Програмований лінійний приймач та спосіб забезпечення у приймачі програмованої лінійності
Номер патенту: 49094
Опубліковано: 16.09.2002
Автори: Кауфман Ральф Е., Сіккареллі Стівен С., Юніс Саїд Г.



Формула / Реферат
1. Програмований лінійний приймач, який включає:
- регульований елемент для прийому сигналу РЧ, який має вхід для керування коефіцієнтом передачі цього регульованого елемента,
- щонайменше один підсилювач, з'єднаний з зазначеним регульованим елементом, зі змінною зведеною до входу точкою перетину третього порядку, положення якої може регулюватись через вхід керування її зміщенням,
- демодулятор, з'єднаний з зазначеним щонайменше одним підсилювачем і призначений формувати дані основної частоти,
- з'єднану з зазначеним демодулятором схему вимірювання нелінійності,
- схему керування зміщенням, з'єднану з зазначеною схемою вимірювання нелінійності і з зазначеним входом керування зміщенням зазначеного щонайменше одного підсилювача з змінною зведеною до входу точкою перетину третього порядку, і
- схему керування підсиленням, з'єднану з зазначеним входом керування підсиленням зазначеного регульованого елемента.
2. Приймач за п. 1, який відрізняється тим, що зазначеним регульованим елементом є атенюатор.
3. Приймач за п. 1, який відрізняється тим, що зазначена схема вимірювання нелінійності вимірює нахил індикатора сили сигналу.
4. Приймач за п. 1, який відрізняється тим, що зазначена схема вимірювання нелінійності обчислює відношення енергії на елемент коду до шуму (Ес/Іо).
5. Приймач за п. 1, який відрізняється тим, що додатково має змішувач, встановлений між зазначеним щонайменше одним підсилювачем і зазначеним демодулятором, з входом керування зміщенням, з'єднаним з зазначеною схемою керування підсиленням.
6. Приймач за п. 1, який відрізняється тим, що додатково має перемикач, включений паралельно до зазначеного щонайменше одного підсилювача, з входом керування, з'єднаним з зазначеною схемою керування підсиленням.
7. Приймач за п. 6, який відрізняється тим, що додатково має атенюатор з фіксованим послабленням, з'єднаний послідовно з зазначеним перемикачем.
8. Спосіб забезпечення у приймачі програмованої лінійності, який включає операції:
- прийому вхідного сигналу РЧ,
- послаблення зазначеного сигналу РЧ до зумовленого рівня,
- підсилення зазначеного сигналу РЧ щонайменше одним підсилювачем, який має у складі активний елемент, для створення підсиленого сигналу РЧ,
- демодуляції зазначеного підсиленого сигналу РЧ для одержання вихідного сигналу,
- вимірювання рівня нелінійності у зазначеному вихідному сигналі і
- встановлення положення зведеної до входу точки перетину третього порядку згідно з зазначеним виміряним рівнем нелінійності.
9. Спосіб за п. 8, який відрізняється тим, що передбачає виконання зазначеної операції встановлення положення у порядку, який залежить від рівня шумів у зазначеному приймачі.
10. Спосіб за п. 8, який відрізняється тим, що передбачає виконання зазначеної операції встановлення положення у порядку, який залежить від рівнів сигналів від активних пристроїв у зазначеному приймачі.
11. Спосіб за п. 10, який відрізняється тим, що з підвищенням зазначеного сигналу РЧ у першу чергу передбачає збільшення зміщення зведеної до входу точки перетину третього порядку того активного пристрою, який має найвищий рівень вихідного сигналу.
12. Спосіб за п. 11, який відрізняється тим, що після збільшення зміщення зведеної до входу точки перетину третього порядку до зумовленого робочого положення у зазначеному активному пристрої, що має зазначений найвищий рівень вихідного сигналу, з підвищенням зазначеного сигналу РЧ у другу чергу передбачає збільшення зміщення зведеної до входу точки перетину третього порядку того активного пристрою, який має другий за значенням рівень вихідного сигналу.
13. Спосіб за п. 10, який відрізняється тим, що зі зниженням зазначеного сигналу РЧ у першу чергу передбачає зменшення зміщення робочої зведеної до входу точки перетину третього порядку активного пристрою, який має найнижчий рівень вихідного сигналу.
14. Спосіб за п. 13, який відрізняється тим, що після зниження зміщення зведеної до входу точки перетину третього порядку до зумовленого робочого положення у зазначеному активному пристрої, що має зазначений найнижчий рівень вихідного сигналу, зі зниженням зазначеного сигналу РЧ у другу чергу передбачає зменшення зміщення зведеної до входу точки перетину третього порядку того активного пристрою, який має другий за меншістю рівень вихідного сигналу.
15. Спосіб за п. 10, який відрізняється тим, що передбачає виконання зазначеної операції встановлення положення дискретними кроками.
16. Спосіб за п. 10, який відрізняється тим, що передбачає безперервне виконання зазначеної операції встановлення положення.
17. Спосіб за п. 8, який відрізняється тим, що зазначена операція вимірювання здійснюється вимірюванням нахилу індикатора сили зазначеного вихідного сигналу.
18. Спосіб за п. 8, який відрізняється тим, що зазначена операція вимірювання здійснюється вимірюванням відношення Ес/Іо зазначеного вихідного сигналу.
19. Спосіб за п. 17, який відрізняється тим, що додатково включає операцію порівняння зазначеного виміряного нахилу індикатора сили сигналу з порогом індикатора сили сигналу, а зазначена операція встановлення положення виконується згідно з результатом зазначеної операції порівняння.
20. Спосіб за п. 19, який відрізняється тим, що зазначений поріг індикатора сили сигналу відповідає бажаному рівню якості роботи зазначеного приймача.
21. Спосіб за п. 19, який відрізняється тим, що зазначений поріг індикатора сили сигналу становить 1,2.
22. Спосіб за п. 19, який відрізняється тим, що додатково включає операцію усереднення зазначеного виміряного значення нахилу індикатора сили сигналу протягом зумовленого періоду.
23. Спосіб за п. 22, який відрізняється тим, що тривалість зазначеного зумовленого періоду становить 5 мс.
24. Спосіб за п. 8, який відрізняється тим, що зазначена операція послаблення виконується періодичними імпульсами.
25. Спосіб за п. 24, який відрізняється тим, що тривалість зазначених імпульсів становить 200 мкс.
26. Спосіб за п. 8, який відрізняється тим, що зазначена операція послаблення передбачає зумовлений рівень послаблення 0,5 дБ.
27. Спосіб за п. 8, який відрізняється тим, що додатково включає операцію вимикання зазначеного щонайменше одного підсилювача, одного за раз, коли зазначений сигнал РЧ перевищує зумовлений поріг.
28. Спосіб за п. 27, який відрізняється тим, що коли зазначений сигнал РЧ перевищує зумовлений поріг, першим вимикається підсилювач, найближчий до входу зазначеного приймача.
29. Спосіб за п. 8, який відрізняється тим, що додатково включає операції:
- змішування у змішувачі, що містить активний пристрій, зазначеного підсиленого сигналу РЧ для одержання сигналу проміжної частоти, і
- фільтрування зазначеного сигналу проміжної частоти для одержання фільтрованого сигналу проміжної частоти,
причому зазначена операція демодуляції виконується над зазначеним фільтрованим сигналом проміжної частоти.
30. Спосіб за п. 29, який відрізняється тим, що з підвищенням зазначеного сигналу РЧ у першу чергу передбачає збільшення зміщення робочої зведеної до входу точки перетину третього порядку зазначеного змішувача.
31. Спосіб за п. 29, який відрізняється тим, що з зниженням зазначеного сигналу РЧ у передбачає зменшення зміщення робочої зведеної до входу точки перетину третього порядку зазначеного змішувача у останню чергу.
