Пристрій для юстирування положення лінійної напрямної і різцевої головки відносно осі обертання вала аеростатичної шпиндельної опори суперпрецизійного двокоординатного верстата
Формула / Реферат
Пристрій для юстирування положення лінійної напрямної і різцевої головки відносно осі обертання вала аеростатичної шпиндельної опори суперпрецизійного двокоординатного верстата, який містить регулювальні гвинти положення лінійної напрямної, регулювальні гвинти положення різцевої головки, який відрізняється тим, що він має пристрій позиціонування датчиків величин проміжків, який включає втулку, до якої прикріплені два кронштейни, на кінцях кронштейнів установлені корпуси датчиків величин проміжків, в яких з можливістю зміщення по висоті проміжку установлені датчики величин проміжків, і блок вимірювання і оцінки величин проміжків і обчислення критерію паралельності напрямку переміщення рухомого елемента різцевої головки осі обертання вала аеростатичної шпиндельної опори, який включає комутатор датчиків величин проміжків, вимірювач величин проміжків і обчислювач, причому датчики величин проміжків з’єднані з комутатором датчиків величин проміжків, комутатор датчиків величин проміжків з’єднаний з входом вимірювача величин проміжків, а його вихід з’єднаний з першим входом аналого-цифрового перетворювача, перший вихід обчислювача з’єднаний з другим входом аналого-цифрового перетворювача, другий вихід обчислювача з’єднаний з третім входом аналого-цифрового перетворювача, а його вхід з’єднаний з виходом аналого-цифрового перетворювача.
Текст
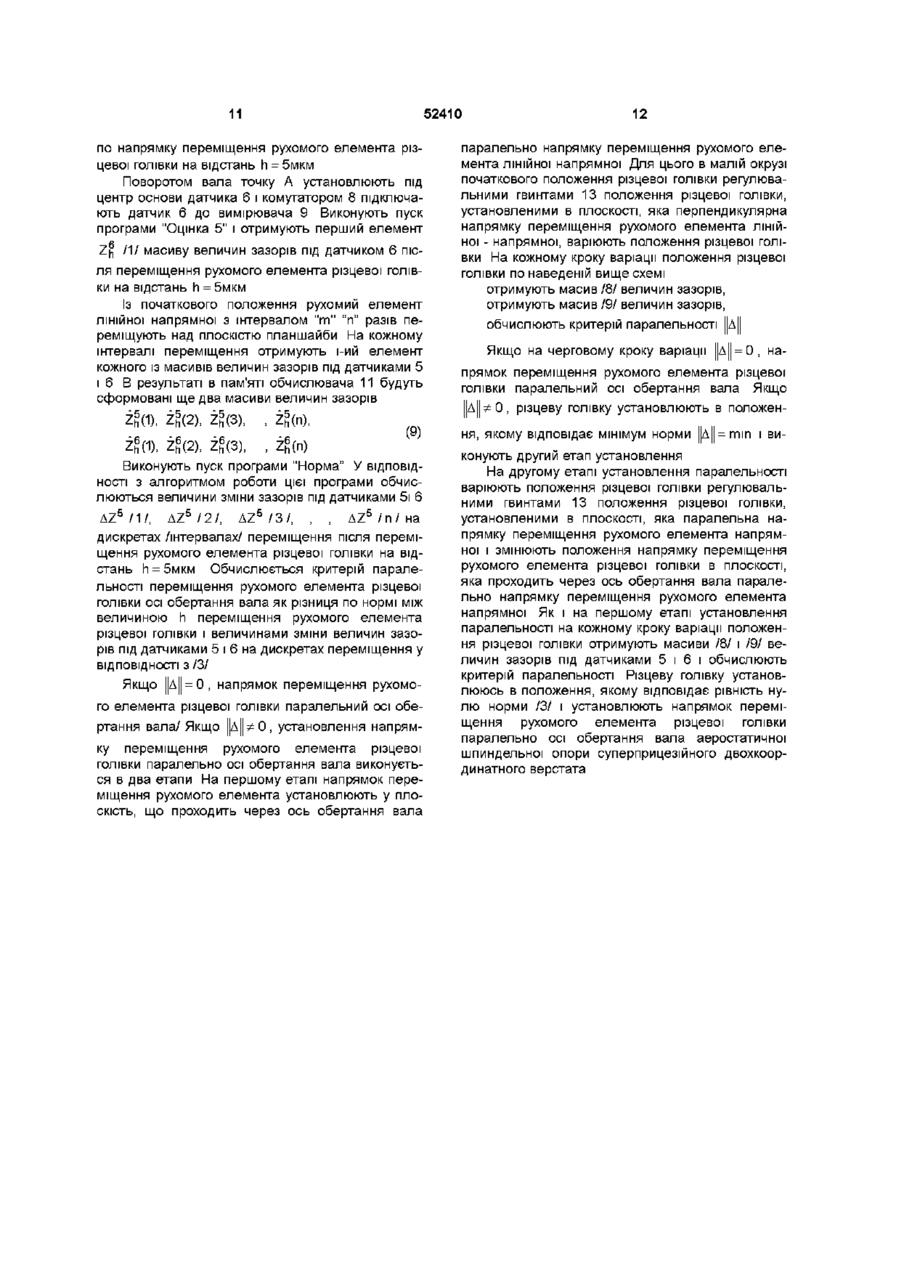
Пристрій для юстирування положення лінійної напрямної і різцевої головки відносно осі обертання вала аеростатичної шпиндельної опори суперпрецизійного двокоординатного верстата, який містить регулювальні гвинти положення лінійної напрямної, регулювальні гвинти положення різцевої головки, який відрізняється тим, що він має пристрій позиціонування датчиків величин проміжків, який включає втулку, до якої прикріплені два кронштейни, на кінцях кронштейнів установлені корпуси датчиків величин проміжків, в яких з можливістю зміщення по висоті проміжку установлені датчики величин проміжків, і блок вимірювання і оцінки величин проміжків і обчислення критерію паралельності напрямку переміщення рухомого елемента різцевої головки осі обертання вала аеростатичної шпиндельної опори, який включає комутатор датчиків величин проміжків, вимірювач величин проміжків і обчислювач, причому датчики величин проміжків з'єднані з комутатором датчиків величин проміжків, комутатор датчиків величин проміжків з'єднаний з входом вимірювача величин проміжків, а його вихід з'єднаний з першим входом аналого-цифрового перетворювача, перший вихід обчислювача з'єднаний з другим входом аналогоцифрового перетворювача, другий вихід обчислювача з'єднаний з третім входом аналогоцифрового перетворювача, а його вхід з'єднаний з виходом аналого-цифрового перетворювача Винахід відноситься до верстатобудування і забезпечує установку лінійної напрямної верстата у положення, при якому напрямок переміщення її рухомого елемента перпендикулярний осі обертання вала, і установки різцевої голівки у положення, при якому напрямок переміщення її рухомого елемента паралельний осі обертання вала аеростатичної шпиндельної опори верстата По а с СРСР № 921818 від 23 04 82р бюл №15 відомий "Пристрій для регулювання положення вузла верстата" Цей пристрій вибраний в якості прототипу З нерухомим корпусом цього пристрою жорстко з'єднана