Ідентифікація базованих на часі ефемерид у допоміжних даних і повідомленнях з вимогою допоміжних даних
Формула / Реферат
1. Спосіб супутникової навігації, що призначена для використання мобільною станцією або сервером навігаційної підтримки в процесі одержання навігаційної підтримки з сервера навігаційної підтримки безпровідної мережі, за яким:
- забезпечують у пристрої, який розміщено в мобільній станції і в сервері навігаційної підтримки, значення показника часу для навігаційного сигналу як ідентифікатора ефемеридної інформації, включеної у навігаційний сигнал, базуючись на проміжку часу між ефемеридною інформацією і кінцем тижня до цієї ефемеридної інформації, причому навігаційним сигналом є сигнал L2C, L5 або L1C GPS, або відповідний сигнал глобальної навігаційної супутникової системи іншого типу,
- використовують ідентифікатор як основу для визначення, чи є ефемеридна інформація більш недавньою інформацією порівняно з іншою ефемеридною інформацією.
2. Спосіб за п. 1, в якому навігаційний сигнал не містить показник часу, і забезпечення показника часу включає отримання значення цього показника, яке базується на значенні часу прийому навігаційного сигналу і значенні часу початку тижня.
3. Спосіб за п. 1, в якому прийнятий навігаційний сигнал містить показник часу, і забезпечення значення показника часу включає отримання показника часу з прийнятого навігаційного сигналу.
4. Спосіб за п. 1, який призначено для використання мобільною станцією і який додатково включає формування повідомлення з вимогою навігаційних допоміжних даних, що містить значення часу тижня як показника ефемеридної інформації, отриманої з навігаційного сигналу.
5. Спосіб за п. 1, який призначено для використання сервером навігаційної підтримки і який додатково включає визначення, чи надавати більш недавню ефемеридну інформацію у відповідь на вимогу навігаційних допоміжних даних від мобільної станції, базуючись на порівнянні показника часу з показником часу, включеним у вимогу навігаційних допоміжних даних.
6. Спосіб за п. 1, в якому показником часу є широкомовно переданий показник часу тижня, репрезентований як 8-бітовий інформаційний елемент.
7. Спосіб за п. 1, в якому показником часу є широкомовно переданий показник часу тижня і у випадку, коли цей широкомовно переданий показник часу тижня включено у вимогу навігаційних допоміжних даних, його репрезентовано щонайменш вісьмома значущими бітами наданих даних інформаційного елемента, звичайно включеного у повідомлення з навігаційними допоміжними даними.
8. Спосіб за п. 1, в якому навігаційне повідомлення з допоміжними даними є повідомленням глобальної навігаційної супутникової системи або диференційним повідомленням глобальної навігаційної супутникової системи.
9. Пристрій для супутникової навігації, що призначена для використання мобільною станцією або сервером навігаційної підтримки в процесі одержання навігаційної підтримки з сервера навігаційної підтримки стільникової мережі, причому цей пристрій входить до складу мобільної станції або сервера навігаційної підтримки і має:
- модуль створення ідентифікатора для формування для навігаційного сигналу показника часу як ідентифікатора ефемеридної інформації, включеної у навігаційний сигнал, базуючись на проміжку часу між ефемеридною інформацією і кінцем тижня цієї ефемеридної інформації, причому навігаційним сигналом є сигнал L2C, L5 або L1C GPS, або відповідний сигнал глобальної навігаційної супутникової системи іншого типу, і
- навігаційний допоміжний модуль для використання ідентифікатора як основи для визначення, чи є ця ефемеридна інформація більш недавньою порівняно з іншою ефемеридною інформацією.
10. Пристрій за п. 9, в якому навігаційний сигнал не включає показник часу, а модуль створення ідентифікатора конфігуровано отримувати значення індикатора часу, базуючись на значенні часу прийому навігаційного сигналу і значенні показника часу початку тижня.
11. Пристрій за п. 9, в якому навігаційний сигнал включає показник часу, а модуль створення ідентифікатора конфігуровано отримувати значення індикатора часу з прийнятого навігаційного сигналу.
12. Пристрій за п. 9, який призначено для використання мобільною станцією і в якому навігаційний допоміжний модуль конфігуровано формувати повідомлення з вимогою навігаційних допоміжних даних, яке містить показник часу як показник ефемеридної інформації, отриманої з навігаційного сигналу.
13. Пристрій за п. 9, який призначено для використання сервером навігаційної підтримки і в якому навігаційний допоміжний модуль конфігуровано надавати більш недавню ефемеридну інформацію у відповідь на вимогу навігаційних допоміжних даних від мобільної станції, базуючись на порівнянні показника часу з показником часу, включеним у вимогу навігаційних допоміжних даних.
14. Пристрій за п. 9, який виконаний як спеціалізована мікросхема.
15. Машинозчитуваний носій, який містить комп'ютерний програмний код, що призначений для виконання процесором інструкцій для здійснення способу за пп. 1-8.
Текст
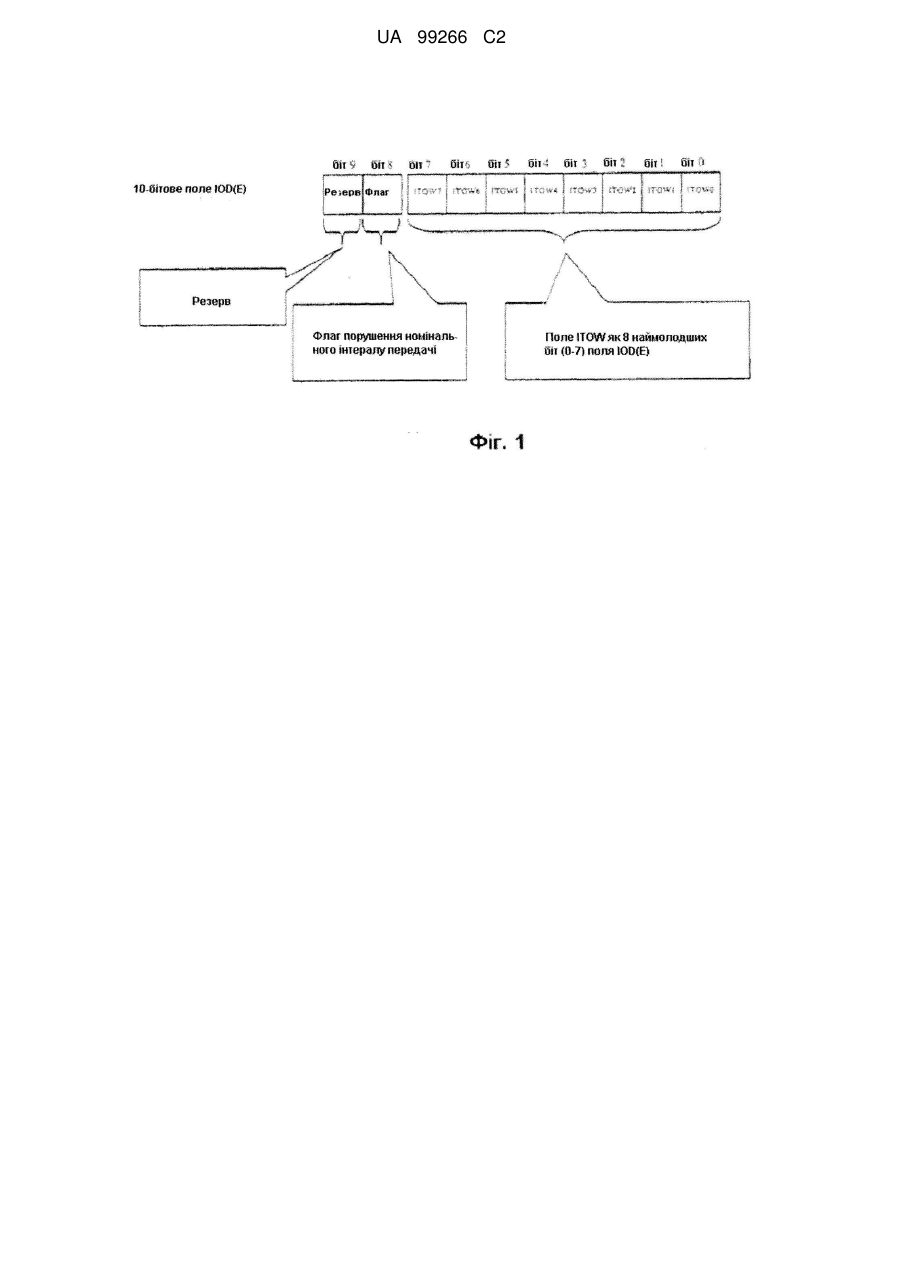
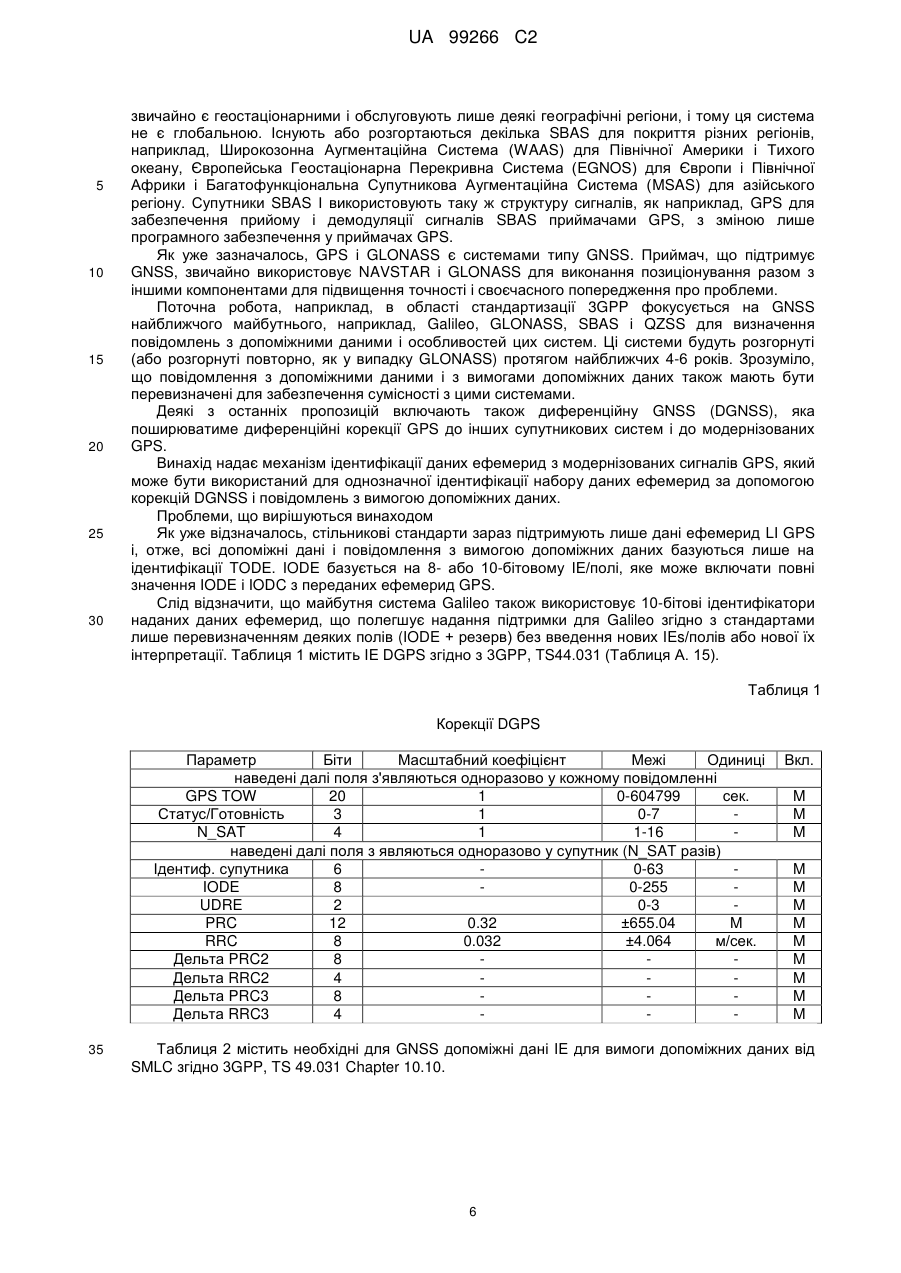
Реферат: Модуль (програмний або ASIC) для використання у Центрі Визначення Положень Мобільних пристроїв (SMLC) або у мобільній станції, що має приймач GPS (або приймач A-GPS) для визначення ІTOW для сигналу CNAV-1. Також запропоновано мобільний пристрій з приймачем GPS (або A-GPS), щоб цей мобільний пристрій міг використовувати ITOW (ITOW від CNAV-2 або обчислений для CNAV-1) для однозначної ідентифікації ефемеридної інформації у повідомленні з вимогою підтримки. Крім того, запропоновано модуль для SMLC, через який SMLC зможе використовувати поля IOD у повідомленнях з допоміжними даними для однозначної ідентифікації відповідної ефемеридної інформації. UA 99266 C2 (12) UA 99266 C2 UA 99266 C2 5 10 15 20 25 30 35 40 45 50 55 60 Пріоритет попередньої заявки на патент США No. 60/856 623 від 3/11/2006. Винахід стосується області навігації з використанням GNSS (наприклад, GPS), зокрема, з використанням підтриманої GNSS (наприклад, підтриманої GPS). У подальшому часто використовується термін "GPS" (Global Positioning System (Глобальна Система Позиціонування)). Залежно від контексту він означає або версію GNSS (Global Navigation Satellite System (Глобальна Навігаційна Супутникова Система)), запропонованої США, тобто, NAVSTAR, яку звичайно називають GPS, або будь-яку іншу GNSS, наприклад, GPS, Galileo, Glonass, SBAS (Space Based Augmantation Sestem (Космічна Аугментаційна Система)), LAAS (Local Area Аугментаційна Система (Локально-зонна Аугментаційна Система)) або QZSS (Quasi-Zenith Satellite System). Термін "A-GPS", використаний тут означає або підтриману GNSS, або лише підтриману GPS. Навігація з використанням A-GPS використовує сервер підтримки для скорочення часу, потрібного дальномірному приймачу (тобто приймачу GPS) для визначення положення. A-GPS є корисною у міських зонах, де користувач часто знаходиться у так званих міських каньйонах, або коли користувач знаходиться під густим листям дерев. A-GPS стає більш