Цифровий вимірювач механічних властивостей судинної системи людини
Номер патенту: 106828
Опубліковано: 10.10.2014
Автори: Кондратов Владислав Тимофійович, Чернецький Віктор Васильович, Романов Володимир Олександрович, Брайко Юрій Олексійович, Імамутдінова Роза Гільмутдіновна
Формула / Реферат
1. Цифровий вимірювач механічних властивостей судинної системи людини, що включає в собі послідовно з'єднані між собою кодокерований генератор синусоїдальних сигналів, узгоджуючий підсилювач з парафазним виходом та перший компаратор напруги, перетворювач механічних коливань, що складається з конструктивно об'єднаних між собою диференціального індуктивного сенсора механічних коливань судин людини, металевої мембрани з магнітом'якого матеріалу та трансформатора, перший та третій виводи первинних котушок індуктивностей якого з'єднані з третім й першим виводами котушок індуктивностей диференціального індуктивного сенсора механічних коливань, другий та четвертий виводи котушок індуктивностей якого підключені до відповідних виводів змінного резистора, середній вивід якого з'єднаний з земляною шиною, мікроконтролер з вбудованим в нього комутатором каналів, що підключений до входу вбудованого аналого-цифрового перетворювача, двома цифро-аналоговими перетворювачами та годинником реального часу, клавіатуру, запам'ятовуючий пристрій, мультиплексор, формувач сигналу передачі даних на комп'ютер, цифровий друкуючий пристрій, загальну шину, рідинно-кришталевий індикатор та блок сигналізації, причому рідинно-кришталевий індикатор, блок сигналізації та вхід кодокерованого генератора синусоїдальних сигналів через загальну шину з'єднані з портом Р3 мікроконтролера, порт Р1 якого підключений до цифрових входів-виходів клавіатури, послідовний порт SPI з'єднаний зі входом запам'ятовуючого пристрою, вихід і вхід порту ПП прийому-передачі даних підключені, відповідно, до першого входу і першого виходу мультиплексора, вхід "г" керування якого з'єднаний з виходом "г" порту Р2 мікроконтролера, другий та третій виходи мультиплексора з'єднані, відповідно, з першими входами цифрового друкуючого пристрою та формувача сигналу управління, третій та другий входи підключені, відповідно, до других виходів цифрового друкуючого пристрою та формувача сигналу передачі даних на комп'ютер, вхід і вихід якого призначені для зв'язку з персональним комп'ютером, старші розряди аналогових входів порту Р0 мікроконтролера підключені, відповідно, до джерел живлення Uп1, Uп2 і Uп3 аналогових та цифрових функціональних блоків цифрового вимірювача, який відрізняється тим, що у перетворювач механічних коливань додатково введено перший та другий підсилювачі струму, послідовно з'єднані між собою і з першим підсилювачем струму шумоподавляючий підсилювач-перетворювач "напруга-струм-напруга" та другий компаратор напруги, виходи "д1" і "д2" першого та другого компараторів напруги підключені до входів "д1" і "д2" порту Р4 мікроконтролера, входи "а1" і "б" шумозаглушуючого підсилювача-перетворювача "напруга-струм-напруга" і узгоджуючого підсилювача з'єднані, відповідно, з аналоговими входами "а1" і "б" порту Р0 мікроконтролера, що є входами вбудованого в нього комутатора каналів, який підключений до входу вбудованого аналого-цифрового перетворювача, вхід першого підсилювача струму підключений до першого виводу вторинної котушки індуктивності трансформатора, другий вивід якої з'єднаний з шиною заземлення , вхід узгоджуючого підсилювача підключений до об'єднаних між собою виходу кодокерованого генератора синусоїдальних сигналів і другого та четвертого виводів первинних котушок індуктивностей трансформатора, при цьому аналоговий вихід DA1 мікроконтролера, що є виходом першого вбудованого цифро-аналогового перетворювача, через вхід "і1" другого підсилювача струму підключений до входу блока стабілізації початкового положення мембрани, вихід якого механічно з'єднаний з мембраною, яка підключена через повітровід зі стетоскопом, на який діють механічні пульсові коливання стінок кровоносної судини судинної системи людини.
2. Цифровий вимірювач механічних властивостей судинної системи людини за п. 1, який відрізняється тим, що в нього додатково введений другий перетворювач механічних коливань, вхід якого з'єднаний з виходом кодокерованого генератора синусоїдального сигналу, аналоговий вихід "а2" зсунутого по фазі сигналу підключений до аналогового входу "а2" порту Р0 мікроконтролера, вхід "д2" порту Р4 якого з'єднаний з виходом "д2" компаратора напруги другого перетворювача механічних коливань, чий аналоговий вхід "і2" установки мінімального фазового зсуву сигналів підключений до виходу "і2" порту DA2 мікроконтролера, що є виходом другого вбудованого цифро-аналогового перетворювача.
3. Цифровий вимірювач механічних властивостей судинної системи людини за п. 1, який відрізняється тим, що в нього додатково введений кодокерований генератор імпульсів, вихід "з" якого підключений до входу "з" порту Р4 мікроконтролера, з портом Р3 якого через загальну шину з'єднані цифрові входи кодокерованого генератора імпульсів.
4. Цифровий вимірювач механічних властивостей судинної системи людини за п. 1, який відрізняється тим, що в кожний перетворювач механічних коливань додатково введено послідовно включені підсилювач і компаратор напруги, паралельно з'єднані резистор і конденсатор, вмикач з пружиною та сенсор пульсу, що жорстко з'єднаний з стетоскопом і містить корпус, який оточує світлодіод і фотоприймач, вихід "м" якого підключений до входу "м" підсилювача, виходи "ж1" і "ж2" компараторів напруги підключені до входів "ж1" і "ж2" порту Р4 мікроконтролера, з портом Р3 якого з'єднані через загальну шину цифрові входи-виходи додатково введеного кодокерованого джерела живлення, його виходи "л1" і "л2" підключені до входів "л1" і "л2" перетворювачів механічних коливань, які є входами вмикачів, виходи яких з'єднані з входами живлення світлодіодів, до яких підключені перші виводи паралельно з'єднаних резистора та конденсатора, другі виводи яких підключені до земляної шини, як й другий вивід фотоприймача, при цьому прямі виходи "в1" і "в2" аналогового сигналу кожного підсилювача з'єднані з входами "в1" і "в2" порту Р0 мікроконтролера, до входів "ж1" і "ж2" порту Р4 якого підключені виходи "ж1" і "ж2" компараторів напруг, а кнопка вмикача, як й поверхня стетоскопа, з'єднана з поверхнею досліджуваного об'єкта.
Текст
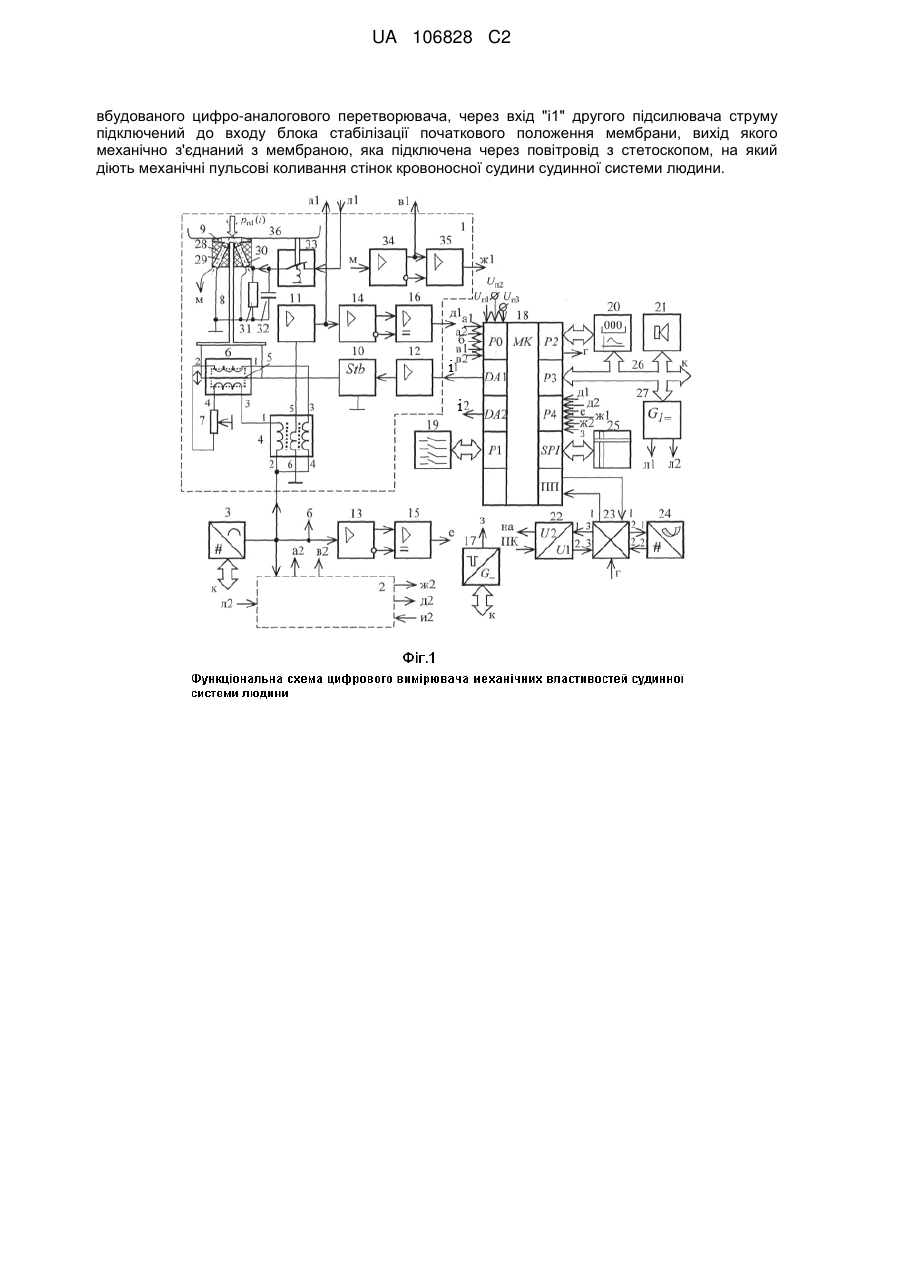
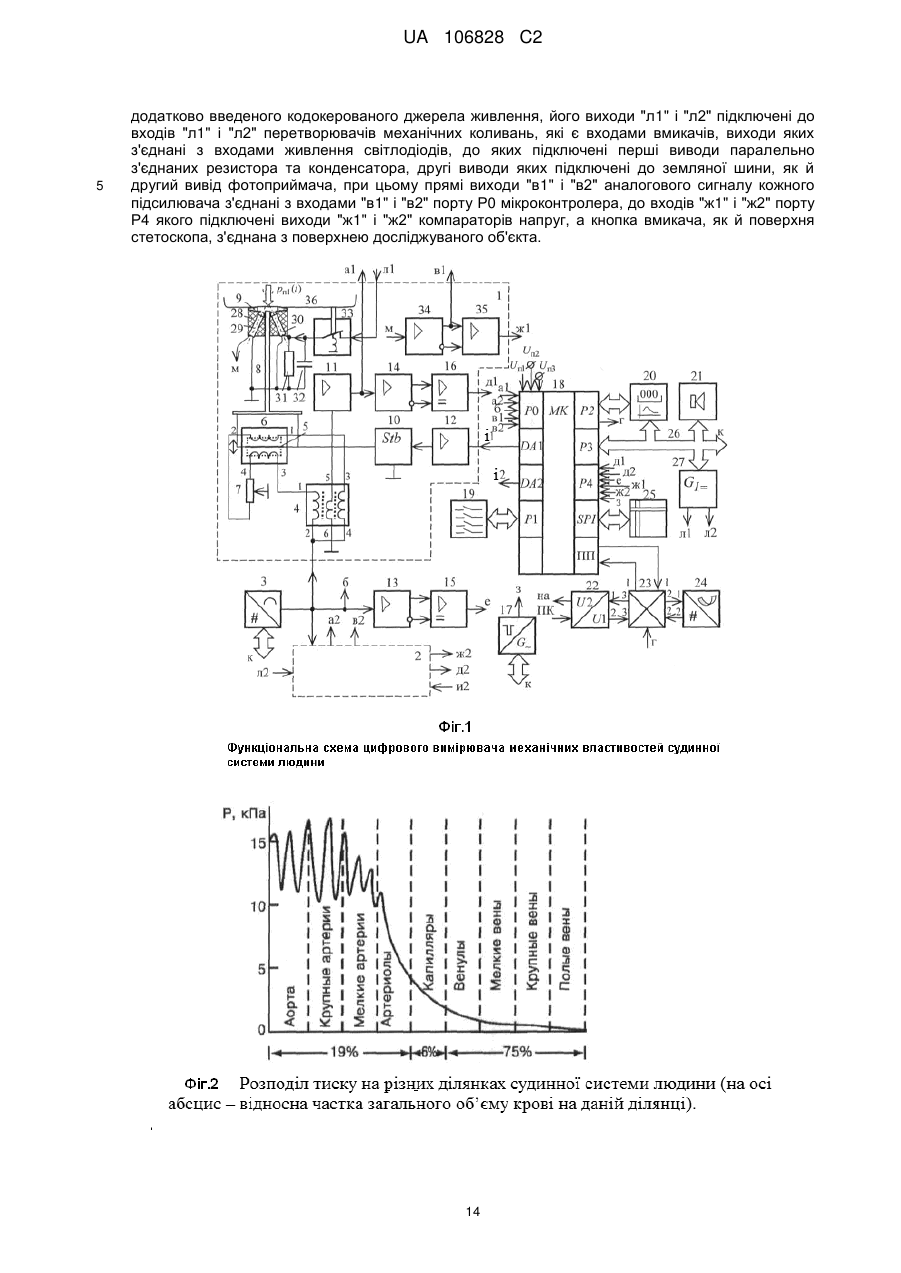
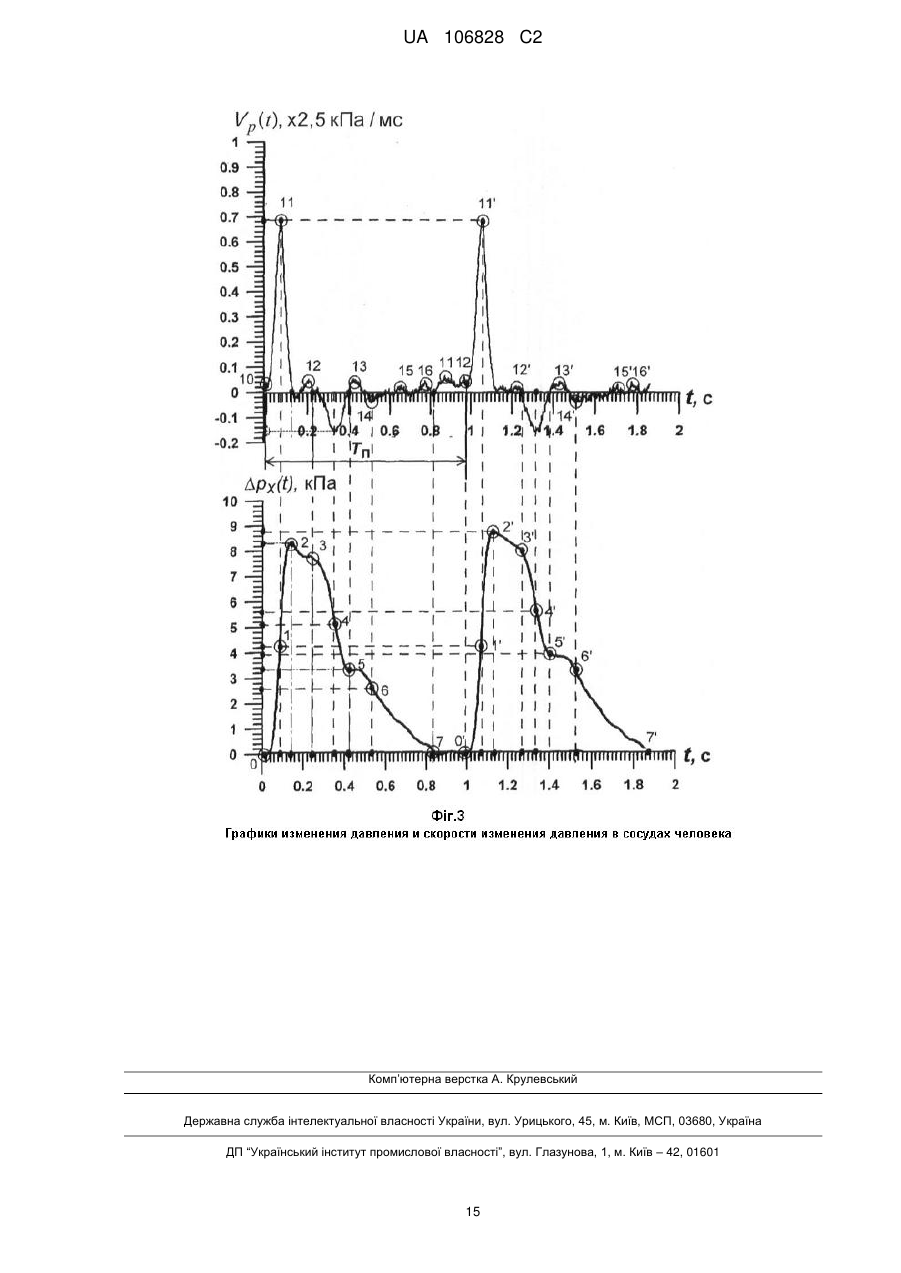
Реферат: В цифровому вимірювачі механічних властивостей судинної системи людини у перетворювач механічних коливань додатково введено перший та другий підсилювачі струму, послідовно з'єднані між собою і з першим підсилювачем струму, шумозаглушуючий підсилювачперетворювач "напруга-струм-напруга" та другий компаратор напруги, виходи "д1" і "д2" першого та другого компараторів напруги підключені до входів "д1" і "д2" порту Р4 мікроконтролера. Входи "а1" і "б" шумозаглушуючого підсилювача-перетворювача "напругаструм-напруга" і узгоджуючого підсилювача з'єднані, відповідно, з аналоговими входами "а1" і "б" порту Р0 мікроконтролера, що є входами вбудованого в нього комутатора каналів, який підключений до входу вбудованого аналого-цифрового перетворювача. Вхід першого підсилювача струму підключений до першого виводу вторинної котушки індуктивності трансформатора, другий вивід якої з'єднаний з шиною заземлення. Вхід узгоджуючого підсилювача підключений до об'єднаних між собою виходу кодокерованого генератора синусоїдальних сигналів і другого та четвертого виводів первинних котушок індуктивностей трансформатора. При цьому аналоговий вихід DA1 мікроконтролера, що є виходом першого UA 106828 C2 (12) UA 106828 C2 вбудованого цифро-аналогового перетворювача, через вхід "і1" другого підсилювача струму підключений до входу блока стабілізації початкового положення мембрани, вихід якого механічно з'єднаний з мембраною, яка підключена через повітровід з стетоскопом, на який діють механічні пульсові коливання стінок кровоносної судини судинної системи людини. UA 106828 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до області медичного приладобудування, зокрема до цифрових вимірювачів механічних властивостей судинної системи людини, і може бути використаний для медичних досліджень стану судинної системи людини в нормі та при патології. Відомий цифровий вимірювач механічних властивостей судинної системи людини (див., наприклад, Патент РФ № 2192619 С1. Фадин И.М., Александров B.C., Кружков М.Е., Фадин С.И. Индуктивный измеритель линейных перемещений. Режим доступу: http://www.findpatent.ru/patent/219/2192619.html), що включає в собі: 1. Індуктивний вимірювач лінійних переміщень, що містить дві котушки індуктивності, які включені диференційно у коло змінного струму, сердечник, виконаний з феромагнітного матеріалу і розташовані співвісно з котушками індуктивності, а також показник положення феромагнітного сердечника, і відрізняється тим, що на боковій поверхні феромагнітного сердечника розміщена відокремлена електроізоляцією обмотка з електропроводу, кінці якого ізольовані від будь-якої зовнішнього електричного кола. 2. Індуктивний вимірювач за п. 1, який відрізняється тим, що обмотка, що розміщена на боковій поверхні феромагнітного сердечника, виконана у вигляді одношарової циліндричної спіралі, витки якої рівномірно розташовані на поверхні феромагнітного сердечника. 