гільза, в середині якої розміщений порожнистий плунжер В двох соосних діаметральних отворах плунжера розташовані кульки, які контактують з конусною втулкою і з пружнодеформуемою ділянкою гільзи Диференціальний гвинт за допомогою однієї різьбової ділянки з'єднаний з плунжером, а за допомогою другої різьбової ділянки - з конусною втулкою Гайка фіксує плунжер відносно гільзи Верхня опора плунжера жорстко звязана з столом верстата Пристрій прототипу працює наступним чином При необхідності змінити положення стола з вузлом верстата, який лежить на опорах плунжерів, обертають диференціальний гвинт у відповідному напрямку Внаслідок того, що кроки різьби на ділянках диференціального гвинта різні, результируюче переміщення конусної втулки при повороті гвинта на один оберт дорівнює різниці цих кроків Це забезпечує можливість змінювати висоту опори на малу величину Недоліком пристрою прототипу являється наступне Пристрій дозволяє одночасно регулювати положення /методом послідовних наближень/тільки одного вузла верстата Для регулювання положення вузла верстата виконують ряд проходів різцем, наприклад, плоскої поверхні Після кожного проходу поверхні вимірюють погрішність обробки і змінюють положення вузла верстата так, щоб погрішність обробки зменшувалася Вузол верстата залишають у положенні, якому відповідав мінімальна погрішність обробки ю 52410 У даному випадку лінійну напрямну необхідно установити так, щоб и рухомий елемент пересувався перпендикулярно осі обертання вала аеростатичної шпиндельної опори, а рухомий елемент різцевої голівки, яка установлена на основі лінійної напрямної - паралельно осі обертання вала цієї опори Пристрій прототипу не дозволяв визначити, який з двох зв'язаних вузлів верстата встановлений з погрішністю, а тому не може використовуватися для їх юстіровки Задача, що вирішується, полягає у такому удосконалені пристрою прототипу, яке дозволяє безпосередньо без виконання точіння або шліфування послідовно виявити відхилення напрямку переміщення рухомого елемента лінійної напрямної від перпендикулярного осі обертання вала аеростатичної шпиндельної опори і з високою точністю установити напрямок переміщення рухомого елемента перпендикулярно осі обертання вала цієї опори і виявити відхилення напрямку переміщення рухомого елемента різцевої голівки від паралельного осі обертання вала аеростатичної шпиндельної опори і також з високою точністю установити напрямок його переміщення паралельно осі обертання вала цієї опори Рішення цієї задачі досягається тим, що пристрій для юстіровки положення лінійної напрямної і різцевої голівки відносно осі обертання вала аеростатичної шпиндельної опори суперпрецизійного двохкоординатного верстата, який містять регулювальні гвинти положення лінійної напрямної, регулювальні гвинти положення різцевої голівки, згідно винаходу, він наділений пристроєм позиціонування датчиків величин зазорів, який включає втулку, до якої прикріплені два кронштейна, на кінцях кронштейнів установлені корпуси датчиків величин зазорів, в яких з можливістю зміщення по висоті зазора установлені датчики величин зазорів, і блоком вимірювання і оцінки величин зазорів і обчислення критерію паралельності напрямку переміщення рухомого елемента різцевої голівки осі обертання вала аеростатичної шпиндельної опори, який включає комутатор датчиків величин зазорів, вимірювач величин зазорів і обчислювач, причалу, датчики величин зазорів з'єднані з комутатором датчиків величин зазорів, комутатор датчиків величин зазорів з'єднаний з входом