Вертоліт із співвісними гвинтами протилежного обертання без циклічної зміни кроку, оснащений засобами аеродинамічного контролю положення і траєкторії польоту
Формула / Реферат
1. Вертоліт з несучими гвинтами (4, 5) протилежного обертання, який відрізняється тим, що в сукупності складає:
засоби для зміни загального кроку, тобто для одночасної і рівної зміни кута атаки усіх лопатей гвинтів (4, 5); і
засоби керування положенням і напрямом польоту, що створюють відповідні аеродинамічні сили за допомогою повітряного потоку від несучих гвинтів;
причому вказані засоби керування положенням і напрямком польоту містять керуючі поверхні, дві з яких розташовані в задній частині вертольота, причому передбачені рухомі засоби, що призначені для переміщення вказаних керуючих поверхонь симетрично або асиметрично відносно одна до одної для забезпечення нахилу або руху по тангажу всього вертольота.
2. Вертоліт за п. 1, який відрізняється тим, що вказані гвинти протилежного обертання містять верхній гвинт (4) і нижній гвинт (5), розташовані на одній осі.
3. Вертоліт за будь-яким з пп. 1 або 2, який відрізняється тим, що лопаті гвинтів (4, 5) містять додаткові кінцеві маси обтічної форми, що забезпечують лопатям гвинтів додаткову жорсткість за рахунок відцентрової сили, що розвивається при обертанні, а також що дозволяють гвинтам накопичувати більшу кількість кінетичної енергії, використовуваної в можливих критичних умовах польоту і, зокрема, при маневруванні в режимі авторотації.
4. Вертоліт за п. 1, який відрізняється тим, що вказаних керуючих поверхонь або елеронів (1, 2, 3) переважно щонайменше три.
5. Вертоліт за п. 4, який відрізняється тим, що два елерони (2, 3) розташовані в задній частині фюзеляжу, симетрично відносно подовжній осі машини, причому їх відповідні осі обертання лежать в горизонтальній площині, що проходить через центр тяжіння вертольота, а третій елерон (1) розташований в носовій частині, зокрема, на подовжній осі вертольота, при цьому він має власну вісь обертання, що лежить в горизонтальній площині, що проходить через центр тяжіння машини; причому два бічні задні елерони (2, 3) виконано з можливістю керованого зміщення пілотом з використанням відомої основної ручки (8) управління, що виконує виключно вказану функцію, а перший елерон (1) виконаний з можливістю управління пілотом з використанням педалей (10, 11), що виконують тільки цю конкретну функцію.
6. Вертоліт за п. 1, який відрізняється тим, що вказані засоби зміни загального кроку містять важіль (9) керування загальним кроком, виконує виключно функцію одночасної і рівної зміни кута атаки лопатей обох несучих гвинтів.
7. Вертоліт за п. 1, який відрізняється тим, що містить щонайменше: один двигун, одну трансмісію і роз'єднувальний ланцюг, передбачений між двигуном і валами для керування гвинтами, а також один ланцюг шестерень редуктора, що міняє напрям обертання співвісних валів, по суті відомих і таких, що мають характеристики, властиві відомим вертольотам з двома співвісними гвинтами протилежного обертання.
8. Вертоліт за п. 1, який відрізняється тим, що передбачено три елерони (1, 2, 3), розташованих під гвинтами (4, 5), в горизонтальній площині, паралельній фіксованій площині обертання гвинтів і такій, що проходить через центр тяжіння вертольота; причому в умовах стабільного польоту, у фіксованій точці хорда крила вказаних елеронів паралельна осі обертання гвинтів (4, 5) або, іншими словами, перпендикулярна площині їх обертання.
9. Вертоліт за п. 2, який відрізняється тим, що вказані засоби зміни загального кроку містять вузол для керування системою гвинтів, містить дві пластини (27, 31), що обертаються, але не коливаються, призначені для зміни нахилу лопатей гвинтів (4, 5), відповідним чином встановлених на втулці гвинта.
10. Вертоліт за п. 9, який відрізняється тим, що кінематичний ланцюг керування загальним кроком є прямим або з передбаченим сервоприводом відомого типу, причому він починається від важеля (9) керування загальним кроком, встановленого з можливістю руху вгору або вниз, причому вказаний важіль (9) нерухомо закріплений відносно важеля (12), призначеного для переміщення рульової тяги (13), що приводить в обертальний рух прямокутний важіль трансмісії або L-подібний важіль (15), встановлений з можливістю обертання на вісь (16) і керуючий шарнірною рульовою тягою (17), встановлений з можливістю осьового руху вгору або вниз для керування переміщення вгору або вниз контрольної втулки (18), обладнаний двома підшипниками (19, 20), що обертаються на нижньому фланці (21), нерухомо закріплений відносно циліндричного тіла (22); причому циліндричне тіло або рукав (22) виконане з можливістю осьового ковзання на зовнішньому співвісному валу (23) і фіксованого обертання відносно указаного вала, оскільки його приводить в рух спеціальна поздовжня тяга (24, 25), нерухомо закріплена відносно рукава (22).
11. Вертоліт за п. 10, який відрізняється тим, що вказані поздовжні тяги (24, 25) встановлені з можливістю проходження через втулку (26) нижнього гвинта (5), жорстко закріпленого на зовнішньому валу (23), причому вони ковзають усередині вказаної втулки (26) в осьовому напрямку і наводяться в рух при її обертанні.
12. Вертоліт за п. 11, який відрізняється тим, що містить диск (27), що не коливається, жорстко закріплений на рукаві (22) з можливістю повторення як його обертального руху, що керується валом (23) за допомогою тяг (24, 25) через втулку (26), так і його осьового руху, що керується контрольною втулкою (18), і також того, що передається на рукав (22).
13. Вертоліт за п. 12, який відрізняється тим, що на диску або пластині (27) шарнірно закріплені рульові тяги (28, 29), що переміщають задні кромки відповідних лопатей нижнього гвинта (5), сполучених з ними, і що обертаються синхронно з пластиною (27), оскільки їх обертає, хоча і побічно, вказаний зовнішній вал (23).
14. Вертоліт за п. 13, який відрізняється тим, що лопаті нижнього гвинта (5) встановлені на валах, що сполучають їх з втулкою (26), і при цьому мають тільки один ступінь свободи, а саме, ступінь свободи, що забезпечує можливість зміни їх загального кроку; причому функції рульових тяг (28, 29) полягатимуть тільки в передачі задній кромці відповідної лопаті поступального ходу від диска (27) і, таким чином, у відповідній зміні кута атаки кожній з лопатей гвинта (5).
15. Вертоліт за п. 10, який відрізняється тим, що вказані поздовжні тяги (24, 25) передають власний поступальний рух, зміни кроку також і на верхній гвинт (4), встановлений співвісно відносно нижнього гвинта (5), і що обертається в протилежному до нього напрямку.
16. Вертоліт за п. 15, який відрізняється тим, що вказані тяги (24, 25) передають власні осьові рухи на внутрішній диск (30) зовнішнього кільця (31), що обертається в напрямку, протилежному до напрямку обертання диска (30) за рахунок розчеплення, що здійснюється спеціальним упорним підшипником (33), причому внутрішній диск (30) і зовнішнє кільце (31) не коливаються.
17. Вертоліт за п. 16, який відрізняється тим, що внутрішній вал (32) встановлений з можливістю обертання усередині вказаного диска (30) в протилежному до нього напрямку без якої-небудь взаємної механічної дії; в результаті, зовнішнє кільце або пластина (31) завжди здійснює той же самий поступальний рух, що нижній фланець (21).
18. Вертоліт за п. 17, який відрізняється тим, що на пластині (31), що обертається, шарнірно закріплені рульові тяги (34, 35) для верхнього гвинта (4), приведені в рух диском (27), що не коливається, жорстко закріпленим на рукаві (22) з можливістю повторення його обертального і осьового руху, що призводить до аналогічного зміщення задньої кромки лопатей верхнього гвинта (4), встановленого співвісно відносно нижнього гвинта (5), і що обертається в протилежному йому напрямку.
19. Вертоліт за п. 5, який відрізняється тим, що керування кутом крену здійснюють два задні елерони (2, 3), поточне положення яких визначає пілот, переміщаючи ручку (8) керування, через спеціальний кінематичний ланцюг керування безпосередньо і з використанням сервоприводів відомого типу.
20. Вертоліт за п. 19, який відрізняється тим, що рух, переданий пілотом на ручку (8) керування, доходить до елеронів (2, 3) через два дзеркальні кінематичні ланцюги керування, приведені в рух ручкою (8), нерухомо закріпленою відносно вертикального L-подібного кронштейна (36), на якому за допомогою короткого вала, що проходить через горизонтальний С-подібний кронштейн (37), встановлено центральне конічне зубчасте колесо (38), що знаходиться у безперервному зачепленні з двома іншими бічними конічними зубчастими колесами, співвісними і протиставленими одне одному: правим колесом (39) і лівим колесом (40); що дозволяє повертати ручку (8) вперед/назад навколо осі обертання двох бічних конічних зубчастих коліс (39, 40), правого і лівого, навколо осі центрального конічного зубчастого колеса (38).
21. Вертоліт за п. 20, який відрізняється тим, що бічні конічні зубчасті колеса (39, 40) закріплені на одному кінці правої півосі (41) і лівої півосі (42) відповідно, причому їх зчеплення з центральним конічним зубчастим колесом (38) забезпечене вказаним С-подібним кронштейном (37); при цьому дві півосі (41, 42) встановлені з можливістю обертання відносно опори (37) і, у свою чергу, жорстко сполучені із зовнішніми конічними зубчастими колесами (43, 44).
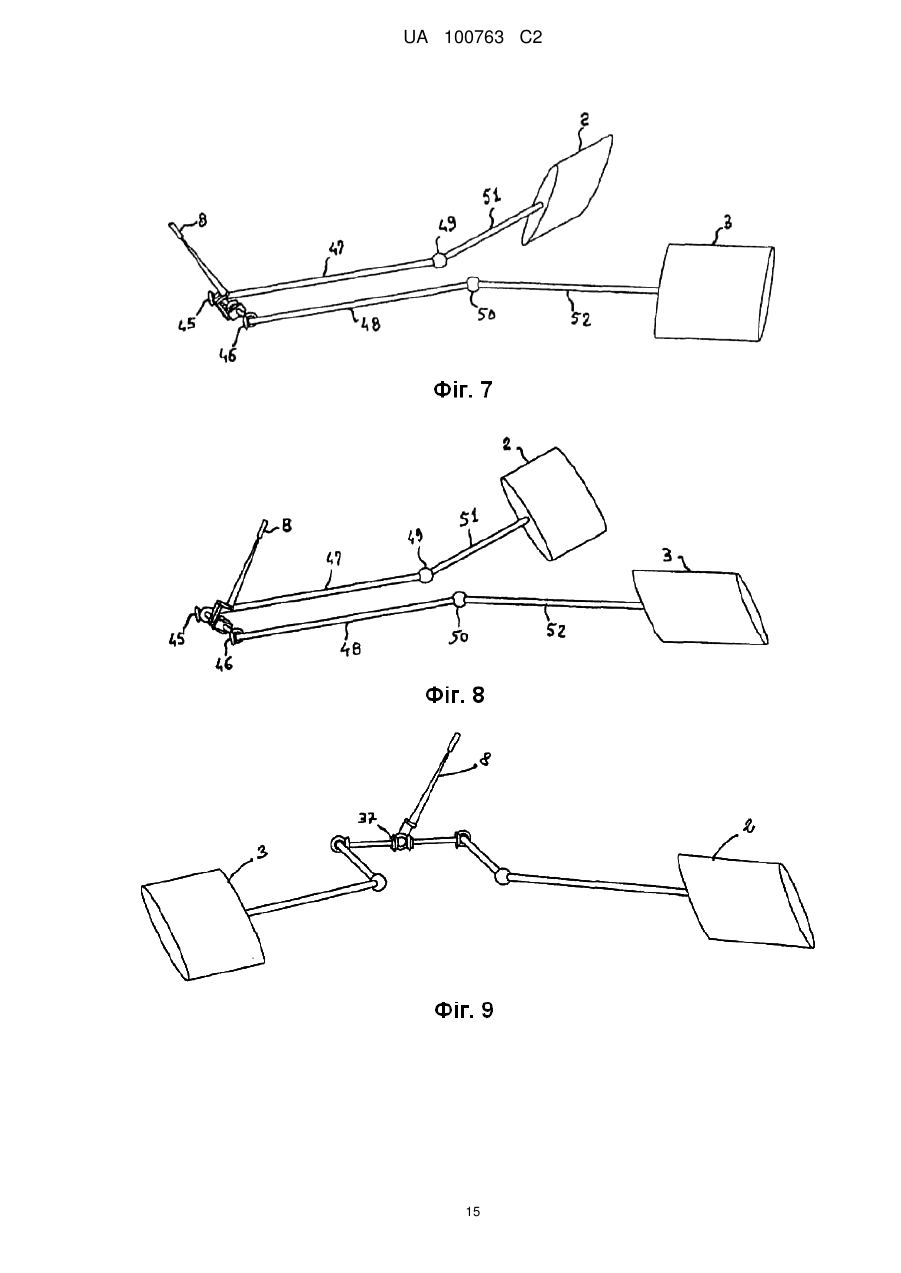
22. Вертоліт за п. 21, який відрізняється тим, що вказані зовнішні зубчасті колеса (43, 44), у свою чергу, приводять в рух трансмісійні конічні зубчасті колеса (45, 46), з якими вони зчеплені і які керують подовжньою тягою (47, 48) відповідно, які через синхронні кардани (49, 50) і додаткові трансмісійні тяги (51, 52) передають рухи, що здійснюються головною ручкою (8) до правого елерона (2) і лівого елерона (3), відповідно.
