Спосіб стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах
Номер патенту: 72701
Опубліковано: 27.08.2012
Автори: Тарасов Віктор Олексійович, Гриценко Володимир Ілліч, Зіненко Володимир Миколайович

Формула / Реферат
Спосіб стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах, який включає вимірювання величин зазорів між валом радіальної шпиндельної опори на постійних магнітах і основами датчиків величин зазорів, визначення незміщеного положення осі обертання вала шпиндельної опори на постійних магнітах, формування масивів опорних величин зазорів, вироблення сигналів неузгодження на силові магнітні підвіси, який відрізняється тим, що датчики величин зазорів установлюють по окружності внутрішньої поверхні корпусу радіальної шпиндельної опори на постійних магнітах в перерізах по А-А i В-В опори над магнітами вала шпиндельної опори на постійних магнітах по осях систем координат XAOAYA і XBOBYB по зовнішніх сторонах магнітних силових відштовхувачів, початки яких лежать на осі симетрії внутрішньої поверхні корпуса опори, подають сигнали управління на групи паралельно з'єднаних силових магнітних відштовхувачів, установлених в корпусі опори в перерізах по Б-Б і Г-Г опори над магнітами вала шпиндельної опори на постійних магнітах по осях систем координат XБOБYБ і XГОГYГ, осі яких паралельні між собою і паралельні осям систем координат XAOAYA XBOBYB, і під датчиками величин зазорів, установлених по однойменних осях систем координат XAOAYA і XВOВYВ, установлюють рівні величини зазорів, вісь симетрії вала шпиндельної опори на постійних магнітах суміщують з початками систем координат XAOAYA і XВOВYВ, вісь симетрії вала приймають як геометричну вісь обертання вала опори, розраховують силу відштовхування між групами силових магнітних відштовхувачів, установлених по однойменних осях систем координат XБOБYБ і XГОГYГ, і магнітами вала опори при заданій величині зсуву вала опори по цих осях і розраховують жорсткість радіальної шпиндельної опори на постійних магнітах, розраховують критичні кутові швидкості планшайби і вала опори, вал радіальної шпиндельної опори на постійних магнітах установлюють на кут повороту ![]() , N разів вимірюють величини зазорів під датчиками величин зазорів, установлених по півосях +XA, +YА, +XВ, +YВ систем координат XAOAYA і XВOВYВ і обчислюють їх асимптотично незміщені оцінки, положення геометричної осі обертання вала опори, при якому на куту
, N разів вимірюють величини зазорів під датчиками величин зазорів, установлених по півосях +XA, +YА, +XВ, +YВ систем координат XAOAYA і XВOВYВ і обчислюють їх асимптотично незміщені оцінки, положення геометричної осі обертання вала опори, при якому на куту ![]() повороту вала опори величини зазорів під датчиками величин зазорів рівні виміряним, приймається як незміщене, валу опори задають швидкість обертання
повороту вала опори величини зазорів під датчиками величин зазорів рівні виміряним, приймається як незміщене, валу опори задають швидкість обертання ![]() , яка задовольняє нерівностям
, яка задовольняє нерівностям ![]() і
і ![]() , на куту
, на куту ![]() повороту вала N разів на N обертах вала вимірюють величини зазорів під датчиками величин зазорів, установлених по півосях +ХА, +YA, +ХВ, +YВ систем координат XAOAYA і XВOВYВ і обчислюють їх асимптотично незміщені оцінки, обчислюється величина зсуву геометричної осі обертання вала під дією динамічного навантаження в площині установки датчиків величин зазорів по осях систем координат ХАОАYA і XВОВYВ і розраховуються величини зсуву геометричної осі обертання вала і кути нахилу векторів динамічного навантаження на вал опори до осей XА і XВ систем координатXАOАYА і XВOВYВ, на кутовій швидкості
повороту вала N разів на N обертах вала вимірюють величини зазорів під датчиками величин зазорів, установлених по півосях +ХА, +YA, +ХВ, +YВ систем координат XAOAYA і XВOВYВ і обчислюють їх асимптотично незміщені оцінки, обчислюється величина зсуву геометричної осі обертання вала під дією динамічного навантаження в площині установки датчиків величин зазорів по осях систем координат ХАОАYA і XВОВYВ і розраховуються величини зсуву геометричної осі обертання вала і кути нахилу векторів динамічного навантаження на вал опори до осей XА і XВ систем координатXАOАYА і XВOВYВ, на кутовій швидкості ![]() балансують вал опори і установлюють під датчиками величин зазорів, установлених по півосях +ХА, +YA, +ХВ, +YВ систем координат XAOAYA і XВOВYВ, величини зазорів, які забезпечують мінімум нормі різниць
балансують вал опори і установлюють під датчиками величин зазорів, установлених по півосях +ХА, +YA, +ХВ, +YВ систем координат XAOAYA і XВOВYВ, величини зазорів, які забезпечують мінімум нормі різниць
і наближають геометричну вісь обертання вала до її незміщеного положення або установлюють її в незміщене положення, якщо норма різниць дорівнює нулю, якщо норма різниць не дорівнює нулю з кроком ![]() збільшують кутову швидкість обертання вала опори, на кожному кроці підвищення швидкості обертання балансують вал опори, після балансування вала на к-му кроці підвищення кутової швидкості обертання вала на куту повороту
збільшують кутову швидкість обертання вала опори, на кожному кроці підвищення швидкості обертання балансують вал опори, після балансування вала на к-му кроці підвищення кутової швидкості обертання вала на куту повороту ![]() N разів на N обертах вала вимірюють величини зазорів під датчиками величин зазорів, установлених по півосях +XA, +YA, +XB, +YВ систем координат XAOAYA і ХВОВYВ, і обчислюють норму різниць, якщо норма різниць наближається до нуля, вал радіальної шпиндельної опори на постійних магнітах збалансований з високою точністю, валу опори задають робочу швидкість обертання, на кожному дискретному куту повороту вала опори
N разів на N обертах вала вимірюють величини зазорів під датчиками величин зазорів, установлених по півосях +XA, +YA, +XB, +YВ систем координат XAOAYA і ХВОВYВ, і обчислюють норму різниць, якщо норма різниць наближається до нуля, вал радіальної шпиндельної опори на постійних магнітах збалансований з високою точністю, валу опори задають робочу швидкість обертання, на кожному дискретному куту повороту вала опори ![]() ,
, ![]() ,
, ![]() , …,
, …, ![]() , …,
, …, ![]() N разів на N обертах вала вимірюють величини зазорів під датчиками величин зазорів, установлених по півосях +XA, +YA, +XA, +YB систем координат XAOAYA і XBOBYB, обчислюють їх асимптотично незміщені оцінки і приймають їх як величини опорних зазорів, які відповідають незміщеному положенню осі обертання вала опори, в процесі стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах поточні значення величин зазорів під датчиками величин зазорів, установлених по півосях +XA, +YA, +XB, +YB систем координат XAOAYA і ХBОBYB на дискретах кута повороту вала опори, порівнюються з величинами відповідних опорних зазорів, при відхиленні поточних величин зазорів від опорних виробляються сигнали неузгодження на відповідні групи силових магнітних відштовхувачів, які відповідають величинам відхилення поточних величин зазорів від опорних, чим запобігають відхиленню осі обертання вала шпиндельної опори на постійних магнітах з незміщеного положення,
N разів на N обертах вала вимірюють величини зазорів під датчиками величин зазорів, установлених по півосях +XA, +YA, +XA, +YB систем координат XAOAYA і XBOBYB, обчислюють їх асимптотично незміщені оцінки і приймають їх як величини опорних зазорів, які відповідають незміщеному положенню осі обертання вала опори, в процесі стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах поточні значення величин зазорів під датчиками величин зазорів, установлених по півосях +XA, +YA, +XB, +YB систем координат XAOAYA і ХBОBYB на дискретах кута повороту вала опори, порівнюються з величинами відповідних опорних зазорів, при відхиленні поточних величин зазорів від опорних виробляються сигнали неузгодження на відповідні групи силових магнітних відштовхувачів, які відповідають величинам відхилення поточних величин зазорів від опорних, чим запобігають відхиленню осі обертання вала шпиндельної опори на постійних магнітах з незміщеного положення,
де: ![]() ,
, ![]() ,
, ![]() ,
, ![]() - асимптотично незміщені оцінки величин зазорів під датчиками величин зазорів, установлених по півосях +ХА, +YA, +XB, +YB систем координат XAOAYA і XBOBYB на куту
- асимптотично незміщені оцінки величин зазорів під датчиками величин зазорів, установлених по півосях +ХА, +YA, +XB, +YB систем координат XAOAYA і XBOBYB на куту ![]() повороту вала при
повороту вала при ![]() ;
;
![]() ,
, ![]() ,
, ![]() ,
, ![]() - асимптотично незміщені оцінки величин зазорів під датчиками величин зазорів, установлених по півосях +XA, +YA, +XB, +YB систем координат XAOAYA і XBOHYB на куту
- асимптотично незміщені оцінки величин зазорів під датчиками величин зазорів, установлених по півосях +XA, +YA, +XB, +YB систем координат XAOAYA і XBOHYB на куту ![]() повороту вала при
повороту вала при ![]() .
.
