку, який включає в себе
прийом безпровідного сигналу, який містить канал пілот-сигналу і щонайменше один інший канал,
обробку безпровідного сигналу з використанням вхідного каскаду багатовідвідного приймача для забезпечення множини вихідних сигналів вхідного каскаду,
виконання оцінювання каналу на основі множини вихідних сигналів вхідного каскаду для одержання множини оцінок каналів,
використання оцінок каналу для об'єднання множини вихідних сигналів вхідного каскаду в об'єднаний сигнал,
оцінювання безпровідного сигналу з використанням компенсатора та об'єднаного сигналу, при цьому компенсатор включає в себе фільтр з множиною відводів, які адаптуються за допомогою використання адаптивного алгоритму, який використовує оцінки пілот-сигналу, оцінені з безпровідного сигналу, при цьому канал пілот-сигналу передається щонайменше з одним іншим каналом,
виділення оціненого пілот-сигналу і
видачу пілот-сигналу в адаптивний алгоритм.
2. Спосіб за п. 1, в якому адаптивний алгоритм являє собою ітераційний алгоритм.
3. Спосіб за п. 1, в якому канал пілот-сигналу є мультиплексованим з використанням кодового ущільнення.
4. Спосіб за п. 3, в якому безпровідний сигнал додатково містить ортогональні і неортогональні канали.
5. Спосіб за п. 1, в якому компенсатор містить КІХ-фільтр.
6. Спосіб за п. 1, в якому компенсатор містить НІХ-фільтр.
7. Спосіб за п. 1, в якому фільтрація виконується в частотній області.
8. Спосіб за п. 1, в якому адаптивний алгоритм використовується однократно на кожний символьний інтервал пілот-сигналу для оновлення значень відводів.
9. Спосіб за п. 1, в якому адаптивний алгоритм використовується N разів на кожний символьний інтервал пілот-сигналу для оновлення значень відводів, де N - будь-яке позитивне ціле число.
10. Спосіб за п. 1, в якому адаптивний алгоритм використовується однократно на кожний N-ий символьний інтервал пілот-сигналу для оновлення значень відводів, де N - будь-яке позитивне ціле число, більше 1.
11. Спосіб за п. 1, в якому адаптивний алгоритм продовжує адаптувати нові значення відводів до досягнення збіжності нових значень відводів.
12. Спосіб за п. 1, в якому адаптивний алгоритм продовжує адаптувати нові значення відводів протягом заданого часового інтервалу.
13. Спосіб за п. 1, в якому адаптивний алгоритм виконує адаптацію при зміні умов в каналі, коли компенсатор не узгоджується з поточними умовами в каналі.
14. Спосіб за п. 1, який додатково містить прийом другого безпровідного сигналу і виконання дій за п. 1 над другим безпровідним сигналом паралельно з виконанням дій над безпровідним сигналом, прийнятим першим.
15. Спосіб за п. 1, в якому відводи є еквідистантними.
16. Спосіб за п. 1, в якому відводи є нееквідистантними.
17. Спосіб за п. 1, в якому канал пілот-сигналу передається безперервно.
18. Спосіб за п. 1, в якому канал пілот-сигналу не передається безперервно.
19. Спосіб за п. 1, в якому щонайменше один інший канал передається безперервно.
20. Спосіб за п. 1, в якому щонайменше один інший канал не передається безперервно.
21. Спосіб за п. 1, в якому щонайменше один інший канал містить канал трафіка.
22. Спосіб за п. 1, в якому вхідний каскад багатовідвідного приймача містить множину відводів, при цьому кожний вихідний сигнал вхідного каскаду містить оцінку символів пілот-сигналу, одержаних з одного з множини відводів.
23. Спосіб за п. 22, в якому кожний відвід зв'язаний з компонентом багатопроменевого поширення безпровідного сигналу.
24. Мобільна станція для використання в системі безпровідного зв'язку, причому мобільна станція оцінює сигнал, що передається, при цьому мобільна станція містить
щонайменше одну антену для прийому безпровідного сигналу, який містить канал пілот-сигналу і щонайменше один інший канал,
приймач, електронним способом зв'язаний з щонайменше однією антеною,
вхідний каскад багатовідвідного приймача з оцінюванням каналу для забезпечення множини вихідних сигналів вхідного каскаду,
блок оцінювання каналу для виконання оцінювання каналу на основі множини вихідних сигналів вхідного каскаду для одержання множини оцінок каналів,
блок об'єднання для використання множини оцінок каналу для об'єднання множини вихідних сигналів вхідного каскаду в об'єднаний сигнал,
компенсатор для оцінювання переданого сигналу, при цьому компенсатор використовує об'єднаний сигнал і включає в себе фільтр з множиною відводів, які адаптуються в процесі використання адаптивного алгоритму, який використовує оцінки пілот-сигналу, оцінені з прийнятого безпровідного сигналу, при цьому канал пілот-сигналу передається щонайменше з одним іншим каналом,
компонент для виділення оціненого пілот-сигналу і для видачі оцінки пілот-сигналу в адаптивний алгоритм.
25. Мобільна станція за п. 24, в якій адаптивний алгоритм являє собою ітераційний алгоритм.
26. Мобільна станція за п. 24, в якій компенсатор містить КІХ-фільтр.
27. Мобільна станція за п. 24, в якій компенсатор містить НІХ-фільтр.
28. Мобільна станція за п. 24, в якій фільтрація виконується в частотній області.
29. Мобільна станція за п. 24, в якій адаптивний алгоритм оновлює значення відводів однократно на кожний символьний інтервал пілот-сигналу.
30. Мобільна станція за п. 24, в якій адаптивний алгоритм оновлює значення відводів N разів на кожний символьний інтервал пілот-сигналу, де N - будь-яке позитивне ціле число.
31. Мобільна станція за п. 24, в якій адаптивний алгоритм оновлює значення відводів однократно на кожний N-ий символьний інтервал пілот-сигналу, де N - будь-яке позитивне ціле число, більше 1.
32. Мобільна станція за п. 24, в якій адаптивний алгоритм продовжує адаптувати нові значення відводів до досягнення збіжності нових значень відводів.
33. Мобільна станція за п. 24, в якій канал пілот-сигналу є мультиплексованим з використанням кодового ущільнення.
34. Мобільна станція за п. 24, в якій адаптивний алгоритм використовується для оновлення значень відводів в процесі прийому трафіка.
35. Мобільна станція за п. 24, в якій вхідний каскад багатовідвідного приймача містить множину відводів, при цьому кожний вихідний сигнал вхідного каскаду містить оцінку символів пілот-сигналу, одержаних з одного з множини відводів.
36. Мобільна станція за п. 35, в якій кожний відвід зв'язаний з компонентом багатопроменевого поширення безпровідного сигналу, що приймається.
37. Пристрій для оцінювання безпровідного сигналу в системі безпровідного зв'язку, при цьому пристрій містить
щонайменше одну антену для прийому безпровідного сигналу, який містить канал пілот-сигналу і щонайменше один інший канал,
приймач, електронним способом зв'язаний з щонайменше однією антеною,
вхідний каскад багатовідвідного приймача з оцінюванням каналу для забезпечення множини вихідних сигналів вхідного каскаду,
блок оцінювання каналу для виконання оцінювання каналу на основі множини вихідних сигналів вхідного каскаду для одержання множини оцінок каналу,
блок об'єднання для використання множини оцінок каналу для об'єднання множини вихідних сигналів вхідного каскаду в об'єднаний сигнал,
компенсатор для оцінювання безпровідного сигналу, при цьому компенсатор використовує об'єднаний сигнал і включає в себе фільтр з множиною відводів, які адаптуються в процесі використання адаптивного алгоритму, який використовує оцінку пілот-сигналу, оцінену з безпровідного сигналу, при цьому канал пілот-сигналу передається щонайменше з одним іншим каналом,
компонент для виділення оціненого пілот-сигналу і для видачі оцінки пілот-сигналу в адаптивний алгоритм.
38. Пристрій за п. 37, в якому адаптивний алгоритм являє собою ітераційний алгоритм.
39. Пристрій за п. 37, в якому компенсатор містить КІХ-фільтр.
40. Пристрій за п. 37, в якому компенсатор містить НІХ-фільтр.
41. Пристрій за п. 37, в якому фільтрація виконується в частотній області.
42. Пристрій за п. 37, в якому адаптивний алгоритм оновлює значення відводів однократно на кожний символьний інтервал пілот-сигналу.
43. Пристрій за п. 37, в якому адаптивний алгоритм оновлює значення відводів N разів на кожний символьний інтервал пілот-сигналу, де N - будь-яке позитивне ціле число.
44. Пристрій за п. 37, в якому адаптивний алгоритм оновлює значення відводів однократно на кожний N-ий символьний інтервал пілот-сигналу, де N - будь-яке позитивне ціле число, більше 1.
45. Пристрій за п. 37, в якому адаптивний алгоритм продовжує адаптувати нові значення відводів до досягнення збіжності нових значень відводів.
46. Пристрій за п. 37, в якому канал пілот-сигналу є мультиплексованим з використанням кодового ущільнення.
47. Пристрій за п. 37, причому пристрій є мобільною станцією.
48. Пристрій за п. 37, причому пристрій є базовою станцією.
49. Пристрій за п. 37, в якому вхідний каскад багатовідвідного приймача містить множину відводів, при цьому кожний вихідний сигнал вхідного каскаду містить оцінку символів пілот-сигналу, одержаних з одного з множини відводів.
50. Пристрій за п. 49, в якому кожний відвід зв'язаний з компонентом багатопроменевого поширення безпровідного сигналу.
51. Мобільна станція для використання в системі безпровідного зв'язку, причому мобільна станція оцінює сигнал, що передається, при цьому мобільна станція містить
засіб для прийому безпровідного сигналу, який містить канал пілот-сигналу і щонайменше один інший канал,
засіб для обробки окремих компонентів багатопроменевого поширення безпровідного сигналу для забезпечення множини вихідних сигналів багатопроменевого поширення,
засіб для виконання оцінювання каналу на основі множини вихідних сигналів багатопроменевого поширення для одержання множини оцінок каналу,
засіб для використання множини оцінок каналу для об'єднання множини вихідних сигналів багатопроменевого поширення в об'єднаний сигнал,
засіб для оцінювання переданого сигналу, при цьому засіб для оцінювання використовує об'єднаний сигнал і включає в себе множину відводів, які адаптуються з використанням засобу для адаптації, який використовує оцінку пілот-сигналу, оцінену з прийнятого безпровідного сигналу, при цьому канал пілот-сигналу передається щонайменше з одним іншим каналом,
засіб для виділення оцінки пілот-сигналу і для видачі оцінки пілот-сигналу в засіб для адаптації.