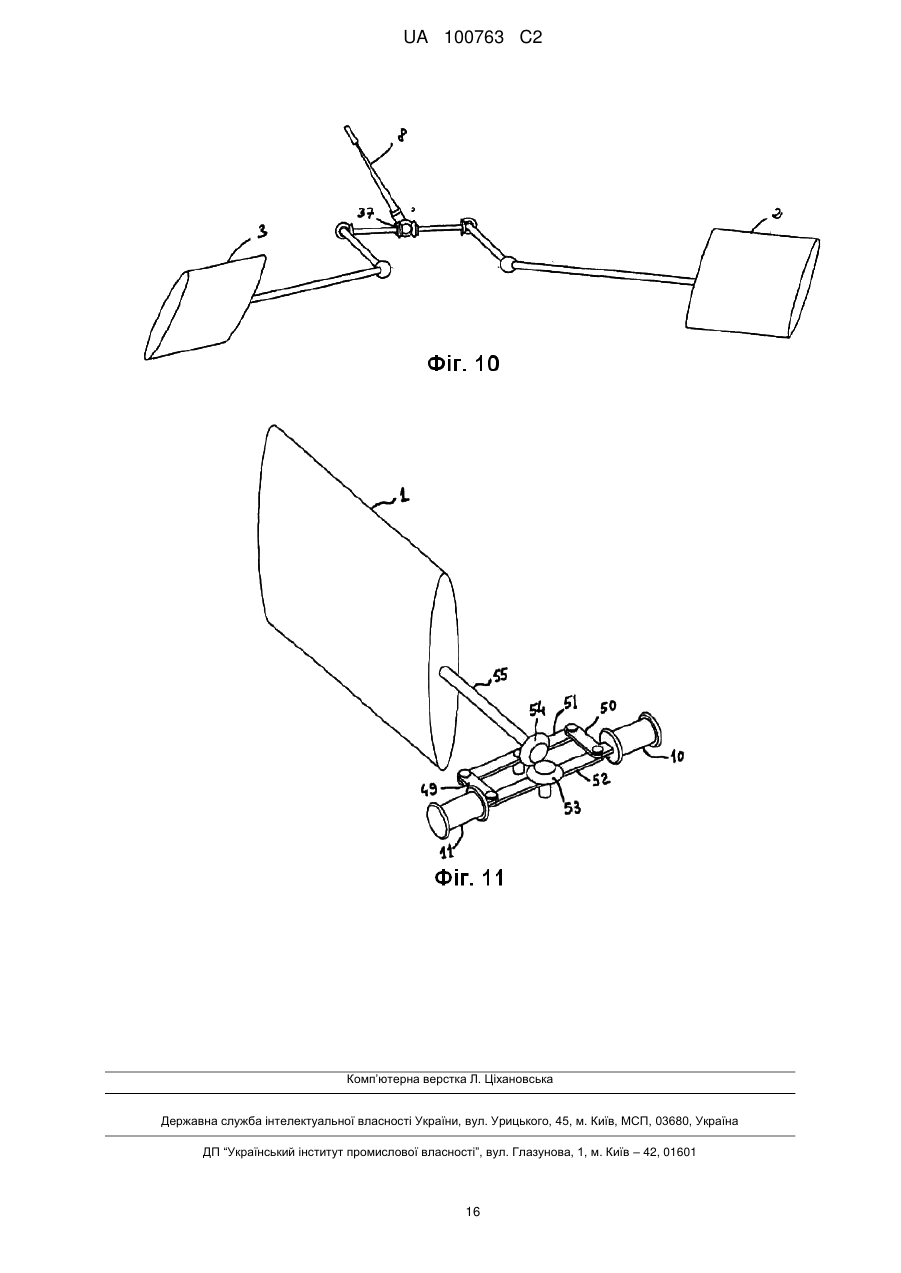
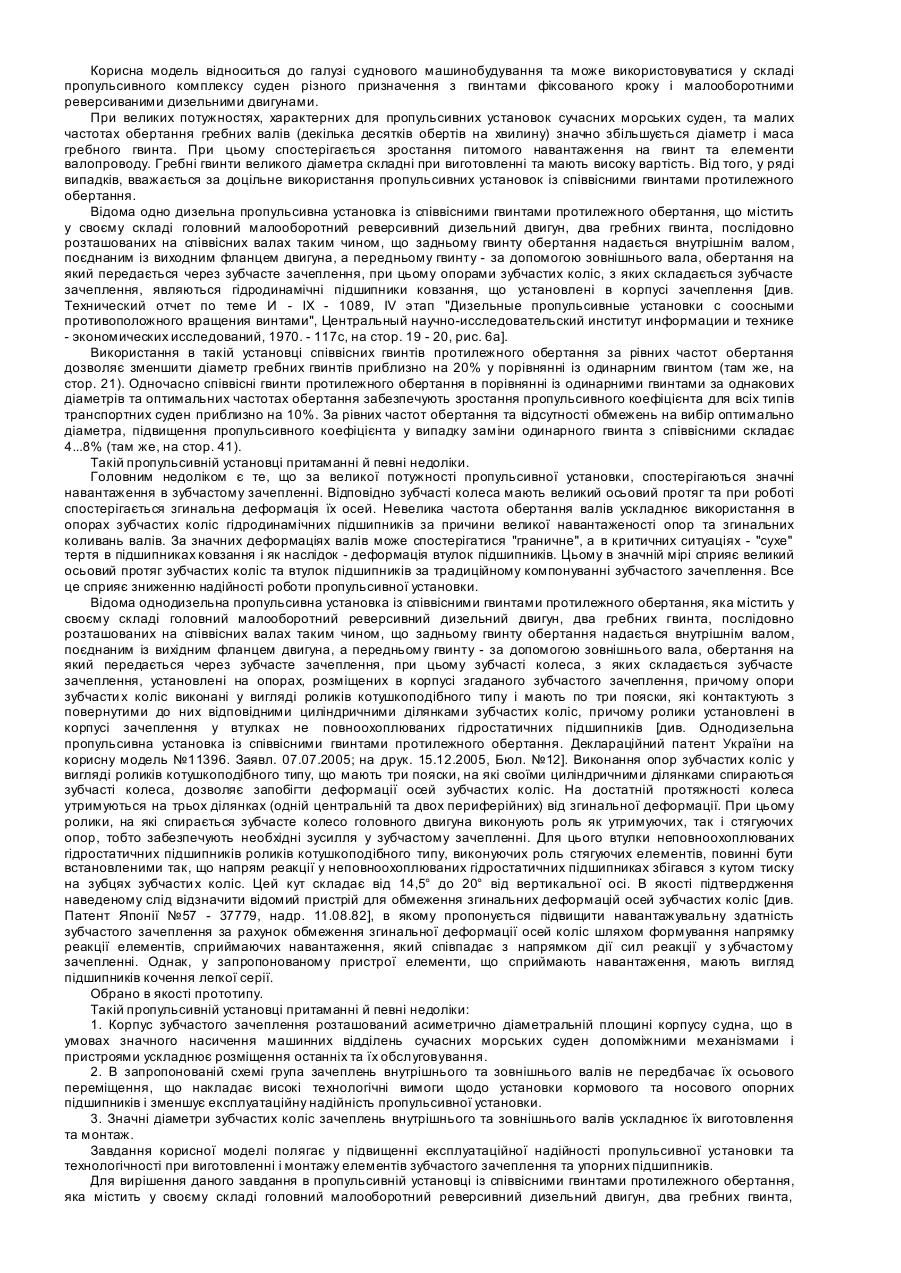
23. Вертоліт за п. 5, який відрізняється тим, що керування положенням, обертання, тільки переднього елерона (1) здійснює механізм керування комплектом педалей, що містить дві педалі, права педаль (10) і ліва педаль (11), на які пілот натискає ногами; причому педалі з відповідними L-подібними кронштейнами (49, 50) разом з поперечними важелями (51, 52) утворюють частину паралелепіпеда пантографа.
24. Вертоліт за п. 23, який відрізняється тим, що передбачене центральне конічне зубчасте колесо (53), закріплене на важелі (52) і конічне зубчасте колесо (54), що приводить в рух, і вал (55) для обертання переднього елерона (1), жорстко сполученого з ним; вказаний ланцюг керування є простим і/або з передбаченим сервоприводом відомого типу.
25. Вертоліт за п. 24, який відрізняється тим, що, коли праву педаль (10) штовхають вперед, верхня передня кромка переднього елерона (1) нахиляється управо, а коли ліву педаль (11) штовхають вперед, верхня передня кромка переднього елерона (1) нахиляється вліво; причому, якщо ручку (8) утримують в центрі, машина обертається навколо своєї вертикальної осі убік, в якій знаходиться педаль, що натискається.
26. Вертоліт за будь-яким з пп. 1 або 2, який відрізняється тим, що вказані засоби зміни загального кроку призначені для виконання одночасної і загальної зміни кута атаки усіх лопатей гвинтів (4, 5), який для позитивного кута атаки передніх кромок досягає значень, що перевищують або рівні 12°, а для негативного кута атаки передніх кромок складає більше 45°; що забезпечене просто за рахунок керування переміщенням тільки двох співвісних пластин (27, 30) протилежного обертання, що не коливаються і утворюють частину елемента, що обертається, розташованого поблизу гвинтів і виконаного з можливістю ковзання на відповідних валах за допомогою передач, що відходять безпосередньо або за допомогою сервоприводів відомого типу, від важеля керування (9) загальним кроком і діючих синхронно на кожну лопать гвинта для зміни кута атаки лопатей гвинтів.
Текст
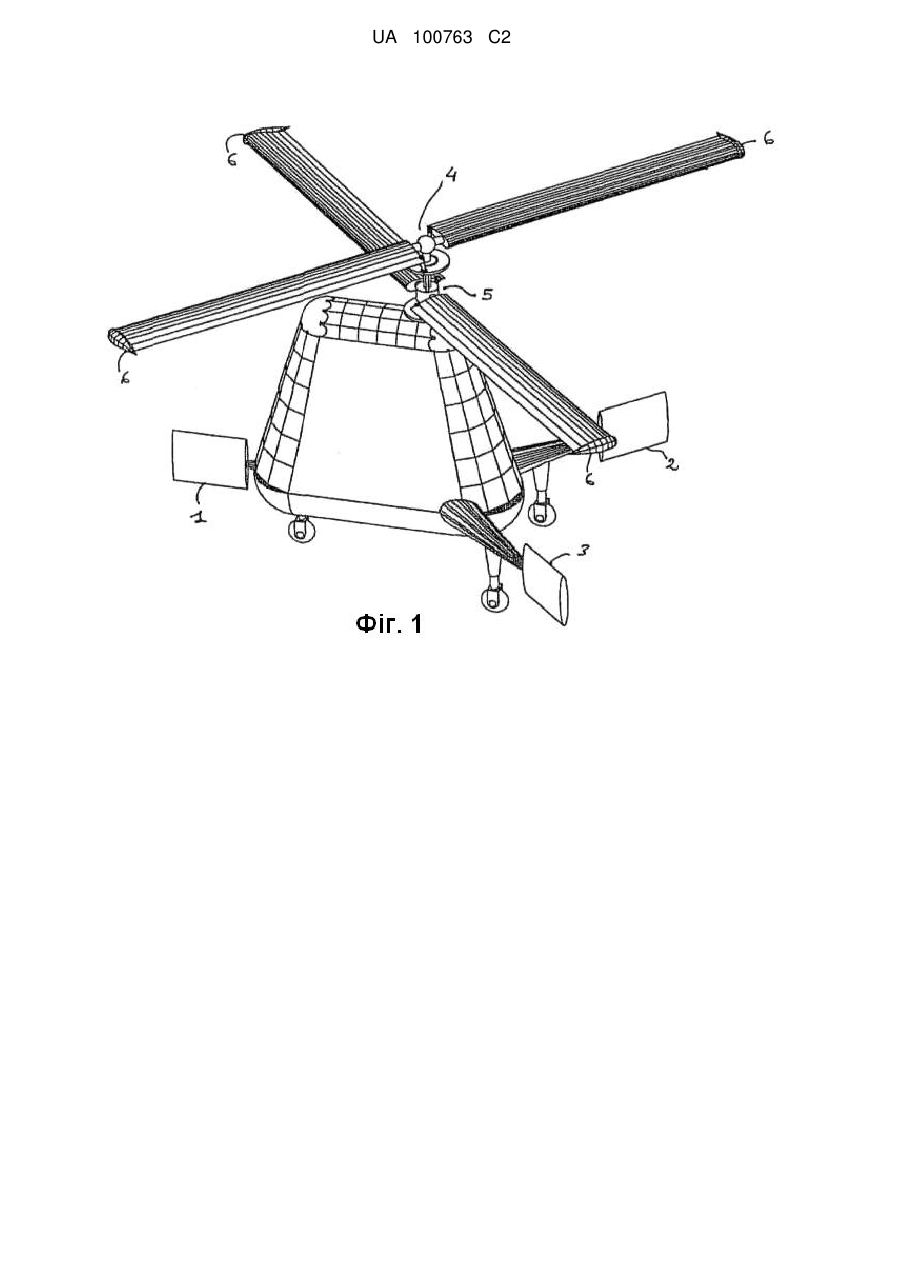
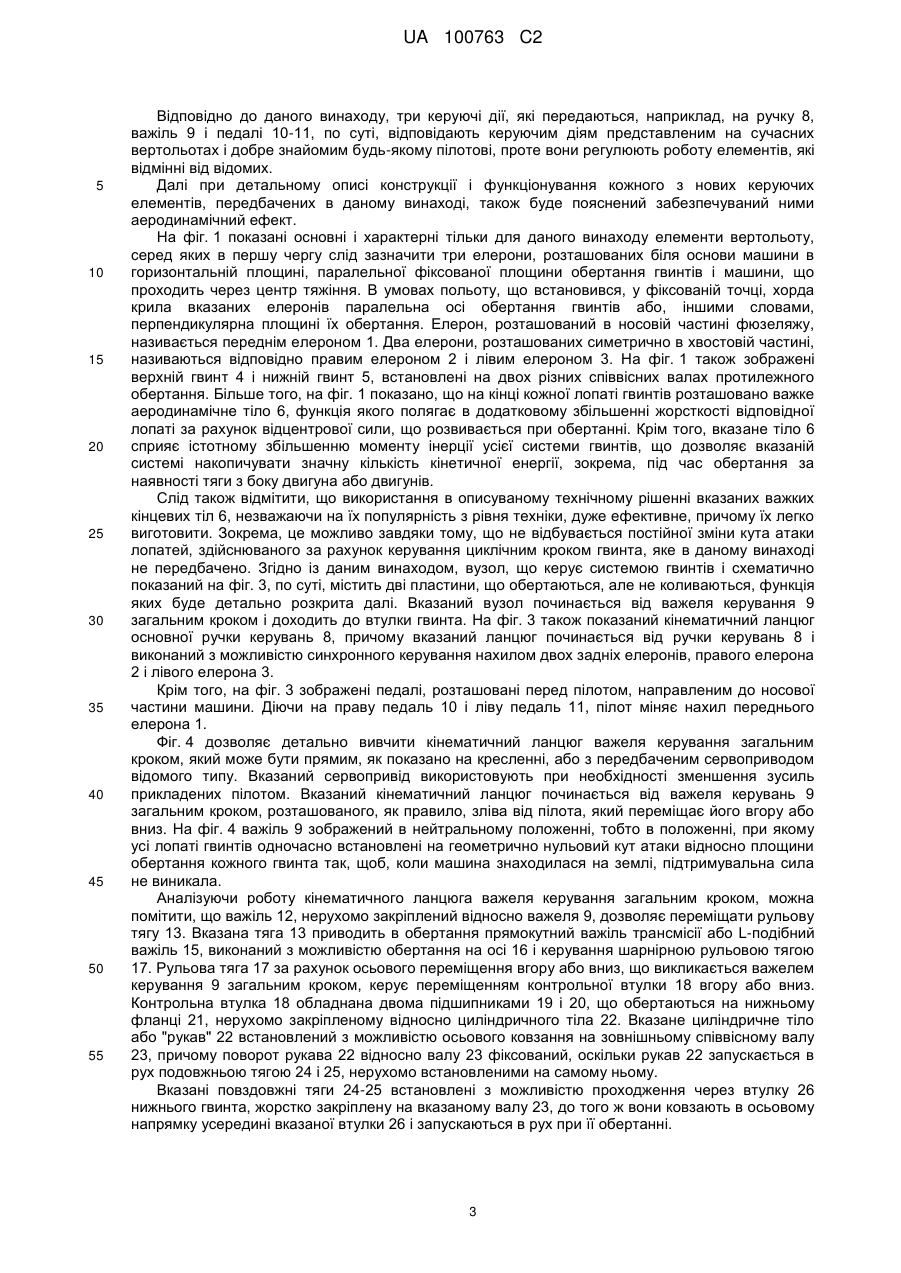
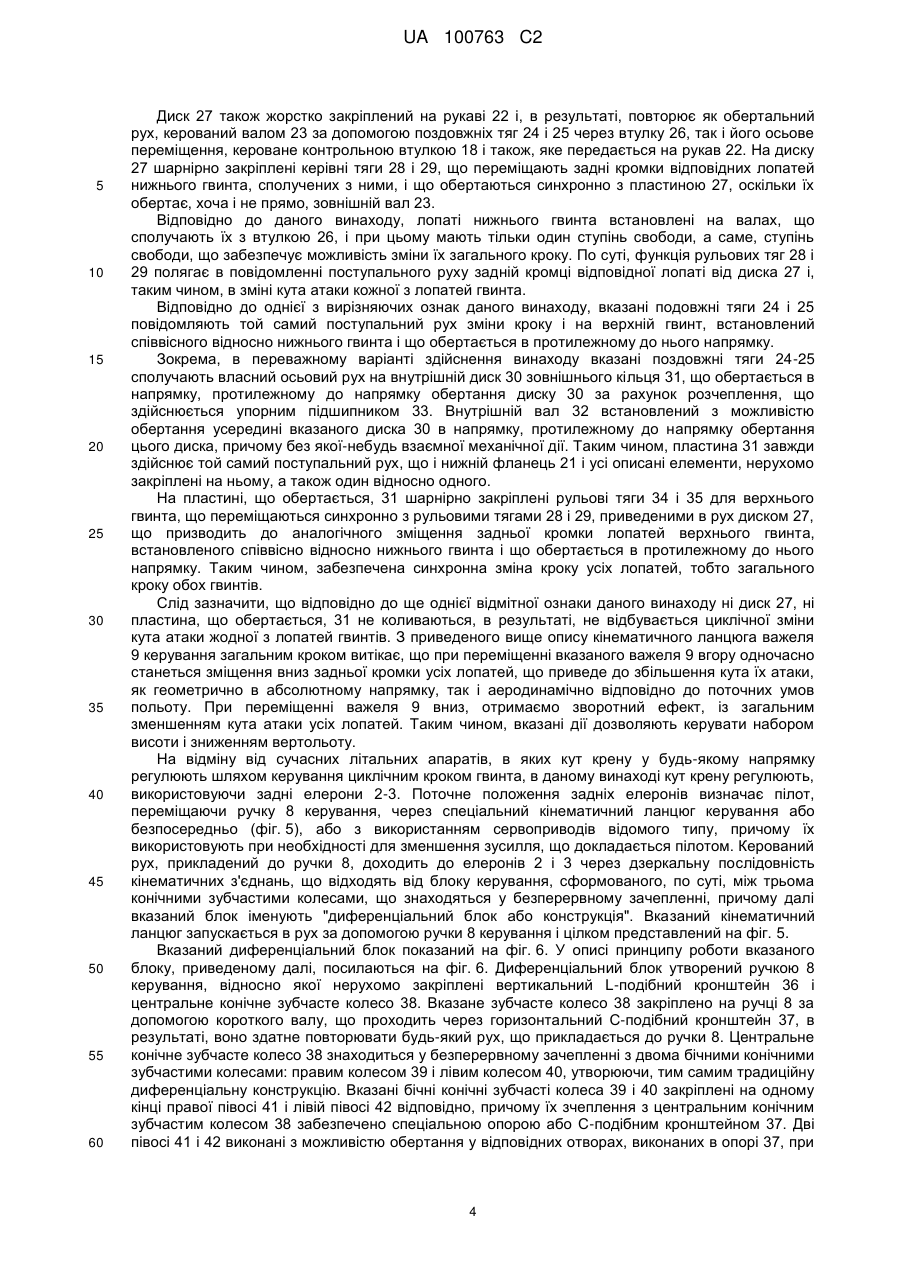
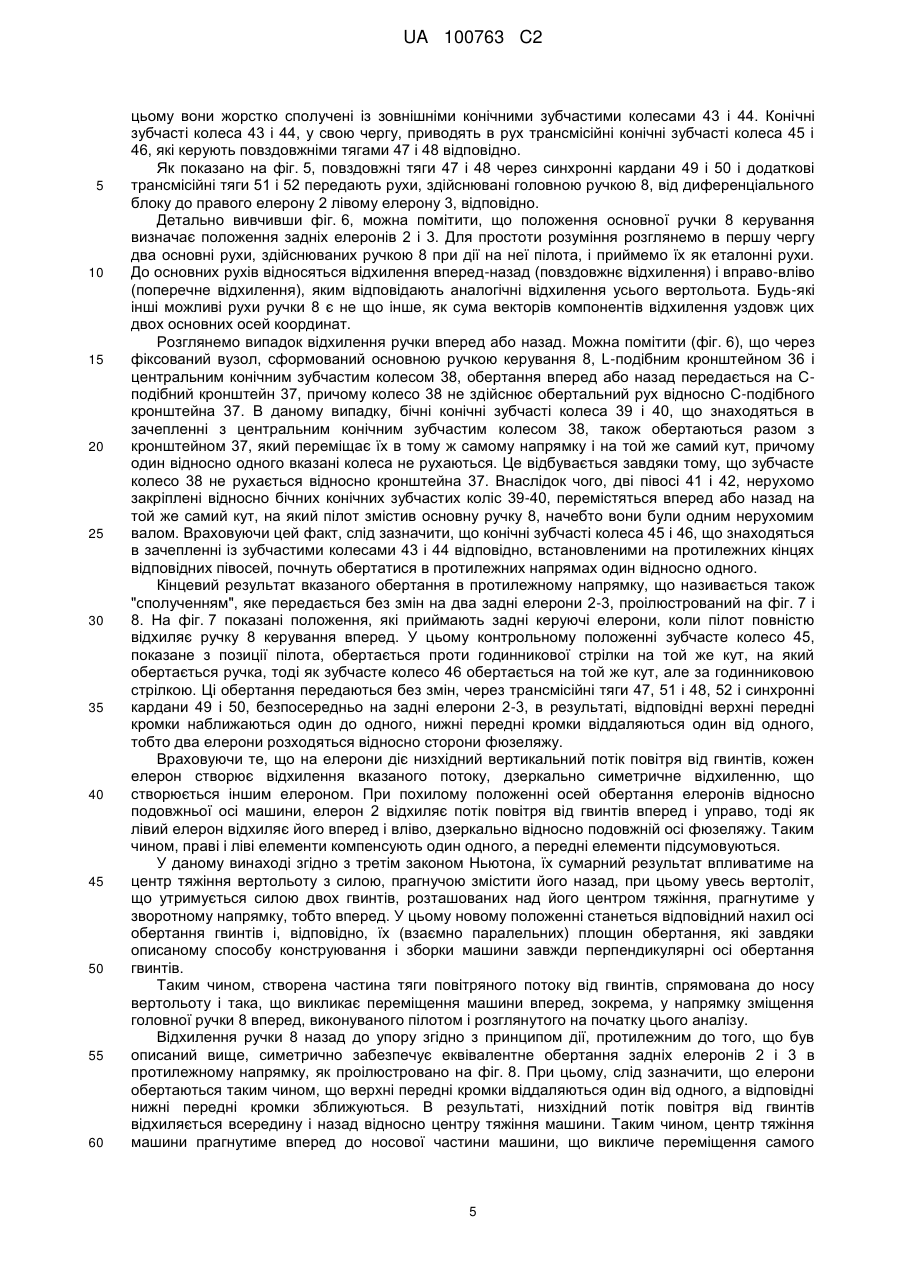
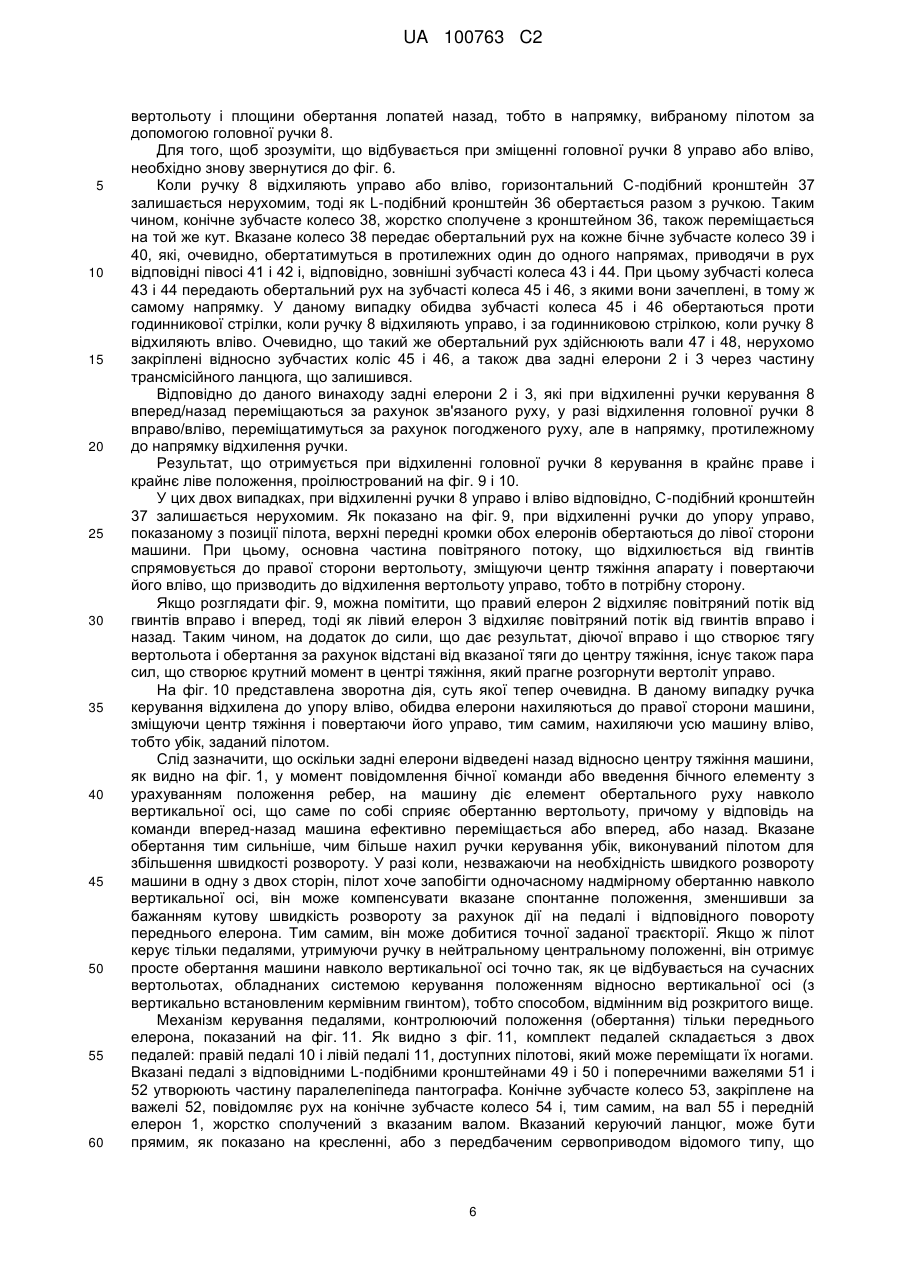
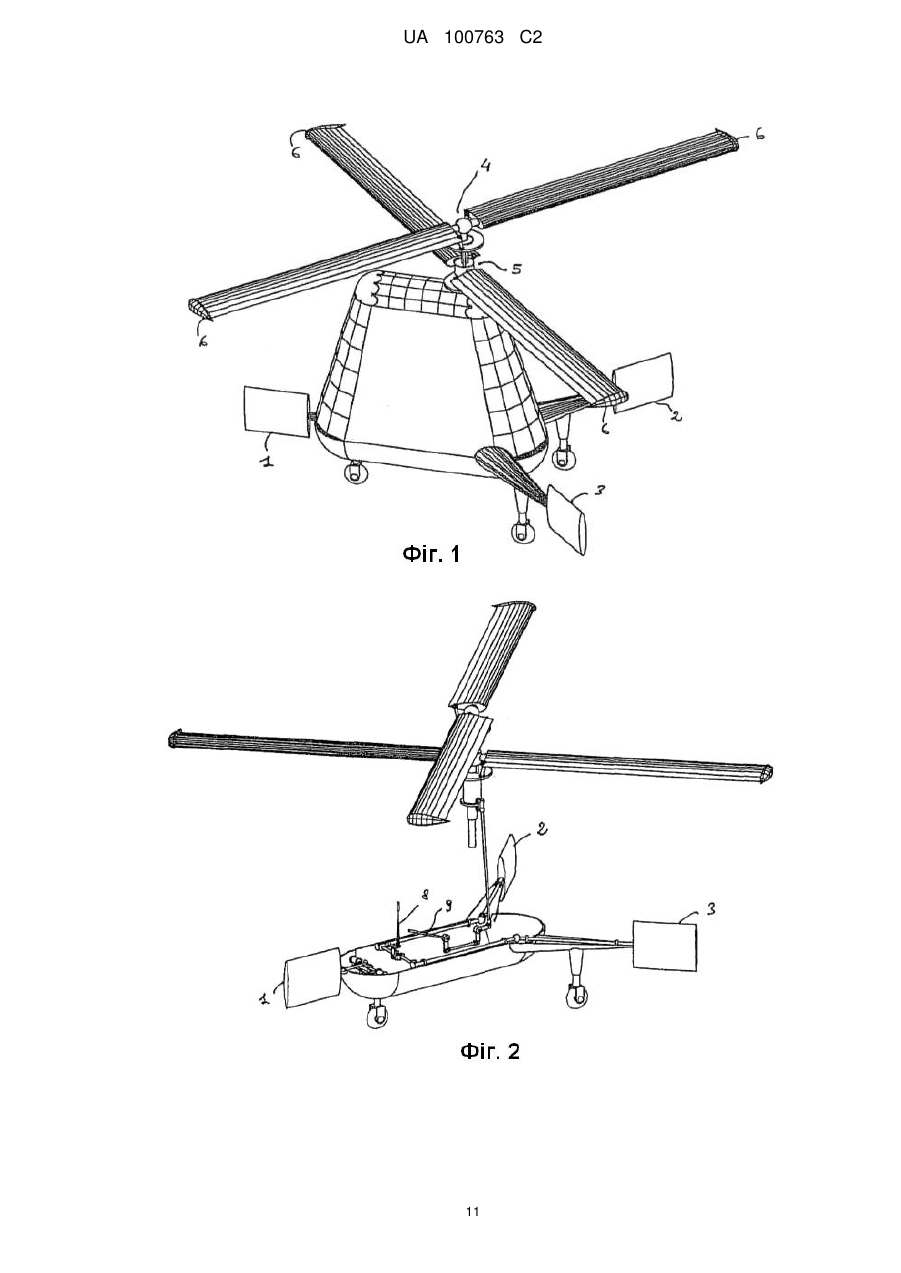
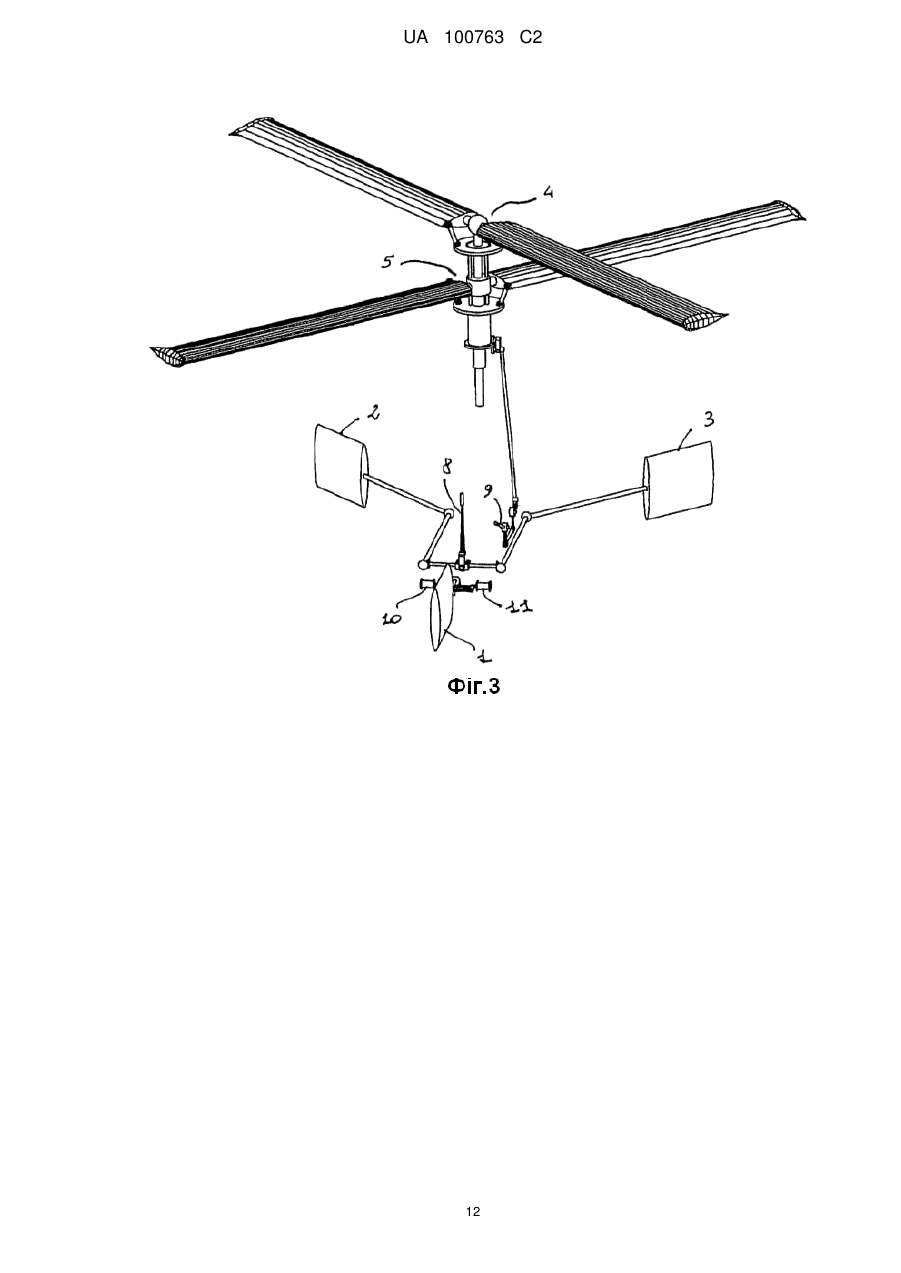
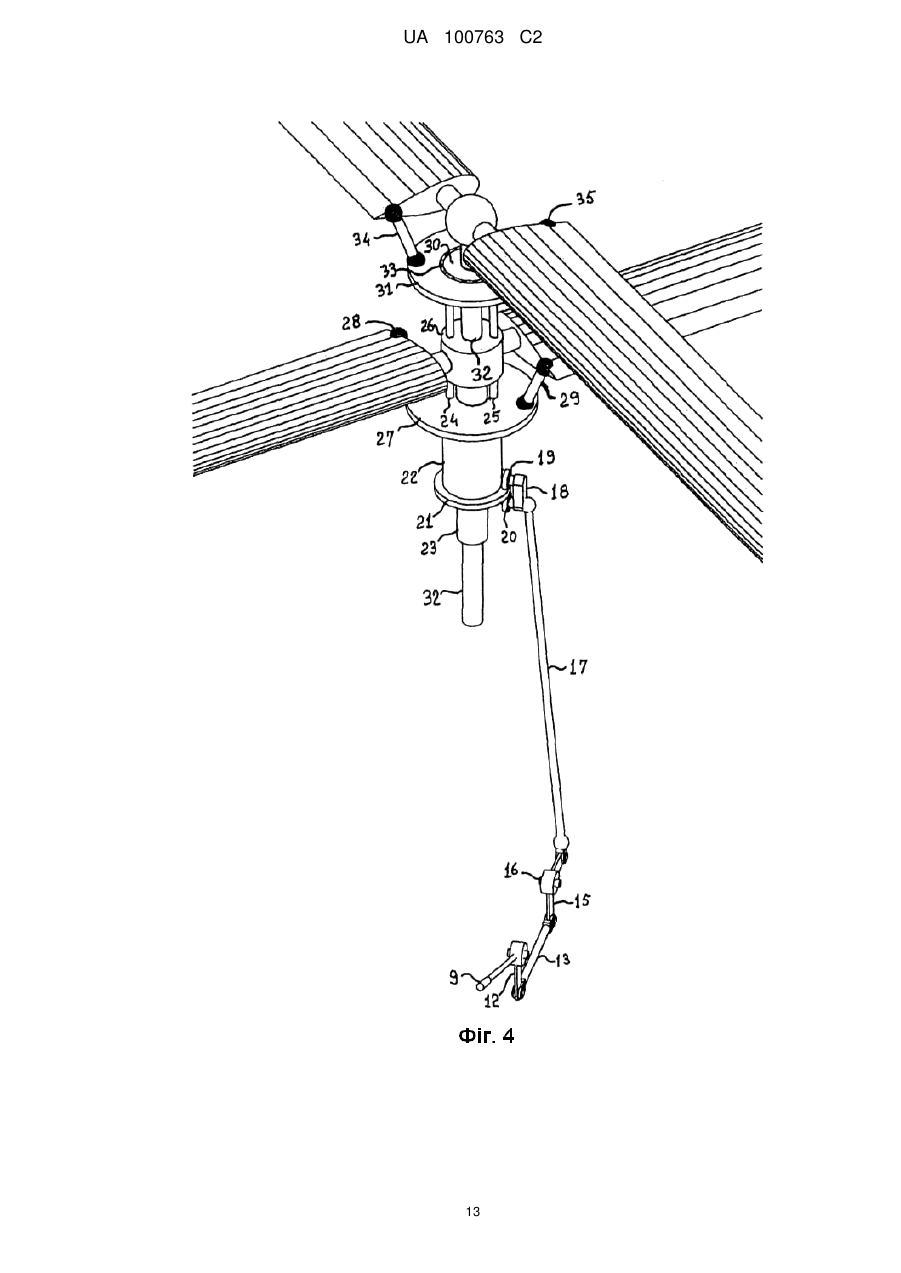
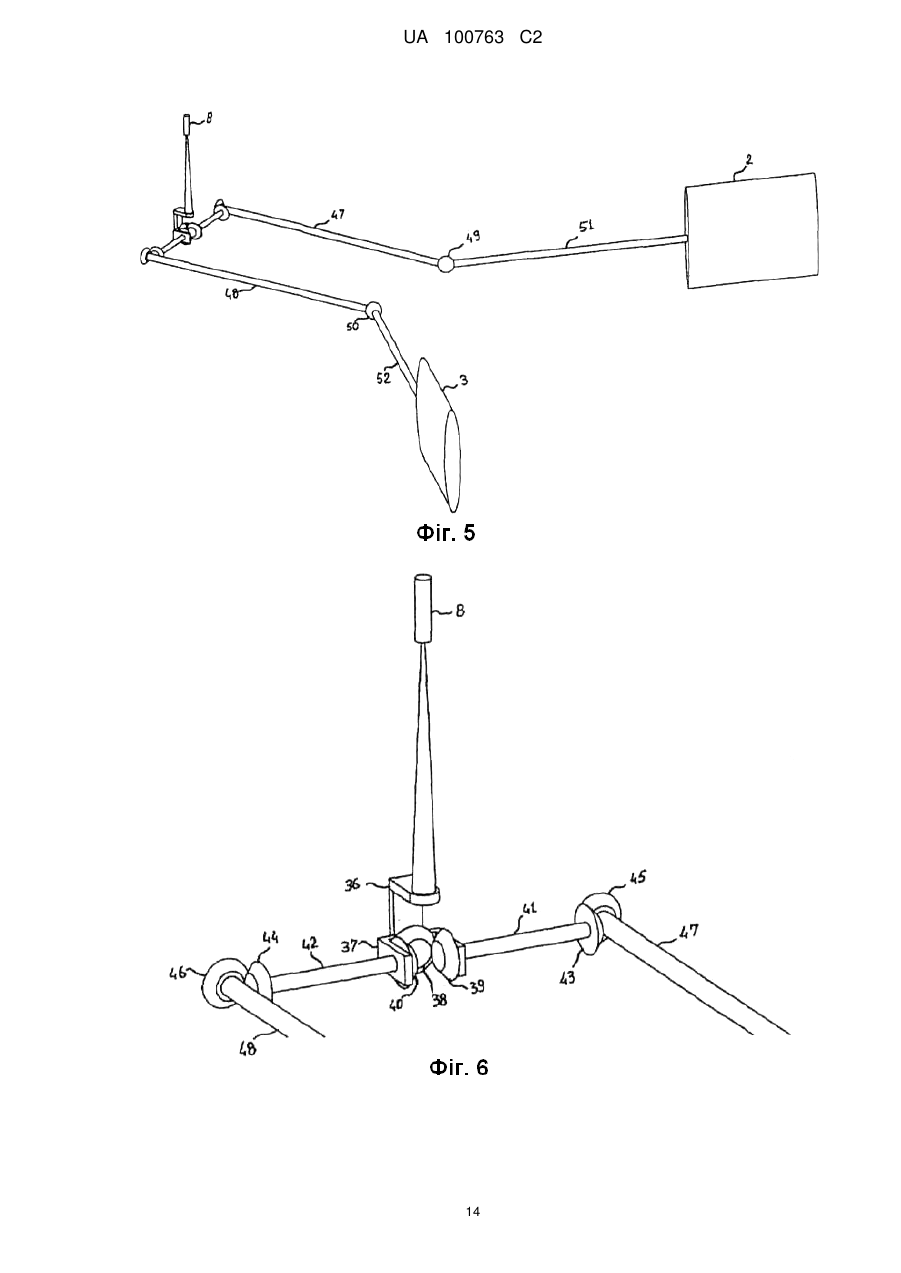
Реферат: Запропонований вертоліт з переважно співвісними несучими гвинтами протилежного обертання містить: засоби для зміни загального кроку, тобто для одночасної і рівної зміни кута атаки усіх лопатей вказаних гвинтів; засоби керування положенням і напрямом польоту, які створюють відповідні аеродинамічні сили за допомогою повітряного потоку від несучих гвинтів, і засоби, що виключають необхідність, для зміни циклічного кроку лопатей гвинтів. UA 100763 C2 (12) UA 100763 C2 UA 100763 C2 5 10 15 20 25 30 35 40 45 50 55 У сфері вертолітобудування відома схема із співвісними гвинтами протилежного обертання, виконаними окремо і співвісно один одному, яка передувала одногвинтовій схемі з повітряним гвинтом, призначеним для урівноваження реактивного моменту несучого гвинта, і розміщеним ззаду на спеціальній опорній або хвостовій балці. Відомо також, що згодом вказана одногвинтова схема отримала широке поширення і досі є переважаючою за кількістю зроблених зразків, попри те, що схема із співвісними гвинтами має значні переваги в порівнянні з одногвинтовою схемою. Зокрема, вона забезпечує велику аеродинамічну ефективність, менші перешкоди в горизонтальній площині зони гвинта, і велику маневреність машини. Вертоліт з співвісними гвинтами протилежного обертання розкритий, наприклад, в документі US 3135481, 02.06.1964. Однак вказаний відомий вертоліт, як і інші, подібні вертольоти мають певні недоліки, що перешкоджають поширенню схеми з гвинтами протилежного обертання і, зокрема, схеми із співвісними гвинтами. Одним з головних недоліків співвісних гвинтів протилежного обертання, відомих з рівня техніки, є значна складність елементів гвинта, призначених для керування лопатями, зокрема, для передачі змін циклічного керування кроком на два гвинти, а також необхідність, у разі відсутності рульового гвинта, забезпечити керування обертанням машини навколо вертикальної осі за допомогою пристосувань, що дозволяють змінювати тягу одного несучого гвинта, відносно тяги іншого несучого гвинта. Вказані пристосування надзвичайно трудомісткі і складні, оскільки вони призначені для розділення швидкості обертання і/або кута атаки і/або аеродинамічного опору лопатей одного гвинта відносно лопатей іншого гвинта. Одне з основних завдань даного винаходу, який докорінно спростовує традиційний концептуальний підхід до роботи вертольота, полягає в усуненні описаних вище недоліків шляхом виключення вказаних негативних чинників, максимального спрощення конструкції машини, збільшення механічної і експлуатаційної надійності машини за рахунок спрощення конструкції рухливих елементів і значного зниження механічних і аеродинамічних навантажень, діючих на машину, а також усунення критичних аспектів певних маневрів, що буде детальніше розкрито далі. Слід зазначити, що в даному рівні техніки в області вертолітобудування, незмінно застосовується філософія, згідно якої систему гвинтів використовують для створення одночасно усіх сил, необхідних для утримання машини у польоті і забезпечення її зміщення у будь-якому необхідному напрямку. Нині остання з вказаних функцій забезпечується за допомогою відомої системи циклічної зміни кроку лопатей. Для цього лопаті гвинта слід виготовляти так, щоб вони мали легку конструкцію, що забезпечує можливість швидкої зміни їх кроку на кожному повороті гвинта, зокрема, при поступальному ходові машини, в результаті, лопаті випробовують те, що можна назвати не інакше, як вібраційне "зношування", яке є повздовжнім і скручуючим. Впродовж вже декількох років робляться спроби усунути вказану безперервну механічну напругу, що діє на лопаті гвинта, шляхом створення на кожній лопаті невеликих ребер активної компенсації, автоматичне переміщення яких призводить до зменшення вібрацій за рахунок докладання аеродинамічних зусиль, локалізованих у відповідних точках уздовж задньої кромки самих лопатей. Проте очевидно, що цей засіб також призводить до додаткового ускладнення конструкції лопатей через необхідність установки додаткових датчиків і виконавчих механізмів для отримання щонайменше частини необхідних результатів. Ще один відомий недолік полягає в специфічному шумі, що створюється при циклічній зміні кроку при швидкому поступальному польоті вертольота, зокрема, в населених пунктах і на низьких висотах, на додаток до значних і небезпечних вібрацій, що передаються на конструкцію машини і пілотом, що відчувається також, і пасажирами. Інше завдання даного винаходу полягає в тому, щоб усунути усі описані вище недоліки відомих технічних рішень. У рамках даного винаходу вказані завдання вирішені за рахунок застосування інноваційного технічного рішення, в якому система гвинтів виконує виключно єдину функцію підтримки вертольоту, тоді як функцію створення сил, що викликають поступальне переміщення у будьякому напрямку, і функцію керування вказаними силами здійснюють виключно деякі направляючі поверхні, що далі називаються, як "елерони", що прикріплюються до основи фюзеляжу і переміщувані пілотом невеликими і повільними координованими рухами. Згідно з винаходом система гвинтів переважно містить два співвісні гвинти протилежного обертання, оснащені виключно засобами керування загальним кроком і не оснащені засобами керування циклічним кроком. 