Спосіб компенсації амплітудно-фазових викривлень у системі керування обертової ракети
Номер патенту: 49095
Опубліковано: 16.09.2002
Автори: Косовенко Євген Вікторович, Коростельов Олег Петрович, Кузьмін В'ячеслав Павлович, Семенов Леонід Антонович, Доценко Борис Іванович
Формула / Реферат
Спосіб компенсації амплітудно-фазових викривлень у системі керування обертової ракети, заснований на вимірі динамічних викривлень, внесених елементами системи керування в модульований за допомогою синусно-косинусного перетворювача і гіроскопічного датчика кута крену управляючий сигнал, подачі на вхід слідкуючого приводу скоригованого сигналу, який відрізняється тим, що для компенсації амплітудних і фазових викривлень вхідний сигнал на привід формують шляхом корекції сигналу по амплітуді і фазі в залежності від частоти обертання ракети, яка оцінюється через вимірювання періоду проходження синхроімпульсів із датчика кута крену.
Текст
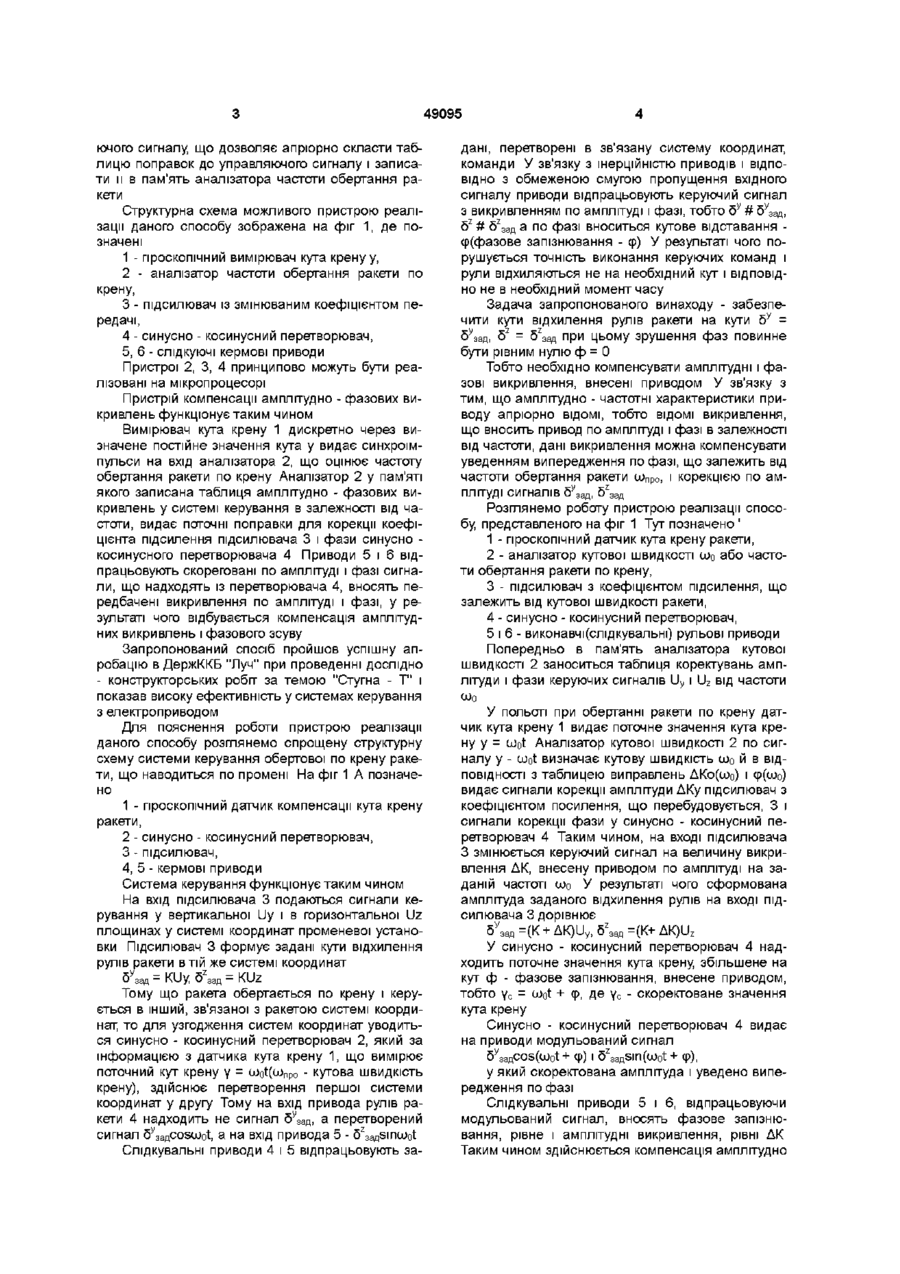
Спосіб компенсації амплітудно-фазових викривлень у системі керування обертової ракети, Винахід відноситься до ракетної техніки , зокрема до систем керування ракет і може бути використаний в одно - і двоканальних системах керування при наведенні обертових відносно поздовжньої осі ракет Широко відомий спосіб забезпечення СТІЙКОСТІ систем керування ракет заснований на достатньо широкій смузі пропуску слідкуючих виконавчих рульових приводів із використанням зворотних зв'язків І коригувальних ланок[1] Такі приводи вносять допустимі фазові зсуви й амплітудні викривлення в систему керування ракети Недоліком даного способу є високі технічні вимоги до швидкодії і питомої потужності приводу, що підвищує його вартість, збільшує габаритно - масові характеристики Відомий спосіб забезпечення СТІЙКОСТІ систем керування обертових ракет заснований на коригуванні фази в управляючому сигналі шляхом установки гіроскопа крену на кут випередження[2] Недоліком даного способу є ПОСТІЙНІСТЬ фазового зсуву незалежно від частоти обертання снаряда, що, у свою чергу, залежить від параметрів його руху Крім того, не враховуються й амплітудні викривлення, внесені елементами системи керування За прототип обрано спосіб, заснований на ви ВИКРИВЛЕНЬ У СИСТЕМІ КЕРУВАННЯ ОБЕРТО заснований на вимірі динамічних викривлень, внесених елементами системи керування в модульований за допомогою синусно-косинусного перетворювача і гіроскопічного датчика кута крену управляючий сигнал, подачі на вхід слідкуючого приводу скоригованого сигналу, який відрізняється тим, що для компенсації амплітудних і фазових викривлень вхідний сигнал на привід формують шляхом корекції сигналу по амплітуді і фазі в залежності від частоти обертання ракети, яка оцінюється через вимірювання періоду проходження синхроімпульсів із датчика кута крену мірі різниці фаз між модульованим частотою обертання ракети управляючим сигналом, що надходить