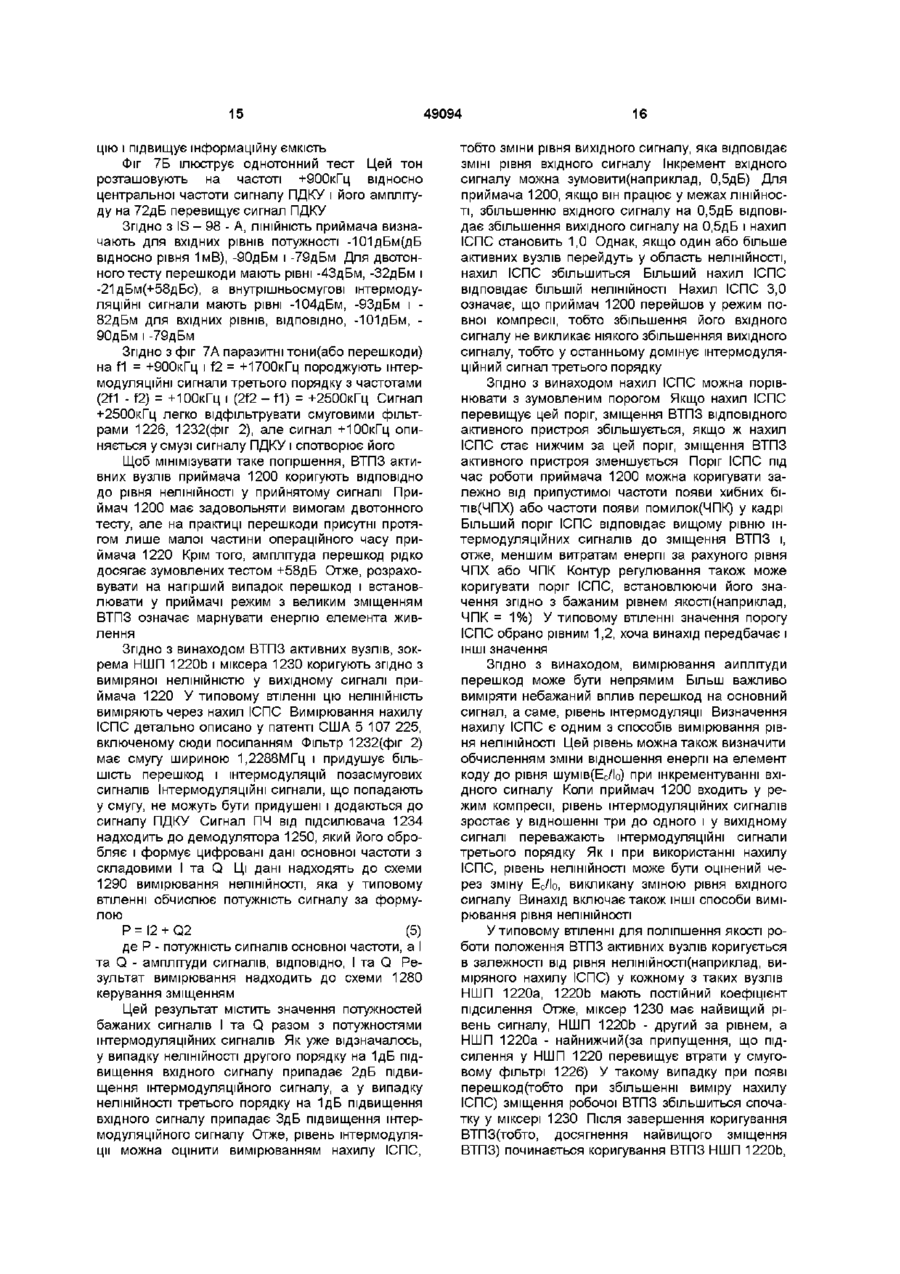
Текст
1 Програмований ЛІНІЙНИЙ приймач, який включає - регульований елемент для прийому сигналу РЧ, який має вхід для керування коефіцієнтом передачі цього регульованого елемента, - щонайменше один підсилювач, з'єднаний з зазначеним регульованим елементом, зі змінною зведеною до входу точкою перетину третього порядку, положення якої може регулюватись через вхід керування її зміщенням, - демодулятор, з'єднаний з зазначеним щонайменше одним підсилювачем і призначений формувати дані основної частоти, - з'єднану з зазначеним демодулятором схему вимірювання нелінійності, - схему керування зміщенням, з'єднану з зазначеною схемою вимірювання нелінійності і з зазначеним входом керування зміщенням зазначеного щонайменше одного підсилювача з змінною зведеною до входу точкою перетину третього порядку, І - схему керування підсиленням, з'єднану з зазначеним входом керування підсиленням зазначеного регульованого елемента 2 Приймач за п 1, який відрізняється тим, що зазначеним регульованим елементом є атенюатор 3 Приймач за п 1, який відрізняється тим, що зазначена схема вимірювання нелінійності вимірює нахил індикатора сили сигналу 4 Приймач за п 1, який відрізняється тим, що зазначена схема вимірювання нелінійності обчислює відношення енергії на елемент коду до шуму (Ес/Іо) 5 Приймач за п 1, який відрізняється тим, що додатково має змішувач, встановлений між зазначеним щонайменше одним підсилювачем і зазначеним демодулятором, з входом керування зміщенням, з'єднаним з зазначеною схемою керування підсиленням 6 Приймач за п 1, який відрізняється тим, що додатково має перемикач, включений паралельно до зазначеного щонайменше одного підсилювача, з входом керування, з'єднаним з зазначеною схемою керування підсиленням 7 Приймач за п 6, який відрізняється тим, що додатково має атенюатор з фіксованим послабленням, з'єднаний послідовно з зазначеним перемикачем 8 Спосіб забезпечення у приймачі програмованої ЛІНІЙНОСТІ, який включає операції - прийому вхідного сигналу РЧ, - послаблення зазначеного сигналу РЧ до зумовленого рівня, - підсилення зазначеного сигналу РЧ щонайменше одним підсилювачем, який має у складі активний елемент, для створення підсиленого сигналу РЧ, - демодуляції зазначеного підсиленого сигналу РЧ для одержання вихідного сигналу, - вимірювання рівня нелінійності у зазначеному вихідному сигналі і - встановлення положення зведеної до входу точки перетину третього порядку згідно з зазначеним виміряним рівнем нелінійності 9 Спосіб за п 8, який відрізняється тим, що передбачає виконання зазначеної операції встановлення положення у порядку, який залежить від рівня шумів у зазначеному приймачі 10 Спосіб за п 8, який відрізняється тим, що передбачає виконання зазначеної операції встановлення положення у порядку, який залежить від рівнів сигналів від активних пристроїв у зазначеному приймачі 11 Спосіб за п 10, який відрізняється тим, що з підвищенням зазначеного сигналу РЧ у першу чергу передбачає збільшення зміщення зведеної до входу точки перетину третього порядку того актив о о 49094 ного пристрою, який має найвищий рівень вихідного сигналу 12 Спосіб за п 11, який відрізняється тим, що після збільшення зміщення зведеної до входу точки перетину третього порядку до зумовленого робочого положення у зазначеному активному пристрої, що має зазначений найвищий рівень вихідного сигналу, з підвищенням зазначеного сигналу РЧ у другу чергу передбачає збільшення зміщення зведеної до входу точки перетину третього порядку того активного пристрою, який має другий за значенням рівень вихідного сигналу 13 Спосіб за п 10, який відрізняється тим, що зі зниженням зазначеного сигналу РЧ у першу чергу передбачає зменшення зміщення робочої зведеної до входу точки перетину третього порядку активного пристрою, який має найнижчий рівень вихідного сигналу 14 Спосіб за п 13, який відрізняється тим, що після зниження зміщення зведеної до входу точки перетину третього порядку до зумовленого робочого положення у зазначеному активному пристрої, що має зазначений найнижчий рівень вихідного сигналу, зі зниженням зазначеного сигналу РЧ у другу чергу передбачає зменшення зміщення зведеної до входу точки перетину третього порядку того активного пристрою, який має другий за меншістю рівень вихідного сигналу 15 Спосіб за п 10, який відрізняється тим, що передбачає виконання зазначеної операції встановлення положення дискретними кроками 16 Спосіб за п 10, який відрізняється тим, що передбачає безперервне виконання зазначеної операції встановлення положення 17 Спосіб за п 8, який відрізняється тим, що зазначена операція вимірювання здійснюється вимірюванням нахилу індикатора сили зазначеного вихідного сигналу 18 Спосіб за п 8, який відрізняється тим, що зазначена операція вимірювання здійснюється вимірюванням відношення Ес/І0 зазначеного вихідного сигналу 19 Спосіб за п 17, який відрізняється тим, що додатково включає операцію порівняння зазначеного виміряного нахилу індикатора сили сигналу з порогом індикатора сили сигналу, а зазначена операція встановлення положення виконується згідно з результатом зазначеної операції порівняння 20 Спосіб за п 19, який відрізняється тим, що зазначений поріг індикатора сили сигналу відповідає бажаному рівню якості роботи зазначеного приймача 21 Спосіб за п 19, який відрізняється тим, що зазначений поріг індикатора сили сигналу становить 1,2 22 Спосіб за п 19, який відрізняється тим, що додатково включає операцію усереднення зазначеного виміряного значення нахилу індикатора сили сигналу протягом зумовленого періоду 23 Спосіб за п 22, який відрізняється тим, що тривалість зазначеного зумовленого періоду становить 5 мс 24 Спосіб за п 8, який відрізняється тим, що зазначена операція послаблення виконується періодичними імпульсами 25 Спосіб за п 24, який відрізняється тим, що тривалість зазначених імпульсів становить 200 мкс 26 Спосіб за п 8, який відрізняється тим, що зазначена операція послаблення передбачає зумовлений рівень послаблення 0,5 дБ 27 Спосіб за п 8, який відрізняється тим, що додатково включає операцію вимикання зазначеного щонайменше одного підсилювача, одного за раз, коли зазначений сигнал РЧ перевищує зумовлений поріг 28 Спосіб за п 27, який відрізняється тим, що коли зазначений сигнал РЧ перевищує зумовлений поріг, першим вимикається підсилювач, найближчий до входу зазначеного приймача 29 Спосіб за п 8, який відрізняється тим, що додатково включає операції - змішування у змішувачі, що містить активний пристрій, зазначеного підсиленого сигналу РЧ для одержання сигналу проміжної частоти, і - фільтрування зазначеного сигналу проміжної частоти для одержання фільтрованого сигналу проміжної частоти, причому зазначена операція демодуляції виконується над зазначеним фільтрованим сигналом проміжної частоти 30 Спосіб за п 29, який відрізняється тим, що з підвищенням зазначеного сигналу РЧ у першу чергу передбачає збільшення зміщення робочої зведеної до входу точки перетину третього порядку зазначеного змішувача 31 Спосіб за п 29, який відрізняється тим, що з зниженням зазначеного сигналу РЧ у передбачає зменшення зміщення робочої зведеної до входу точки перетину третього порядку зазначеного змішувача у останню чергу Конструювання високоякісного приймача пов'язане з подоланням різних конструкційних обмежень По-перше ВИСОКОЯКІСНІ приймачі знаходять широкий попит Високу якість можна визначити як ЛІНІЙНІСТЬ його активних вузлів(наприклад, підсилювачів, міксерів тощо) і низький рівень шумів Подруге, у деяких системах, наприклад, стільникових системах зв'язку споживання потужності є важливим фактором, зумовленим портативністю при имача Активний пристрій має передаточну функцію у(х) = а1Х +а2х2 +аЗХЗ + члени (1) вищого порядку де х - вхідний сигнал, у(х) - вихідний сигнал, а а1 а2, аЗ - коефіцієнти, що визначають ЛІНІЙНІСТЬ активного пристроя Для спрощення члени вищого порядку, тобто порядку вище третього, відкинуто У ідеальному активному пристрої коефіцієнти а2, 49094 аЗ дорівнюють 0, а вихідним сигналом є вхідний, масштабований коефіцієнтом а1 Однак, усі активні пристрої мають деяку нелінійність, визначену коефіцієнтами а2, аЗ Коефіцієнт а2 визначає неЛІНІЙНІСТЬ другого порядку, а коефіцієнт аЗ - неліНІЙНІСТЬ третього порядку БІЛЬШІСТЬ систем зв'язку є вузькосмуговими системами, у яких ВХІДНІ радючастотні(РЧ) сигнали є сигналами з заздалегідь визначеними шириною смуги і центральною частотою Звичайно вхідний РЧ сигнал містить ІНШІ, паразитні сигнали, розташовані по спектру частот Нелінійність активного пристроя призводить до інтермодуляцм паразитних сигналів і утворення сигналів, що можуть опинитись у смузі основного сигналу Вплив нелінійності другого порядку(викликаноі членом х2) можна звичайно знизити або усунути належним вибором методики проектування Така нелінійність породжує сигнали суми і різниці частот Звичайно паразитні сигнали, що можуть створити у основній смузі вияви другого порядку, лежать далеко за межами смуги сигналу і можуть бути відфільтровані Однак, нелінійність третього порядку створює проблеми Паразитні сигнали нелінійності