Спосіб та приймач для моніторингу якості інформації у безпровідному каналі звязку, спосіб визначення полярності бітів керування потужністю, а також спосіб моніторингу якості субканалу керування потужністю та пр
Номер патенту: 74167
Опубліковано: 15.11.2005
Автори: Тіедеманн Едвард Дж., молодший, Чен Тао, Лінг Фун'юн
Формула / Реферат
1. Спосіб моніторингу якості інформації, прийнятої у безпровідному каналі зв'язку, який включає операції:
прийому інформації, яка містить як відому, так і невідому інформацію,
створення заміщаючої частоти появи хибних бітів на основі відомої інформації і
застосування заміщаючої частоти появи хибних бітів до невідомої.
2. Спосіб за п. 1, який відрізняється тим, що у переданий сигнал безпровідного каналу зв'язку не введено ніякої інформації, призначеної для моніторингу якості.
3. Спосіб за п. 1, який відрізняється тим, що додатково включає операцію створення штучних бітів з відомої канальної інформації для генерування зазначеної заміщаючої частоти появи хибних бітів.
4. Спосіб за п. 3, який відрізняється тим, що зазначена операція генерування штучних бітів включає операції:
складання переданих елементів коду відомої інформації, при якому зазначені штучні біти проектуються на відомий еталонний вектор для створення зазначеної заміщаючої частоти появи хибних бітів.
5. Спосіб за п. 1, який відрізняється тим, що зазначена операція створення зазначеної заміщаючої частоти появи хибних бітів включає операцію калібрування зазначеної частоти появи хибних бітів згідно з характеристиками каналу.
6. Спосіб за п. 1, який відрізняється тим, що зазначена частота появи хибних бітів використовується для моніторингу якості інформації.
7. Спосіб за п. 1, який відрізняється тим, що зазначена частота появи хибних бітів використовується для тестування фізичного рівня.
8. Спосіб за п. 1, який відрізняється тим, що зазначена частота появи хибних бітів використовується для підтримання якості передачі.
9. Спосіб за п. 1, який відрізняється тим, що зазначена частота появи хибних бітів використовується для утримання якості передачі на зумовленому рівні.
10. Спосіб за п. 1, який відрізняється тим, що зазначена частота появи хибних бітів використовується для забезпечення індивідуальних рівнів якості передачі у каналах.
11. Приймач для моніторингу якості інформації у безпровідному каналі зв'язку, який включає:
перемножувач для відокремлення індивідуального каналу з комбінованого сигналу множенням цього комбінованого сигналу на код Уолша цього індивідуального каналу для одержання відокремленого каналу,
суматор для когерентного об'єднання елементів коду відокремленого каналу протягом періоду часу, необхідного для формування потоку елементів коду відокремленого каналу,
суматор вектора штучних бітів для відокремлення вектора штучних бітів керування потужністю з потоку елементів коду відокремленого каналу.
12. Спосіб визначення полярності бітів керування потужністю, який включає:
когерентне складання елементів коду пілот-каналу прийнятого сигналу для одержання вектора пілотного еталона,
когерентне складання елементів коду групи керування потужністю для створення вектора бітів керування потужністю,
проектування вектора бітів керування потужністю на вектор пілотного еталона обчисленням скалярного добутку вектора бітів керування потужністю і вектора пілотного еталона для одержання знакового значення, яке вказує полярність вектора бітів керування потужністю, і
визначення полярності вектора бітів керування потужністю через аналіз цього знакового значення.
13. Спосіб моніторингу якості субканалу керування потужністю, який включає:
когерентне складання елементів коду пілот-каналу прийнятого сигналу для одержання вектора пілотного еталона,
виділення сегмента вектора пілотного еталона для одержання штучних бітів керування потужністю,
проектування вектора бітів керування потужністю на вектор пілотного еталона обчисленням скалярного добутку вектора бітів керування потужністю і вектора пілотного еталона для одержання знакового значення, яке вказує полярність штучних бітів керування потужністю,
визначення полярності штучних бітів керування потужністю через аналіз цього знакового значення,
обчислення з сукупності бітів керування потужністю частоти появи хибних бітів керування потужністю і
обчислення заміщаючої частоти появи хибних бітів субканалу керування потужністю з частоти появи хибних бітів керування потужністю.
14. Спосіб за п. 13, який відрізняється тим, що додатково включає калібрування заміщаючоїчастоти появи хибних бітів керування потужністю.
15. Пристрій контролю частоти появи помилок у субканалі керування потужністю з підтриманням іншої частоти появи помилок у інформаційному каналі, який включає:
демодулятор інформаційного каналу для демодуляції даних, згорнутих згідно з заздалегідь визначеною послідовністю Уолша, для одержання демодульованих символів,
вузол перевірки циклічної надмірності для обчислення кількості помилок циклічної надмірності і
процесор керування для обчислення частоти появи хибних бітів субканалу керування потужністю через вектор бітів керування потужністю, вектор пілотного еталона, штучний біт і кількість помилок циклічної надмірності.