1 UA 100763 C2 5 10 15 20 25 30 35 40 45 50 55 Даний винахід далі роз'яснюється детальним описом з посиланням на креслення, що додаються, ілюструють виключно в якості прикладу, що не обмежує переважний варіант його здійснення. На кресленнях зображене наступне. На фіг. 1 представлений загальний вигляд вертольота відповідно до можливого варіанту здійснення даного винаходу. На фіг. 2 показано взаємне розташування трьох керівних елементів з інноваційними кінематичними ланцюгами приводу і їх можливе положення усередині фюзеляжу. На фіг. 3 детально зображена конструкція, що відповідає вказаним керуючим елементам. На фіг. 4 детально показаний кінематичний ланцюг, що починається від важеля керування загальним кроком, встановленого в зручному положенні зліва від пілота, який переміщає його лівою рукою, і що завершується спрощеною втулкою гвинта, атаки усіх лопатей, регулюючого кута. На фіг. 5 детально показаний ланцюг керування, який контролює ручка керування, розміщена в зручному положенні перед пілотом, який, як правило, переміщає її правою рукою. На фіг. 6 в масштабі зображені деякі основні механічні елементи, розташовані поблизу ручки керування, які одержують і перетворюють рухи ручки для їх коректної передачі на два задні елерони. На фіг. 7 проілюстрований зв'язок між переміщенням ручки керування вперед (виконане пілотом) і відповідним положенням, що приймається двома задніми елеронами. На фіг. 8 по аналогії з фіг. 7 показаний зв'язок між переміщенням ручки керування назад (виконане пілотом) і відповідним положенням, що приймається двома задніми елеронами; На фіг. 9 проілюстрований зв'язок між переміщенням ручки управо (виконане пілотом) і відповідним положенням, що приймається двома задніми елеронами. На фіг. 10 показаний зв'язок між переміщенням ручки керування вліво (виконане пілотом) і відповідним положенням, що приймається двома задніми елеронами. На фіг. 11 зображений механізм роботи педалей або керма напрямку, розташованих в зручному положенні внизу перед пілотом, який зазвичай керує педалями ногами для контролю положення переднього елерона. Відповідно до однієї з відмітних ознак даного винаходу, співвісні гвинти протилежного обертання не схильні до циклічної зміни кроку. Таким чином, можна збільшити жорсткість конструкції лопатей до максимуму, що допускається технологічними і конструктивними процесами, що застосовуються при їх виготовлені, і більше того, можна обладнати вказані лопаті додатковими кінцевими масами, які окрім забезпечення гвинтам додаткової жорсткості за рахунок відцентрової сили, що розвивається при обертанні, дозволяють гвинтам накопичувати більшу кількість кінетичної енергії, що є дуже корисним при виникненні можливих критичних умов польоту і, зокрема, при маневруванні в режимі авторотації. У даному винаході переважно передбачено, щонайменше, три вище вказані керуючі поверхні або елерони (фіг. 1). Зокрема, два елерони 2 і 3 розташовані в задній частині фюзеляжу, симетрично відносно подовжній осі машини, причому їх відповідні осі обертання лежать в горизонтальній площині, що проходить через центр тяжіння вертольоту. Пілот керує рухом вказаних елеронів, використовуючи відому з рівня техніки ручку керування 8, яка згідно із даним винаходом виконує тільки цю функцію. Третій елерон 1, навпаки, розташований в носовій частині фюзеляжу, зокрема, на подовжній осі вертольота. Він також має власну вісь обертання, що лежить в горизонтальній площині, що проходить через центр тяжіння машини. У дію його приводить пілот, використовуючи педалі 1011, які згідно із даним винаходом виконують тільки вказану конкретну функцію. Крім того, в завдання пілота входить також приведення в дію важеля 9 керування загальним кроком, який показаний на фіг. 2 і3 в аксонометрії разом з усіма наявними в машині кінематичними ланцюгами керування її просторовим положенням. Відповідно до даного винаходу вказаний важіль керування загальним кроком виконує виключно функцію одночасної і рівної зміни кута атаки лопатей обох гвинтів. Як стане очевидно з приведеного нижче опису, ця функція, по суті, аналогічна функції, що виконується в усіх відомих з рівня техніки вертольотах. Проте в даному винаході її виконання значною мірою спрощене. Усі інші елементи вертольота, такі як двигун, трансмісія і роз'єднувальний ланцюг, передбачений між двигуном і валами для керування гвинтами, а також ланцюг шестерень редуктора, що міняє, як правило, напрям обертання співвісних валів, відомі з рівня техніки і мають властивості, характерні для відомих вертольотів з двома співвісними гвинтами протилежного обертання. 2 UA 100763 C2 5 10 15 20 25 30 35 40 45 50 55 Відповідно до даного винаходу, три керуючі дії, які передаються, наприклад, на ручку 8, важіль 9 і педалі 10-11, по суті, відповідають керуючим діям представленим на сучасних вертольотах і добре знайомим будь-якому пілотові, проте вони регулюють роботу елементів, які відмінні від відомих. Далі при детальному описі конструкції і функціонування кожного з нових керуючих елементів, передбачених в даному винаході, також буде пояснений забезпечуваний ними аеродинамічний ефект. На фіг. 1 показані основні і характерні тільки для даного винаходу елементи вертольоту, серед яких в першу чергу слід зазначити три елерони, розташованих біля основи машини в горизонтальній площині, паралельної фіксованої площини обертання гвинтів і машини, що проходить через центр тяжіння. В умовах польоту, що встановився, у фіксованій точці, хорда крила вказаних елеронів паралельна осі обертання гвинтів або, іншими словами, перпендикулярна площині їх обертання. Елерон, розташований в носовій частині фюзеляжу, називається переднім елероном 1. Два елерони, розташованих симетрично в хвостовій частині, називаються відповідно правим елероном 2 і лівим елероном 3. На фіг. 1 також зображені верхній гвинт 4 і нижній гвинт 5, встановлені на двох різних співвісних валах протилежного обертання. Більше того, на фіг. 1 показано, що на кінці кожної лопаті гвинтів розташовано важке аеродинамічне тіло 6, функція якого полягає в додатковому збільшенні жорсткості відповідної лопаті за рахунок відцентрової сили, що розвивається при обертанні. Крім того, вказане тіло 6 сприяє істотному збільшенню моменту інерції усієї системи гвинтів, що дозволяє вказаній системі накопичувати значну кількість кінетичної енергії, зокрема, під час обертання за наявності тяги з боку двигуна або двигунів. Слід також відмітити, що використання в описуваному технічному рішенні вказаних важких кінцевих тіл 6, незважаючи на їх популярність з рівня техніки, дуже ефективне, причому їх легко виготовити. Зокрема, це можливо завдяки тому, що не відбувається постійної зміни кута атаки лопатей, здійснюваного за рахунок керування циклічним кроком гвинта, яке в даному винаході не передбачено. Згідно із даним винаходом, вузол, що керує системою гвинтів і схематично показаний на фіг. 3, по суті, містить дві пластини, що обертаються, але не коливаються, функція яких буде детально розкрита далі. Вказаний вузол починається від важеля керування 9 загальним кроком і доходить до втулки гвинта. На фіг. 3 також показаний кінематичний ланцюг основної ручки керувань 8, причому вказаний ланцюг починається від ручки керувань 8 і виконаний з можливістю синхронного керування нахилом двох задніх елеронів, правого елерона 2 і лівого елерона 3. Крім того, на фіг. 3 зображені педалі, розташовані перед пілотом, направленим до носової частини машини. Діючи на праву педаль 10 і ліву педаль 11, пілот міняє нахил переднього елерона 1. Фіг. 4 дозволяє детально вивчити кінематичний ланцюг важеля керування загальним кроком, який може бути прямим, як показано на кресленні, або з передбаченим сервоприводом відомого типу. Вказаний сервопривід використовують при необхідності зменшення зусиль прикладених пілотом. Вказаний кінематичний ланцюг починається від важеля керувань 9 загальним кроком, розташованого, як правило, зліва від пілота, який переміщає його вгору або вниз. На фіг. 4 важіль 9 зображений в нейтральному положенні, тобто в положенні, при якому усі лопаті гвинтів одночасно встановлені на геометрично нульовий кут атаки відносно площини обертання кожного гвинта так, щоб, коли машина знаходилася на землі, підтримувальна сила не виникала. Аналізуючи роботу кінематичного ланцюга важеля керування загальним кроком, можна помітити, що важіль 12, нерухомо закріплений відносно важеля 9, дозволяє переміщати рульову тягу 13. Вказана тяга 13 приводить в обертання прямокутний важіль трансмісії або L-подібний важіль 15, виконаний з можливістю обертання на осі 16 і керування шарнірною рульовою тягою 17. Рульова тяга 17 за рахунок осьового переміщення вгору або вниз, що викликається важелем керування 9 загальним кроком, керує переміщенням контрольної втулки 18 вгору або вниз. Контрольна втулка 18 обладнана двома підшипниками 19 і 20, що обертаються на нижньому фланці 21, нерухомо закріпленому відносно циліндричного тіла 22. Вказане циліндричне тіло або "рукав" 22 встановлений з можливістю осьового ковзання на зовнішньому співвісному валу 23, причому поворот рукава 22 відносно валу 23 фіксований, оскільки рукав 22 запускається в рух подовжньою тягою 24 і 25, нерухомо встановленими на самому ньому. Вказані повздовжні тяги 24-25 встановлені з можливістю проходження через втулку 26 нижнього гвинта, жорстко закріплену на вказаному валу 23, до того ж вони ковзають в осьовому напрямку усередині вказаної втулки 26 і запускаються в рух при її обертанні. 