Система розподілу маси для насіннєвих сівалок і машин для внесення продуктів







Формула / Реферат
1. Сільськогосподарське знаряддя, яке містить: дишло, що має перший кінець, який містить зчеп, і протилежний другий кінець;
центральний брус для навішування робочих органів на другому кінці дишла, при цьому центральний брус для навішування робочих органів містить центральні колеса, що продовжуються від нього;
перше крило і друге крило, які продовжуються від протилежних сторін центрального бруса для навішування робочих органів, причому кожне з першого крила і другого крил містить колеса крил, які продовжуються від них; і
систему розподілу маси, функціонально з'єднану з центральним брусом для навішування робочих органів, першим крилом і другим крилом, при цьому система розподілу маси містить множину датчиків і виконана з можливістю регулювання притискного зусилля на перше крило і друге крило щонайменше частково на основі відносних навантажень, які діють на центральні колеса і колеса крил.
2. Сільськогосподарське знаряддя за п. 1, в якому множина датчиків функціонально з'єднана з множиною циліндрів так, що система розподілу маси автоматично регулює множину циліндрів на основі множини датчиків для перерозподілу навантаження на центральних колесах і колесах крил.
3. Сільськогосподарське знаряддя за п. 2, що додатково містить інтелектуальний пристрій керування, функціонально з'єднаний з системою розподілу маси, виконаний з можливістю визначення твердості землі для регулювання множини циліндрів.
4. Сільськогосподарське знаряддя за п. 3, в якому множина датчиків розташована на центральних колесах і колесах крил.
5. Сільськогосподарське знаряддя за п. 4, в якому множина датчиків включає датчики тиску.
6. Сільськогосподарське знаряддя за п. 4, в якому множина датчиків включає датчики навантаження.
7. Сільськогосподарське знаряддя за п. 4, в якому система розподілу маси додатково включає датчик рівня.
8. Сільськогосподарське знаряддя за п. 4, в якому система розподілу маси
додатково включає обчислення зменшення маси на крилах на основі датчика витрати.
9. Сільськогосподарське знаряддя за п. 8, в якому розраховуване на основі датчика витрати зменшення маси включає масу матеріалів насіння, добрив або інсектицидів у висівній секції, для визначення розподіленої маси в реальному часі відносно обчислення притискного зусилля.
10. Сільськогосподарське знаряддя за п. 1, яке додатково містить множину бункерів, розташованих на центральному брусі для навішування робочих органів або першому і другому крилах.
11. Сільськогосподарське знаряддя за п. 1, в якому системою розподілу маси є система із зворотним зв'язком, в якій притискне зусилля регулюється автоматично.
12. Сільськогосподарське знаряддя за п. 1, в якому системою розподілу маси є система без зворотного зв'язку, в якій притискне зусилля регулюється вручну.
13. Система розподілу маси для знаряддя з множиною висівних секцій, розташованих на центральній рамі, лівому крилі і правому крилі, яка містить:
інтелектуальний пристрій керування;
множину датчиків, пов'язаних з множиною висівних секцій і з'єднаних з інтелектуальним пристроєм керування; і
множину циліндрів, функціонально з'єднаних з інтелектуальним пристроєм керування і лівим і правим крилами;
при цьому інтелектуальний пристрій керування виконаний з можливістю використання інформації від датчиків для регулювання множини циліндрів таким чином, що крила одержують притискне зусилля на основі інформації, одержаної від одного або більше з множини датчиків.
14. Система розподілу маси за п. 13, яка є системою із зворотним зв'язком, яка автоматично регулює притискне зусилля.
15. Система розподілу маси за п. 13, яка є системою без зворотного зв'язку, в якій притискне зусилля регулюється вручну.
16. Система розподілу маси за п. 13, в якій один або більше з множини датчиків включають датчики зусилля, датчики навантаження, датчики тиску, датчики маси, датчики рівня, датчики притискного зусилля, акселерометри або датчики рідини.
17. Система розподілу маси за п. 13, яка додатково містить користувацький інтерфейс, який електрично з'єднаний з інтелектуальним пристроєм керування для відображення зворотного зв'язку системи і/або забезпечує можливість введення змін у систему.
18. Спосіб розподілу маси навколо центральної рами, лівого крила і правого крила сільськогосподарського знаряддя, який включає:
визначення однієї або більше характеристик, пов'язаних з центральною рамою, лівим крилом і правим крилом знаряддя, за допомогою одного або більше датчиків; і
використання інтелектуального пристрою керування для приведення в дію одного або більше циліндрів знаряддя для незалежного регулювання притискного зусилля на лівому крилі, правому крилі або на обох лівому крилі і правому крилі, на основі однієї або більше характеристик, визначених за допомогою одного або більше датчиків.
19. Спосіб за п. 18, який додатково включає повторення етапів у замкнутому контурі для постійного регулювання притискного зусилля на одному або обох крилах.
20. Спосіб за п. 18, який додатково включає відображення інформації від одного або більше датчиків і одного або більше циліндрів на користувацький інтерфейс для забезпечення ручного або автоматичного регулювання притискного зусилля.
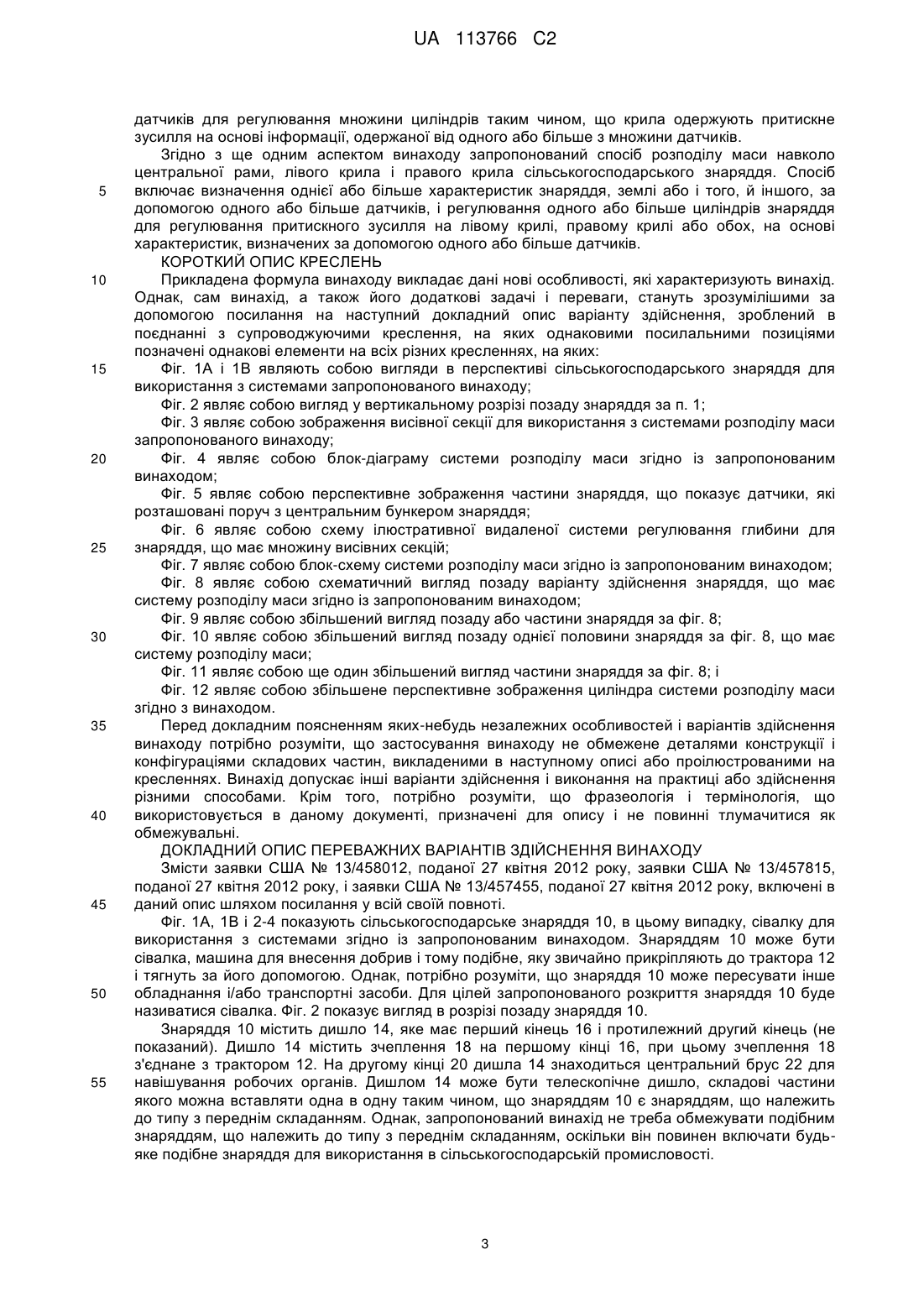
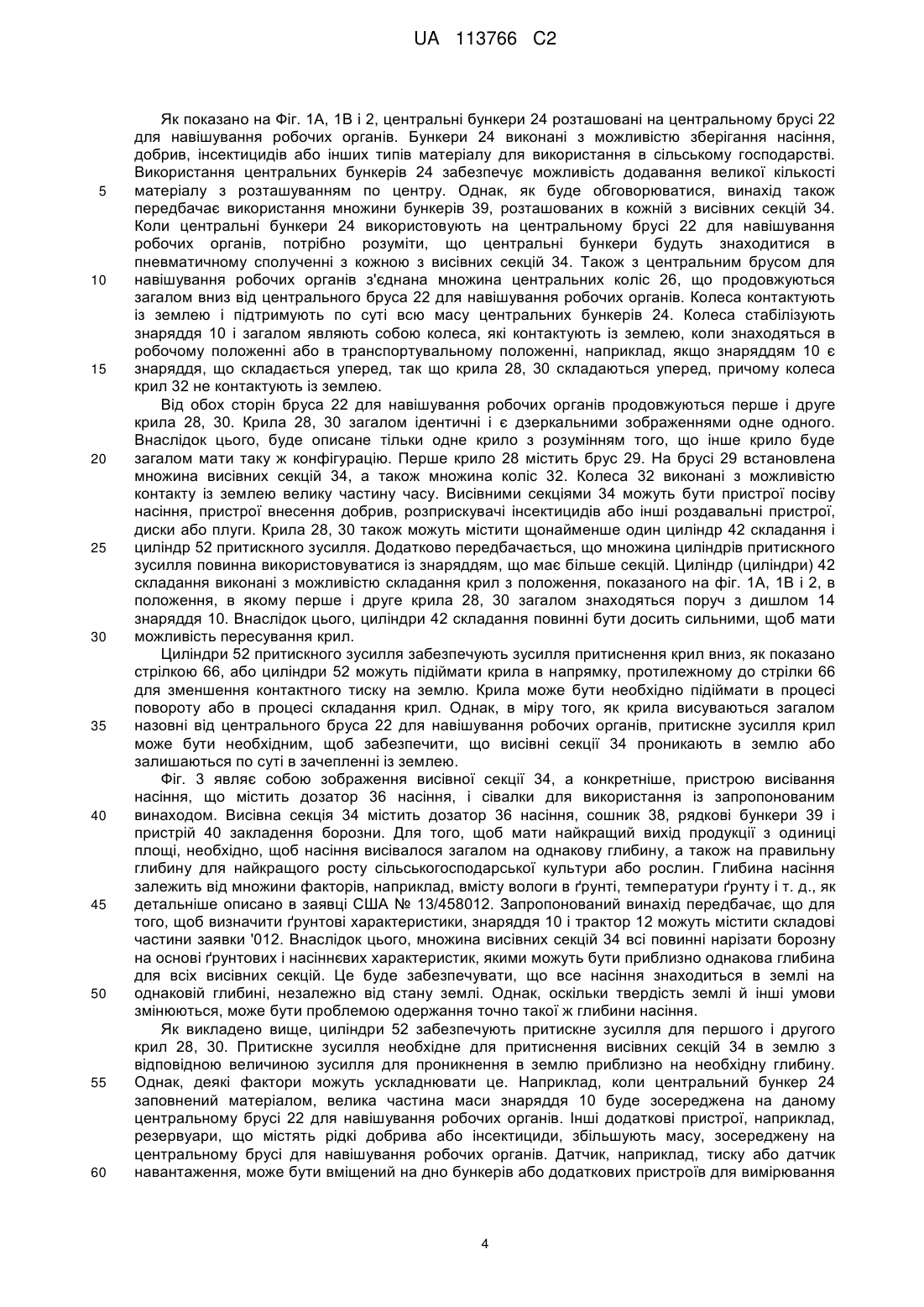
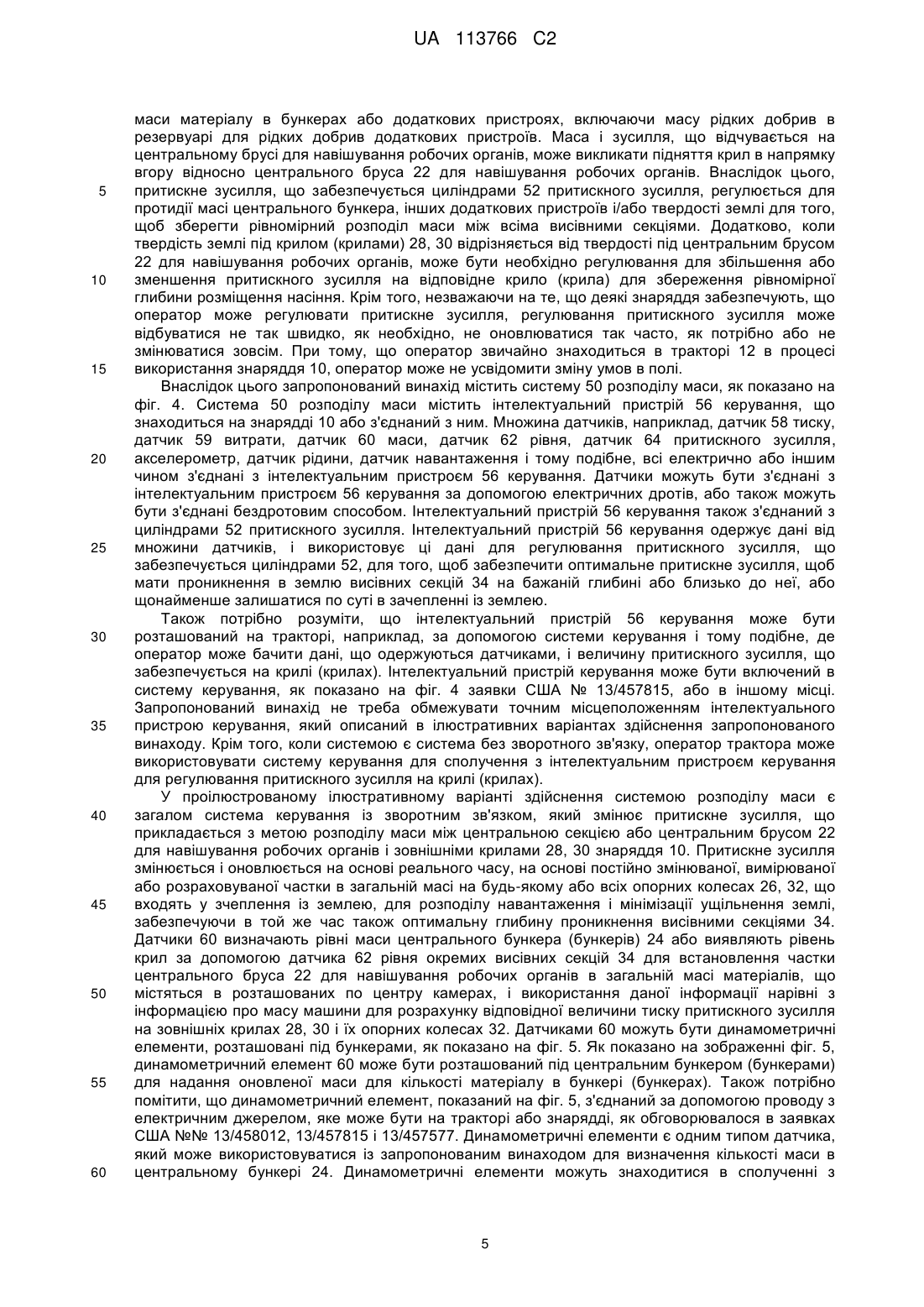
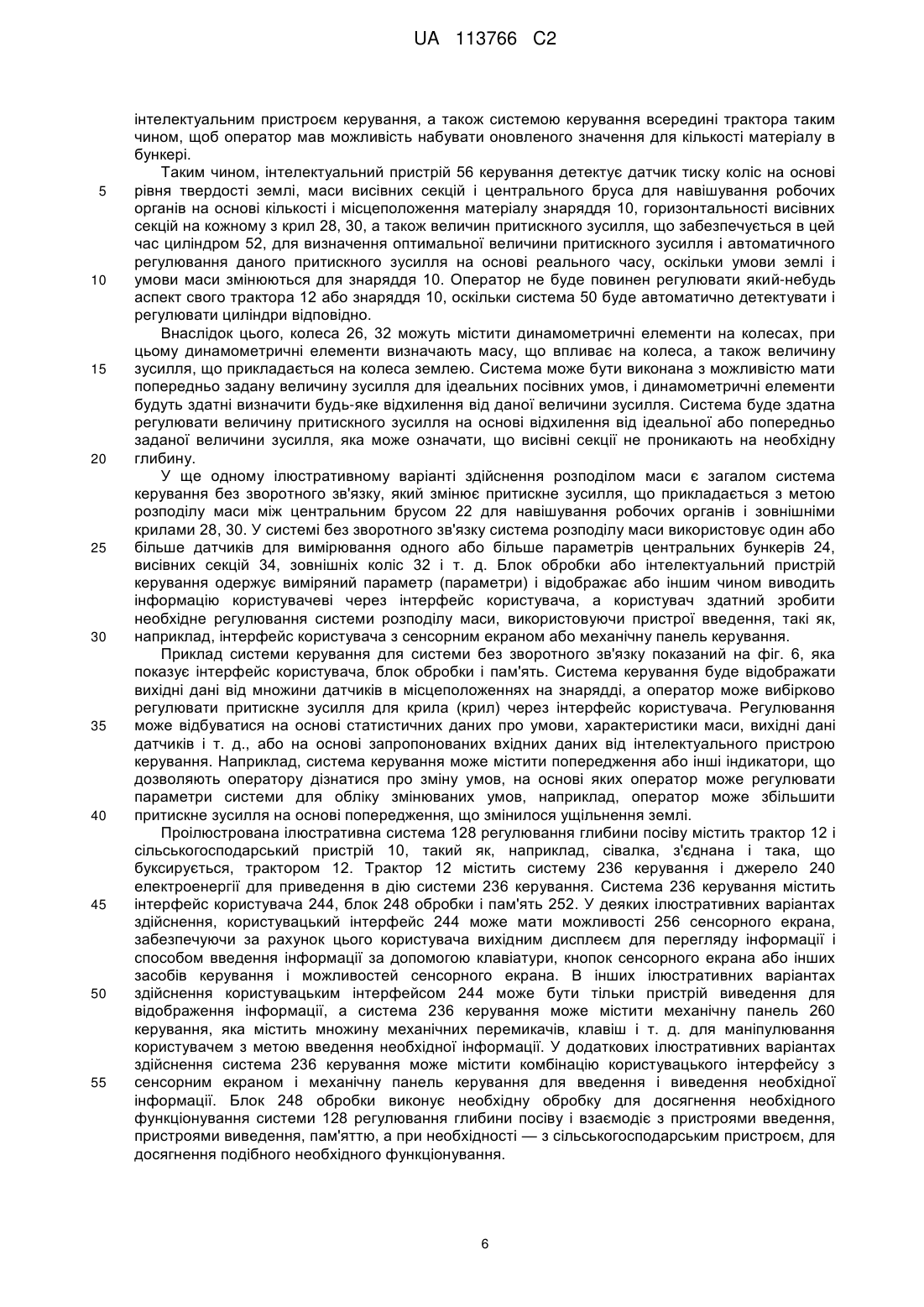
Текст
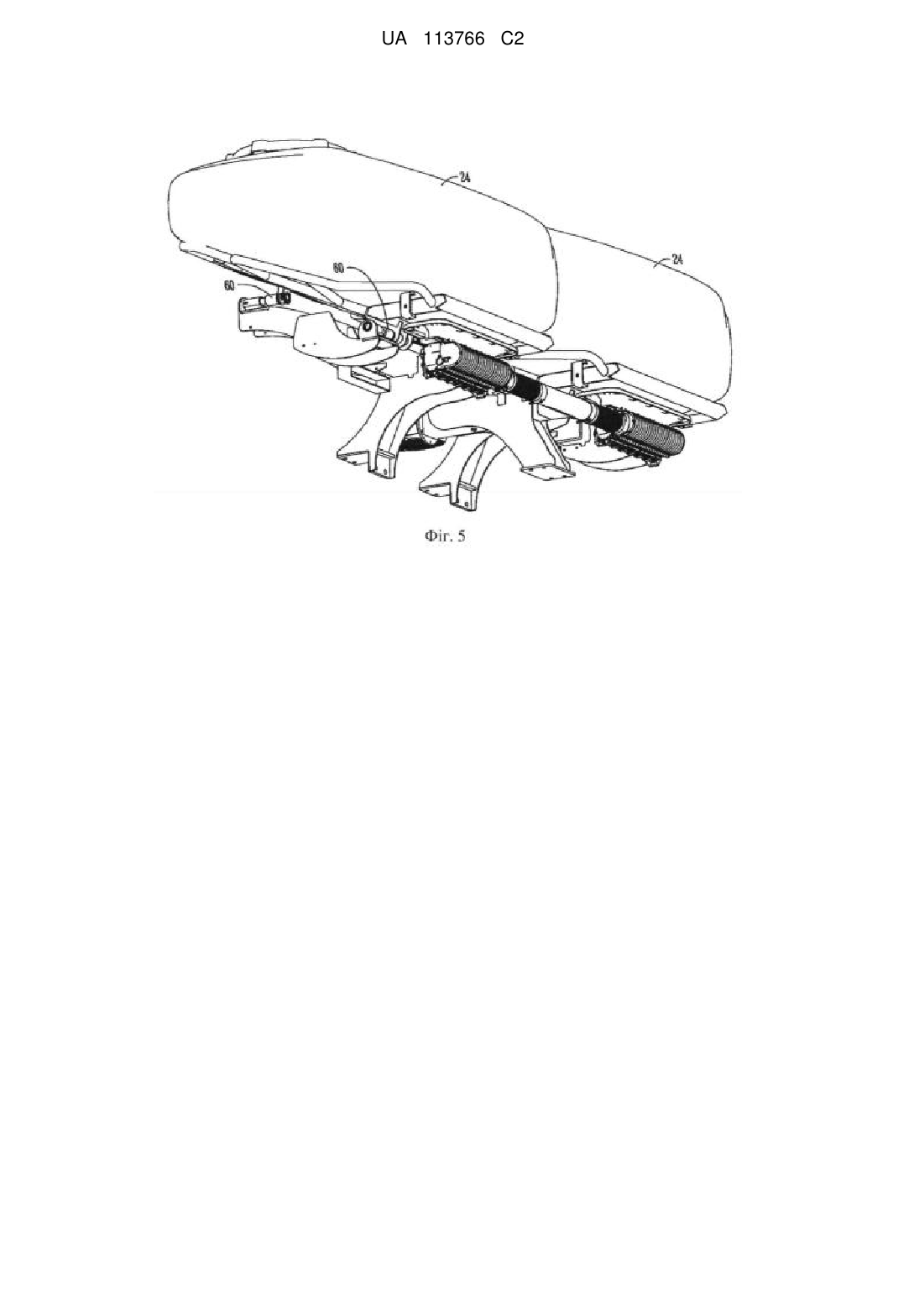
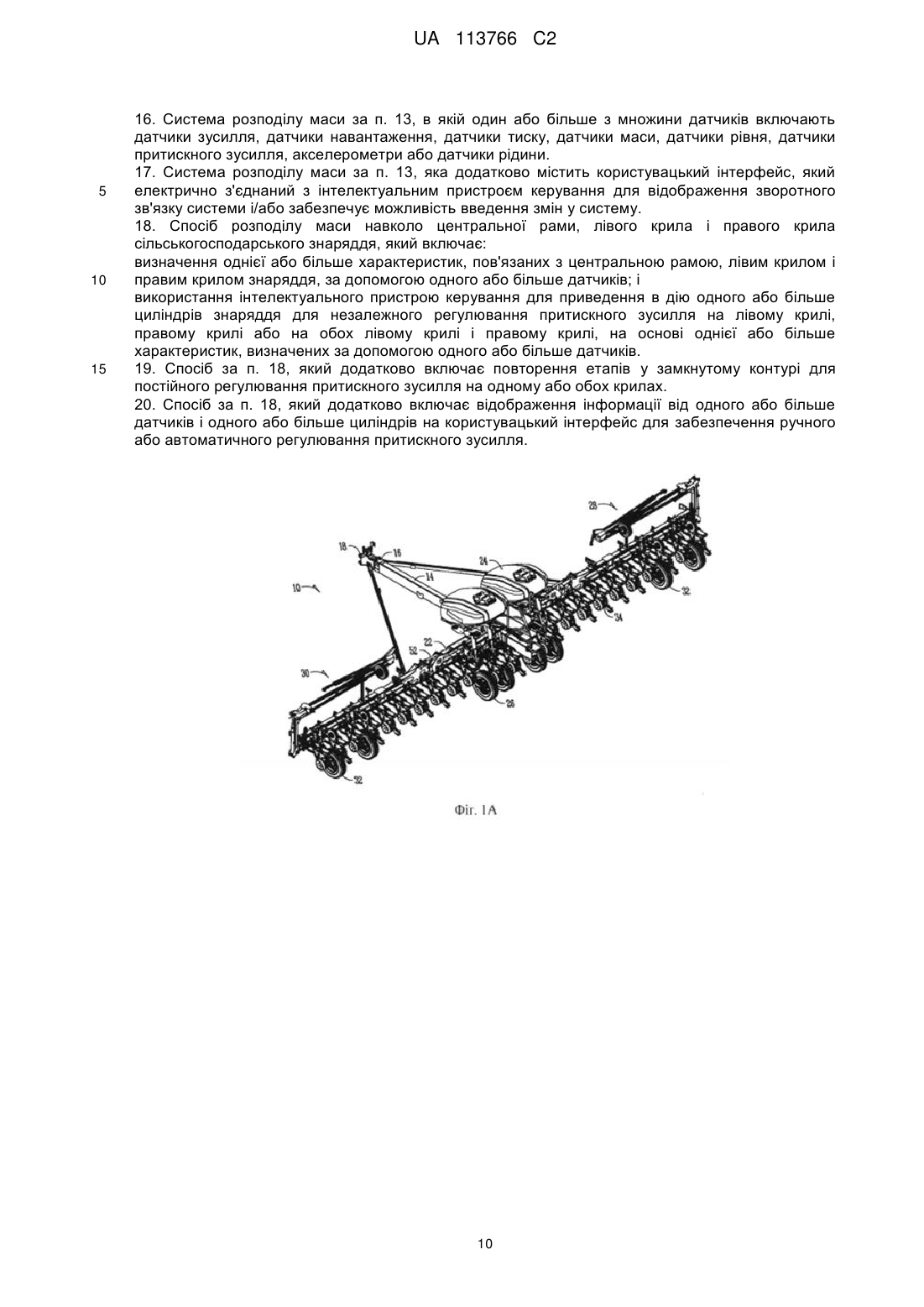
Реферат: Запропоноване сільськогосподарське знаряддя (10), яке має дишло (14), центральний брус (22) для навішування робочих органів, що продовжується від дишла, і перше і друге крила (28, 30), що продовжуються по суті назовні від центрального бруса для навішування робочих органів. Знаряддя може містити систему (24) центральних бункерів для забезпечення матеріалу в окремі висівні секції (34) вздовж центрального бруса для навішування робочих органів і крил, або може містити окремі бункери (39), розташовані на кожній з висівних секцій вздовж бруса для навішування робочих органів. Зі знаряддям використовується система (50) розподілу маси для оновлення і регулювання величини притискного зусилля, що прикладається до зовнішнього бруса для навішування робочих органів або крил, і окремі висівні секції. Система розподілу містить інтелектуальний пристрій керування (56), з'єднаний з датчиками (58, 59, 60, 62, 64) і циліндрами (52). Внаслідок цього інтелектуальний пристрій керування одержує інформацію від датчиків і регулює циліндри відповідно для забезпечення відповідної величини притискного зусилля і для регулювання притискного зусилля на основі реального часу, і може являти собою систему із зворотним зв'язком або без зворотного зв'язку. UA 113766 C2 (12) UA 113766 C2 UA 113766 C2 5 10 15 20 25 30 35 40 45 50 55 60 ОПИС ПЕРЕХРЕСНЕ ПОСИЛАННЯ НА СПОРІДНЕНІ ЗАЯВКИ Відповідно до розділу 35 зведення законів США з 119 в даній заявці запитується пріоритет за попередньою заявкою, серійний номер 61/665357, поданою 28 червня 2012 року, яка включена теперішнім часом у всій своїй повноті. ГАЛУЗЬ ТЕХНІКИ, ДО ЯКОЇ НАЛЕЖИТЬ ВИНАХІД Загалом, запропонований винахід стосується галузі сільськогосподарського обладнання. Конкретніше, але не виключно, винахід стосується системи розподілу маси знаряддя, наприклад, сівалки, в процесі використання знаряддя. РІВЕНЬ ТЕХНІКИ В міру збільшення потужності тракторів і сільськогосподарської ефективності, збільшувалися розмах або ширина сільськогосподарських знарядь, наприклад, сівалок, для пристосування до більших кількостей окремих висівних секцій. Сівалки звичайно містять головну раму, яка має попереду зчіпний вузол для буксирування трактором і ліві і