третього порядку х = g1cos(w1t) + g2cos(w2t) породжують перешкоди на частотах (2w1 - w2) і (2w2 - w1) Отже паразитні сигнали, що лежать поблизу основної смуги(і тому їх важко відфільтрувати) можуть у смузі основного сигналу створити сигнали інтермодуляцм третього порядку, які спотворять основний сигнал Проблему ускладнює те, що амплітуда перешкод третього порядку масштабована коефіцієнтами g1g22 та g12g2 Отже, кожне подвоєння амплітуди паразитних сигналів викликає восьмиразове збільшення амплітуди сигналів третього порядку Інакше кажучи, кожний 1дБ підвищення амплітуди вхідних РЧ сигналів підвищує на ІдБ амлітуду вихідного РЧ сигналу і на ЗдБ амплітуду сигналів третього порядку ЛІНІЙНІСТЬ приймача(або активного пристроя) можна характеризувати зведеною до входу точкою перетину третього порядку(ВТПЗ) Звичайно вихідний РЧ сигнал і штермодуляційні сигнали третього порядку наносять на графік у функції вхідного РЧ сигналу Тоді ВТПЗ - це теоретична точка, де бажаний вихідний РЧ сигнал і сигнали третього порядку стають рівними за амплітудою(перетинаються) ВТПЗ є екстрапольованим значенням, оскільки активний пристрій входить у режим компресії ще до досягнення ВТПЗ Для приймача з кількома каскадами активних вузлів, ВТПЗ приймача від першого активного вузла до п го вузла може бути обчислена за формулою ВТПЗп = -ЮІодЮИО-ВТПЗп - 1/10 +, (2) 10(Avn-BTn3dn)/10] де ВТПЗп - зведена до входу точка перетину третього порядку від першого до п - го активного вузла, ВТПЗп - 1 - зведена до входу точка перетину третього порядку від першого до п - 1 - го активного вузла, Avn - підсилення п - го вузла, BTn3dn - зведена до входу точка перетину третього порядку п - го вузла Усі дані наведено у дБ Обчислення за формулою(2) може бути виконане послідовно для ПОСЛІДОВНОСТІ вузлів З рівняння(2) можна бачити, що одним з шляхів поліпшення каскадного ВТПЗ приймача є зменшення підсилення перед першим нелінійним активним пристроєм Однак, кожний активний пристрій також генерує теплові шуми, які погіршують якість сигналу Оскільки рівень шумів залишається на постійному рівні, погіршення збільшується з зниженням підсилення і амплітуди сигналу Погіршення можна визначити КІЛЬКІСНО вимірюванням рівня шумів(РШ) активного пристроя РШсі = СШВХ-СШВИХ (3) де PLUd - рівень шумів активного пристроя, СШВХ - відношення сигнал/шув вхідного РЧ сигналу, СШвих - відношення сигнал/шув вихідного РЧ сигналу активного пристроя(усі дані у дБ) Для приймача, що має кілька активних пристроїв, з'єднаних каскадно, рівень шумів від першого до п - го каскаду можна обчислити за формулою РШп = 10ІодЮ[10(РШп - 1/10 + (4) (10(PUJdn/10) - 1)/10(Gn -1/10) де РШп - рівень шумів від першого до п - го вузла, РШп - І - рівень шумів від першого до п - 1 го вузла, PLUdn - рівень шумів п - го вузла і Gn - 1 і - повне підсилення вузлів від першого до п - 1 - го у дБ Як показано у рівнянні(4), підсилення активного пристроя може впливати на рівень шумів подальших каскадів Подібно до ВТПЗ обчислення за формулою(4) може бути виконане послідовно для ПОСЛІДОВНОСТІ вузлів Приймачі застосовують у багатьох системах зв'язку, зокрема, у стільникових системах і телебаченні високого розрізнення Прикладами стільникової системи може бути система звязку з паралельним доступом і кодовим ущільненням каналів(ПДКУ), система з розділенням часу, аналогова система з ЧМ Використання ПДКУ описано у патентах США 4 901 307 і 5 103 459, включених сюди посиланням Приклади телевізійної системи високого розрізнення можна знайти у патентах США 5 452 104, 5 107 345, 5 021 891 і 5 576 767, включених сюди посиланням У стільникових застосуваннях звичайно викристовують кілька стільникових систем, які працюють у одному географічному регіоні у однакових або близьких смугах частот У таких випадках передача від одної системи може заважати прийому сигналу у другій системі Система ПДКУ є системою розширеного спектру, яка розподіляє потужність передачі по усій смузі частот шириною 1,2288МГц Спектр передачі з ЧМ є більш вузьким і така передача може створювати перешкоду усередині смуги ПДКУ дуже близько до сигналу ПДКУ під час його прийому Амплітуда таких перешкод може перевищувати сигнал ПДКУ у багато разів і вони можуть створювати сигнали інтермодуляцм третього порядку, які можуть погіршити роботу системи ПДКУ Звичайно для мінімізації такого погіршення у приймачі забезпечують високе зміщення ВТПЗ Однак, у такому приймачі активним вузлам необхідно надавати зміщення постійним струмом, що вимагає великих витрат потужності Таке рішення є особливо небажаним у стільникових системах, у яких приймач є портативним і потужність його обмежена 49094 Для досягнення великого зміщення ВТПЗ було запропоновано кілька рішень Одним з них, у якому до того ж зроблено спробу мінімізувати споживання потужності, є застосування підсилювального каскаду з кількома підсилювачами, з'єднаними паралельно, і селективне їх активування у випадку потреби високої ВТПЗ Це рішення описано у заявці 08/843 904 на патент США від 17/04/1997, включеній сюди посиланням Інше рішення засновано на вимірюванні потужності прийнятого РЧ сигналу і коригування підсилення підсилювачів залежно від результатів вимірювання Це рішення описано у заявці 08/723 491 на патент США від 30/09/1996, включеній сюди посиланням Ці рішення поліпшують ВТПЗ, але недостатньо знижують споживання потужності і не знижують складності схем Блок - схему типового підсилювача, що відповідає існуючому рівню техніки, наведено на фіг 1 У приймачі 1100 антена 1112 приймає РЧ сигнал, який через антенний перемикач 1114 надходить до низькошумового підсилювача(НШП) 1116 НШП 1116 підсилює РЧ сигнал і надсилає його до смугового фільтра 1118, який його фільтрує для усунення деяких паразитних складових, що можуть створити штермодуляцію у подальших каскадах Далі сигнал надходить до міксера 1120, який знижує його частоту до проміжноі(ПЧ), використовуючи синусоїдальний сигнал від локального генератора 1122 Сигнал ПЧ далі надходить до смугового фільтра 1124, який відфільтровує паразитні сигнали, що є продуктом зниження частоти, перед подальшим зниженням частоти Фільтрований сигнал ПЧ далі надходить до підсилювача 1126 з автоматичним регулюванням підсилення(АРП), який підсилює його з ЗМІННІМ коефіцієнтом підсилення, щоб одержати сигнал ПЧ бажаної амплітуди Підсилення регулюється керуючим сигналом від схеми 1128 АРП Після ЦЬОГО сигнал ПЧ надходить до демодулятора 1130, який демодулює його згідно з форматом модуляції, застосованим у передавачі Для цифрових передач використовують, наприклад, бінарно - фазову мані пуля цію(БФМ), чотирипозиційну фазову маніпуляцію(ЧФМ), зсунуту квадратурно - фазову маніпуляцію(ЗКФМ) і квадратурно - амплітудну модуляцію(КАМ) Цифровий демодулятор забезпечує цифрові дані основної смуги У системах з ЧМ частотний демодулятор забезпечує аналоговий сигнал Приймач 1100 має основні функціональні вузли, властиві більшості приймачів Однак, місцеположення підсилювачів 116, 1126, фільтрів 1118, 1124 і міксера 1120 можуть бути змінені згідно з обраною архітектурою У даному приймачі велике зміщення ВТПЗ забезпечується зміщенням у активних вузлах великим постійним струмом і/або регулюванням підсилення підсилювача 1126 Така архітектура приймача має кілька вад Поперше, для досягнення найвищої ВТПЗ у активних вузлах уведено зміщення великим постійним струмом Це поліпшує роботу приймача 1100 в усіх режимах, хоча така ВТПЗ потрібна не завжди По-друге, зміщення ВТПЗ може бути підвищене коригуванням підсилення підсилювача 1126 з АРП, як це описано у вже згаданому патенті 5 099 204 8 Однак, зниження підсилення підсилювача 1126 погіршує рівень шумів у приймачі 1100 Предметом винаходу є новий, удосконалений програмований ЛІНІЙНИЙ підсилювач, який забезпечує необхідний рівень якості роботи системи і має знижене споживання потужності У типовому втіленні приймач включає атенюатор, щонайменше один підсилювач з фіксованим підсиленням, міксер, і демодулятор Кожний підсилювач має шунтуючий ланцюг, який складається з атенюатора з фіксованим послабленням(далі - АФП) і перемикача У типовому втіленні підсилювачі і міксер утворюють активні вузли, ВТПЗ яких можуть бути індувідуально кориговані сигналами керування зміщенням Бажане АРП забезпечується атенюатором, підсилювачами, АФП і демодулятором Задачею винаходу є створення програмованого ЛІНІЙНОГО підсилювача з мінімальним споживанням енергії на основі вимірювання нелінійності вихідного сигналу приймача У типовому втіленні рівень нелінійності вимірюється індикатором сили прийнятого сигналу(ІСПС) з використанням метода нахилу Нахил ІСПС є відношенням зміни вихідного плюс штермодуляційного сигналів до зміни вхідного сигналу У типовому втіленні вхідний сигнал періодично підвищують на зумовлене значення і виміряють вихідний сигнал приймача Вихідний сигнал містить бажаний сигнал і штермодуляЦІЙНІ складові, породжені нелінійністю приймача Коли приймач працює ЛІНІЙНО, одному дБ підвищення вхідного сигналу відповідає 1дБ підвищення вихідного Однак, якщо приймач входить у область нелінійності, штермодуляційні складові, породжені нелінійністю