3. Індуктивний вимірювач за п. 1, який відрізняється тим, що обмотка, що розміщена на боковій поверхні феромагнітного сердечника, виконана у вигляді одного спірального витка електропроводу. 4. Індуктивний вимірювач за п. 1, який відрізняється тим, що обмотка, що розміщення на боковій поверхні феромагнітного сердечника, виконана багатошаровою з електропроводу, який покритий електроізоляцією. Відомому цифровому вимірювачу притаманні недостатня точність визначення механічних властивостей судинної системи людини, в тому числі і швидкості зміни тиску на стінки судини людини. Наявність сердечника, який дуже масивний і інерційний, приводить до зменшення чутливості вимірювача. У відомому цифровому вимірювачі не закладено метрологічний самоконтроль вимірювального каналу, який чутливий до дії зовнішніх дестабілізуючих факторів. Використання амплітудної модуляції призводить до підвищення чутливості відомого цифрового вимірювача до дії зовнішніх дестабілізуючих факторів. Відомий вимірювач має обмежені функціональні можливості, оскільки не забезпечує вимірювання та фіксацію поточного часу дії тиску крові на стінки судини, диференціювання та інтегрування отриманих сигналів, одночасне вимірювання механічних властивостей судин на правій та лівій кінцівках людини, як й одночасне вимірювання пульсової хвилі оптичним методом. Технічне рішення вимірювача морально застаріле і не відповідає сучасним вимогам щодо споживання енергії, метрологічного самоконтролю, накопичення, обробки, роздрукування та передачі інформації тощо. Відомий цифровий вимірювач механічних властивостей судинної системи людини (див., наприклад, Прецизионный измеритель перемещения. Режим доступу: http://www.qrz.ru/schemes/contribute/digest/ohran44.shtml), який складається з автогенератора коливань, індуктивного перетворювача і низьковольтного стабілізатора постійної напруги. Цей вимірювач є більш прогресивним і забезпечує більш високу точність вимірювання, ніж попередній. Однак його використання для дослідження механічних властивостей судини людини проблематично. У відомому цифровому вимірювачі не закладено метрологічний самоконтроль вимірювального каналу. Використання амплітудної модуляції приводить до підвищеної чутливості відомого вимірювача до дії зовнішніх дестабілізуючих факторів. Відомий вимірювач має обмежені функціональні можливості, оскільки не забезпечує вимірювання швидкості зміни тиску у судинах та фіксацію поточного часу дії тиску крові на судини, диференціювання та інтегрування отриманих сигналів, одночасне вимірювання механічних властивостей судин на правій та лівій кінцівках людини, як й одночасне вимірювання пульсової хвилі оптичним методом тощо. Технічне рішення вимірювача морально застаріле і не вимагає сучасним вимогам щодо споживання енергії, метрологічного самоконтролю, накопичення, обробки, роздрукування та передачі інформації тощо. Якщо з'єднати диференціальний сенсор (див., наприклад, Аристов Е.В., Хузин Р.А. Исследование индуктивных датчиков. Режим доступу: http://pstu.ru/files/file/Kaf_eagp/3.pdf) та необхідні периферійні функціональні блоки з мікропроцесором чи мікроконтролером, то можна створити цифровий вимірювач механічних властивостей судинної системи людини, який включає послідовно з'єднані між собою кодокерований генератор синусоїдальних сигналів, узгоджуючий підсилювач з парафазним виходом та перший компаратор напруги, перетворювач механічних коливань, що складається з конструктивно об'єднаних між собою диференціального індуктивного сенсора механічних коливань судин людини, металевої мембрани з магнітом'якого 1 UA 106828 C2 5 10 15 20 25 30 35 40 45 50 55 60 матеріалу та трансформатора, перший та третій виводи первинних котушок індуктивностей якого з'єднані з третім й першим виводами котушок індуктивностей диференціального індуктивного сенсора механічних коливань, другий та четвертий виводи котушок індуктивностей якого підключені до відповідних виводів змінного резистора, середній вивід якого з'єднаний з земляною шиною, мікроконтролер з вбудованим в нього комутатором каналів, що підключений до входу вбудованого аналого-цифрового перетворювача, двома цифро-аналоговими перетворювачами та годинником реального часу, клавіатуру, запам'ятовуючий пристрій, мультиплексор, формувач сигналу управління, цифровий друкуючий пристрій, загальну шину, рідинно-кришталевий індикатор та блок сигналізації, причому рідинно-кришталевий індикатор, блок сигналізації та вхід кодокерованого генератора синусоїдальних сигналів через загальну шину з'єднані з портом Р2 мікроконтролера, порт Р1 якого підключений до цифрових входіввиходів клавіатури, послідовний порт SPI з'єднаний зі входом запам'ятовуючого пристрою, вихід і вхід порту ПП прийому-передачі даних підключені, відповідно, до першого входу і першого виходу мультиплексора, вхід «г» керування якого з'єднано з виходом «г» порту Р0 мікроконтролера, другий та третій виходи мультиплексора з'єднані, відповідно, з першими входами цифрового друкуючого пристрою та формувача сигналу передачі даних на комп'ютер, третій та другий входи підключені, відповідно, до других виходів цифрового друкуючого пристрою та формувача сигналу управління, вхід і вихід якого призначені для зв'язку з персональним комп'ютером, аналогові входи порту Р0 мікроконтролера підключені, відповідно, до джерел живлення Uп1, Uп2 і Uп3 аналогових та цифрових функціональних блоків цифрового вимірювача. Відомому цифровому вимірювачу притаманні недостатня точність вимірювання швидкості зміни тиску крові на стінки судини людини, що обумовлена відсутністю метрологічного самоконтролю вимірювального каналу, чутливістю його дії зовнішніх дестабілізуючих факторів, обмежені функціональні можливості цифрового вимірювача щодо одночасного вимірювання тиску у однойменних судинах лівої та правої частин тіла та кінцівок людини, перетворення та обробки сигналів, обчислення параметрів форми кривої, що характеризує механічні властивості судин людини. Відомий цифровий вимірювач не забезпечує одночасне вимірювання пульсової хвилі оптичним методом. Відомий цифровий вимірювач механічних властивостей судинної системи людини (див., наприклад, ″Патент РФ № 2338458. МПК Ийеш Миклош (HU), Береш Йожеф (HU). Устройство и способ для измерения геодинамических параметров). Режим доступа: http://www.freepatent.ru/patents/2338458), який (мовою оригінала) содержит окклюзивный, осциллометрический автоматический измеритель кровяного давления и блоки определения величины гемодинамических параметров, включающие арифметический блок (6) вычисления амплитуды, определяющий индекс аугментации (АIх), отличающееся тем, что устройство содержит: детектор (1) разделения и хранения сигналов осцилляционной волны, выполненный с частотой дискретизации, по меньшей мере, 200 выборок за один сердечный цикл и блоком (5) памяти, разрешение которого организовано, по меньшей мере, с 9 битами; синтезаторный блок (9), выполненный с возможностью определения длительности выброса (ED), арифметический блок (6) вычисления амплитуды и синтезаторный блок (9), соединенные в общий программный контроллер (26) и компилированные в анализатор (2). 2. Устройство по п. 1, отличающееся тем, что частота дискретизации детектора (1) разделения и хранения сигналов составляет от 180 до 220 выборок в секунду, при этом блок (5) памяти для хранения сигналов, создаваемых с помощью волны колебаний, имеет организацию в 10-12 бит. 3. Устройство по п.1, отличающееся тем, что оно комбинировано с круглосуточным переносным амбулаторным монитором кровяного давления. 4. Устройство по п. 1, отличающееся тем, что оно включено в телемедицинскую систему домашнего ухода. 5. Устройство по п. 1, отличающееся тем, что оно комбинировано с круглосуточным монитором кровяного давления, управляемого встроенным блоком ЭКГ. 6. Устройство для измерения гемодинамических характеристик, в частности показателя увеличения аорты (АIх) и/или длительности выброса (ED) посредством неинвазивного, основанного на манжете окклюзивного измерения кровяного давления, содержащее окклюзивный, осциллометрический автоматический измеритель кровяного давления и блоки определения величины гемодинамических параметров, включающие арифметический блок (6) вычисления амплитуды, определяющий индекс аугментации (АIх), отличающееся тем, что содержит: детектор (1) разделения и хранения сигналов осцилляционной волны, выполненный с частотой дискретизации, по меньшей мере, 200 выборок за один сердечный цикл и блок (5) 2 UA 106828 C2 5 10 15 20 25 30 35 40 45 50 55 60 памяти, разрешение которого организовано, по меньшей мере, с 9 битами; синтезаторный блок (9), выполненный с возможностью определения длительности выброса (ED), арифметический блок (7) вычисления времени, выполненный с возможностью определения скорости пульсовой волны (PWV), блок (3) интегратора, определяющий показатель систолической области (SAI), и показатель диастолической области (DAI); арифметический блок (6) вычисления амплитуды и синтезаторный блок (9), соединенные в общий программный контроллер (26) и компилированные в анализатор (2). 7. Устройство по п. 6, отличающееся тем, что частота дискретизации детектора (1) разделения и хранения сигналов составляет от 180 до 220 выборок в секунду, при этом блок (5) памяти для хранения сигналов, создаваемых с помощью волны колебаний, имеет организацию в 10-12 бит. 8. Устройство по п. 6, отличающееся тем, что оно комбинируется с круглосуточным переносным амбулаторным монитором кровяного давления. 