Текст
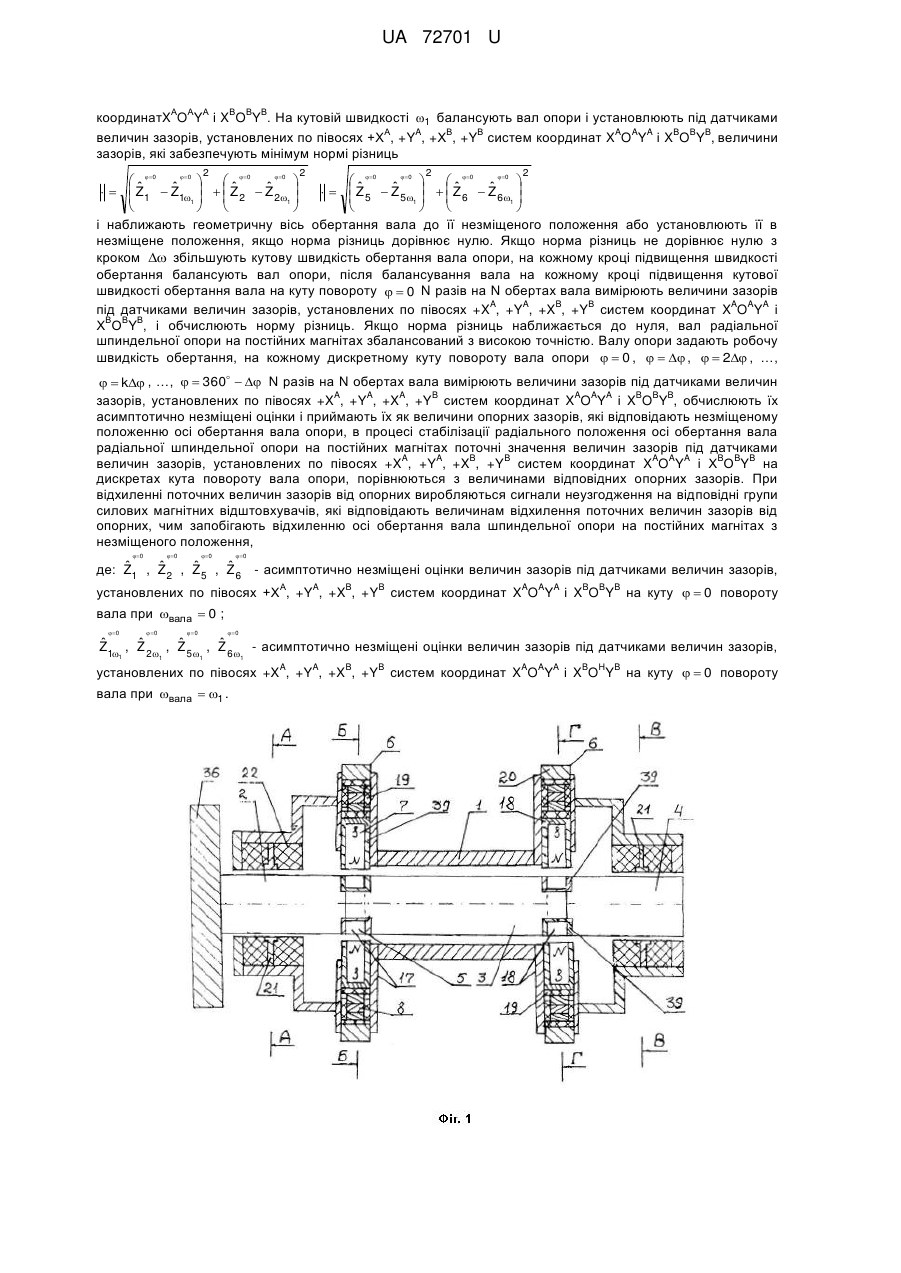
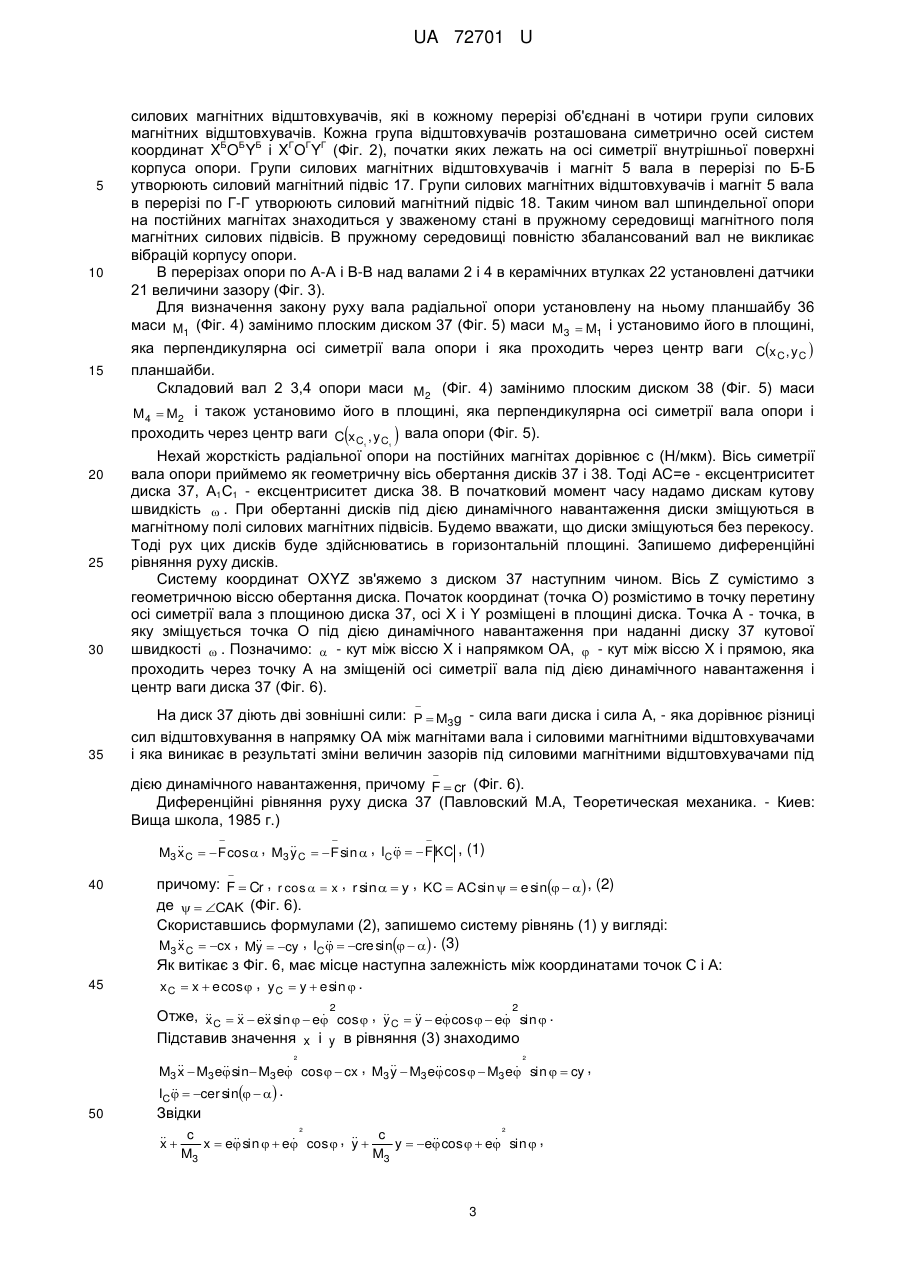
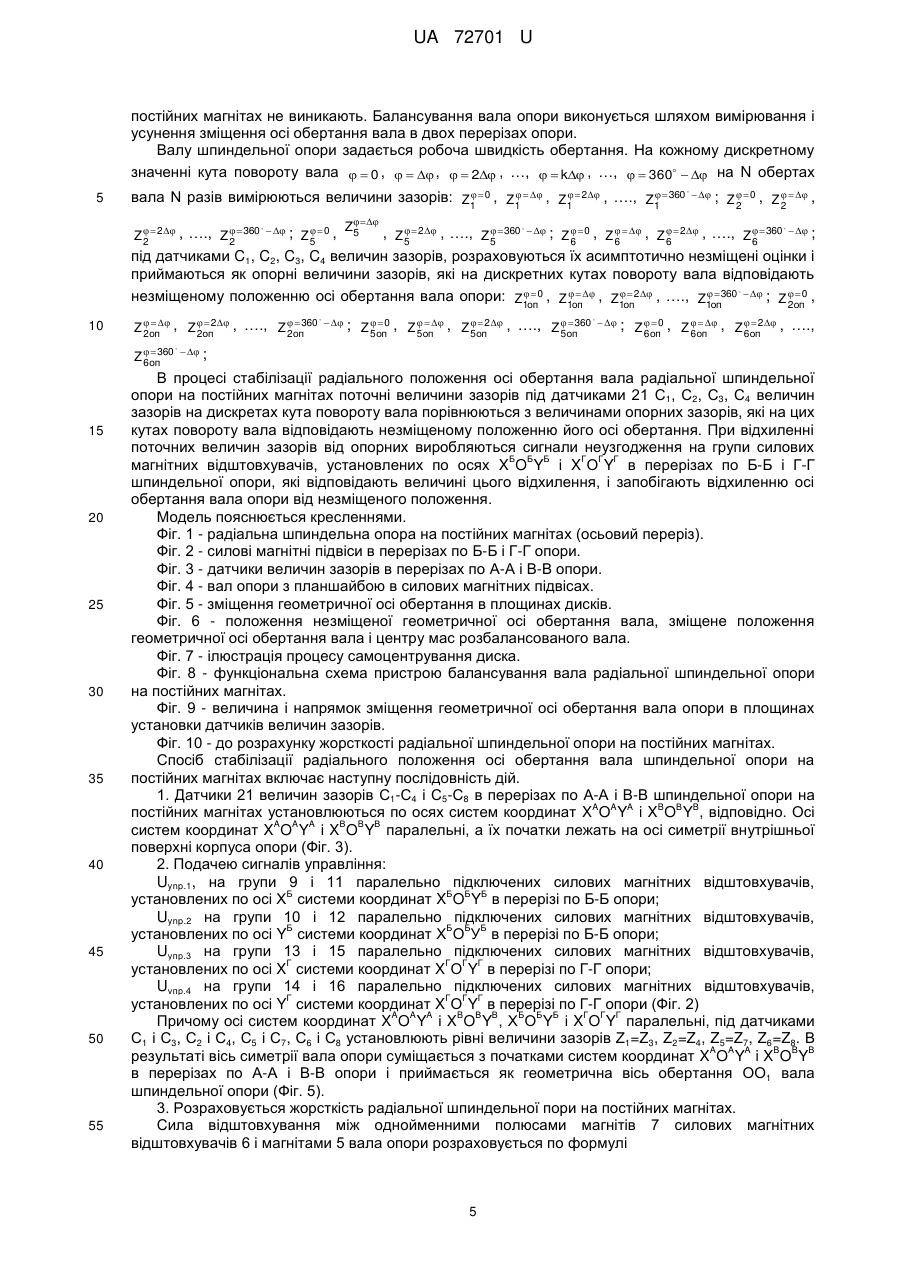
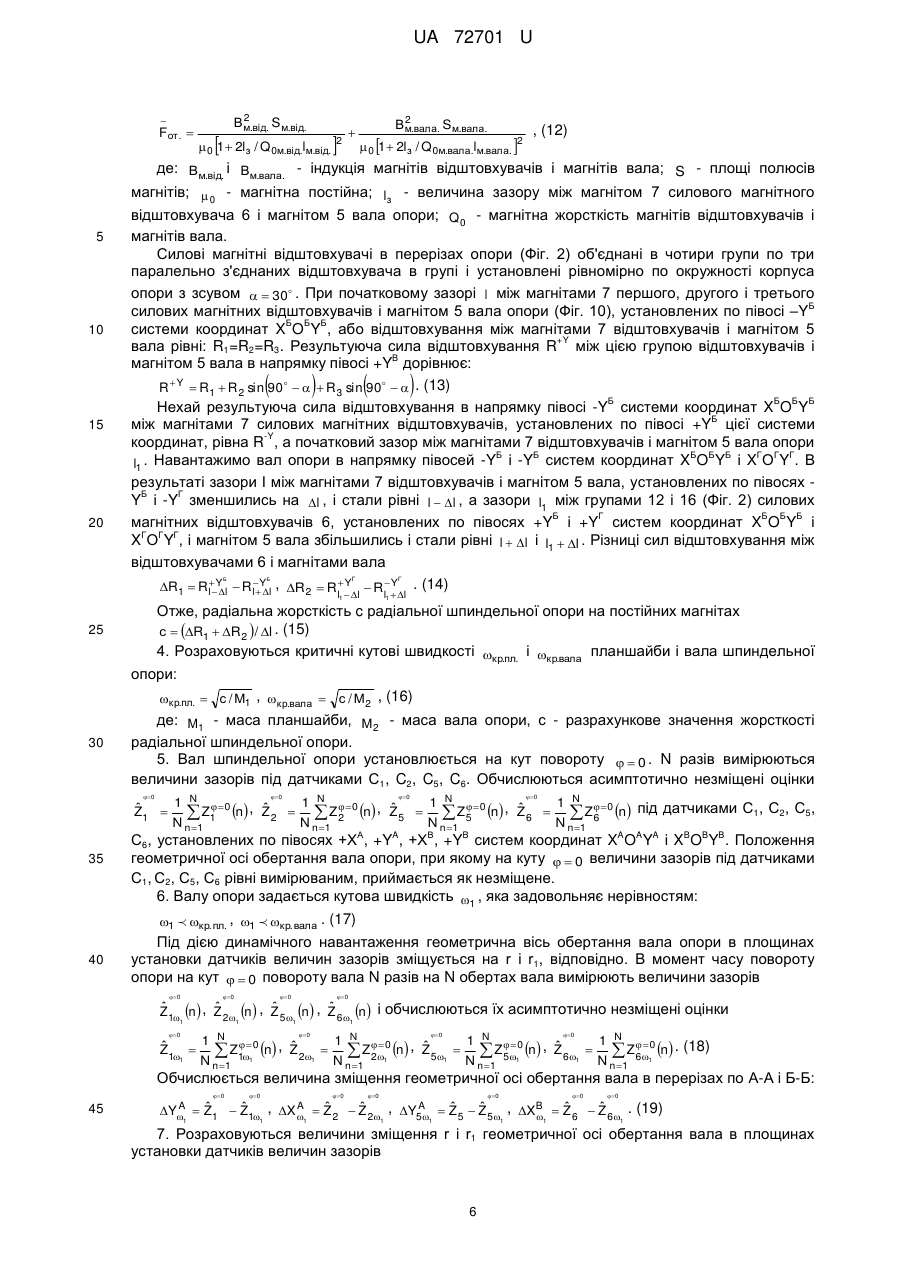
Реферат: Спосіб стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах включає вимірювання величин зазорів між валом радіальної шпиндельної опори на постійних магнітах і основами датчиків величин зазорів, визначення незміщеного положення осі обертання вала шпиндельної опори на постійних магнітах, формування масивів опорних величин зазорів, вироблення сигналів неузгодження на силові магнітні підвіси. Датчики величин зазорів установлюють по окружності внутрішньої поверхні корпусу радіальної шпиндельної опори на постійних магнітах в перерізах по А-А i В-В A A A опори над магнітами вала шпиндельної опори на постійних магнітах по осях систем координат X O Y і B B B X O Y по зовнішніх сторонах магнітних силових відштовхувачів, початки яких лежать на осі симетрії внутрішньої поверхні корпуса опори, подають сигнали управління на групи паралельно з'єднаних силових магнітних відштовхувачів, установлених в корпусі опори в перерізах по Б-Б і Г-Г опори над магнітами вала Б Б Б Г Г Г шпиндельної опори на постійних магнітах по осях систем координат X O Y і X О Y , осі яких паралельні A A A B B B між собою і паралельні осям систем координат X O Y X O Y , і під датчиками величин зазорів, A A A В В В установлених по однойменних осях систем координат X O Y і X O Y , установлюють рівні величини зазорів, вісь симетрії вала шпиндельної опори на постійних магнітах суміщують з початками систем A A A В В В координат X O Y і X O Y , вісь симетрії вала приймають як геометричну вісь обертання вала опори, розраховують силу відштовхування між групами силових магнітних відштовхувачів, установлених по Б Б Б Г Г Г однойменних осях систем координат X O Y і X О Y , і магнітами вала опори при заданій величині зсуву вала опори по цих осях. Розраховують жорсткість радіальної шпиндельної опори на постійних магнітах, розраховують критичні кутові швидкості планшайби і вала опори. Вал радіальної шпиндельної опори на постійних магнітах установлюють на кут повороту 0 , N разів вимірюють величини зазорів під A А В В A A A В В В датчиками величин зазорів, установлених по півосях +X , +Y , +X , +Y систем координат X O Y і X O Y і обчислюють їх асимптотично незміщені оцінки, положення геометричної осі обертання вала опори, при якому на куту 0 повороту вала опори величини зазорів під датчиками величин зазорів рівні виміряним, приймається як незміщене. Валу опори задають швидкість обертання 1 , яка задовольняє нерівностям 1 кр. вала і 1 кр. пл. , на куту 0 повороту вала N разів на N обертах вала вимірюють величини А A В В зазорів під датчиками величин зазорів, установлених по півосях +Х , +Y , +Х , +Y систем координат A A A В В В X O Y і X O Y , і обчислюють їх асимптотично незміщені оцінки. Обчислюється величина зсуву геометричної осі обертання вала під дією динамічного навантаження в площинах установки датчиків А А A В В В величин зазорів по осях систем координат Х О Y і X О Y і розраховуються величини зсуву геометричної А В осі обертання вала і кути нахилу векторів динамічного навантаження на вал опори до осей X і X систем UA 72701 U (12) UA 72701 U А А А В В В координатX O Y і X O Y . На кутовій швидкості 1 балансують вал опори і установлюють під датчиками А A В В A A A В В В величин зазорів, установлених по півосях +Х , +Y , +Х , +Y систем координат X O Y і X O Y , величини зазорів, які забезпечують мінімум нормі різниць 2 2 2 2 ˆ 0 ˆ 0 ˆ 0 ˆ 0 ˆ 0 ˆ 0 ˆ 0 ˆ 0 Z1 Z1 Z 2 Z 2 Z 5 Z 5 Z 6 Z 6 1 1 1 1 і наближають геометричну вісь обертання вала до її незміщеного положення або установлюють її в незміщене положення, якщо норма різниць дорівнює нулю. Якщо норма різниць не дорівнює нулю з кроком збільшують кутову швидкість обертання вала опори, на кожному кроці підвищення швидкості обертання балансують вал опори, після балансування вала на кожному кроці підвищення кутової швидкості обертання вала на куту повороту 0 N разів на N обертах вала вимірюють величини зазорів A A B В A A A під датчиками величин зазорів, установлених по півосях +X , +Y , +X , +Y систем координат X O Y і В В В Х О Y , і обчислюють норму різниць. Якщо норма різниць наближається до нуля, вал радіальної шпиндельної опори на постійних магнітах збалансований з високою точністю. Валу опори задають робочу швидкість обертання, на кожному дискретному куту повороту вала опори 0 , , 2 , …, k , …, 360 N разів на N обертах вала вимірюють величини зазорів під датчиками величин A A AB A A A B B B зазорів, установлених по півосях +X , +Y , +X , +Y систем координат X O Y і X O Y , обчислюють їх асимптотично незміщені оцінки і приймають їх як величини опорних зазорів, які відповідають незміщеному положенню осі обертання вала опори, в процесі стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах поточні значення величин зазорів під датчиками A A B B A A A B B B величин зазорів, установлених по півосях +X , +Y , +X , +Y систем координат X O Y і Х О Y на дискретах кута повороту вала опори, порівнюються з величинами відповідних опорних зазорів. При відхиленні поточних величин зазорів від опорних виробляються сигнали неузгодження на відповідні групи силових магнітних відштовхувачів, які відповідають величинам відхилення поточних величин зазорів від опорних, чим запобігають відхиленню осі обертання вала шпиндельної опори на постійних магнітах з незміщеного положення, 0 0 0 0 ˆ ˆ ˆ ˆ де: Z1 , Z 2 , Z5 , Z 6 - асимптотично незміщені оцінки величин зазорів під датчиками величин зазорів, А установлених по півосях +Х , +Y , +X , +Y систем координат X O Y і X O Y на куту 0 повороту A B B A A A B B B вала при вала 0 ; 0 0 0 0 ˆ ˆ ˆ ˆ Z1 , Z 2 , Z 5 , Z 6 - асимптотично незміщені оцінки величин зазорів під датчиками величин зазорів, 1 1 1 1 установлених по півосях +X , +Y , +X , +Y систем координат X O Y і X O Y на куту 0 повороту A вала при вала 1 . A B B A A A B H B UA 72701 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до верстатобудування і може використовуватись в прецизійних верстатах для обробки точних елементів оптики і механіки. Відомий патент України "Пристрій компенсації радіальних навантажень на вал радіальної аеростатичної опори" № 25727 А від 30.10.98 р., що забезпечує стабілізацію радіального положення осі обертання вала аеростатичної шпиндельної опори при дії радіального навантаження. Цей пристрій вибраний як прототип. Побудова пристрою прототипу основується на способі вимірювання координат радіального положення осі обертових елементів верстатів (патент України № 25726 А від 30.10.1998 р.). Пристрій прототипу забезпечує вимірювання координат радіального положення осі обертання вала в двох перерізах шпиндельної опори, вибір її незміщеного положення і запобігання відхилення радіального положення осі обертання вала опори відносно вибраного незміщеного положення під дією радіального навантаження, тобто стабілізацію радіального положення осі обертання. Для здійснення стабілізації радіального положення осі обертання вала опори: - Визначаються параметри еліпса в двох перерізах вала опори площинами установки датчиків величин зазорів. - Центри еліпсів в перерізах вала опори приймаються як точки, через які проходить вісь обертання. - Визначаються координати датчиків величин зазорів, установлених в двох перерізах шпиндельної опори по осях двох систем координат в кожному перерізі, центри яких суміщені з центрами згаданих еліпсів. - По вимірюванню величин зазорів під датчикам величин зазорів записуються системи рівнянь, які визначають координати осі обертання вала опори, і обчислюються координати осі обертання вала шпиндельної опори. - Визначається незміщене положення осі обертання вала опори. - Формується масив опорних зазорів під датчиками величин зазорів, які на дискретах кута повороту вала опори відповідають незміщеному радіальному положенню осі обертання. - В процесі стабілізації радіального положення осі обертання вала опори поточні величини зазорів під датчиками величин зазорів на дискретах кута повороту вала опори порівнюються з величинами відповідних опорних зазорів. При відхиленні поточних величин зазорів від опорних виробляються сигнали неузгодження, які відповідають величині відхиленню поточних величин зазорів від опорних, на компенсатори радіального зміщення осі обертання, чим запобігається зміщення осі обертання з високою точністю. Задача, що