3 UA 100763 C2 5 10 15 20 25 30 35 40 45 50 55 60 Диск 27 також жорстко закріплений на рукаві 22 і, в результаті, повторює як обертальний рух, керований валом 23 за допомогою поздовжніх тяг 24 і 25 через втулку 26, так і його осьове переміщення, кероване контрольною втулкою 18 і також, яке передається на рукав 22. На диску 27 шарнірно закріплені керівні тяги 28 і 29, що переміщають задні кромки відповідних лопатей нижнього гвинта, сполучених з ними, і що обертаються синхронно з пластиною 27, оскільки їх обертає, хоча і не прямо, зовнішній вал 23. Відповідно до даного винаходу, лопаті нижнього гвинта встановлені на валах, що сполучають їх з втулкою 26, і при цьому мають тільки один ступінь свободи, а саме, ступінь свободи, що забезпечує можливість зміни їх загального кроку. По суті, функція рульових тяг 28 і 29 полягає в повідомленні поступального руху задній кромці відповідної лопаті від диска 27 і, таким чином, в зміні кута атаки кожної з лопатей гвинта. Відповідно до однієї з вирізняючих ознак даного винаходу, вказані подовжні тяги 24 і 25 повідомляють той самий поступальний рух зміни кроку і на верхній гвинт, встановлений співвісного відносно нижнього гвинта і що обертається в протилежному до нього напрямку. Зокрема, в переважному варіанті здійснення винаходу вказані поздовжні тяги 24-25 сполучають власний осьовий рух на внутрішній диск 30 зовнішнього кільця 31, що обертається в напрямку, протилежному до напрямку обертання диску 30 за рахунок розчеплення, що здійснюється упорним підшипником 33. Внутрішній вал 32 встановлений з можливістю обертання усередині вказаного диска 30 в напрямку, протилежному до напрямку обертання цього диска, причому без якої-небудь взаємної механічної дії. Таким чином, пластина 31 завжди здійснює той самий поступальний рух, що і нижній фланець 21 і усі описані елементи, нерухомо закріплені на ньому, а також один відносно одного. На пластині, що обертається, 31 шарнірно закріплені рульові тяги 34 і 35 для верхнього гвинта, що переміщаються синхронно з рульовими тягами 28 і 29, приведеними в рух диском 27, що призводить до аналогічного зміщення задньої кромки лопатей верхнього гвинта, встановленого співвісно відносно нижнього гвинта і що обертається в протилежному до нього напрямку. Таким чином, забезпечена синхронна зміна кроку усіх лопатей, тобто загального кроку обох гвинтів. Слід зазначити, що відповідно до ще однієї відмітної ознаки даного винаходу ні диск 27, ні пластина, що обертається, 31 не коливаються, в результаті, не відбувається циклічної зміни кута атаки жодної з лопатей гвинтів. З приведеного вище опису кінематичного ланцюга важеля 9 керування загальним кроком витікає, що при переміщенні вказаного важеля 9 вгору одночасно станеться зміщення вниз задньої кромки усіх лопатей, що приведе до збільшення кута їх атаки, як геометрично в абсолютному напрямку, так і аеродинамічно відповідно до поточних умов польоту. При переміщенні важеля 9 вниз, отримаємо зворотний ефект, із загальним зменшенням кута атаки усіх лопатей. Таким чином, вказані дії дозволяють керувати набором висоти і зниженням вертольоту. На відміну від сучасних літальних апаратів, в яких кут крену у будь-якому напрямку регулюють шляхом керування циклічним кроком гвинта, в даному винаході кут крену регулюють, використовуючи задні елерони 2-3. Поточне положення задніх елеронів визначає пілот, переміщаючи ручку 8 керування, через спеціальний кінематичний ланцюг керування або безпосередньо (фіг. 5), або з використанням сервоприводів відомого типу, причому їх використовують при необхідності для зменшення зусилля, що докладається пілотом. Керований рух, прикладений до ручки 8, доходить до елеронів 2 і 3 через дзеркальну послідовність кінематичних з'єднань, що відходять від блоку керування, сформованого, по суті, між трьома конічними зубчастими колесами, що знаходяться у безперервному зачепленні, причому далі вказаний блок іменують "диференціальний блок або конструкція". Вказаний кінематичний ланцюг запускається в рух за допомогою ручки 8 керування і цілком представлений на фіг. 5. Вказаний диференціальний блок показаний на фіг. 6. У описі принципу роботи вказаного блоку, приведеному далі, посилаються на фіг. 6. Диференціальний блок утворений ручкою 8 керування, відносно якої нерухомо закріплені вертикальний L-подібний кронштейн 36 і центральне конічне зубчасте колесо 38. Вказане зубчасте колесо 38 закріплено на ручці 8 за допомогою короткого валу, що проходить через горизонтальний С-подібний кронштейн 37, в результаті, воно здатне повторювати будь-який рух, що прикладається до ручки 8. Центральне конічне зубчасте колесо 38 знаходиться у безперервному зачепленні з двома бічними конічними зубчастими колесами: правим колесом 39 і лівим колесом 40, утворюючи, тим самим традиційну диференціальну конструкцію. Вказані бічні конічні зубчасті колеса 39 і 40 закріплені на одному кінці правої півосі 41 і лівій півосі 42 відповідно, причому їх зчеплення з центральним конічним зубчастим колесом 38 забезпечено спеціальною опорою або С-подібним кронштейном 37. Дві півосі 41 і 42 виконані з можливістю обертання у відповідних отворах, виконаних в опорі 37, при 4 UA 100763 C2 5 10 15 20 25 30 35 40 45 50 55 60 цьому вони жорстко сполучені із зовнішніми конічними зубчастими колесами 43 і 44. Конічні зубчасті колеса 43 і 44, у свою чергу, приводять в рух трансмісійні конічні зубчасті колеса 45 і 46, які керують повздовжніми тягами 47 і 48 відповідно. Як показано на фіг. 5, повздовжні тяги 47 і 48 через синхронні кардани 49 і 50 і додаткові трансмісійні тяги 51 і 52 передають рухи, здійснювані головною ручкою 8, від диференціального блоку до правого елерону 2 лівому елерону 3, відповідно. Детально вивчивши фіг. 6, можна помітити, що положення основної ручки 8 керування визначає положення задніх елеронів 2 і 3. Для простоти розуміння розглянемо в першу чергу два основні рухи, здійснюваних ручкою 8 при дії на неї пілота, і приймемо їх як еталонні рухи. До основних рухів відносяться відхилення вперед-назад (повздовжнє відхилення) і вправо-вліво (поперечне відхилення), яким відповідають аналогічні відхилення усього вертольота. Будь-які інші можливі рухи ручки 8 є не що інше, як сума векторів компонентів відхилення уздовж цих двох основних осей координат. Розглянемо випадок відхилення ручки вперед або назад. Можна помітити (фіг. 6), що через фіксований вузол, сформований основною ручкою керування 8, L-подібним кронштейном 36 і центральним конічним зубчастим колесом 38, обертання вперед або назад передається на Сподібний кронштейн 37, причому колесо 38 не здійснює обертальний рух відносно С-подібного кронштейна 37. В даному випадку, бічні конічні зубчасті колеса 39 і 40, що знаходяться в зачепленні з центральним конічним зубчастим колесом 38, також обертаються разом з кронштейном 37, який переміщає їх в тому ж самому напрямку і на той же самий кут, причому один відносно одного вказані колеса не рухаються. Це відбувається завдяки тому, що зубчасте колесо 38 не рухається відносно кронштейна 37. Внаслідок чого, дві півосі 41 і 42, нерухомо закріплені відносно бічних конічних зубчастих коліс 39-40, перемістяться вперед або назад на той же самий кут, на який пілот змістив основну ручку 8, начебто вони були одним нерухомим валом. Враховуючи цей факт, слід зазначити, що конічні зубчасті колеса 45 і 46, що знаходяться в зачепленні із зубчастими колесами 43 і 44 відповідно, встановленими на протилежних кінцях відповідних півосей, почнуть обертатися в протилежних напрямах один відносно одного. Кінцевий результат вказаного обертання в протилежному напрямку, що називається також "сполученням", яке передається без змін