праві крилові секції, шарнірно прикріплені до ділянки головної рами. З'єднання крил, що повертаються, забезпечують можливість складання крил відносно головної рами для транспортування і зберігання сівалки. У традиційних сівалках для просапних культур використовують окремі насіннєві бункери, прикріплені до кожної окремої висівної секції для посіву насіння. Для них потрібне заповнення насінням з мішків вручну, або за допомогою шнека або за рахунок потоку під дією сили тяжіння з контейнерів для посівних одиниць, які постачає насіннєва компанія. Процес є трудомістким і витратним за часом, тому були розроблені системи, за допомогою яких великі розташовані по центру насіннєві бункери можна заповнювати великими партіями під дією сили тяжіння за допомогою насіннєвої тендерної системи з шнеками або коробами, економлячи час і скорочуючи трудовитрати. Однак, додавання розташованих по центру насіннєвих бункерів створює додаткові проблеми. Бункери додають істотну масу (понад 5000 фунтів) на центральні транспортні осі за рахунок переміщення попередньо розподіленої маси в центр сівалки. Додаткова маса істотно підвищує контактний тиск головних транспортувальних шин на ґрунт, спричиняючи ущільнення, яке може приводити до зниженого виходу продукції з одиниці площі. Перерозподіл маси також видаляє приблизно 200 фунтів потенційної маси з кожної окремої висівної секції. Висівним секціям сівалки потрібне притискне зусилля для полегшення і збереження проникнення в ґрунт їх лез сошників для нарізання насіннєвої борозни постійної глибини в ґрунті для посіву. При видаленій тепер масі локальних насіннєвих бункерів, постійність проникнення в ґрунт і глибини борозни в твердому ґрунті, особливо в ґрунті без обробки, знаходиться під загрозою. Для допомоги в протидії даній проблемі, був використаний засіб прикладення пружинного, пневматичного або гідравлічного притискного зусилля до висівних секцій. Притискне зусилля привело до ще однієї проблеми. Притискне зусилля створює підняття бруса для навішування робочих органів, на якому встановлені висівні секції, зменшуючи силу зчеплення з ґрунтом і контактний тиск шин на землю, що приводить до проковзування шин з фрикційним приводом на поверхні землі. Зміна може приводити до огріхів посіву або непостійного інтервалу, який може згубно впливати на вихід продукції з одиниці площі. Для протидії згаданим вище проблемам був використаний засіб прикладення притискного зусилля між центральною рамою сівалки і крилами бруса для навішування робочих органів у точках згинання крил, які слідують рельєфу. Притискне зусилля ефективно поліпшувало обидві ситуації, але тільки для випадку із заданим навантаженням, оскільки зусилля, що прикладається, є постійним. Оскільки поле може містити змінювану твердість і умови землі, величина притискного зусилля, що прикладається в одній області, може бути не придатною для інших областей. Таким чином, поле не буде засіяне систематично, що буде впливати на загальний вихід продукції з одиниці площі для поля. Внаслідок цього, в даній галузі існує необхідність в системі, яка може керувати величиною притискного зусилля, що прикладається до центрального бруса для навішування робочих органів і крил таким чином, що глибина посіву буде постійною, а ґрунтове ущільнення мінімізоване для варіюючих умов твердості землі. Також в даній галузі існує потреба в системі, яка буде автоматично оновлювати величину притискного зусилля, що прикладається до крил на основі змін в режимі реального часу твердості землі в полі. СУТЬ ВИНАХОДУ Внаслідок цього, основна задача, особливість і/або перевага запропонованого винаходу полягає в подоланні недоліків у даній галузі. 1 UA 113766 C2 5 10 15 20 25 30 35 40 45 50 55 60 Ще одна задача, особливість і/або перевага запропонованого винаходу полягає в створенні системи, яка буде виявляти твердість землі для визначення правильної величини притискного зусилля, що прикладається до крил сівалки. Ще одна задача, особливість і/або перевага запропонованого винаходу полягає в створенні системи, яка буде автоматично регулювати величину притискного зусилля, що прикладається до крил на основі твердості землі, маси бункера і/або інших факторів. Ще одна задача, особливість і/або перевага запропонованого винаходу полягає в створенні системи керування без зворотного зв'язку, який забезпечує оператору можливість регулювати величину притискного зусилля, що прикладається до крил, на основі інформації, одержаної датчиками на брусі для навішування робочих органів, крилах і висівних секціях. Ще одна додаткова задача, особливість і/або перевага запропонованого винаходу полягає в створенні системи керування із зворотним зв'язком, який змінює притискне зусилля, що прикладається з метою розподілу маси між центральною секцією і зовнішніми криловими секціями сільськогосподарського знаряддя, на основі постійно змінюваної, вимірюваної або розраховуваної частки в загальній масі на будь-якому або всіх опорних колесах, що входять у зчеплення із землею, для розподілу навантаження і мінімізації ущільнення землі. Ще одна додаткова задача, особливість і/або перевага запропонованого винаходу полягає в створенні системи керування автоматичною оптимізацією глибини розміщення насіння і мінімізацією ущільнення поля за допомогою системи датчиків для вимірювання і урівноваження навантаження на колеса з миттєвим регулюванням гідравлічної сили сівалки. Дані і/або інші задачі, особливості і переваги запропонованого винаходу будуть очевидні фахівцям в даній галузі техніки. Запропонований винахід не треба обмежувати даними задачами, особливостями і перевагами. Не треба, щоб єдиний варіант здійснення забезпечував всі до єдиної задачі, особливості або переваги. Винахід містить систему керування, яка змінює притискне зусилля, що прикладається, для розподілу маси між центральною секцією і зовнішніми криловими секціями сільськогосподарського знаряддя, на основі постійно змінюваної, вимірюваної або розраховуваної частки в загальній масі на будь-якому або всіх опорних колесах, що входять у зчеплення із землею, для розподілу навантаження і мінімізації ущільнення землі. Система використовує системи визначення маси або визначення рівня для встановлення частки центральної осі в загальній масі матеріалів, що містяться в розташованих по центру камерах, і буде використовувати це нарівні з інформацією про масу машини для розрахунку відповідної величини притискного зусилля або тиску на зовнішні крила і їх опорні колеса. Система може бути без зворотного зв'язку, при цьому притискне зусилля змінює оператор, або із зворотним зв'язком, при цьому система автоматично оновлює величину притискного зусилля на основі інформації від одного або більше датчиків знаряддя. Як альтернативу, можна використовувати будь-які комбінації множини різних систем визначення маси і/або рівня, або розраховуваної на основі маси датчика витрати зменшення для включення також маси матеріалів насіння, добрив й інсектицидів у висівній секції і включення їх в розподілену масу в реальному часі проти обчислення притискного зусилля. Згідно з аспектом винаходу, запропоноване сільськогосподарське знаряддя. Знаряддя містить дишло, що має перший кінець, який містить зчеп, і протилежний другий кінець. На другому кінці дишла розташований центральний брус для навішування робочих органів, при цьому центральний брус для навішування робочих органів містить центральні колеса, що продовжуються від нього. Від протилежних сторін центрального бруса для навішування робочих органів продовжуються праве і ліве крила, при цьому кожне з першого і другого крил містить колеса крил, які продовжуються від них. Система розподілу маси функціонально з'єднана з центральним брусом для навішування робочих органів, першим