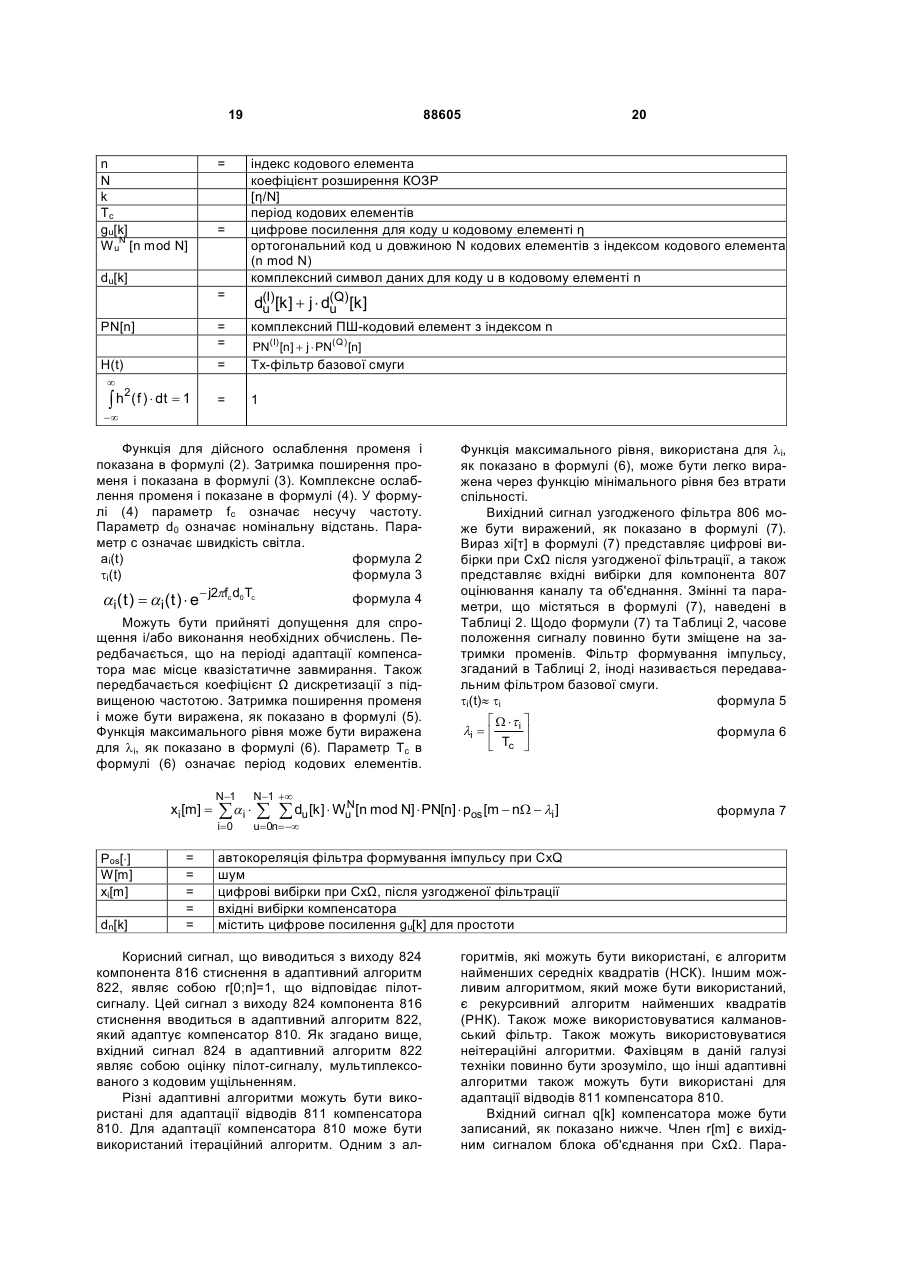
Текст
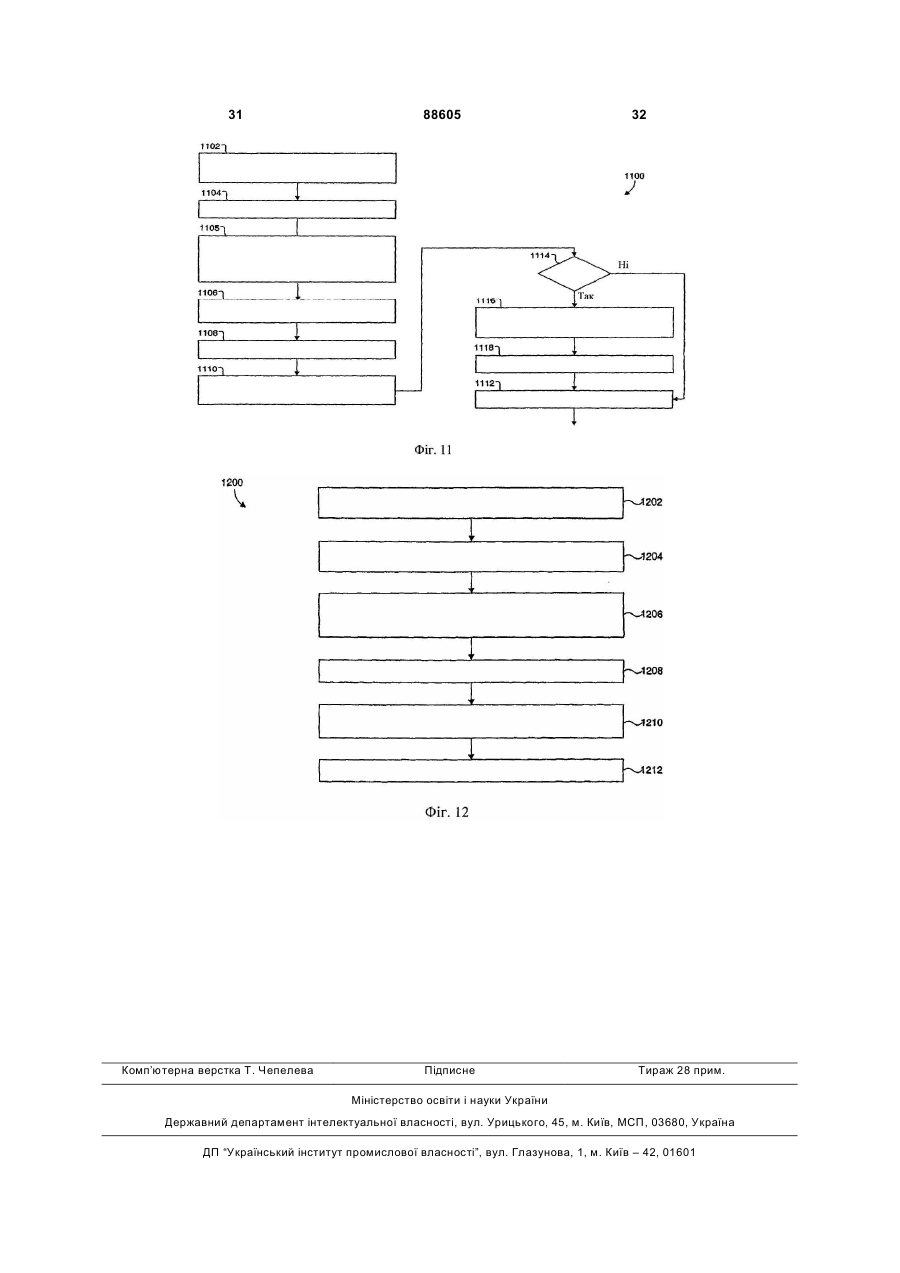
1. Спосіб оцінювання безпровідного сигналу в системі безпровідного зв'язку, який включає в себе прийом безпровідного сигналу, який містить канал пілот-сигналу і щонайменше один інший канал, обробку безпровідного сигналу з використанням вхідного каскаду багатовідвідного приймача для забезпечення множини вихідних сигналів вхідного каскаду, виконання оцінювання каналу на основі множини вихідних сигналів вхідного каскаду для одержання множини оцінок каналів, використання оцінок каналу для об'єднання множини вихідних сигналів вхідного каскаду в об'єднаний сигнал, оцінювання безпровідного сигналу з використанням компенсатора та об'єднаного сигналу, при цьому компенсатор включає в себе фільтр з множиною відводів, які адаптуються за допомогою використання адаптивного алгоритму, який використовує оцінки пілот-сигналу, оцінені з безпровідного сигналу, при цьому канал пілотсигналу передається щонайменше з одним іншим каналом, виділення оціненого пілот-сигналу і видачу пілот-сигналу в адаптивний алгоритм. 2. Спосіб за п.1, в якому адаптивний алгоритм являє собою ітераційний алгоритм. 3. Спосіб за п.1, в якому канал пілот-сигналу є мультиплексованим з використанням кодового ущільнення. 2 (19) 1 3 19. Спосіб за п.1, в якому щонайменше один інший канал передається безперервно. 20. Спосіб за п.1, в якому щонайменше один інший канал не передається безперервно. 21. Спосіб за п.1, в якому щонайменше один інший канал містить канал трафіка. 22. Спосіб за п.1, в якому вхідний каскад багатовідвідного приймача містить множину відводів, при цьому кожний вихідний сигнал вхідного каскаду містить оцінку символів пілот-сигналу, одержаних з одного з множини відводів. 23. Спосіб за п.22, в якому кожний відвід зв'язаний з компонентом багатопроменевого поширення безпровідного сигналу. 24. Мобільна станція для використання в системі безпровідного зв'язку, причому мобільна станція оцінює сигнал, що передається, при цьому мобільна станція містить щонайменше одну антену для прийому безпровідного сигналу, який містить канал пілот-сигналу і щонайменше один інший канал, приймач, електронним способом зв'язаний з щонайменше однією антеною, вхідний каскад багатовідвідного приймача з оцінюванням каналу для забезпечення множини вихідних сигналів вхідного каскаду, блок оцінювання каналу для виконання оцінювання каналу на основі множини вихідних сигналів вхідного каскаду для одержання множини оцінок каналів, блок об'єднання для використання множини оцінок каналу для об'єднання множини вихідних сигналів вхідного каскаду в об'єднаний сигнал, компенсатор для оцінювання переданого сигналу, при цьому компенсатор використовує об'єднаний сигнал і включає в себе фільтр з множиною відводів, які адаптуються в процесі використання адаптивного алгоритму, який використовує оцінки пілот-сигналу, оцінені з прийнятого безпровідного сигналу, при цьому канал пілот-сигналу передається щонайменше з одним іншим каналом, компонент для виділення оціненого пілот-сигналу і для видачі оцінки пілот-сигналу в адаптивний алгоритм. 25. Мобільна станція за п.24, в якій адаптивний алгоритм являє собою ітераційний алгоритм. 26. Мобільна станція за п.24, в якій компенсатор містить КІХ-фільтр. 27. Мобільна станція за п.24, в якій компенсатор містить НІХ-фільтр. 28. Мобільна станція за п.24, в якій фільтрація виконується в частотній області. 29. Мобільна станція за п.24, в якій адаптивний алгоритм оновлює значення відводів однократно на кожний символьний інтервал пілот-сигналу. 30. Мобільна станція за п.24, в якій адаптивний алгоритм оновлює значення відводів N разів на кожний символьний інтервал пілот-сигналу, де N - будь-яке позитивне ціле число. 31. Мобільна станція за п.24, в якій адаптивний алгоритм оновлює значення відводів однократно на кожний N-ий символьний інтервал пілотсигналу, де N - будь-яке позитивне ціле число, більше 1. 88605 4 32. Мобільна станція за п.24, в якій адаптивний алгоритм продовжує адаптувати нові значення відводів до досягнення збіжності нових значень відводів. 33. Мобільна станція за п.24, в якій канал пілотсигналу є мультиплексованим з використанням кодового ущільнення. 34. Мобільна станція за п.24, в якій адаптивний алгоритм використовується для оновлення значень відводів в процесі прийому трафіка. 35. Мобільна станція за п.24, в якій вхідний каскад багатовідвідного приймача містить множину відводів, при цьому кожний вихідний сигнал вхідного каскаду містить оцінку символів пілотсигналу, одержаних з одного з множини відводів. 36. Мобільна станція за п.35, в якій кожний відвід зв'язаний з компонентом багатопроменевого поширення безпровідного сигналу, що приймається. 37. Пристрій для оцінювання безпровідного сигналу в системі безпровідного зв'язку, при цьому пристрій містить щонайменше одну антену для прийому безпровідного сигналу, який містить канал пілот-сигналу і щонайменше один інший канал, приймач, електронним способом зв'язаний з щонайменше однією антеною, вхідний каскад багатовідвідного приймача з оцінюванням каналу для забезпечення множини вихідних сигналів вхідного каскаду, блок оцінювання каналу для виконання оцінювання каналу на основі множини вихідних сигналів вхідного каскаду для одержання множини оцінок каналу, блок об'єднання для використання множини оцінок каналу для об'єднання множини вихідних сигналів вхідного каскаду в об'єднаний сигнал, компенсатор для оцінювання безпровідного сигналу, при цьому компенсатор використовує об'єднаний сигнал і включає в себе фільтр з множиною відводів, які адаптуються в процесі використання адаптивного алгоритму, який використовує оцінку пілот-сигналу, оцінену з безпровідного сигналу, при цьому канал пілот-сигналу передається щонайменше з одним іншим каналом, компонент для виділення оціненого пілот-сигналу і для видачі оцінки пілот-сигналу в адаптивний алгоритм. 38. Пристрій за п.37, в якому адаптивний алгоритм являє собою ітераційний алгоритм. 39. Пристрій за п.37, в якому компенсатор містить КІХ-фільтр. 40. Пристрій за п.37, в якому компенсатор містить НІХ-фільтр. 41. Пристрій за п.37, в якому фільтрація виконується в частотній області. 42. Пристрій за п.37, в якому адаптивний алгоритм оновлює значення відводів однократно на кожний символьний інтервал пілот-сигналу. 43. Пристрій за п.37, в якому адаптивний алгоритм оновлює значення відводів N разів на кожний символьний інтервал пілот-сигналу, де N будь-яке позитивне ціле число. 44. Пристрій за п.37, в якому адаптивний алгоритм оновлює значення відводів однократно на 5 88605 6 кожний N-ий символьний інтервал пілот-сигналу, де N - будь-яке позитивне ціле число, більше 1. 45. Пристрій за п.37, в якому адаптивний алгоритм продовжує адаптувати нові значення відводів до досягнення збіжності нових значень відводів. 46. Пристрій за п.37, в якому канал пілот-сигналу є мультиплексованим з використанням кодового ущільнення. 47. Пристрій за п.37, причому пристрій є мобільною станцією. 48. Пристрій за п.37, причому пристрій є базовою станцією. 49. Пристрій за п.37, в якому вхідний каскад багатовідвідного приймача містить множину відводів, при цьому кожний вихідний сигнал вхідного каскаду містить оцінку символів пілот-сигналу, одержаних з одного з множини відводів. 50. Пристрій за п.49, в якому кожний відвід зв'язаний з компонентом багатопроменевого поширення безпровідного сигналу. 51. Мобільна станція для використання в системі безпровідного зв'язку, причому мобільна станція оцінює сигнал, що передається, при цьому мобільна станція містить засіб для прийому безпровідного сигналу, який містить канал пілот-сигналу і щонайменше один інший канал, засіб для обробки окремих компонентів багатопроменевого поширення безпровідного сигналу для забезпечення множини вихідних сигналів багатопроменевого поширення, засіб для виконання оцінювання каналу на основі множини вихідних сигналів багатопроменевого поширення для одержання множини оцінок каналу, засіб для використання множини оцінок каналу для об'єднання множини вихідних сигналів багатопроменевого поширення в об'єднаний сигнал, засіб для оцінювання переданого сигналу, при цьому засіб для оцінювання використовує об'єднаний сигнал і включає в себе множину відводів, які адаптуються з використанням засобу для адаптації, який використовує оцінку пілотсигналу, оцінену з прийнятого безпровідного сигналу, при цьому канал пілот-сигналу передається щонайменше з одним іншим каналом, засіб для виділення оцінки пілот-сигналу і для видачі оцінки пілот-сигналу в засіб для адаптації Даний винахід відноситься до компенсації в системах зв'язку, конкретніше, до адаптивного компенсатора для використання в системах безпровідного зв'язку. Системи зв'язку використовуються для передачі інформації від одного пристрою до іншого. Перед передачею інформація кодується в формат, придатний для передачі по каналу зв'язку. Сигнал, що передається, спотворюється по мірі того, як він проходить по каналу зв'язку; сигнал такoж зазнає спотворення під впливом шумів та перешкод, що сприймаються в процесі передачі. Одним з явищ, які створюють спотворення сигналу, є багатопроменеве поширення. Сигнали багатопроменевого поширення являють собою різні копії одного і того самого безпровідного сигналу, які формуються за рахунок відбиття від конструкцій та природних об'єктів. Сигнали багатопроменевого поширення можуть мати фазові зсуви, які обумовлюють компенсацію сигналів одного з одним в визначених місцеположеннях. Втрати сигналу внаслідок фазової компенсації сигналів багатопроменевого поширення відомі як завмирання сигналу. Завмирання являє собою проблему в системах безпровідного зв'язку, оскільки воно призводить до переривань передач користувача. Наприклад, різні зумовлені багатопроменевим поширенням копії одного сигналу безпровідного зв'язку, що передається пристроєм безпровідного зв'язку, можуть формуватися за рахунок відбиття від дерев та будівель. Ці копії, зумовлені багатопроменевим поширенням, можуть комбінуватися і компенсувати одна одну внаслідок фазових зсувів. Іншим фактором, який може впливати на сигнал, є неадекватне відношення сигнал/шум. Відношення сигнал/шум (С/Ш) представляє потужність сигналу по відношенню