вирішується, полягає в розробці способу стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах, який основується на здатності вала радіальної шпиндельної опори самостійно центруватися в пружному середовищі магнітного поля силових магнітних підвісів цієї опори і інваріантний до форми перерізу вала радіальної шпиндельної опори. Це досягається тим, що в способі стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах, який включає вимірювання величин зазорів між валом радіальної шпиндельної опори на постійних магнітах і основами датчиків величин зазорів, визначення незміщеного положення осі обертання вала шпиндельної опори на постійних магнітах, формування масивів опорних величин зазорів, вироблення сигналів неузгодження на силові магнітні підвіси, згідно з корисною моделлю, датчики величин зазорів установлюють по окружності внутрішньої поверхні корпусу радіальної шпиндельної опори на A A A B В В постійних магнітах в перерізах по А-А і В-В опори по осях систем координат X O Y і X O Y по зовнішніх сторонах магнітних силових відштовхувачів, початки яких лежать на осі симетрії внутрішньої поверхні корпусу опори, подають сигнали управління на групи паралельно з'єднаних силових магнітних відштовхувачів, установлених в корпусі опори в перерізах по Б-Б і Г-Г опори над магнітами вала шпиндельної опори на постійних магнітах по осях систем Б Б Б Г Г Г координат X O Y і X О Y , осі яких паралельні між собою і паралельні осям систем координат A A A В В В X O Y і X O Y , під датчиками величин зазорів, установлених по однойменних осях систем A A A В В В координат X O Y і X O Y , установлюють рівні величини зазорів і вісь симетрії вала A A A шпиндельної опори на постійних магнітах суміщують з початками систем координат X O Y і В В В X O Y , вісь симетрії вала приймають як геометричну вісь обертання вала опори, розраховують силу відштовхування між групами силових магнітних відштовхувачів, установлених по В В В Г Г Г однойменних осях систем координат X O Y і X О Y , і магнітами вала опори при заданій величині зсуву вала опори по цих осях і розраховують жорсткість радіальної шпиндельної опори на постійних магнітах, розраховують критичні кутові швидкості планшайби і вала опори, вал радіальної шпиндельної опори на постійних магнітах установлюють на кут повороту 0 , N A разів вимірюють величини зазорів під датчиками величин зазорів, установлених по півосях +X , 1 UA 72701 U В A 5 B A A В A В В +Y , +X , +Y систем координат X O Y і X O Y і обчислюють їх асимптотично незміщені оцінки, положення геометричної осі обертання вала опори, при якому на куту 0 повороту вала опори величини зазорів під датчиками величин зазорів рівні виміряним, приймається як незміщене, валу опори задають швидкість обертання 1 , яка задовольняє нерівностям 1 кр. вала і 1 кр. пл. , на куту 0 повороту вала N разів на N обертах вала вимірюють А A 10 2 15 20 25 В В величини зазорів під датчиками величин зазорів, установлених по півосях +X , +Y , +X , +Y A A A В В В систем координат X O Y і X O Y і обчислюють їх асимптотично незміщені оцінки, обчислюється величина зсуву геометричної осі обертання вала під дією динамічного навантаження в площинах установки датчиків величин зазорів по осях систем координат A A A В В В X O Y і Х О Y і розраховуються величини зсуву геометричної осі обертання вала і кути А Б нахилу векторів динамічного навантаження на вал опори до осей X і Х систем координат А А А В В В X О Y і X O Y , на кутовій швидкості 1 балансують вал опори і установлюють під датчиками A A В В A A A B B B величин зазорів, установлених по півосях +X , +Y , +X , +Y систем координат X O Y і Х О Y , величини зазорів, які забезпечують мінімум нормам різниць ˆ 0 ˆ 0 ˆ 0 ˆ 0 Z1 Z1 Z 2 Z 2 1 1 2 2 ˆ 0 ˆ 0 ˆ 0 ˆ 0 1 Z 5 Z 5 Z 6 Z 6 1 1 2 і наближають геометричну ось обертання вала до її незміщеного положення або установлюють її в незміщене положення, якщо норма різниць дорівнює нулю, якщо норма різниць не дорівнює нулю з кроком збільшують кутову швидкість обертання вала опори, на кожному кроці підвищення швидкості обертання балансують вал опори, після балансування вала на к-му кроці підвищення кутової швидкості обертання вала на куту повороту 0 N разів на N обертах вала вимірюють величини зазорів під датчиками величин зазорів, установлених по A A B B A A A B B B півосях +X , +Y , +X , +Y систем координат X O Y і X О Y , і обчислюють норму різниць, якщо норма різниць наближається до нуля, вал радіальної шпиндельної опори на постійних магнітах збалансований з високою точністю, валу опори задають робочу швидкість обертання, на кожному дискретному куту повороту вала опори 0 , , 2 , …, k , …, 360 N разів на N обертах вала вимірюють величини зазорів під датчиками величин А 30 35 0 0 0 0 ˆ ˆ ˆ ˆ де: Z1 , Z 2 , Z 5 , Z 6 40 0 1 50 B B A A A B B B - асимптотично незміщені оцінки величин зазорів під датчиками A A В В A A A В В В величин зазорів, установлених по півосях +X , +Y , +X , +Y систем координат X O Y і X O Y на куту 0 повороту вала при вала 0 ; 0 0 0 ˆ ˆ ˆ ˆ Z1 , Z 2 , Z 5 , Z 6 45 A зазорів, установлених по півосях +Х , +Y , +X , +Y систем координат X O Y і X O Y , обчислюють їх асимптотично незміщені оцінки і приймають їх як величини опорних зазорів, які відповідають незміщеному положенню осі обертання вала опори, в процесі стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах A поточні значення величин зазорів під датчиками величин зазорів, установлених по півосях +X , A B B A A A B B B +Y , +X , +Y систем координат X O Y і X О Y на дискретах кута повороту вала опори порівнюються з величинами відповідних опорних зазорів, при відхиленні поточних величин зазорів від опорних виробляються сигнали неузгодження на відповідні групи силових магнітних відштовхувачів, які відповідають величинам відхилення поточних величин зазорів від опорних, чим запобігають відхиленню осі обертання вала шпиндельної опори на постійних магнітах з незміщеного положення, 1 1 1 - асимптотично незміщені оцінки величин зазорів під датчиками A A В В A A A В В В величин зазорів, установлених по півосях +X , +Y , +X , +Y систем координат X O Y і Х О Y на куту 0 повороту вала при вала 1 . Причинно-наслідковий зв'язок технічного рішення, що заявляється, з технічним результатом, що досягається, полягає у наступному. На Фіг. 1 показана радіальна шпиндельна опора на постійних магнітах. В корпусі 1 опори установлений складовий вал, який складається з трьох співвісно установлених валів 2, 3, 4 одного діаметра. По краях валу 3 в перерізах по Б-Б і Г-Г опори установлені магніти 5 вала. В Б Б Б Г Г Г цих же перерізах опори над магнітами 5 вала по осях систем координат X O Y і X О Y установлені силові магнітні відштовхувачі 6, кожен з яких включає магніт 7 відштовхувача, який для установлення величини зазору між магнітами силових магнітних відштовхувачів і магнітами 5 вала переміщуються п'єзоелектричними двигунами 8. В цих же перерізах по Б-Б і Г-Г по осях Б Б Бi Г Г Г систем координатX O Y і X О Y опори рівномірно по окружності установлено по дванадцять 2 UA 72701 U 5 10 15 силових магнітних відштовхувачів, які в кожному перерізі об'єднані в чотири групи силових магнітних відштовхувачів. Кожна група відштовхувачів розташована симетрично осей систем Б Б Б Г Г Г координат X O Y і X О Y (Фіг. 2), початки яких лежать на осі симетрії внутрішньої поверхні корпуса опори. Групи силових магнітних відштовхувачів і магніт 5 вала в перерізі по Б-Б утворюють силовий магнітний підвіс 17. Групи силових магнітних відштовхувачів і магніт 5 вала в перерізі по Г-Г утворюють силовий магнітний підвіс 18. Таким чином вал шпиндельної опори на постійних магнітах знаходиться у зваженому стані в пружному середовищі магнітного поля магнітних силових підвісів. В пружному середовищі повністю збалансований вал не викликає вібрацій корпусу опори. В перерізах опори по А-А і В-В над валами 2 і 4 в керамічних втулках 22 установлені датчики 21 величини зазору (Фіг. 3). Для визначення закону руху вала радіальної опори установлену на ньому планшайбу 36 маси M1 (Фіг. 4) замінимо плоским диском 37 (Фіг. 5) маси M3 M1 і установимо його в площині, яка перпендикулярна осі симетрії вала опори і яка проходить через центр ваги Cx C , y C планшайби. Складовий вал 2 3,4 опори маси M2 (Фіг. 4) замінимо плоским диском 38 (Фіг. 5) маси M4 M2 і також установимо його в площині, яка перпендикулярна осі симетрії вала опори і проходить через центр ваги Cx C , y C вала опори (Фіг. 5). Нехай жорсткість радіальної опори на постійних магнітах дорівнює с (Н/мкм). Вісь симетрії вала опори приймемо як геометричну вісь обертання дисків 37 і 38. Тоді АС=е - ексцентриситет диска 37, А1С1 - ексцентриситет диска 38. В початковий момент часу надамо дискам кутову швидкість . При обертанні дисків під дією динамічного навантаження диски зміщуються в магнітному полі силових магнітних підвісів. Будемо вважати, що диски зміщуються без перекосу. Тоді рух цих дисків буде здійснюватись в горизонтальній площині. Запишемо диференційні рівняння руху дисків. Систему координат OXYZ зв'яжемо з диском 37 наступним чином. Вісь Z сумістимо з геометричною віссю обертання диска. Початок координат (точка О) розмістимо в точку перетину осі симетрії вала з площиною диска 37, осі Х і Y розміщені в площині диска. Точка A - точка, в яку зміщується точка О під дією динамічного навантаження при наданні диску 37 кутової швидкості . Позначимо: - кут між віссю X і напрямком ОА, - кут між віссю X і прямою, яка проходить через точку А на зміщеній осі симетрії вала під дією динамічного навантаження і центр ваги диска 37 (Фіг. 6). 