Текст
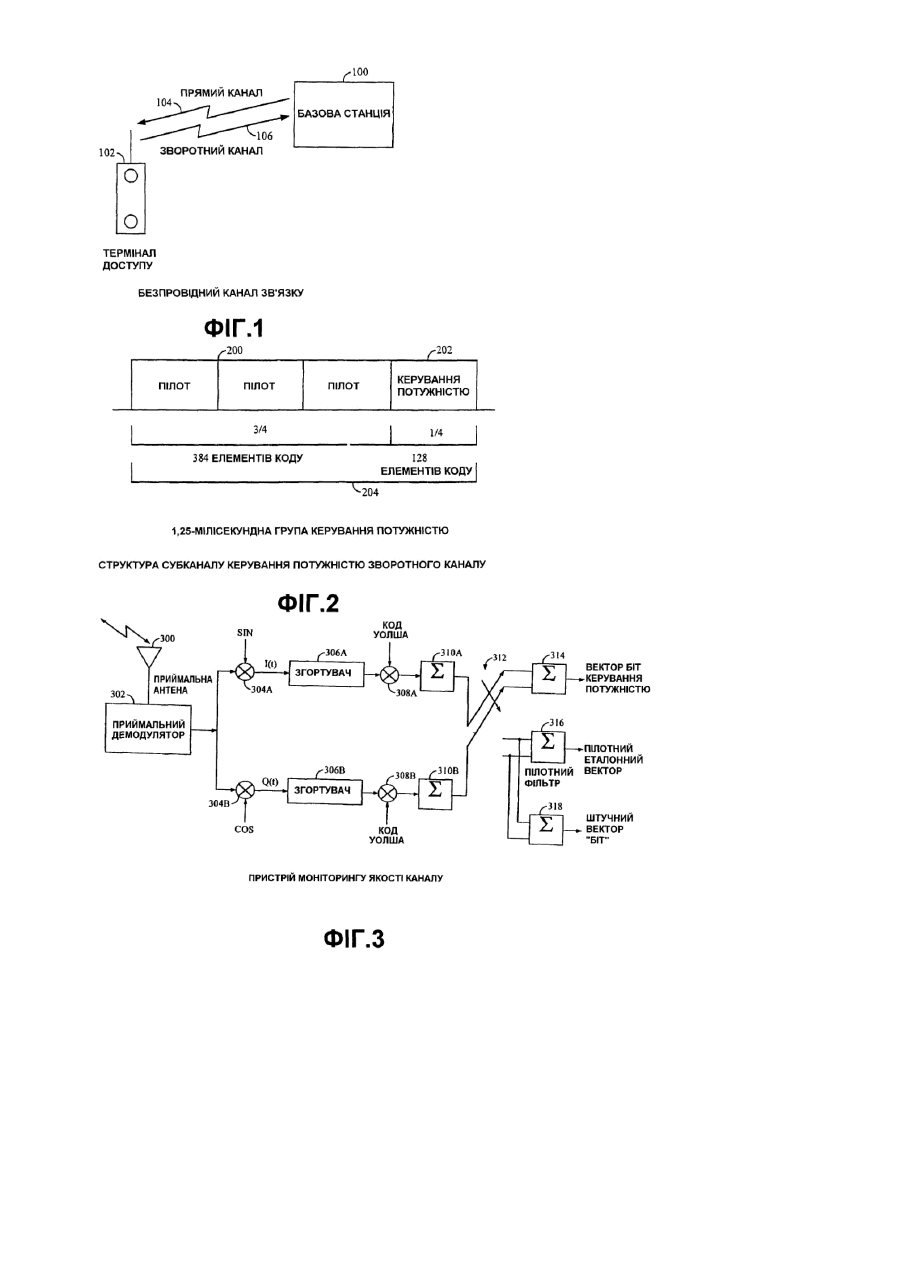
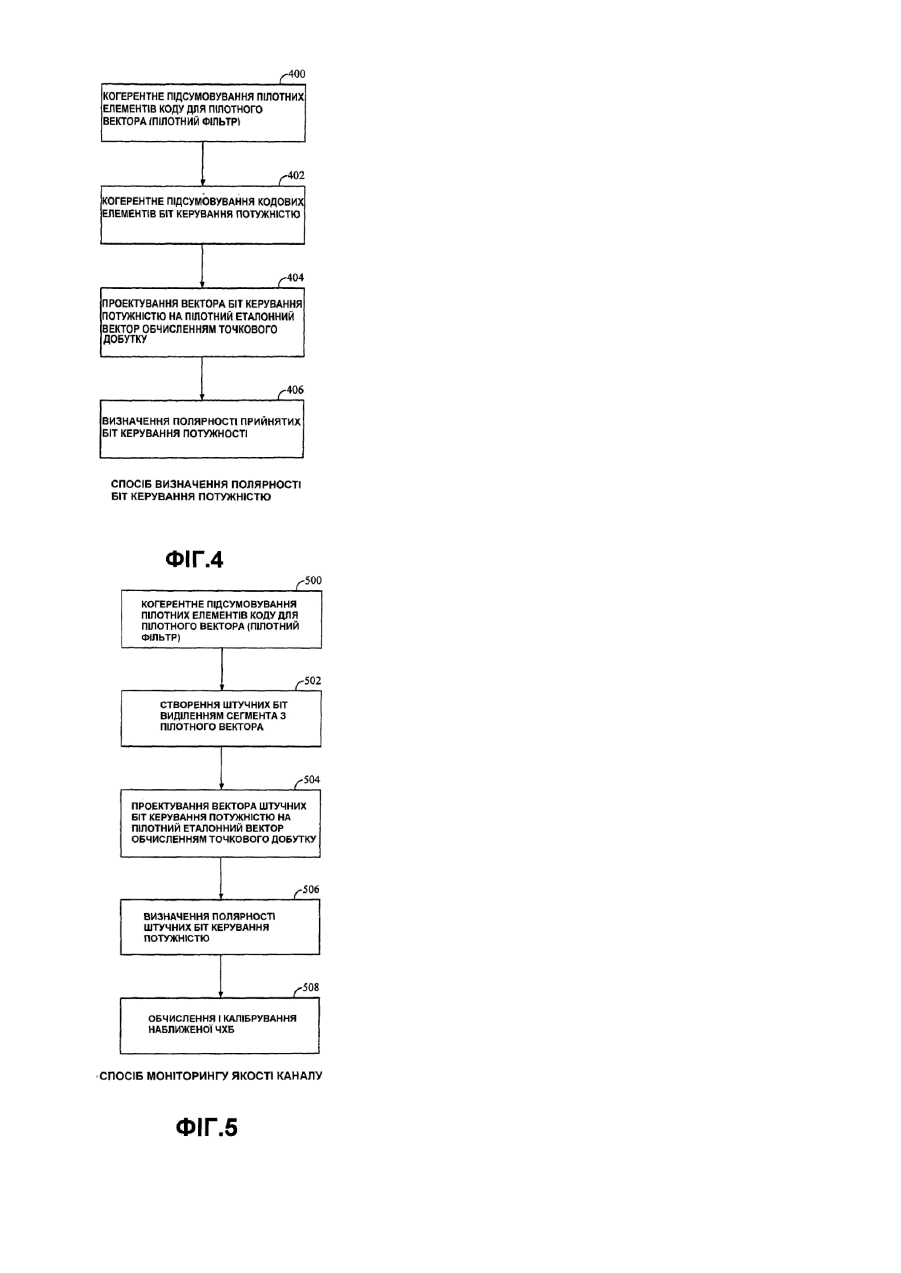
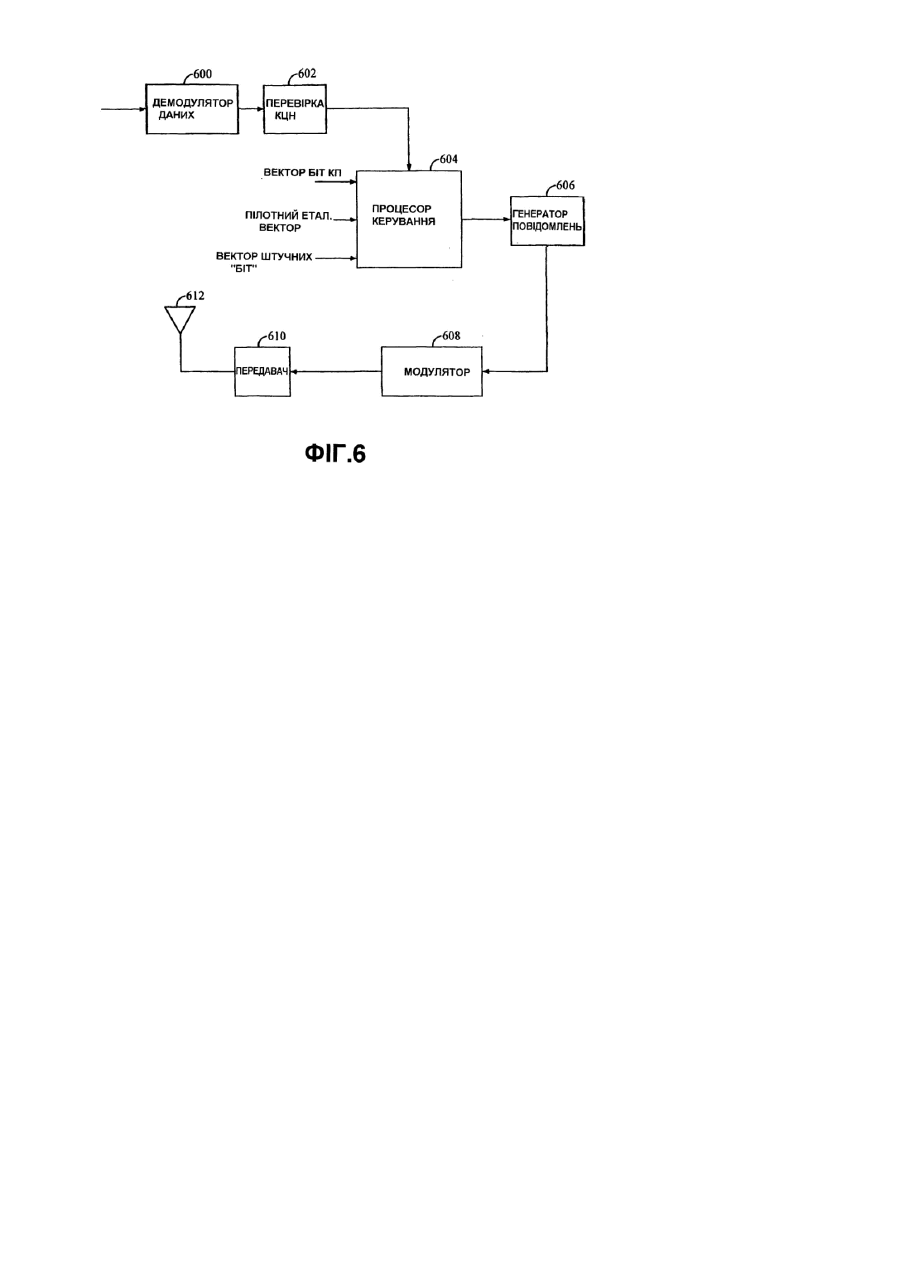
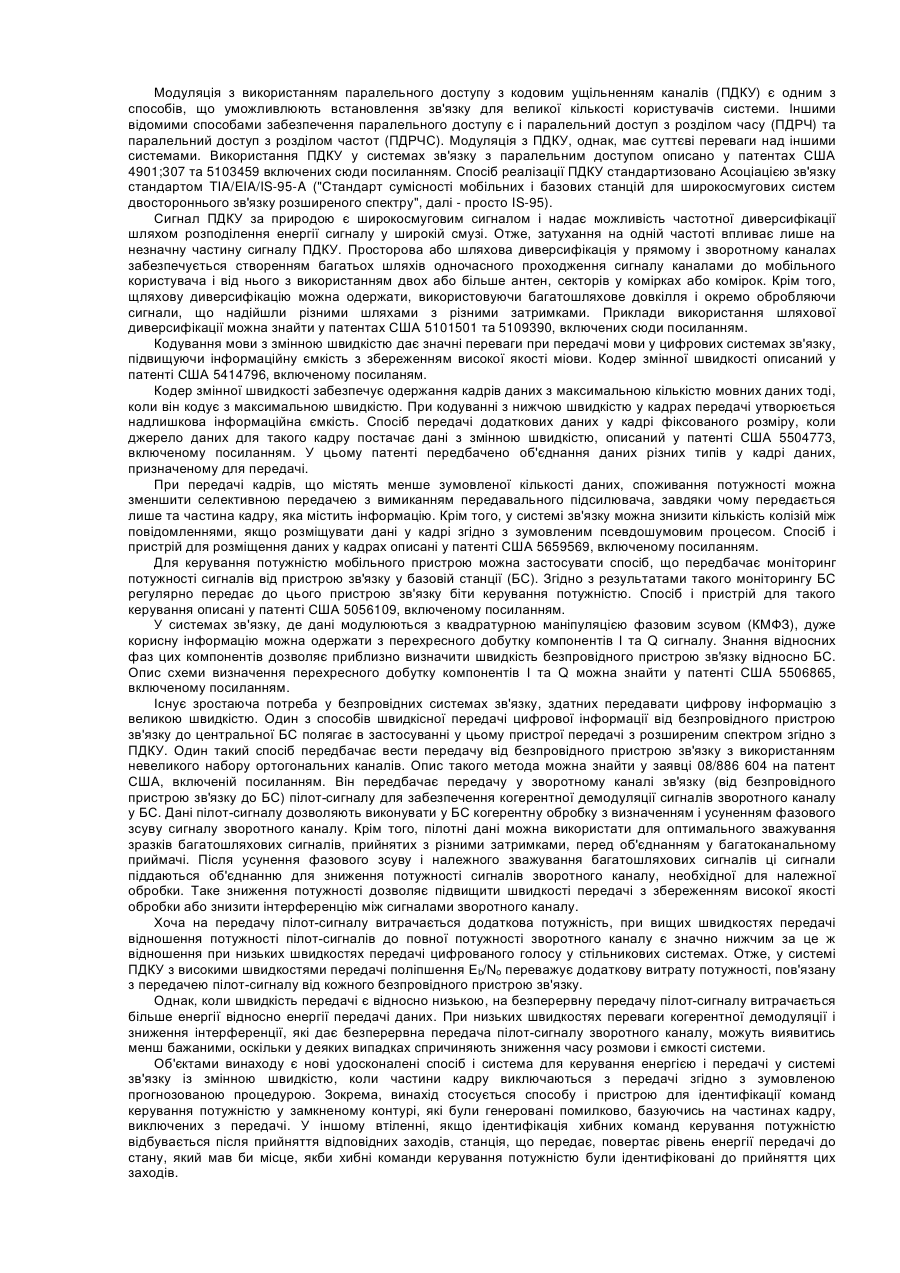
Винахід стосується мереж безпровідного зв'язку, зокрема, нового удосконаленого способу моніторингу якості передачі безпровідних каналів зв'язку. Для роботи системи безпровідного зв'язку необхідно вести моніторинг якості передачі каналів зв'язку. Система не може працювати без забезпечення точної зворотної інформації про якість передачі у реальному часі. Якість передачі оцінюють через частоту появи хибних біт (ЧХБ), тобто процент хибних біт у повній кількості прийнятих біт, що були передані. Наприклад, ЧХБ 4% означає, що з 100 переданих біт 4 біти при прийомі виявились хибними. Наразі не існує ідеального способу вести моніторинг якості передачі у системах безпровідного зв'язку. Відомі способи моніторингу передбачають додання інформації до сигналу, що передається, виключно з метою моніторингу. Один з таких способів передбачає внесення певного набору біт у сигнал, що передається, і порівняння прийнятий набір біт з фактично переданим для обчислення ЧХБ. Інший спосіб передбачає додання коду циклічної надмірності (КЦН) до переданого сигналу. Перевірка циклічної надмірності є способом виявлення помилок у даних, переданих у каналі зв'язку. Передавальний пристрій застосовує 16- або 32-бітовий поліном до блоку даних, що підлягають передачі, і додає одержаний КЦН до цього блоку. На приймальному кінці до даних застосовується такий же поліном і результат порівнюється з переданим. Якщо КЦН збігаються, це означає, що дані були прийняті без помилок. Будь-який спосіб моніторингу якості передачі, який додає послідовність біт або біти КЦН до сигналу, що передається, знижує інформаційний потік у каналі. Крім того КЦН лише вказує на наявність помилок у блоці, але не дає значення ЧХБ. Об'єктом винаходу є новий удосконалений спосіб моніторингу якості безпровідного каналу зв'язку без використання для цього частини пропускної здатності каналу, енергії і часу, які раніше використовувались для додання моніторингової інформації. Спосіб винаходу поліпшує пропускну здатність каналу і дає більш точну оцінку фактичної ЧХБ завдяки повторному використанню інформації, яку вже несе цей канал для інших потреб. Використовуючи відому інформацію, наприклад, пілотні символи, для обчаслення ЧХБ, винахід може забезпечити моніторинг якості передачі без витрати для цього частотної смуги каналу. Для виконання моніторингу невідомої якості каналів без фактичного вимірювання помилок винахід передбачає формування наближеної ЧХБ з відомої інформації про канал. Винахід передбачає генерування наближеної ЧХБ шляхом обробки відомої інформації про канал подібно до обробки каналу, що знаходиться під моніторингом. Особливості, об'єкти і переваги винаходу детально розглядаються у наведеному подальшому описі з посиланнями на креслення, у яких: Фіг.1 - схема безпровідного каналу зв'язку високого рівня, Фіг.2 - схема структури субканалу керування потужністю зворотного каналу зв'язку, Фіг.3 - схема пристрою, що використовується для моніторингу якості каналу згідно з винаходом, Фіг.4 - блок-схема алгоритма визначення полярності біт керування потужністю згідно з винаходом. Фіг.5 - блок-схема алгоритма способу моніторинга якості каналу згідно з винаходом, Фіг.6 - блок-схема пристрою, використаного у винаході для контролю частоти помилок субканалу керування потужністю з одночасним підтриманням частоти помилок інформаційного каналу на іншому рівні. Фіг.1 містить схему безпровідного каналу зв'язку між базовою станцією (БС) 100 і терміналом 102 доступ у. Термінали 102 доступу (ТД) відомі також як мобільні станції безпровідної системи зв'язку. БС 100 і ТД 102 підтримують між собою зв'язок через 2 канали зв'язку, відомі як прямий канал 104 і зворотний канал 106. Інформація від БС 100 до ТД 102 проходить через прямий канал 104, а від ТД 102 до БС 100 - через зворотний канал 106. БС 100 є приймачем зворотного каналу 106. У системі IS2000 зворотний канал зв'язку 106 має 4 канали: основний зворотний канал, спеціальний зворотний канал керування, зворотний пілот-канал і допоміжний зворотний канал. У зворотний пілот-канал перед каналізацією Уолша і ПШ розширенням вкраплюють зворотний субканал керування потужністю. Вкраплені біти мають значення +1 або -1. Субканал біт керування потужністю надає ТД 102 