на привід, і сигналом, відпрацьованим приводом Вимірювач фази виконаний на просторовому фазообертачі, що складається з чотирьох блоків, ВІДПОВІДНО з'єднаних між собою, і достатньо складної схеми керування(СК) [3] Недоліком цього способу є неможливість компенсації амплітудних і фазових викривлень, внесених всіма елементами СК, тому що вимірюється тільки фазові зсуви, обумовлені роботою приводу, і складність технічної реалізації просторового вимірювача фазового зсуву Ціллю даного способу є розширення функціональних можливостей способу шляхом забезпечення компенсації не тільки фазових, але й амплітудних викривлень, внесених всіма елементами СК, і спрощення технічної реалізації алгоритмів системи керування Суть запропонованого способу полягає в корекції амплітуди і фази модульованого управляючого сигналу в залежності від частоти обертання ракети по крену, оцінюваної по періоду проходження синхроімпульсів із гіроскопічного датчика кута крену Динамічні ланки системи керування з відомими амплітудно - фазовими характеристиками, у залежності від частоти вносять визначені амплітудно - фазові викривлення управля О ю о> о 49095 ючого сигналу, що дозволяє апріорно скласти таблицю поправок до управляючого сигналу і записати и в пам'ять аналізатора частоти обертання ракети Структурна схема можливого пристрою реалізації даного способу зображена на фіг 1, де позначені 1 - гіроскопічний вимірювач кута крену у, 2 - аналізатор частоти обертання ракети по крену, 3 - підсилювач із змінюваним коефіцієнтом передачі, 4 - синусно - косинусний перетворювач, 5, 6 - слідкуючі кермові приводи Пристрої 2, 3, 4 принципово можуть бути реалізовані на мікропроцесорі Пристрій компенсації амплітудно - фазових викривлень функціонує таким чином Вимірювач кута крену 1 дискретно через визначене постійне значення кута у видає синхроімпульси на вхід аналізатора 2, що оцінює частоту обертання ракети по крену Аналізатор 2 у пам'яті якого записана таблиця амплітудно - фазових викривлень у системі керування в залежності від частоти, видає поточні поправки для корекції коефіцієнта підсилення підсилювача 3 і фази синусно косинусного перетворювача 4 Приводи 5 і 6 відпрацьовують скореговані по амплітуді і фазі сигнали, що надходять із перетворювача 4, вносять передбачені викривлення по амплітуді і фазі, у результаті чого відбувається компенсація амплітудних викривлень і фазового зсуву Запропонований спосіб пройшов успішну апробацію в ДержККБ "Луч" при проведенні дослідно - конструкторських робіт за темою "Стугна - Т" і показав високу ефективність у системах керування з електроприводом Для пояснення роботи пристрою реалізації даного способу розглянемо спрощену структурну схему системи керування обертової по крену ракети, що наводиться по промені На фіг 1 А позначено 1 - гіроскопічний датчик компенсації кута крену ракети, 2 - синусно - косинусний перетворювач, 3 - підсилювач, 