поширеною і звичайно пов'язана з Службою, базованою на положенні ((LBS), яка надається у стільникових або інших безпровідних мережах. A-GPS відрізняється від звичайної (тобто не підтриманої) GPS наявністю сервера підтримки у загальній системі забезпечення сигналів GPS. У (звичайних) мережах GPS приймач GPS має зв'язок безпосередньо (приймає сигнали безпосередньо від) з супутників GPS, тобто тут є лише супутники GPS і приймачі GPS. У мережах A-GPS, приймач A-GPS має зв'язок з сервером підтримки, який має зв'язок з (приймає сигнали від) супутниками GPS (приймач A-GPS може також приймати сигнали безпосередньо від супутників GPS). Приймач A-GPS і сервер підтримки розділяють між собою обчислювальні функції, знижуючи обчислювальне навантаження на приймач GPS, але приймач GPS тоді отримує додаткову задачу (порівняно з чистим приймачем GPS) забезпечення стільникового зв'язку з сервером підтримки. У типовій мережі A-GPS приймач A-GPS може запитати від сервера підтримки, розташованого у так званому Центрі Положень Мобільних пристроїв (MLC), останні ефемериди для супутника або корекції ефемерид для більш точного визначення положення приймачем AGPS. Запитуючи допоміжні дані ефемерид, приймач A-GPS має однозначно ідентифікувати версію ефемерид. В існуючих системах ефемериди надаються у так званому Ll-сигналі GPS і повідомлення, що містить ефемериди, включає механізм однозначного посилання на ефемериди. Таким механізмом є інформаційний елемент (IE) IOD-E (Дані ефемерид) у цьому повідомленні. (IE можна назвати "полем" для запису). Існують так звані "модернізовані" сигнали GPS (L2C, L5 і L1C), описані у IS-GPS-200D (Interface Specification-GPS-200D), IS-GPS705 і ISGPS-800. Вони не включають IOD-E. Отже, існує потреба у механізмі, який можна використовувати з модернізованими сигналами GPS для однозначного посилання на ефемериди, що надсилаються модернізованим сигналом GPS. Далі наведено спрощений огляд винаходу для надання базового розуміння деяких аспектів винаходу. Цей огляд не є широким і не призначається ні для визначення ключових або критичних елементів винаходу, ні для визначення об'єму винаходу. Його єдиною метою є представити концепції винаходу у спрощеній формі як вступ до більш детального опису, наведеного далі. Винахід включає мобільну станцію (термінал безпровідного зв'язку) обладнану для прийому стільникових сигналів від стільникової мережі або сигналів від нестільникової безпровідною мережі, наприклад, WLAN (Безпровідна локально-зонна Мережа) або мережі WiMAX (Загальносвітова Взаємодія для Мікрохвильового Доступу) (WiMAX є базованою на стандартах технологією, що забезпечує безпровідний широкосмуговий доступ як альтернативу кабелю і DSL) і має обладнання для прийому дальномірних сигналів навігаційних маяків (супутників) супутникової GPS. Отже, мобільна станція включає стільниковий або інший безпровідний компонент і також компонент GPS (тобто компонент GNSS). Безпровідний компонент має конфігурацію, яка забезпечує зв'язок з Центром Визначення Положень Мобільних пристроїв (SMLC), який є частиною безпровідної мережі (звичайно стільникової), і включає згаданий вище сервер підтримки для забезпечення підтримки компоненту GPS мобільного пристрою. Отже, компонент GPS мобільної станції більш доцільно називати Α-компонентом GPS (точніше, компонентом A-GNSS). Мобільна станція і SMLC згідно з винаходом відрізняються від існуючих тим, що вони мають зв'язок для передачі інформації, яку не передають існуючі пристрої, а саме, інформацію, потрібну для ідентифікації даних ефемерид (тобто наскільки застарілими мони є), і підтримка 1 UA 99266 C2 5 10 15 20 25 30 35 40 45 50 55 для цього надається мобільній станції сервером підтримки. Дані ефемерид можна розглядати як дані, що використовуються для визначення положень супутників GPS, тобто їх орбіт, і можуть бути (фактичними) ефемеридами або просто інформацією про ефемериди, тобто ефемеридною інформацією. Мобільна станція потребує знання орбіт супутників GPS для використання дальномірних сигналів від супутника GPS при визначенні положення мобільної станції (з використанням А-компонента GPS). Сервер підтримки може забезпечувати мобільну станцію новими або додатковими даними ефемерид, наприклад, корекціями ефемерид. Згідно з винаходом, сервер підтримки робить це, використовуючи повідомлення, спеціально адаптовані до так званих модернізованих сигналів GPS (L2C, L5 і L1C згідно з IS-GS-200D, IS-GPS-705 і IS-GPS-800). Відповідно, мобільна станція може вимагати нових або додаткових даних ефемерид через повідомлення, також спеціально адаптоване до модернізованих сигналів GPS. Зокрема, винахід надає значення для IE в існуючому повідомленні, яке призначається згідно з процедурами, не передбаченими в існуючих системах, і цим однозначно ідентифікує дані ефемерид. GPS може бути глобальною системою позиціонування Міністерства оборони США, або може бути іншою GPS, якщо вона передає так звані модернізовані сигнали GPS, або їх еквіваленти, тобто повідомлення, що містять ту ж інформацію. Як уже відзначалось, існуючі системи передбачають повідомлення, що однозначно ідентифікують дані ефемерид лише у випадку заздалегідь модернізованих сигналів, тобто так званих Ll-сигналів GPS, і не надають механізму, яким мобільна станція або SMLC можуть однозначно ідентифікувати нові або додаткові ефемериди через модернізовані сигнали. Існуючі рішення забезпечують поле (10 біт) IODC (годинник для даних) (10 біт) і IODE (дані ефемерид) (8 наймолодших біт IODC) у повідомленнях, що стосуються нових або додаткових даних ефемерид. Ці два поля разом дозволяють мобільному пристрою однозначно визначити, чи змінилась ефемеридна інформація для супутника, а також надає мобільному пристрою можливість пов'язувати набір даних корекції DGPS з правильною ефемеридною інформацією для супутника. У модернізованих сигналах, тобто L2C, L5 і L1C, замість так званого повідомлення "NAV" (навігаційного), передбаченого у більш ранніх модернізованих сигналах, є так зване повідомлення "CNAV" для передачі (проміж іншим) ефемерид. Повідомлення CNAV є поліпшеною версією більш ранніх повідомлень NAV. Повідомлення CNAV містить більш точну репрезентовані і номінально більш точні дані, ніж повідомлення NAV. Така ж інформація (час, статус, ефемериди і альманах) передаються у повідомленні CNAV, як і у повідомленні NAV, але у новому форматі. Замість використання кадр/субкадрової архітектури, як у повідомленні NAV, повідомлення CNAV використовує псевдопакетований формат, побудований з 12-секундних 300-бітових пакетних повідомлень. Для сигналів L2C і L5 ефемериди надходять у повідомленні CNAV-1, а у випадку L1C - у повідомленні CNAV-2. CNAV-1 не містить IE IOD (тобто ні IODC, ні IODE IE); отже, ідентифікація ефемерид у випадку повідомлення CNAV-1 базується на віці ефемериди. CNAV-2 не містить IE IODC, але містить 8-бітове поле IE, яке називають ITOW (Часовий Інтервал для Вимірювання Часу Тижня) і яке надає кількість двогодинних часових інтервалів (епох), які пройшли після попереднього тижня. Винахід дає механізм