механізм надсилання до БС 100 команд на підвищення або зниження потужності передачі у прямому каналі 104 для досягнення зумовленої частоти стирання кадрів (ЧСК) при прийомі у ТД 102. БС 100 інформує ТД 102 про бажане значення ЧСК для прямого каналу 104 і підтримує цей рівень за допомогою команд керування потужністю, або зворотного зв'язку, які вона приймає у зворотному каналі 106. Досягнення бажаної ЧСК у прямому каналі 104 дає змогу системі зв'язку витрачати мінімум потужності БС і створювати завдяки цьому мінімум перешкод у мережі при прийнятній якості зв'язку. Зниження потужності БС і перешкод для інших ТД підвищують інформаційну здатність системи. БС 100 виконує команди керування потужністю від ТД 102 на підвищення (+1) або зниження (-1) потужності у прямому каналі 104, які визначаються тим, чи є ЧХБ при прийомі у ТД 102 нижчою або вищою за бажане значення, встановлене БС 100. У іншому втіленні біти команд керування потужністю можуть бути багатобітовими командами, які визначають значення корекції потужності. Зворотний субканал керування потужністю не несе виявлення помилок. Він несе лише інформацію про якість передачі у прямому каналі 104 у вигляді команд керування потужністю або зворотного зв'язку. Цей канал не несе користувацьких інформаційних біт. Його призначенням є керування потужністю прямого каналу 104. Якість зворотного субканалу керування потужністю залишається невідомою, якщо не застосовувати певного моніторингу· Винахід передбачає моніторинг якості цього субканалу без введення моніторингової інформації і передбачає використання наближеного або екстраполяційного способу, що ілюструється подальшими кресленнями. Природа створення наближеної ЧХБ для невідомої інформації каналу з відомої інформації дає змогу фа хівцю зрозуміти, що спосіб моніторингу якості у зворотному каналі згідно з бажаним втіленням може бути застосований для будь-якого безпровідного каналу зв'язку. Безпровідні канали зв'язку визначені "Стандартом фізичного рівня для систем розширеного спектра cdma2000", включеним у цей документ посиланням. Винахід пропонує механізм тестування фізичного рівня, визначеного згаданим вище стандартом. Зрозуміло, що винахід може знайти застосування і у інших безпровідних системах зв'язку і його застосування не обмежується системами паралельного доступу з кодовим ущільненням каналів (ПДКУ) стандарту IS2000. Фіг.2 містить структур у субканалу керування потужністю зворотного каналу зв'язку. Кожні 1,25мс у зворотному пілот-каналі передається група 204 керування потужністю (ГКП). У кожній ГКП 204 3/4 сигналу припадає на зворотний пілот-канал 200 і 1/4 - на зворотний субканал 202 керування потужністю. Пілотканал 200 є постійним сигналом +1 і не несе інформації. Зворотний субканал 202 керування потужністю є повторенням біт команд керування потужністю прямого каналу, тобто біт +1 і -1, генерованих у ТД 102. У системах ПДКУ час часто виміряють у елементах коду. Частота елементів коду у ПДКУ IS2000 становить 1,2288´106 елементів за сек. (частота 1), тобто тривалість одного елемента коду становить 813,8нс. ГКП 204 містить 384 елементи 200 коду пілот-сигналу і 128 елементів 202 коду керування потужністю. У типовому втіленні всі елементи коду, що надсилаються у зворотному пілот-каналі, передаються номінально з однаковим рівнем потужності, тобто елементи 200 коду пілот-сигналу і елементи 202 коду керування потужністю мають однакову амплітуду і співвідношення їх тривалостей становить 3:1. Винахід включає і інші співвідношення між пілотними символами і символами керування потужністю. Згідно з винаходом, моніторинг відомого сигналу пілот-каналу дає змогу генерувати наближену ЧХБ, подібну до фактичної ЧХБ невідомої інформації у зворотному субканалі керування потужністю. Винахід дає спосіб моніторингу ЧХБ каналів з деякими відомими характеристиками, наприклад, пілотних символів або пілот-каналів без внесення біт КЦН або інших послідовностей біт у основний потік біт. Побічна інформація, одержана з відомих характеристик, наприклад, пілот-каналу, дає змогу непрямим шляхом визначити ЧХБ для невідомої інформації, наприклад, зворотного керування потужністю. Іншим прикладом відомої інформації у каналах зв'язку ПДКУ є пілотні символи. Вони обробляються подібно до пілот-каналів. Фіг.3 містить схему типового втілення пристрою згідно з винаходом для моніторингу якості каналу і тестування фізичного рівня системи