4, 5 - кермові приводи Система керування функціонує таким чином На вхід підсилювача 3 подаються сигнали керування у вертикальної Uy і в горизонтальної Uz площинах у системі координат променевої установки Підсилювач 3 формує задані кути відхилення рулів ракети в тій же системі координат 5 у з а д = KUy 5 z 3 a f l = KUz Тому що ракета обертається по крену і керується в інший, зв'язаної з ракетою системі координат, то для узгодження систем координат уводиться синусно - косинусний перетворювач 2, який за інформацією з датчика кута крену 1, що вимірює поточний кут крену у - wot(wnpo - кутова швидкість крену), здійснює перетворення першої системи координат у другу Тому на вхід привода рулів ракети 4 надходить не сигнал 5 у з а д , а перетворений сигнал 5y3aflcoswot, а на вхід привода 5 - 5z3aflsmwot Слідкувальні приводи 4 і 5 відпрацьовують за дані, перетворені в звязану систему координат, команди У зв'язку з шерційністю приводів і ВІДПОВІДНО з обмеженою смугою пропущення вхідного сигналу приводи відпрацьовують керуючий сигнал з викривленням по амплітуді і фазі, тобто 5 у # 5 у з а д , 5Z # 5 z 3 a f l а по фазі вноситься кутове відставання ср(фазове запізнювання - ер) У результаті чого порушується точність виконання керуючих команд і рули відхиляються не на необхідний кут і ВІДПОВІДНО не в необхідний момент часу Задача запропонованого винаходу - забезпечити кути відхилення рулів ракети на кути 5 у = у 5 зад, 5Z = 5 z 3 a f l при цьому зрушення фаз повинне бути рівним нулю ф = 0 Тобто необхідно компенсувати амплітудні і фазові викривлення, внесені приводом У зв'язку з тим, що амплітудно - частотні характеристики приводу апріорно ВІДОМІ, тобто ВІДОМІ викривлення, що вносить привод по амплітуді і фазі в залежності від частоти, дані викривлення можна компенсувати уведенням випередження по фазі, що залежить від частоти обертання ракети w npo , і корекцією по амплітуді сигналів 5 у з а д , 5 z 3 a f l Розглянемо роботу пристрою реалізації способу, представленого на фіг 1 Тут позначено ' 1 - гіроскопічний датчик кута крену ракети, 2 - аналізатор кутової швидкості wo або частоти обертання ракети по крену, 3 - підсилювач з коефіцієнтом підсилення, що залежить від кутової швидкості ракети, 4 - синусно - косинусний перетворювач, 5 і 6 - виконавчі(слідкувальні) рульові приводи Попередньо в пам'ять аналізатора кутової швидкості 2 заноситься таблиця коректувань амплітуди і фази керуючих сигналів Uy і Uz від частоти У польоті при обертанні ракети по крену датчик кута крену 1 видає поточне значення кута крену у = wot Аналізатор кутової швидкості 2 по сигналу у - wot визначає кутову швидкість wo й в ВІДПОВІДНОСТІ з таблицею виправлень UKo(wo) і cp(wo) видає сигнали корекції амплітуди ДКу підсилювач з коефіцієнтом посилення, що перебудовується, 3 і сигнали корекції фази у синусно - косинусний перетворювач 4 Таким чином, на вході підсилювача