1 20 25 30 1 35 На диск 37 діють дві зовнішні сили: P M3 g - сила ваги диска і сила А, - яка дорівнює різниці сил відштовхування в напрямку ОА між магнітами вала і силовими магнітними відштовхувачами і яка виникає в результаті зміни величин зазорів під силовими магнітними відштовхувачами під дією динамічного навантаження, причому F cr (Фіг. 6). Диференційні рівняння руху диска 37 (Павловский М.А, Теоретическая механика. - Киев: Вища школа, 1985 г.) M3 C F cos , M3 C F sin , IC F KC , (1) x y 40 45 причому: F Cr , r cos x , r sin y , KC AC sin e sin , (2) де CAK (Фіг. 6). Скориставшись формулами (2), запишемо систему рівнянь (1) у вигляді: M3 C cx , M cy , IC cre sin . (3) x y Як витікає з Фіг. 6, має місце наступна залежність між координатами точок С і А: x C x e cos , y C y e sin . 2 2 Отже, C e sin e cos , C e cos e sin . x x x y y Підставив значення x і y в рівняння (3) знаходимо 2 2 M3 M3 e sin M3 e cos cx , M3 M3 e cos M3 e sin cy , x y IC cer sin . 50 Звідки 2 2 c x e sin e cos , c y e cos e sin , x y M3 M3 3 UA 72701 U ceg r sin . (4) IC 5 10 Система рівнянь (4) вирішується приблизно. В правій частині третього рівняння стоїть добуток e sin . Вважаємо, що цей утвір малий. Тепер третє рівняння системи (4) приймає вигляд 0 . Приймаючи до уваги початкові умови руху; при t 0 , 0 , , знаходимо i t , (5) тобто обертання диска 37 здійснюється рівномірно. Використовуючи формулу (5), запишемо два перших рівняння системи (4) у вигляді k 2 x h cos t , k 2 y h sin t , (6) y x де: c / cM3 k 2 ; e2 h . Результат рішення системи (6): e2 x k 2 2 cos t , y e2 k 2 2 sin t , (7) тобто точка A здійснює гармонічні коливання з круговою частотою і амплітудою Після піднесення кожної з формул (7) в квадрат і підсумовування знаходимо 15 x2 y2 k e 24 2 2 2 e 2 2 k 2 . . Так як величина зміщення осі обертання вала r 2 x 2 y 2 , знаходимо r e2 k 2 2 . (8) Обчислимо зміщення центра ваги С диска 37 від точки О. OC r e . Тоді OC 20 ek 2 2 k 2 ; (9) При малій кутовій швидкості обертання диска 37, тобто при k , на основі формул (8) і (9) отримуємо OC r 0 (Фіг. 6). При великій кутовій швидкості обертання диска 37, тобто при k , r OC 0 , що відповідає Фіг. 7. 25 При збільшенні кутової швидкості ω диска відстань ОС (див. 9) по модулю зменшується, тобто диск 37 в пружному (магнітному полі силових магнітних підвісів) самостійно центрується (при OC 0 ), і його центр ваги необмежено наближається до геометричної осі обертання. Перепишемо формулу (11) у вигляді OC e 30 k2 . Якщо кутова швидкість диска 35 значно k 2 2 більше його кругової частоти власних коливань, то OC / e - мала величина. В випадку k має місце явище резонансу і відстань ОС необмежено зростає. В дійсності ОС обмежено силами опору руху. Резонансна кутова швидкість обертання диска 37, при якій його зміщення в магнітному полі досягає максимального значення є критичною кутовою швидкістю обертання, а відповідне число обертів диска за хвилину - критичним числом обертів. Так як при резонансі кр к , a k c / M3 , то кр c / M3 . Отже nкр.37 35 Всі наведені розрахункові співвідношення визначають також закон руху диска 38. Формули (8), (9), (10) приймають вигляд: r1 40 30 30 кр.37 с / М3 . (10) e1k 2 e12 ; ; nкр.38 30 кр.38 30 с / М4 . (11) OC1 2 2 2 2 k k1 Якщо в процесі балансування центри ваги дисків переміщуються на геометричну вісь обертання, то навіть на кутових швидкостях обертання вала об. , близьких до критичних, величина зміщення осі обертання вала r 0 , а вібрації корпуса шпиндельної опори на 4 UA 72701 U постійних магнітах не виникають. Балансування вала опори виконується шляхом вимірювання і усунення зміщення осі обертання вала в двох перерізах опори. Валу шпиндельної опори задається робоча швидкість обертання. На кожному дискретному значенні кута повороту вала 0 , , 2 , …, k , …, 360 на N обертах 5 вала N разів вимірюються величини зазорів: Z1 0 , Z1 , Z1 2 , …., Z1 360 Z 2 , …., Z 360 2 2 Z5 ; Z 0 , Z , 2 2 , Z 5 2 , …., Z 5 360 ; Z 0 , Z , Z 2 , …., Z 360 ; 6 6 6 6 під датчиками C1, C2, C3, C4 величин зазорів, розраховуються їх асимптотично незміщені оцінки і приймаються як опорні величини зазорів, які на дискретних кутах повороту вала відповідають ; Z5 0 , незміщеному положенню осі обертання вала опори: Z1оп0 , Z1оп , Z1оп2 , …., Z1оп360 10 360 2 Z оп , Z оп , …., Z оп 2 2 2 360 Z оп 6 15 20 25 30 35 40 45 50 55 ; 360 0 2 Z 5оп , Z 5оп , Z 5оп , …., Z 5оп ; ; 0 Z оп , 2 0 2 Z оп , Z оп , Z оп , …., 6 6 6 ; В процесі стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах поточні величини зазорів під датчиками 21 С1, С2, С3, С4 величин зазорів на дискретах кута повороту вала порівнюються з величинами опорних зазорів, які на цих кутах повороту вала відповідають незміщеному положенню його осі обертання. При відхиленні поточних величин зазорів від опорних виробляються сигнали неузгодження на групи силових Б Б Б Г Г Г магнітних відштовхувачів, установлених по осях X O Y і X О Y в перерізах по Б-Б і Г-Г шпиндельної опори, які відповідають величині цього відхилення, і запобігають відхиленню осі обертання вала опори від незміщеного положення. Модель пояснюється кресленнями. Фіг. 1 - радіальна шпиндельна опора на постійних магнітах (осьовий переріз). Фіг. 2 - силові магнітні підвіси в перерізах по Б-Б і Г-Г опори. Фіг. 3 - датчики величин зазорів в перерізах по А-А і В-В опори. Фіг. 4 - вал опори з планшайбою в силових магнітних підвісах. Фіг. 5 - зміщення геометричної осі обертання в площинах дисків. Фіг. 6 - положення незміщеної геометричної осі обертання вала, зміщене положення геометричної осі обертання вала і центру мас розбалансованого вала. Фіг. 7 - ілюстрація процесу самоцентрування диска. Фіг. 8 - функціональна схема пристрою балансування вала радіальної шпиндельної опори на постійних магнітах. Фіг. 9 - величина і напрямок зміщення геометричної осі обертання вала опори в площинах установки датчиків величин зазорів. Фіг. 10 - до розрахунку жорсткості радіальної шпиндельної опори на постійних магнітах. Спосіб стабілізації радіального положення осі обертання вала шпиндельної опори на постійних магнітах включає наступну послідовність дій. 1. Датчики 21 величин зазорів С1-С4 і С5-С8 в перерізах по А-А і В-В шпиндельної опори на A A A B В B постійних магнітах установлюються по осях систем координат X O Y i X O Y , відповідно. Осі A A A В B В систем координат X O Y і X O Y паралельні, а їх початки лежать на осі симетрії внутрішньої поверхні корпуса опори (Фіг. 3). 2. Подачею сигналів управління: Uynp.1, на групи 9 і 11 паралельно підключених силових магнітних відштовхувачів, Б Б Б Б установлених по осі Х системи координат X O Y в перерізі по Б-Б опори; Uynp.2 на групи 10 і 12 паралельно підключених силових магнітних відштовхувачів, Б Б Б Б установлених по осі Y системи координат Х О У в перерізі по Б-Б опори; Uупр.3 на групи 13 і 15 паралельно підключених силових магнітних відштовхувачів, Г Г Г Г установлених по осі X системи координат X О Y в перерізі по Г-Г опори; Uvпp.4 на групи 14 і 16 паралельно підключених силових магнітних відштовхувачів, Г Г Г Г установлених по осі Y системи координат X О Y в перерізі по Г-Г опори (Фіг. 2) A A A B В В Б Б Б Г Г Г Причому осі систем координат X O Y і X O Y , Х О Y і X O Y паралельні, під датчиками С1 і С3, С2 і С4, С5 і С7, С6 і C8 установлюють рівні величини зазорів Z1=Z3, Z2=Z4, Z5=Z7, Z6=Z8. В A A A B B B результаті вісь симетрії вала опори суміщається з початками систем координат X O Y i X O Y в перерізах по А-А і В-В опори і приймається як геометрична вісь обертання ОО1 вала шпиндельної опори (Фіг. 5). 