9. Устройство по п. 6, отличающееся тем, что оно включено в телемедицинскую систему домашнего ухода. 10. Устройство по п. 6, отличающееся тем, что оно комбинировано с круглосуточным монитором кровяного давления, управляемого встроенным блоком ЭКГ.″ При всіх описаних перевагах, недоліком відомого цифрового вимірювача механічних властивостей судинної системи людини є неможливість безпосереднього і точного визначення швидкості зміни тиску у одній чи у двох заданих точках досліджуваної судини людини. Це не дає можливість використати, без введення додаткових функціональних блоків, зазначений цифровий вимірювач для вирішення поставленої технічної задачі автоматичного неінвазивного вимірювання механічних властивостей судинної системи людини, параметрів руху стінок артерії (переміщення, швидкість переміщення, прискорення), параметрів форми кривої пульсової хвилі тощо. Поставлена технічна задача створення такого цифрового вимірювача механічних властивостей судинної системи людини, який би забезпечив автоматичне неінвазивне і високоточне (з фільтрацією шумів) вимірювання механічних властивостей судинної системи людини (швидкості зміни тиску крові на судини людини, приріст тиску, час зміни в нормі та при патологіях тощо); параметрів руху стінок артерії (переміщення, швидкість переміщення, прискорення), параметрів форми кривої, що описує механічні властивості судин; одночасне вимірювання тиску у однойменних судинах лівої та правої частин тіла та кінцівок людини; одночасне вимірювання пульсової хвилі та її параметрів; видавав оброблені результати вимірювань і обчислень на екран рідинно-кришталевого індикатора та на паперовому носії, у формі діагностичної карти тощо. Вирішення поставленої технічної задачі досягається тим, цифровий вимірювач механічних властивостей судинної системи людини, що включає послідовно з'єднані між собою кодокерований генератор синусоїдальних сигналів, узгоджуючий підсилювач з парафазним виходом та перший компаратор напруги, перетворювач механічних коливань, що складається з конструктивно об'єднаних між собою диференціального індуктивного сенсора механічних коливань судин людини, металевої мембрани з магнітом'якого матеріалу та трансформатора, перший та третій виводи первинних котушок індуктивностей якого з'єднані з третім й першим виводами котушок індуктивностей диференціального індуктивного сенсора механічних коливань, другий та четвертий виводи котушок індуктивностей якого підключені до відповідних виводів змінного резистору, середній вивід якого з'єднаний з земляною шиною, мікроконтролер з вбудованим в нього комутатором каналів, що підключений до входу вбудованого аналогоцифрового перетворювача, двома цифро-аналоговими перетворювачами та годинником реального часу, клавіатуру, запам'ятовуючий пристрій, мультиплексор, формувач сигналу управління, цифровий друкуючий пристрій, загальну шину, рідинно-кришталевий індикатор та блок сигналізації, причому рідинно-кришталевий індикатор, блок сигналізації та вхід кодокерованого генератора синусоїдальних сигналів через загальну шину з'єднані з портом Р3 мікроконтролера, порт Р1 якого підключений до цифрових входів-виходів клавіатури, послідовний порт SPI з'єднаний зі входом запам'ятовуючого пристрою, вихід і вхід порту ПП прийому-передачі даних підключені, відповідно, до першого входу і першого виходу мультиплексора, вхід «г» керування якого з'єднаний з виходом «г» порту Р2 мікроконтролера, другий та третій виходи мультиплексора з'єднані, відповідно, з першими входами цифрового друкуючого пристрою та формувача сигналу передачі даних на комп'ютер, третій та другий входи підключені, відповідно, до других виходів цифрового друкуючого пристрою та формувача сигналу управління, вхід і вихід якого призначені для зв'язку з персональним комп'ютером, старші розряди аналогових входів порту Р0 мікроконтролера підключені, відповідно, до джерел 3 UA 106828 C2 5 10 15 20 25 30 35 40 45 50 55 живлення Uп1, Uп2 і Uп3 аналогових та цифрових функціональних блоків цифрового вимірювача, від відомих відрізняється тим, що у перетворювач механічних коливань додатково введено перший та другий підсилювачі струму, послідовно з'єднані між собою і з першим підсилювачем струму шумозаглушуючий підсилювач-перетворювач «напруга-струм-напруга» та другий компаратор напруги, виходи «д1» і «e» першого та другого компараторів напруги підключені до входів «д1» і «e» порту Р4 мікроконтролера, входи «а1» і «б» шумозаглушуючого підсилювачаперетворювача «напруга-струм-напруга» і узгоджуючого підсилювача з'єднані, відповідно, з аналоговими входами «а1» і «б» порту Р0 мікроконтролера, що є входами вбудованого в нього комутатора каналів, який підключений до входу вбудованого аналого-цифрового перетворювача, вхід першого підсилювача струму підключений до першого виводу вторинної котушки індуктивності трансформатора, другий вивід якої з'єднаний з земляною шиною, вхід узгоджуючого підсилювача підключений до об'єднаних між собою виходу кодокерованого генератора синусоїдальних сигналів і другого та четвертого виводам первинних котушок індуктивностей трансформатора, при цьому аналоговий вихід DA1 мікроконтролера, що є виходом першого вбудованого цифро-аналогового перетворювача, через вхід «і1» другого підсилювача струму підключений до входу блока стабілізації початкового положення мембрани, вихід якого механічно з'єднаний з мембраною, яка підключена через повітровід з стетоскопом, на який діють механічні пульсові коливання стінок кровоносної судини судинної системи людини. 2. Цифровий вимірювач механічних властивостей судинної системи людини за п. 1 від відомих відрізняється тим, що в нього додатково введений другий перетворювач механічних коливань, вхід якого з'єднаний з виходом кодокерованого генератора синусоїдального сигналу, аналоговий вихід «а2» зсунутого по фазі сигналу підключений до аналогового входу «а2» порту Р0 мікроконтролера, вхід «ж2» порту Р4 якого з'єднаний з виходом «ж2» компаратора напруги другого перетворювача механічних коливань, чий аналоговий вхід «і2» установки мінімального фазового зсуву сигналів підключений до виходу «і2» порту DA2 мікроконтролера, що є виходом другого вбудованого цифро-аналогового перетворювача. 3. Цифровий вимірювач механічних властивостей судинної системи людини за п. 1 від відомих відрізняється тим, що в нього додатково введений кодокерований генератор імпульсів, вихід «з» якого підключений до входу «з» порту Р4 мікроконтролера, з портом Р3 якого через загальну шину з'єднані цифрові входи кодокерованого генератора імпульсів. 4. Цифровий вимірювач механічних властивостей судинної системи людини за п. 1 відрізняється тим, що в кожний перетворювач механічних коливань додатково введено кодокероване джерело живлення, послідовно включені підсилювач і компаратор напруги, паралельно з'єднані резистор і конденсатор, вмикач з пружиною та сенсор пульсу, що жорстко з'єднаний з стетоскопом і містить корпус, який оточує повітровід, світлодіод і фотоприймач, вихід якого підключений до входу підсилювача, виходи «ж1» і «ж2» компараторів напруги підключені до входів «ж1» і «ж2» порту РА мікроконтролера, з портом Р3 якого з'єднані через загальну шину цифрові входи-виходи кодокерованого джерела живлення, його виходи «л1» і «л2» підключені до входів «л1» і «л2» перетворювачів механічних коливань, які є входами вмикачів, виході яких з'єднані з входами живлення світлодіодів, до яких підключені перші виводи паралельно з'єднаних резистора та конденсатора, другі виводи яких підключені до земляної шини, як й другий вивід фотоприймача, при цьому прямі виходи «в1» і «в2» аналогового сигналу кожного підсилювача з'єднані з входами «в1» і «в2» порту Р0 мікроконтролера, до входів «ж1» і «ж2» порту Р4 якого підключені виходи «ж1» і «ж2» компараторів напруг, а кнопка вмикача, як й поверхня стетоскопу, з'єднана з поверхнею досліджуваного об'єкта. На фіг. 1 наведена функціональна схема цифрового вимірювача механічних властивостей судинної системи людини, де 1 і 2 - перший та другий перетворювачі механічних коливань; 3 кодокерований генератор синусоїдальних сигналів; 4 - трансформатор; 5 - мембрана з магнітом'якого матеріалу; 6 - диференціальний індуктивний сенсор механічних коливань судин людини; 7 - змінний резистор; 8 - повітровід; 9 - стетоскоп; 10 - блок стабілізації початкового положення мембрани; 11 і 12 - перший та другий підсилювачі струму; 13 - узгоджуючий підсилювач, 14 - шумозаглушуючий підсилювач-перетворювач «напруга-струм-напруга»; 15 і 16 - перший та другий компаратори напруги; 17 - кодокерований генератор імпульсів; 18 мікроконтролер, 19 - клавіатура, 20 - рідинно-кришталевий індикатор, 21 - блок сигналізації, 22 формувач сигналу управління, 23 - мультиплексор, 24 - цифровий друкуючий пристрій, 25 запам'ятовуючий пристрій, 26 - загальна шина, 27 - джерело живлення світлодіодів, 28 - корпус сенсора пульсу, 29 - фотоприймач, 30 - світлодіод, 31 - резистор, 32 - конденсатор, 33 - вмикач 4 UA 106828 C2 5 10 15 20 25 30 35 40 45 50 55 60 з пружиною, 34 - підсилювач, 35 - компаратор напруги, 36 - поверхня досліджуваного об'єкта (судини людини). На фіг. 2 наведено графічне представлення розподілу тиску на різних ділянках судинної системи людини. На фіг. 3 наведено графік, що відображає швидкість зміни тиску