однозначного надання у повідомленні з допоміжними даними і у повідомлені з вимогою допоміжних даних версії ефемерид (віку ефемерид, тобто, коли вони були передані широкомовленням) у повідомленні CNAV-1 або CNAV-2. Щоб розрізнити версії ефемерид, переданих у різні часи, механізм, наданий винаходом, використовує інтервал часу, що пройшов з попереднього тижня, тобто інтервал між передачею ефемерид і кінцем попереднього тижня. Цей механізм може бути використаний для однозначної ідентифікації різних версій даних ефемерид у повідомленні з допоміжними даними, для однозначної ідентифікації різних версій корекції DGNSS і для точного парування корекцій DGNSS з точними даними ефемерид, для однозначного поточного визначення даних ефемерид у пам'яті мобільних станцій через повідомлення з вимогою допоміжних даних і встановлення флагу попередження у випадках, коли був порушений номінальний інтервал передач. Винахід може бути використаний для ідентифікації ефемерид у сигналах L2C, L5 і L1C GPS або SBAS, або QZSS і може також бути застосований для інших типів GNSS, наприклад, Galileo. Винахід надає функціональність, подібну до існуючих механізмів ідентифікації, базованих на IODE (що використовуються у випадку раніше модернізованого сигналу Ll GPS), і тому функції, пов'язані з позиціонуванням, можуть бути подібними до LI GPS. Перевагою винаходу є те, що 2 UA 99266 C2 5 10 15 20 25 30 35 40 45 50 55 однакова структура повідомлення (10-бітове IE IODE) може бути використана як для модернізованих, так і раніше модернізованих сигналів. Згідно з винаходом, 8 біт ITOW IE у CNAV-2 використовуються (у повідомленні з допоміжними даними або їх вимогою) для ідентифікації ефемерид, надісланих CNAV-2 (тобто діють як мітка), а 8-бітове ITOW для CNAV-1 отримується SMLC і мобільним пристроєм з переданого супутником CNAV-1 (тобто воно обчислюється SMLC і мобільним пристроєм, базуючись на часі прийому ними переданого CNAV-1). Межі "ITOW" у CNAV-1 визначено від O до 84, подібно до ITOW у IS-GPS-800 від 19/04/ 2006, р. 48, Chapter 3.5.3.2, а саме: Біти 14-21 субкадру 2 містять 8 біт, що репрезентують відлік ITOW, визначений як кількість двогодинних епох, що пройшли з моменту переходу з попереднього тижня. Цей відлік є короткоциклічним, і тому відлік ITOW має межі 0-84 2-годинних епох (що дорівнює одному тижню) і встановлюється у O наприкінці кожного тижня. Нульовий стан відліку ITOW визначено як збіг 2-годинної епохи з початком поточного тижня. Ця епоха припадає (приблизно) на північ суботи - ранок неділі, де північ визначено як 0000 год. на шкалі UTC, номінально базованої на Гринвічському меридіані. Повідомлення з допоміжними даними може бути, наприклад, повідомленням GNSS (навігаційним) (Таблиця 3) або повідомленням DGNSS (корекції) (Таблиця 4). Обидва включають 10-бітове IE IOD. Згідно з винаходом, 8 з 10 біт цього IOD (звичайно 8 молодших біт) призначено для 8-бітового ITOW, як у винаході, тобто вони слугують як IODE, визначене вище. Крім того, повідомлення з вимогою допомоги (Таблиця 5) також включає IE IOD і мобільний пристрій має використовувати це IE для надсилання ITOW/IODE згідно з винаходом. Винахід також включає модуль (програмний або ASIC) для використання у SMLC або мобільному пристрої для визначення значення ITOW для сигналу CNAV-1 або щоб отримати значення ITOW з сигналу CNAV-2. Такий модуль може бути названий модулем створення IODE. Модуль створення IOD-E може бути по суті однаковим як для мобільної станції, так і для SMLC. Винах також включає модуль для мобільної станції, завдяки чому вона зможе використовувати створене IOD-E (тобто значення ITOW, побудоване або отримане, тобто надане ITOW через CNAV-2 або обчислене для CNAV-1) для однозначної ідентифікації даних ефемерид у повідомленні з вимогою допоміжних даних. Такий модуль тут названо навігаційним допоміжним модулем мобільної станції. Винахід також включає модуль для SMLC, за допомогою якого SMLC зможе використовувати IE IOD у повідомленнях з допоміжними даними таким чином, щоб однозначно ідентифікувати відповідні ефемериди. Такий модуль названо навігаційним допоміжним модулем SMLC. Навігаційні допоміжні модулі мобільної станції і SMLC є різними, оскільки A-GPS мобільної станції вимагає допоміжних даних і потім аналізує отримані дані, a SMLC надає допоміжні дані за вимогою. Модулі згідно з винаходом можуть бути застосовані як незалежні програмні модулі (збережені у пристрої пам'яті мобільної станції або сервера SMLC для завантаження у виконавчу пам'ять для отримання інструкцій для виконання процесором), або як схемні модулі, наприклад, як прикладна спеціалізована інтегральна схема (ASIC), або як модулі, що є компонентами інших модулів мобільної станції або сервера SMLC, тобто як машина з пам'яттю для зберігання даних і інструкцій і з процесором для виконання інструкцій, що зберігаються у пам'яті, після завантаження інструкцій у виконавчу пам'ять. Крім того, модулі для мобільної станції можуть бути виконані як єдиний модуль або можуть бути виконані у комбінації з іншими модулями мобільної станції і, подібним чином, для SMLC. Мобільною станцією може бути пристрій, що слугує лише якдальномірний приймач (тобто такий, який звичайно називають GPS і названий тут приймачем A-GPS) і включає лише ту функціональність стільникового зв'язку, яка є необхідною для вимоги і отримання допоміжних даних від SMLC, з яким вона має зв'язок через, наприклад, компонент радіодоступу стільникової мережі зв'язку, або мобільна станція може бути обладнана повнофункціональним терміналом стільникового зв'язку, якій як додатковий елемент включає дальномірний приймач (тобто GPS або приймач GPS). Мобільна станція може використовувати один процесор для обробки дальномірних сигналів (сигналів, прийнятих від супутників GPS дальномірним приймачем, які надають відстань між супутником і дальномірним приймачем), і інші для підтримання зв'язку через безпровідну мережу, або вона може використовувати єдиний процесор для щонайменше деякого зв'язку як з SMLC, так і супутниками GPS. Функціональність винаходу у мобільній станції і SMLC звичайно реалізують у так званому прикладному рівні багаторівневого протоколу, згідно з яким здійснюється зв'язок між мобільною станцією і стільниковою мережею (і, зокрема, з SMLC). 