до шуму оточуючого середовища. Адекватне відношення С/Ш повинне підтримуватися так, щоб сигнал міг бути виділений з шумів. Прикладом перешкоди, що звичайно має місце в обмежених по смузі каналах, є міжсимвольна перешкода (МСП). МСП виникає як результат розширення імпульсу символу, що передається, внаслідок дисперсійного характеру каналу, що призводить до перекриття імпульсів сусідніх символів. Дисперсійний характер каналу зумовлений багатопроменевим поширенням сигналів. Прийнятий сигнал декодується і переводиться у вихідну форму, до здійснення кодування. Як передавач, так і приймач проектуються для мінімізації ефектів неідеальності каналів та перешкод. Різні форми виконання приймачів можуть бути реалізовані для компенсації шумів та перешкод, зумовлених передавачем і каналом. Наприклад, компенсатор характеризує собою звичайний засіб, що застосовується для зниження впливу багатопроменевості, МСП і поліпшення відношення С/Ш. Компенсатор коректує спотворення і формує оцінку символу, що передається. У середовищі безпровідної передачі компенсатори потрібні для вирішення проблем, пов'язаних з умовами каналу, що змінюються в часі. В ідеальному випадку відклик компенсатора підстроюється до змін в харак 7 теристиках каналів. Здатність компенсатора реагувати на умови, що змінюються, пов'язана з можливостями адаптації компенсатора. Оптимізація компенсатора за рахунок створення ефективного алгоритму адаптації викликає ускладнення, оскільки це вимагає врахування суперечливих цілей. Тому існує необхідність в схемі компенсатора, який оптимізує характеристики для різних систем та умов. Короткий опис креслень Фіг.1 - діаграма системи зв'язку з розширеним спектром, яка підтримує множину користувачів; Фіг.2 - блок-схема базової станції та мобільної станції в системі зв'язку; Фіг.3 - блок-схема, що ілюструє пряму лінію зв'язку і зворотну лінію зв'язку між базовою станцією та мобільною станцією; Фіг.4 - блок-схема каналів у варіанті здійснення прямої лінії зв'язку; Фіг.5 - блок-схема каналів у варіанті здійснення зворотної лінії зв'язку; Фіг.6 - блок-схема варіанта здійснення абонентського блока; Фіг.7 - функціональна блок-схема, що ілюструє передачу безпровідного сигналу; Фіг.8 - функціональна блок-схема, що ілюструє прийом безпровідного сигналу; Фіг.9 - блок-схема, що ілюструє реалізацію фільтра з кінцевим імпульсним відкликом; Фіг.10 - блок-схема варіанта здійснення компонента оцінки каналу та об'єднання; Фіг.11 - блок-схема способу для використання адаптивного компенсатора при прийомі безпровідного сигналу мобільною станцією і Фіг.12 - блок-схема способу обробки безпровідного сигналу з використанням компонента оцінки каналу та об'єднання. Розкритий спосіб оцінювання сигналу, що передається в безпровідній системі зв'язку. Приймається безпровідний сигнал, який включає в себе канал пілот-сигналу. Безпровідний сигнал може включати в себе один або більше сигналів додаткових каналів. Безпровідний сигнал обробляється з використанням вхідного каскаду багатовідвідного приймача для формування множини вихідних сигналів вхідного каскаду. Потім виконується оцінювання каналу по множині вихідних сигналів вхідного каскаду для одержання множини канальних оцінок. Канальні оцінки потім використовуються для об'єднання множини вихідних сигналів вхідного каскаду в об'єднаний сигнал. Об'єднаний сигнал потім фільтрується з використанням компенсатора для забезпечення оцінки сигналу, що передається. Компенсатор містить фільтр з множиною відводів, які адаптуються з використанням адаптивного алгоритму, який використовує оцінений пілот-сигнал, оцінка якого одержана з прийнятого безпровідного сигналу. Канал пілот-сигналу передається в безпровідному сигналі, який може включати в себе, щонайменше, один інший канал. Оцінений пілотсигнал виділяється і вводиться в адаптивний алгоритм. Як адаптивний алгоритм можуть використовуватися різні алгоритми, наприклад, ітеративний алгоритм. 88605 8 Спосіб може бути реалізований в різних приймачах системи зв'язку. Наприклад, спосіб може бути реалізований в мобільній станції. Безпровідний сигнал може включати в себе ортогональні та неортогональні канали. Спосіб також може бути реалізований в базовій станції. Для реалізації компенсатора може бути використаний цифровий фільтр. Можливим цифровим фільтром, який може бути використаний, є фільтр з кінцевою імпульсною характеристикою (КІХфільтр). Також може бути використаний фільтр . з нескінченною імпульсною характеристикою (НІХфільтр). Крім того, фільтрація може виконуватися в частотній області. Різні критерії адаптації можуть використовуватися з адаптивним алгоритмом. В одному варіанті здійснення адаптивний алгоритм може використовуватися однократно на кожний символьний інтервал пілот-сигналу для оновлення даних для відводів. Адаптивний алгоритм може використовуватися N разів на кожний символьний інтервал пілот-сигналу для оновлення даних для відводів, де N - будь-яке позитивне ціле число. В іншому варіанті здійснення адаптивний алгоритм може використовуватися однократно на кожний Nий символьний інтервал пілот-сигналу оновлення даних для відводів, де N - будь-яке позитивне ціле число. Адаптивний алгоритм може продовжувати адаптувати нові значення відводів, доки нові значення для відводів не будуть збігатися, або може продовжувати адаптувати їх протягом деякого періоду часу. Адаптивний алгоритм може розпочати адаптацію, коли умови каналів змінюються. Також заявлена мобільна станція для використання в системі безпровідного зв'язку. Мобільна станція містить адаптивний компенсатор для оцінювання сигналу, що передається. Мобільна станція містить, щонайменше, одну антену для прийому безпровідного сигналу та приймач, зв'язаний електронними засобами з, щонайменше, однією антеною. Мобільна станція також містить вхідний каскад багатовідвідного приймача, який забезпечує множину вихідних сигналів вхідного каскаду. Оцінювання каналу виконується по множині вихідних сигналів вхідного каскаду для одержання множини канальних оцінок. Канальні оцінки використовуються для об'єднання множини вихідних сигналів вхідного каскаду в об'єднаний сигнал. Об'єднаний сигнал потім фільтрується з використанням компенсатора для забезпечення оцінки переданого сигналу. Компенсатор використовує об'єднаний сигнал і містить фільтр з множиною відводів, які адаптуються за рахунок використання адаптивного алгоритму, який використовує оцінки пілот-сигналу, оцінені з прийнятого безпровідного сигналу. Канал пілот-сигналу передається з, щонайменше, одним іншим каналом. Мобільна станція також містить компонент для виділення оціненого пілот-сигналу і для видачі оціненого пілотсигналу в адаптивний алгоритм. Компоненти мобільної станції також застосовні і можуть бути використані з іншими приймальними системами. Також в узагальненому вигляді заявлений пристрій для використання в системі безпровідного зв'язку, який містить адаптивний ком 9 пенсатор для оцінювання переданого сигналу. Пристрій може бути реалізований в мобільній станції, в базовій станції або в будь-якій іншій системі, в якій необхідно приймати та обробляти безпровідний сигнал. Заявлені системи та способи можуть бути використані для компенсації багатопроменевого поширення. Багатопроменеві сигнали є копіями одного і того самого безпровідного сигналу, які генеруються відбиттями від конструкцій та природних формацій. Сигнали багатопроменевого поширення можуть мати фазові зсуви, які обумовлюють компенсацію сигналів одного з одним в визначених місцеположеннях. Втрати сигналу внаслідок фазової компенсації сигналів багатопроменевого поширення відомі як завмирання сигналу. Завмирання являє собою проблему в системах безпровідного зв'язку, оскільки воно призводить до переривань передач користувача. Наприклад, різні зумовлені багатопроменевим поширенням копії одного сигналу безпровідного зв'язку, що передається пристроєм безпровідного зв'язку, можуть формуватися за рахунок відбиття від дерев та будівель. Ці копії, зумовлені багатопроменевим поширенням, можуть комбінуватися і компенсувати одна одну внаслідок фазових зсувів. Заявлені системи та способи можуть також бути корисними при оптимізації потужності, що використовується в системі зв'язку. Системи множинного доступу з кодовим розділенням каналів (МДКР) з вигодою використовують керування потужністю. Адекватне відношення С/Ш повинно підтримуватися таким чином, щоб сигнал міг бути виділений з шумів. Оскільки сигнали МДКР не розділяються за частотою або за часом для заданого напрямку лінії зв'язку, то шумова складова відношення С/Ш включає в себе всі інші прийняті сигнали МДКР. Якщо потужність окремого сигналу МДКР дуже висока, то він ефективно заглушає всі інші сигнали МДКР. Керування потужністю використовується у висхідній лінії зв'язку (в передачі від термінала до базової станції) і в низхідній лінії зв'язку (в передачі від базової станції до термінала). У висхідній лінії зв'язку керування потужністю використовується для підтримки відповідного рівня потужності для всіх сигналів користувача, що приймаються в базовій станції. Рівень потужності цих сигналів, що приймаються МДКР повинен мінімізуватися, але все ще залишатися досить потужним, щоб підтримувати відповідне відношення С/Ш. У низхідній лінії зв'язку керування потужністю використовується для підтримки відповідного рівня потужності для всіх сигналів, що приймаються в різних терміналах. Це мінімізує взаємні перешкоди між користувачами в одній і тій самій комірці, зумовлені сигналами багатопроменевого поширення. Це також мінімізує взаємні перешкоди між користувачами в сусідніх комірках. Системи МДКР динамічно керують потужністю передачі базової станції і терміналів для підтримки відповідного рівня потужності у висхідній і у низхідній лініях зв'язку. Динамічне керування також застосовується з використанням методів керування в розімкненому контурі і в замкненому контурі, які відомі в техніці. 