у судині людини протягом дії пульсової хвилі та графік зміни абсолютного значення тиску у судині за часом. При цьому входи першого та другого перетворювачів механічних коливань 1 і 2 з'єднані між собою та підключені до виходу кодокерованого генератора синусоїдальних коливань 3. До виходу кодокерованого генератора синусоїдальних сигналів 3 підключені також об'єднані між собою виводи «2» і «4» первинних котушок індуктивності трансформатора 4. Кодокерований генератор синусоїдальних сигналів 3, узгоджуючий підсилювач 13 з парафазним виходом та перший компаратор напруги 15 послідовно з'єднані між собою. Перетворювач механічних коливань 1 складається з конструктивно об'єднаних між собою диференціального індуктивного сенсора 6 механічних коливань судин людини, металевої мембрани 5 з магнітом'якого матеріалу та трансформатора 4. Перший та третій виводи первинних котушок індуктивностей трансформатора 4 з'єднані з третім й першим виводами котушок індуктивностей диференціального індуктивного сенсора 6 механічних коливань. Другий та четвертий виводи котушок індуктивностей диференціального індуктивного сенсора 6 механічних коливань підключені до відповідних виводів змінного резистора 7, середній вивід якого з'єднаний з земляною шиною. Мікроконтролер 18 має вбудований в нього комутатором каналів, що підключений до входу вбудованого аналого-цифрового перетворювача, два вбудованих цифро-аналогових перетворювачі та вбудований годинник реального часу. До складу цифрового вимірювача механічних властивостей судинної системи людини входять також клавіатура 19, запам'ятовуючий пристрій 25, мультиплексор 23, формувач сигналу передачі даних 22 на комп'ютер, цифровий друкуючий пристрій 24, загальна шина 26, рідинно-кришталевий індикатор 20 та блок сигналізації 21. Причому рідинно-кришталевий індикатор 20, блок сигналізації 21 та вхід кодокерованого генератора 3 синусоїдальних сигналів через загальну шину 26 з'єднані з портом Р3 мікроконтролера 18. Порт Р1 мікроконтролера 18 підключений до цифрових входів-виходів клавіатури 19. Послідовний порт SPI з'єднаний зі входом запам'ятовуючого пристрою 25. Вихід і вхід порту ПП прийому-передачі даних підключені, відповідно, до першого входу і першого виходу мультиплексора 23, вхід «г» керування якого з'єднаний з виходом «г» порту Р1 мікроконтролера 18. Другий та третій виходи мультиплексора 23 з'єднані, відповідно, з першими входами цифрового друкуючого пристрою 24 та формувача 22 сигналу передачі даних на комп'ютер, третій та другий входи підключені, відповідно, до других виходів цифрового друкуючого пристрою 24 та формувача 22 сигналу передачі даних на комп'ютер. Старші розряди аналогових входів порту Р0 мікроконтролера підключені, відповідно, до джерел живлення Uп1, Uп2 і Uп3 аналогових та цифрових функціональних блоків цифрового вимірювача. Від відомих цифровий вимірювач механічних коливань відрізняється тим, що у перетворювач механічних коливань 1 додатково введено перший та другий підсилювачі струму 11 та 12, послідовно з'єднані між собою і з першим підсилювачем струму 11 шумозаглушуючий підсилювач-перетворювач «напруга-струм-напруга» 14 та другий компаратор напруги 16. Виходи «e» і «д» першого та другого компараторів напруги 15 і 16 підключені до входів «e» і «д1» порту Р4 мікроконтролера 18. Входи «а1» і «б» шумозаглушуючого підсилювачаперетворювача «напруга-струм-напруга» 14 і узгоджуючого підсилювача 13 з'єднані, відповідно, з аналоговими входами «а1» і «б» порту Р0 мікроконтролера 18, що є входами вбудованого в нього комутатора каналів, який підключений до входу вбудованого аналого-цифрового перетворювача. Вхід першого підсилювача струму 11 підключений до першого виводу «5» вторинної котушки індуктивності трансформатора 4, другий вивід «6» якої з'єднаний з земляною шиною. Вхід узгоджуючого підсилювача 13 підключений до об'єднаних між собою виходу кодокерованого генератора синусоїдальних сигналів 3 і до виводам «2» і «4» первинних котушок індуктивностей трансформатора. При цьому аналоговий вихід «і1» DA1 мікроконтролера 18, що є виходом першого вбудованого цифро-аналогового перетворювача, через другий підсилювач струму 12 підключений до входу блока стабілізації 10 початкового положення мембрани. Вихід блока стабілізації 10 механічно з'єднаний з мембраною 5, яка підключена через воздуховод 8 з стетоскопом 9, на який діють механічні пульсові коливання стінок кровоносної судини судинної системи людини. 5 UA 106828 C2 5 10 15 20 25 30 35 40 45 50 55 Цифровий вимірювач механічних властивостей судинної системи людини за п. 1 від відомих відрізняється ще тим, що в нього додатково введений другий перетворювач механічних коливань 2, вхід якого з'єднаний з виходом кодокерованого генератора синусоїдального сигналу 3. Аналоговий вихід «а2» зсунутого по фазі сигналу другого перетворювача механічних коливань 2 підключений до аналогового входу «а2» порту Р0 мікроконтролера 18. Вхід «ж2» порту Р4 мікроконтролера 18 з'єднаний з виходом «ж2» компаратора напруги другого перетворювача механічних коливань 2. Аналоговий вхід «і2» установки мінімального фазового зсуву сигналів другого перетворювача механічних коливань 2 підключений до виходу «і2» порту DA2 мікроконтролера 18, що є виходом другого вбудованого цифро-аналогового перетворювача. Цифровий вимірювач механічних властивостей судинної системи людини за п. 1 від відомих відрізняється також тим, що в нього додатково введений кодокерований генератор імпульсів 17, вихід «з» якого підключений до входу «з» порту Р4 мікроконтролера 18, з портом Р3 якого через загальну шину 26 з'єднані цифрові входи кодокерованого генератора імпульсів 17. Цифровий вимірювач механічних властивостей судинної системи людини за п. 1 відрізняється тим, що в кожний перетворювач механічних коливань 1 і 2 додатково введені кодокероване джерело живлення 27, послідовно включені підсилювач 34 і компаратор напруги 35, паралельно з'єднані резистор 31 і конденсатор 32, вмикач 33 з пружиною та сенсор пульсу. Сенсор пульсу жорстко з'єднаний з стетоскопом 9 і складається з корпусу 28, який оточує воздуховод 8, з світлодіода 30 і фотоприймача 29. Вихід фотоприймача 29 підключений до входу підсилювача 34. Як вже відмічалося, виходи «ж1» і «ж2» компараторів напруги 35 (і 35', на рисунку не відмічений) підключені до входів «ж1» і «ж2» порту Р4 мікроконтролера 18. З портом Р3 мікроконтролера 18 з'єднані через загальну шину 26 цифрові входи-виходи кодокерованого джерела живлення 27, виходи «л1» і «л2» якого підключені до входів «л1» і «л2» перетворювачів механічних коливань 1 і 2, які є входами вмикачів 33 (і 33'). Виходи вмикачів 33 (і 33') з'єднані з входами живлення світлодіодів 30 (і 30'). До входів живлення світлодіодів 30 (30') підключені перші виводи паралельно з'єднаних резистора 31 та конденсатора 32. Другі виводи підключені до земляної шини, як й другий вивід фотоприймача 29. При цьому прямі виходи «в1» і «в2» аналогового сигналу кожного підсилювача 34 (і 34') з'єднані з входами «в1» і «в2» порту Р0 мікроконтролера 18, до входів «ж1» і «ж2» порту Р4 якого підключені виходи «ж1» і «ж2» компараторів напруг 35 (і 35'). Кнопка вмикача 33, як й поверхня стетоскопа, з'єднана з поверхнею досліджуваного об'єкта 36. До розглядання суті роботи цифрового вимірювача механічних властивостей судинної системи людини пояснимо, що реєстрацією пульсових коливань стінок кровоносної судини, у тому числі й графічною реєстрацією, займається сфігмографія. При механічній сфігмографії пульсацію сприймають з поверхні шкіри над досліджуваною судиною за допомогою сенсору, що накладається на область пульсації. У якості останніх використовують пневматичні, п'єзоелектричні, ємнісні, індуктивні і тензометричні сенсори. Сфігмографія використовується як самостійний метод дослідження для оцінки стану системи кровообігу і діагностики деяких захворювань (порок серця тощо). Артеріальна сфігмограма відображає коливання стінок ділянки артерії в результаті зміни тиску в судині, за параметрами яких можна судити про стан судин людини. За літературними даними (див., наприклад, Лекция 9. Физические основы геодинамики. Режим доступа: http://vmede.org/sait/?page= 11&id=Medbiofizika_fedorov_2008&menu=Medbiofizika_fedorov_2008) розподіл тиску на різних ділянках судинної системи людини різний (див. фіг. 2). Тому, згідно з фіг. 2, доцільно вимірювати механічні властивості аорти, крупних та деяких мілких артерій. В артеріолах і далі коливання тиску практично відсутнє. Пульсова хвиля являє собою хвилеподібне коливання еластичної стінки артеріальних судин. Ці коливання виникають в момент систоли в аорті, коли систолічний об'єм крові розтягує її стінки і викликане нею коливання розповсюджуються по стінках артерій і по стовбцю крові, що знаходиться в них. Під механічними коливаннями будемо розуміти квазіперіодичні зміни у часі параметрів руху стінок артерії (переміщення, швидкість переміщення, прискорення) за рахунок дії тиску крові. Механічні властивості кровоносних судин визначаються, головним чином, властивостями колагену, еластину і гладких м'язових волокон. Зміст цих складових судинної тканини змінюється по ходу кровоносної системи. Від них залежить напруженість стінки артерії та її товщина. 