3 UA 99266 C2 5 10 15 20 25 30 35 40 45 50 55 Об'єкти, особливості і переваги винаходу розглядаються далі у детальному описі з супроводжуючими кресленнями, в яких: фіг. 1 - схема IE/поля IOD-E (зміст даних ефемерид) згідно з винаходом, на основі значення ITOW для даних ефемерид; фіг. 2А - блок-схема дальномірного приймача (приймача A-GPS), що має зв'язок з супутником GPS і SMLC через стільникову базову станцію; фіг. 2В - блок-схема SMLC з фіг. 2А з компонентами винаходу; фіг. 3А - схема операцій приймача A-GPS і SMLC з фіг. 1 згідно з винаходом при прийомі так званого повідомлення CNAV-1 з даними ефемерид; фіг. 3В - схема операцій приймача A-GPS і SMLC з фіг. 1 згідно з винаходом при прийомі так званого повідомлення CNAV-2 з даними ефемерид; фіг. 4 - схема операцій способу, що використовується у мобільній станції для отримання навігаційних допоміжних даних від сервера навігаційної підтримки стільникової мережі згідно з винаходом, або використовується у сервері навігаційної підтримки згідно з винаходом; фіг. 5 - блок-схема пристрою, призначеного для використання мобільною станцією при отриманні навігаційних допоміжних даних від сервера навігаційної підтримки стільникової мережі згідно з винаходом, або для використання сервером навігаційної підтримки згідно з винаходом; Далі наведено опис винаходу, реалізованого у мобільній станції, яка обладнана для підтримання стільникового зв'язку з стільниковою мережею і включає так званий приймач AGPS, тобто приймач GPS (або просто GPS), обладнаний для прийому не лише дальномірних сигналів від супутників, але й навігаційних допоміжних даних від Центру Визначення Положень Мобільних пристроїв (SMLC) стільникової мережі через стільниковий зв'язок. Однак, винахід може бути застосований не лише у системах стільникового зв'язку для отримання навігаційних допоміжних даних, але й в інших, відмінних від GPS системах, зокрема у будь-якій GNSS, де використовуються сигнали, що несуть таку ж інформацію, як і модернізовані сигнали (NAVSTAR) GPS. Тут винаходом запропоновано механізм для ідентифікації ефемеридної інформації (тобто механізм визначення, яка саме поточна ефемеридна інформація у повідомленнях, передається від SMLC стільникової мережі до мобільної станції, що має приймач A-GPS, і для використання в ідентифікуванні ефемеридної інформації у повідомленнях від мобільної станції до SMLC з вимогою додаткових або нових даних ефемерид. Цей механізм використовується для наборів даних ефемерид з "модернізованих" сигналів GPS, тобто, даних з сигналів L2C, L5 і L1C, визначених у IS-GPS-200D, IS-GPS-705 і IS-GPS-800 для добре відомої системи глобального позиціонування, яку звичайно називають GPS. Цей механізм може бути використаний і в інших супутникових системах, відмінних від GPS. Як було відзначено, термін "GPS" стосується будь-якої супутникової системи глобального позиціонування, якщо не зазначено, що йдеться про добре відому (NAVSTAR) GPS. Супутникові аугментаційні системи GPS, наприклад, Супутникова Аугментаційна Система SBAS і японська система Quazi-Zenith (QZSS), можуть передавати модернізовані сигнали GPS і тому можуть використовувати механізм, запропонований винаходом. Винахід може також бути застосований у GNSS Galileo або у будь-якій іншій GNSS або підтриманій GNSS (AGNSS), яка використовує сигнали, подібні сигналам L2C, L5 або L1C GPS, тобто сигнали, що несуть ту ж інформацію. Отже, винахід стосується взагалі підтриманих навігаційних систем, зокрема, специфікацій допоміжних даних і протоколів у добре відомій GERAN (Мережа радіодоступу до Глобальної Системи Мобільного Зв'язку (GSM)), UTRAN (Наземна Мережа радіодоступу до Універсальної Мобільної Система телезв'язків (UMTS)) і ОМА (Відкритий Мобільний Альянс) SUPL (Безпечна Користувацька Область Положень). Як уже відзначалось, винахід, описаний тут стосується, головним чином, добре відомої (NAVSTAR) GPS. Дані ефемерид LI GPS Усі протоколи для раніше модернізованих допоміжних даних підтримують лише GPS, зокрема, лише сигнал LI GPS і відповідні навігаційні дані. Навігаційні дані LI GPS включають дані ефемерид для супутника (дані ефемерид LI GPS), потрібні для точного визначення положення і швидкості супутника у функції часу. Дані ефемерид LI GPS згідно з ICD-GPS-200C (і IS-GPS-200D) мають такі характеристики: • номінальний інтервал апроксимації кривої становить 2 год., але може становити навіть 26 або 98 год. залежно від типу супутника (наприклад, Block HA, Block IIR-M) як це показано у Таблицях 20-Xl і 20-ХІІ у IS-GPS-200D. 4 UA 99266 C2 5 10 15 20 25 30 35 40 45 50 55 60 • довжина інтервалу апроксимації кривої вказано флагом інтервалу апроксимації (Chapter 20.3.3.4.3.1, IS-GPS-200D), а значення Годинника Надання Даних (IODC) наведено у Таблицях 20-Xl і 20-ХІІ у IS-GPS-200D. • Годинник Надання Даних (10 біт) і Дані Ефемерид (IODE, 8 наймолодших біт IODC) однозначно ідентифікують поточні дані ефемерид, і тому мобільна станція може використовувати IODE або (IODC) для перевірки, чи змінились дані ефемерид конкретного супутника. IODE даних ефемерид LI GPS можуть також знайти два інші використання у протоколах допоміжних даних окрім ідентифікації поточних ефемерид і їх інтервалу апроксимації кривої. Ними є: 1) IODE (8-бітове І Е/поле) даних ефемерид LI GPS також використовується для ідентифікації набору даних корекції DGPS, і тому мобільна станція може однозначно визначити, чи може вона застосувати корекції DGPS для даних ефемерид супутника у пам'яті станції. Корекції DGPS усувають помилки у вимірюваннях псевдовідстані, породжені атмосферними спотвореннями і помилками у визначенні положення супутника (помилки ефемерид), а це робить життєво важливим застосування корекцій DGPS до даних ефемерид. Якщо корекції DGPS застосовуються до даних ефемерид, відмінних від даних, використаних для формування цих корекцій, визначення мобільною станцією положення стає повністю непередбачуваним і може дати значні помилки позиціонування. Отже, IODE дає корекції DGPS і мобільна станція має перевіряти IODE, щоб уникнути використання цих корекцій для несумісних з ними даних ефемерид. 2) IODE (IODC) використовується у вимогах допоміжних даних для ідентифікації даних ефемерид, які мобільна станція у даний момент має у її пам'яті, щоб SMLC не надсилав знову тих же ефемерид у допоміжних даних і надсилав лише ті дані ефемерид, які зазнали змін, або ті, що є відсутніми у мобільній станції. Використання IODE у корекціях DGPS описано, наприклад, у 3GPP (Програма Партнерства Третього Покоління), TS (Технічна Специфікація) 44.031, а використання IODE у вимогах допоміжних даних описано, наприклад, 3GPP, TS 49.031. Модернізовані дані ефемерид GPS Модернізація GPS запровадила щонайменше 3 нові сигнали для громадянського застосування, а саме, L2C, L5 і L1C. Ці нові сигнали широкомовно передають також модернізовані версії навігаційних даних, в яких дані ефемерид також змінено. їх названо ефемеридами CNAV-1 (відповідають ефемеридам сигналах L2C і L5) або ефемеридами CNAV2 (відповідають ефемеридам у сигналі L1C). Ефемериди CNAV-1 мають такі характеристики і відмінності від даних ефемерид у LI GPS: • інтервал апроксимації кривої становить 3 год., але номінальний інтервал передачі становить 2 год. і це збігається з першим двогодинним інтервалом апроксимації кривої згідно з IS-GPS-200D, pp. 155 або IS-GPS-705, pp. 55. Отже, номінальний період оновлення ефемерид становить 2 год. Можна оновлювати дані ефемерид у передачах супутника частіше, ніж кожні 2 год., але такі випадки є рідкими виключеннями з номінальних функцій. • CNAV-1 не містить будь-яких полів надання даних для ідентифікації даних, і ідентифікація ефемерид у мобільній станції практично базується на віці ефемерид. • CNAV-1 не містить будь-яких полів для інтервалу апроксимації кривої, оскільки вона базується на фіксованих значеннях. Ефемериди