на два задні елерони 2-3, проілюстрований на фіг. 7 і 8. На фіг. 7 показані положення, які приймають задні керуючі елерони, коли пілот повністю відхиляє ручку 8 керування вперед. У цьому контрольному положенні зубчасте колесо 45, показане з позиції пілота, обертається проти годинникової стрілки на той же кут, на який обертається ручка, тоді як зубчасте колесо 46 обертається на той же кут, але за годинниковою стрілкою. Ці обертання передаються без змін, через трансмісійні тяги 47, 51 і 48, 52 і синхронні кардани 49 і 50, безпосередньо на задні елерони 2-3, в результаті, відповідні верхні передні кромки наближаються один до одного, нижні передні кромки віддаляються один від одного, тобто два елерони розходяться відносно сторони фюзеляжу. Враховуючи те, що на елерони діє низхідний вертикальний потік повітря від гвинтів, кожен елерон створює відхилення вказаного потоку, дзеркально симетричне відхиленню, що створюється іншим елероном. При похилому положенні осей обертання елеронів відносно подовжньої осі машини, елерон 2 відхиляє потік повітря від гвинтів вперед і управо, тоді як лівий елерон відхиляє його вперед і вліво, дзеркально відносно подовжній осі фюзеляжу. Таким чином, праві і ліві елементи компенсують один одного, а передні елементи підсумовуються. У даному винаході згідно з третім законом Ньютона, їх сумарний результат впливатиме на центр тяжіння вертольоту з силою, прагнучою змістити його назад, при цьому увесь вертоліт, що утримується силою двох гвинтів, розташованих над його центром тяжіння, прагнутиме у зворотному напрямку, тобто вперед. У цьому новому положенні станеться відповідний нахил осі обертання гвинтів і, відповідно, їх (взаємно паралельних) площин обертання, які завдяки описаному способу конструювання і зборки машини завжди перпендикулярні осі обертання гвинтів. Таким чином, створена частина тяги повітряного потоку від гвинтів, спрямована до носу вертольоту і така, що викликає переміщення машини вперед, зокрема, у напрямку зміщення головної ручки 8 вперед, виконуваного пілотом і розглянутого на початку цього аналізу. Відхилення ручки 8 назад до упору згідно з принципом дії, протилежним до того, що був описаний вище, симетрично забезпечує еквівалентне обертання задніх елеронів 2 і 3 в протилежному напрямку, як проілюстровано на фіг. 8. При цьому, слід зазначити, що елерони обертаються таким чином, що верхні передні кромки віддаляються один від одного, а відповідні нижні передні кромки зближуються. В результаті, низхідний потік повітря від гвинтів відхиляється всередину і назад відносно центру тяжіння машини. Таким чином, центр тяжіння машини прагнутиме вперед до носової частини машини, що викличе переміщення самого 5 UA 100763 C2 5 10 15 20 25 30 35 40 45 50 55 60 вертольоту і площини обертання лопатей назад, тобто в напрямку, вибраному пілотом за допомогою головної ручки 8. Для того, щоб зрозуміти, що відбувається при зміщенні головної ручки 8 управо або вліво, необхідно знову звернутися до фіг. 6. Коли ручку 8 відхиляють управо або вліво, горизонтальний С-подібний кронштейн 37 залишається нерухомим, тоді як L-подібний кронштейн 36 обертається разом з ручкою. Таким чином, конічне зубчасте колесо 38, жорстко сполучене з кронштейном 36, також переміщається на той же кут. Вказане колесо 38 передає обертальний рух на кожне бічне зубчасте колесо 39 і 40, які, очевидно, обертатимуться в протилежних один до одного напрямах, приводячи в рух відповідні півосі 41 і 42 і, відповідно, зовнішні зубчасті колеса 43 і 44. При цьому зубчасті колеса 43 і 44 передають обертальний рух на зубчасті колеса 45 і 46, з якими вони зачеплені, в тому ж самому напрямку. У даному випадку обидва зубчасті колеса 45 і 46 обертаються проти годинникової стрілки, коли ручку 8 відхиляють управо, і за годинниковою стрілкою, коли ручку 8 відхиляють вліво. Очевидно, що такий же обертальний рух здійснюють вали 47 і 48, нерухомо закріплені відносно зубчастих коліс 45 і 46, а також два задні елерони 2 і 3 через частину трансмісійного ланцюга, що залишився. Відповідно до даного винаходу задні елерони 2 і 3, які при відхиленні ручки керування 8 вперед/назад переміщаються за рахунок зв'язаного руху, у разі відхилення головної ручки 8 вправо/вліво, переміщатимуться за рахунок погодженого руху, але в напрямку, протилежному до напрямку відхилення ручки. Результат, що отримується при відхиленні головної ручки 8 керування в крайнє праве і крайнє ліве положення, проілюстрований на фіг. 9 і 10. У цих двох випадках, при відхиленні ручки 8 управо і вліво відповідно, С-подібний кронштейн 37 залишається нерухомим. Як показано на фіг. 9, при відхиленні ручки до упору управо, показаному з позиції пілота, верхні передні кромки обох елеронів обертаються до лівої сторони машини. При цьому, основна частина повітряного потоку, що відхилюється від гвинтів спрямовується до правої сторони вертольоту, зміщуючи центр тяжіння апарату і повертаючи його вліво, що призводить до відхилення вертольоту управо, тобто в потрібну сторону. Якщо розглядати фіг. 9, можна помітити, що правий елерон 2 відхиляє повітряний потік від гвинтів вправо і вперед, тоді як лівий елерон 3 відхиляє повітряний потік від гвинтів вправо і назад. Таким чином, на додаток до сили, що дає результат, діючої вправо і що створює тягу вертольота і обертання за рахунок відстані від вказаної тяги до центру тяжіння, існує також пара сил, що створює крутний момент в центрі тяжіння, який прагне розгорнути вертоліт управо. На фіг. 10 представлена зворотна дія, суть якої тепер очевидна. В даному випадку ручка керування відхилена до упору вліво, обидва елерони нахиляються до правої сторони машини, зміщуючи центр тяжіння і повертаючи його управо, тим самим, нахиляючи усю машину вліво, тобто убік, заданий пілотом. Слід зазначити, що оскільки задні елерони відведені назад відносно центру тяжіння машини, як видно на фіг. 1, у момент повідомлення бічної команди або введення бічного елементу з урахуванням положення ребер, на машину діє елемент обертального руху навколо вертикальної осі, що саме по собі сприяє обертанню вертольоту, причому у відповідь на команди вперед-назад машина ефективно переміщається або вперед, або назад. Вказане обертання тим сильніше, чим більше нахил ручки керування убік, виконуваний пілотом для збільшення швидкості розвороту. У разі коли, незважаючи на необхідність швидкого розвороту машини в одну з двох сторін, пілот хоче запобігти одночасному надмірному обертанню навколо вертикальної осі, він може компенсувати вказане спонтанне положення, зменшивши за бажанням кутову швидкість розвороту за рахунок дії на педалі і відповідного повороту переднього елерона. Тим самим, він може добитися точної заданої траєкторії. Якщо ж пілот керує тільки педалями, утримуючи ручку в нейтральному центральному положенні, він отримує просте обертання машини навколо вертикальної осі точно так, як це відбувається на сучасних вертольотах, обладнаних системою керування положенням відносно вертикальної осі (з вертикально встановленим кермівним гвинтом), тобто способом, відмінним від розкритого вище. Механізм керування педалями, контролюючий положення (обертання) тільки переднього елерона, показаний на фіг. 11. Як видно з фіг. 11, комплект педалей складається з двох педалей: правій педалі 10 і лівій педалі 11, доступних пілотові, який може переміщати їх ногами. Вказані педалі з відповідними L-подібними кронштейнами 49 і 50 і поперечними важелями 51 і 52 утворюють частину паралелепіпеда пантографа. Конічне зубчасте колесо 53, закріплене на важелі 52, повідомляє рух на конічне зубчасте колесо 54 і, тим самим, на вал 55 і передній елерон 1, жорстко сполучений з вказаним валом. Вказаний керуючий ланцюг, може бути прямим, як показано на кресленні, або з передбаченим сервоприводом відомого типу, що 6 UA 100763 C2 5 10 15 20 25 30 35 40 45 50 55 60 забезпечує зменшення зусиль, що докладаються пілотом. Розташування рухливої тяги у вигляді пантографа дозволяє педалям здійснювати паралельний рух вперед і назад, викликаючи, тим самим, обертання зубчастого колеса 53 і інших елементів вказаного керуючого ланцюга. При розгляді кінематики пристрою можна помітити, що, коли пілот штовхає праву педаль 10 вперед, зубчасте колесо 53, показане згори, обертається проти годинникової стрілки і