крилом і другим крилом. Система розподілу маси виконана з можливістю регулювання притискного зусилля на крилах для забезпечення проникнення в землю і для зчеплення висівних секцій з ґрунтом, або автоматично або за рахунок інформації, що вводиться оператором. Система може перерозподіляти масу знаряддя для обліку змін характеристик знаряддя (навантаження, розташування матеріалу і т. д.), а також змін характеристик ґрунту (твердості, вологості, компактності і т. д.). Згідно з ще одним аспектом винаходу запропонована система розподілу маси для знаряддя з множиною висівних секцій, розташованих на центральній рамі, лівим крилом і правим крилом. Система містить інтелектуальний пристрій керування, множину датчиків, зв'язаних з множиною висівних секцій і з'єднаних з інтелектуальним пристроєм керування, і множину циліндрів, функціонально з'єднаних з інтелектуальним пристроєм керування і лівим, і правим крилами. Інтелектуальний пристрій керування виконаний з можливістю використання інформації від 2 UA 113766 C2 5 10 15 20 25 30 35 40 45 50 55 датчиків для регулювання множини циліндрів таким чином, що крила одержують притискне зусилля на основі інформації, одержаної від одного або більше з множини датчиків. Згідно з ще одним аспектом винаходу запропонований спосіб розподілу маси навколо центральної рами, лівого крила і правого крила сільськогосподарського знаряддя. Спосіб включає визначення однієї або більше характеристик знаряддя, землі або і того, й іншого, за допомогою одного або більше датчиків, і регулювання одного або більше циліндрів знаряддя для регулювання притискного зусилля на лівому крилі, правому крилі або обох, на основі характеристик, визначених за допомогою одного або більше датчиків. КОРОТКИЙ ОПИС КРЕСЛЕНЬ Прикладена формула винаходу викладає дані нові особливості, які характеризують винахід. Однак, сам винахід, а також його додаткові задачі і переваги, стануть зрозумілішими за допомогою посилання на наступний докладний опис варіанту здійснення, зроблений в поєднанні з супроводжуючими креслення, на яких однаковими посилальними позиціями позначені однакові елементи на всіх різних кресленнях, на яких: Фіг. 1A і 1B являють собою вигляди в перспективі сільськогосподарського знаряддя для використання з системами запропонованого винаходу; Фіг. 2 являє собою вигляд у вертикальному розрізі позаду знаряддя за п. 1; Фіг. 3 являє собою зображення висівної секції для використання з системами розподілу маси запропонованого винаходу; Фіг. 4 являє собою блок-діаграму системи розподілу маси згідно із запропонованим винаходом; Фіг. 5 являє собою перспективне зображення частини знаряддя, що показує датчики, які розташовані поруч з центральним бункером знаряддя; Фіг. 6 являє собою схему ілюстративної видаленої системи регулювання глибини для знаряддя, що має множину висівних секцій; Фіг. 7 являє собою блок-схему системи розподілу маси згідно із запропонованим винаходом; Фіг. 8 являє собою схематичний вигляд позаду варіанту здійснення знаряддя, що має систему розподілу маси згідно із запропонованим винаходом; Фіг. 9 являє собою збільшений вигляд позаду або частини знаряддя за фіг. 8; Фіг. 10 являє собою збільшений вигляд позаду однієї половини знаряддя за фіг. 8, що має систему розподілу маси; Фіг. 11 являє собою ще один збільшений вигляд частини знаряддя за фіг. 8; і Фіг. 12 являє собою збільшене перспективне зображення циліндра системи розподілу маси згідно з винаходом. Перед докладним поясненням яких-небудь незалежних особливостей і варіантів здійснення винаходу потрібно розуміти, що застосування винаходу не обмежене деталями конструкції і конфігураціями складових частин, викладеними в наступному описі або проілюстрованими на кресленнях. Винахід допускає інші варіанти здійснення і виконання на практиці або здійснення різними способами. Крім того, потрібно розуміти, що фразеологія і термінологія, що використовується в даному документі, призначені для опису і не повинні тлумачитися як обмежувальні. ДОКЛАДНИЙ ОПИС ПЕРЕВАЖНИХ ВАРІАНТІВ ЗДІЙСНЕННЯ ВИНАХОДУ Змісти заявки США № 13/458012, поданої 27 квітня 2012 року, заявки США № 13/457815, поданої 27 квітня 2012 року, і заявки США № 13/457455, поданої 27 квітня 2012 року, включені в даний опис шляхом посилання у всій своїй повноті. Фіг. 1A, 1B і 2-4 показують сільськогосподарське знаряддя 10, в цьому випадку, сівалку для використання з системами згідно із запропонованим винаходом. Знаряддям 10 може бути сівалка, машина для внесення добрив і тому подібне, яку звичайно прикріпляють до трактора 12 і тягнуть за його допомогою. Однак, потрібно розуміти, що знаряддя 10 може пересувати інше обладнання і/або транспортні засоби. Для цілей запропонованого розкриття знаряддя 10 буде називатися сівалка. Фіг. 2 показує вигляд в розрізі позаду знаряддя 10. Знаряддя 10 містить дишло 14, яке має перший кінець 16 і протилежний другий кінець (не показаний). Дишло 14 містить зчеплення 18 на першому кінці 16, при цьому зчеплення 18 з'єднане з трактором 12. На другому кінці 20 дишла 14 знаходиться центральний брус 22 для навішування робочих органів. Дишлом 14 може бути телескопічне дишло, складові частини якого можна вставляти одна в одну таким чином, що знаряддям 10 є знаряддям, що належить до типу з переднім складанням. Однак, запропонований винахід не треба обмежувати подібним знаряддям, що належить до типу з переднім складанням, оскільки він повинен включати будьяке подібне знаряддя для використання в сільськогосподарській промисловості. 3 UA 113766 C2 5 10 15 20 25 30 35 40 45 50 55 60 Як показано на Фіг. 1A, 1B і 2, центральні бункери 24 розташовані на центральному брусі 22 для навішування робочих органів. Бункери 24 виконані з можливістю зберігання насіння, добрив, інсектицидів або інших типів матеріалу для використання в сільському господарстві. Використання центральних бункерів 24 забезпечує можливість додавання великої кількості матеріалу з розташуванням по центру. Однак, як буде обговорюватися, винахід також передбачає використання множини бункерів 39, розташованих в кожній з висівних секцій 34. Коли центральні бункери 24 використовують на центральному брусі 22 для навішування робочих органів, потрібно розуміти, що центральні бункери будуть знаходитися в пневматичному сполученні з кожною з висівних секцій 34. Також з центральним брусом для навішування робочих органів з'єднана множина центральних коліс 26, що продовжуються загалом вниз від центрального бруса 22 для навішування робочих органів. Колеса контактують із землею і підтримують по суті всю масу центральних бункерів 24. Колеса стабілізують знаряддя 10 і загалом являють собою колеса, які контактують із землею, коли знаходяться в робочому положенні або в транспортувальному положенні, наприклад, якщо знаряддям 10 є знаряддя, що складається уперед, так що крила 28, 30 складаються уперед, причому колеса крил 32 не контактують із землею. Від обох сторін бруса 22 для навішування робочих органів продовжуються перше і друге крила 28, 30. Крила 28, 30 загалом ідентичні і є дзеркальними зображеннями одне одного. Внаслідок цього, буде описане тільки одне крило з розумінням того, що інше крило буде загалом мати таку ж конфігурацію. Перше крило 28 містить брус 29. На брусі 29 встановлена множина висівних секцій 34, а також множина коліс 32. Колеса 32 виконані з можливістю контакту із землею велику частину часу. Висівними секціями 34 можуть бути пристрої посіву насіння, пристрої внесення добрив, розприскувачі інсектицидів або інші роздавальні пристрої, диски або плуги. Крила 28, 30 також можуть містити щонайменше один циліндр 42 складання і циліндр 52 притискного зусилля. Додатково передбачається, що множина циліндрів притискного зусилля повинна використовуватися