6 UA 106828 C2 5 10 15 20 25 30 35 40 45 50 55 60 Амплітуда коливань стінки судини прямо пропорційна діаметру артерії і обернено пропорціональна напруженості стінки артерії та її товщині. Чим жорсткіше артерії, тим нижче амплітуда коливань при одному й тому ж значенні тиску. Зміна амплітуди коливань стінки судини залежить від зміни тиску крові і залежить від пружності і еластичності аорти і артерій внаслідок вікової зміни будови стінок кровоносних сосудів, особливо при артеріосклерозі. На сучасному етапі розвитку сфігмографії разом з вимірюванням механічних коливань стінок судини людини стало необхідним синхронно вимірювати пульсову хвилю оптичним методом, тобто за рахунок поглинання кров'ю потоку оптичного випромінювання заданої довжини хвилі і потужності. Це дає додаткову інформацію про стан судини на лівій чи/та на правій сторонах тіла людини, в тому числі й на кінцівках. Додаткова інформація про стан судини збагачує наші уявлення про механізми кровонаповнення судини та її еластичність. Використання у запропонованому технічному рішенні сенсора, чутливого до швидкості зміни тиску у судинах протягом дії пульсової хвилі, дає можливість вимірювати і аналізувати прискорення, як функцію часу, тиску на стінки судини, частоту серцевих скорочень, її девіацію, наявність низько- та високочастотних гармонік, параметри форми кривої тощо. До числа найбільш проблемних з клінічної точки зору відносяться наступні патології, що призводять до зміни параметрів кривої швидкості зміни тиску на стінки судин людини: - звуження внутрішнього діаметра судини, обумовлене відкладенням холестеринових бляшок; - утворення локального тромбу на внутрішній стінки судини у найбільш проблемних зонах (наприклад, вен нижніх кінцівок); - витончення стінки судини, що викликано її розшаруванням (аневризм) і яке призводить до його можливому розриву. Ці патології по різному відображаються на сфігмограмі і пульсограмі. За літературними даними (див. Медицинская и биологическая физика. Курс лекций с задачами: учеб. пособие / В.Н. Федорова, Е.В. Фаустов. - 2008. - 592 с. Режим доступу: http://vmede.org/sait/?page =11&id=Medbiofizika_fedorov2008&menu=Medbiofizika_fedorov_2008), перетин судин кровоносної системи протягом доби відчувають періодичні зміни, що призводить до зміни механічних властивостей тих чи інших судин у часі. Це пов'язано з тим, що протяжність судин вельми велика (100 000 км) і 7-8 літрів крові для їх максимального заповнення явно недостатньо. Тому найбільш інтенсивно постачаються ті органи, які в даний момент часу працюють з максимальним навантаженням. Перетин інших судин в цей момент зменшується. Це явище можна спостерігати за кривими прискорення тиску за час дії пульсової хвилі, якщо здійснити вимірювання параметрів функції прискорення пульсової хвилі у заданих точках судини з лівої та правої сторін людини через кожні дві години (8, 10, 12, 14, 16, 18, 20 і т. ін.) протягом доби. Порівнюючи, можна виявити порушення властивостей судин людини у просторі та у часі. При цьому слід враховувати і дію дихального процесу на тиск крові у судинах. Тому бажано проводити досліджування патологій серцево-судинної системи людини не тільки протягом 1-2 пульсових хвиль, але й за час дихального циклу, тобто за 10-15 секунд. Все вищесказане робить рішення проблеми діагностики патологій судинної системи людини надзвичайно актуальним, як й розробку цифрового вимірювача механічних властивостей судин людини. Розглянемо суть роботи запропонованого технічного рішення цифрового вимірювача механічних властивостей судин людини, зокрема швидкості зміни тиску у судинах людини протягом дії пульсової хвилі. В основу запропонованого технічного рішення поставлено вимірювання фазового зсуву між двома синусоїдальними сигналами, який обумовлений дією швидкості зміни тиску на стінки судини людини. У якості опорного сигналу з частотою, близькою до 1 кГц, використовується вихідний сигнал кодокерованого генератора 3 синусоїдального сигналу. Фактично кодокерований генератор 3 синусоїдального сигналу є цифро-аналоговим перетворювачем, на вхід якого з частотою ƒс з пам’яті мікроконтролера 18 надходять коди значень вибірок, наприклад 500, 1000 1800 або 3600 значень, в залежності від способу й точності формування синусоїди. Другим сигналом є амплітудно-фазомодульований сигнал, що формується диференційним індуктивним сенсором 6 механічних коливань. Значення фазового зсуву є функцією приросту амплітуди механічних коливань судини людини, яка залежить від тиску в судині та його зміни за часом. Отримані значення перетворюються у коди чисел і візуалізуються у вигляді кривої швидкості зміни тиску у судинах на лівій та/чи на правій сторонах тіла людини. 7 UA 106828 C2 5 10 15 20 25 30 Вимірювання можна здійснювати як одним диференційним індуктивним сенсором механічних коливань, так й двома, причому як на судинах, що розташовані на різних сторонах тіла людини, так й на судині, що розташована на одній стороні тіла. В останньому випадку встановлюється й враховується нормована відстані між обома диференційними індуктивними сенсорами механічних коливань. Опорний синусоїдальний сигнал для обох сенсорів формується кодокерованим генераторам 3 синусоїдального сигналу. Тому отримані результати вимірювань можуть з високою точністю порівнюватися між собою. Фактично диференційний індуктивний сенсора механічних коливань 6 та трансформатор 4, що виконаний ідентично до сенсора, але має додаткову вторинну котушку індуктивності з виводами «5» і «6», створюють індуктивний міст (рис. 1). Баланс цього моста здійснюється за допомогою змінного резистора 7. Завдяки цього вирівнюють значення активних опорів моста при його настройці. Вихідний різницевий сигнал формується у вторинній котушки індуктивності трансформатора 4 (див. вивід «5» на фіг. 1). Встановлення балансу здійснюється до моменту отримання мінімального фазового зсуву між порівнювальними за фазами сигналами на етапі калібрування вимірювача чи повірки. Початкове положення мембрани, від якого також залежить початковий фазовий зсув між синусоїдальними коливаннями (при відключених сенсорах відсутня дія пульсової хвилі на них) регулюється та стабілізується за допомогою блока 10 стабілізації початкового положення мембрани 5. Останній управляється по команді з мікроконтролера 18 шляхом подачі на нього напруги, що формується за допомогою вбудованого цифро-аналогового перетворювача за результатами порівняння кодів значень отриманого начального фазового зсуву з нульовим або наперед заданим ненульовим (але близьким до нього) значенням. При вимірюваннях стетоскоп 9 (при використанні двох перетворювачів механічних коливань використовуються два ідентичні стетоскопи) накладається на область пульсації (аорти, крупної артерії тощо) судини людини. Механічні коливання судини з досліджуваної області пульсації тієї чи іншої артерії передаються по повітроводу 8 на мембрану 5 диференційного індуктивного сенсора 6 механічних коливань. Остання починає коливатися синхронно з механічними коливаннями стінки судини за рахунок дії тиску крові. В результаті на виході диференціального індуктивного сенсора 6 механічних коливань (першого чи другого) судин людини з'явиться напруга (див. Аристов Е.В., Хузин Р.А. Исследование индуктивных датчиков. Режим доступу: http://pstu.ru/files/file/Kaf _eagpZ3.pdf), яка пропорційна швидкості зміни коливань стінки судини, тобто ux Rн i1t i2 t Rн r2 r1 j0 L 2 lп1 t L1 lп1 t ,(1) j0 L1lп1t r1 Rн j0 L 2 lп1t r2 Rн де R н - опір навантаження; i1t ) і i2 t - перший та другий вихідні струми диференційного індуктивного сенсора механічних коливань; L 1 і r1 - індуктивність та опір першої котушки індуктивності (виводи 1 - 2) диференційного індуктивного сенсора механічних коливань 6; L 2 і r2 - індуктивність та опір другої котушки індуктивності (виводи 3-4) диференційного індуктивного сенсора механічних коливань 6; lп1 t - функція переміщення стінок судини, яка пропорційна тиску крові на стінку судини у досліджуваній локальній області (точці) пульсації механічних коливань, що діють на сенсор ( lп1t Sлпрп1t , де Sлп - крутість перетворення тиску у переміщення); 0 2ƒ0 - кругова частота вихідного сигналу кодокерованого генератора 3 синусоїдального сигналу u0 t Um sin 0 t 0 , що живить диференціальний індуктивний сенсор 6 механічних коливань судин людини, яка пропорційна різниці струмів через котушки індуктивностей диференційного індуктивного сенсора 6 механічних коливань. З урахуванням залежності функції переміщення від тиску, можна записати, вихідна напруга залужить від швидкості зміни тиску крові на стінку судини протягом дії пульсової хвилі, тобто U sin0 t 0 Rн r2 r1 j0 L 2 Sлпрп1t L1Sлпрп1t , (2) u x pп1 t m j0 L1Sлпрп1t r1 Rн j0 L 2 Sлпрп1t r2 Rн де L1Sлпрп1t - функція зміни індуктивності першої котушки індуктивності від зміни тиску; L 2 S лпрп1 t - функція зміни індуктивності другої котушки індуктивності від зміни тиску. Про швидкість зміни тиску свідчить різниця (приріст) L 2 Sлпрп1t L1Sлпрп1 t Індуктивності L1 L0 / 1 l1 / l0 і L 2 L0 / 1 l1 / l0 першої та другої котушок диференціального індуктивного сенсора 6 механічних коливань залежать від початкового Um sin0 t 0 35 40 45 50 8 UA 106828 C2 положення l0 мембрани та її приросту Δl1 l1t lп1t Sлпрп1 t , який, в свою чергу, залежить від приросту тиску. При малих переміщеннях має місце лінійна залежність зміни індуктивності від тиску. У цьому випадку можна записати l1t Sлпрп1 , де Sлп - крутість перетворення 5 приросту тиску у приріст переміщення мембрани 5, рп1 - приріст тиску, a L1 L0 / 1 S' лп рп1 , L1 L0 / 1 S' лп рп1 , причому S' лп S лп / l0 . Тоді u x pп1 t 10 15 20 25 Um sin0 t 0 Rн r2 r1 j0L0 1/ 1 S' лп рп1 1/ 1 S' лп рп1 . (3) j0L0 1/ 1 S' лп рп1 r1 Rн j0L0 1/ 1 S' лп рп1 r2 Rн Слід зауважити, що рівняння величин (1) і (2) написані за умовою, що практично значення активних опорів r1 і r2 першої та другої котушок диференційного індуктивного сенсора механічних коливань 6 не рівні між собою. Завдяки змінному резистору 7 досягається їх вирівнювання. У цьому випадку напруга (1), що пропорційна приросту швидкості тиску у часі, прийме вид: Rнk 2L 0 u x pп1 t S' лп рп1 t Um Umx cos0 t 0 ' x t 0L 0 2 r1 Rн 2 L Umx cos 0 t 0 k 2arctgS' лп рп1 t 0 0 , (4) r1 Rн де 0 - апріорі встановлене початкове значення мінімального фазового зсуву між синусоїдальними сигналами. З рівняння величин (4) видно, що вихідний сигнал диференційного індуктивного сенсора механічних коливань 6 представляє собою амплітудно-фазомодульований сигнал. Амплітуда вихідного сигналу Rнk 2L 0 , (5) Umx S' лп рп1 t Um 0L 0 2 r1 Rн 2 і фаза L x k 2arctgS' лп рп1 t 0 0 , (6) r1 Rн k2 де k 2 2 , пропорційні швидкості зміни тиску крові на стінки судини у часі. Наявність 90-градусного фазового зсуву (6) у сигналі (4) свідчить, що вихідний сигнал сенсора є похідною від вхідного опорного сигналу і залежить від швидкості зміни тиску у судини. При малих значеннях фазового зсуву, що має місце при малих значеннях Δl, 0L 0 ' x t k 2arctg рп1 t S' лп k р t , (7) r1 Rн 0 п1 0L 0 - коефіцієнт, що залежить від крутості перетворення S' лп та від r1 Rн відношення індуктивного опору диференційного індуктивного сенсора механічних коливань до його активного опору і має постійне значення для конкретного сенсора. Тому можна вважати, що фазовий зсув (7) пропорційний швидкості зміни тиску у судині людини, тобто ' x t k 0 рп1t . Для забезпечення вимірювання фазового зсуву вихідні сигнали u0 t Um sin0 t 0 та ux t Umx cos0 t 0 ' x t з виходів кодокерованого генератора 3 синусоїдального сигналу та вторинної котушки індуктивності трансформатора 4 надходять, відповідно, на узгоджуючий підсилювач 13 і підсилювач струму 11, де підсилюються до заданого рівня. Оскільки зсунутий по фазі сигнал отримується зашумленим і амплітудно-модульованим, то його додатково пропускають через шумозаглушуючий підсилювач-перетворювач «напруга-струм-напруга» 14. Зазначені підсилення сигналів необхідно для високоточного визначення моментів часу переходу їх через нульове значення. Це здійснюється за допомогою компараторів напруги 15 і 16, на які подаються опорний та зсунутий по фазі сигнали з парафазних виходів узгоджуючого підсилювача 13 та шумозаглушуючого підсилювача-перетворювача «напруга-струм-напруга» 14. Наявність парафазних виходів забезпечує більшу точність визначення моментів переходу сигналів через нульовий рівень, ніж при використанні тільки одного виходу і підключенні другого входу компаратору до земляної шини. де k 0 S' лп 30 35 40 45 9 UA 106828 C2 5 10 На виходах компараторів напруги 15 і 16 формуються рознесені у часі імпульси заданої вольт-секундної площі, які характеризують часовий зсув між сигналами і відповідають вимогам щодо параметрів вхідних сигналів мікроконтролера 18. Цей зсув перетворюється у код числа, що характеризує поточний фазовий зсув зазначених вище сигналів. Одночасно визначається та фіксується значення частоти ƒ0 опорного сигналу у оперативній пам'яті мікроконтролера 18. Як відомо, фазовий зсув визначається за рівнянням вимірювань xi k t i / T0 k t i ƒ 0 , (8) де k - коефіцієнт пропорційності; k 360 ; T0 - період опорного синусоїдального сигналу T0 1/ ƒ0 , або за рівняння числових значень N xi 360 t i / T0 360 Nt Nƒ . (9) i 15 0 Для підвищення точності з отриманого фазового зсуву виключають начальне фазового зсуву xн k t н / T0 k t н ƒ 0 між синусоїдальними сигналами при відсутності дії механічних коливань. Тоді, остаточно, інформативний фазовий зсув визначиться як різниця початкового N0 360 t 0 / T0 360 Nt Nƒ (10) 0 0 та виміряного (9) фазових зсувів, тобто N' xi xi 0 360 t i t 0 / T0 360 Nt i Nt 0 Nƒ 0 . (11) 20 25 30 35 40 45 50 55 Слід зазначити, що результати вимірювання фазового зсуву визначають та запам'ятовують у пам'яті запам'ятовуючого пристрою 25 кожної милісекунди. Це забезпечує визначення швидкості зміни тиску у судині людини протягом всієї дії пульсової хвилі. Всього за час дії однієї пульсової хвилі отримують від 1000 до 3600 значень змін тиску у судині. За отриманими за час дії пульсової хвилі результатами (11) визначають швидкість зміни тиску на стінки судини у реальному часі протягом, наприклад, дії одного дихального циклу. На екрані рідинно-кришталевого індикатора 20 візуалізується крива зміни тиску у судині у декартовій системі координат протягом одного чи декількох періодів пульсової хвилі (див. фіг. 2) з показом міток часу. За заданою програмою здійснюється обчислення основних параметрів та показників механічних властивостей досліджуваної (однієї чи двох) судини у одній чи у двох нормованих за відстанню точках, здійснюється їх Фур'є-аналіз тощо. Результати обчислення параметрів також візуалізуються на екрані рідинно-кришталевого індикатора 20. Одночасно вони записуються у запам'ятовуючий пристрій 25 для накопичення та передачі отриманої інформації через формувач 22 сигналу передачі даних на персональний комп’ютер для подальшого аналізу, документування та зберігання у базі даних пацієнта. При необхідності отримані результати друкуються на паперовому носії за допомогою цифрового друкуючого пристрою 24, що підключений до мікроконтролера 18 через мультиплексор 23. Як правило, записують криву швидкості зміни тиску у досліджуваній судини людини за 1-2 періоду пульсової хвилі. Цифровий вимірювач механічних властивостей судинної системи людини додатково має другий перетворювач механічних коливань 2, який включений, як зазначено вище. Його робота аналогічна першому перетворювачу механічних коливань. Це забезпечує вимірювання та порівняння механічних властивостей судин людини з правої та лівої частин тіла одночасно або порівняння швидкості зміни тиску у судини у двох точках, що рознесені одна від іншої на наперед задане (нормоване) значення та час затримки, розширює функціональні можливості цифрового вимірювача і дозволяє виявити, наприклад, місцезнаходження тромбу у досліджуваних судинах. Завдяки використанню кодокерованого генератора синусоїдального сигналу 3, що є єдиним для обох перетворювачів механічних коливань, досягається висока точність порівняння отриманих результатів для судин лівої та правої частин тіла людини. Для синхронного отримання пульсової хвилю та тій же ділянці судини людини, в цифровий вимірювач введено сенсор пульсу, який конструктивно об'єднаний з стетоскопом 9 і воздуховодом 8. Світлодіод 30, що генерує потік оптичного випромінювання заданої довжини хвилі і потужності, включається за допомогою вмикача 33 тільки при наявності контакту сенсорів з поверхнею об’єкта дослідження 36. Завдяки поглинання крові потоком оптичного випромінювання, який формується світлодіодом 30, на виході фотоприймача 29 сенсора пульсу формується електричний сигнал пульсової хвилі, якій підсилюється за допомогою підсилювача 34. З виходу підсилювача 34 цей сигнал надходить через аналоговий вхід «а1» порту Р0 мікроконтролера 18 і через вбудований комутатор каналів на вбудований аналого-цифровий перетворювач. Отримані коди вибірок пульсової хвилі запам'ятовуються у запам'ятовуючому 10 UA 106828 C2 5 10 15 20 25 30 35 40 45 50 55 пристрої 25 і використовуються для формування зображення пульсової хвилі на екрані рідиннокришталевого індикатора 20 з мітками поточного часу та для обчислення її параметрів. Одночасно парафазні сигнали з прямого та інверсного виходів підсилювача 34 надходять на входи компаратора напруги 35. За допомогою останнього формуються імпульси, що відповідають початок появлення пульсової хвилі. За цими імпульсами визначається період повторення пульсової хвилі чи частота та їх зміни (девіація) за часом і під впливом різних артефактів. Особливістю зазначеного технічного рішення є те, що пульсову хвилю отримують оптичним методом також з обох сторін тіла людини і також синхронно з отриманням кривої зміни тиску у судині. Це підвищує якість оцінки стану судини людини. Управління роботою цифрового вимірювача механічних властивостей судинної системи людини здійснюється за допомогою клавіатури 19. Завдяки їй можна вибрати режим роботи «час вимірювань», «вимірювання одним сенсором», «вимірювання двома сенсорами», «установка нульового фазового зсуву», «калібрування», «виділення пограничних значень параметрів», «Фур'є-аналіз» функцій зміни тиску на судини людини, «статистична обробка даних», «друк діагностичної карти», «запам'ятовування результатів вимірювання у запам'ятовуючому пристрої», «передача даних у персональний комп'ютер», «контроль напруг живлення» тощо. Метрологічний самоконтроль цифрового вимірювача механічних властивостей судинної системи людини та калібрування вимірювального каналу цифрового вимірювача механічних властивостей судинної системи людини здійснюється наступним чином. Спочатку встановлюють нульовий фазовий зсув між синусоїдальними сигналами, що формуються на виходах «а1» і «б» кодокеровеного генератора 3 і першого підсилювача струму 11 (див. фіг. 1) і які оцифровуються у мікроконверторі 18 та відображаються на екрані рідинно-кришталевого індикатора 20. Для встановлення нульового фазового