безпровідного зв'язку. Пристрій відокремлює пілот-канал і канали керування потужністю з комбінованого прийнятого сигналу. Елементи коду відокремлюються таким чином, що їх можна когерентно складати для генерування штучни х бітових помилок пілот-каналу і використання як наближених для ЧХБ біт керування потужністю. На Фіг.3 показано шлях прийнятого сигналу лише через обладнання, що використовується згідно з винаходом для моніторингу якості сигналу. Антена є перетворювачем, що конвертує радіочастотні (РЧ) поля у змінний струм або навпаки. Приймальна антена приймає РЧ енергію і надсилає змінний струм до електронного обладнання. Прийнятий аналоговий сигнал досягає антенного елемента 300 і його частота знижується до частоти модуляції приймальним демодуляційним елементом 302. Після цього перетворення зворотний субканал керування потужністю може бути відокремлений від інших каналів у сигналі. Прийнятий сигнал розділяється на фазний (І) і квадратурний (Q) компоненти помножувачем, відповідно, 304а і 304b з утворенням потоку комплексних чисел. Елемент 306 згортання помноженням відокремлює ПШ послідовності або елементи коду. ПШ послідовності складаються з псевдовипадкових чисел і використовуються у безпровідному зв'язку для відокремлення користувацьких сигналів у приймачах БС. Згортувачі 306 генерують зразки І, Q з первісного сигналу з усіма його каналами. Зворотний пілот-канал і зворотний субканал керування потужністю відокремлюються від первісного сигналу помножувачами 308 і суматорами 310. Помножувачі 308 відокремлюють індивідуальні канали від комбінованого сигналу множенням його на канальний код Уолша, інакше кажучи, видаляють покриття Уолша. Код Уолша є ортогональною послідовністю, що використовується у безпровідному зв'язку для розділення каналів. Суматорні елементи 310 когерентно об'єднують, або складають комплексні числа, елементи коду або зразки таких елементів відокремлених каналів у часі. Відокремлений потік елементів коду каналу перемикається елементом 312 до векторного суматорного елемента 314біт керування потужністю протягом 1/4 тривалості (1,25мс) ГКП, яка відповідає наявності у ГКП сигналу зворотного субканалу керування потужністю. Вихід векторного суматорного елемента 314біт керування потужністю є вектором біт керування потужністю. Елементом 312 відокремлений потік елементів коду каналу перемикається до сума-торного елемента 316 пілотного фільтра і векторного суматорного елемента 318 штучних біт протягом 3/4 тривалості (1,25мс) ГКП, яка відповідає наявності у ГКП сигналу зворотного пілот-каналу. Вихід векторного суматорного елемента 314 є ковзною сумою елементів пілот-каналу, яка створює еталонний вектор пілотного фільтра. Векторний суматорний елемент 314 штучних бі т є новою ознакою винаходу. Ви ходом елемента 314 є відокремлений сегмент еталонного вектора пілотного фільтра, який репрезентує штучний вектор біт керування потужністю. Згідно з винаходом, для визначення полярності біт керування потужністю вектор біт керування потужністю проектується на еталонний вектор пілотного фільтра. Подібним чином штучний вектор біт керування потужністю проектується на еталонний вектор пілотного фільтра для одержання наближеного ЧХБ для невідомих біт керування потужністю. Біти (+1/-1) керування потужністю відокремлюються з модульованого сигналу зворотного субканалу керування потужністю когерентним складанням всіх елементів коду ГКП (комплексним складанням векторів або комплексних чисел). Сигнал пілот-каналу відокремлюється з модульованого сигналу зворотного субканалу керування потужністю когерентним складанням всіх елементів коду у межах заданого періоду часу, обраного для оптимізації еталону за різних умов каналу, наприклад, швидкого і повільного завмирання. Згідно з винаходом, вектори, створені когерентним складанням елементів коду пілот-каналу, дозволяють екстраполювати непрямі вимірювання частоти помилок у каналі керування потужністю, яку не можна виміряти безпосередньо. Метод екстраполяції розглядається нижче. Фіг.4 містить блок-схему алгоритма способу визначення полярності біт керування потужністю згідно з винаходом. Передані біти керування потужністю мають значення +1 або -1. Приймач має визначити полярність (+1 або -1) цих біт. Шум у прийнятому сигналі може спричинити перекидання біту або неправильне визначення полярності біту керування. Оскільки біти керування потужністю передаються без даних