CNAV-2 мають такі характеристики і відмінності від даних ефемерид у LI GPS: • інтервал апроксимації кривої становить 3 год., але номінальний інтервал передачі становить 2 год., як у CNAV-1, згідно з IS-GPS-800, pp. 44. • CNAV-2 не містить будь-яких полів для інтервалу апроксимації кривої, оскільки вона базується на фіксованих значеннях, як і у. CNAV-1 • CNAV-2 не містить будь-яких полів надання даних, для ідентифікації даних, як і у CNAV-1. Однак, CNAV-2 містить 8-бітовеполе - Час Тижня в Інтервалах (ITOW) - яке дає кількість двогодинних епох, що пройшли з моменту переходу з попереднього тижня. Роботи у 3GPP Зараз існують два так звані публічні системи GPS (точніше, GNSS): NAVSTAR і GLONASS. Система NAVSTAR належить США і знаходиться під завідуванням Міністерства Оборони. Система GLONASS належить Російській федерації. Обидві ці системи є глобальними системами позиціонування, причому систему NAVSTAR часто називають просто "GPS", оскільки вона була запроваджена першою, однак обидві вони є системами GPS і є системами GNSS. Існують також супутникові аугментаційні системи (SBAS), які надають додаткову інформацію, наприклад, для GPS для поліпшення позиціонування і цілісності. Супутники SBAS 5 UA 99266 C2 5 10 15 20 25 30 звичайно є геостаціонарними і обслуговують лише деякі географічні регіони, і тому ця система не є глобальною. Існують або розгортаються декілька SBAS для покриття різних регіонів, наприклад, Широкозонна Аугментаційна Система (WAAS) для Північної Америки і Тихого океану, Європейська Геостаціонарна Перекривна Система (EGNOS) для Європи і Північної Африки і Багатофункціональна Супутникова Аугментаційна Система (MSAS) для азійського регіону. Супутники SBAS І використовують таку ж структуру сигналів, як наприклад, GPS для забезпечення прийому і демодуляції сигналів SBAS приймачами GPS, з зміною лише програмного забезпечення у приймачах GPS. Як уже зазначалось, GPS і GLONASS є системами типу GNSS. Приймач, що підтримує GNSS, звичайно використовує NAVSTAR і GLONASS для виконання позиціонування разом з іншими компонентами для підвищення точності і своєчасного попередження про проблеми. Поточна робота, наприклад, в області стандартизації 3GPP фокусується на GNSS найближчого майбутнього, наприклад, Galileo, GLONASS, SBAS і QZSS для визначення повідомлень з допоміжними даними і особливостей цих систем. Ці системи будуть розгорнуті (або розгорнуті повторно, як у випадку GLONASS) протягом найближчих 4-6 років. Зрозуміло, що повідомлення з допоміжними даними і з вимогами допоміжних даних також мають бути перевизначені для забезпечення сумісності з цими системами. Деякі з останніх пропозицій включають також диференційну GNSS (DGNSS), яка поширюватиме диференційні корекції GPS до інших супутникових систем і до модернізованих GPS. Винахід надає механізм ідентифікації даних ефемерид з модернізованих сигналів GPS, який може бути використаний для однозначної ідентифікації набору даних ефемерид за допомогою корекцій DGNSS і повідомлень з вимогою допоміжних даних. Проблеми, що вирішуються винаходом Як уже відзначалось, стільникові стандарти зараз підтримують лише дані ефемерид LI GPS і, отже, всі допоміжні дані і повідомлення з вимогою допоміжних даних базуються лише на ідентифікації TODE. IODE базується на 8- або 10-бітовому IE/полі, яке може включати повні значення IODE і IODC з переданих ефемерид GPS. Слід відзначити, що майбутня система Galileo також використовує 10-бітові ідентифікатори наданих даних ефемерид, що полегшує надання підтримки для Galileo згідно з стандартами лише перевизначенням деяких полів (IODE + резерв) без введення нових IEs/полів або нової їх інтерпретації. Таблиця 1 містить IE DGPS згідно з 3GPP, TS44.031 (Таблиця А. 15). Таблиця 1 Корекції DGPS Параметр Біти Масштабний коефіцієнт Межі Одиниці наведені далі поля з'являються одноразово у кожному повідомленні GPS TOW 20 1 0-604799 сек. Статус/Готовність 3 1 0-7 N_SAT 4 1 1-16 наведені далі поля з являються одноразово у супутник (N_SAT разів) Ідентиф. супутника 6 0-63 IODE 8 0-255 UDRE 2 0-3 PRC 12 0.32 ±655.04 M RRC 8 0.032 ±4.064 м/сек. Дельта PRC2 8 Дельта RRC2 4 Дельта PRC3 8 Дельта RRC3 4 35 Вкл. M M M M M M M M M M M M Таблиця 2 містить необхідні для GNSS допоміжні дані IE для вимоги допоміжних даних від SMLC згідно 3GPP, TS 49.031 Chapter 10.10. 6 UA 99266 C2 Таблиця 2 Кодування даних, що стосуються супутника у вимозі допоміжних даних IE GPS. Октет 5 Октет 6 Октет 7 Октет 8 Октет 9 Октет 10 … Октет 7+2n Октет 8+2n 5 10 15 20 25 30 35 40 45 8 7 Тиждень GPS Резерв 6 5 4 3 2 Резерв Тиждень GPS резерв NSAT GPS_ Toe NSAT Межі Т-Тое Ідентифікатор супутника 1 IODE1 Резерв 1 Ідентифікатор супутника 2 IODEn Можна бачити, що 8-бітове значення зарезервовано для IODE. Для 10-біфтового IOD Galileo можуть бути призначені IODE і 2 резервні біти. Оскільки CNAV-1 і CNAV-2 не містять IODE або IODC, мобільна станція не може зіставляти корекції (DGPS) з правильними ефемеридами і тому не може визначити, які дан ефемерид CNAV-1 або CNAV-2 - є у її пам'яті у момент надсилання вимоги нових допоміжних даних. Аспекти винаходу і його різні втілення Як уже відзначалось, винахід надає механізм для ідентифікації даних ефемерид CNAV-1 і CNAV-2 у допоміжних даних і повідомленнях з вимогою допоміжних даних, базований на часі, що минув з попереднього тижня. Така ідентифікація може бути використана для однозначної ідентифікації версій даних ефемерид у повідомленнях з допоміжними даними, однозначної ідентифікації різних версій корекцій DGNSS і для зіставлення корекцій DGNSS з належними даними ефемерид, для однозначного визначення даних ефемерид, що у даний момент зберігаються у пам'яті базової станції у повідомленнях з вимогою допоміжних даних і для встановлення флагу попередження про порушення номінального інтервалу передачі. Винахід призначено, головним чином, для використання з сигналами L2C, L5 і L1C GPS або подібних систем (SBAS, QZSS), але така ж концепція може бути втілена в інших супутникових системах, наприклад, Galileo. Винахід включає функціональність, подібну до існуючих рішень, базованих на IODE, і тому очікувані ефективність і функція позиціонування не відрізнятимуться для дальномірних приймачів, що використовують LI GPS, і тих, що використовують модернізовану GPS. Перевагою є те, що одна структура повідомлення (10-бітове IE/поле IODE) може використовуватись у будь-якій супутниковій системі. Втілення дотримується "ITOW-концепції", запропонованої для CNAV-2 у IS-GPS-800. Ідентифікація ефемерид, подібна до ITOW пропонується для ідентифікації даних ефемерид CNAV-1. IE/поле, що вказує кількість двогодинних від попереднього тижня, може однозначно бути використане також для апроксимації кривої CNAV-1 за замовчування, а номінальні інтервали передачі є такими, як для CNAV-2. "ITOW" у CNAV-1 надається з 8-бітовим IE/полем, подібними до ITOW CNAV-2. SMLC і мобільна станція можуть легко отримати цю інформацію з супутникового широкомовлення. Межі "ITOW" CNAV-1 становлять O-84 подібно до ITOW у IS-GPS-800, pp.48, Chapter 3.5.3.2. ITOW CNAV-2 і "ITOW" CNAV-1 включено як 8 наймолодших біт у 10-бітовому IE/полі IOD (IODE) у повідомленнях з допоміжними даними. 