3. Розраховується жорсткість радіальної шпиндельної пори на постійних магнітах. Сила відштовхування між однойменними полюсами магнітів 7 силових магнітних відштовхувачів 6 і магнітами 5 вала опори розраховується по формулі 5 UA 72701 U 2 В м.від. S м.від. F от . 0 1 2l з / Q 0м.від.lм.від. 2 2 В м.вала. S м.вала. 0 1 2l з / Q 0м.вала.lм.вала. 2 , (12) де: Вм.від. і Вм.вала. - індукція магнітів відштовхувачів і магнітів вала; S - площі полюсів магнітів; 0 - магнітна постійна; lз - величина зазору між магнітом 7 силового магнітного 5 10 відштовхувача 6 і магнітом 5 вала опори; Q 0 - магнітна жорсткість магнітів відштовхувачів і магнітів вала. Силові магнітні відштовхувачі в перерізах опори (Фіг. 2) об'єднані в чотири групи по три паралельно з'єднаних відштовхувача в групі і установлені рівномірно по окружності корпуса опори з зсувом 30 . При початковому зазорі l між магнітами 7 першого, другого і третього Б силових магнітних відштовхувачів і магнітом 5 вала опори (Фіг. 10), установлених по півосі –Y Б Б Б системи координат X O Y , або відштовхування між магнітами 7 відштовхувачів і магнітом 5 +Y вала рівні: R1=R2=R3. Результуюча сила відштовхування R між цією групою відштовхувачів і B магнітом 5 вала в напрямку півосі +Y дорівнює: R Y R1 R 2 sin 90 R 3 sin 90 . (13) Б Б Б Б Нехай результуюча сила відштовхування в напрямку півосі -Y системи координат X O Y Б між магнітами 7 силових магнітних відштовхувачів, установлених по півосі +Y цієї системи -Y координат, рівна R , а початковий зазор між магнітами 7 відштовхувачів і магнітом 5 вала опори Б Б Б Б Б Г Г Г l1 . Навантажимо вал опори в напрямку півосей -Y і -Y систем координат X O Y і X О Y . В результаті зазори I між магнітами 7 відштовхувачів і магнітом 5 вала, установлених по півосях Б Г Y і -Y зменшились на l , і стали рівні l l , а зазори l1 між групами 12 і 16 (Фіг. 2) силових Б Г Б Б Б магнітних відштовхувачів 6, установлених по півосях +Y і +Y систем координат X O Y і Г Г Г X О Y , і магнітом 5 вала збільшились і стали рівні l l і l1 l . Різниці сил відштовхування між відштовхувачами 6 і магнітами вала 15 20 Y Y R1 R l Y l R l Y l , R2 Rl l Rl l . (14) 1 1 Б Б Г Г Отже, радіальна жорсткість c радіальної шпиндельної опори на постійних магнітах с R1 R2 / l . (15) 4. Розраховуються критичні кутові швидкості кр.пл. і кр.вала планшайби і вала шпиндельної 25 опори: кр.пл. с / М1 , кр.вала с / М2 , (16) 30 де: М1 - маса планшайби, М2 - маса вала опори, c - разрахункове значення жорсткості радіальної шпиндельної опори. 5. Вал шпиндельної опори установлюється на кут повороту 0 . N разів вимірюються величини зазорів під датчиками C1, C2, C5, C6. Обчислюються асимптотично незміщені оцінки 0 0 0 0 1 N 1 N 1 N 1 N ˆ ˆ ˆ ˆ Z1 Z1 0 n , Z 2 Z 0 n , Z5 Z5 0 n , Z 6 Z 0 n під датчиками С1, С2, С5, 2 N n 1 N n 1 N n 1 N n 1 6 А 35 40 A В B A A A B B B С6, установлених по півосях +Х , +Y , +Х , +Y систем координат X O Y і X O Y . Положення геометричної осі обертання вала опори, при якому на куту 0 величини зазорів під датчиками С1, С2, С5, С6 рівні вимірюваним, приймається як незміщене. 6. Валу опори задається кутова швидкість 1 , яка задовольняє нерівностям: 1 кр. пл. , 1 кр. вала . (17) Під дією динамічного навантаження геометрична вісь обертання вала опори в площинах установки датчиків величин зазорів зміщується на r і r1, відповідно. В момент часу повороту опори на кут 0 повороту вала N разів на N обертах вала вимірюють величини зазорів 0 0 0 0 ˆ ˆ ˆ ˆ Z1 n , Z 2 n , Z 5 n , Z 6 n і обчислюються їх асимптотично незміщені оцінки 1 1 0 1 1 0 ˆ Z1 1 0 0 1 N 1 N 1 N 1 N ˆ ˆ ˆ Z1 0 n , Z 2 Z 0 n , Z 5 Z 50 n , Z 6 Z 0 n . (18) 2 1 1 1 1 1 1 N n 1 N n 1 N n 1 N n 1 6 1 Обчислюється величина зміщення геометричної осі обертання вала в перерізах по А-А і Б-Б: 0 45 0 0 0 0 0 0 A A A ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ Y Z1 Z1 , X Z 2 Z 2 , Y5 Z 5 Z 5 , XB Z 6 Z 6 . (19) 1 1 1 1 1 1 1 1 7. Розраховуються величини зміщення r і r1 геометричної осі обертання вала в площинах установки датчиків величин зазорів 6 UA 72701 U X Y A 2 1 r A 2 1 X Y B 2 1 , r1 B 2 1 (20) А В А А A В В В і кути нахилу динамічного навантаження до осей Х , X систем координат X О Y і Х О Y (Фіг. 10): arcsin A Y 1 A X B Y , 1 arcsin 1 XB 1 . (21) 1 8. На кутовій швидкості 1 обертання вала опори балансують вал відомим способом, 5 0 ˆ наприклад свердлінням, і установлюють під датчиками 21 С1, С2, С5, С6 величини зазорів Z , 1 1 0 0 0 ˆ ˆ ˆ Z 2 , Z 5 , Z 6 , які забезпечують мінімум нормі різниць 1 1 1 2 ˆ 0 ˆ 0 ˆ 0 ˆ 0 Z1 Z1 Z 2 Z 2 1 1 10 2 2 ˆ 0 ˆ 0 ˆ 0 ˆ 0 1 Z 5 Z 5 Z 6 Z 6 1 1 2 . (22) В результаті геометрична вісь обертання вала опори на кутовій швидкості 1 буде установлена в незміщене положення або наблизиться до нього. 9. З кроком послідовно підвищують кутову швидкість обертання вала опори: 1 , 1 2 , 1 3 ,…, 1 k ,…, кр. , 15 де кр. - кутова швидкість обертання вала опори в -оточенні критичної швидкості обертання. На кожній дискреті кутової швидкості обертання вала шпиндельної опори виконують п. 6, п. 7, п. 8 і балансують вал опори. Після виконання балансування на к-му кроці підвищення кутової швидкості в моменти часу повороту вала на кут 0 N разів на N поворотах вала вимірюють величини зазорів під датчиками 21 С1, С2, С5, С6. Обчислюють їх асимптотично незміщені оцінки 0 0 0 0 ˆ ˆ ˆ ˆ Z 1 , Z 2 , Z 5 , Z 6 і перевіряють виконання рівностей 1 1 1 0 20 0 1 0 25 0 0 0 0 0 ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ Z1 Z1 , Z 2 Z 2 , Z 5 Z 5 , Z 6 Z 6 . (23) Якщо хоча б одна з рівностей (23) не виконується, вал опори не відцентрований. Обчислюють величини зміщення r і r1 геометричної осі обертання вала в площинах установки датчиків величин зазорів у відповідності з (20) і кути нахилу векторів динамічного навантаження А В A A A В В В до осей X , Х систем координат X O Y і Х О Y у відповідності з (21). На черговій дискреті кутової швидкості вала опори виконують п. 8. Балансують вал і установлюють під датчиками 21 C1, C2, C5, C6 величини зазорів, які забезпечують мінімум нормам (22). Якщо на черговій дискреті кутової швидкості . 0 , вал шпиндельної опори на постійних магнітах кр. 30 збалансований з високою точністю, а центри ваги планшайби і вала опори лежать на геометричній осі обертання вала радіальної шпиндельної опори. 10. Валу шпиндельної опори задають робочу роб . кутову швидкість обертання. На кожній дискреті кута повороту вала 1 , 1 2 , 1 3 ,…, 1 k ,…, кр. на N обертах вала N разів вимірюють величини зазорів: 0 0 ˆ ˆ Z1 , Z1 ˆ ˆ Z5 , Z 5 35 2 ˆ , Z1 2 ˆ , Z5 3 ˆ , Z1 3 ˆ , Z5 36 0 ˆ , …., Z1 36 0 ˆ , ..., Z 5 2 0 2 ˆ ˆ ˆ ; Z6 , Z 6 , Z6 3 ˆ , Z2 3 36 0 ˆ , ..., Z 2 ; 36 0 ˆ , Z6 ˆ , ..., Z 6 2 3 (24) під датчиками 21 С1, С2, С5, С6 величин зазорів, розраховують їх асимптотично незмiщені оцінки і приймають їх як опорні величини зазорів, які на дискретах кута повороту вала відповідають незміщеному положенню осі обертання вала опори 0 2 3 36 0 ˆ ˆ ˆ ˆ ˆ Z 1оп , Z1оп , Z1оп , Z1оп , …., Z1оп 0 2 3 36 0 ˆ ˆ ˆ ˆ ˆ Z 5оп , Z 5оп , Z 5оп , Z 5оп , ..., Z 5оп 40 0 ˆ ˆ ˆ ; Z2 , Z 2 , Z2 0 36 0 ˆ ˆ ˆ ˆ ˆ ; Z 2оп , Z 2оп , Z 2оп , Z 2оп , ..., Z 2оп 0 2 3 ; 36 0 ˆ ˆ ˆ ˆ ˆ ; Z 6оп , Z 6оп , Z 6оп , Z 6оп , ..., Z 6оп (25) 11. В процесі стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах поточні величини зазорів під датчиками 21 величин зазорів С1, С2, С5, С6 на дискретах кута повороту вала порівнюються з величинами опорних 7 UA 72701 U 5 10 15 20 25 30 35 40 45 50 55 зазорів. При відхиленні поточних величин зазорів від опорних виробляються сигнали неузгодження на групи силових магнітних відштовхувачів, установлених по осях систем Б Б Б Г Г Г координат Х О Y і X O Y в перерізах по Б-Б і Г-Г шпиндельної опори, які відповідають величинам цих відхилень і запобігають радіальному відхиленню осі обертання вала радіальної шпиндельної опори на постійних магнітах. Пристрій стабілізації радіального положення вала радіальної шпиндельної опори на постійних магнітах включає (Фіг. 1) корпус 1 опори, установлений складовий вал 2, 3, 4, що складається з співвісно з'єднаних вала 2, вала 3, вала 4 одного діаметра. По краях вала 3 в перерізах опори по Б-Б і Г-Г установлені магніти 5 вала, які