88605 10 Дальність дії системи МДКР безпосередньо пов'язана із загальним рівнем потужності сигналів, що приймаються, оскільки кожний додатковий сигнал додає шум до всіх інших сигналів. Компонент шуму у відношенні С/Ш, зумовлений сигналами користувача, знижується, коли середній рівень потужності, що приймається, знижується. Методи, які знижують потужність сигналу МДКР від пристрою зв'язку, безпосередньо збільшують дальність дії системи МДКР. Рознесений прийом є одним з методів, що використовуються для мінімізації необхідної потужності сигналу. Зниження потужності сигналу також знижує витрати пристрою зв'язку користувача при збільшенні терміну служби батарей живлення та дальності. Оптимізація потужності, що використовується, може мати додаткові вигоди в системах з високою швидкістю передачі даних, де високі швидкості передачі даних можуть підтримуватися, тільки якщо може досягатися відповідне відношення С/Ш. Системи зв'язку використовуються для передачі інформації від одного пристрою до іншого. Перед передачею інформація кодується в формат, придатний для передачі по каналу зв'язку. Канал зв'язку може являти собою лінію передачі або вільний простір між передавачем та приймачем. Коли сигнал поширюється в каналі, сигнал, що передається, спотворюється за рахунок неідеальності каналу. Крім того, сигнал відчуває спотворення під впливом шумів та взаємних перешкод, що відчуваються в процесі передачі. Прикладом перешкоди, що звичайно має місце в обмежених по смузі каналах, є міжсимвольна перешкода (МСП). МСП виникає як результат розширення імпульсу символу, що передається, внаслідок дисперсійного характеру каналу, що призводить до перекривання імпульсів сусідніх символів. Дисперсійний характер каналу зумовлений багатопроменевим поширенням сигналів. У приймачі сигнал обробляється і переводиться у вихідну форму, до здійснення кодування. Як передавач, так і приймач проектуються для мінімізації ефектів неідеальності каналів та перешкод. Різні форми виконання приймачів можуть бути реалізовані для компенсації шумів та перешкод, зумовлених передавачем і каналом. Наприклад, компенсатор характеризує собою звичайний засіб, що застосовується для вирішення цих проблем. Компенсатор може бути реалізований трансверсальним фільтром, тобто лінією затримки з Тсекундними відводами (де Τ - розділення за часом фільтра компенсатора). Сигнальний вміст відводів зважується і підсумовується для генерації оцінкисигналу, що передається. Коефіцієнти відводів настроюються для компенсації вимірювань в радіоканалі. У загальному випадку метод адаптивної компенсації використовується, коли коефіцієнти відводів безперервно та автоматично підстроюються. Адаптивний компенсатор використовує призначений алгоритм, такий як алгоритм найменших середніх квадратів (НСК) або рекурсивний алгоритм найменших квадратів (РНК) для визначення коефіцієнтів відводів. Сигнал подається на пристрій розділення каналів, такий як блок дескремблювання і стиснення, і на пристрій прийнят 11 тя рішення, такий як декодер або символьний обмежувач. Здатність приймача виявляти сигнал в присутності шумів основана на відношенні потужності прийнятого сигналу до потужності шуму, яке звичайно називається відношенням С/Ш або відношенням потужності на несучій до перешкоди (Н/П). Використання в техніці цих або подібних термінів часто взаємно замінюється, однак їх значення одне і те саме. Відповідно, будь-яке посилання на відношення Н/П повинне розумітися фахівцями як таке, що включає в себе узагальнений принцип визначення впливів шумів в різних точках системи зв'язку. Компенсатори в системах безпровідного зв'язку призначаються для підстроювання до умов в каналі, що змінюються в часі. По мірі того як характеристики каналу змінюються, компенсатор настроює свій відклик відповідним чином. Такі зміни можуть включати в себе зміни в середовищі передачі або відносний рух передавача і приймача, а також інші умови. Як описано вище, алгоритми адаптивної фільтрації часто використовуються для модифікації коефіцієнтів відводів компенсатора. Компенсатори, які використовують адаптивні алгоритми, в загальному випадку називаються адаптивними компенсаторами. Термін «зразковий» використовується виключно як такий, що служить «для прикладу, ілюстрації». Будь-який варіант здійснення, описаний тут як «зразковий», не обов'язково повинен розумітися як переважний в порівнянні з іншими варіантами здійснення. У той час як різні аспекти варіантів здійснення представлені на кресленнях, креслення не обов'язково представлені в масштабі, якщо це не обумовлено конкретно. Подальший опис розкриває наведені для прикладу варіанти здійснення приймача системи зв'язку з адаптивним компенсатором, починаючи з попереднього опису системи безпровідного зв'язку з розширеним спектром. Потім описані базова станція та мобільна станція, а також здійснювані між ними передачі. Потім представлені компоненти варіанта здійснення абонентського блока. Показані та описані функціональні блок-схеми для пояснення передачі та прийому безпровідного сигналу. Також викладені детальні відомості, що стосуються компенсатора та адаптивного алгоритму в приймальній системі. В опис, що відноситься до обробки сигналів, включені ілюстрації та математичні висновки. Пояснений та проілюстрований компонент оцінювання каналу та об'єднання. Потім описаний процес використання компенсатора та адаптації внутрішніх компонентів компенсатора. Хоча в описі наведений для прикладу варіант здійснення представлений як типовий, однак альтернативні варіанти здійснення можуть реалізовувати різні аспекти винаходу без відхилення від обсягу даного винаходу. Конкретніше, даний винахід застосовний в системі обробки даних, системі безпровідного зв'язку мережі мобільного міжмережевого протоколу (mobile IP) і в будь-якій іншій системі, де є необхідність приймати та обробляти безпровідний сигнал. 88605 12 Зразковий варіант здійснення, що розглядається, використовує систему безпровідного зв'язку з розширеним спектром. Системи безпровідного зв'язку широко використовуються для забезпечення різних типів зв'язку, таких як голосова, передача даних тощо. Ці системи можуть базуватися на методі множинного доступу з кодовим розділенням каналів (МДКР), методі множинного доступу з часовим розділенням каналів (МДЧР) і деяких інших методах модуляції. Система МДКР забезпечує деякі переваги перед іншими типами систем, включаючи збільшення ємності системи. Система може бути спроектована для підтримки одного або більше стандартів, таких як «TIA/EIA/IS-95-B Mobile Station-Base Station Compatibility Standard for Dual-Mode Wideband Spread Spectrum Cellular System», що згадується в даному описі як стандарт IS-95; стандарт, запропонований консорціумом «3rd Generation Partnership Project», що згадується в даному описі як стандарт 3GPP і втілений в комплекті документів, що включає документи №3GPP TS 25.211, 3GPP TS 25.212, 3GPP TS 25.213 та 3GPP TS 25.214; стандарт 3GPP TS 25.302, що згадується в даному описі як стандарт W-CDMA; стандарт, запропонований консорціумом «3rd Generation Partnership Project 2», що згадується далі як стандарт 3GRP2; і стандарт TR-45.5, що згадується як cdma2000, що раніше називався IS-2000 МС. Перелічені вище стандарти включені в даний опис за допомогою посилання. Кожний стандарт конкретно визначає обробку даних для передачі від базової станції до мобільної станції і навпаки. Як зразковий варіант здійснення в нижченаведеному описі розглядається система зв'язку з розширеним спектром, сумісна із стандартом cdma2000 протоколів. Альтернативні варіанти здійснення можуть включати в себе інший стандарт. Описані системи та способи можуть використовуватися в системах зв'язку з високою швидкістю передачі даних. У нижченаведеному описі конкретна система з високою швидкістю передачі даних описана для наочності. Можуть бути реалізовані альтернативні системи, які забезпечують передачу інформації з високими швидкостями передачі даних. Для систем зв'язку МДКР, призначених для передачі на високих швидкостях даних, таких як система зв'язку HDR (з високою швидкістю передачі даних), може використовуватися схема запиту змінної швидкості передачі для здійснення зв'язку з максимальною швидкістю передачі даних, яка може підтримуватися при конкретному відношенні Н/П. Система зв'язку HDR в типовому випадку проектується для забезпечення відповідності одному або більше стандартам, такому як стандарт «cdma2000 High Rate Packet Data Air Interface Specification», 3GPP2 C.S0024, Version 2, October 27, 2000, опублікований консорціумом «3rd Generation Partnership Project 2». Зміст вищезгаданого стандарту включений в даний опис за допомогою посилання. Приймач в наведеній для прикладу системі зв'язку HDR може використовувати схему запиту змінної швидкості передачі даних. Приймач може 13 бути реалізований в абонентській станції, що здійснює зв'язок в наземній мережі передачі даних шляхом передачі даних по висхідній лінії зв'язку до базової станції (показано нижче). Базова станція приймає дані і маршрутизує їх через контролер базової станції (КБС) (не показаний) в наземну мережу. І навпаки, передачі від абонентської станції можуть маршрутизуватися з наземної мережі до базової станції через КБС і передаватися від базової станції до абонентського блока по низхідній лінії зв'язку. На Фіг.1 представлений приклад системи 100 зв'язку, яка підтримує множину користувачів і має можливість реалізації, щонайменше, деяких аспектів описаних варіантів здійснення. Будь-який з множини алгоритмів і методів може бути використаний для планування передач в системі 100. Система 100 забезпечує інформаційний обмін для ряду комірок 102A-102G, кожна з яких обслуговується відповідною базовою станцією 104A-104G, відповідно. У наведеному для прикладу варіанті здійснення деякі з базових станцій 104 мають множину приймальних антен, а інші мають тільки одну приймальну антену. Аналогічно, деякі з базових станцій 104 мають множину передавальних антен, а інші мають одиночні передавальні антени. Немає обмежень на комбінації передавальних антен та приймальних антен. Тому можливі варіанти, коли базова станція 104 має множину передавальних антен та одиночну приймальну антену, або має множину приймальних антен та одиночну передавальну антену, або має одну або множину передавальних та приймальних антен. Термінали 106 в зоні покриття можуть бути нерухомими (тобто стаціонарними) або мобільними. Як показано на Фіг.1, різні термінали розосереджені в системі. Кожний термінал 106 здійснює зв'язок з, щонайменше, одною