вимірювача величин зазорів, а його вихід з'єднаний з перший першим входом аналого - цифрового перетворювача вихід обчислювача з'єднаний з другим входом аналого - цифрового перетворювача, другий вихід обчислювача з'єднаний з третім входом аналого - цифрового перетворювача, а його вхід з'єднаний з виходом аналого - цифрового перетворювача Причинно - наслідковий зв'язок технічного рішення, що заявляється, з досягаємим технічним результатом полягає у наступному На кресленні (див фіг 1) представлений суперпрецизійний двохкоординатний верстат, який включає станину 27 з установленими на ній стояками ЗО Станина лежить на віброкомпенсуючіх опорах 28, які забезпечують гасіння коливань поверхні Землі На стояках з можливістю зміни положення за допомогою регулювальних гвинтів 12 установлена лінійна напрямна 22 /патент України К 14905 А від 04 03 97р "Спосіб стабілізації рухомого елемента аеростатичної напрямної та пристрій для його здійснення"/ Лінійна напрямна обладнана пристроєм 15 стабілізації положення її рухомого елемента 14 відносно нерухомої у просторі плоскості Пристрій 15 забезпечує переміщення точок рухомого елемента 14 по прямим, паралельним плоскості стабілізації Переміщення рухомого елемента 14 забезпечується кроковим п'єзоелектричним двигуном, що включає штовхач 16 прямого хода, штовхач 17 зворотного хода і пристрій 18 управління штовхачами /ас СРСР й 1676417 від 08 05 91 р Пьезоэлектрический двигатель"/ На нижній основі рухомого елемента 14 напрямної 22 з можливістю зміни за допомогою регулювальних гвинтів 13 и положення відносно цього рухомого елемента 14 установлена різцева голівка 19 і пристрій 20 переміщення рухомого елемента 21 різцевої голівки 23 - пристрій переміщення вершини різця по розрахунковій траєкторії /"Спосіб переміщення вершини різця по розрахунковій траєкторії та пристрій для його здійснення" Пристрій 23 може використовуватися для позиціонування рухомого елемента 21 різцевої голівки за допомогою пристрою 20 переміщення рухомого елемента різцевої голівки /по координаті "Y", див фіг 1/, а також для позиціонування цього рухомого елемента за допомогою п'єзоелектричного двигуна по координаті "X" системи координат XOY, ось "X" якої паралельна напрямку переміщення рухомого елемента 14 напрямної 22, а ось "Y" суміщена з віссю обертання вала аеростатичної шпиндельної опори 24 Шпиндельна опора 24 установлена в станині 27 верстата і облатана пристроєм 26 стабілізації радіального положення осі обертання вала шпиндельної опори 24 /патент України "Пристрій компенсації радіальних навантажень на вал радіальної аеростатичної опори" № 25727 А від ЗОЮ 98р / і стабілізації осьового положення /див а с СРСР № 1639180 "Аэростатическая осевая опора" від 01 12 1990р / Ці пристрої забезпечують обертання кожної точки планшайби 25 у плоскості, яка перпендикулярна осі обертання вала опори 24 29 - пристрій поперечного переміщення різцевої голівки 19 Для досягнення високої точності обробки елементів оптики і механіки на двохкоординатному верстаті необхідно також, щоб точки рухомого елемента 14 лінійної напрямної 22 переміщувалися по прямим, перпендикулярних осі обертання вала аеростатичної шпиндельної опори 24, точки рухомого елемента 21 різцевої голівки 19 переміщувалися по прямим, паралельним осі обертання вала аеростатичної шпиндельної опори 24 При виконанні цих вимог ДІЙСНІ прирости координат ДХ / j / ДУ / j / на j-му кроку переміщення різця по розрахунковій траєкторії будуть відповідати розрахунковим Юстіровка положення лінійної