приймача, ростуть швидше, ніж бажаний сигнал Виміряючи нахил ІСПС, можна визначити рівень спотворення, викликаного нелінійністю Ця інформація потім використовується для коригування робочої ВТПЗ підсилювачів і міксера і забезпечення цим бажаного рівня якості і мінімума споживання енергії Рівень нелінійності можна також оцінити, виміряючи, наприклад, відношення енергії на елемент коду до шуму(Ес/Іо) Іншою задачею винаходу є створення програмованого ЛІНІЙНОГО приймача, у якому мінімізація споживання енергії здійснюється в залежності від режима роботи приймача Кожному режиму роботи приймача відповідає вхідний сигнал з певними унікальними характеристиками(наприклад, сигнали ПДКУ, ЧМ тощо) і кожний режим визначається певними функціональними вимогами У типовому втіленні контролер приймача знає режим роботи і пов'язані з ним параметри компонентів приймача, які забезпечують бажане функціонування Наприклад, режим ПДКУ вимагає високого зміщення ВТПЗ і коли приймач працює цьому режимі, активним вузлам встановлюються ВІДПОВІДНІ зміщення На відміну від цього режим ЧМ ставить менш суворі вимоги і у цьому режимі зміщення можуть бути такими, що забезпечують нижчі ВТПЗ Ще одною задачею винаходу є створення програмованого ЛІНІЙНОГО приймача, у якому споживання енергії мінімізується залежно від віміряного рівня сигналу у різних каскадах приймача До виходів обраних компонентів можуть бути приєднані вимірювачі потужності для виконання ВІДПОВІ 49094 дних вимірювань Результати цих вимірювань використовуються для коригування робочої ВТПЗ будь-якого компонента згідно з зумовленим рівнем НЄЛІНІЙНОСТІ Особливості, задачі і переваги винаходу наведено у подальшому детальному описі з посиланнями на креслення, у яких фіг 1 - блок - схема типового приймача згідно з існуючим рівнем техніки, фіг 2 - блок - схема типового програмованого ЛІНІЙНОГО приймача згідно з винаходом, фіг - блок - схема типового програмованого ЛІНІЙНОГО двосмугового приймача згідно з винаходом, фіг 4 - блок - схема типового демодулятора ЗКФМ приймача згідно з винаходом, фіг 5А, 5Б - принципові схеми типового неінтегрального НШП і джерела струму для приймачів згідно з винаходом, фіг 6А, 6Б - графіки залежності ВТПЗ від зміщуючого струму транзистора у НШП і криві роботи НШП, ВІДПОВІДНО, фіг 7А, 7Б - характеристики двотонної і однотонної перешкод для сигналу ПДКУ згідно з IS - 98 - А, ВІДПОВІДНО, фіг 8А, 8Б - межі керування АРП при зниженні і підвищенні вхідної потужності сигналу ПДКУ, ВІДПОВІДНО, фіг 9 - діаграми, що ілюструють типове керування зміщенням ВТПЗ згідно з винаходом, фіг 10А, 10Б - діаграми, що ілюструють типове керування зміщенням ВТПЗ при зниженні і підвищенні вхідної потужності сигналу ПДКУ, ВІДПОВІДНО Приймач згідно з винаходом забезпечує необхідний рівень функціонування системи і мінімізує споживання енергії керуванням зміщуючим постійним струмом у активних вузлах Винахід може бути застосований у трьох втіленнях, детально описаних нижче Згідно З першим втіленням передбачено вимірювання рівня нелінійності на виході приймача і використання результатів для встановлення робочої ВТПЗ у таких активних вузлах, як підсилювач і міксер У другому втіленні робоча ВТПЗ активних вузлів встановлюється згідно з очікуваним рівнем вхідного сигналу, який визначається режимом роботи приймача У третьому втіленні робоча ВТПЗ активних вузлів встановлюється згідно з виміряним рівнем сигналу у різних каскадах приймача Згідно З винаходом АРП здійснюється схемою АРП, яка працює разом з схемою керування зміщенням Робоча ВТПЗ активних вузлів встановлюється згідно з виміряним рівнем нелінійності, який залежить від рівня сигналу Амплітуда сигналу, у свою чергу, залежить від коефіцієнтів підсилення, встановлених у приймачі Згідно з винаходом, АРП і керування зміщенням здійснюються інтегровано для забезпечення належного рівня нелінійності у межах АРП і мінімізації споживання енергії І Архітектура приймача На фіг 2 наведено типову архітектуру приймача згідно з винаходом У приймачі 1200 антена 1212 приймає переданий РЧ сигнал, який потім надходить через антенний перемикач 1214 до 10 атенюатора 1216 Атенюатор 1216 послаблює амплітуду РЧ сигналу до бажаного рівня і надсилає його до процесора 1210 РЧ, у якому сигнал проходить до АФП 1222а і НШП 1220а, який підсилює РЧ сигнал і надсилає його до смугового фільтра 1226 АФП забезпечує зумовлений рівень послаблення і з'єднаний послідовно з перемикачем 1224а, який створює шунтуючий ланцюг для НШП 1220а у випадках, коли підсилення не потрібне Смуговий фільтр 1226 фільтрує сигнал для видалення паразитних складових, які можуть викликати штермодуляцію у подальших каскадах обробки сигналу, і надсилає фільтрований сигнал до АФП 1222b і НШП 1220b НШП 1220b підсилює сигнал і надсилає його до процесора 1248 РЧ/ПЧ АФП 1222b послаблює сигнал до зумовленого рівня і разом з перемикачем 1224b утворює шунтуючий ланцюг для НШП 1220b у випадках, коли його підсилення не потрібне У процесорі 1248 РЧ/ПЧ міксер 1230 знижує частоту сигналу до проміжної, використовуючи синусоїдальний сигнал від локального генератора(ЛГ) 1228 Далі сигнал надходить до смугового фільтра 1232, який відфільтровує паразитні і позасмугові сигнали, що виникли під час зниження частоти У бажаному втіленні фільтрований сигнал ПЧ надходить до керованого підсилювача 1234 напруги(КПН), який має змінний коефіцієнт підсилення, що визначається АРП, і підсилює сигнал Згідно з винаходом підсилювач 1234 залежно від вимог системи може також мати постійний коефіцієнт підсилення Підсилений сигнал ПЧ надходить до демодулятора 1250, який демодулює сигнал згідно з модуляційним форматом, використаним передавачем Процесор РЧ 1210 і процесор 1248 РЧ/ПЧ називають разом переднім вузлом Фіг 4 містить блок - схему типового демодулятора 1250, що використовується для демодуляції квадратурно модульованих(наприклад, КФМ, ЗКФМ, КАМ) сигналів У типовому втіленні демодулятор 1250 є смуговим демодулятором з субдискретизацією РЧ сигнал надходить до смугового сигма - дельта АЦП(ЕД АЦП) 1410, який квантує сигнал з високою частотою дискретизації, яка визначається сигналом CLK Приклад ЕД АЦП описано у заявках 08/928 874 від 12/09/1997 та 08/987 306 від 9/12/1997 на патент США, включених сюди посиланням Квантований сигнал надходить до фільтра 1412, який фільтрує і проріджує його і надсилає до помножувачів 1414а, 1414b, які знижують його частоту до основної частоти, використовуючи фазну і квадратурно - фазну синусоїди від локального генератора(Л Г2) 1420 і фазозсувач 1418 Фазозсувач зсуває фазу на 90°, створюючи квадратурну синусоїду Сигнали І та Q основної частоти надходять, ВІДПОВІДНО, ДО фільтрів 1416а, 1416b, які фільтрують сигнал, формуючі дані І та Q Дані основної частоти фіг 2 складаються з даних І, Q фіг 4 У типовому втіленні фільтр 1412 і/або фільтри 1416 нижніх частот виконують також масштабування сигналу, щоб створити для демодулятора 1250 можливість генерувати дані різних амплітуд Винахід включає також демодулятори інших типів, здатні демодулювати сигнали з ЗКФМ Приймач 1200(фіг 2) має основні функцюна 11 льні вузли, властиві більшості приймачів Однак, розташування атенюатора 1216, НШП 1220а, 1220b, фільтрів 1226, 1232 і міксера 1230 можуть бути змінені для оптимізацм роботи приймача згідно з конкретними вимогами Наприклад, атенюатор 1216 може бути встановлений між НШП 1220а і фільтром 1226 для зниження рівня шумів, а фільтр може бути встановлений перед НШП 1220а для видалення паразитних сигналів перед першим каскадом підсилення Винахід включає також ІНШІ конфігурації функціональних блоків, а також сполучення таких кофгурацм з відомими фахівцям Згідно З винаходом атенюатор 1216, перемикачі 1224а, 1224b і демодулятор 1250 працюють під керуванням схеми АРП 1260, яке забезпечує підтримання бажаної амплітуди вихідного сигналу ПЧ від підсилювача 1234 АРП детально описано далі Утиповому втіленні НШП 1220а, 1220b є підсилювачами з постійним коефіцієнтом підсилення НШП 1220а, 1220b і міксер 1230 працюють під керуванням схеми 1280 керування зміщенням, яка коригує постійний струм зміщення і/або напруги цих активних вузлів таким чином, щоб досягти бажаної ЛІНІЙНОСТІ з мінімальним споживанням енергії Механізм керування змінною ВТПЗ описано нижче Архітектура приймача згідно з винаходом може бути адаптована для різних використань, включаючи СТІЛЬНИКОВІ телефони і телебачення високого розрізнення У стільниковому телефоні приймач 1200 можна пристосувати для ПДКУ у смузі персональної системи зв'язку(ПСЗ) або у СТІЛЬНИКОВІЙ смузі Блок - схему типового приймача, здатного працювати у двох смугах і двох режимах(ПДКУ і УМТО(Удосконалене Мобільне Телефонне Обслуговування)) наведено на фіг 3 Смуга ПСЗ має ширину 60МГц на центральній частоті 1900МГц Стільникова смуга має ширину 25МГц на центральній частоті 900МГц Для кожної смуги має бути передбачений окремий фільтр РЧ і, отже, два окремі процесори Приймач 1300 включає багато з компонентів приймача 1200(фіг 2) Антена 1312, антенний перемикач 1314 і атенюатор 1316 ідентичні антені 1212, антенному перемикачу 1214 і атенюатору 1216 приймача 1200 Послаблений