зсуву виконують дві операції. Перша полягає у ручному встановленні змінного резистора 7 у положення, при якому має місце мінімальний фазовий зсув між синусоїдальними сигналами в результаті встановлення балансу індуктивного мосту, що утворюють, як вже зазначалося вище, диференціальний індуктивний сенсор механічних коливань 5 та трансформатор 4. Друга полягає у точному автоматичному, - за командою з мікроконтролера 18, встановленні мембрани 5 в положення, при якому досягається точне мінімальне значення фазового зсуву. Це забезпечується шляхом подачі на стабілізатор 10 початкового положення мембрани 5 напруги управління з виходу підсилювача струму 12. Останній підключений до виходу вбудованого у мікроконтролер 18 цифро-аналогового перетворювача, на цифрові входи якого за заданим законом поступають коди чисел, які перетворюються у відповідну напругу управління і здійснюють операцію мінімізації фазового зсуву. Чутливість вимірювального каналу з диференціальним індуктивним сенсором 6 механічних коливань залежить, згідно з (7), від стабільності коефіцієнта k 0 k 0 S' лп 0L0 / r1 Rн у часі. Від його значення залежить і остаточний результат вимірювання фазового зсуву синусоїдальних сигналів. Якщо проаналізувати фактори, що обумовлюють нестабільність вимірювального каналу, то можна встановити, що на чутливість вимірювального каналу впливають: нестабільності крутості перетворення S' лп , кругової частоти 0 , індуктивності L 0 (а значить від положення мембрани 5 і її жорсткості) та резисторів r1 і R н . Для компенсації нестабільності чутливості вимірювального каналу запропоновано періодично, чи у задані інтервали часу (один раз за 15 хвилин, за годину тощо) вимірювати та змінювати частоту опорного синусоїдального сигналу кодокерованого генератора 3 при відсутності об'єкта дослідження. Це може бути здійснено шляхом зміни частоти тактових імпульсів, за допомогою яких здійснюється перетворення кодів вибірок, що записані у пам'ять мікроконтролера 18, у синусоїду. Згідно з (10), фазовий зсув залежить від значення Nƒ частоти опорного 0 синусоїдального сигналу, яка встановлюється шляхом вибору та регулювання частоти зчитування кодокерованого генератора імпульсів 17. Довготермінова нестабільність фазового зсуву залежать від довготермінової нестабільності значення частоти опорного синусоїдального сигналу. Критерієм його зміни вибрано відхилення начального значення фазового зсуву від апріорі встановленого номінального значення 0 , яке було записане у пам'ять мікроконтролера 18 ще на етапі вводу його в експлуатацію. Досягнення одного й того ж апріорі заданого значення початкового фазового зсуву 0 між синусоїдальними сигналами при калібруванні чи метрологічному самоконтролю цифрового вимірювача механічних властивостей судинної системи людини здійснюється зазначеним вище 11 UA 106828 C2 5 10 15 20 25 30 35 40 45 50 55 способом, тобто зміною частоти опорного синусоїдального сигналу до моменту забезпечення встановленого номінального значення начального фазового зсуву між порівнювальними сигналами. На фіг. 3 наведені графіки швидкості зміни тиску на судини людини (верхній графік) та графік пульсової хвилі (нижній графік), що отримана шляхом інтегрування швидкості зміни тиску (виміряної похідної) чи пульсової хвилі, що отримана за допомогою сенсора пульсу. При необхідності можна відобразити дві пульсові хвилі (на рисунку не показано). За програмою з мікроконтролера формується діагностична картка пацієнта, на якій відображаються отримані криві з вказівкою значень діагностичних параметрів та встановленого діагнозу. На графіках, як правило, відмічаються основні характеристичні точки, координати яких визначені за результатами вимірювань швидкості зміни тиску на судини людини чи його приросту, даними поточного часу тощо. Зокрема визначають: значення швидкості зміни тиску у досліджуваній судині людини протягом дії пульсової хвилі, різниці амплітуд у порівнювальних інформативних точках графіку, їх абсолютні та відносні значення, значення часу проходження пульсової хвилі через зазначену ділянку (точку) судини, значення поточного часу, різниця значень часу у характерних точках графіку тощо. З наведених графіків видно, що параметри характеристичних точок кривих відрізняються між собою навіть від однієї пульсової хвилі до другої (точки 1-1',..., 7-7' та 10-10'). Так, наприклад, при однаковому значенні швидкості зміни тиску у судини (при одній потужності викиду крові серцем) амплітуди сусідніх пульсових хвиль (точки 2-2') відрізняються між собою. Це служить додатковою інформацією про стан серцевосудинної системи людини. За формою графіку, що відображає залежність тиску на стінки судини людини від часу можна встановлювати тип пульсової хвилі при різних захворюваннях тощо. Наведені графіки підтверджують високу інформативність кривої швидкості зміни тиску разом з кривою пульсу та надають більш широкі можливості щодо дослідження механічних властивостей судин людини і встановленню медичного діагнозу щодо стану серцево-судинної системи людини, ніж відомі методи та пристрої. Підвищення точності вимірювання досягається за рахунок використання не амплітудного, а фазового, більш завадостійкого, перетворення приросту тиску у судини людини у коди чисел. Для цього використано принцип модуляції магнітного потоку (шляхом зміни магнітного опору) у диференціальному індуктивному сенсорі механічних коливань з одночасною амплітуднофазовою модуляцією опорного синусоїдального сигналу і наступним формуванням зсунутого за фазою електричного сигналу та вимірюванням отриманого фазового зсуву. При цьому фазовий зсув вимірюється кожну мілісекунду, що дозволяє отримати інформацію про приріст тиску у судини людини за часом. Ефективну фільтрацію шумів забезпечує додатково введений в цифровий вимірювач шумо-заглушуючий підсилювач-перетворювач «напруга-струм-напруга», виконаний у вигляді двох, розміщених у одному феритовому горшку, трансформаторів: напруги у струм та струму у напругу. Підвищена точність та чутливість формування часових інтервалів забезпечена шляхом подачі на компаратори напруги двох парафазних сигналів. Високу точність перетворення механічних коливань мембрани забезпечує таке підключення узгоджуючого трансформатора 5 до диференціального індуктивного сенсора механічних коливань, при якому утворюється індуктивний міст. Можливість встановлення балансу цього мосту забезпечує отримання мінімального, близького до нуля, значення початкового фазового зсуву між порівнювальними по фазі електричними сигналами. Необхідний рівень зсунутого по фазі (інформативного) сигналу забезпечується введенням підсилювача струму 11. Ще однією перевагою запропонованого технічного рішення є те, що в нього введено стабілізатор 10 положення мембрани 5. Він управляється за командою з мікроконтролера 18 шляхом обчислення та встановлення відповідної напруги на виході вбудованого цифро-аналогового перетворювача та її підсилення до необхідного рівня за допомогою другого введеного підсилювача струму 12. Ще однією перевагою запропонованого цифрового вимірювача механічних властивостей судини людини є можливість регулювання зміни чутливості вимірювального каналу за часом, що має місце при дії зовнішніх дестабілізуючих факторів. Це забезпечується шляхом зміни частоти опорного електричного сигналу на мале значення. Таким чином, запропоноване технічне рішення цифрового вимірювача механічних властивостей судинної системи людини забезпечує вирішення поставленої технічної задачі. ФОРМУЛА ВИНАХОДУ 60 1. Цифровий вимірювач механічних властивостей судинної системи людини, що включає в собі послідовно з'єднані між собою кодокерований генератор синусоїдальних сигналів, узгоджуючий 12 UA 106828 C2 5 10 15 20 25 30 35 40 45 50 55 60 підсилювач з парафазним виходом та перший компаратор напруги, перетворювач механічних коливань, що складається з конструктивно об'єднаних між собою диференціального індуктивного сенсора механічних коливань судин людини, металевої мембрани з магнітом'якого матеріалу та трансформатора, перший та третій виводи первинних котушок індуктивностей якого з'єднані з третім й першим виводами котушок індуктивностей диференціального індуктивного сенсора механічних коливань, другий та четвертий виводи котушок індуктивностей якого підключені до відповідних виводів змінного резистора, середній вивід якого з'єднаний з земляною шиною, мікроконтролер з вбудованим в нього комутатором каналів, що підключений до входу вбудованого аналого-цифрового перетворювача, двома цифро-аналоговими перетворювачами та годинником реального часу, клавіатуру, запам'ятовуючий пристрій, мультиплексор, формувач сигналу передачі даних на комп'ютер, цифровий друкуючий пристрій, загальну шину, рідинно-кришталевий індикатор та блок сигналізації, причому рідиннокришталевий індикатор, блок сигналізації та вхід кодокерованого генератора синусоїдальних сигналів через загальну шину з'єднані з портом Р3 мікроконтролера, порт Р1 якого підключений до цифрових входів-виходів клавіатури, послідовний порт SPI з'єднаний зі входом запам'ятовуючого пристрою, вихід і вхід порту ПП прийому-передачі даних підключені, відповідно, до першого входу і першого виходу мультиплексора, вхід "г" керування якого з'єднаний з виходом "г" порту Р2 мікроконтролера, другий та третій виходи мультиплексора з'єднані, відповідно, з першими входами цифрового друкуючого пристрою та формувача сигналу