напрямної 22 і 52410 різцевої голівки 19 може бути виконана наступним чином Установимо на рухомому елементі 21 різцевої голівки /див фіг 1/ пристрій 1 позиціонування датчиків величин зазорів, який представляє собою (див фіг 1,2) втулку 2 з установленими на ній двома кронштейнами 3 До торців кронштейнів прикріплені корпуси 4 датчиків 5 та 6 величин зазорів між основами цих датчиків і поверхнею планшайби 25 шпиндельної опори 24 Центри основ датчиків величин зазорів знаходяться на відстані "Ч" від осі симетрії втулки 2 Нехай в вихідному положенні рухомого елемента 14 лінійної напрямної ось симетрії втулки 2, що установлена на рухомому елементі 21 різцевої голівки, суміщена з віссю обертання вала шпиндельної опори 24, а пряма, що проходить через центри основ датчиків величин зазорів, перпендикулярна напрямку переміщення рухомого елемента 14 Центри основ датчиків розташовані на відстані "а" від плоскості, що проходить через ось обертання вала паралельно напрямку переміщення рухомого елемента 14 лінійної напрямної Точка А точка поверхні планшайби 25, що розташована на відстані "Ч" від осі обертання вала Отже, при обертанні вала опори 24, точка А буде лежати у плоскості, перпендикулярній осі обертання вала та проходити під центрами основ датчиків 5 і 6 величин зазорів Так як пристрій 1 позиціонування датчиків через різцеву голівку 19 жорстко зв'язаний з рухомим елементом 14 лінійної напрямної 22, центри основ датчиків величин зазорів також переміщуються по прямим, паралельним плоскості стабілізації і напрямку переміщення рухомого елемента 14 В початковому положенні рухомого елемента 14 (див фіг 2) обертанням вала опори точку А планшайби 25 послідовно установимо під центрами основ датчиків 5 і 6 величин зазорів і виміряємо зазори Z n , і Zn6, між основами цих датчиків і планшайбою 25 /над точкою А/ Перемістимо рухомий елемент напрямної 22 по напрямку переміщення на відстань L = 2\/г2 - а 2 (див фіг 2) Обе ртанням вала шпиндельної опори знов послідовно установимо точку А планшайби під центрами основ датчиків величин зазорів і виміряємо величини зазорів Z|_5 і Z|_6 Нагадаємо, що точка А поверхні планшайби переміщується в плоскості, перпендикулярній осі обертання вала Отже, якщо v5 _ 76 z 76 - 76 мі z n -ZL> n -ZL> Ш напрямок переміщення рухомого елемента 14 лінійної напрямної паралельний плоскості, що перпендикулярна осі обертання вала /перпендикулярний осі обертання вала/ Якщо (1) не виконується, регулювальними гвинтами 12 зміни положення лінійної напрямної 22 змінюють положення цієї напрямної і установлюють напрямок переміщення рухомого елемента 14 перпендикулярно осі обертання вала шпиндельної опори 24 Отже, в результаті виконаного установлення точки рухомого елемента 14 напрямної переміщуються по прямим, які перпендикулярні осі обертання вала Звідси витікає, що в якості плоскості стабілізації рухомого елемента 14 напрямної може бути прийнята плоскість Q (див фіг 3), паралельна плоскості Р, яка перпендикулярна осі обертання вала Установимо критерій паралельності напрямку переміщення рухомого елемента різцевої голівки осі обертання вала шпиндельної опори Нехай напрямок переміщення рухомого елемента 21 перпендикулярний плоскості Р (див фіг 3) Тоді при переміщенні рухомого елемента 21 різцевої голівки точки основ датчиків величин зазорів також переміщуються по прямим, перпендикулярним плоскостям Q і Р А це значить, що ці точки по висоті зазору зміщуються над одними і тими точками планшайби Тому, якщо рухомий елемент 21 перемістити на величину ± п, величини зазорів під датчиками величин зазорів змішаються на величину h і стають рівними Z 5 + h і Z 6 + h Припустимо, що напрямок переміщення рухомого елемента різцевої голівки не перпендикулярний плоскості Р Тоді при переміщенні рухомого елемента 21 в напрямку планшайби величини зазорів під датчиками величин зазорів будуть ВІДПОВІДНО Z5 - h + Д рівними і Z 6 - п + Д, де Д визначається величиною кута відхилення напрямку переміщення рухомого елемента 21 від перпендикулярного ПЛОСКОСТІ Р В якості критерію паралельності переміщення рухомого елемента різцевої голівки осі обертання вала приймається рівність величини h переміщення рухомого елемента 21 різцевої голівки величині с зміни A Z с = Zp с е Z£ а б о A Z с = Zp с Z£ в е л и ч и н и зазору під датчиком величини зазору, де Z n і Zk величина зазору під датчиком величини зазору до і після переміщення рухомого елемента 21 на величину h h=AZ5=AZ6 (2) Наявність мікронерівностей і неплоскістність поверхні планшайби визначають те, що величина Д стає залежною не тільки від кута відхилення напрямку переміщення рухомого елемента 21 від перпендикулярного плоскості Р, а також від погрішностей розмірів і форми виготовлення планшайби 3 цього витікає, що в загальному випадку Д випадкова величина, яка може прямувати до нуля і при відхиленні напрямку переміщення від перпендикулярного ПЛОСКОСТІ Р Для стійкої роботи уведеного критерію слід зробити наступним чином Установимо рухомий елемент лінійної напрямної у вихідне положення і будемо переміщувати його у напрямку переміщення, зупиняючі на відстанях т , 2 т , , п т , де т - наприклад дискрета стабілізації рухомого елемента 14 лінійної напрямної (див фіг 4) На кожній дискреті вимірюються величини зазорів Z 5 / l / , Z 5 /2/, Z 5 /3/, , , Z'ini iZ6l\l, Z 6 /2/, Z 6 /3/, , , Z6/n/ Повернемо рухомий елемент лінійної напрямної у вихідне положення і перемістимо рухомий елемент різцевої голівки у напрямку планшайби на величину h Повторно перемістимо рухомий елемент лінійної напрямної в кінцеве положення і на 52410 кожній дискреті переміщення виміряємо величини зазорів Zl/IL ZI/2L Zh 131, /2/, А ZI/3L , , г Z6J\L , , Zlini Zh Inl Обчислюються різності 5 5 5 AZ /3/. AZ /2/, ( AZJ ini AZ /3/, 6 AZ /1/, Z6ini, 6 AZ 'i\i, AZ /2/, 5(6)_-, 5(6) -, 5(6) V ДЄ AZ '=Z n -Zk Тоді СТІЙКИМ критерієм паралельності напрямку переміщення рухомого елемента різцевої голівки осі обертання вала аеростатичної шпиндельної різностей опори є рівність нулю по нормі різностей між величиною переміщення рухомого елемента 21 і величинами зміни величин зазорів під датчиками величин зазорів на дискретах переміщення рухомого елемента лінійної напрямної, 5 (h-AZ (V)f 5 2 AZ (n)) + 6 2 (h-AZ (V)) 6 2 (h-AZ (2)) 6 (h-AZ (n))\ що не суперечить по смислу уведеному критерію Винахід пояснюється кресленнями фіг 1 - суперпрецизійний двохкоординатний верстат, фіг 2 - пристрій позиціонування датчиків величин зазорів фіг 3 - ілюстрація критерію установлення напрямку переміщення рухомого елемента різцевої голівки паралельно осі обертання вала аеростатичної шпиндельної опори, фіг 4 - вимірювання величин зазорів на дискретах стабілізації положення рухомого елемента лінійної напрямної, фіг 5 - блок вимірювання і оцінки величин зазорів та обчислення критерію паралельності напрямку переміщення рухомого елемента різцевої голівки осі обертання вала аеростатичної шпиндельної опори Пристрій для юстіровки положення лінійної напрямної та різцевої голівки відносно осі обертання вала аеростатичної шпиндельної