і, можливо, більше базових станцій 104 по низхідній лінії зв'язку і висхідній лінії зв'язку в будь-який конкретний момент часу залежно, наприклад, від того, чи використовується гнучка передача обслуговування, або чи призначений термінал і чи працює він для (одночасного або послідовного) прийому множини передач від множини базових станцій. Гнучка передача обслуговування в системах зв'язку МДКР добре відома в техніці і детально описана в патенті США 5101501 на «Спосіб та систему для забезпечення гнучкої передачі обслуговування в стільниковій телефонній системі МДКР», право на який передане правонаступнику даного винаходу. Низхідна лінія зв'язку відноситься до передачі від базової станції 104 до термінала 106, а висхідна лінія зв'язку відноситься до передачі від термінала 106 до базової станції 104. У наведеному для прикладу варіанті здійснення деякі з терміналів 106 мають множину приймальних антен, а інші мають тільки одну приймальну антену. На Фіг.1 базова станція 104А передає дані до терміналів 106А та 106J по низхідній лінії зв'язку, базова станція 104В передає дані до терміналів 106В та 106J, базова станція 104С передає дані до термінала 106С. На Фіг.2 представлена блок-схема базової станції 202 та мобільної станції 204 в системі 100 88605 14 зв'язку. Базова станція 202 здійснює безпровідний зв'язок з мобільною станцією 204. Як зазначено вище, базова станція 202 передає сигнали до мобільних станцій 204, які приймають сигнали. Крім того, мобільні станції 204 можуть також передавати сигнали до базової станції 202. На Фіг.3 представлена блок-схема базової станції 202 та мобільної станції 204, що ілюструє низхідну лінію 302 зв'язку та висхідну лінію 304 зв'язку. Низхідна лінія 302 зв'язку відноситься до передач від базової станції 202 до мобільної станції 204у а висхідна лінія 304 зв'язку відноситься до передач від мобільної станції 204 до базової станції 202. На Фіг.4 представлена блок-схема каналів у варіанті здійснення низхідної лінії 302 зв'язку. Низхідна лінія 302 зв'язку включає в себе канал 402 пілот-сигналу, канал 404 синхронізації, канал 406 пошукового виклику і канал 408 трафіка. Низхідна лінія 302 зв'язку, показана на кресленні, ілюструє тільки можливий варіант здійснення низхідної лінії 302 зв'язку, і зрозуміло, що інші канали можуть бути додані або виключені з низхідної лінії 302 зв'язку. Згідно із стандартом CDMA, описаним в «TIA/EIA/IS-95-B Mobile Station-Base Station Compatibility Standard for Dual-Mode Wideband Spread Spectrum Cellular System», кожна базова станція 202 передає канал 402 пілот-сигналу, канал 404 синхронізації, канал 406 пошукового виклику та канал 408 трафіка своїм користувачам. Канал 402 пілот-сигналу являє собою немодульований сигнал, безпосередньо розширений по спектру послідовністю, що безперервно передається , кожною базовою станцією 202. Канал 402 пілотсигналу дозволяє кожному користувачу здійснювати захоплення синхронізації каналів, що передаються базовою станцією 202, і забезпечує фазову опору для когерентної демодуляції. Канал 402 пілот-сигналу також забезпечує засіб для порівнянь рівнів сигналів між базовими станціями 202 для визначення, коли здійснювати передачу обслуговування між базовими станціями 202 (наприклад, при переміщенні між комірками 102). Канал 404 синхронізації передає інформацію синхронізації та конфігурації системи до мобільної станції 204. Канал 406 пошукового виклику використовується для здійснення зв'язку з мобільними станціями 204, коли їм не виділений канал 408 трафіка. Канал 406 пошукового виклику використовується для посилання пошукових викликів, тобто повідомлень про вхідні виклики, до мобільних станцій 204. Канал 408 трафіка використовується для передачі даних і мови користувача. Повідомлення сигналізації також посилаються по каналу 408 трафіка. На Фіг.5 показана блок-схема каналів у варіанті здійснення висхідної лінії 304 зв'язку. Висхідна лінія 304 зв'язку може містити канал 502 пілотсигналу, канал 504 доступу та канал 506 трафіка. Висхідна лінія 304 зв'язку показана тільки як можливий варіант здійснення висхідної лінії зв'язку, і зрозуміло, що інші канали можуть бути додані або виключені з висхідної лінії 304 зв'язку. 15 Висхідна лінія 304 зв'язку, показана на Фіг.5, включає в себе канал 502 пілот-сигналу. Потрібно нагадати, що запропоновано системи безпровідного зв'язку третього покоління (3G), в яких використовується канал 502 пілот-сигналу висхідної лінії 304 зв'язку. Наприклад, в запропонованому на сьогодні стандарті cdma2000 мобільна станція 204 передає канал R-PICH (канал пілот-сигналу зворотної лінії зв'язку), який базова станція 202 використовує для первинного виявлення, часової синхронізації, відновлення когерентної опори в багатовідвідному приймачі і у вимірюваннях, необхідних для керування потужністю. Таким чином, передбачені в ньому системи та способи застосовні для пілот-сигналів, що передаються в низхідній лінії 302 зв'язку і у висхідній лінії 304 зв'язку. Канал 504 доступу використовується мобільною станцією 204 для здійснення зв'язку з базовою станцією 202, коли мобільна станція 204 не має виділеного їй каналу 506 трафіка. Канал 506 трафіка висхідної лінії зв'язку використовується для передачі даних і мови користувача. Повідомлення сигналізації також посилаються по каналу 506 трафіка висхідної лінії зв'язку. Варіант здійснення мобільної станції 204 показаний в системі 600 абонентського блока, проілюстрованій на функціональній блок-схемі на Фіг.6. Система 600 включає в себе процесор 602, який керує роботою системи 600. Процесор 602 також може згадуватися як центральний процесорний блок (ЦПБ). Пам'ять 604, яка може включати в себе як постійну пам'ять (ПЗП), так і оперативну пам'ять (ОЗП), забезпечує команди і дані для процесора 602. Частина пам'яті 604 може також включати в себе енергонезалежну оперативну пам'ять. Система 600, яка в типовому випадку реалізована в пристрої безпровідного зв'язку, такому як стільниковий телефон, також включає в себе корпус 606, що містить передавач 608 і приймач 610 для забезпечення передачі і прийому даних, таких як аудіосигналів, що передаються, між системою 600 та віддаленим місцеположенням, таким як контролер стільникової комірки або базова станція 202. Передавач 608 і приймач 610 можуть бути об'єднані в приймач-передавач 612. Антена 614 прикріплена до корпусу 606 та електрично зв'язана з приймачем-передавачем 612. Додаткові антени (не показані) також можуть використовуватися. Робота передавача 608, приймача 610 та антени 614 добре відома в техніці і не вимагає докладного опису. Система 600 також містить детектор 616 сигналів, що використовується для детектування і визначення рівня сигналів, що приймаються приймачем-передавачем 612. Детектор 616 сигналів детектує такі сигнали, включаючи повну енергію, енергію пілот-сигналу, що припадає на кодовий елемент псевдо шумової (ПШ) послідовності, спектральну щільність енергії та інші сигнали, як відомо в техніці. Блок 626 зміни стану системи 600 керує станом пристрою безпровідного зв'язку на основі поточного стану і додаткових сигналів, що приймаються приймачем-передавачем 612, і детектуються детектором 616 сигналів. Пристрій 88605 16 безпровідного зв'язку може працювати в будьякому з ряду станів. Система 600 також містить системний блок 628 визначення, що використовується для керування пристроєм безпровідного зв'язку і визначення, на яку систему провайдера послуг повинен перейти пристрій безпровідного зв'язку, якщо цей блок визначив, що система провайдера послуг, яка використовується в даний момент, стала неадекватною. Різні компоненти системи 600 зв'язані між собою за допомогою системи 630 шин, яка може містити шину живлення, шину сигналів керування та шину сигналізації про статус, в доповнення до шини передачі даних. Однак для наочності різні шини показані на Фіг.6 як система 630 шин. Система 600 також може містити цифровий процесор 607 сигналів для використання в обробці сигналів. Фахівцям в даній галузі техніки повинно бути зрозуміло, що система 600, показана на Фіг.6, являє собою функціональну блок-схему, а не містить переліку конкретних компонентів. Способи, розкриті в даному описі, призначені для використання в адаптивному компенсаторі в приймачі системи зв'язку, можуть бути реалізовані у варіанті здійснення абонентського блока 600. Розкриті системи та способи також можуть бути реалізовані в інших системах зв'язку з приймачем, таких як базова станція 202. Якщо базова станція 202 використовується для реалізації розкритих систем та способів, то функціональна блок-схема, представлена на Фіг.6, може бути використана для опису компонентів в функціональній блок-схемі базової станції 202. На Фіг.7 показана функціональна блок-схема, що ілюструє передачу безпровідного сигналу. Як показано, безпровідний сигнал включає в себе канал 702 пілот-сигналу та інші ортогональні канали 704. Додаткові ортогональні канали 706 можуть бути також включені в безпровідний сигнал. Приклади неортогональних каналів включають канал синхронізації (SSC) в стандарті WCDMA, і канали, скрембльовані вторинними кодами скремблювання (QoC) в стандарті cdma2000. Ортогональні канали подаються на компонент 708 ортогонального розширення. Як ортогональні, так і неортогональні канали потім подаються на компонент 710 посилення каналу, який додає посилення каналу. Вихідні сигнали компонентів 710 посилення каналу підсумовуються разом, як показано суматором 712. Як показано на Фіг.7, неортогональний канал може бути мультиплексованим з використанням часового ущільнення (TDM) 711. В інших варіантах здійснення один або більше ортогональних каналів можуть бути мультиплексованими з використанням часового ущільнення. Неортогональні канали 706 не мають компонентів з ортогональним розширенням. Деякі неортогональні канали 706 (наприклад, канал синхронізації) можуть подаватися безпосередньо в компонент 710 посилення каналу. Інші неортогональні канали 706 (наприклад, канали, розширені з використанням квазіортогональних послідовностей, згідно з cdma2000) розширяються неортогональним способом і потім вводяться в компонент 17 710 посилення каналу. Вихідний сигнал компонента 710 посилення каналу підсумовується за допомогою суматора 