10-бітове IE/поле 1OD(E) (показане також як поле IOD-E) має 2 біти у резерві, які можуть бути використані, наприклад, для таких змін: Біт 8 1OD(E) може бути використаний як флаг попередження або як додатковий індикатор для CNAV-1/ефемериди CNAV-2, що вказує, чи був порушений номінальний інтервал передачі. У цьому випадку супутники можуть мати передачу оновлених даних ефемерид до завершення повної 2-годинної епохи, що має бути вказано 1OD(E). Біт 8 1OD(E) встановлюється у 1, якщо номінальний інтервал передачі не дорівнює 2 год. Біт 9 є резервним. IE/поле IOD включено у IE DGNSS, IE Навігаційної моделі GNSS і у вимогу допоміжних даних IE GNSS, як це запропоновано, наприклад, у G2-060273 і G2-060274 (Таблиця 3 для ефемерид, Таблиця 4 для DGNSS і Таблиця 5 для вимог допоміжних даних. Тепер IE/поле 1OD може бути використане також для даних ефемерид CNAV-1 і CNAV-2 без помилок. 7 UA 99266 C2 Таблиця 3 Навігаційна модель GNSS з IOD Масштабний Одиниці коефіцієнт Поточний контроль навігаційної модели (одноразово на повідомлення) Num_Sat 5 1 Неширокомовна індикація 1 Період дійсності 4 1 год. toe/c мобільної станції 5 21600 сек. a e_MSB 7 Z sqrtA_MSB 6 2' M Ці поля з'являються одноразово для супутника {Num_Sat разів) SVID 6 Індекс частоти носія 5 Готовність супутника 5 … булева IOD 10 Див. Табл. Модель годинника GNSS А.44.1 Див. Табл. Модель орбіти GNSS А.44.2 Див. Табл. Точність моделі орбіти GNSS А.44.3 Параметр Біти Вкл. M M C C C C M о M M M M O Таблиця 4 Корекції DGNSS з IOD Масштабний Межі Одиниці коефіцієнт Ці поля з'являються одноразово на кожне повідомлення Еталонний час DGNSS 7 30 0-3570 сек. Ці поля з'являються одноразово у сигналі типу GNSS (N_SGN_TYPE разів) Ідентифікатор сигналу GNSS 2 Статус/Готовність 3 1 0-7 N SGN 4 1 1-16 Ці поля з'являються одноразово у сигналі GNSS (N_SGN разів Ідентифікатор SV 6 … 0…63 IOD 10 UDRE 2 0-3 PRC 12 0.32 ±655.04 M RRC 8 0.032 ±4.064 м/сек. Параметр Біти Вкл. on M M M M M M M *: відсутність цього поля означає L.1 OS Galileo, якщо ідентифікатором GNSS ID є Galileo 8 UA 99266 C2 Таблиця 5 Кодування даних, що стосуються Супутник Related у 10-бітовому IOD Октет 5 8 7 Тиждень GPS 6 5 4 3 2 Ідентифікатор GNSS Тиждень GPS резерв NSAT GPS_Toe Межі Т-Тое Ідентифікатор супутника 1 GNSS IOD 1 Октет 6 Октет 7 Октет 8 Октет 9 Октет 10 Октет 7+2n Октет 8+2n 5 10 15 20 25 30 35 40 45 NSAT IOD 1 1 Ідентифікатор супутника n GNSS IOD n IOD n Фіг. 1 ілюструє приймач A-GPS 20 (або мобільну станцію з функціональністю GPS) згідно з одним з аспектів винаходу, який має стільникову антену 20с і антену 20d GPS. Він також має енергонезалежну пам'ять 20а і процесори 20b для виконання програм, що зберігаються у пам'яті. Крім того, приймач може включати ASIC 20b (прикладні спеціалізовані мікросхеми) для виконання деяких функцій. Щонайменше деякі з процесорів і/або ASIC мають стільниковий зв'язок з SMLC 23 через стільникову антену 20с і стільникову базову станцію 22. Щонайменше деякі процесори і/або ASIC конфігуровано обробляти дальномірні сигнали, прийняті з супутників 21 або від системи глобального позиціонування антеною 20d GPS. Процесори 20b звичайно зчитують і записують дані у енергонезалежну пам'ять, наприклад, дані ефемерид. Пам'ять 20а може зберігати програми для створення значень IOD-E згідно з винаходом (тобто використовуючи значення ITOW як IOD-E, причому ITOW отримано для повідомлень CNAV-1, як це розглянуто нижче) для використання в ідентифікації даних ефемерид, і програми для вимог і обробки допоміжних даних GPS, з використанням IOD-E згідно з винаходом. В іншому варіанті функції створення IOD-E згідно з винаходом і/або для вимог і обробки допоміжних даних GPS, використовуючи IOD-E згідно з винаходом, виконуються одною або більше ASIC 20b. На фіг. 2В більш детально показано SMLC з фіг. 2А, який також має енергонезалежну пам'ять 24а і процесори 24b для виконання програм, що зберігаються у пам'яті. Як і приймач AGPS, SMLC може включати ASIC 20b для виконання деяких функцій. Пам'ять 24а може зберігати програми для створення значень IOD-E згідно з винаходом для використання в ідентифікації даних ефемерид, і програми для формування допоміжних даних GPS, використовуючи IOD-E згідно з винаходом. В іншому варіанті функції створення IOD-E згідно з винаходом і/або формування допоміжних даних GPS, використовуючи IOD-E згідно з винаходом, виконуються одною або більше ASIC 20b. Будь-які функції, хоча і показані як такі, що виконуються модулем, можуть виконуватись програмно або схемно (тобто ASIC), і можуть бути реалізовані як компоненти інших модулів. Зокрема, програми у мобільній станції/A-GPS призначено для у SMLC або у мобільній станції для визначення ITOW для сигналу CNAV-1. Програми також уможливлюють для мобільної станції використання ITOW (отриманий з CNAV-2 або обчислений для CNAV-1) для однозначної ідентифікації даних ефемерид у повідомленні з вимогою допоміжних даних. Відповідні програми є у SMLC, завдяки чому SMLC може використовувати IE/поле IOD у повідомленнях з допоміжними даними у спосіб, який однозначно ідентифікує відповідні ефемериди. Як уже було відзначено, мобільна станція/A-GPS може бути пристроєм, який слугує як дальномірний приймач і має лише функції стільникового або іншого безпровідного зв'язку, необхідні для надсилання вимог і отримання допоміжних даних від SMLC, з яким вони мають зв'язок, наприклад, через мережевий компонент радіодоступу мережі стільникового зв'язку, або мобільна станція може бути повнофункціональним терміналом стільникового або іншого безпровідного зв'язку з додатковим компонентом - дальномірним приймачем. Фіг. 3А ілюструє функціонування SMLC і A-GPS (або мобільної станції з функціональністю AGPS) згідно з аспектом винаходу, що стосується даних CNAV-1. Цей спосіб включає першу операцію 31а, якою A-GPS/мобільна станція приймає сигнал CNAV-1, і наступну операцію 32а, якою A-GPS/мобільна станція обчислює значення ITOW для сигналу, базуючись на часі широкомовної передачі сигналу (і використовуючи час початку тижня, який може також бути 9 UA 99266 C2 5 10 15 20 25 30 35 40 45 50 55 обчислений A-GPS) для отримання даних ефемерид, включаючи ITOW. Обчислене значення ITOW має те ж значення ITOW, яке міститься у повідомленні CNAV-2. Наступною операцією 33а A-GPS/мобільна станція надсилає повідомлення до SMLC з вимогою допоміжних даних про положення (через мережу радіодоступу системи стільникового зв'язку) і ідентифікує ефемериди, які воно містить, використовуючи ITOW як поле IOD-E у вимозі допоміжних даних, тобто використовуючи ITOW як 8 наймолодших біт 10-бітового поля IOD у повідомленні з вимогою допоміжних даних. Наступною операцією 34а SMLC відповідає повідомленням з допоміжними даними, надаючи нові дані ефемерид або зміни у цих даних, вказані AGPS/мобільною станцією, і використовує ITOW відповідно до цих нових або змінених даних як IE/поле IOD-E у повідомленні з допоміжними даними, тобто як 8 