опори суперпрецизійного двохкоординатного верстата включає пристрій 1 позиціонування датчиків величин зазорів, що включає втулку 2, до якої прикріплені кронштейни 3 На кінцях кронштейнів 3 установлені корпуси 4 датчиків величин зазорів, в яких з можливістю зміщення по висоті зазору установлені датчики біб величин зазорів Пристрій 1 позиціонування датчиків величин зазорів за допомогою втулки 2 установлюється на рухомому елементі різцевої голівки і служить для позиціонування центрів основ датчиків 5 і 6 величин зазорів над точками поверхні планшайби В склад пристрою входить також блок 7 вимірювання і оцінки зазорів і обчислення критерію паралельності напрямку переміщення рухомого елемента різцевої голівки осі обертання вала аеростатичної шпиндельної опори, Блок 7 включає комутатор 8 датчиків величин зазорів, який забезпечу» підключення датчиків 5 і 6 до вимірювача 9 величин зазорів /Гриневич Б Ж "Измерительные 8 компенсационно - мостовые устройства с емкостными датчиками", Киев, "Наукова Думка", 1987р/ Вихідний сигнал вимірювача 9 в цифровий двійковий код величини зазору перетворюється аналого - цифровим перетворювачем 10 Запуск і зраховування двійкового коду величини зазору з аналого - цифрового перетворювача 10 здійснюється обчислювачем 11 Обчислювач 11 забезпечує обчислення оцінки величини зазору, що в напрямку вимірюється, і критерію паралельності напрямку переміщення рухомого елемента різцевої голівки осі обертання вала 12 - регулювальні гвинти положення лінійної напрямної 13 - регулювальні гвинти положення різцевої голівки На кресленнях також позначені (див фіг 1-5) 14 - рухомий елемент лінійної напрямної, 15 - пристрій стабілізації положення рухомого елемента лінійної напрямної, 16, 17, 18 - штовхач прямого хода, штовхач зворотного хода та пристрій управління штовхачами, ВІДПОВІДНО, що утворюють кроковий п'єзоелектричний двигун, 19, 20, 21 - різцева голівка, пристрій переміщення рухомого елемента різцевої голівки і рухомий елемент різцевої голівки, ВІДПОВІДНО, 22 - лінійна напрямна, 23 - пристрій переміщення вершини різця по розрахунковій траєкторії, 24 - аеростатична шпиндельна опора, 25 - планшайба, 26 - пристрій стабілізації радіального положення осі обертання вала аеростатичної шпиндельної опори та осьового положення плоскості планшайби, 27 - станина, 28 - віброкомпенсуючі опори, 29 - пристрій поперечного переміщення різцевої ГОЛІВКИ, 30 - стояки Причому, датчики 5 і 6 величин зазорів з'єднані з комутатором 8 датчиків величин зазорів, комутатор 8 датчиків величин зазорів з'єднаний з входом вимірювача 9 величин зазорів, а його вихід з'єднаний з першим входом аналого - цифрового перетворювача 10, перший вихід обчислювача 11 з'єднаний з другим входом аналого - цифрового перетворювача 10, другий вихід обчислювача 11 з'єднаний з третім входом аналого - цифрового перетворювача 10, а його вхід з'єднаний з виходом аналого - цифрового перетворювача 10 Працює пристрій наступним чином Припускається, що пристрій стабілізації положення рухомого елемента лінійної напрямної, стабілізації радіального положення осі обертання вала аеростатичної шпиндельної опори і осьового положення вала цієї опори, пристрій управління штовхачами і пристрій переміщення вершини різця по розрахунковій траєкторії увімкнені і забезпечують працездатність пристрою, що заявляється Поворотом втулки 2 центри основ датчиків 5 і 6 величин зазорів установлюються на пряму, перпендикулярну напрямку переміщення рухомого елемента лінійної напрямної Зміщують рухомий елемент