сигнал від атенюатора 1316 надходить до процесорів 1310а, 1310b РЧ Процесор 1310а призначений працювати у СТІЛЬНИКОВІЙ смузі, а процесор 1310b - у смузі ПСЗ РЧ процесор 1310а є ідентичним процесору 1210 і включає два каскади НШП 1320а, 1320b і смуговий фільтр 1326 між ними Кожний НШП має паралельний ланцюг з АФП 1322 і перемикача 1324 РЧ процесор 1310b є ідентичним процесору 1310а зтою різницею, що НШП 1321а, 1321b і смуговий фільтр 1327 призначено для смуги ПСЗ ВИХІДНІ сигнали процесорів 1310а, 1310b надходять до мультиплексора 1346, який обирає бажаний сигнал згідно з керуючим сигналом від контролера 1370(не показаного) Від мультиплексора 1346 сигнал надходить до процесора 1348 РЧ/ПЧ, ідентичного процесору 1248 фіг 2 Від процесора 1348 РЧ/ПЧ сигнал ПЧ надходить до демодулятора(ДЕМОД) 1350, який демодулює сигнал згідно з 49094 12 демодуляційним форматом, використаним віддаленим передавачем(не показаним) Демодулятор 1350, схема АРП 1360, схема 1380 керування зміщенням і схема 1390 вимірювання нелінійності (фіг 3) є ідентичними демодулятору 1250, схемі АРП 1260, схемі 1280 керування зміщенням і схемі 1290 вимірювання нелінійності фіг 2 Контролер 1370 має зв'зок з схемою АРП 1360, схемою 1380 керування зміщенням і мультиплексором 1346 і керує роботою цих вузлів Він може бути виконаний як мікропроцесор, мікроконтролер або процесор цифрових сигналів, програмований на виконання описаних функцій, і може мати елемент пам'яті для запам'ятовування робочих режимів приймача 1300 і ВІДПОВІДНИХ керуючих сигналів Фіг 2 ілюструє типовий приймач 1200, призначений для використання у стільниковому телефоні У типовому втіленні атенюатор має діапазон послаблення 20дБ і забезпечує послаблення від 0,2дБ до -20дБ Він може бути виготовлений на основі пари ДІОДІВ або на польовому транзисторі, як це відомо фахівцям НШП 1220а, 1220b мають постійний коефіцієнт підсилення 13дБ і можуть бути інтегральними безкорпусними підсилювачами РЧ або можуть бути виготовлені з дискретних компонентів Типову схему НШП 1220 описано нижче Утиповому втіленні АФП 1222а, 1222b забезпечують послаблення 5дБ і можуть бути побудовані на резисторах Смуговий фільтр 1226 шириною 25МГц і центральною частотою 900МГц є фільтром на основі акустичної поверхневої хвилі(АПХ) Утиповому втіленні смуговий фільтр 1232 також є фільтром АПХ і має ширину 1,2288МГц, тобто смугу систем ПДКУ, на центральній частоті 116,5МГц Міксер 1230 є активним безкорпусним елементом, наприклад, типу Motorola MC13143 або іншого типу, відомого фахівцям Він може бути також побудований на пасивних компонентах, наприклад, на подвійно збалансованих діодах Підсилювач 1234 може бути інтегральним або побудованим на дискретних елементах У типовому втіленні підсилювач 1234 забезпечує підсилення 40дБ У типовому втіленні повний коефіцієнт передачі приймача 1200(виключаючи демодулятор 1250) становить від 51дБ до -5дБ Цей діапазон ураховує типові втрати -ЗдБ у фільтрі 1226, підсилення 1дБ у міксері і втрати -13дБ у фільтрі 1232 Для компенсації втрат на шляху проходження, завмирання і перешкод сигналу ПДКУ необхідно, щоб типовий діапазон АРП становив 80дБ Діапазон АРП атенюатора 1216, НШП 1220а, 1220b і АФП 1222а, 1222b становить 56дБ, а решту 24дБ забезпечують демодулятор 1250 і/або підсилювач 1234 У демодуляторі 1250(фіг 4) схема 1410 АРП квантує аналоговий сигнал і надсилає цифровані значення до подальших блоків обробки цифрових сигналів Утиповому втіленні розрізнення для АРП має становити чотири біти, додаткові 6 біт утворюють поле для невідфільтрованих перешкоджаючих сигналів Схема АРП може мати розрізнення більше 10 біт, причому кожний біт після 10 може бути використаний і забезпечить 6дБ для регулювання підсилення При високих рівнях сигналу 13 ПДКУ рівні позасмугових перешкод не можуть перевищувати 72дБ, тобто при сильному сигналі ПДКУ поле для перешкоджаючого сигналу не перевищуватиме 6 біт У типовому втіленні схема АРП демодулятора діє лише при сильних сигналах ПДКУ, тобто на верхній межі регулювання Отже додаткові біти розрізнення, резервовані для перешкод, тепер можуть бути використані для АРП при високих рівнях сигналу ПДКУ Смуговий фільтр ТА АЦП з субдискретизацією описано у вже згаданій заявці 08/987 306 II Підсилювач Схему типового НШП на дискретних елементах наведено на фіг 5А Через вхідний конденсатор 1512 РЧ сигнал надходить до точки з'єднання шунтуючого на землю конденсатора 1514 і індуктивності 1516, другий кінець якої з'єднано з спільною точкою резисторів 1518 і 1520 Другий кінець резистора 1518 з'єднано з напругою Vdc живлення, а другий кінець резистора 1520 - з землею Конденсатор 1522 шунтує Vdc на землю У типовому втіленні транзистор 1540 є низькошумовим РЧ транзистором, наприклад, Siemens BFP420, який широко використовується у подібних схемах Емітер транзистора з'єднано з одним кінцем індуктивності 1542, другий кінець якої з'єднано з джерелом 1580 струму з заземленим другим кінцем Колектор транзистора з'єднано з спільною точкою резистора 1534, індуктивності 1532 і конденсатора 1536 Другі КІНЦІ резистора 1534 і індуктивності 1532 з'єднано з Vdc, а другий кінець конденсатора 1536 є виходом підсилювача Через конденсатори 1512 і 1536 проходять, ВІДПОВІДНО, вхідний і вихідний сигнали змінної напруги Конденсатор 1514 і індуктивність 1516 призначено для зниження шумів, а індуктивності 1516 і 1532 забезпечують узгодження, ВІДПОВІДНО, входу і виходу НШП Індуктивність 1532 також утворює шлях для зміщення постійним струмом транзистора 1540 Індуктивність 1542 збільшує імпеданс транзистора для підвищення ЛІНІЙНОСТІ Резистори 1518, 1520 створюють зміщення бази транзистора 1540, а резистор 1543 визначає підсилення НШП 1220 і вихідний опір Джерело 1580 визначає струм зміщення транзистора 1540 і, отже, ВТПЗ НШП 1220 Схему типового джерела 1580 струму наведено на фіг 5Б Витоки польових МОН - транзисторів 1582 та 1584 заземлено Стік транзистора 1584 з'єднано з кінцем резистора 1586, другий кінець якого з'єднаний з стоком транзистора 1582 і утворює вихід джерела 1580 струму Шунтуючий конденсатор 1588 з'єднує вихід джерела 1580 струму і землею До затвору транзистора 1582 надходить Vbiasi, до затвору транзистора 1584 - Vbias2 Транзистои 1582, 1584 є джерелом струму зміщення у колекторі транзистора 1540, який, у свою чергу, визначає робочу ВТПЗ НШП 1220 На затвори транзисторів 1582, 1584 подаються керуючі напруги Vbiasi, Vbias2 Коли Vbiasi низька(наприклад, Ов), транзистор 1582 вимикається і не створює струму у транзисторі 1540, висока напруга Vbiasi (наприклад, приблизно Vdc) вмикає транзистор 1582, який створює максимальний струм зміщення для транзистора 1540 Отже, на 49094 14 пруга Vbiasi визначає струм зміщення, що створюється транзистором 1582 Подібним чином напруга Vbias2 визначає струм зміщення, що створюється транзистором 1584 Напруга на базі транзистора 1540 і резистор 1586 обмежують максимальний струм зміщення у колекторі, створений транзистором 1584 ВТПЗ НШП 1220 у функції струму Ісс зміщення колектора наведено на фіг 6А Можна відзначити, що рівень ВТПЗ зростає приблизно на 6дБ на октаву зростання(подвоєння) струму зміщення колектора На фіг 6Б наведено струм зміщення у колекторі транзистора 1540, підсилення НШП 1220 і положення ВТПЗ НШП 1220 у функції керуючої напруги Vbiasi Можна відзначити, що підсилення залишається приблизно постійним(змша становить приблизно 1дБ для усіх напруг Vbiasi), a ВТПЗ змінюється, як у функції струму Ісс зміщення колектора Отже, якщо не потрібне велике зміщення ВТПЗ, струм зміщення колектора можна знизити без значної втрати підсилення НШП 1220 Фіг 5А, 5Б ілюструють типовий НШП 1220 і джерело 1580 струму НШП 1220 можна побудувати за іншою схемою, яка забезпечить необхідні параметри(наприклад, вище підсилення, нижчий рівень шумів, краще узгодження) і матиме ІНШІ активні компоненти, наприклад, біполярні транзистори, гетеробіполярні транзистори, метал-оксиднапівпровідник(МОН) - польові транзистори, арсенід-галіеві польові транзистори тощо НШП 1220 можна виконати як інтегральний підсилювач, відомий фахівцям Джерело 1580 струму також можна побудувати за іншою схемою Винахід включає різні варіанти НШП 1220 і джерела 1580 струму III Керування зміщенням ВТПЗ Як уже відзначалось паразитні сигнали, проходячи через нелінійні елементи, можуть створювати у внутрішньосмугові штермодуляційні сигнали Одною з систем, що вимагають високої ЛІНІЙНОСТІ, є система зв'язку з ПДКУ, суміщена з стільниковою системою іншого типу, наприклад, УМТО Такі ІНШІ системи можуть створювати паразитні сигнали(або перешкоди) високої потужності поблизу робочої смуги системи з ПДКУ, зумовлюючи цим необхідність у значному зміщенні ВТПЗ приймача ПДКУ Чутливість систем з ПДКУ до паразитних сигналів визначено двома тестами - двотонним і однотонним - у стандарті TIA/EIA/IS - 98 А(Послаблення паразитної штермодуляції) Фіг 7А ілюструє двотонний тест Два тони розташовано на частотах f1 = +900кГц і f2 = +1700кГц відносно центральної частоти сигналу ПДКУ Ці тони мають однакову амплітуду і на 58дБ перевищують сигнал ПДКУ Цей тест моделює ЧМ сигнал, що передається у