із знаряддям, що має більше секцій. Циліндр (циліндри) 42 складання виконані з можливістю складання крил з положення, показаного на фіг. 1A, 1В і 2, в положення, в якому перше і друге крила 28, 30 загалом знаходяться поруч з дишлом 14 знаряддя 10. Внаслідок цього, циліндри 42 складання повинні бути досить сильними, щоб мати можливість пересування крил. Циліндри 52 притискного зусилля забезпечують зусилля притиснення крил вниз, як показано стрілкою 66, або циліндри 52 можуть підіймати крила в напрямку, протилежному до стрілки 66 для зменшення контактного тиску на землю. Крила може бути необхідно підіймати в процесі повороту або в процесі складання крил. Однак, в міру того, як крила висуваються загалом назовні від центрального бруса 22 для навішування робочих органів, притискне зусилля крил може бути необхідним, щоб забезпечити, що висівні секції 34 проникають в землю або залишаються по суті в зачепленні із землею. Фіг. 3 являє собою зображення висівної секції 34, а конкретніше, пристрою висівання насіння, що містить дозатор 36 насіння, і сівалки для використання із запропонованим винаходом. Висівна секція 34 містить дозатор 36 насіння, сошник 38, рядкові бункери 39 і пристрій 40 закладення борозни. Для того, щоб мати найкращий вихід продукції з одиниці площі, необхідно, щоб насіння висівалося загалом на однакову глибину, а також на правильну глибину для найкращого росту сільськогосподарської культури або рослин. Глибина насіння залежить від множини факторів, наприклад, вмісту вологи в ґрунті, температури ґрунту і т. д., як детальніше описано в заявці США № 13/458012. Запропонований винахід передбачає, що для того, щоб визначити ґрунтові характеристики, знаряддя 10 і трактор 12 можуть містити складові частини заявки '012. Внаслідок цього, множина висівних секцій 34 всі повинні нарізати борозну на основі ґрунтових і насіннєвих характеристик, якими можуть бути приблизно однакова глибина для всіх висівних секцій. Це буде забезпечувати, що все насіння знаходиться в землі на однаковій глибині, незалежно від стану землі. Однак, оскільки твердість землі й інші умови змінюються, може бути проблемою одержання точно такої ж глибини насіння. Як викладено вище, циліндри 52 забезпечують притискне зусилля для першого і другого крил 28, 30. Притискне зусилля необхідне для притиснення висівних секцій 34 в землю з відповідною величиною зусилля для проникнення в землю приблизно на необхідну глибину. Однак, деякі фактори можуть ускладнювати це. Наприклад, коли центральний бункер 24 заповнений матеріалом, велика частина маси знаряддя 10 буде зосереджена на даному центральному брусі 22 для навішування робочих органів. Інші додаткові пристрої, наприклад, резервуари, що містять рідкі добрива або інсектициди, збільшують масу, зосереджену на центральному брусі для навішування робочих органів. Датчик, наприклад, тиску або датчик навантаження, може бути вміщений на дно бункерів або додаткових пристроїв для вимірювання 4 UA 113766 C2 5 10 15 20 25 30 35 40 45 50 55 60 маси матеріалу в бункерах або додаткових пристроях, включаючи масу рідких добрив в резервуарі для рідких добрив додаткових пристроїв. Маса і зусилля, що відчувається на центральному брусі для навішування робочих органів, може викликати підняття крил в напрямку вгору відносно центрального бруса 22 для навішування робочих органів. Внаслідок цього, притискне зусилля, що забезпечується циліндрами 52 притискного зусилля, регулюється для протидії масі центрального бункера, інших додаткових пристроїв і/або твердості землі для того, щоб зберегти рівномірний розподіл маси між всіма висівними секціями. Додатково, коли твердість землі під крилом (крилами) 28, 30 відрізняється від твердості під центральним брусом 22 для навішування робочих органів, може бути необхідно регулювання для збільшення або зменшення притискного зусилля на відповідне крило (крила) для збереження рівномірної глибини розміщення насіння. Крім того, незважаючи на те, що деякі знаряддя забезпечують, що оператор може регулювати притискне зусилля, регулювання притискного зусилля може відбуватися не так швидко, як необхідно, не оновлюватися так часто, як потрібно або не змінюватися зовсім. При тому, що оператор звичайно знаходиться в тракторі 12 в процесі використання знаряддя 10, оператор може не усвідомити зміну умов в полі. Внаслідок цього запропонований винахід містить систему 50 розподілу маси, як показано на фіг. 4. Система 50 розподілу маси містить інтелектуальний пристрій 56 керування, що знаходиться на знарядді 10 або з'єднаний з ним. Множина датчиків, наприклад, датчик 58 тиску, датчик 59 витрати, датчик 60 маси, датчик 62 рівня, датчик 64 притискного зусилля, акселерометр, датчик рідини, датчик навантаження і тому подібне, всі електрично або іншим чином з'єднані з інтелектуальним пристроєм 56 керування. Датчики можуть бути з'єднані з інтелектуальним пристроєм 56 керування за допомогою електричних дротів, або також можуть бути з'єднані бездротовим способом. Інтелектуальний пристрій 56 керування також з'єднаний з циліндрами 52 притискного зусилля. Інтелектуальний пристрій 56 керування одержує дані від множини датчиків, і використовує ці дані для регулювання притискного зусилля, що забезпечується циліндрами 52, для того, щоб забезпечити оптимальне притискне зусилля, щоб мати проникнення в землю висівних секцій 34 на бажаній глибині або близько до неї, або щонайменше залишатися по суті в зачепленні із землею. Також потрібно розуміти, що інтелектуальний пристрій 56 керування може бути розташований на тракторі, наприклад, за допомогою системи керування і тому подібне, де оператор може бачити дані, що одержуються датчиками, і величину притискного зусилля, що забезпечується на крилі (крилах). Інтелектуальний пристрій керування може бути включений в систему керування, як показано на фіг. 4 заявки США № 13/457815, або в іншому місці. Запропонований винахід не треба обмежувати точним місцеположенням інтелектуального пристрою керування, який описаний в ілюстративних варіантах здійснення запропонованого винаходу. Крім того, коли системою є система без зворотного зв'язку, оператор трактора може використовувати систему керування для сполучення з інтелектуальним пристроєм керування для регулювання притискного зусилля на крилі (крилах). У проілюстрованому ілюстративному варіанті здійснення системою розподілу маси є загалом система керування із зворотним зв'язком, який змінює притискне зусилля, що прикладається з метою розподілу маси між центральною секцією або центральним брусом 22 для навішування робочих органів і зовнішніми крилами 28, 30 знаряддя 10. Притискне зусилля змінюється і оновлюється на основі реального часу, на основі постійно змінюваної, вимірюваної або розраховуваної частки в загальній масі на будь-якому або всіх опорних колесах 26, 32, що входять у зчеплення із землею, для розподілу навантаження і мінімізації ущільнення землі, забезпечуючи в той же час також оптимальну глибину проникнення висівними секціями 34. Датчики 60 визначають рівні маси центрального бункера (бункерів) 24 або виявляють рівень крил за допомогою датчика 62 рівня окремих висівних секцій 34 для встановлення частки центрального бруса 22 для навішування робочих органів в загальній масі матеріалів, що містяться в розташованих по центру камерах, і використання даної інформації нарівні з інформацією про масу машини для розрахунку відповідної величини тиску притискного зусилля на зовнішніх крилах 28, 30 і їх опорних колесах 32. Датчиками 60 можуть бути динамометричні елементи, розташовані під бункерами, як показано на фіг. 5. Як показано на зображенні фіг. 5, динамометричний елемент 60 може бути розташований під центральним бункером (бункерами) для надання оновленої