лінійної напрямної (по осі "X" системи 52410 координат XOY, див фіг 1) в початкове положення і різцеву голівку в поперечному напрямку і пристрій 1 позиціонування установлюють так, щоб опорна точка А на поверхні планшайби для вимірювання величин зазорів проходила під центрами основ датчиків 5 і 6 (див фіг 2) Центри основ датчиків 5 і 6 від осі симетрії втулки 2 та опорна точка А поверхні планшайби від осі обертання вала знаходяться на однакових відстанях, рівних "Z " Тому, при суміщенні осі симетрії втулки 2 з віссю обертання вала (в початковому положенні рухомого елемента лінійної напрямної ) точка А буде переміщуватися під центрами основ датчиків 5 і 6 Включають пристрій 7 Поворотом вала опори точку А установлюють під центром основи датчика 5 величини зазору Виконують пуск програми "Оцінка 1" У ВІДПОВІДНОСТІ з алгоритмом роботи цієї програми обчислювач 11 "п" разів запускає аналого - цифровий перетворювач 10, зчитує з його регістра двійковий код величини зазору Zfj/i/ і обчислює асимптотично незміщену оцінку величини цього зазору (4) Переміщують рухомий елемент різцевої голівки, виконують пуски програми "Оцінка 1" і установлюють під датчиком 5 зазор, наприклад, Е = 20мкм Поворотом вала шпиндельної опори точку А установлюють під центром основи датчика 6 величини зазору Комутатором 8 датчик 6 підключають до вимірювача 9 Виконують пуск програми "Оцінка 1" і отримують асимптотично незміщену оцінку величини зазору під датчиком 6 1 п Zn=-EZ0, ,5, Зміщують датчик 6 по висоті зазору в корпусі 4 і, виконуючі пуски програми "Оцінка 1", під датчиком 6 над точкою А планшайби також установлюють величину зазору Z =20мкм Переміщують рухомий елемент лінійної напрямної із початкового положення на відстань "L" (див причинно - наслідковий зв'язок) і поворотом вала шпиндельної опори установлюють точку А під центром основи датчика 5 величини зазору (див фіг 2) Комутатором 8 підключають цей датчик до вимірювача 9 Виконують пуск програми "Оцінка 1" і отримують асимптотично незміщену оцінку величини зазору під датчиком 5 в кінцевому положенні рухомого елемента лінійної напрямної (6) 1=1 Поворотом вала шпиндельної опори точку А установлюють під центр основи датчика 6 і комутатором 8 підключають його до вимірювача 9 Виконують пуск програми "Оцінка 1" і отримують оцінку величини зазору під датчиком 6 (7) л П о р і в н ю ю т ь в е л и ч и н и зазорів с Zfj л с = Z£ л с і Zp і 10 Е Е fi fi Якщо Z n = Z k і Z n = Z k , напрямок переміщення рухомого елемента лінійної напрямної перпендикулярний осі обертання вала аеростатичної шпиндельної опори Якщо ці рівності не виконуються, регулювальними гвинтами 12 змінюють положення лінійної напрямної і методом послідовних наближень досягають виконання цих рівностей і установлюють напрямок переміщення рухомого елемента лінійної напрямної перпендикулярно осі обертання вала аеростатичної шпиндельної опори Наступний етап роботи пристрою - установлення напрямку переміщення рухомого елемента різцевої голівки паралельно осі обертання вала аеростатичної шпиндельної опори Для цього повертають рухомий елемент лінійної напрямної в початкове положення Поворотом вала точку А установлюють під центр основи датчика 5 величини зазору ікомутатором 8 підключають цей датчик до вимірювача 9 Виконують пуск програми "Оцінка 2" У ВІДПОВІДНОСТІ з алгоритмом роботи цієї програми обчислювач 11 обчислює оцінку Z /І/ величини зазору під датчиком 5 і на відміну від програми "Оцінка 1" формує масив величин зазорів під датчиком 5 на дискретах переміщення