суміжному каналі, як, наприклад, сигнал системи АМТО Такий сигнал несе більшу частину потужності на несучій частоті в той час, як потужність сигналу ПДКУ розподіляється по усій смузі 1,2288МГц Сигнал ПДКУ є менш чутливим до стану каналу проходження і утримується на низькому рівні потужності контуром регулювання потужності передачі Низький рівень потужності передачі у системі ПДКУ є необхідним для забезпечення належної якості роботи, оскільки знижує штерферен 15 49094 16 цію і підвищує інформаційну ємкість Фіг 7Б ілюструє однотонний тест Цей тон розташовують на частоті +900кГц відносно центральної частоти сигналу ПДКУ і його амплітуду на 72дБ перевищує сигнал ПДКУ Згідно з IS - 98 - А, ЛІНІЙНІСТЬ приймача визначають для вхідних рівнів потужності -101дБм(дБ відносно рівня 1мВ), -90дБм і -79дБм Для двотонного тесту перешкоди мають рівні -43дБм, -32дБм і -21дБм(+58дБс), а внутрішньосмугові інтермодуЛЯЦІЙНІ сигнали мають рівні -104дБм, -93дБм і 82дБм для вхідних рівнів, ВІДПОВІДНО, -101ДБМ, 90дБм і -79дБм Згідно З фіг 7А паразитні тони(або перешкоди) на f1 = +900кГц і f2 = +1700кГц породжують інтермодуляційні сигнали третього порядку з частотами (2f1 - f2) = +100кГц і (2f2 - f1) = +2500кГц Сигнал +2500кГц легко відфільтрувати смуговими фільтрами 1226, 1232(фіг 2), але сигнал +100кГц опиняється у смузі сигналу ПДКУ і спотворює його Щоб мінімізувати таке погіршення, ВТПЗ активних вузлів приймача 1200 коригують ВІДПОВІДНО до рівня нелінійності у прийнятому сигналі Приймач 1200 має задовольняти вимогам двотонного тесту, але на практиці перешкоди присутні протягом лише малої частини операційного часу приймача 1220 Крім того, амплітуда перешкод рідко досягає зумовлених тестом +58дБ Отже, розраховувати на напрший випадок перешкод і встановлювати у приймачі режим з великим зміщенням ВТПЗ означає марнувати енергію елемента живлення Згідно З винаходом ВТПЗ активних вузлів, зокрема НШП 1220b і міксера 1230 коригують згідно з виміряної нелінійністю у вихідному сигналі приймача 1220 У типовому втіленні цю нелінійність виміряють через нахил ІСПС Вимірювання нахилу ІСПС детально описано у патенті США 5 107 225, включеному сюди посиланням Фільтр 1232(фіг 2) має смугу шириною 1,2288МГц і придушує більшість перешкод і інтермодуляцій позасмугових сигналів Інтермодуляційні сигнали, що попадають у смугу, не можуть бути придушені і додаються до сигналу ПДКУ Сигнал ПЧ від підсилювача 1234 надходить до демодулятора 1250, який його обробляє і формує цифровані дані основної частоти з складовими І та Q Ці дані надходять до схеми 1290 вимірювання нелінійності, яка у типовому втіленні обчислює потужність сигналу за формулою тобто зміни рівня вихідного сигналу, яка відповідає ЗМІНІ рівня вхідного сигналу Інкремент вхідного сигналу можна зумовити(наприклад, 0,5дБ) Для приймача 1200, якщо він працює у межах ЛІНІЙНОСТІ, збільшенню вхідного сигналу на 0,5дБ відповідає збільшення вихідного сигналу на 0,5дБ і нахил ІСПС становить 1,0 Однак, якщо один або більше активних вузлів перейдуть у область нелінійності, нахил ІСПС збільшиться Більший нахил ІСПС відповідає більшій нелінійності Нахил ІСПС 3,0 означає, що приймач 1200 перейшов у режим повної компреси, тобто збільшення його вхідного сигналу не викликає ніякого збільшенняя вихідного сигналу, тобто у останньому домінує інтермодуляційний сигнал третього порядку Р = 12 + Q2 (5) де Р - потужність сигналів основної частоти, а І та Q - амплітуди сигналів, ВІДПОВІДНО, І та Q Результат вимірювання надходить до схеми 1280 керування зміщенням Цей результат містить значення потужностей бажаних сигналів І та Q разом з потужностями штермодуляційних сигналів Як уже відзначалось, у випадку нелінійності другого порядку на 1дБ підвищення вхідного сигналу припадає 2дБ підвищення інтермодуляційного сигналу, а у випадку нелінійності третього порядку на 1дБ підвищення вхідного сигналу припадає ЗдБ підвищення інтермодуляційного сигналу Отже, рівень інтермодуляцм можна оцінити вимірюванням нахилу ІСПС, У типовому втіленні для поліпшення якості роботи положення ВТПЗ активних вузлів коригується в залежності від рівня нелшійності(наприклад, виміряного нахилу ІСПС) у кожному з таких вузлів НШП 1220а, 1220b мають постійний коефіцієнт підсилення Отже, міксер 1230 має найвищий рівень сигналу, НШП 1220b - другий за рівнем, а НШП 1220а - найнижчий(за припущення, що підсилення у НШП 1220 перевищує втрати у смуговому фільтрі 1226) У такому випадку при появі перешкод (тобто при збільшенні виміру нахилу ІСПС) зміщення робочої ВТПЗ збільшиться спочатку у міксері 1230 Після завершення коригування ВТПЗ(тобто, досягнення найвищого зміщення ВТПЗ) починається коригування ВТПЗ НШП 1220b, Згідно З винаходом нахил ІСПС можна порівнювати з зумовленим порогом Якщо нахил ІСПС перевищує цей поріг, зміщення ВТПЗ ВІДПОВІДНОГО активного пристроя збільшується, якщо ж нахил ІСПС стає нижчим за цей поріг, зміщення ВТПЗ активного пристроя зменшується Поріг ІСПС під час роботи приймача 1200 можна коригувати залежно від припустимої частоти появи хибних бітів(ЧПХ) або частоти появи помилок(ЧПК) у кадрі Більший поріг ІСПС відповідає вищому рівню штермодуляційних сигналів до зміщення ВТПЗ і, отже, меншим витратам енергії за рахуного рівня ЧПХ або ЧПК Контур регулювання також може коригувати поріг ІСПС, встановлюючи його значення згідно з бажаним рівнем якості(наприклад, ЧПК = 1%) У типовому втіленні значення порогу ІСПС обрано рівним 1,2, хоча винахід передбачає і ІНШІ значення Згідно З винаходом, вимірювання аиплітуди перешкод може бути непрямим Більш важливо виміряти небажаний вплив перешкод на основний сигнал, а саме, рівень інтермодуляцм Визначення нахилу ІСПС є одним з способів вимірювання рівня нелінійності Цей рівень можна також визначити обчисленням зміни відношення енергії на елемент коду до рівня шумів(Ес/Іо) при шкрементуванні вхідного сигналу Коли приймач 1200 входить у режим компреси, рівень штермодуляційних сигналів зростає у відношенні три до одного і у вихідному сигналі переважають інтермодуляційні сигнали третього порядку Як і при використанні нахилу ІСПС, рівень нелінійності може бути оцінений через зміну Ес/Іо, викликану зміною рівня вхідного сигналу Винахід включає також ІНШІ способи вимірювання рівня нелінійності 17 49094 а після завершення цього коригування може бути збільшене зміщення ВТПЗ НШП 1220а Утиповому втіленні робоча ВТПЗ НШП 1220а підтримується у зумовленому положенні для оптимізацм роботи приймача 1200 ВІДПОВІДНО, за відсутності перешкод у першу чергу знижується зміщення ВТПЗ НШП 1220Ь(до найнижчого значення), і після завершення цього коригування здійснюється зменшення зміщення ВТПЗ міксера 1230 Зміщення ВТПЗ НШП 1220b і міксера можуть коригуватись безперервно(тобто з безперервною подачею керуючих напруг Vbiasi та Vbias2) або дискретними кроками Винахід передбачає як безперервне, так і дискретне керування, а також ІНШІ способи регулювання ВТПЗ активних вузлів Описаний порядок коригування ВТПЗ відповідає випадку, коли положення ВТПЗ є єдиним важливим фактором Однак, у інших випадках можуть існувати ІНШІ ВХІДНІ умови і різні вимоги до функціонування Порядок коригування ВТПЗ може бути ВІДПОВІДНО змінений, навіть може бути змінений напрямок цього коригування (наприклад, зменшенням зміщення ВТПЗ при зростанні рівня вхідного сигналу) для оптимізацм роботи приймача 1200 згідно з конкретними умовами роботи Винахід включає також ІНШІ порядки і напрямки коригування ВТПЗ IV Регулювання підсилення БІЛЬШІСТЬ приймачів розраховано на широкий діапазон рівнів вхідного сигналу Для приймачів ПДКУ номінальний діапазон АРП становить 80дБ Утиповому втіленні(фіг 2) діапазон АРП забезпечується атенюатором 1216, НШП 1220а та 1220b, АФП 1222а та 1222b, демодулятором 1250 і, можливо, підсилювачем 1234 При цьому атенюатор забезпечує діапазон АРП 20дБ, АФП 1222а, 1222b - 5дБ кожний, НШП 1220а, 1220 - 13дБ кожний і підсилювач 1234 і/або демодулятор 1250 - 24дБ Винахід передбачає і ІНШІ діапазони АРП для одного або кількох з цих компонентів Крім того, підсилювач 1234 може бути пристосований забезпечувати діапазон АРП для доповнення діапазонів АРП інших компонентів Наприклад, можна знизити діапазон АРП у АФП 1222 до 2дб і збільшити діапазон АРП підсилювача 1234 до 6дБ V типовому втіленні перші 2дБ діапазону АРП забезпечуються демодулятором 1250, який включає Х д АЦП, що забезпечує додаткові біти розрізненя, які можуть бути використані схемою АРП Наступні 20дБ діапазону АРП забезпечуються атенюатором 1216 і/або підсилювачем 1234 Наступні 18дБ діапазону АРП забезпечуються НШП 1220а і АФП 1222а, подальші 18дБ - НШП 1220b і АФП 1222b і останні 22дБ - підсилювачем 1234 і/або демодулятором 1250 Фіг 8А МІСТИТЬ схему, що ілюструє роботу типової схеми АРП у приймачі 1200 при ПІДЙОМІ потужності вхідного сигналу ПДКУ У цьому прикладі підсилювач 1234 для спрощення має постійний коефіцієнт підсилення Рівень потужності вхідного сигналу ПДКУ може змінюватись від -104дБм до 24дБм У діапазоні від -104дБм до -102дБм НШП 1220а, 1220b ввімкнено, перемикачі 1224а, 1224b вимкнено і АРП забезпечується демодулятором 1250 Від - 1 0 2 