маси для кількості матеріалу в бункері (бункерах). Також потрібно помітити, що динамометричний елемент, показаний на фіг. 5, з'єднаний за допомогою проводу з електричним джерелом, яке може бути на тракторі або знарядді, як обговорювалося в заявках США №№ 13/458012, 13/457815 і 13/457577. Динамометричні елементи є одним типом датчика, який може використовуватися із запропонованим винаходом для визначення кількості маси в центральному бункері 24. Динамометричні елементи можуть знаходитися в сполученні з 5 UA 113766 C2 5 10 15 20 25 30 35 40 45 50 55 інтелектуальним пристроєм керування, а також системою керування всередині трактора таким чином, щоб оператор мав можливість набувати оновленого значення для кількості матеріалу в бункері. Таким чином, інтелектуальний пристрій 56 керування детектує датчик тиску коліс на основі рівня твердості землі, маси висівних секцій і центрального бруса для навішування робочих органів на основі кількості і місцеположення матеріалу знаряддя 10, горизонтальності висівних секцій на кожному з крил 28, 30, а також величин притискного зусилля, що забезпечується в цей час циліндром 52, для визначення оптимальної величини притискного зусилля і автоматичного регулювання даного притискного зусилля на основі реального часу, оскільки умови землі і умови маси змінюються для знаряддя 10. Оператор не буде повинен регулювати який-небудь аспект свого трактора 12 або знаряддя 10, оскільки система 50 буде автоматично детектувати і регулювати циліндри відповідно. Внаслідок цього, колеса 26, 32 можуть містити динамометричні елементи на колесах, при цьому динамометричні елементи визначають масу, що впливає на колеса, а також величину зусилля, що прикладається на колеса землею. Система може бути виконана з можливістю мати попередньо задану величину зусилля для ідеальних посівних умов, і динамометричні елементи будуть здатні визначити будь-яке відхилення від даної величини зусилля. Система буде здатна регулювати величину притискного зусилля на основі відхилення від ідеальної або попередньо заданої величини зусилля, яка може означати, що висівні секції не проникають на необхідну глибину. У ще одному ілюстративному варіанті здійснення розподілом маси є загалом система керування без зворотного зв'язку, який змінює притискне зусилля, що прикладається з метою розподілу маси між центральним брусом 22 для навішування робочих органів і зовнішніми крилами 28, 30. У системі без зворотного зв'язку система розподілу маси використовує один або більше датчиків для вимірювання одного або більше параметрів центральних бункерів 24, висівних секцій 34, зовнішніх коліс 32 і т. д. Блок обробки або інтелектуальний пристрій керування одержує виміряний параметр (параметри) і відображає або іншим чином виводить інформацію користувачеві через інтерфейс користувача, а користувач здатний зробити необхідне регулювання системи розподілу маси, використовуючи пристрої введення, такі як, наприклад, інтерфейс користувача з сенсорним екраном або механічну панель керування. Приклад системи керування для системи без зворотного зв'язку показаний на фіг. 6, яка показує інтерфейс користувача, блок обробки і пам'ять. Система керування буде відображати вихідні дані від множини датчиків в місцеположеннях на знарядді, а оператор може вибірково регулювати притискне зусилля для крила (крил) через інтерфейс користувача. Регулювання може відбуватися на основі статистичних даних про умови, характеристики маси, вихідні дані датчиків і т. д., або на основі запропонованих вхідних даних від інтелектуального пристрою керування. Наприклад, система керування може містити попередження або інші індикатори, що дозволяють оператору дізнатися про зміну умов, на основі яких оператор може регулювати параметри системи для обліку змінюваних умов, наприклад, оператор може збільшити притискне зусилля на основі попередження, що змінилося ущільнення землі. Проілюстрована ілюстративна система 128 регулювання глибини посіву містить трактор 12 і сільськогосподарський пристрій 10, такий як, наприклад, сівалка, з'єднана і така, що буксирується, трактором 12. Трактор 12 містить систему 236 керування і джерело 240 електроенергії для приведення в дію системи 236 керування. Система 236 керування містить інтерфейс користувача 244, блок 248 обробки і пам'ять 252. У деяких ілюстративних варіантах здійснення, користувацький інтерфейс 244 може мати можливості 256 сенсорного екрана, забезпечуючи за рахунок цього користувача вихідним дисплеєм для перегляду інформації і способом введення інформації за допомогою клавіатури, кнопок сенсорного екрана або інших засобів керування і можливостей сенсорного екрана. В інших ілюстративних варіантах здійснення користувацьким інтерфейсом 244 може бути тільки пристрій виведення для відображення інформації, а система 236 керування може містити механічну панель 260 керування, яка містить множину механічних перемикачів, клавіш і т. д. для маніпулювання користувачем з метою введення необхідної інформації. У додаткових ілюстративних варіантах здійснення система 236 керування може містити комбінацію користувацького інтерфейсу з сенсорним екраном і механічну панель керування для введення і виведення необхідної інформації. Блок 248 обробки виконує необхідну обробку для досягнення необхідного функціонування системи 128 регулювання глибини посіву і взаємодіє з пристроями введення, пристроями виведення, пам'яттю, а при необхідності — з сільськогосподарським пристроєм, для досягнення подібного необхідного функціонування. 6 UA 113766 C2 5 10 15 20 25 30 35 40 45 50 55 60 Продовжуючи з посиланням на Фігуру 6, сільськогосподарським пристроєм може бути сівалка 10, при цьому сівалка 10 може містити множину висівних секцій 34 сівалки. Сівалка 10 може містити будь-яку кількість висівних секцій 34, прикладом яких можуть служити анотації: Висівна секція #1; Висівна секція #2; Висівна секція #N. Як указано вище, висівні секції 34 можуть бути по суті однаковими і, внаслідок цього, детально показані тільки деталі висівної секції #1. Потрібно розуміти, що всі висівні секції 34 можуть містити складові частини і функціональність, аналогічні складовим частинам і функціональності висівної секції #1, але заради стислості подібні складові частини і функціональність не буде запропонована в даному описі. Як альтернатива, система 50 розподілу маси може використовувати будь-яку комбінацію множини різних систем визначення рівнів і/або маси, або зменшення маси на основі датчика витрати, що розраховується, для включення маси матеріалів, насіння, добрив і інсектицидів у висівних секціях, і включати їх в перше обчислення притискного зусилля в реальному часі на основі розподіленої маси. Даний альтернативний спосіб може використовуватися, коли висівні секції містять окремі бункери, а не забезпечуються всі з центральних бункерів 24. Крім того, потрібно розуміти, що датчики розташовані в кожній з висівних секцій 34 або в групах висівних секцій таким чином, що інтелектуальний пристрій 56 керування буде одержувати інформацію від кожної з висівних секцій 34 або груп висівних секцій для того, щоб правильно регулювати величину тиску притискного зусилля циліндрами 52. Інтелектуальний пристрій 56 керування буде розраховувати інформацію від кожного з датчиків на кожній з висівних секцій 34 або груп висівних секцій для того, щоб визначити відповідну величину притискного зусилля. Таким чином, в міру того, як знаряддя 10 рухається через поле, неважливо, якщо поле містить умови як твердої, так і м'якої землі. Система 50 розподілу маси запропонованого винаходу буде враховувати всякі і всі зміни умов в полі, включаючи, але без обмеження, рівні твердості землі, зміну рівності поля, зміну нахилу поля, зміну ґрунтових умов і