виготовлені в формі порожнистих циліндрів з полюсами на внутрішній і зовнішній бокових поверхнях. В цих же перерізах над магнітами 5 вала установлені силові магнітні відштовхувачі 6, кожен з яких включає магніт 7 силового магнітного відштовхувача і п'єзоелектричний двигун 8, який служить для переміщення магніта 7 силового магнітного відштовхувача для зміни величини зазору між магнітом 5 вала і магнітом 7, а, отже, для регулювання сили відштовхування. В корпусі 1 опори в перерізах по Б-Б і Г-Г установлені по дванадцять силових магнітних відштовхувачів 6, які в кожному перерізі об'єднані в чотири групи 9, 10, 11, 12 і 13, 14, 15, 16 (по три в кожній групі) паралельно з'єднаних силових магнітних відштовхувачів 6 (Фіг. 2). В загальному випадку в цих перерізах може бути установлено n силових магнітних відштовхувачів, де n кратне чотирьом. Групи 9, 10, 11, 12 силових магнітних відштовхувачів і магніт 5 вала в перерізі по Б-Б опори утворюють силовий магнітний підвіс 17, групи 13, 14, 15, 16 і магніт 5 вала в перерізі по Г-Г утворюють силовий магнітний підвіс 18 (Фіг. 1, 2). Групи 9, 10, 11, 12, 13, 14, 15, 16 силових магнітних відштовхувачів установлюють B B B Г Г Г симетрично осей систем координат X O Y і X О Y . Таким чином вал опори знаходиться у зваженому стані в пружному середовищі магнітного поля силових магнітних підвісів. П'єзоелектричні двигуни 8 установлені в ізолятори 19, 20 - регулювальний гвинт для установлення початкового положення магнітів 7 силових магнітних відштовхувачів. A A A B B B В перерізах по А-А і В-В опори по осях систем координат X O Y і X O Y , початки яких лежать на осі симетрії внутрішньої поверхні корпусу 1 опори установлені датчики 21 величин зазорів між основами датчиків і валами 2 і 4 вала 2, 3, 4 опори. Датчики 21 установлені в керамічних втулках 22 (Фіг. 1, 3). Вимірювачі 23 величин зазорів (Фіг. 8) забезпечують вимірювання величин зазорів з -3 -2 погрішність, яка не перевищує 10 ÷10 величини зазору, що вимірюється (Гриневич Б.Ф. Компенсационно-мостовые измерительные устройства с емкостными датчиками. - Киев: Наукова Думка, 1987 г.) Напруги з вимірювачів 23 величин зазорів, які відповідають величинам зазорів, що вимірюються, надходять в обчислювач 24. Обчислювач 24 забезпечує: - вибір незміщеного положення осі обертання вала 2, 3, 4; - розрахунок величини зміщення геометричної осі обертання вала опори під дією динамічного навантаження. - Формування і зберігання масиву величин опорних зазорів. Як обчислювач може використовуватись комп'ютер, оснащений пристроєм вводу - виводу інформації для зв'язку з зовнішніми функціональними елементами. 25 - вимірювач кута повороту вала опори, за який може використовуватись обертальний трансформатор. Сигнали управління для установки геометричної осі обертання вала в незміщене положення з обчислювача 24 находять на пари операційних підсилювачів 26 і 27 (на прямий вхід операційного підсилювача 26 і інвертуючий вхід операційного підсилювача 27). Перемикачі 28 "пряме-вимк.-зворотне" служать для забезпечення зміни напрямку Б Б Б Г Г Г переміщення вала 2, 3, 4 опори по відповідній осі систем координат X O Y і X О Y . 29, 30, 31, 32 - диференційні підсилювачі сигналів неузгодження підсилюють сигнали управління, які надходять з пар 26 і 27 операційних підсилювачів сигналів управління, а також сигнали неузгодження між опорними зазорами і поточними величинами зазорів. Вимикачі 33 "увімк.-вимк." служать для відключення диференційних підсилювачів 29, 30, 31, 32 від груп 9, 10, 11, 12, 13, 14, 15, 16 силових магнітних відштовхувачів при настроюванні пристрою. Вимикач 34 служить для підключення вимірювачів 23 величин зазорів по датчиках 21 A A В B A A A в в в величин зазорів, установлених по півосях +X , +Y , +X , +Y систем координат X O Y і Х О Y до перших входів операційних підсилювачів 29, 30, 31, 32. 8 UA 72701 U 5 10 15 20 25 30 35 40 45 50 Вмикач 35 служить для підключення виходів опорних зазорів обчислювач 24 до других входів диференційних підсилювачів 29, 30, 31, 32 сигналів неузгодження. На кресленнях також позначені: 36 - планшайба, 37 і 38 диски, маси яких дорівнюють масі вала і масі планшайби, 39 - екрани магнітів. Причому датчики 21 величин зазорів з'єднані з входами вимірювачів 23 величин зазорів, а їх виходи з'єднані з входами обчислювача 24, вихід вимірювача 25 кута повороту вала з'єднаний з входом обчислювача 24, виходи обчислювача 24 з'єднані з входами пар операційних підсилювачів 26 і 27, а їх виходи через перемикачі 28 "пряме-вимк.- зворотнe" з'єднані з входами першого, другого, третього і четвертого диференційних підсилювачів 29, 30, 31, 32 сигналів неузгодження, вихід першого диференційного підсилювача 29 сигналу неузгодження через перемикач 33 "увімк.-вимк." з'єднаний з групами 10 і 12 силових магнітних відштовхувачів, Б Б Б Б установлених по осі Y системи координат X O Y , вихід другого диференційного підсилювача 30 сигналу неузгодження через перемикач 33 "увімк.-вимк." з'єднаний з групами 9 і 11 силових Б Б Б Б магнітних відштовхувачів, установлених по осі X системи координат X O Y , вихід третього диференційного підсилювача 31 сигналу неузгодження через перемикач 33 "увімк.-вимк." Г з'єднаний з групами 14 і 16 силових магнітних відштовхувачів, установлених по осі Y системи Г Г Г координат X О Y , вихід четвертого диференційного підсилювача 32 сигналу неузгодження через перемикач 33 "увімк.-вимк." з'єднаний з групами 13 і 15 силових магнітних відштовхувачів, Г Г Г Г установлених по осі X системи координат X О Y , виходи вимірювачів 23 величин зазорів по A A В В сигналах датчиків величин зазорів, установлених по півосях +X , +Y , + X , +Y систем A A A В В В координат X O Y і Х О Y через вимикач 34 з'єднані з першими входами диференціальних підсилювачів 29, 30, 31, 32 сигналів неузгодження, виходи опорних зазорів обчислювача 24 через вимикач 35 з'єднані з другими входами диференціальних підсилювачів 29, 30, 31, 32 сигналів неузгодження. Працює пристрій стабілізації радіального положення осі обертання вала 2, 3, 4 шпиндельної опори на постійних магнітах наступним чином. Перший етап - підготовка пристрою до роботи. Перемикачі "пряме- вимк.-зворотне" установлюються в положення "вимк". Вимикачі 33 "увімк.вимк." установлюються в положення "увімк.". Виконується пуск підпрограми обчислювача 24 "Установка величин зазорів". У відповідності з алгоритмом роботи підпрограми величини зазорів під датчиками 21 С1÷С4 і С5÷С8 відображуються на екрані дисплея. Подачею сигналів управління Uyпp.1, Uyпp.2, Uyпp.3, Uyпp.4 на пари операційних підсилювачів і установлюючи перемикачі "пряме-вимк.-зворотне" в залежності від потрібного напрямку зміщення вала під датчиками 21 величин зазорів С1 і С3, С2 і С4, С5 і С1, С6 і С8, установлених по одній осі систем A A A В В B координат X O Y і X O Y установлюють рівні величини зазорів: Z1=Z3, Z2=Z4, Z5=Z7, Z6=Z8. Розраховується жорсткість шпиндельної опори на постійних магнітах. Нехай після установки рівних величин зазорів під датчиками величин зазорів величини зазорів під магнітами 7 відштовхувачів 6 груп силових магнітних відштовхувачів 9÷16, установлених по осях систем Б Б Б Г Г Г координат X O Y і X О Y складають, наприклад, 100 мкм. В обчислювач 24 уводять магнітну індукцію Вr від. магнітів 7 силових магнітних відштовхувачів, магнітну індукцію магнітів 5 вала Вr вала, площу полюсів SM магнітів відштовхувачів 7 і магнітів 5 вала, магнітну постійну 0, довжину магнітів lм, величини зазорів lз при яких будуть розраховуватись сили відштовхування, 0 A В магнітну жорсткість. Вал опори навантажують в напрямку півосей -Y і –Y1 систем координат A A A B B B X O Y і X O Y і під датчиками 21 С3 і С7 установлюють, наприклад, величини зазорів 90 мкм, а під датчиками 21 С3 і С7 величини зазорів 110 мкм. Розраховуються сили відштовхування між силовим магнітним підштовхувачем 6 і магнітом 5 вала для зазорів 90 мкм і 110 мкм по формулі (12). Розраховують сили відштовхування між групами 10 і 12, 14 і 16 силових магнітних відштовхувачів і магнітами вала по формулі Rвід.групи R 2R sin / 3 . (27) Розраховують різниці сил відштовхування між групами 10 і 12, 14 і 16 силових магнітних відштовхувачів в напрямку півосей +Y і +Y1 Y Y Y Y R1 R 90 R110 , R 2 R 90 R110 . (28) Б 55 Б Г Г Обчислюється жорсткість радіальної шпиндельної опори на постійних магнітах по формулі (15). Виконується пуск підпрограми обчислювача 24 "Розрахунок критичних швидкостей обертання". У відповідності з алгоритмом роботи підпрограми розраховуються критичні кутові швидкості планшайби кр.