наймолодших біт 10-бітового IOD у повідомленні з допоміжними даними. Фіг. 3В ілюструє функціонування SMLC і A-GPS (або мобільної станції з функціональністю AGPS) згідно з аспектом винаходу, що стосується даних CNAV-2. включає першу операцію 31Ь, якою A-GPS/мобільна станція приймає сигнал CNAV-2, і наступною операцією 32b A-GPS/ мобільна станція отримує дані ефемерид і ITOW у них. Наступна операція 33b A-GPS/MS є такою ж, як для повідомлення CNAV-1 (операція 32А фіг. 3А), нею надсилається до SMLC повідомлення з вимогою допоміжних даних про положення (через мережу радіодоступу системи стільникового зв'язку) і здійснюється ідентифікація ефемерид, яке воно містить, з використанням ITOW як IE/поля IOD-E у вимозі допоміжних даних, тобто з використанням ITOW як 8 наймолодших біт 10-бітового поля IOD у повідомленні з вимогою допоміжних даних. Наступною операцією 34Ь, як і у випадку даних CNAV-1, SMLC відповідає повідомленням з допоміжними даними, яке надає нові дані ефемерид або зміни у цих даних, надані A-GPS/MS, і використовує ITOW, що відповідає цим новим або зміненим даним, як IE/поле IOD-E у повідомленні з допоміжними даними, тобто як 8 наймолодших біт 10бітового IOD у повідомленні з допоміжними даними. Для того, щоб надавати ефемеридну інформацію, сервер підтримки SLMC має бути забезпечений поточними ефемеридами. Для цього сервер підтримки може мати приймач для прийому навігаційних сигналів від супутників GPS (або іншої GNSS), або сервер підтримки може отримувати навігаційні сигнали від супутників приймачем, відокремленим від сервера підтримки. Винахід також включає спосіб (фіг. 4) і відповідний пристрій (фіг. 5), призначені для використання мобільною станцією/A-GPS для отримання навігаційних допоміжних даних від сервера навігаційної підтримки стільникової або іншої безпровідної мережі або для використання сервером навігаційної підтримки. Спосіб згідно з винаходом включає операцію 41 надання переданого широкомовно значення часу тижня (або іншого придатного значення, що вказує час) для навігаційного сигналу, як ідентифікатора ефемерид (або ефемеридної інформації), включеного у навігаційний сигнал, а відповідний пристрій включає модуль 51 створення цього ідентифікатора. У випадку CNAV-1 і відповідних сигналів в інших типах GNSS ідентифікатор формується на основі значень часу прийому навігаційного сигналу і часу початку тижня. У випадку CNAV-2 ідентифікатор отримується безпосередньо з навігаційного сигналу. Спосіб згідно з винаходом також включає операцію 42, використовуючи ідентифікатор як основу для визначення, чи є дані ефемерид більш або менш поточними порівняно з деякими іншими даними ефемерид, а пристрій включає відповідний навігаційний допоміжний модуль 52. Мобільна станція робить це, включаючи ідентифікатор у навігаційне повідомлення з вимогою допоміжних даних. Сервер навігаційної підтримки SMLC робить це, порівнюючи цей ідентифікатор з відповідним ідентифікатором поточних ефемерид. Переваги Винахід уможливлює використання існуючих IE/поля IODE і функціональності, наприклад, для корекцій DGNSS (DGPS), зіставляючи іх з даними ефемерид CNAV-1 і ефемерид CNAV-2. Одне з втілень дозволяє робити це з таким же 10-бітовим ІЕ/полем без IE/полів CNAV-1 і CNAV2 у повідомленнях з допоміжними даними і протоколами. Винахід може бути безпосередньо використаний з RRLP (протокол для A-GNSS згідно з GERAN 3GPP), протоколом RRC (Контроль радіоресурсів) (мережевий протокол радіодоступу 3GPP, який включає A-GNSS) і протоколом ОМА SUPL (протокол даних положення для зв'язку з комутацією пакетів). Винахід є сумісним з майбутніми розробками, оскільки передбачає резервування ресурсів для майбутніх функцій. Висновки 10 UA 99266 C2 Зрозуміло, що наведений вище опис є лише ілюстративним прикладом застосування концепцій винаходу. Фахівець може зробити численні модифікації і знайти альтернативні варіанти у межах об'єму винаходу, і Формула винаходу включає такі модифікації і варіанти. 5 10 15 20 25 30 35 40 45 50 55 ФОРМУЛА ВИНАХОДУ 1. Спосіб супутникової навігації, що призначена для використання мобільною станцією або сервером навігаційної підтримки в процесі одержання навігаційної підтримки з сервера навігаційної підтримки безпровідної мережі, за яким: - забезпечують у пристрої, який розміщено в мобільній станції і в сервері навігаційної підтримки, значення показника часу для навігаційного сигналу як ідентифікатора ефемеридної інформації, включеної у навігаційний сигнал, базуючись на проміжку часу між ефемеридною інформацією і кінцем тижня до цієї ефемеридної інформації, причому навігаційним сигналом є сигнал L2C, L5 або L1C GPS, або відповідний сигнал глобальної навігаційної супутникової системи іншого типу, - використовують ідентифікатор як основу для визначення, чи є ефемеридна інформація більш недавньою інформацією порівняно з іншою ефемеридною інформацією. 2. Спосіб за п. 1, в якому навігаційний сигнал не містить показник часу, і забезпечення показника часу включає отримання значення цього показника, яке базується на значенні часу прийому навігаційного сигналу і значенні часу початку тижня. 3. Спосіб за п. 1, в якому прийнятий навігаційний сигнал містить показник часу, і забезпечення значення показника часу включає отримання показника часу з прийнятого навігаційного сигналу. 4. Спосіб за п. 1, який призначено для використання мобільною станцією і який додатково включає формування повідомлення з вимогою навігаційних допоміжних даних, що містить значення часу тижня як показника ефемеридної інформації, отриманої з навігаційного сигналу. 5. Спосіб за п. 1, який призначено для використання сервером навігаційної підтримки і який додатково включає визначення, чи надавати більш недавню ефемеридну інформацію у відповідь на вимогу навігаційних допоміжних даних від мобільної станції, базуючись на порівнянні показника часу з показником часу, включеним у вимогу навігаційних допоміжних даних. 6. Спосіб за п. 1, в якому показником часу є широкомовно переданий показник часу тижня, репрезентований як 8-бітовий інформаційний елемент. 7. Спосіб за п. 1, в якому показником часу є широкомовно переданий показник часу тижня і у випадку, коли цей широкомовно переданий показник часу тижня включено у вимогу навігаційних допоміжних даних, його репрезентовано щонайменш вісьмома значущими бітами наданих даних інформаційного елемента, звичайно включеного у повідомлення з навігаційними допоміжними даними. 8. Спосіб за п. 1, в якому навігаційне повідомлення з допоміжними даними є повідомленням глобальної навігаційної супутникової системи або диференційним повідомленням глобальної навігаційної супутникової системи. 