З змінюється керуючий сигнал на величину викривлення ДК, внесену приводом по амплітуді на заданій частоті wo У результаті чого сформована амплітуда заданого відхилення рулів на вході підсилювача 3 дорівнює 5 У з а д =(К + ДК)ІІ У , 5 z 3 a f l =(K+ AK)UZ У синусно - косинусний перетворювач 4 надходить поточне значення кута крену, збільшене на кут ф - фазове запізнювання, внесене приводом, тобто ус - wot + ер, де ус - скоректоване значення кута крену Синусно - косинусний перетворювач 4 видає на приводи модульований сигнал 5 y 3afl cos(w 0 t + ер) і 5 z 3afl sm(w o t + ер), у який скоректована амплітуда і уведено випередження по фазі Слідкувальні приводи 5 і 6, відпрацьовуючи модульований сигнал, вносять фазове запізнювання, рівне і амплітудні викривлення, рівні ДК Таким чином здійснюється компенсація амплітудно 49095 - фазових викривлень У результаті рули відхиляються на кути 5 у = Kllycoswot, 5 z 3 a f l = KUzsinwot ВІДПОВІДНО до закону керування без викривлень по амплітуді і фазі Література 1 Патент Російської Федерації №213876, F 42 В 15/01, G 05 В 11/06 2 Техника и оружие, М , 1996, №4, С 5 3 В Дудка, Ю Парфенов Самонастраивающийся двухканальный автопилот для ЗУР, Авиапанорама, М, 1999, ноябрь - декабрь, С 33-34 Фіг І ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044)456-20 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for compensating amplitude and phase distortion in a control system of a spinning rocket
Автори англійськоюSemenov Leonid Antonovych, Dotsenko Borys Ivanovych, Kuzmin Viacheslav Pavlovych, Kosovenko Yevhen Viktorovych, Korosteliov Oleh Petrovych
Назва патенту російськоюСпособ компенсации амплитудных и фазовых искажений в системе управления ракеты, вращающейся вокруг продольной оси
Автори російськоюСеменов Леонид Антонович, Доценко Борис Иванович, Кузьмин Вячеслав Павлович, Косовенко Евгений Викторович, Коростелев Олег Петрович
МПК / Мітки
МПК: F42B 15/01, G05B 11/01
Мітки: спосіб, амплітудно-фазових, обертової, системі, викривлень, ракети, компенсації, керування
Код посилання
<a href="https://ua.patents.su/3-49095-sposib-kompensaci-amplitudno-fazovikh-vikrivlen-u-sistemi-keruvannya-obertovo-raketi.html" target="_blank" rel="follow" title="База патентів України">Спосіб компенсації амплітудно-фазових викривлень у системі керування обертової ракети</a>
Пристрій для лікування викривлень хребта
Номер патенту: 32831
Опубліковано: 15.02.2001
Автор: Бутенко Леонід Леонідович
МПК: A61B 17/60
Мітки: лікування, викривлень, хребта, пристрій
Формула / Реферат:
Пристрій для лікування викривлень хребта, що містить у собі два перехрещених стержня, з’єднаних між собою, з можливістю зворотно-поступового руху, відрізняється тим, що пристрій обладнано на двох кінцях поздовжнього і одному кінці поперечного стержнів штангами, які кріпляться до стержнів шарнірами, а на штангах знаходяться кільця захоплювання.