для виправлення помилок, приймач не може знати їх ЧХБ, тобто він не знає частоти хибного визначення полярності. Визначення полярності біт керування потужністю має ілюструвати застосування наближеної ЧХБ для невідомої інформації згідно з винаходом. Це визначення починається блоком 400 когерентного складання елементів коду пілот-каналу для формування еталонного вектора елементів коду з значенням +1, відомого значення пілот-сигналу. Цей вектор є сумою багатьох елементів коду пілот-каналу. Чим більше цих елементів складаються, тим більшим стає вектор пілот-каналу, досягаючи стаціонарності каналу. Випадкові компоненти шуму у зразках взаємно компенсуються в той час, як пілотний вектор зростає у одному напрямку. Результатом є стабільний еталонний вектор значень +1 з високим відношенням сигнал/шум (S/N), відносно якого у приймачі можна оцінювати полярність біт керування потужністю. У блоці 402 когерентно складаються всі елементи коду керування потужністю ГКП для даного біту керування потужністю з формуванням вектора РСВ. Блоком 404 визначається внутрішній добуток двох векторів. Цей добуток проектує вектор біт керування потужністю на еталонний вектор пілот-каналу і дає знакове значення, що визначає полярність. Блоком 406 визначається полярність біт керування потужністю через перевірку знаку внутрішнього (або точкового) добутку. Якщо знак є позитивним або кут становить менше 90°, прийнятий біт керування потужністю визначається як позитивний (+1) або як вирівняний згідно з відомим еталоном +1. Якщо знак є негативним або кут перевищує 90°, прийнятий біт керування потужністю визначається як негативний (+1) або як вирівняний протилежно до відомого еталону +1. ЧХБ, або частота невдалого виконання процесу внаслідок шуму, не може бути визначена у приймачі без застосування способу моніторингу якості згідно з винаходом. Фіг.5 містить блок-схему алгоритма способу моніторингу якості каналу згідно з винаходом. Згідно з типовим втіленням винаходу у пілот-каналі генеруються штучні бітові помилки і ЧХБ штучних біт використовується як наближення для ЧХБ субканалу керування потужністю. Наближену ЧХБ можна використовува ти завдяки статистичної ідентичності частоти помилок обох каналів. Блоком 500 створюється еталонний вектор пілот-каналу для визначення полярності біт керування потужністю (блок 400 Фіг.4). Згідно з винаходом використовується властивість пілот-каналу завжди мати одну полярність, оскільки він не несе даних і є постійним. З цією причини часовий сегмент вектора може бути відокремлений і може репрезентува ти штучний біт. Зрозуміло, що використання відомої властивості каналу може бути розповсюджене на будь-який пілот-канал або пілотний символ відомої структури. Блоком 502 з вектора пілот-каналу відокремлюються елементи коду для формування сегмента вектора. Елементи коду одержаного сегмента вектора пілот-каналу піддаються когерентному складанню для формування комплексного числа (вектора), що репрезентує штучний біт керування потужністю, відомий також як біт зворотного зв'язку. Цей сегмент використовується як біт керування потужністю. Оскільки біт керування потужністю передається подібно до передачі пілот-сигналу зворотного каналу, сегмент пілотного вектора може бути відділений і розглядатись як тест-сигнал (або штучний біт) для перевірки правильності (+1) або неправильності (-1) полярності. Сигнал у невеликому сегменті вектора ГКП передається у тому ж напрямку, що і решта пілотного вектора. Однак, внаслідок його скінченої тривалості рівень шуму може виявитись достатнім для перекидання його стану. На цьому сегменті береться сума для одержання нового вектора, або штучного біта керування потужністю. Цей штучний біт може репрезентувати біт керування потужністю навіть тоді, коли елементи коду зворотного пілот-каналу не були передані як такі. Наближена ЧХБ для біт керування потужністю може бути одержана через визначення полярності штучних біт, оскільки відомо, що коли полярність штучного біту виявляється негативною, результат є неправильним. Результат -1 розглядається як хибний біт. Можна визначити частоту обчислення цього неправильного результату. Це обчислення є мірою ЧХБ на штучних бітах, статистично еквівалентною фактичній ЧХБ біт керування потужністю. Ці ЧХБ є статистично еквівалентними, оскільки статистика шуму протягом 1/4 часу, коли присутні біти керування потужністю, є такою ж, як протягом 3/4 часу, коли