т. д. Фіг. 7 являє собою блок-схему, що показує один процес ілюстративного прикладу системи 50 розподілу маси запропонованого винаходу. Перший етап 70 системи 50 забезпечує, що система вмикається. Оператор в тракторі 12 або в іншому транспортному засобі може вибірково вмикати і вимикати систему розподілу. Важливо, щоб система не була увімкнена в процесі транспортування знаряддя з одного поля на інше, з місця зберігання в полі, з поля місце зберігання і тому подібне. Система повинна бути увімкнена, тільки коли знаряддя використовується для призначеної для нього мети. Однак, потрібно розуміти, що запропонований винахід також містить додатковий датчик, так що система 50 автоматично визначає, коли вмикатися, наприклад, коли оператор активував знаряддя 10 або почав розподіл матеріалу із знаряддя 10. Далі, етап, показаний під позицією 72, включає визначення інформації, що надається датчиками. Фіг. 4 показує, що ці датчики можуть включати датчик 58 тиску, датчик 60 маси, датчик 62 рівня, датчик 64 притискного зусилля, датчик 59 витрати, датчик визначення твердості землі, датчик ущільнення і тому подібне. Запропонований винахід передбачає, що не всі згадані датчики повинні використовуватися з винаходом, а також, що будь-які інші не згадані датчики можуть бути включені як частина винаходу. Після того, як інтелектуальний пристрій 56 керування одержав інформацію від множини датчиків у множині висівних секцій 34, етап, показаний в блоці 74 запитує, чи розподілена маса системи між висівними секціями 34 і/або знаряддям 10 з необхідною нормою. Способи і системи визначення глибини борозен, насіння і висівних секцій можуть бути знайдені в заявках США №№ 13/458012, 13/457815 і 13/457577, які всі включені в даний винахід у всій своїй повноті. Внаслідок цього, система може містити датчики, наприклад, оптичні датчики, ультразвукові датчики і тому подібне, які можуть визначати глибину борозен і насіння. Потім дана інформація може бути послана в інтелектуальний пристрій керування і/або систему керування трактора. Незважаючи на те, що етап 74 запитує про розподіл маси знаряддя 10, потрібно розуміти, що коли знаряддям 10 є пристрій внесення добрив, датчик близькості може виявляти відстань від дозатора знаряддя до землі або сільськогосподарської культури, так що запитується глибина, чи є відстань між передньою частиною дозатора і землею або сільськогосподарською культурою загалом однаковою між окремими висівними секціями 34. Додатково, оскільки знаряддям можуть бути знаряддя інших типів, точне питання, показане в блоці 74, відповідно, може варіювати. Якщо відповіддю в блок 74 є так, система автоматично повертається до визначення і одержують інформацію від датчиків. У даній точці система повторно визначає інформацію від датчиків для визначення тиску, маси, відстані, притискного зусилля, рівня і тому подібне. Внаслідок цього, система 50 може бути встановлена на систему реального часу і автоматичного 7 UA 113766 C2 5 10 15 20 25 30 35 40 45 50 55 60 оновлення. Якщо відповіддю в блок 74 є ні, інтелектуальний пристрій 56 керування взаємодіє з циліндрами 52 притискного зусилля для регулювання виконавчих механізмів, які регулюютьрозподіл маси знаряддя 10, як показано в блоці 76. Наприклад, якщо твердість землі збільшилася, інтелектуальний пристрій 56 керування взаємодіє з циліндром 52 для перерозподілу притискного зусилля на крилах 28, 30 і висівних секціях 34 таким чином, щоб висівні секції могли проникати в землю з більшим тиском або меншим тиском. Вона може також зменшити деяку масу в центральних бункерах і/або в центральних висівних секціях. Як показано стрілкою з блока 76, після того, як маса була перерозподілена, інтелектуальний пристрій керування знову продовжує одержувати інформацію від множини датчиків для визначення даних від датчиків. Процес знову визначає, чи є необхідним розподіл маси на основі інформації, одержаної від датчиків, і регулює відповідно. Даний процес продовжується під час всього використання знаряддя з системою 50 розподілу, яка безперервно регулює при необхідності розподіл маси і притискного зусилля на крилах і висівних секціях. Крім того, потрібно розуміти, що інтелектуальний пристрій керування швидко одержує інформацію від датчиків, так що розподіл маси і/або притискного зусилля можна швидко регулювати (наприклад, регулювати кожні 5 мілісекунд або менше). Фіг. 8-12 показують додаткові варіанти здійснення системи перенесення маси згідно із запропонованим винаходом. Фіг. 8 являє собою вигляд у вертикальному розрізі позаду сівалки 500 з центральними бункерами 502, розташованими на центральному брусі 504 для навішування робочих органів. Перше і друге крила 506, 508 висунуті назовні від центрального бруса 504 для навішування робочих органів. Циліндри 510 притискного зусилля шарнірно встановлені між центральним брусом 504 для навішування робочих органів і крилами 506, 508. Циліндрами можуть бути електричні циліндри, пневматичні циліндри, гідравлічні циліндри і тому подібне. Циліндри повинні бути досить потужними для забезпечення на крилах притискного зусилля (як позитивного, так і негативного). Стрілка 514 показує зусилля від маси матеріалу в бункерах. Стрілки 516 показують, що, коли циліндри 510 висуваються в напрямку стрілок 516, кінцевим результатом буде притискне зусилля на крилах 506, 508, забезпечуючи таким чином крилам додаткове притискне зусилля. Як альтернатива, коли величину притискного зусилля необхідно зменшити (негативне зусилля), циліндри 510 втягуються в напрямку протилежних стрілок 516, що буде забезпечувати підіймальне зусилля на крилах. Фіг. 9 являє собою збільшений вигляд в розрізі позаду сівалки 500 фіг. 8. Фіг. 9 показує великий план бункерів 502, показуючи в той же час також місцеположення циліндрів 510 притискного зусилля і важелів 512. Фіг. 10 являє собою збільшений вигляд позаду сівалки 500 фіг. 8, що показує множину висівних секцій 518, нарівні з циліндром 510 притискного зусилля і важелем 512. Аналогічно з варіантами здійснення, описаними вище, сівалка 500 може містити систему розподілу маси запропонованого винаходу або із зворотним зв'язком, або без зворотного зв'язку. Висівні секції 518 і центральні бункери 502 можуть містити множину датчиків, пов'язаних з тиском або масою блоків, характеристиками ґрунту, глибиною насіння, глибиною борозни, ущільненням і тому подібне. Датчики з'єднані з інтелектуальним пристроєм керування, а також можливо системою керування в тракторі, який буксирує сівалку. У системі із зворотним зв'язком інтелектуальний пристрій керування одержує інформацію від множини датчиків на основі реального часу, і автоматично регулює величину притискного зусилля, що забезпечується циліндрами 510 для обліку ґрунтових характеристик, змінюваної маси сівалки і вимог глибини насіння. У системі без зворотного зв'язку, дані, які збираються датчиками, одержує система керування, яка відображає інформацію оператору/фермеру. Тоді оператор здатний регулювати параметри системи керування для регулювання величини притискного зусилля на крило (крила) для пристосування до умов. Фіг. 11 і 12 являють собою додаткові зображення системи перенесення маси і системи розподілу маси варіанта здійснення, описаного раніше. Необхідно помітити, що системи можуть містити електричні проводи, гідравлічні з'єднання, пневматичні з'єднання і тому подібне для приведення в дію і керування датчиками, циліндрами і складовими частинами систем. Внаслідок цього були розкриті система розподілу маси для знаряддя і спосіб застосування. Запропонований винахід передбачає множину варіантів, опцій і альтернатив, і його не треба обмежувати цими конкретними варіантами здійснення, описаними в даному документі. Наприклад, кількість датчиків і типи датчиків