712. Підсумований сигнал вводиться в компонент 714 скремблювання псевдовипадковим шумом (ПШ). Фільтр 716 базової смуги одержує вихідний сигнал з компонента 714 ПШ скремблювання і подає відфільтрований вихідний сигнал 723 в передавач 718. Передавач 718 містить антену 720. Безпровідний сигнал потім вводиться в радіоканал 722. Функціональна блок-схема, показана на Фіг.7, яка ілюструє передачу безпровідного сигналу, може бути реалізована різними компонентами. Наприклад, базова станція 202 втілює одну форму блок-схеми, поданої на Фіг.7. Крім того, мобільна станція 204 також реалізовує деяку форму блоксхеми передачі. Фіг.8 представляє функціональну блок-схему, яка ілюструє прийом безпровідного сигналу 801. Приймач 802 приймає безпровідний сигнал 801 з використанням антени 804. Прийнятий сигнал містить спотворену копію каналу пілот-сигналу, що передається. Прийнятий сигнал подається в узгоджений фільтр 806, який узгоджений з імпульсною характеристикою фільтра базової смуги в передавачі. Вихідний сигнал 808 з узгодженого фільтра 806 все ще містить всі різні канали, які були передані. Вихідний сигнал 808 узгодженого фільтра 806 подається на компонент 807 оцінки каналів та об'єднання, який виконує оцінку каналу і об'єднання для вихідного сигналу 808 з узгодженого фільтра 806. Компонент 807 оцінки каналів та об'єднання містить вхідний каскад багатовідвідного приймача, блок оцінки каналу і блок об'єднання. Компонент 807 оцінки каналів та об'єднання описаний детальніше нижче з посиланням на Фіг.10. Вихідний сигнал 809 компонента 807 оцінки каналів та об'єднання вводиться в блок 810 компенсатора. Компенсатор 810 коректує спотворення і генерує оцінку сигналу, що передається. Компенсатор 810 також враховує стани каналу, що змінюються в часі. Компенсатор 810 містить фільтр, реалізований шляхом використання ряду відводів 811 компенсатора. Відводи можуть бути еквідистантними або нееквідистантними. Вихідний сигнал 812 компенсатора подається в компонент 814 ПШ дескремблювання і компонент 816 стиснення. Канал 818 трафіка виводиться з компонента 816 стиснення і потім декодується компонентом 820 декодування. Зрозуміло, що канал 702 пілот-сигналу та інші канали 704 також виводяться з компонента 816 стиснення. Компонент 816 стиснення виділяє канал 702 пілотсигналу та інші канали і забезпечує окремі оцінки sl ( t ) = 88605 18 для каналу пілот-сигналу та інших каналів. Різні канали потім можуть зазнавати подальшої обробки 820. Компонент 822 адаптивної фільтрації здійснює адаптацію компенсатора 810. Оцінений пілотсигнал 824 подається компонентом 816 стиснення на компонент 822 адаптивного алгоритму. Компонент 822 адаптивного алгоритму містить апріорну інформацію про канал пілот-сигналу, що передається. У системах безпровідного зв'язку загальноприйнятою є передача послідовності апріорно відомих символів по каналу пілот-сигналу. Оцінений пілот-сигнал 824, що вводиться в компонент 822 адаптивного алгоритму, може являти собою пілотсигнал, мультиплексований з використанням кодового ущільнення. Переважним чином, компонент 822 адаптивного алгоритму може оновлювати дані відводів 811, коли приймач 802 здійснює прийом безпровідного сигналу 801, який включає в себе канал пілот-сигналу та інші канали. Таким чином, хоча в інших системах, що використовуються в цей час, адаптивні компенсатори адаптуються на основі сигналів, які включають в себе тільки канал пілот-сигналу, системи та методи, розкриті в даному описі, можуть здійснювати навчання та адаптацію навіть у випадку, коли канал пілот-сигналу існує одночасно з іншими каналами. На компонент 822 адаптивного алгоритму можуть подаватися додаткові параметри 823 алгоритму. Відомий опорний сигнал може являти собою частину параметрів 823 алгоритму, які подаються на компонент 822 адаптивного алгоритму. Розмір кроку адаптації може також включатися як частина параметрів 823 алгоритму. Залежно від конкретного алгоритму, що використовується, параметри 823 алгоритму будуть змінюватися, як це повинно бути зрозуміло фахівцям в даній галузі техніки. Як описано нижче, компонент 822 адаптивного алгоритму продовжує адаптацію компенсатора 810 для забезпечення оцінки сигналу, що передається, і для забезпечення зміни компенсатора 810 по мірі необхідності. Компонент 822 адаптивного алгоритму оновлює вагові коефіцієнти 826 фільтра компенсатора, які використовуються компенсатором 810. Вагові коефіцієнти 826 відповідають відводам 811 компенсатора. З посиланнями на Фіг.7 та 8 нижче представлений математичний опис різних сигналів, формул та алгоритмів, які можуть використовуватися. Комплексний аналоговий сигнал 723 базової смуги, який повинен передаватися з фільтра 716 базової смуги, показаного на Фіг.7, може бути записаний згідно з формулою (1). Змінні та параметри формули (1) наведені в Таблиці 1. У Таблиці 1 позначення КОЗР означає коефіцієнт ортогонального змінного розширення. КОЗР-коди також згадуються як коди розширення. N-1 +¥ å å gu[k] × wN[n mod N] × du [k] × PN[n] × h(t - nTc ) u u =0n=-¥ формула 1 19 n Ν k Тс gu[k] WuN [n mod Ν] = = du[k] 88605 індекс кодового елемента коефіцієнт розширення КОЗР [η/Ν] період кодових елементів цифрове посилення для коду u кодовому елементі η ортогональний код u довжиною N кодових елементів з індексом кодового елемента (n mod N) комплексний символ даних для коду u в кодовому елементі n = ¥ òh 2 ( f ) × dt = 1 комплексний ПШ-кодовий елемент з індексом n = H(t) d(I)[k ] + j × d(Q) [k ] u u = = PN[n] 20 Тх-фільтр базової смуги = 1 PN (I) [n ] + j × PN ( Q ) [n] -¥ Функція для дійсного ослаблення променя і показана в формулі (2). Затримка поширення променя і показана в формулі (3). Комплексне ослаблення променя і показане в формулі (4). У формулі (4) параметр fc означає несучу частоту. Параметр d0 означає номінальну відстань. Параметр с означає швидкість світла. ai(t) формула 2 формула 3 ti(t) - j2pfc d0 Tc формула 4 ai ( t ) = ai ( t ) × e Можуть бути прийняті допущення для спрощення і/або виконання необхідних обчислень. Передбачається, що на періоді адаптації компенсатора має місце квазістатичне завмирання. Також передбачається коефіцієнт Ω дискретизації з підвищеною частотою. Затримка поширення променя і може бути виражена, як показано в формулі (5). Функція максимального рівня може бути виражена для li, як показано в формулі (6). Параметр Тс в формулі (6) означає період кодових елементів. xi [m] = Pos[×] W[m] xi[m] dn[k] = = = = = N-1 N-1 +¥ i= 0 Функція максимального рівня, використана для li, як показано в формулі (6), може бути легко виражена через функцію мінімального рівня без втрати спільності. Вихідний сигнал узгодженого фільтра 806 може бути виражений, як показано в формулі (7). Вираз хі[т] в формулі (7) представляє цифрові вибірки при СхΩ після узгодженої фільтрації, а також представляє вхідні вибірки для компонента 807 оцінювання каналу та об'єднання. Змінні та параметри, що містяться в формулі (7), наведені в Таблиці 2. Щодо формули (7) та Таблиці 2, часове положення сигналу повинно бути зміщене на затримки променів. Фільтр формування імпульсу, згаданий в Таблиці 2, іноді називається передавальним фільтром базової смуги. формула 5 ti(t)» ti é W ×t i ù li = ê формула 6 ú ë Tc û u = 0n = -¥ N å ai × å å du [k ] × Wu [n mod N] × PN[n] × pos [m - nW - li ] формула 7 автокореляція фільтра формування імпульсу при CxQ шум цифрові вибірки при CxΩ, після узгодженої фільтрації вхідні вибірки компенсатора містить цифрове посилення gu[k] для простоти Корисний сигнал, що виводиться з виходу 824 компонента 816 стиснення в адаптивний алгоритм 822, являє собою r[0;n]=1, що відповідає пілотсигналу. Цей сигнал з виходу 824 компонента 816 стиснення вводиться в адаптивний алгоритм 822, який адаптує компенсатор 810. Як згадано вище, вхідний сигнал 824 в адаптивний алгоритм 822 являє собою оцінку пілот-сигналу, мультиплексованого з кодовим ущільненням. Різні адаптивні алгоритми можуть бути використані для адаптації відводів 811 компенсатора 810. Для адаптації компенсатора 810 може бути використаний ітераційний алгоритм. Одним з ал горитмів, які можуть бути використані, є алгоритм найменших середніх квадратів (НСК). Іншим можливим алгоритмом, який може бути використаний, є рекурсивний алгоритм найменших квадратів (РНК). Також може використовуватися калмановський фільтр. Також можуть використовуватися неітераційні алгоритми. Фахівцям в даній галузі техніки повинно бути зрозуміло, що інші адаптивні алгоритми також можуть бути використані для адаптації відводів 811 компенсатора 810. Вхідний сигнал q[k] компенсатора може бути записаний, як показано нижче. Член r[m] є вихідним сигналом блока об'єднання при CxΩ. Пара 21 88605 метр gi являє собою оцінку каналу для і-го відводу. Параметр μ являє собою зміщення часового положення відводу. q[k; m] = 22 r [m] = Q -i å g ic × xi [m + mi ] формула 8 i= 0 N-i N å PNc [k × N + n] × W0 [n] × r[(k × N + n) × W + m + D] формула 9 n= 0 Для систем та способів, що описуються, символ пілот-сигналу, що приймається, і відомий опорний сигнал використовуються для оновлення значень на відводах 811 компенсатора на основі адаптивного алгоритму 822. Реалізація показана на Фіг.8. Якщо використовується алгоритм НСК, то коефіцієнти компенсатора (або відводів 811) можуть оновлюватися, як показано в формулі (8), i де β - розмір кроку алгоритму, g[k ] - сигнальний вектор на вході компенсатора, rH r ˆ [k ] s= w [k ] × q[k ] ˆ Î (k ) = 1 - s[k ] . та Компоненти i сигнального вектора g[k ] можуть бути записані як g[k;m], причому m означає індекс компонента. 