присутнім є пілот-сигнал. Згідно з винаходом, цей спосіб тестування відомого сигналу з таким же відношенням сигнал/шум, як у невідомому сигналі, використовується для екстраполяції ЧХБ для невідомої інформації. Згідно з винаходом, моніторинг штучно створених біт керування потужністю може виконуватись паралельно з демодуляцією біт керування потужністю у зворотному каналі для створення наближеної ЧХБ у реальному часі. Наближена ЧХБ згідно з винаходом використовується у системах безпровідного зв'язку для підтримання якості передачі, забезпечення певного рівня якості передачі, забезпечення індивідуального рівня якості індивідуальних каналів і тестування фізичного рівня системи. Блоком 504 обчислюються внутрішній добуток пілотного вектора і вектора штучни х біт. Цей внутрішній добуток проектує вектор штучних біт керування потужністю на вектор пілот-каналу і дає знаковий результат, що вказує на полярність. Блоком 506 визначається полярність штучних біт керування потужністю через перевірку знаку внутрішнього (або точкового) добутку. Якщо знак є позитивним або кут становить менше 90°, прийнятий біт керування потужністю визначається як позитивний (+1) або як вирівняний згідно з відомим еталоном +1. Результат є правильним за визначенням. Якщо знак є негативним або кут перевищує 90°, прийнятий біт керування потужністю визначається як негативний (+1) або як вирівняний протилежно до відомого еталону +1. Негативна полярність штучного біту є неправильною за визначенням. У блоці 508 наближена ЧХБ субканалу керування потужністю обчислюється з ЧХБ штучних бі т і калібрується згідно з канальними характеристиками пілот-каналу з якого вони були взяті. Винахід передбачає калібрування наближеної ЧХБ для компенсації змін умов каналу коригуванням довжини, або тривалості підсумовування. Якщо канал є стаціонарним, вектор сигналу зберігає напрямок. Когерентне підсумовування завжди дає більш довгий вектор у одному напрямку. Цей канал характеризується середнім гаусівським білим шумом (СГБШ). У каналі СГБШ канальні характеристики не змінюються з часом. Фактичні рівні шуму у різних векторах є незалежними, а відношення сигнал/шум є високим. Складання більшої кількості зразків дає більш стабільний еталонний вектор. Однак, якщо канал є змінним або зазнає завмирання у часі, е талонний пілотний вектор змінюється, подовжуючись і скорочуючись під різними кутами. У такому випадку складання на занадто довгому часовому інтервалі може дати вектори, що скасовують один одного. У каналах з завмиранням, коли складання на тривалому інтервалі не дає більш стабільного еталону, винахід передбачає калібрування тривалості підсумовування пілотного еталонного вектора. Винахід передбачає складання калібраційних таблиць категоруванням типів каналу в умовах тесту і надсиланням до приймачів відомої інформаціонної структури кожної категорії, наприклад, повільного завмирання, швидкого завмирання, відсутності завмирання (СГБШ) тощо, з подальшим порівнянням наближеної ЧХБ з реальною ЧХБ, яка може бути визначена з відомих структур, доступних для випробувача. Приймач класифікує довкілля каналу, аналізуючи таку інформацію, як варіації пілот-сигналу і кількість приєднаних паралельних каналів приймача. Приймач використовує калібраційну таблицю згідно з класифікацією каналів. Наприклад, калібраційна таблиця типового втілення може мати вигляд: Наближена ЧХБ Без завмирання Повільне завмирання Швидке завмирання 1´10ехр-1 +0,001% +0,005% +0,007% 1´10ехр(-1 - -3) 0,002% +0,004% +0,008% 1´10ехр(-3 - -5) -0,001% +0,003% +0,009% Приймач може використовувати таку таблицю для точних класифікацій каналів і корекцій, або він може брати більш загальні класифікації і використовувати середні значення корекцій. У випадках, коли неможливо визначити категорію типу каналу, винахід передбачає використання середніх значень калібраційної таблиці для корекції змінних характеристик каналу. Корекції потім ураховуються у обчисленнях наближеної ЧХБ. Канальні відношення сигнал/шум є різними для прямого каналу 104 і зворотного каналу 106. Екстраполяція ЧХБ згідно з винаходом може бути застосована як до прямих, так і до зворотних каналів доданням операції корекції невідомих відношень потужностей у прямих каналах. У прямому каналі біти керування потужністю не вкрапляються у субканал керування потужністю прямого каналу на рівні потужності пілот-сигналу. Рівень потужності пілот-сигналів