пл. і вала кр. вала у відповідності з (16). Вал шпиндельної опори установлюється на кут повороту 0 . Виконується пуск підпрограми обчислювача "Вимірювання і оцінювання величин зазорів 1". У відповідності з 9 UA 72701 U алгоритмом роботи підпрограми обчислювач 24 N разів опитує вимірювачі 23 величин зазорів 0 0 ˆ ˆ по сигналах датчиків 21 С1, С2 і C5, C6. Обчислюються асимптотично незміщені оцінки Z1 , Z 2 , 0 0 ˆ ˆ Z5 , Z 6 5 величин цих зазорів. Складовому валу 2, 3, 4 опори задається кутова швидкість обертання 1 , яка задовольняє умовам: 1 кр. пл. ; 1 кр. вала . Виконується пуск підпрограми обчислювача "Вимірювання і оцінювання величин зазорів 2". У відповідності з алгоритмом роботи підпрограми обчислювач на N обертах вала на куту повороту 0 опитує вимірювачі 23 величин зазорів по сигналах датчиків 21 С1, С2 і С5,С6 обчислюються асимптотично незміщені 0 0 0 0 ˆ ˆ ˆ ˆ оцінки Z , Z , Z , Z величин цих зазорів у відповідності з (18). 1 2 5 6 1 10 1 1 1 Виконується пуск підпрограми обчислювача 24 "Розрахунок величини зміщення геометричної осі обертання вала опори і кута нахилу векторів динамічного навантаження до А В A A A В В В осей X і X систем координат X O Y і Х О Y ". У відповідності з алгоритмом роботи підпрограми на куту 0 повороту вала обчислюються величини відхилень X A , Y A , XB , 1 B Y 1 15 1 1 величин зазорів під датчиками 21 C1, C2 і С5, С6 на кутовій швидкості обертання 1 , відносно величин зазорів під цими датчиками при незміщеному положенні геометричної осі обертання вала на тому ж куту 0 повороту вала. Розраховуються величини зміщення r і r1, геометричної осі обертання вала в площинах установки датчиків 21 величин зазорів і кут нахилу А В A A A B В В динамічного навантаження до осей X і Х систем координат X O Y і X O Y (Фіг. 9): 0 0 0 0 0 0 0 0 ˆ ˆ ˆ ˆ ˆ ˆ ˆ ˆ X A 1 Z 2 Z 2 ; Y A 1 Z1 Z1 ; XB 1 Z 7 Z 7 ; Y B 1 Z 6 Z 6 : 1 r X A arcsin 20 1 2 1 Y A 1 2 : r1 X B 1 1 2 YB 1 2 1 (29) Y A , Y B . 1 arcsin X A XB Методом послідовних наближень виконується балансування вала опори, наприклад свердлінням. Послідовно виконується пуск підпрограми "Балансування".У відповідності з алгоритмом роботи підпрограми на кожному кроці балансування на кутовій швидкості 1 0 0 ˆ ˆ обчислювач 24 N разів опитує вимірювачі 23 величин зазорів. Обчислюються оцінки Z , Z , 1 2 1 0 25 1 0 ˆ ˆ Z 5 , Z 6 . Обчислюється різниці по нормі між оцінками величин зазорів, які відповідають 1 1 незміщеному положенню геометричної осі обертання вала і оцінками цих величин зазорів чергового кроку балансування на 1 кутовій швидкості 1 у відповідності з (25). 30 35 40 45 Добиваються мінімуму норм (25). В результаті на кутовій швидкості 1 геометрична вісь обертання вала займе близьке до незміщеного положення або незміщене положення. Якщо норм (25) не рівна нулю на швидкості обертання 1 вала, підвищують швидкість обертання вала з кроком . На черговому дискретному значенні кутової швидкості виконується пуск підпрограм “Розрахунок величини зміщення геометричної осі обертання вала і кута нахилу A B A A A B B B вектора динамічного навантаження до осей X і Х систем координат X O Y і X O Y ” i “Балансування”. Досягають рівності нулю норм (25). Вал шпиндельної опори буде збалансований з високою точністю, центри інерції планшайби 36 і складового вала 2, 3 будуть лежать на геометричній осі обертання вала опори. Обертання вала опори без зміщення буде здійснюватись навколо геометричної осі обертання. Валу опори задається робоча роб . швидкість обертання і виконується пуск підпрограми "Формування масиву величин опорних зазорів". У відповідності з алгоритмом підпрограми на дискретах кута повороту вала 1 , 1 2 , 1 3 ,…, 1 k ,…, кр. на N обертах вала N разів вимірюють величини зазорів під датчиками 21 C1, C2 і C5, C6. Розраховують асимптотично незміщені оцінки величин цих зазорів і приймають їх як опорні зазори, що відповідають незміщеному положенню геометричної осі обертання вала опори. Формується масив величин опорних зазорів (25). На цьому закінчується підготовчій етап роботи пристрою. Пристрій переводиться в режим роботи "Стабілізація". Для переводу пристрою в режим роботи "Стабілізація" перемикачі 28 установлюються в положення "вимк.". Операційні підсилювачі 26 і 27 відключаються від входів диференційних 10 UA 72701 U 5 10 підсилювачів 29, 30, 31, 32 сигналів неузгодження. Вимикачі 34 і 35 установлюються в положення "увімк.". Виходи вимірювачів 23 вимикачем 34 підключаються до перших входів диференціальних підсилювачів 19, 30, 31, 32. Величини опорних зазорів з обчислювача 24 через вимикач 35 надходять на другі входи диференціальних підсилювачів. В процесі стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах поточні значення величин зазорів під датчиками 21 величин зазорів С1, С2 і С5, С6 з вимірювачів 23 надходять на перші входи диференційних підсилювачів. На другі входи цих підсилювачів надходять напруги величин опорних зазорів, які на дискретах кута повороту вала опори відповідають незміщеному положенню осі обертання вала. При відхиленні поточних величин зазорів від опорних виробляються сигнали неузгодження на групи силових Б Б Б Г Г Г магнітних відштовхувачів, установлених по осях систем координат Х О Y і X О Y в перерізах по Б-Б і Г-Г радіальної шпиндельної опори, які відповідають величині цього відхилення і які запобігають зміщенню осі обертання вала опори з незміщеного положення. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 30 35 40 45 50 Спосіб стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах, який включає вимірювання величин зазорів між валом радіальної шпиндельної опори на постійних магнітах і основами датчиків величин зазорів, визначення незміщеного положення осі обертання вала шпиндельної опори на постійних магнітах, формування масивів опорних величин зазорів, вироблення сигналів неузгодження на силові магнітні підвіси, який відрізняється тим, що датчики величин зазорів установлюють по окружності внутрішньої поверхні корпусу радіальної шпиндельної опори на постійних магнітах в перерізах по А-А i В-В опори над магнітами вала шпиндельної опори на постійних магнітах по A A A B B B осях систем координат X O Y і X O Y по зовнішніх сторонах магнітних силових відштовхувачів, початки яких лежать на осі симетрії внутрішньої поверхні корпуса опори, подають сигнали управління на групи паралельно з'єднаних силових магнітних відштовхувачів, установлених в корпусі опори в перерізах по Б-Б і Г-Г опори над магнітами вала шпиндельної Б Б Б Г Г Г опори на постійних магнітах по осях систем координат X O Y і X О Y , осі яких паралельні між A A A B B B собою і паралельні осям систем координат X O Y X O Y , і під датчиками величин зазорів, A A A В В В установлених по однойменних осях систем координат X O Y і X O Y , установлюють рівні величини зазорів, вісь симетрії вала шпиндельної опори на постійних магнітах суміщують з A A A В В В початками систем координат X O Y і X O Y , вісь симетрії вала приймають як геометричну вісь обертання вала опори, розраховують силу відштовхування між групами силових магнітних Б Б Б Г Г Г відштовхувачів, установлених по однойменних осях систем координат X O Y і X О Y , і магнітами вала опори при заданій величині зсуву вала опори по цих осях і розраховують жорсткість радіальної шпиндельної опори на постійних магнітах, розраховують критичні кутові швидкості планшайби і вала опори, вал радіальної шпиндельної опори на постійних магнітах установлюють на кут повороту 0 , N разів вимірюють величини зазорів під датчиками A А В В A A A В В В величин зазорів, установлених по півосях +X , +Y , +X , +Y систем координат X O Y і X O Y і обчислюють їх асимптотично незміщені оцінки, положення геометричної осі обертання вала опори, при якому на куту 0 повороту вала опори величини зазорів під датчиками величин зазорів рівні виміряним, приймається як незміщене, валу опори задають швидкість обертання 1 , яка задовольняє нерівностям 1 кр. вала і 1 кр. пл. , на куту 0 повороту вала N разів на N обертах вала вимірюють величини зазорів під датчиками величин зазорів, установлених по А A В В A A A В В В півосях +Х , +Y , +Х , +Y систем координат X O Y і X O Y і обчислюють їх асимптотично незміщені оцінки, обчислюється величина зсуву геометричної осі обертання вала під дією динамічного навантаження в площині установки датчиків величин зазорів по осях систем А А A В В В