можуть варіювати згідно з типом використовуваного знаряддя. Крім того, більше циліндрів може бути надано між центральним брусом для навішування робочих органів і крилами, а також на крилах, для регулювання висівних секцій окремо. Внаслідок цього датчик може бути передбачений між брусом 29 крила і висівною секцією 34 таким чином, що окремі висівні секції можуть мати притискне зусилля для 8 UA 113766 C2 вказаної висівної секції для регулювання за потреби. Інші зміни вважаються частиною запропонованого винаходу. ФОРМУЛА ВИНАХОДУ 5 10 15 20 25 30 35 40 45 50 55 1. Сільськогосподарське знаряддя, яке містить: дишло, що має перший кінець, який містить зчеп, і протилежний другий кінець; центральний брус для навішування робочих органів на другому кінці дишла, при цьому центральний брус для навішування робочих органів містить центральні колеса, що продовжуються від нього; перше крило і друге крило, які продовжуються від протилежних сторін центрального бруса для навішування робочих органів, причому кожне з першого крила і другого крил містить колеса крил, які продовжуються від них; і систему розподілу маси, функціонально з'єднану з центральним брусом для навішування робочих органів, першим крилом і другим крилом, при цьому система розподілу маси містить множину датчиків і виконана з можливістю регулювання притискного зусилля на перше крило і друге крило щонайменше частково на основі відносних навантажень, які діють на центральні колеса і колеса крил. 2. Сільськогосподарське знаряддя за п. 1, в якому множина датчиків функціонально з'єднана з множиною циліндрів так, що система розподілу маси автоматично регулює множину циліндрів на основі множини датчиків для перерозподілу навантаження на центральних колесах і колесах крил. 3. Сільськогосподарське знаряддя за п. 2, що додатково містить інтелектуальний пристрій керування, функціонально з'єднаний з системою розподілу маси, виконаний з можливістю визначення твердості землі для регулювання множини циліндрів. 4. Сільськогосподарське знаряддя за п. 3, в якому множина датчиків розташована на центральних колесах і колесах крил. 5. Сільськогосподарське знаряддя за п. 4, в якому множина датчиків включає датчики тиску. 6. Сільськогосподарське знаряддя за п. 4, в якому множина датчиків включає датчики навантаження. 7. Сільськогосподарське знаряддя за п. 4, в якому система розподілу маси додатково включає датчик рівня. 8. Сільськогосподарське знаряддя за п. 4, в якому система розподілу маси додатково включає обчислення зменшення маси на крилах на основі датчика витрати. 9. Сільськогосподарське знаряддя за п. 8, в якому розраховуване на основі датчика витрати зменшення маси включає масу матеріалів насіння, добрив або інсектицидів у висівній секції, для визначення розподіленої маси в реальному часі відносно обчислення притискного зусилля. 10. Сільськогосподарське знаряддя за п. 1, яке додатково містить множину бункерів, розташованих на центральному брусі для навішування робочих органів або першому і другому крилах. 11. Сільськогосподарське знаряддя за п. 1, в якому системою розподілу маси є система із зворотним зв'язком, в якій притискне зусилля регулюється автоматично. 12. Сільськогосподарське знаряддя за п. 1, в якому системою розподілу маси є система без зворотного зв'язку, в якій притискне зусилля регулюється вручну. 13. Система розподілу маси для знаряддя з множиною висівних секцій, розташованих на центральній рамі, лівому крилі і правому крилі, яка містить: інтелектуальний пристрій керування; множину датчиків, пов'язаних з множиною висівних секцій і з'єднаних з інтелектуальним пристроєм керування; і множину циліндрів, функціонально з'єднаних з інтелектуальним пристроєм керування і лівим і правим крилами; при цьому інтелектуальний пристрій керування виконаний з можливістю використання інформації від датчиків для регулювання множини циліндрів таким чином, що крила одержують притискне зусилля на основі інформації, одержаної від одного або більше з множини датчиків. 14. Система розподілу маси за п. 13, яка є системою із зворотним зв'язком, яка автоматично регулює притискне зусилля. 15. Система розподілу маси за п. 13, яка є системою без зворотного зв'язку, в якій притискне зусилля регулюється вручну. 9 UA 113766 C2 5 10 15 16. Система розподілу маси за п. 13, в якій один або більше з множини датчиків включають датчики зусилля, датчики навантаження, датчики тиску, датчики маси, датчики рівня, датчики притискного зусилля, акселерометри або датчики рідини. 17. Система розподілу маси за п. 13, яка додатково містить користувацький інтерфейс, який електрично з'єднаний з інтелектуальним пристроєм керування для відображення зворотного зв'язку системи і/або забезпечує можливість введення змін у систему. 18. Спосіб розподілу маси навколо центральної рами, лівого крила і правого крила сільськогосподарського знаряддя, який включає: визначення однієї або більше характеристик, пов'язаних з центральною рамою, лівим крилом і правим крилом знаряддя, за допомогою одного або більше датчиків; і використання інтелектуального пристрою керування для приведення в дію одного або більше циліндрів знаряддя для незалежного регулювання притискного зусилля на лівому крилі, правому крилі або на обох лівому крилі і правому крилі, на основі однієї або більше характеристик, визначених за допомогою одного або більше датчиків. 19. Спосіб за п. 18, який додатково включає повторення етапів у замкнутому контурі для постійного регулювання притискного зусилля на одному або обох крилах. 20. Спосіб за п. 18, який додатково включає відображення інформації від одного або більше датчиків і одного або більше циліндрів на користувацький інтерфейс для забезпечення ручного або автоматичного регулювання притискного зусилля. 10 UA 113766 C2 11 UA 113766 C2 12 UA 113766 C2 13 UA 113766 C2 14 UA 113766 C2 15 UA 113766 C2 16 UA 113766 C2 Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 17
ДивитисяДодаткова інформація
Назва патенту англійськоюWeight distribution system for seed planters and product applicators
Автори англійськоюBachman, Marvin, Hahn, Dustan
Автори російськоюБахман Марвин, Хан Дустан
МПК / Мітки
МПК: A01B 73/04, A01B 63/24, A01C 7/20
Мітки: система, насіннєвих, внесення, машин, продуктів, розподілу, сівалок, маси
Код посилання
<a href="https://ua.patents.su/19-113766-sistema-rozpodilu-masi-dlya-nasinnehvikh-sivalok-i-mashin-dlya-vnesennya-produktiv.html" target="_blank" rel="follow" title="База патентів України">Система розподілу маси для насіннєвих сівалок і машин для внесення продуктів</a>
Жатка для розподілу скошеної маси на зернову та стеблову
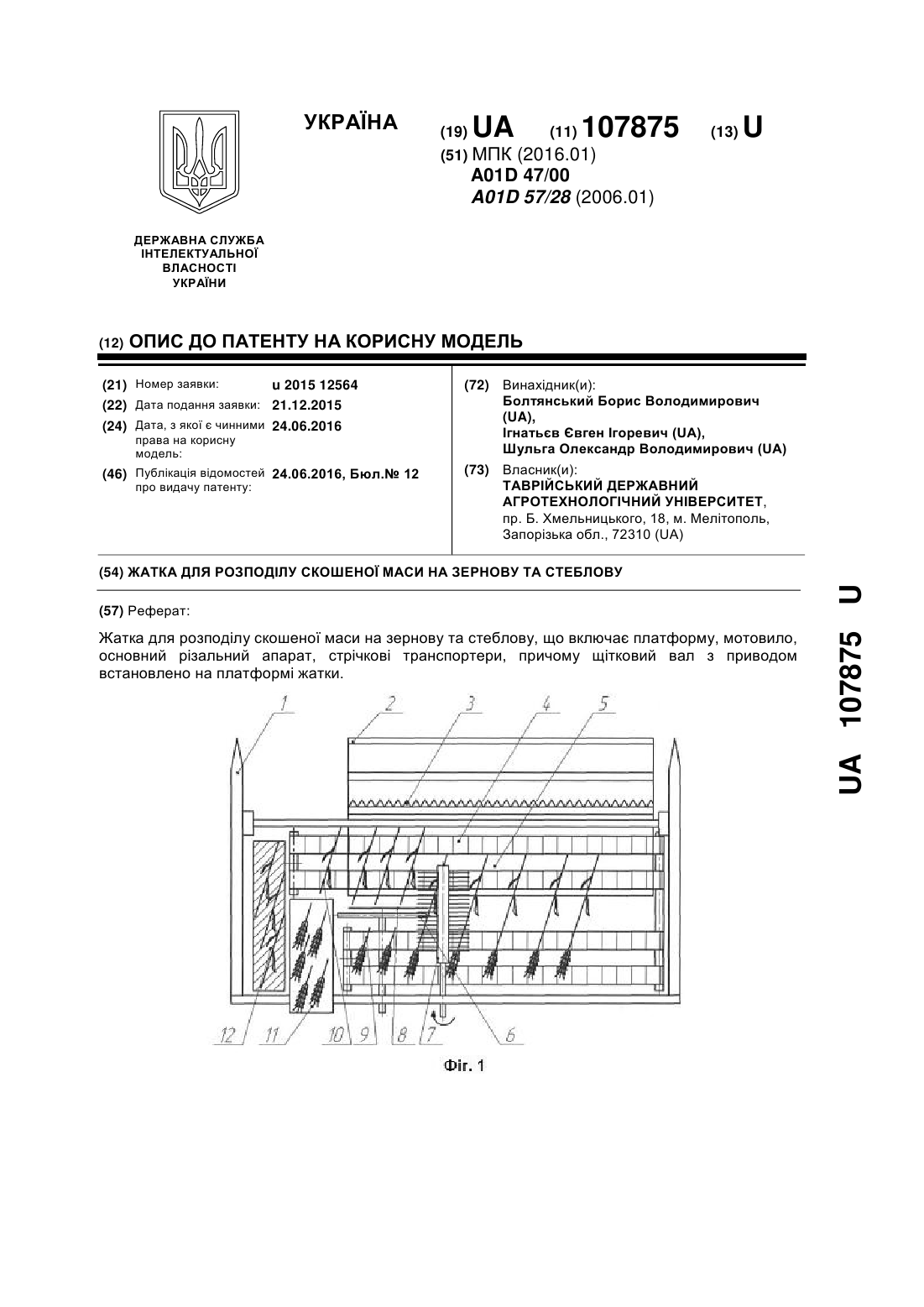
Номер патенту: 107875
Опубліковано: 24.06.2016
Автори: Ігнатьєв Євген Ігоревич, Шульга Олександр Володимирович, Болтянський Борис Володимирович
МПК: A01D 47/00, A01D 57/28
Мітки: жатка, стеблову, зернову, маси, розподілу, скошеної
Формула / Реферат:
Жатка для розподілу скошеної маси на зернову та стеблову, що включає платформу, мотовило, основний різальний апарат, стрічкові транспортери, яка відрізняється тим, що щітковий вал з приводом встановлено на платформі жатки.
Жатка для розподілу зрізаної маси на зернову та стеблову
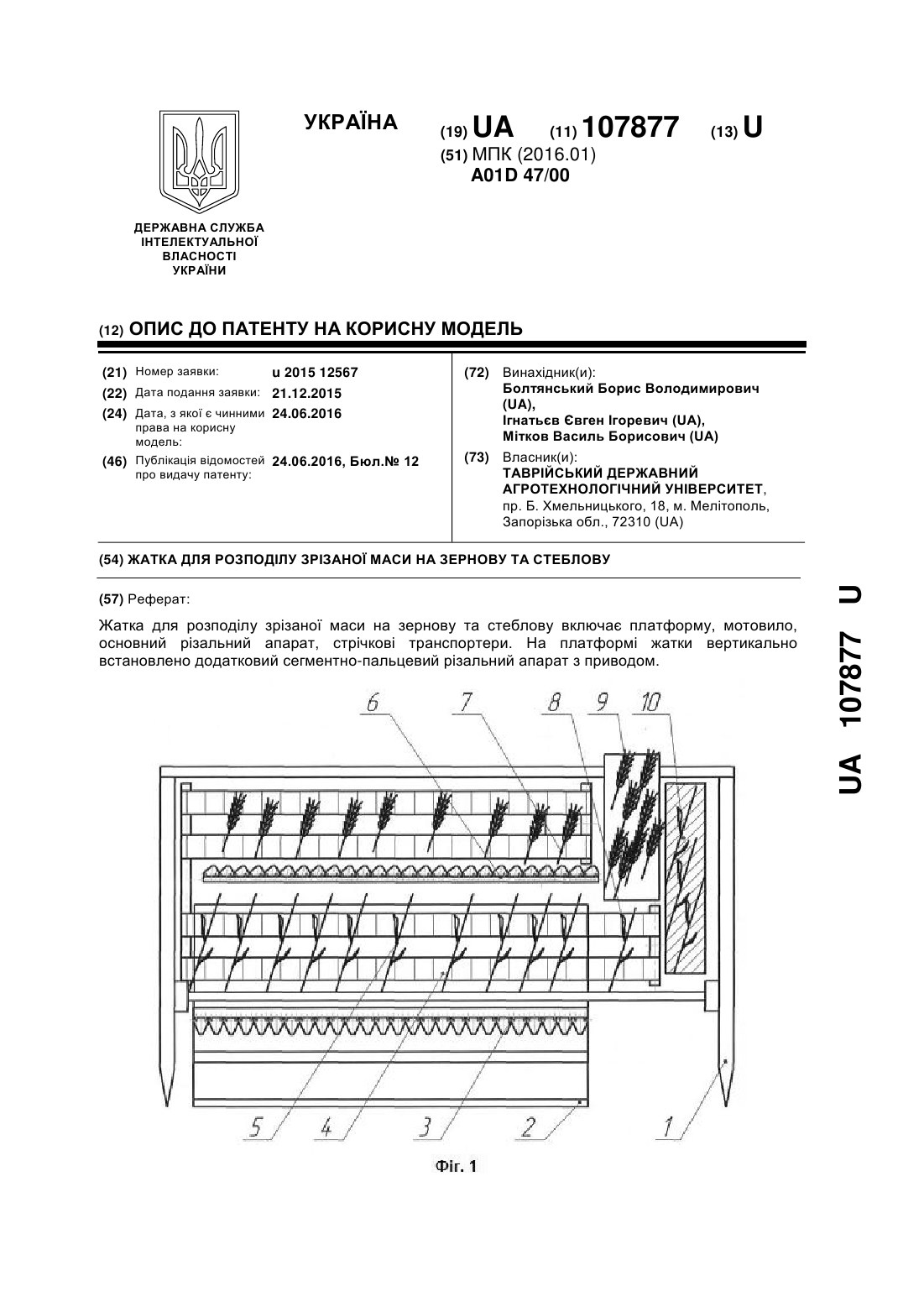
Номер патенту: 107877
Опубліковано: 24.06.2016
Автори: Мітков Василь Борисович, Ігнатьєв Євген Ігоревич, Болтянський Борис Володимирович
МПК: A01D 47/00
Мітки: маси, стеблову, жатка, зрізаної, розподілу, зернову
Формула / Реферат:
Жатка для розподілу зрізаної маси на зернову та стеблову, що включає платформу, мотовило, основний різальний апарат, стрічкові транспортери, яка відрізняється тим, що на платформі жатки вертикально встановлено додатковий сегментно-пальцевий різальний апарат з приводом.