прямого каналу є значно вищим за рівень потужності біт керування потужністю. Відношення потужностей біт керування потужністю і прямого пілотканалу є невідомим для приймача. Потужність прямого пілот-каналу звичайно становить постійну частку потужності комірки (приблизно 20%). Рівень потужності прямого субканалу керування потужністю є пов'язаною з прямим основним або домашнім каналом. Винахід передбачає менш тривале підсумовування для пілотного еталонного вікна у прямому каналі, яке дає той же рівень енергії, що і біти керування потужністю, при побудові векторів для наближеної ЧХБ прямого каналу. Для відбору з пілотного еталону елементів коду у кількості, необхідній для зрівнювання рівнів енергії обох канальних зразків, винахід передбачає огляд прийнятого відношення сигнал/шум у зразках пілотканалу і каналу керування потужністю, вимірювання різниці амплітуд канальних зразків і обчислення відношення сигнал/шум. З цих обчислень можуть бути одержані порівняно точні значення калібраційних корекцій. Винахід також передбачає використання інформації про відношення сигнал/шум, одержаної з повідомлень від БС, для калібрування ЧХБ прямого каналу. Фіг.6 ілюструє пристрій контролю частоти помилок у субканалі керування потужністю з підтриманням частоти помилок у інформаційному каналі на іншому рівні. Згорнуті псевдошумом дані надходять до демодулятора 600 даних, який демодулює ці дані згідно з зумовленою послідовністю Уолша Wt для каналу даних. У типовому втіленні де-модульовані символи надходять до елемента 602 перевірки КЦН який визначає, чи були правильними прийняті демодульовані символи. Перевірені дані надходять до процесора 604 керування. Крім того, до процесора 604 керування надходять вектор біт керування потужністю, пілотний еталонний вектор і вектор штучних біт. Процесор 604 обчислює ЧХБ субканалу керування потужністю, як це було описано вище і обчислює частоту помилок для каналу даних і субканалу керування потужністю. У типовому втіленні БС 100 передає повідомлення, яким вимагає від ТД 102 підвищити або знизити різницю між енергіями передачі пілот-каналу і каналу даних. У іншому варіанті ця операція може бути виконана незалежним керуванням енергій передачі у пілот-каналі і каналі даних. У типовому втіленні генератор 606 повідомлень генерує загальну команду підвищення/зниження для керування загальною енергією передачі ТД 102 і, крім того, генерує повідомлення про зміну співвідношення енергій передачі пілот-каналу і каналу даних. Повідомлення надходять до модулятора 608, де модулюються для передачі, після чого надходять до передавача 610, який підвищує частоту сигналу, підсилює і фільтрує символи для передачі антеною 612. Наведений вище опис бажаних втілень дозволить будь-якому фахівцю використати винахід, зробивши належні модифікації і зміни згідно з концепціями і принципами винаходу. Об'єм винаходу не обмежується наведеними втіленнями і визначається наведеними новими принципами і ознаками.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for monitoring the quality of information in a wireless communication system, a method for determining the bit sequence for controlling signal power, and a device for monitoring the error rate in such a communication system
Автори англійськоюChen Tao
Назва патенту російськоюСпособ и устройство для контроля качества информации в системе беспроводной связи, способ определения последовательности битов для регулирования мощности сигнала и устройство для контроля частоты ошибок в указанной системе связи
Автори російськоюЧен Тао
МПК / Мітки
МПК: H04B 7/005, H04Q 7/00, H04B 1/00, H04B 7/00, H04L 25/00, H04L 1/00
Мітки: потужністю, спосіб, визначення, моніторингу, інформації, зв'язку, каналі, також, безпровідному, якості, полярності, бітів, субканалу, приймач, керування
Код посилання
<a href="https://ua.patents.su/7-74167-sposib-ta-prijjmach-dlya-monitoringu-yakosti-informaci-u-bezprovidnomu-kanali-zvyazku-sposib-viznachennya-polyarnosti-bitiv-keruvannya-potuzhnistyu-a-takozh-sposib-monitoringu-yako.html" target="_blank" rel="follow" title="База патентів України">Спосіб та приймач для моніторингу якості інформації у безпровідному каналі звязку, спосіб визначення полярності бітів керування потужністю, а також спосіб моніторингу якості субканалу керування потужністю та пр</a>
Спосіб керування енергією передачі у безпровідному пристрої зв’язку
Номер патенту: 72259