Д Б М ДО -84ДБМ АРП забезпечується 18 атенюатором 1216, а у межах від -84дБм до 62дБм НШП 1220а вимкнуто, перемикач 1224а ввімкнуто, НШП 1220b залишається ввімкнутим, а перемикач 1220b - вимкнутим, і АРП забезпечується атенюатором 1216 Нарешті, у діапазоні вище -46дБм атенюатор 1216 створює максимальне послаблення, рівень сигналу ПЧ на вході демодулятора 1250 зростає на 1дБ при зростанні на 1дБ вхідного сигналу РЧ і після АЦП 1410 АРП забезпечується демодулятором 1250 Фіг 8Б МІСТИТЬ схему, що ілюструє роботу типової схеми АРП у приймачі 1200 при зниженні потужності вхідного сигналу ПДКУ Як і раніше, підсилювач 1234 для спрощення має постійний коефіцієнт підсилення У межах від -24дБм до 46дБм НШП 1220а, 1220b вимкнуто, перемикачі 1224а, 1224b - ввімкнуто і АРП після ЦАП 1410 забезпечується демодулятором 1250 Від -46дБМ до -ббдБм АРП забезпечується атенюатором 1216, а у межах від -ббдБм до -69дБм атенюатор послаблює мінімально, а АРП забезпечується демодулятором 1250 При -70дБм НШП 1220b ввімкнуто, перемикач 1224b вимкнуто, від -70дБм до 84дБм АРП забезпечується атенюатором 1216, у межах від -84дБМ до -90дБм АРП забезпечується демодулятором 1250 При -91дБм НШП 1220а ввімкнуто, а перемикач 1220а - вимкнуто, і від -91дБм до -102дБм АРП забезпечується атенюатором 1216 У межах від -102дБм до -104дБм АРП забезпечується демодулятором 1250 На фіг 8А, 8Б наведено рівні сигналів РЧ, при яких НШП 1220а та 1220b вмикаються і вимикаються НШП 1220а вимикається, коли рівень вхідного сигналу перевищує -85дБм(фіг 8А) і не вмикається доки цей сигнал не впаде нижче -91дБм Гістерезис у 6дБ запобігає повторним переходам НШП між ввімкнутим і вимкнутим станами У НШП 1220b з цієї ж причани передбачено такий же гістерезис Винахід передбачає тікож ІНШІ значення гістерезису для оптимізацм роботи системи Цей опис стосується типового застосування АРП АРП може бути використане також з підсилювачами з змінними коефіцієнтами підсилення Розташування атенюатора 1216 і НШП 1220а, 1220Ь(фіг 2) є лише одним з можливих, призначеним задовольнити вимогам ПДКУ Винахід включає і ІНШІ застосування функції АРП з використанням описаних елементів, а також застосування, у яких ці елементи працюють у сполученні з іншими відомими елементами V Встановлення режимів приймача згідно з виміряною нелінійністю У першому втіленні винаходу ВТПЗ активних вузлів встановлюється залежно від виміряного рівня нелінійності приймача 1200 Рівень нелінійності можна оцінити через нахил ІСПС або вимірювання Ес/Іо Фіг 9 містить часову діаграму вимірювання нахилу ІСПС У типовому втіленні рівень вхідного сигналу РЧ змінюють, змінюючи послаблення атенюатором 1216 короткими імпульсами Нахил ІСПС виміряється для кожного імпульса і результати усереднюються на періоді Т для підвищення точності У момент кінця періоду Т вимір нахилу ІСПС порівнюється з порогом ІСПС і за результатом порівняння виконується коригування 19 положення ВТПЗ активних вузлів, як це було описано вище У момент ТО нахил ІСПС є нижчим за поріг ІСПС, що вказує нате, що приймач 1200 працює у межах ЛІНІЙНОСТІ і, отже, зміщення ВТПЗ НШП 1220b знижується, щоб знизити споживання енергії Подібним чином наприкінці періодів ТІ, Т2, ТЗ нахил ІСПС також є нижчим за поріг, і зміщення ВТПЗ НШП 1220b продовжує знижуватись У момент кінця ТО нахил ІСПС залишається нижчим за поріг і зменшується зміщення ВТПЗ міксера, оскільки зміщення ВТПЗ НШП 1220b вже досягло мінімального значення Наприкінці перюда Т5 нахил ІСПС перевищує поріг ІСПС, що вказує на неприпустимий рівень інтермодуляціиних сигналів і тому зміщення ВТПЗ міксера збільшується для поліпшення ЛІНІЙНОСТІ У типовому втіленні тривалість кожного імпульсу становить 200мкс, Т = 5мс і КІЛЬКІСТЬ імпульсів у одному періоді Т становить 9 При цих значеннях цикл вимірювань становить 36% і має бути досить малим, щоб погіршення Ес/Іо внаслідок періодичних відхилень амплітуди сигналу було мінімальним Тривалість імпульсів обрано короткою, щоб мінімізувати збурення для системи АРП Звичайно контур АРП діє повільно і не може стежити за короткочасними імпульсними змінами послаблення у атенюаторі Це особливо важливо, оскільки зміни амплітуди вихідного сигналу мають точно відповідати змінам амплітуд вхідного і інтермодуляціиних сигналів, а не змінам, викликаним схемою 1280 АРП Проте мала ширина імпульсів знижує точність вимірів потужності вихідного сигналу Для описаних функцій винахід передбачає використання різних тривалостей імпульсів і циклів вимірювання Амплітуду відхилень рівня вхідного сигналу РЧ обрано малою, щоб мінімізувати спотворення вихідного сигналу і вплив на положення ВТПЗ усього приймача У типовому втіленні крок зміни послаблення у атенюаторі для вимірювання нахилу ІСПС становить 0,5дБ Винахід включає також і ІНШІ значення таких кроків У типовому втіленні поріг ІСПС обрано рівним 1,2 Використання одного порогу ІСПС може призвести до частих змін робочої ВТПЗ для послідовних періодів Т Щоб запобігти цьому, передбачено два пороги ІСПС для створення гістерезису Зміщення ВТПЗ не зростає, доки виміряний нахил ІСПС не перевищить перший поріг ІСПС, і не знижується, доки виміряний нахил ІСПС не стане нижчим за другий поріг ІСПС Винахід передбачає використання як одного, так і багатьох порогів ІСПС Фіг 10А містить графік, що ілюструє керування зміщенням ВТПЗ у випадку зростання рівня потужності вхідного сигналу РЧ Вхідний сигнал містить сигнал ПДКУ і двотонні перешкоди, які перевищують сигнал ПДКУ на 58дБс Коли потужність сигналу ПДКУ лежить у межах від -104дБм до 101дБм, ВТПЗ міксера встановлюється на +10дБм, а ВТПЗ НШП 1220а і 1220b - на ОдБм З зростанням сигналу ПДКУ вище -101дБм нахил ІСПС перевищує поріг ІСПС зміщення ВТПЗ міксера 1230 зростає до +15дБ для зниження рівні нелі 49094 20 НІЙНОСТІ Атенюатор 1216 створює послаблення вхідного сигналу РЧ у межах від -104дБм до 84дБм При -84дБм відбувається шунтування НШП 1220а і атенюатор встановлюється на невелике послаблення При рівнях сигналу ПДКУ -83дБм, 79дБм, -75дБм і -71дБм зміщення ВТПЗ НШП 1220b зростає для придушення інтермодуляціиних сигналів При приблизно -64дБм відбувається шунтування НШП 1220Ь і атенюатор 1216 знову встановлюється у стан низького послаблення Фіг 10Б містить графік, що ілюструє керування зміщенням ВТПЗ у випадку зниження рівня потужності вхідного сигналу РЧ Вхідний сигнал містить сигнал ПДКУ і двотонні перешкоди, які перевищують сигнал ПДКУ на 58дБс Спочатку, коли потужність сигналу ПДКУ становить -бОдБм, відбувається шунтування НШП 1220а і 1220b 3 зниженням потужності сигналу ПДКУ до -70дБм для забезпечення необхідного підсилення вмикається НШП 1220b При приблизно -76дБм, -80дБм, -84дБм і 88дБм зміщення ВТПЗ НШП 1220b знижується для зменшення споживання енергії При -90дБм атенюатор досягає верхньої межі послаблення і вмикається НШП 1220а При -ЮОдБм зміщення ВТПЗ міксера 1230 зменшується для зниження витрат енергії, оскільки рівень вхідного сигналу РЧ малий Як уже відзначалось, рівень потужності РЧ сигналу, при якому відбувається коригування положення ВТПЗ міксера 1230 і НШП 1220а, 1220b, визначається вимірюванням нахилу ІСПС Виміри нахилу ІСПС можуть не відповідати ЛІНІЙНО рознесеним точкам зміни зміщення ВТПЗ, як це зображено на фіг 10А, 10Б До того ж замість дискретних змін може бути застосоване безперервне керування зміщенням VI Встановлення робочого режиму приймача У другому втіленні винаходу ВТПЗ активних вузлів встановлюються згідно з робочим режимом приймача Як уже відзначалось, приймач 1300(фіг 3) може бути встановлений у стільниковому телефоні, який має працювати у смузі ПСЗ абу у СТІЛЬНИКОВІЙ смузі У кожній з смуг може проходити цифровий або аналоговий сигнал з використанням різних робочих режимів Застосування різних режимів поліпшує якість роботи і зберігає енергію елементів живлення Наприклад, робочими режимами стільникового телефону можуть бути (1) пейджерування у щілинному режимі для довших періодів готовності, (2) покрокове підсилення для поліпшення динамічного діапазону, (3) розріджений вихід передавача для тривалих розмов, (4) обрання частотних смуг для двосмугових телефонів(ПСЗ та стільникова), (5) переведення паралельного доступу між системами(ПДКУ, УМТО, ГСМ тощо) і (6) засоби керування зміщенням у схемах у присутності першкод Робочі режими стільникового телефону визначаються різними функціональними вимогами У типовому втіленні кожному з робочих режимів призначається унікальний ідентифікатор з N бітами режиму Біти режиму визначають окремі характеристики робочого режиму Наприклад, один біт режиму може визначати вибір між смугою ПСЗ і стільниковою, інший біт - вибір між цифровим(ПДКУ) і аналоговим(ЧМ) режимами N біти 49094 21 режиму надходять до логічної схеми у контролері 1370, яка декодує їх для шини керування, яка може нести до 2N керуючих бітів Шина керування проходить через схеми приймача 1300, які мають бути керованими Наприклад, шина керування може (1) встановлювати положення ВТПЗ міксера у процесорі 1348 РЧ/ПЧ і НШП у процесорах 1310а, 1310b РЧ, (2) встановлювати підсилення приймача 1300, (3) встановлювати напруги і/або струми зміщення