приводить в рух зубчасте колесо 54. Зубчасте колесо 54, показане спереду, обертається за годинниковою стрілкою, викликаючи через вал 55 нахил верхньої передньої кромки переднього елерона 1 управо, або, якщо дивитися з позиції пілота, його обертання за годинниковою стрілкою. Очевидно, що, знаходячись у вказаному положенні нахилу відносно конструкції вертольоту, елерон 1 відхиляє повітряний потік від гвинтів до лівої сторони вертольота. При цьому, якщо ручка керування залишається в центрі, машина обернеться навколо вертикальної осі управо, тобто убік, з якої знаходиться педаль, на яку впливає пілот. Коли пілот натискає на ліву педаль, відбувається аналогічна, але протилежна дія. Приведений вище аналіз виконаний на основі припущення, що пілот впливає тільки на педалі. У зворотному випадку, якщо робота педалей 10-11 відбувається одночасно з головною ручкою 8, модифікація забезпечена ефективністю керування відповідно до вибору пілота при здійсненні маневру будь-якого можливого типу довільно і заданий, особливо при здійсненні повороту. У завершенні опису конструкції елементів керування положенням вертольоту, передбачених в даному винаході, при нормальному режимі, а також описи ефекту від дій, що виконуються відносно керуючих елементів, слід також описати поведінку вертольоту при певному режимі польоту, відомому як режим авторотації. Цей режим польоту неминучий у разі часткової або повної відсутності підйомної сили, що створюється двигуном. В даному випадку, характеристики роботи пропонованої машини перевищують і, по суті, покращують можливості сучасних машин аналогічного класу. Цього вдається добитися завдяки двом основним особливостям: по-перше, завдяки можливості одночасної установки усіх лопатей в значний негативний кут атаки, і, подруге, завдяки наявності вказаних мас 6, призначених для локалізованого збільшення ваги на кінці кожної лопаті. Необхідно відмітити, що в сучасних вертольотах і відомих на сьогодні літальних апаратах подібного типу неможливо встановити лопаті, утримуючі гвинти вертольоту, в значний негативний кут атаки. Це неможливо через перешкоди, що виникають при керуванні циклічним кроком. Звалювання сучасного вертольота в режимі авторотації, як правило, є негативним і безповоротним станом, незалежно від висоти і положення польоту, що, в результаті, призводить до падіння вертольоту. Для будь-якого використовуваного вертольоту існує певна діаграма, згідно якої пілот зобов'язаний запобігати або зводити до мінімуму вірогідність виникнення вказаних ситуацій, при польоті зокрема, запобігати виникненню таких небезпечних, часто фатальних положень звалювання. Вказана діаграма сумнозвісна для будь-якого пілота вертольоту, і на авіаційній професійній мові називається "діаграма мертвої зони". Згідно із даним винаходом, за умови мінімальної необхідної уважності з боку пілота, вірогідність виникнення подібних ситуацій зведена практично до нуля, незалежно від висоти і положення вертольоту. По суті, значна кінетична енергія, що накопичується гвинтами завдяки передбаченим кінцевим масам 6 на лопатях гвинтів, навіть при відмові двигуна, дозволяє запобігти можливому зниженню швидкості обертання лопатей за дуже короткий час і уникнути ефективних і корекційних своєчасних втручань пілота. В результаті, у пілота залишається час і можливість для безпечного керування зниженням вертольота навіть на дуже невеликих висотах. Аналогічно, на великих висотах, забезпечена можливість запобігання втраті двигуном швидкості обертання, при цьому пілоти отримують можливість швидкої установки лопатей на значний негативний кут атаки навіть більше - 45°. Таким чином, навіть якщо машина втрачає висоту і лопаті знаходяться в умовах небезпечного аеродинамічного звалювання, їх можна повернути назад в умови ламінарного потоку, при цьому відновити аеродинамічний підйом відносно низхідного повітряного потоку і далі відновити швидкість обертання, що дозволить пілотові поступово знову досягти задану швидкість обертання і встановити кут атаки, при якій можливе зниження вертольоту в режимі авторотації. Виконати описані в даному винаході дії в аварійній ситуації можна тільки на пропонованому вертольоті, зокрема, завдяки тому, що в ньому не передбачено керування циклічним кроком, при якому виконання даних дії стало б неможливим. Проте існує ще один режим польоту, при якому пропонований в даному винаході вертоліт не має недоліків машин, відомих на сьогодні. Це режим, при якому пропонований вертоліт 7 UA 100763 C2 5 10 15 20 25 30 35 функціонує подібно до конвертиплану, при цьому він не має складної конструкції конвертиплану і навіть при мінімальних пошкодженнях не схильний до серйозних ризиків. У разі коли пропонований в даному винаході вертоліт обладнаний двигуном або двигунами достатньої потужності, його можна привести в майже горизонтальне положення на швидкості, що перевищує швидкість, яку розвиває будь-який сучасний вертоліт, просто за рахунок керування кутом атаки задніх елеронів 2 і 3. У цьому конкретному положенні вертольоту гвинти, площина обертання яких практично вертикальна, виконують функцію традиційних співвісних гвинтів протилежного обертання зі змінюваним кроком, а задні елерони, окрім їх основної функції керування положенням, розвивають також аеродинамічну підйомну силу, подібно до крил літака. Після чого вертоліт можна у будь-який момент знову привести в традиційне положення вертольота просто шляхом зменшення потужності, що подається до гвинтів, що несуть, і шляхом керування кутом атаки задніх елеронів 2 і 3. Вертоліт, сконструйований з цією додатковою можливістю, доцільно обладнати простими пристроями, призначеними для керування положенням сидінь пілота і можливих пасажирів, для компенсації значного обертання фюзеляжу і утримання екіпажу і пасажирів вертольоту в положенні близькому до вертикального. Вказані пристрої переважно не потрібні в машинах описаного типу без пілота і/або екіпажу на борту. На завершення, слід згадати, що в даному винаході, з точки зору навантажень, діючих на конструкції і на аеродинамічні органи керування навіть в умовах нормального польоту, поведінка вертольоту, як правило, критичніша і не стабільніша, в порівнянні з поведінкою літака, наближено до поведінки останнього, навіть попри те, що вертоліт зберігає свою характерну особливість польоту і керування на дуже низьких швидкостях або навіть у фіксованій точці, що повністю виключено для літака. Більше того, при оснащенні вертольота достатньою тяговою потужністю він може мати характеристики, властиві для літака. Відповідно до переважного варіанту здійснення даного винаходу передбачений важіль 9 керування загальним кроком виконаний з можливістю одночасної і загальної зміни кута атаки усіх лопатей, яке для позитивного кута атаки передніх кромок досягає значень, що перевищують або рівні 12°, а для негативного кута атаки передніх кромок складає більше 45°. У даному винаході цього досягають просто за рахунок керування переміщенням тільки двох співвісних пластин протилежного обертання, що не коливаються і утворюють частину елементу, що обертається, розташованого поблизу гвинтів і виконаного з можливістю ковзання на відповідних валах за допомогою передач, що відходять безпосередньо або за допомогою сервоприводів від описаного вище важеля 9 керування загальним кроком і діючих синхронно на кожну лопать гвинта для зміни кута атаки його лопатей. ФОРМУЛА ВИНАХОДУ 40 45 50 55 60 1. Вертоліт з несучими гвинтами (4, 5) протилежного обертання, який відрізняється тим, що в сукупності складає: засоби для зміни загального кроку, тобто для одночасної і рівної зміни кута атаки усіх лопатей гвинтів (4, 5); і засоби керування положенням і напрямом польоту, що створюють відповідні аеродинамічні сили за допомогою повітряного потоку від несучих гвинтів; причому вказані засоби керування положенням і напрямком польоту містять керуючі поверхні, дві з яких розташовані в задній частині вертольота, причому передбачені рухомі засоби, що призначені для переміщення вказаних керуючих поверхонь симетрично або асиметрично відносно одна до одної для забезпечення нахилу або руху по тангажу всього вертольота. 