Опубліковано: 15.02.2005
Автори: Сайфаддін Ахмед, Саркар Сандіп, Тідеманн Едвард Г., молодший
МПК: H04J 13/00, H04L 9/00, H04B 7/00, H04L 27/00
Мітки: енергією, керування, безпровідному, передачі, спосіб, пристрої, зв'язку
Формула / Реферат:
1. У безпровідному пристрої зв'язку спосіб керування енергією передачі у віддаленій станції у відповідь на прийняті команди керування потужністю замкненого контуру, який включає операції:(а) ідентифікації тих з зазначених прийнятих команд керування потужністю замкненого контуру, які базуються на виключених з передачі частинах сигналу зворотного каналу, причому зазначена операція ідентифікації виконується залежно від зумовленого типу...
Спосіб керування потужністю в замкненій системі керування потужністю системи зв’язку з режимом паралельного доступу з кодовим розподілом каналів (пдкр) (варіанти) та замкнена система керування потужністю систем
Номер патенту: 57747
Опубліковано: 15.07.2003
Автор: Сеінтс Кіт В.
МПК: H04B 7/00
Мітки: каналів, системі, систем, замкнена, розподілом, доступу, зв'язку, спосіб, режимом, пдкр, керування, система, паралельного, кодовим, варіанти, потужністю, замкнений
Формула / Реферат:
1. Спосіб керування потужністю в замкненій системі керування потужністю системи зв'язку з режимом паралельного доступу з кодовим розподілом каналів (ПДКР), який полягає в:вимірюванні значення енергії у смузі частот,вимірюванні енергії пілот-каналу,перерахунку зазначеної енергії пілот-каналу відповідно до значення пілотної складової для одержання значення неперешкоджаючої енергії.відніманні зазначеного значення...
Спосіб корекції рівнів потужності множини передач у безпровідній системі зв’язку (варіанти), пристрій керування потужністю для використання у безпровідній системі зв’язку та пристрій керування потужністю у базо
Номер патенту: 71054
Опубліковано: 15.11.2004
Автори: Джоу Ю-Чен, Чен Тао
МПК: H04B 7/005
Мітки: безпровідній, варіанти, системі, передач, потужності, множині, керування, пристрій, використання, спосіб, зв'язку, корекції, потужністю, рівнів, базо
Формула / Реферат:
1. Спосіб корекції рівнів потужності множини передач у безпровідній системі зв'язку, який включає:- прийом першого показника якості першої прийнятої передачі,- корекцію рівня потужності першої передачі, базуючись щонайменше частково на цьому першому показнику,- прийом другого показника якості другої прийнятої передачі, сформованого агрегуванням сукупності біт, призначених зворотному зв'язку для другої передачі, і-...
Система мовлення й приймання, а також приймач-декодер і пристрій дистанційного керування для неї
Номер патенту: 66789
Опубліковано: 15.06.2004
Автори: Деклерк Крістоф, Байасі Мулхам, Баст'єн Жан-Поль
МПК: H04N 7/173, H04N 7/16
Мітки: система, дистанційного, також, керування, мовлення, приймання, неї, приймач-декодер, пристрій
Формула / Реферат:
1. Приймальний пристрій, що містить приймач-декодер для використання при прийманні телевізійної або радіопрограми або файла даних і який включає в себе засіб для взаємодії з кредитною або банківською карткою користувача для зчитування кредитної або банківської інформації, що знаходиться на картці, а також, окремо від згаданого засобу, додатковий засіб взаємодії з певною карткою користувача, для зчитування інформації, що знаходиться на цій...
Спосіб і пристрій визначення робочої сітки частот системи звязку із стрибкоподібною зміною частоти
Номер патенту: 63931
Опубліковано: 16.02.2004
Автор: Сорочан Анатолій Григорович
МПК: G01R 23/00
Мітки: сітки, визначення, стрибкоподібною, системі, спосіб, зв'язку, частоти, зміною, робочої, частот, пристрій
Формула / Реферат:
1.Спосіб визначення робочої сітки частот системи зв’язку із стрибкоподібною зміною частоти, який ґрунтується на тому, що вхідний сигнал із стрибкоподібно змінюваною робочою частотою Wс, яка знаходиться в діапазоні частот DW, розгалужують на три частини, в першій частині сигнал зміщують по частоті на частоту гетеродину Wг1 і затримують на сталу часу t01, одержаний сигнал перемножують з другою частиною сигналу, після чого на частоті Wг1...
Попередній патент: Спосіб підігріву робочого стиснутого газу в газоструминному млині і газоструминний млин
Наступний патент: Лікування ендометріозу або безпліддя, або покращення плідності та застосування бета-адренергічного агоніста для виробництва лікарського засобу
Випадковий патент: Профіль для рамного кріплення підземних виробок