постійним струмом для інших схем РЧ та ПЧ у приймачі 1300, (4) обирати бажану смугу сигналу і (5) встановлювати частоту генераторів Типове втілення керування положенням ВТПЗ у приймачі 1300, засноване на робочому режимі, ілюстровано у таб 1 та 2 Приймач 1300 може бути двосмуговим(ПСЗ і стільникова) і дворежимним(ПДКУ і ЧМ) У типовому втіленні у смузі ПСз можуть проходити лише передачі ПДКУ, а у СТІЛЬНИКОВІЙ смузі - як передачі ПДКУ, так і ЧМ(ЧМ передачі можуть надходити від системи УМТО) і тому у цьому випадку використано чотири біти ре 22 жиму Цими бітами є біти BAND_SELECT, IDLE/, FM/ і LNA_RANGE Біт BAND_SELECT визначає робочу смугу(1 - ПСЗ, 0 - стільникова) Біт IDLE/ встановлює приймач 1300 у режим спокою(0 - спокій), тобто роботу з нижчими зміщеннями ВТПЗ Біт FM/(0 - ЧМ) інструктує приймач обробляти ЧМ сигнал Біт LNA_RANGE(1 - шунтування) визначає підсилення приймача 1300 Якщо біт LNA_RANGE має значення 1, це визначає режим шунтування, тобто напруги Vbiasi, Vbias2 для НШП 1320а або 1321 а встановлюються низькими і вони вимикаються Коли значення біту LNA_RANGE 0(стільникова смуга), приймач 1300 працює у одному з стільникових режимів, наведених у таб 1 У таб 1 наведено лише робочі ВТПЗ для НШП 1320а і 1320b Подібну таблицю можна побудувати для робочої ВТПЗ активного міксера процесора 1348 РЧ/ПЧ У цьому режимі постійний струм зміщення НШП 1321а і 1321b вимикається для збереження енергії живлення Таблиця 1 Керування приймачем у стільниковому робочому режимі DLE/ FM/ LNA RANGE 0 0 0 0 1 1 1 1 0 0 1 1 0 0 1 1 0 1 0 1 0 1 0 1 НШП 1320а Vbiasi 0 0 1 0 0 0 1 0 НШП 1320а Vbias2 1 0 0 0 1 0 1 0 Коли BAND_SELECT встановлено у 1 (смуга ПСЗ), телефон працює у одному з робочих режимів ПСЗ(таб 2) У цих режимах струми зміщення НШП 1320b Vbiasi 1 1 1 1 1 1 1 1 НШП 1320b Vbias2 0 0 1 1 0 0 1 1 Робочий режим Прийом ЧМ Прийом ЧМ ПДКУ щілинний ПДКУ щілинний Прийом/передача Прийом/передача Прийом/передача Прийом/передача ЧМ ЧМ ПДКУ ПДКУ НШП 1320а, 1320b вимкнено для збереження енергії живлення 23 49094 24 Таблиця 2 Керування приймачем у робочих режимах ПСЗ IDLE/ FM/ LNA RANGE 0 0 0 0 1 1 1 1 0 0 1 1 0 0 1 1 0 1 0 1 0 1 0 1 НШП 1320а Vbiasl 0 0 1 0 0 0 1 0 НШП 1320а Vbias2 1 0 0 0 1 0 1 0 НШП 1320b Vbiasl 1 1 1 1 1 1 1 1 Утаб 1, 2 наведено робочі ВТПЗ НШП, які забезпечують мінімальне споживання енергії і бажане функціонування Для інших схем, що потребують керування, також можуть бути побудовані подібні таблиці Наприклад, можна побудувати таблицю, яка визначатиме належні діапазони АРП в залежності від очікуваного рівня вхідного сигналу у бажаному робочому режимі Інші таблиці можуть встановлювати напруги зміщуючого струму або струму, якого потребують схеми приймача 1200 VII Регулювання приймача згідно з рівнем прийнятого сигналу У третьому втіленні винаходу ВТПЗ активних вузлів встановлюється згідно з виміряною амплітудою сигналу на різних стадіях його обробки у приймачі До виходів обраних компонентів можуть бути приєднані вимірювачі потужності сигналу(фіг 2) У першому втіленні цього варіанту регулювання приймача вимірювачі потужності можуть бути приєднані до виходів НШП 1220а, 1220b і міксера 1230 для вимірювання потужності їх вихідних сигналів ПЧ Результати вимірювання надходять до схеми 1280 керування зміщенням, який, використовуючи цю інформацію, НШП 1320b Vbias2 0 0 1 1 0 0 1 1 Робочий режим не використовується не використовується ПСЗ щілинний ПСЗ щілинний не використовується не використовується Прийом/передача ПСЗ Прийом/передача ПСЗ коригує ВТПЗ тих компонентів, що працюють поза зумовленим рівнем нелінійності У другому втіленні цього варіанту регулювання вимірювачі потужності можуть бути приєднані до виходів міксера 1230 і демодулятора 1250 для вимірювання потужності вихідних сигналів ПЧ і основної частоти Результати вимірювання також надходять до схеми 1280 керування зміщенням Різниця між вимірами потужності репрезентує потужність позасмугових сигналів і може бути використана для встановлення бажаного зміщення ВТПЗ Схема 1280 керування зміщенням коригує робочі точки компонентів, як це описано вище, для підтримання бажаної якості роботи Виїмірювач потужності може бути будь-якого відомого типу, наприклад, дюдним детектором з фільтром нижніх частот Наведений опис бажаних втілень дозволить фахівцю застосувати винахід, зробивши, якщо це необхідно, бажані зміни у наведених втіленнях згідно з принципами винаходу Винахід не обмежується наведеними втіленнями і має більш широке поле застосування, визначене його основними концепціями і новими ознаками 25 49094 26 27 49094 28 29 49094 Mr. ЗО 31 49094 32 33 49094 34 35 49094 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 36
ДивитисяДодаткова інформація
Назва патенту англійськоюProgrammed receiver with the linear characteristic and a method of adjusting the receiver for operation within the linear area
Назва патенту російськоюНастраиваемый приемник с линейной характеристикой и способ настройки приемника для работы в зоне линейности
МПК / Мітки
Мітки: лінійності, програмованої, приймачі, спосіб, приймач, забезпечення, програмований, лінійний
Код посилання
<a href="https://ua.patents.su/18-49094-programovanijj-linijjnijj-prijjmach-ta-sposib-zabezpechennya-u-prijjmachi-programovano-linijjnosti.html" target="_blank" rel="follow" title="База патентів України">Програмований лінійний приймач та спосіб забезпечення у приймачі програмованої лінійності</a>
Спосіб вимірювання лінійності підсилення підсилювача
Номер патенту: 9424
Опубліковано: 30.09.1996
Автори: Бережний Василь Олексійович, Очковський Ігор Іванович
МПК: G01R 27/28
Мітки: лінійності, підсилювача, спосіб, підсилення, вимірювання
Формула / Реферат:
Способ определения линейности усиления усилителя, заключающийся в подаче сигнала на вход измеряемого усилителя и измерении мощности сигнала на его выходе, отличающийся тем, что, с целью расширения области использования способа за счет измерения линейности усиления широкополосных усилителей с большим коэффициентом усиления в процессе измерения шумовой температуры последних, на вход измеряемого усилителя подают шумовой сигнал от эталонного...
Приймач амплітудно-модульованих сигналів
Номер патенту: 13406
Опубліковано: 16.12.1996
Автори: Останін Анатолій Григорович, Бардила Тадей-Володимир Ілліч
Мітки: амплітудно-модульованих, приймач, сигналів
Формула / Реферат:
Приймач амплітудпо-модульованих сигналів, що містить, селективне вхідне коло, двох-входовий нелінійний змішувач, перший вхід якого з'єднаний з виходом селективного вхідного кола, а другий з гетеродином, та фільтр низької частоти, який відрізняється тим, що в нього введені поглиблювач модуляції, синхронний детектор, а фазовий коректор, причому вхід поглиблювача модуляції з'єднаний виходом нелінійного змішувача, а вихід з входом синхронного...
Програмований багатоканальний таймер
Номер патенту: 40140
Опубліковано: 16.07.2001
Автор: Пико Георгій Анатолійович
МПК: H03K 5/13
Мітки: багатоканальний, таймер, програмований
Формула / Реферат:
Програмований багатоканальний таймер, що містить першу дискретну лінію затримки, N+3 логічних елементів І, запам'ятовуючий пристрій, лічильник керування, N тригерів, логічний елемент АБО, перший вхід якого підключений до вхідної шини імпульсу запуску, другий вхід до виходу (N+3)-го логічного елемента І, а вихід - до входу початкового установлення першої дискретної лінії затримки та лічильного входу лічильника керування, вхід установлення у...
Лінійний блок системи телемеханіки

Номер патенту: 36968
Опубліковано: 16.09.2002
Автор: ПОРТНОВ ЄВГЕН МИХАЙЛОВИЧ
МПК: G08C 15/00, G08C 19/28
Мітки: системі, лінійний, блок, телемеханіки
Формула / Реферат:
Лінійний блок системи телемеханіки, що містить перший блок живлення, у якого перший (позитивний) та другий виходи з'єднані, відповідно, з першими та другими входами першого та другого елементів гальванічного розділення сигналів, причому перший вихід з’єднаний з першим входом першого формувача сигналів, у якого другий вхід з'єднаний з виходом першого елемента гальванічного розділення сигналів, з'єднаного третім входом з виходом передавача, та...
Анізотропний термоелектричний приймач випромінювання
Номер патенту: 41572
Опубліковано: 17.09.2001
Автори: Гуцул Іван Васильович, Раренко Анна Іларієвна, Ащеулов Анатолій Анатолійович
МПК: H01L 35/02
Мітки: термоелектричний, анізотропний, випромінювання, приймач
Формула / Реферат:
Анізотропний термоелектричний приймач випромінювання, що складається з термостата і чотиригранної прямокутної призми з оптично прозорого термоелектричнj анізотропного матеріалу, на поверхні якого розміщені оптично просвітлюючі шари, при цьому кристалографічні осі призми з максимальним і мінімальним коефіцієнтами термоЕРС розміщені в площині бокової грані призми а вісь із максимальною термоЕРС орієнтована під кутом
Попередній патент: Пристрій для формування імпульсів рахування предметів, що рухаються
Наступний патент: Спосіб компенсації амплітудно-фазових викривлень у системі керування обертової ракети
Випадковий патент: Спосіб прискорення регенерації тканин під час реплантації ретинованих зубів