Жатка для розподілу хлібної маси на зернову та стеблову
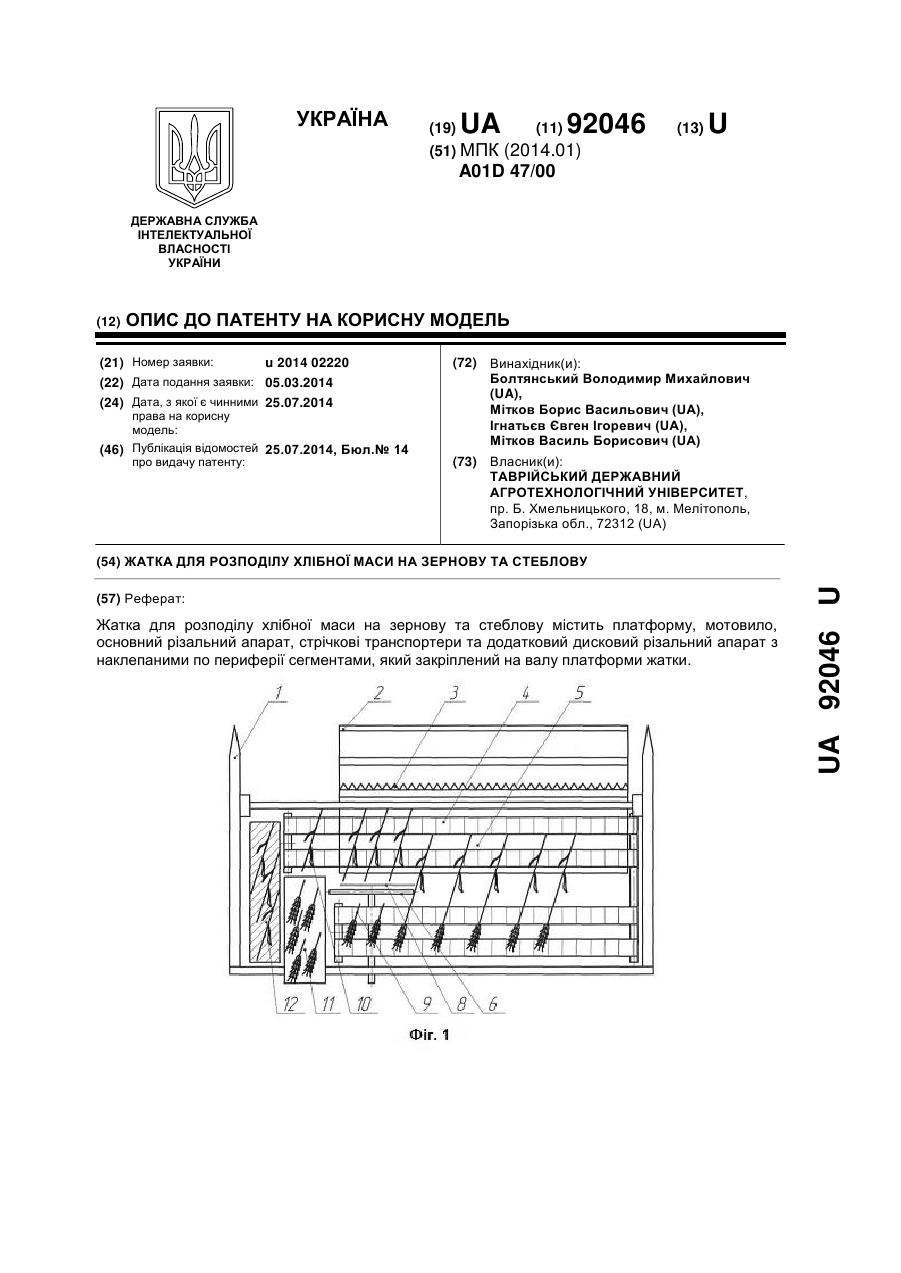
Номер патенту: 92046
Опубліковано: 25.07.2014
Автори: Болтянський Володимир Михайлович, Мітков Борис Васильович, Ігнатьєв Євген Ігоревич, Мітков Василь Борисович
МПК: A01D 47/00
Мітки: стеблову, хлібної, жатка, маси, зернову, розподілу
Формула / Реферат:
Жатка для розподілу хлібної маси на зернову та стеблову, що містить платформу, мотовило, основний різальний апарат, стрічкові транспортери, яка відрізняється тим, що встановлено додатковий дисковий різальний апарат з наклепаними по периферії сегментами, який закріплений на валу платформи жатки.
Система для рівномірного розподілу електричного навантаження в трифазовій або щонайменше однофазовій мережі розподілу енергії (варіанти)
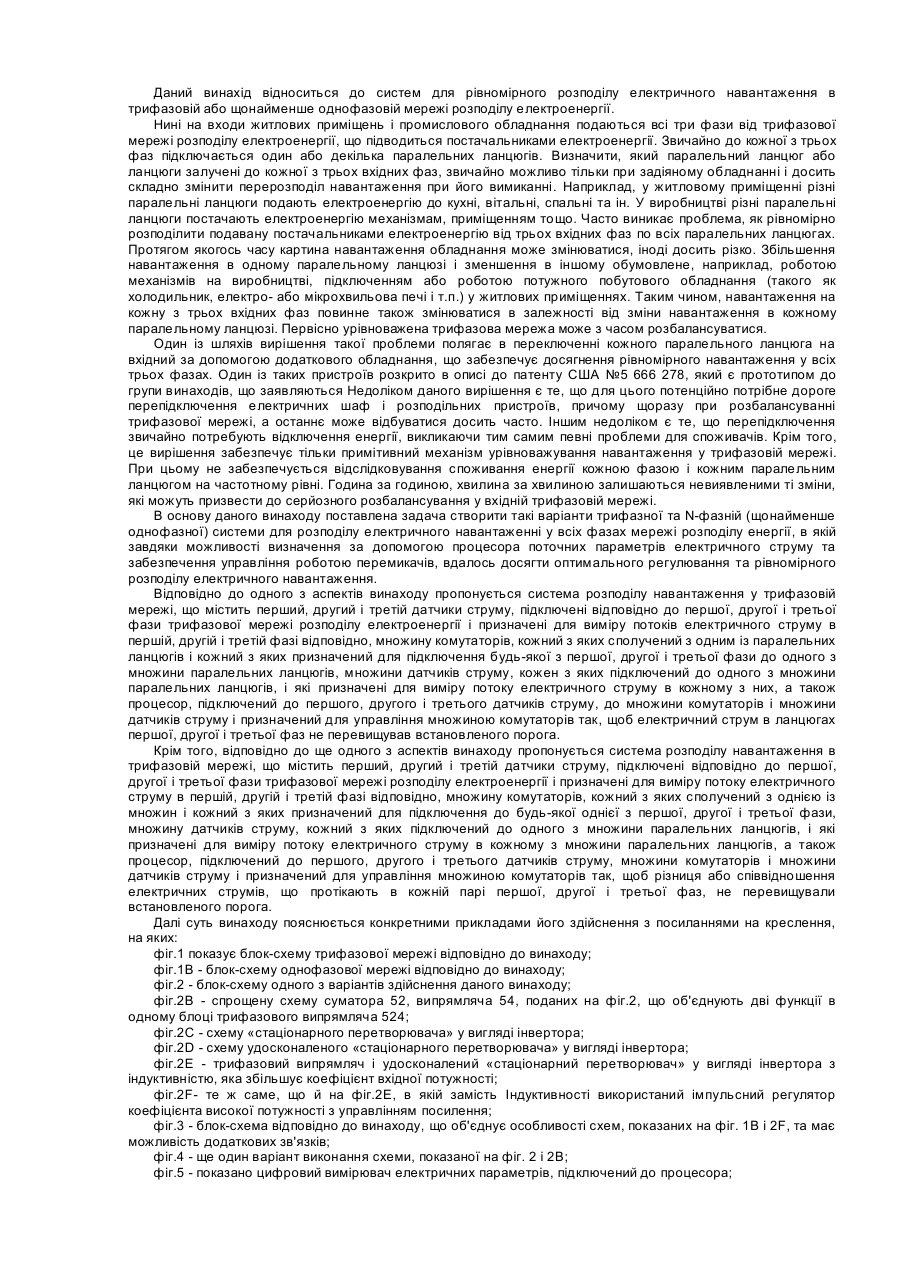
Номер патенту: 66777
Опубліковано: 15.06.2004
Автори: Дейвід Йер, Уіттнер Льюпу
МПК: H02J 1/10
Мітки: однофазовій, енергії, щонайменше, навантаження, трифазовій, розподілу, електричного, система, варіанти, мережі, рівномірного
Формула / Реферат:
1. Трифазова система розподілу навантаження для рівномірного розподілу електричного навантаження, що знаходиться в множині паралельних ланцюгів, у трифазовій мережі розподілу енергії, яка відрізняється тим, що містить:- перший, другий і третій датчики струму, підключені до відповідної першої, другої і третьої фази трифазової мережі розподілу електроенергії і призначені для виміру електричних струмів, що протікають у ланцюзі першої,...
Пристрій для вимірювання маси рідких продуктів в закритих посудинах
Номер патенту: 67972
Опубліковано: 12.03.2012
Автори: Мовчан Віталій Федорович, Катюха Денис Анатолійович, Кувачов Володимир Петрович, Манькова Марина Адольфівна
МПК: G01F 23/20
Мітки: пристрій, рідких, маси, посудинах, вимірювання, закритих, продуктів
Формула / Реферат:
Пристрій для вимірювання маси рідких продуктів в закритих посудинах, що містить основну і допоміжну посудини, ваговимірювальний механізм, вимірювальний прилад, який відрізняється тим, що основна посудина розміщена усередині допоміжної, між стінками котрих закріплені тензометричні датчики для вимірювання ваги, які з'єднані між собою та з пристроєм автоматичного корегування обчислень, який розміщений у вимірювальному приладі.
Попередній патент: Ароматизовані прутки, призначені для використання у аерозолеутворювальних виробах
Наступний патент: Багатоходовий пневмогідророз’єм
Випадковий патент: Формувач одиночної двоімпульсної кодової серії з програмованими часовими параметрами