Спосіб модуляції при вимірюванні фазових характеристик
Номер патенту: 38298
Опубліковано: 15.05.2001
Автор: Огороднійчук Леонід Дмитрович
МПК: G01R 27/28
Мітки: характеристик, спосіб, модуляції, фазових, вимірюванні
Формула / Реферат:
(21) 2000063579(54) (57) Дата прийняття рішення 28 березня 2001р. 1. Спосіб модуляції при вимірюванні фазових характеристик, у відповідності з яким сигнал (сигнали) розгалужують і здійснюють модуляцію, який відрізняється тим,...
Аналізатор спектра вібрації обертової машини

Номер патенту: 41658
Опубліковано: 17.09.2001
Автор: Шевченко Сергій Анатолійович
МПК: G01M 7/00
Мітки: машини, спектра, аналізатор, вібрації, обертової
Формула / Реферат:
Аналізатор спектра вібрації обертової машини, який містить віброперетворювач, блок керування, послідовно з'єднані підсилювач, перший фільтр нижніх частот, аналого-цифровий перетворювач, обчислювач і реєстратор, а також послідовно з'єднані датчик частоти обертання, формувач імпульсів і помножувач частоти, вихід якого з'єднаний з другим входом аналого-цифрового перетворювача і входом блока керування, перший вихід якого з'єднаний з другим входом...
Спосіб підсилення амплітудно-модульованих та фазоманіпульованих сигналів та пристрій для його здійснення
Номер патенту: 30592
Опубліковано: 15.01.2002
Автор: СИНЕЛЬНИК ОЛЕКСАНДР ІВАНОВИЧ
Мітки: фазоманіпульованих, пристрій, підсилення, спосіб, сигналів, здійснення, амплітудно-модульованих
Формула / Реферат:
1. Спосіб підсилення амплітудно-модульованих та фазоманіпульованих сигналів, здійснюваний в електричному колі, яке містить керований двополюсник повного імпедансу, залежність між вхідним діянням та вихідним сигналом близька до залежності між напругою та струмом у вказаному двополюснику, залежністю між напругою та струмом керують за допомогою сигналу керування, який містить частоту, що дорівнює подвійній несучій сигналу, фаза несучої сигналу...
Спосіб підсилення амплітудно-модульованих та фазо-маніпульованих сигналів та пристрій для його здійснення
Номер патенту: 30592
Опубліковано: 15.12.2000
Автор: СИНЕЛЬНИК ОЛЕКСАНДР ІВАНОВИЧ
Мітки: спосіб, амплітудно-модульованих, сигналів, пристрій, підсилення, фазо-маніпульованих, здійснення
Формула / Реферат:
1. Спосіб підсилення амплітудно-модульованих та фазоманіпульованих сигналів, здійснюваний в електричному колі, яке містить керований двополюсник повного імпедансу, залежність між вхідним діянням та вихідним сигналом близька до залежності між напругою та струмом у вказаному двополюснику, залежністю між напругою та струмом керують за допомогою сигналу керування, який містить частоту, що дорівнює подвійній несучій сигналу, фаза несучої сигналу...
Попередній патент: Програмований лінійний приймач та спосіб забезпечення у приймачі програмованої лінійності
Наступний патент: Водогрійний котел
Випадковий патент: Снаряд нарізний з лопатями та накопичувальними камерами