координат Х О Y і X О Y і розраховуються величини зсуву геометричної осі обертання вала і А В кути нахилу векторів динамічного навантаження на вал опори до осей X і X систем А А А В В В координатX O Y і X O Y , на кутовій швидкості 1 балансують вал опори і установлюють під А A В В датчиками величин зазорів, установлених по півосях +Х , +Y , +Х , +Y систем координат A A A В В В X O Y і X O Y , величини зазорів, які забезпечують мінімум нормі різниць 2 ˆ 0 ˆ 0 ˆ 0 ˆ 0 Z1 Z1 Z 2 Z 2 1 1 55 2 2 ˆ 0 ˆ 0 ˆ 0 ˆ 0 1 Z 5 Z 5 Z 6 Z 6 1 1 2 і наближають геометричну вісь обертання вала до її незміщеного положення або установлюють її в незміщене положення, якщо норма різниць дорівнює нулю, якщо норма різниць не дорівнює нулю з кроком збільшують кутову швидкість обертання вала опори, на кожному кроці 11 UA 72701 U 5 10 15 підвищення швидкості обертання балансують вал опори, після балансування вала на к-му кроці підвищення кутової швидкості обертання вала на куту повороту 0 N разів на N обертах вала A A вимірюють величини зазорів під датчиками величин зазорів, установлених по півосях +X , +Y , B В A A A В В В +X , +Y систем координат X O Y і Х О Y , і обчислюють норму різниць, якщо норма різниць наближається до нуля, вал радіальної шпиндельної опори на постійних магнітах збалансований з високою точністю, валу опори задають робочу швидкість обертання, на кожному дискретному куту повороту вала опори 0 , , 2 , …, k , …, 360 N разів на N обертах вала вимірюють величини зазорів під датчиками величин зазорів, установлених по A A A B A A A B B B півосях +X , +Y , +X , +Y систем координат X O Y і X O Y , обчислюють їх асимптотично незміщені оцінки і приймають їх як величини опорних зазорів, які відповідають незміщеному положенню осі обертання вала опори, в процесі стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах поточні значення величин A A B B зазорів під датчиками величин зазорів, установлених по півосях +X , +Y , +X , +Y систем A A A B B B координат X O Y і Х О Y на дискретах кута повороту вала опори, порівнюються з величинами відповідних опорних зазорів, при відхиленні поточних величин зазорів від опорних виробляються сигнали неузгодження на відповідні групи силових магнітних відштовхувачів, які відповідають величинам відхилення поточних величин зазорів від опорних, чим запобігають відхиленню осі обертання вала шпиндельної опори на постійних магнітах з незміщеного положення, 0 20 0 0 0 ˆ ˆ ˆ ˆ де: Z1 , Z 2 , Z5 , Z 6 - асимптотично незміщені оцінки величин зазорів під датчиками величин А A B B A A A B B B зазорів, установлених по півосях +Х , +Y , +X , +Y систем координат X O Y і X O Y на куту 0 повороту вала при вала 0 ; 0 0 0 0 ˆ ˆ ˆ ˆ Z1 , Z 2 , Z 5 , Z 6 - асимптотично незміщені оцінки величин зазорів під датчиками величин 1 1 1 1 A 25 A B B A A A B H B зазорів, установлених по півосях +X , +Y , +X , +Y систем координат X O Y і X O Y на куту 0 повороту вала при вала 1 . 12 UA 72701 U 13 UA 72701 U 14 UA 72701 U 15 UA 72701 U 16 UA 72701 U Комп’ютернаверстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 17
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for stabilizing radial position of axis of rotation of shaft of radial spindle bearing on permanent magnets
Автори англійськоюHrytsenko Volodymyr Illich, Tarasov Viktor Oleksiiovych, Zinenko Volodymyr Mykolaiovych
Назва патенту російськоюСпособ стабилизации радиального положения оси вращения вала радиальной шпиндельной опоры на постоянных магнитах
Автори російськоюГриценко Владимир Ильич, Тарасов Виктор Алексеевич, Зиненко Владимир Николаевич
МПК / Мітки
МПК: F16C 32/06, B23B 19/00
Мітки: опори, положення, осі, шпиндельної, радіальної, обертання, радіального, стабілізації, спосіб, постійних, магнітах, вала
Код посилання
<a href="https://ua.patents.su/19-72701-sposib-stabilizaci-radialnogo-polozhennya-osi-obertannya-vala-radialno-shpindelno-opori-na-postijjnikh-magnitakh.html" target="_blank" rel="follow" title="База патентів України">Спосіб стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах</a>
Пристрій балансування вала радіальної шпиндельної опори на постійних магнітах
Номер патенту: 72700
Опубліковано: 27.08.2012
Автори: Тарасов Віктор Олексійович, Гриценко Володимир Ілліч, Зіненко Володимир Миколайович
МПК: F16C 32/06
Мітки: опори, пристрій, постійних, балансування, вала, шпиндельної, радіальної, магнітах
Формула / Реферат:
Пристрій балансування вала радіальної шпиндельної опори на постійних магнітах, який включає датчики величин зазорів, вимірювачі величин зазорів, обчислювач, який відрізняється тим, що включає складений вал шпиндельної опори, який складається з трьох співвісно встановлених валів, на кінцях середнього вала в екранах встановлені постійні магніти вала у вигляді порожнистих циліндрів з полюсами на внутрішній і зовнішній бокових поверхнях, в...
Спосіб стабілізації радіального положення осі обертання вала аеростатичної шпиндельної опори
Номер патенту: 69126
Опубліковано: 16.08.2004
Автори: Зіненко Володимир Миколайович, Тарасов Віктор Олексійович
МПК: F16C 32/06
Мітки: положення, обертання, спосіб, шпиндельної, опори, осі, аеростатичної, вала, стабілізації, радіального
Формула / Реферат:
Спосіб стабілізації радіального положення осі обертання вала аеростатичної шпиндельної опори, який включає апроксимацію еліпсами обвідних перерізів вала аеростатичної шпиндельної опори площинами установки датчиків величин зазорів, розрахунок координат датчиків величин зазорів, установлених по осях систем координат з суміщеними початками, які лежать в площинах установки датчиків величин зазорів, розрахунок і оцінку координат осі обертання...
Пристрій стабілізації радіального положення осі обертання вала радіальної аеростатичної опори
Номер патенту: 98995
Опубліковано: 10.07.2012
Автори: Тарасов Віктор Олексійович, Левін Ігор Олексійович
МПК: B23B 19/00
Мітки: стабілізації, радіальної, положення, опори, вала, обертання, пристрій, радіального, осі, аеростатичної
Формула / Реферат:
Пристрій стабілізації радіального положення осі обертання вала радіальної аеростатичної опори, який містить компенсатори радіального зміщення осі обертання вала радіальної аеростатичної опори, вимірювачі величин зазорів, вимірювач кута повороту вала радіальної аеростатичної опори, обчислювач, операційні підсилювачі, диференційні підсилювачі сигналів неузгодження, перемикачі "пряме - вимк. - зворотне", вимикачі "увімк. -...
Пристрій стабілізації радіального положення осі обертання вала радіальної аеростатичної опори
Номер патенту: 57411
Опубліковано: 25.02.2011
Автори: Тарасов Віктор Олексійович, Левін Ігор Олексійович
МПК: B23B 19/00
Мітки: осі, аеростатичної, положення, радіальної, обертання, радіального, вала, стабілізації, опори, пристрій
Формула / Реферат:
Пристрій стабілізації радіального положення осі обертання вала радіальної аеростатичної опори, що містить компенсатори радіального зміщення осі обертання вала радіальної аеростатичної опори, вимірювачі величин зазорів, вимірювач кута повороту вала радіальної аеростатичної опори, обчислювач, операційні підсилювачі, диференціальні підсилювачі сигналів неузгодження, перемикачі "пряме - вимк. - зворотне", вимикачі "увімк. -...
Пристрій для юстирування положення лінійної напрямної і різцевої головки відносно осі обертання вала аеростатичної шпиндельної опори суперпрецизійного двокоординатного верстата
Номер патенту: 52410
Опубліковано: 16.12.2002
Автор: Зіненко Володимир Миколайович
МПК: B23B 41/00
Мітки: аеростатичної, юстирування, верстата, лінійної, напрямної, обертання, шпиндельної, вала, опори, різцевої, осі, головки, суперпрецизійного, пристрій, відносної, двокоординатного, положення
Формула / Реферат:
Пристрій для юстирування положення лінійної напрямної і різцевої головки відносно осі обертання вала аеростатичної шпиндельної опори суперпрецизійного двокоординатного верстата, який містить регулювальні гвинти положення лінійної напрямної, регулювальні гвинти положення різцевої головки, який відрізняється тим, що він має пристрій позиціонування датчиків величин проміжків, який включає втулку, до якої прикріплені два кронштейни, на кінцях...
Попередній патент: Пристрій балансування вала радіальної шпиндельної опори на постійних магнітах
Наступний патент: Канал автоматичного супроводження літальних апаратів за напрямком з бспм та додатковим скануванням для лівс полігонного випробувального комплексу
Випадковий патент: Ротор відцентрово-ударної дробарки