1 1 1 w [k + 1] = w [k ] + b × e¢(k ) × q[k ] формула 10 В одному варіанті здійснення компенсатор 810 може бути реалізований за допомогою фільтра з кінцевою імпульсною характеристикою (КІХ). На Фіг.9 показана блок-схема, що ілюструє реалізацію КІХ-фільтра 900. Як показано на кресленні, вхідним сигналом фільтра є хi, а вихідним сигналом є хе. Вхідний сигнал х, включає в себе як присутню вхідну вибірку, так і попередні вибірки, як показано блоками 902 затримки. Вектор w представляє відводи фільтра. Вихідний сигнал може бути обчислений відповідно до рівняння (9). Рівняння (9) може бути записане в матричній формі, як показано в формулі (10). Крім КІХ-фільтра, в компенсаторі 810 можуть бути використані й інші компоненти. Наприклад, може використовуватися фільтр з нескінченною імпульсною характеристикою (НІХ). Крім того, фільтрація може здійснюватися в частотній області. x e (m) = m å w k × xi (m - k ) формула 11 k =0 x e (m) = X(m) × w формула 12 На Фіг.10 показана блок-схема варіанта здійснення компонента 807 оцінювання каналу та об'єднання. Компонент 807 оцінювання каналу та об'єднання містить вхідний каскад 1002 багатовідвідного приймача, відомий фахівцям в даній галузі техніки. Вхідний каскад 1002 багатовідвідного приймача містить множину відводів 1004. Кожний відвід 1004 зв'язаний з компонентом сигналу багатопроменевого поширення і має відповідне часове положення. На виході кожного відводу 1004 передбачений компонент 1006 оцінювання коефіцієнта каналу в складі блока 1005 оцінювання каналу. Кожний компонент 1006 оцінювання коефіцієнта каналу оцінює канал для відповідного часового положення. Всі вихідні сигнали відводів 1004 об'єднуються блоком 1008 об'єднан ня на основі оцінок каналу і часового положення для всіх відводів 1004. Блок 1008 об'єднання може виконувати об'єднання максимального відношення. Вихідний сигнал 809 блока 1008 об'єднання подається на компенсатор 810 для компенсації. На Фіг.11 представлена блок-схема способу 1100 використання адаптивного компенсатора 810 при прийомі безпровідного сигналу мобільною станцією 204. Спосіб за Фіг.11 також може бути використаний базовою станцією 202 та іншими типами приймачів в системі 100 безпровідного зв'язку. Приймається (1102) безпровідний сигнал, який включає в себе канал 402 пілот-сигналу та інші канали. Інші канали можуть включати в себе множину каналів, включаючи, без обмеження вказаним, канали трафіка 408, синхронізації 404 і пошукового виклику 406. Також в безпровідний сигнал, що приймається, можуть бути включені й інші канали. Канал пілот-сигналу та інші канали можуть передаватися безперервно. Крім того, канал пілотсигналу та інші канали можуть не передаватися безперервно. Крім того, якщо спосіб 1100 реалізовується в базовій станції 202, то буде включатися менше каналів. Наприклад, якщо безпровідний сигнал приймається базовою станцією 203, то безпровідний сигнал може включати в себе канали пілот-сигналу, трафіка і доступу. Як показано, спосіб 1100 можна легко адаптувати для використання в різних приймачах в системах 100 безпровідного зв'язку. Прийнятий сигнал фільтрується (1104) з використанням узгодженого фільтра 806. Вихідний сигнал узгодженого фільтра обробляється (1105) за допомогою компонента 807 оцінювання каналу та об'єднання. Вихідний сигнал 809 компонента 807 оцінювання каналу та об'єднання подається на компенсатор 810 для компенсації (1106). Як вказано вище, компенсатор 810 коректує спотворення та генерує оцінку переданого сигналу, а також обробляє стани каналу, що змінюються в часі. Компенсатор 810 включає в себе фільтр, реалізований з використанням ряду відводів 811, представлених в ньому позначенням w. Компенсатор 810 видає на відводи 811 поточні значення. Якщо значення на відводах 811 компенсатора оновлюються, то компенсатор може використовувати оновлені значення на відводах 811. Фахівцям в даній галузі техніки повинні бути зрозумілі різні способи, якими можна встановити наявність нових значень на відводах 811. Вихідний сигнал 812 компенсатора подається на компонент 814 ПШ дескремблювання, в якому здійснюється ПШ дескремблювання (1110) для одержання оцінок каналу пілот-сигналу та інших каналів. 23 Етапи, показані на Фіг.11, можуть виконуватися безперервно в процесі реалізації способу 1100. Таким чином, спосіб 1100 може продовжувати приймати (1102) безпровідний сигнал, може продовжувати фільтрацію (1104) з використанням узгодженого фільтра 806 і може виконувати інші показані етапи 1105, 1106, 1108, 1110 та 1112 в основному циклі обробки паралельно. Як показано на Фіг.8, адаптивний алгоритм 822 одержує оцінений канал пілот-сигналу з компонента 816 і використовує його в адаптивному процесі. Приймається рішення (1114), чи потрібно здійснити адаптацію/оновлення даних компенсатора. Різні установки можуть бути здійснені для адаптації компенсатора 810. Наприклад, спосіб може бути конфігурований для адаптації відводів 811 компенсатора на кожний символьний інтервал пілот-сигналу. Альтернативно, спосіб може бути конфігурований для адаптації відводів 811 компенсатора тільки на кожний N-ий символьний інтервал пілот-сигналу, де N - позитивне ціле число. Значення N може бути статичним або динамічним. Спосіб може бути конфігурований для адаптації відводів 811 компенсатора багато разів на кожний символьний інтервал пілот-сигналу. Фахівцям в даній галузі техніки повинно бути зрозуміло, що необхідно адаптувати відводи 811 компенсатора частіше або рідше. Наприклад, в ситуаціях низької швидкості, не потрібна адаптація та оновлення значень відводів 811 так само часто, як в ситуаціях, коли система використовує високі швидкості. Якщо прийняте рішення (1114), що для відводів 811 компенсатора повинна бути здійснена адаптація/оновлення даних, то оцінка символів пілотсигналу вводиться (1116) в адаптивний алгоритм 822 доти, доки адаптивний алгоритм 822 не буде завершений. Можуть бути використані різні способи для визначення того, коли потрібно переривати роботу адаптивного алгоритму 82. Наприклад, адаптивний алгоритм 822 може працювати доти, доки не буде досягнута збіжність для відводів 811. Альтернативно, адаптивний алгоритм 822 може працювати протягом визначеного періоду часу. Крім того, адаптивний алгоритм 822 може запустити адаптацію при зміні умов в каналі. Фахівцям в даній галузі техніки повинно бути зрозуміло, що інші способи також можуть бути використані для визначення того, коли потрібно припинити роботу адаптивного алгоритму 822. Як тільки адаптивний алгоритм 822 виконаний, значення 811 відводів оновлюються (1118). Потім один або більше інших каналів оновлюються або декодуються (1112). Якщо канал 702 пілот-сигналу передається по висхідній лінії 304 зв'язку, то показані компоненти можуть використовуватися в базовій станції 202 для оцінювання каналу пілот-сигналу. Зрозуміло, що принципи, що відповідають винаходу, можуть бути використані з різними компонентами для оцінювання пілот-сигналу, незалежно від того, чи приймається канал пілот-сигналу мобільною станцією 204, базовою станцією 202 або будь-яким іншим компонентом в системі 100 безпровідного зв'язку. Таким чином, представлений варіант здійснення мобільної станції 204 є ілюстративним прикладом систем та способів, і зрозуміло, що ці сис 88605 24 теми та способи можуть використовуватися в різних інших контекстах. На Фіг.12 показана блок-схема способу 1200 обробки безпровідного сигналу з використанням компонента 807 оцінювання каналу та об'єднання. Спосіб 1200 починається з прийому (1202) вихідного сигналу 808 узгодженого фільтра 806. Як описано вище, вихідний сигнал 808 узгодженого фільтра 806 включає в себе множину багатопроменевих сигналів. Багатопроменеві сигнали являють собою різні копії одного і того самого безпровідного сигналу, які генеруються відбиттями від структур та природних формацій. Сигнали багатопроменевого поширення мають часовий зсув один відносно одного. Кожний відвід 1004 компонента 807 оцінювання каналу та об'єднання призначається (1204) і поєднується за часом з одним сигналом багатопроменевого поширення у вихідному сигналі 808. Відводи 1004 виконують ПШ дескремблювання 1206 і стиснення пілот-сигналу для одержання оцінок пілот-сигналу з кожного призначеного відводу. Як описано вище, у варіанті здійснення за Фіг.10 кожний компонент 1006 оцінювання каналу виконує оцінювання каналу для одного відводу 1004. Вихідні сигнали різних відводів 1004 об'єднуються (1210) в один сигнал на основі оцінювання (1006) каналу і часового положення. Об'єднаний сигнал подається (1212) на компенсатор 810. Фахівцям в даній галузі техніки повинно бути зрозуміло, що інформація та сигнали можуть бути представлені з використанням будь-якого з різних технологій та методів. Наприклад, дані, інструкції, команди, інформація, сигнали, біти, символи і кодові елементи, на які можуть даватися посилання у вищевикладеному описі, можуть бути представлені напругами, струмами, електромагнітними хвилями, магнітними полями або частинками, оптичними полями або частинками, або будь-якою комбінацією вказаного. Фахівцям в даній галузі техніки повинно бути зрозуміло, що різні ілюстративні логічні блоки, модулі, схеми та етапи алгоритмів, описані в зв'язку з розкритими варіантами здійснення, можуть бути реалізовані як електронні апаратні засоби, комп'ютерне програмне забезпечення, або як комбінація і того, і іншого. Для того, щоб доступно проілюструвати таку взаємозамінюваність апаратних засобів та програмного забезпечення, різні ілюстративні компоненти, блоки, модулі, схеми та етапи описані вище в термінах їх функціональних можливостей. Те, чи реалізовані такі функціональні можливості як апаратні засоби або програмне забезпечення, залежить від конкретного застосування та обмежень при проектуванні, що накладаються на систему загалом. Фахівець може реалізувати описані функціональні можливості різними шляхами для конкретного застосування, але такі рішення в процесі реалізації не повинні інтерпретуватися як такі, що обумовлюють відхилення від обсягу даного винаходу. Різні ілюстративні логічні блоки, модулі, схеми, описані в зв'язку з розкритими варіантами здійснення, можуть бути реалізовані або виконані за 25 допомогою універсального процесора, цифрового процесора сигналів, орієнтованої на прикладення спеціалізованої інтегральної схеми, програмованої користувачем логічної матриці або інших програмованих логічних пристроїв, дискретних логічних схем або транзисторної логіки, дискретних компонентів апаратних засобів або будь-якою комбінацією вказаного, призначеною для виконання описаних функцій. Універсальний процесор може являти собою мікропроцесор, але альтернативно, процесор може бути будь-яким звичайним процесором, контролером, мікроконтролером або кінцевим автоматом. Процесор також може бути реалізований як комбінація обчислювальних пристроїв, наприклад, як комбінація цифрового процесора сигналів та мікропроцесора, множина