управління, третій та другий входи підключені, відповідно, до других виходів цифрового друкуючого пристрою та формувача сигналу передачі даних на комп'ютер, вхід і вихід якого призначені для зв'язку з персональним комп'ютером, старші розряди аналогових входів порту Р0 мікроконтролера підключені, відповідно, до джерел живлення Uп1, Uп2 і Uп3 аналогових та цифрових функціональних блоків цифрового вимірювача, який відрізняється тим, що у перетворювач механічних коливань додатково введено перший та другий підсилювачі струму, послідовно з'єднані між собою і з першим підсилювачем струму шумоподавляючий підсилювачперетворювач "напруга-струм-напруга" та другий компаратор напруги, виходи "д1" і "д2" першого та другого компараторів напруги підключені до входів "д1" і "д2" порту Р4 мікроконтролера, входи "а1" і "б" шумозаглушуючого підсилювача-перетворювача "напругаструм-напруга" і узгоджуючого підсилювача з'єднані, відповідно, з аналоговими входами "а1" і "б" порту Р0 мікроконтролера, що є входами вбудованого в нього комутатора каналів, який підключений до входу вбудованого аналого-цифрового перетворювача, вхід першого підсилювача струму підключений до першого виводу вторинної котушки індуктивності трансформатора, другий вивід якої з'єднаний з шиною заземлення , вхід узгоджуючого підсилювача підключений до об'єднаних між собою виходу кодокерованого генератора синусоїдальних сигналів і другого та четвертого виводів первинних котушок індуктивностей трансформатора, при цьому аналоговий вихід DA1 мікроконтролера, що є виходом першого вбудованого цифро-аналогового перетворювача, через вхід "і1" другого підсилювача струму підключений до входу блока стабілізації початкового положення мембрани, вихід якого механічно з'єднаний з мембраною, яка підключена через повітровід зі стетоскопом, на який діють механічні пульсові коливання стінок кровоносної судини судинної системи людини. 2. Цифровий вимірювач механічних властивостей судинної системи людини за п. 1, який відрізняється тим, що в нього додатково введений другий перетворювач механічних коливань, вхід якого з'єднаний з виходом кодокерованого генератора синусоїдального сигналу, аналоговий вихід "а2" зсунутого по фазі сигналу підключений до аналогового входу "а2" порту Р0 мікроконтролера, вхід "д2" порту Р4 якого з'єднаний з виходом "д2" компаратора напруги другого перетворювача механічних коливань, чий аналоговий вхід "і2" установки мінімального фазового зсуву сигналів підключений до виходу "і2" порту DA2 мікроконтролера, що є виходом другого вбудованого цифро-аналогового перетворювача. 3. Цифровий вимірювач механічних властивостей судинної системи людини за п. 1, який відрізняється тим, що в нього додатково введений кодокерований генератор імпульсів, вихід "з" якого підключений до входу "з" порту Р4 мікроконтролера, з портом Р3 якого через загальну шину з'єднані цифрові входи кодокерованого генератора імпульсів. 4. Цифровий вимірювач механічних властивостей судинної системи людини за п. 1, який відрізняється тим, що в кожний перетворювач механічних коливань додатково введено послідовно включені підсилювач і компаратор напруги, паралельно з'єднані резистор і конденсатор, вмикач з пружиною та сенсор пульсу, що жорстко з'єднаний з стетоскопом і містить корпус, який оточує світлодіод і фотоприймач, вихід "м" якого підключений до входу "м" підсилювача, виходи "ж1" і "ж2" компараторів напруги підключені до входів "ж1" і "ж2" порту Р4 мікроконтролера, з портом Р3 якого з'єднані через загальну шину цифрові входи-виходи 13 UA 106828 C2 5 додатково введеного кодокерованого джерела живлення, його виходи "л1" і "л2" підключені до входів "л1" і "л2" перетворювачів механічних коливань, які є входами вмикачів, виходи яких з'єднані з входами живлення світлодіодів, до яких підключені перші виводи паралельно з'єднаних резистора та конденсатора, другі виводи яких підключені до земляної шини, як й другий вивід фотоприймача, при цьому прямі виходи "в1" і "в2" аналогового сигналу кожного підсилювача з'єднані з входами "в1" і "в2" порту Р0 мікроконтролера, до входів "ж1" і "ж2" порту Р4 якого підключені виходи "ж1" і "ж2" компараторів напруг, а кнопка вмикача, як й поверхня стетоскопа, з'єднана з поверхнею досліджуваного об'єкта. 14 UA 106828 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 15
ДивитисяДодаткова інформація
Автори англійськоюRomanov Volodymyr Oleksandrovych, Kondratov Vladyslav Tymofiiovych, Chernetskyi Viktor Vasyliiovych, Braiko Yurii Oleksiiovych, Imamutdinova Rosa Helmutdinivna
Автори російськоюРоманов Владимир Александрович, Кондратов Владислав Тимофеевич, Чернецкий Виктор Васильевич, Брайко Юрий Алексеевич, Имамутдинова Роза Гельмутдиновна
МПК / Мітки
МПК: A61B 5/024, A61B 1/055, G01B 7/00, G01B 7/14, G01D 5/00, A61B 1/00
Мітки: властивостей, людини, судинної, вимірювач, цифровий, механічних, системі
Код посилання
<a href="https://ua.patents.su/17-106828-cifrovijj-vimiryuvach-mekhanichnikh-vlastivostejj-sudinno-sistemi-lyudini.html" target="_blank" rel="follow" title="База патентів України">Цифровий вимірювач механічних властивостей судинної системи людини</a>
Цифровий вимірювач ємності
Номер патенту: 43806
Опубліковано: 25.08.2009
Автори: Вострухін Олександр Віталійович, Шарапов Валерій Михайлович, Мінаєв Ігор Георгійович, Базіло Костянтин Вікторович
МПК: G01R 27/26
Мітки: вимірювач, цифровий, ємності
Формула / Реферат:
Цифровий вимірювач ємності, що містить мікроконтролер, цифровий індикатор, перший та другий генератори, часозадавальні ланцюги яких містять відповідно конденсаторний датчик і перший часозадавальний резистор, конденсатор зразкової ємності та другий часозадавальний резистор, причому перший та другий часозадавальні резистори, опори яких дорівнюють R1, першими виводами підключені до перших обкладок відповідно конденсаторного датчика та датчика...
Цифровий вимірювач параметрів процесу мікроциркуляції крові в пальцях кінцівок людини та параметрів кривої мікрогемодинаміки
Номер патенту: 104803
Опубліковано: 11.03.2014
Автор: Кондратов Владислав Тимофійович
МПК: G01N 21/17, G01N 21/39, A61B 5/026
Мітки: вимірювач, крові, параметрів, кінцівок, кривої, процесу, пальцях, мікроциркуляції, цифровий, людини, мікрогемодинаміки
Формула / Реферат:
1. Цифровий вимірювач параметрів процесу мікроциркуляції крові в пальцях кінцівок людини та параметрів кривої мікрогемодинаміки, що включає: мікрокомпресор, компаратор напруги, електромагнітний клапан стравлення тиску повітря, мікроконвертор, клавіатуру, оперативний запам'ятовуючий пристрій, мультиплексор, формувач сигналу керування, цифровий друкуючий пристрій, загальну шину, рідкокристалічний індикатор, годинник реального часу і подільник...
Спосіб діагностики функціонального стану серцево-судинної системи людини
Номер патенту: 86177
Опубліковано: 25.12.2013
Автори: Нікітчук Тетяна Миколаївна, Манойлов Вячеслав Пилипович, Мартинчук Петро Петрович
МПК: A61B 6/02
Мітки: функціонального, системі, серцево-судинної, діагностики, людини, спосіб, стану
Формула / Реферат:
Спосіб діагностики функціонального стану серцево-судинної системи людини, який включає реєстрацію пульсового сигналу променевої артерії людини, який відрізняється тим, що попередньо створюють базу фазових портретів змодельованих пульсограм при різних патологіях серцево-судинної системи та у нормі, далі після реєстрації пульсового сигналу променевої артерії людини створюють фазовий портрет цього сигналу шляхом визначення його залежності від...
Спосіб інтегральної оцінки поточного функціонального стану серцево-судинної системи людини
Номер патенту: 16024
Опубліковано: 17.07.2006
Автор: Файнзільберг Леонід Соломонович
МПК: A61B 5/024
Мітки: оцінки, людини, стану, серцево-судинної, поточного, системі, функціонального, спосіб, інтегральної
Формула / Реферат:
Спосіб інтегральної оцінки поточного функціонального стану серцево-судинної системи людини полягає у тому, що вимірюють сигнал, який несе інформацію про зміну в часі електричної активності серця, визначають поточну швидкість зміни цього сигналу та спостерігають у фазовому просторі координат траєкторію, що відображає залежність поточної швидкості зміни сигналу, що вимірюють відносно поточного рівня цього сигналу під час спостереження, який...
Спосіб визначення придатності судинної системи людини до дистанційного ендоваскулярного протезування аневризм аорти
Номер патенту: 40386
Опубліковано: 10.04.2009
Автори: Володось Микола Леонтіїйович, Калашнікова Юлія Валентинівна, Аксенко Олександр Олександрович
МПК: A61B 5/0205, A61M 25/01, G01N 33/48
Мітки: людини, придатності, ендоваскулярного, аорти, дистанційного, протезування, аневризм, системі, судинної, спосіб, визначення
Формула / Реферат:
Спосіб визначення придатності судинної системи людини до дистанційного ендоваскулярного протезування аневризм аорти шляхом визначення співвідношення внутрішнього діаметра однієї із здухвинних артерій, через яку доставляється ендопротез до аорти, і зовнішнього діаметра катетера з ендопротезом, який відрізняється тим, що додатково досліджують траєкторію звивистості здухвинної артерії, а також кути вигинів її, і при куті вигину між суміжними...
Попередній патент: Спосіб вібраційного грохочення матеріалів
Наступний патент: Спосіб діагностики поперекового спінального стенозу з синдромом нейрогенної переміжної кульгавості
Випадковий патент: Спечений матеріал для електричних контактів