2. Вертоліт за п. 1, який відрізняється тим, що вказані гвинти протилежного обертання містять верхній гвинт (4) і нижній гвинт (5), розташовані на одній осі. 3. Вертоліт за будь-яким з пп. 1 або 2, який відрізняється тим, що лопаті гвинтів (4, 5) містять додаткові кінцеві маси обтічної форми, що забезпечують лопатям гвинтів додаткову жорсткість за рахунок відцентрової сили, що розвивається при обертанні, а також що дозволяють гвинтам накопичувати більшу кількість кінетичної енергії, використовуваної в можливих критичних умовах польоту і, зокрема, при маневруванні в режимі авторотації. 4. Вертоліт за п. 1, який відрізняється тим, що вказаних керуючих поверхонь або елеронів (1, 2, 3) переважно щонайменше три. 5. Вертоліт за п. 4, який відрізняється тим, що два елерони (2, 3) розташовані в задній частині фюзеляжу, симетрично відносно подовжній осі машини, причому їх відповідні осі обертання лежать в горизонтальній площині, що проходить через центр тяжіння вертольота, а третій 8 UA 100763 C2 5 10 15 20 25 30 35 40 45 50 55 60 елерон (1) розташований в носовій частині, зокрема, на подовжній осі вертольота, при цьому він має власну вісь обертання, що лежить в горизонтальній площині, що проходить через центр тяжіння машини; причому два бічні задні елерони (2, 3) виконано з можливістю керованого зміщення пілотом з використанням відомої основної ручки (8) управління, що виконує виключно вказану функцію, а перший елерон (1) виконаний з можливістю управління пілотом з використанням педалей (10, 11), що виконують тільки цю конкретну функцію. 6. Вертоліт за п. 1, який відрізняється тим, що вказані засоби зміни загального кроку містять важіль (9) керування загальним кроком, який виконує виключно функцію одночасної і рівної зміни кута атаки лопатей обох несучих гвинтів. 7. Вертоліт за п. 1, який відрізняється тим, що містить щонайменше: один двигун, одну трансмісію і роз'єднувальний ланцюг, передбачений між двигуном і валами для керування гвинтами, а також один ланцюг шестерень редуктора, що міняє напрям обертання співвісних валів, по суті відомих і таких, що мають характеристики, властиві відомим вертольотам з двома співвісними гвинтами протилежного обертання. 8. Вертоліт за п. 1, який відрізняється тим, що передбачено три елерони (1, 2, 3), розташованих під гвинтами (4, 5), в горизонтальній площині, паралельній фіксованій площині обертання гвинтів і такій, що проходить через центр тяжіння вертольота; причому в умовах стабільного польоту, у фіксованій точці хорда крила вказаних елеронів паралельна осі обертання гвинтів (4, 5) або, іншими словами, перпендикулярна площині їх обертання. 9. Вертоліт за п. 2, який відрізняється тим, що вказані засоби зміни загального кроку містять вузол для керування системою гвинтів, містить дві пластини (27, 31), що обертаються, але не коливаються, призначені для зміни нахилу лопатей гвинтів (4, 5), відповідним чином встановлених на втулці гвинта. 10. Вертоліт за п. 9, який відрізняється тим, що кінематичний ланцюг керування загальним кроком є прямим або з передбаченим сервоприводом відомого типу, причому він починається від важеля (9) керування загальним кроком, встановленого з можливістю руху вгору або вниз, причому вказаний важіль (9) нерухомо закріплений відносно важеля (12), призначеного для переміщення рульової тяги (13), що приводить в обертальний рух прямокутний важіль трансмісії або L-подібний важіль (15), встановлений з можливістю обертання на вісь (16) і керуючий шарнірною рульовою тягою (17), встановлений з можливістю осьового руху вгору або вниз для керування переміщення вгору або вниз контрольної втулки (18), обладнаний двома підшипниками (19, 20), що обертаються на нижньому фланці (21), нерухомо закріплений відносно циліндричного тіла (22); причому циліндричне тіло або рукав (22) виконано з можливістю осьового ковзання на зовнішньому співвісному валу (23) і фіксованого обертання відносно указаного вала, оскільки його приводить в рух спеціальна поздовжня тяга (24, 25), нерухомо закріплена відносно рукава (22). 11. Вертоліт за п. 10, який відрізняється тим, що вказані поздовжні тяги (24, 25) встановлені з можливістю проходження через втулку (26) нижнього гвинта (5), жорстко закріпленого на зовнішньому валу (23), причому вони ковзають усередині вказаної втулки (26) в осьовому напрямку і приводяться в рух при її обертанні. 12. Вертоліт за п. 11, який відрізняється тим, що містить диск (27), що не коливається, жорстко закріплений на рукаві (22) з можливістю повторення як його обертального руху, що керується валом (23) за допомогою тяг (24, 25) через втулку (26), так і його осьового руху, що керується контрольною втулкою (18), і також того, що передається на рукав (22). 13. Вертоліт за п. 12, який відрізняється тим, що на диску або пластині (27) шарнірно закріплені рульові тяги (28, 29), що переміщають задні кромки відповідних лопатей нижнього гвинта (5), сполучених з ними, і що обертаються синхронно з пластиною (27), оскільки їх обертає, хоча і побічно, вказаний зовнішній вал (23). 14. Вертоліт за п. 13, який відрізняється тим, що лопаті нижнього гвинта (5) встановлені на валах, що сполучають їх з втулкою (26), і при цьому мають тільки один ступінь свободи, а саме ступінь свободи, що забезпечує можливість зміни їх загального кроку; причому функції рульових тяг (28, 29) полягатимуть тільки в передачі задній кромці відповідної лопаті поступального ходу від диска (27) і, таким чином, у відповідній зміні кута атаки кожній з лопатей гвинта (5). 15. Вертоліт за п. 10, який відрізняється тим, що вказані поздовжні тяги (24, 25) передають власний поступальний рух зміни кроку також і на верхній гвинт (4), встановлений співвісно відносно нижнього гвинта (5), і що обертається в протилежному від нього напрямку. 16. Вертоліт за п. 15, який відрізняється тим, що вказані тяги (24, 25) передають власні осьові рухи на внутрішній диск (30) зовнішнього кільця (31), що обертається в напрямку, протилежному до напрямку обертання диска (30) за рахунок розчеплення, що здійснюється спеціальним упорним підшипником (33), причому внутрішній диск (30) і зовнішнє кільце (31) не коливаються. 9 UA 100763 C2 5 10 15 20 25 30 35 40 45 50 55 17. Вертоліт за п. 16, який відрізняється тим, що внутрішній вал (32) встановлений з можливістю обертання усередині вказаного диска (30) в протилежному до нього напрямку без якої-небудь взаємної механічної дії; в результаті, зовнішнє кільце або пластина (31) завжди здійснює той же самий поступальний рух, що нижній фланець (21). 18. Вертоліт за п. 17, який відрізняється тим, що на пластині (31), що обертається, шарнірно закріплені рульові тяги (34, 35) для верхнього гвинта (4), приведені в рух диском (27), що не коливається, жорстко закріпленим на рукаві (22) з можливістю повторення його обертального і осьового руху, що призводить до аналогічного зміщення задньої кромки лопатей верхнього гвинта (4), встановленого співвісно відносно нижнього гвинта (5), і що обертається в протилежному йому напрямку. 19. Вертоліт за п. 5, який відрізняється тим, що керування кутом крену здійснюють два задні елерони (2, 3), поточне положення яких визначає пілот, переміщаючи ручку (8) керування, через спеціальний кінематичний ланцюг керування безпосередньо і з використанням сервоприводів відомого типу. 20. Вертоліт за п. 19, який відрізняється тим, що рух, переданий пілотом на ручку (8) керування, доходить до елеронів (2, 3) через два дзеркальні кінематичні ланцюги керування, приведені в рух ручкою (8), нерухомо закріпленою відносно вертикального L-подібного кронштейна (36), на якому за допомогою короткого вала, що проходить через горизонтальний С-подібний кронштейн (37), встановлено центральне конічне зубчасте колесо (38), що знаходиться у безперервному зачепленні з двома іншими бічними конічними зубчастими колесами, співвісними і протиставленими одне одному: правим колесом (39) і лівим колесом (40); що дозволяє повертати ручку (8) вперед/назад навколо осі обертання двох бічних конічних зубчастих коліс (39, 40), правого і лівого, навколо осі центрального конічного зубчастого колеса (38). 21. Вертоліт за п. 20, який відрізняється тим, що бічні конічні зубчасті колеса (39, 40) закріплені на одному кінці правої півосі (41) і лівої півосі (42) відповідно, причому їх зчеплення з центральним конічним зубчастим колесом (38) забезпечене вказаним С-подібним кронштейном (37); при цьому дві півосі (41, 42) встановлені з можливістю обертання відносно опори (37) і, у свою чергу, жорстко сполучені із зовнішніми конічними зубчастими колесами (43, 44). 