9. Пристрій для супутникової навігації, що призначена для використання мобільною станцією або сервером навігаційної підтримки в процесі одержання навігаційної підтримки з сервера навігаційної підтримки стільникової мережі, причому цей пристрій входить до складу мобільної станції або сервера навігаційної підтримки і має: - модуль створення ідентифікатора для формування для навігаційного сигналу показника часу як ідентифікатора ефемеридної інформації, включеної у навігаційний сигнал, базуючись на проміжку часу між ефемеридною інформацією і кінцем тижня цієї ефемеридної інформації, причому навігаційним сигналом є сигнал L2C, L5 або L1C GPS, або відповідний сигнал глобальної навігаційної супутникової системи іншого типу, і - навігаційний допоміжний модуль для використання ідентифікатора як основи для визначення, чи є ця ефемеридна інформація більш недавньою порівняно з іншою ефемеридною інформацією. 10. Пристрій за п. 9, в якому навігаційний сигнал не включає показник часу, а модуль створення ідентифікатора конфігуровано отримувати значення індикатора часу, базуючись на значенні часу прийому навігаційного сигналу і значенні показника часу початку тижня. 11. Пристрій за п. 9, в якому навігаційний сигнал включає показник часу, а модуль створення ідентифікатора конфігуровано отримувати значення індикатора часу з прийнятого навігаційного сигналу. 12. Пристрій за п. 9, який призначено для використання мобільною станцією і в якому навігаційний допоміжний модуль конфігуровано формувати повідомлення з вимогою 11 UA 99266 C2 5 10 навігаційних допоміжних даних, яке містить показник часу як показник ефемеридної інформації, отриманої з навігаційного сигналу. 13. Пристрій за п. 9, який призначено для використання сервером навігаційної підтримки і в якому навігаційний допоміжний модуль конфігуровано надавати більш недавню ефемеридну інформацію у відповідь на вимогу навігаційних допоміжних даних від мобільної станції, базуючись на порівнянні показника часу з показником часу, включеним у вимогу навігаційних допоміжних даних. 14. Пристрій за п. 9, який виконаний як спеціалізована мікросхема. 15. Машинозчитуваний носій, який містить комп'ютерний програмний код, що призначений для виконання процесором інструкцій для здійснення способу за пп. 1-8. 12 UA 99266 C2 13 UA 99266 C2 14 UA 99266 C2 Комп’ютерна верстка Л. Купенко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 15
ДивитисяДодаткова інформація
Назва патенту англійськоюTime-based ephemeris identity in assistance data and assistance data request messages
Автори англійськоюSYRJARINNE JARI, Galivaara Ismo
Назва патенту російськоюИдентификация базирующихся на времени эфемерид во вспомогательных данных и сообщениях с требованием вспомогательных данных
Автори російськоюСирьяринне Яри, Галиваара Исмо
МПК / Мітки
МПК: G01S 1/00
Мітки: повідомленнях, часі, ефемерид, допоміжних, базованих, вимогою, даних, ідентифікація
Код посилання
<a href="https://ua.patents.su/17-99266-identifikaciya-bazovanikh-na-chasi-efemerid-u-dopomizhnikh-danikh-i-povidomlennyakh-z-vimogoyu-dopomizhnikh-danikh.html" target="_blank" rel="follow" title="База патентів України">Ідентифікація базованих на часі ефемерид у допоміжних даних і повідомленнях з вимогою допоміжних даних</a>
Спосіб та пристрій для перевірки трафіка та допоміжних каналів у безпровідній системі передачі даних (варіанти)
Номер патенту: 82317
Опубліковано: 10.04.2008
Автори: Моханті Бібху, Панкадж Раджеш К., Крішнамуртхі Раджив, Бендер Пол Е.
МПК: H04Q 7/22, H04L 12/56, H04B 7/204
Мітки: даних, каналів, безпровідній, перевірки, передачі, системі, допоміжних, трафіка, варіанти, пристрій, спосіб
Формула / Реферат:
1. Спосіб тестування множини каналів, зв’язаних з прямою лінією у системі безпровідної передачі даних, який полягає у тому, щоприймають перше повідомлення, що має включені у нього тестові установки для щонайменше одного з каналів трафіка, допоміжних каналів або їх комбінації;конфігурують щонайменше один канал на основі тестових установок у першому повідомленні;приймають тестові пакети по прямому каналу...
Спосіб керування доступом станції даних до мобільних носіїв даних, мобільний носій даних, станція даних і система для здійснення способу
Номер патенту: 46781
Опубліковано: 17.06.2002
Автор: Райнер Роберт
МПК: G06K 19/07, G06K 7/00, G06K 17/00, H04L 12/407
Мітки: станції, система, способу, мобільних, доступом, мобільній, станція, здійснення, спосіб, носій, керування, носіїв, даних
Формула / Реферат:
1. Спосіб керування доступом станції даних (61) до щонайменше двох мобільних носіїв даних (51), при якому ці носії даних на вимогу станції даних синхронно передають свої ідентифікаційні номери, і станція даних визначає, чи приймаються щонайменше в одному двійковому розряді прийнятих ідентифікаційних номерів два різних значення біта, і потім, якщо принаймні в одному двійковому розряді прийнятих ідентифікаційних номерів будуть визначені як...
Спосіб придбання електронних даних із застосуванням носія даних і відповідний носій даних
Номер патенту: 55556
Опубліковано: 15.04.2003
Автор: Борн Крістіне
МПК: G07F 17/00, G07F 7/08, G07F 19/00
Мітки: придбання, спосіб, даних, відповідний, електронних, носія, носій, застосуванням
Формула / Реферат:
1. Спосіб придбання електронних даних (D2) із застосуванням носія (1) даних, що містить процесор (2) і запам'ятовуючий пристрій (М1), згідно з яким:- встановлюють зв'язок між носієм (1) даних і розрахунковим пристроєм (3),- передають між процесором (2) носія (1) даних і розрахунковим пристроєм (3) інформацію (D1) стосовно операції оплати, яка має бути здійснена у зв'язку з придбанням даних (D2), внаслідок чого перераховується...
Виявлення dtx, коли ack/nack передається з вимогою диспетчеризації
Номер патенту: 98202
Опубліковано: 25.04.2012
Автори: Голі Карі Югані, Тірола Еса Тапані, Ліндгольм Ярі Олаві, Пайокоскі Карі Пекка
Мітки: диспетчеризації, колії, передається, виявлення, вимогою
Формула / Реферат:
1. Спосіб передачі повідомлення у субкадрі, який включає:формування повідомлення, що включає першу індикацію вимоги диспетчеризації;визначення, чи має бути друга індикація передана в одному субкадрі з першою індикацією, де друга індикація вказує, що призначення ресурсу низхідного каналу було успішним і кожне щонайменше одне відповідне кодове слова було виявлене правильно;у відповідь на визначення, що друга індикація не...
Спосіб контролю та споживання даних єдиної реєстраційної бази даних громадян
Номер патенту: 60435
Опубліковано: 25.06.2011
Автори: Кисельова Людмила Миколаївна, Толстих Віктор Костянтинович
МПК: G06F 17/40, G06Q 90/00
Мітки: базі, контролю, реєстраційної, споживання, даних, спосіб, громадян, єдиної
Формула / Реферат:
Спосіб контролю та споживання даних єдиної реєстраційної бази даних громадян, що включає централізоване збереження та обробку реєстраційних даних, створення груп користувачів, створення алгоритмів і методів доступу авторизованих користувачів до реєстраційних даних через мережу Internet, формування аналітичних звітів на основі реєстраційних даних громадян, що зареєстровані в єдиній реєстраційній базі даних, копіювання реєстраційних даних,...
Попередній патент: Спосіб одержання 1,2,4-оксадіазолбензойної кислоти та її похідних (варіанти)
Наступний патент: Прес-форма для первинного формоутворення або пластичної деформації деталей з матеріалів, які піддаються термічному впливу
Випадковий патент: Пневматичний дозатор насіння з внутрішнім приводом