мікропроцесорів, один або декілька мікропроцесорів у взаємозв'язку з ядром на цифровому процесорі сигналів, або будь-яка інша така конфігурація. Етапи способу або алгоритму, описані в зв'язку з представленими варіантами здійснення, можуть бути реалізовані безпосередньо апаратними засобами, модулем програмного забезпечення, виконувальним мікропроцесором, або комбінацією того та іншого. Модуль програмного забезпечення може знаходитися в ОЗП, флеш-пам'яті, ПЗП, стираному програмованому ПЗП (ППЗП), електронностираному ППЗП, в регістрах, на жорсткому диску, знімному диску, CD-ROM, або будь-якому іншому носії для зберігання інформації, відомому в техніці. Наприклад, носій для зберігання інформації може бути зв'язаний з процесором так, що процесор може зчитувати інформацію з носія для зберігання інформації та записувати інформацію на носій для зберігання інформації. Як альтернатива, носій для зберігання інформації може бути вбудований в процесор. Процесор та носій для зберігання інформації можуть знаходитися в складі орієнтованої на прикладення спеціалізованої інтегральної схеми, яка може знаходитися в терміналі користувача. Альтернативно, процесор та носій для зберігання інформації можуть знаходитися в терміналі користувача як дискретні компоненти. Розкриті способи містять один або більше етапів або дій для досягнення описаного способу. Етапи способу і/або дії можуть бути взаємозамінними без відхилення від обсягу даного винаходу. Іншими словами, якщо тільки не потрібний конкретний порядок етапів або дій для належного функціонування конкретного варіанта здійснення, то порядок і/або використання конкретних етапів і/або дій можуть модифікуватися без відхилення від обсягу даного винаходу. Наведений вище опис розкритих варіантів здійснення забезпечений для того, щоб будь-який фахівець в даній галузі техніки міг реалізувати або використати даний винахід. Різні модифікації цих варіантів здійснення повинні бути очевидні для фахівців в даній галузі техніки, і загальні принципи, визначені в даному описі, можуть бути застосовані до інших варіантів здійснення без відхилення від суті та обсягу даного винаходу. Таким чином, даний винахід не обмежений наведеними варіантами здійснення, а повинен відповідати найширшому 88605 26 обсягу, сумісному з розкритими принципами та новими ознаками. Перелік посилальних позицій Фіг.2, 3 202 Базова станція 204 Мобільна станція 302 Низхідна лінія зв'язку 304 Висхідна лінія зв'язку Фіг.4, 5 302 Низхідна лінія зв'язку 304 Висхідна лінія зв'язку 402, 502 Канал пілот-сигналу 404 Канал синхронізації 406 Канал пошукового виклику 408, 506 Канал трафіка 504 Канал доступу Фіг.6 600 Абонентський блок 602 Процесор 604 Пам'ять 608 Передавач 610 Приймач 616 Детектор сигналів 626 Блок зміни стану 628 Системний блок визначення 607 Цифровий процесор сигналів Фіг.7 702 Канал пілот-сигналу 708а, 708b Ортогональне розширення 710 Посилення каналу 704 Інші ортогональні канали 706 Неортогональні канали 711 МЧУ 714 ПШ-скремблювання 716 Фільтр базової смуги 718 Передавач 722 Радіоканал Фіг.8 823 Параметри алгоритму 822 Адаптивний алгоритм 820 Додаткова обробка 816 Стиснення 824 Оцінка пілот-сигналу 814 ПШ-скремблювання 811 Відводи 810 Компенсатор 807 Оцінювання каналу та об'єднання 806 Узгоджений фільтр 802 Приймач 722 Радіоканал Фіг.10 1008 Блок об'єднання 1005 Блок оцінювання каналу 1006а, 1006b, 1006c, 1006b Оцінювання коефіцієнта каналу 1002 Вхідний високочастотний каскад багатовідвідного приймача 1004а, 1004b, 1004c, 1004n Відвід (дескремблювання і стиснення пілот-сигналу) Фіг.11 1102 Прийом сигналу, який включає в себе канал пілот-сигналу та інші канали 1104 Фільтрація з використанням узгодженого фільтра 27 1105 Обробка вихідного сигналу узгодженого фільтра в блоці оцінювання каналу та виконання об'єднання на основі оцінки каналу 1106 Компенсація сигналу з узгодженого фільтра 1108 Виконання ПШ-скремблювання 1110 Виконання стиснення та одержання каналу пілот-сигналу та інших каналів 1114 Адаптація 1116 Введення оцінки символів пілот-сигналу в адаптивний алгоритм та адаптація відводів до завершення виконання 1118 Оновлення значень відводів 1112 Відновлення/декодування інших каналів 88605 28 Фіг.12 1202 Прийом вихідного сигналу узгодженого фільтра 1204 Призначення кожного відводу сигналу багатопроменевого поширення в складі вихідного сигналу 1206 Виконання ПШ-дескремблювання і стиснення для одержання символів пілот-сигналу з кожного призначеного сигналу багатопроменевого поширення 1208 Виконання оцінювання каналу 1210 Об'єднання вихідних сигналів відводів в один сигнал на основі оцінювання канал 1212 Подача об'єднаного сигналу в компенсатор 29 88605 30 31 Комп’ютерна верстка Т. Чепелева 88605 Підписне 32 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюReceiver for a communication system with an equalizer based on multichannel reception
Автори англійськоюMalladi Durga Prasad, Blanz Joseph, Wey Yunbing
Назва патенту російськоюПриемник системы связи с адаптивным компенсатором на основе многоканального приема
Автори російськоюМаллади Дурга Прасад, Бланц Джозеф, Вей Юнбинь
МПК / Мітки
МПК: H04B 1/707, H04L 25/03
Мітки: основі, зв'язку, прийому, адаптивним, багатоканального, приймач, компенсатором, системі
Код посилання
<a href="https://ua.patents.su/16-88605-prijjmach-sistemi-zvyazku-z-adaptivnim-kompensatorom-na-osnovi-bagatokanalnogo-prijjomu.html" target="_blank" rel="follow" title="База патентів України">Приймач системи зв’язку з адаптивним компенсатором на основі багатоканального прийому</a>
Спосіб одночасної передачі сукупності типів даних та спосіб прийому передачі, мультиплексованої з розділенням часу у системі безпровідного звязку, а також передавальний та приймальний вузли такої системи
Номер патенту: 74396
Опубліковано: 15.12.2005
Автори: Ландбі Стайн А., Вілленеґґер Серж
МПК: H04B 7/26, H04J 4/00, H04J 13/00, H04L 27/00
Мітки: даних, приймальний, такої, сукупності, часу, прийому, вузлі, розділенням, зв'язку, передачі, мультиплексованої, також, спосіб, безпровідного, передавальний, типів, одночасної, системі
Формула / Реферат:
1. Спосіб одночасної передачі сукупності типів даних у системі безпровідного зв'язку, який включає:- прийом і обробку першого типу даних згідно з першою схемою обробки сигналу для генерування першого корисного навантаження,- прийом і обробку другого типу даних згідно з другою схемою обробки сигналу для генерування другого корисного навантаження,- визначення у інтервалі передачі першої частини, призначеної для передачі...
Спосіб та приймач для моніторингу якості інформації у безпровідному каналі звязку, спосіб визначення полярності бітів керування потужністю, а також спосіб моніторингу якості субканалу керування потужністю та пр
Номер патенту: 74167
Опубліковано: 15.11.2005
Автори: Лінг Фун'юн, Тіедеманн Едвард Дж., молодший, Чен Тао
МПК: H04L 25/00, H04B 1/00, H04L 1/00, H04B 7/005, H04Q 7/00, H04B 7/00
Мітки: інформації, полярності, бітів, також, якості, каналі, зв'язку, спосіб, моніторингу, керування, визначення, приймач, безпровідному, субканалу, потужністю
Формула / Реферат:
1. Спосіб моніторингу якості інформації, прийнятої у безпровідному каналі зв'язку, який включає операції:прийому інформації, яка містить як відому, так і невідому інформацію,створення заміщаючої частоти появи хибних бітів на основі відомої інформації ізастосування заміщаючої частоти появи хибних бітів до невідомої.2. Спосіб за п. 1, який відрізняється тим, що у переданий сигнал безпровідного каналу зв'язку не...
Канальна структура системи зв’язку і передавач та приймач для такої системи
Номер патенту: 55477
Опубліковано: 15.04.2003
Автори: Тідеманн Едвард Г., мол., Джоу Ю-Чен, Резайіфар Рамін
МПК: H04Q 7/38
Мітки: приймач, зв'язку, канальна, передавач, такої, системі, структура
Формула / Реферат:
1. Канальна структура для систем зв'язку, яка включає:- щонайменше один головний канал для передачі інформаційних даних, голосових даних і службових повідомлень,- допоміжний канал для передачі інформаційних даних і- пейджерний канал для передачі пейджерних повідомлень.2. Канальна структура за п. 1, яка відрізняється тим, що для головного каналу передбачено можливість м'якої передачі зв'язку.3. Канальна...
Спосіб і пристрій визначення робочої сітки частот системи звязку із стрибкоподібною зміною частоти
Номер патенту: 63931
Опубліковано: 16.02.2004
Автор: Сорочан Анатолій Григорович
МПК: G01R 23/00
Мітки: визначення, спосіб, зв'язку, сітки, частоти, системі, зміною, робочої, пристрій, частот, стрибкоподібною
Формула / Реферат:
1.Спосіб визначення робочої сітки частот системи зв’язку із стрибкоподібною зміною частоти, який ґрунтується на тому, що вхідний сигнал із стрибкоподібно змінюваною робочою частотою Wс, яка знаходиться в діапазоні частот DW, розгалужують на три частини, в першій частині сигнал зміщують по частоті на частоту гетеродину Wг1 і затримують на сталу часу t01, одержаний сигнал перемножують з другою частиною сигналу, після чого на частоті Wг1...
Спосіб створення допоміжного пілот-сигналу, спосіб його прийому і пристрій для його здійснення та спосіб індивідуальної передачі
Номер патенту: 63963
Опубліковано: 16.02.2004
Автори: Ландбі Стайн А., Тідеманн Едвард Г., мол., Оденвалдер Джозеф П.
МПК: H04B 1/707, H04B 7/26, H04J 11/00
Мітки: пілот-сигналу, спосіб, здійснення, допоміжного, створення, прийому, передачі, пристрій, індивідуальної
Формула / Реферат:
1. Спосіб створення допоміжного пілот-сигналу, який передбачає операції: прийому пілотних даних і покриття зазначених пілотних даних пілотною послідовністю Уолша, яку утворюють конкатенацією основної послідовності Уолша і її комплементарної послідовності.2. Спосіб за п. 1, який відрізняється тим, що зазначена основна послідовність Уолша є послідовністю нулів.3. Спосіб за п. 1, який відрізняється тим, що зазначена основна...
Попередній патент: Застосування антитіла, що зв’язується з альфа-4-інтегрином, для лікування демієлінізуючого захворювання
Наступний патент: Ножова головка кутера, диск ножової головки, система з диска і ножів (варіанти) і спосіб складання ножової головки (варіанти)
Випадковий патент: Штамповане з'єднувальне кільце круглокільцевих ланцюгів пересувних скребкових конвеєрів