22. Вертоліт за п. 21, який відрізняється тим, що вказані зовнішні зубчасті колеса (43, 44), у свою чергу, приводять в рух трансмісійні конічні зубчасті колеса (45, 46), з якими вони зчеплені і які керують подовжньою тягою (47, 48) відповідно, які через синхронні кардани (49, 50) і додаткові трансмісійні тяги (51, 52) передають рухи, що здійснюються головною ручкою (8), до правого елерона (2) і лівого елерона (3), відповідно. 23. Вертоліт за п. 5, який відрізняється тим, що керування положенням обертання тільки переднього елерона (1) здійснює механізм керування комплектом педалей, що містить дві педалі, права педаль (10) і ліва педаль (11), на які пілот натискає ногами; причому педалі з відповідними L-подібними кронштейнами (49, 50) разом з поперечними важелями (51, 52) утворюють частину паралелепіпеда пантографа. 24. Вертоліт за п. 23, який відрізняється тим, що передбачене центральне конічне зубчасте колесо (53), закріплене на важелі (52), і конічне зубчасте колесо (54), що приводить в рух, і вал (55) для обертання переднього елерона (1), жорстко сполученого з ним; вказаний ланцюг керування є простим і/або з передбаченим сервоприводом відомого типу. 25. Вертоліт за п. 24, який відрізняється тим, що, коли праву педаль (10) штовхають вперед, верхня передня кромка переднього елерона (1) нахиляється управо, а коли ліву педаль (11) штовхають вперед, верхня передня кромка переднього елерона (1) нахиляється вліво; причому, якщо ручку (8) утримують в центрі, машина обертається навколо своєї вертикальної осі убік, в якому знаходиться педаль, що натискається. 26. Вертоліт за будь-яким з пп. 1 або 2, який відрізняється тим, що вказані засоби зміни загального кроку призначені для виконання одночасної і загальної зміни кута атаки усіх лопатей гвинтів (4, 5), який для позитивного кута атаки передніх кромок досягає значень, що перевищують або рівні 12°, а для негативного кута атаки передніх кромок складає більше 45°; що забезпечене просто за рахунок керування переміщенням тільки двох співвісних пластин (27, 30) протилежного обертання, що не коливаються і утворюють частину елемента, що обертається, розташованого поблизу гвинтів і виконаного з можливістю ковзання на відповідних валах за допомогою передач, що відходять безпосередньо або за допомогою сервоприводів відомого типу, від важеля керування (9) загальним кроком і діючих синхронно на кожну лопать гвинта для зміни кута атаки лопатей гвинтів. 10 UA 100763 C2 11 UA 100763 C2 12 UA 100763 C2 13 UA 100763 C2 14 UA 100763 C2 15 UA 100763 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 16
ДивитисяДодаткова інформація
Назва патенту англійськоюAircraft with coaxial counter-rotating sustaining rotors without cyclic change of pitch equipped with means of aerodynamic control of position and trajectory of flight
Автори англійськоюCilli, Gianni
Назва патенту російськоюВертолет с соосными винтами противоположного вращения без циклического изменения шага, оснащенный средствами аэродинамического контроля положения и траектории полета
Автори російськоюСилли Гиани
МПК / Мітки
МПК: B64C 27/10
Мітки: положення, співвісними, зміни, обертання, оснащений, засобами, гвинтами, траєкторії, кроку, польоту, циклічної, контролю, протилежного, аеродинамічного, вертоліт
Код посилання
<a href="https://ua.patents.su/18-100763-vertolit-iz-spivvisnimi-gvintami-protilezhnogo-obertannya-bez-ciklichno-zmini-kroku-osnashhenijj-zasobami-aerodinamichnogo-kontrolyu-polozhennya-i-traehktori-polotu.html" target="_blank" rel="follow" title="База патентів України">Вертоліт із співвісними гвинтами протилежного обертання без циклічної зміни кроку, оснащений засобами аеродинамічного контролю положення і траєкторії польоту</a>
Дводизельна пропульсивна установка із співвісними гвинтами протилежного обертання

Номер патенту: 32277
Опубліковано: 12.05.2008
Автори: Тарабрін Олександр Іванович, Щербак Юрій Георгійович
МПК: B63H 5/00, B63H 21/00, B63H 23/00
Мітки: дводизельна, співвісними, протилежного, установка, обертання, гвинтами, пропульсивна
Формула / Реферат:
Дводизельна пропульсивна установка із співвісними гвинтами протилежного обертання, що містить у своєму складі два головних реверсивних дизельних двигуни, два гребних гвинти, послідовно розташованих на співвісних валах таким чином, що задньому гвинту обертання надається внутрішнім валом, а передньому - за допомогою зовнішнього вала, підшипникові вузли, а також зубчасте зачеплення, виконане у вигляді двопотокової схеми, яка відрізняється тим,...
Однодизельна пропульсивна установка із співвісними гвинтами протилежного обертання
Номер патенту: 21976
Опубліковано: 10.04.2007
Автори: Щербак Юрій Георгійович, Тарабрін Олександр Іванович
МПК: B63H 5/00, B63H 21/00, B63H 23/00
Мітки: установка, гвинтами, однодизельна, співвісними, пропульсивна, обертання, протилежного
Формула / Реферат:
Однодизельна пропульсивна установка із співвісними гвинтами протилежного обертання, що містить у своєму складі головний малооборотний реверсивний дизельний двигун, два гребних гвинти, послідовно розташованих на співвісних валах таким чином, що задньому гвинту обертання надається внутрішнім валом, з'єднаним із вихідним фланцем двигуна, а передньому гвинту - за допомогою зовнішнього вала, обертання на який передається через зубчасте зачеплення,...
Однодизельна пропульсивна установка із співвісними гвинтами протилежного обертання
Номер патенту: 11396
Опубліковано: 15.12.2005
Автори: Щербак Юрій Георгійович, Тарабрін Олександр Іванович, Чередніченко Олександр Костянтинович
МПК: B63H 5/00, B63H 21/00, B63H 23/00
Мітки: гвинтами, установка, пропульсивна, обертання, співвісними, однодизельна, протилежного
Формула / Реферат:
Однодизельна пропульсивна установка із співвісними гвинтами протилежного обертання, що містить головний малооборотний реверсивний дизельний двигун, який передає потужність на два гребні гвинти, послідовно розташовані на співвісних валах таким чином, що задньому гвинту обертання надається внутрішнім валом, з΄єднаним із вихідним фланцем двигуна, а передньому гвинту - за допомогою зовнішнього вала, обертання на який передається через...
Пристрій для контролю спрацьовування блока реле тиску приймача статичного тиску літального апарата на спадній гілці траєкторії польоту при наземних випробуваннях
Номер патенту: 80686
Опубліковано: 25.10.2007
Автори: Лепескин Ігор Борисович, Кулігін Анатолій Михайлович, Дупліщева Ольга Михайлівна, Порубаймех Володимир Ілліч
МПК: G01L 27/00, G01C 5/00, G01M 9/00
Мітки: наземних, контролю, спрацьовування, статичного, траєкторії, приймача, гілці, тиску, літального, польоту, блока, випробуваннях, реле, пристрій, апарата, спадній
Формула / Реферат:
Пристрій для контролю спрацьовування блока реле тиску приймача статичного тиску літального апарата на спадній гілці траєкторії польоту при наземних випробуваннях, який містить робочу камеру, що має вакуумметр, приймач статичного тиску, випробуваний блок реле тиску, електричний нагрівник, що встановлено у вигляді спіралі, яка ізольована від корпусу приймача статичного тиску, термометр опору, датчик перепаду тиску, при цьому робоча камера...
Пристрій для контролю зміни положення електропровідної або магнітодіелектричної поверхні
Номер патенту: 65359
Опубліковано: 12.12.2011
Автори: Мовчанюк Андрій Валерійович, Закревський Олександр Францович
МПК: G01R 33/12
Мітки: зміни, електропровідної, контролю, магнітодіелектричної, поверхні, пристрій, положення
Формула / Реферат:
Пристрій для контролю зміни положення електропровідної або магнітодіелектричної поверхні, що містить сенсор у вигляді спіралеподібної пласкої котушки індуктивності, виготовленої як друкована плата, який відрізняється тим, що сенсор виконаний як група спіралеподібних пласких котушок, співвісно розміщених на заданій відстані одна від одної та виготовлених як багатошарова друкована плата, причому сенсор електрично зв'язаний з блоком вимірювання...
Попередній патент: Спосіб збирання олійного льону
Наступний патент: Теплоносій для сонячного колектора
Випадковий патент: Спосіб оцінки ефективності лікування хворих на ішемічну хворобу серця з артеріальною гіпертензією та цукровим діабетом нісолдипіном