рухомого елемента лінійної напрямної Оцінка Z /І/ запам'ятовується в пам'яті обчислювача 11 в якості першого елемента масиву величин зазорів під датчиком 5 Поворотом вала шпиндельної опори точку А установлюють під центр основи датчика 6 і комутатором 8 підключають цей датчик до вимірювача 9 Виконують пуск програми "Оцінка 3" Обчислювач 11 обчислює оцінку Z /І/ величини зазору під датчиком 6 та запам'ятовує и в якості першого елемента масиву зазорів під датчиком 6 Рухомий елемент лінійної напрямної із початкового положення переміщують на відстань "т" (див фіг 4) і, також як початковому положенні, виконають пуски програм "Оцінка 2" і "Оцінка З" Отримують другі елементи Z 121 і Z 121 масивів величин зазорів під датчиками 5 і 6 Рухомий елемент лінійної напрямною з інтервалом "т" "п" разів переміщують над плоскістю планшайби На кожному інтервалі переміщення отримують І-ТІ елементи масивів величин зазорів під датчиками 5 і 6 В результаті в пам'яті обчислювача 11 буде сформовано два масиві величин зазорів, ), Z 5 (2), Z 5 (3), , Z 5 (n), (8) ), Z 6 (2), Z 6 (3), , Z6(n) Повертають рухомий елемент лінійної напрямної в початкове положення і установлюють точку А поверхні планшайби під центром основи датчика 5 Переміщують рухомий елемент різцевої голівки в напрямку планшайби на відстань п, наприклад, h = 5мкм Комутатором 8 датчик 5 підключають до вимірювача 9 Виконують пуск програми "Оцінка 4" і отримують перший елемент Zfj /1/ масиву величин зазорів під датчиком 5 після його переміщення 11 52410 по напрямку переміщення рухомого елемента різцевої голівки на відстань h = 5мкм Поворотом вала точку А установлюють під центр основи датчика 6 і комутатором 8 підключають датчик 6 до вимірювача 9 Виконують пуск програми "Оцінка 5" і отримують перший елемент Zh /1/ масиву величин зазорів під датчиком 6 після переміщення рухомого елемента різцевої голівки на відстань h = 5мкм Із початкового положення рухомий елемент лінійної напрямної з інтервалом "т" "п" разів переміщують над плоскістю планшайби На кожному інтервалі переміщення отримують і-ий елемент кожного із масивів величин зазорів під датчиками 5 і 6 В результаті в пам'яті обчислювача 11 будуть сформовані ще два масиви величин зазорів 5 Zh (1), 6 Zg(3), 6 6 Zg(n), 12 паралельно напрямку переміщення рухомого елемента лінійної напрямної Для цього в малій окрузі початкового положення різцевої голівки регулювальними гвинтами 13 положення різцевої голівки, установленими в плоскості, яка перпендикулярна напрямку переміщення рухомого елемента лінійної - напрямної, варіюють положення різцевої голівки На кожному кроку варіації положення різцевої голівки по наведеній вище схемі отримують масив /8/ величин зазорів, отримують масив /9/ величин зазорів, обчислюють критерій паралельності Д Якщо на черговому кроку варіації Д = 0 , напрямок переміщення рухомого елемента різцевої голівки паралельний осі обертання вала Якщо Д Ф 0, різцеву голівку установлюють в положен (9) Zh (1), Zh (2), Zh (3), Zg(n) Виконують пуск програми "Норма" У ВІДПОВІДНОСТІ з алгоритмом роботи цієї програми обчислюються величини зміни зазорів під датчиками 5і 6 AZ5/1/, AZ5/2/, AZ5/3/, , , AZ5/n/Ha дискретах /інтервалах/ переміщення після переміщення рухомого елемента різцевої голівки на відстань п = 5мкм Обчислюється критерій паралельності переміщення рухомого елемента різцевої голівки осі обертання вала як різниця по нормі між величиною h переміщення рухомого елемента різцевої голівки і величинами зміни величин зазорів під датчиками 5 і 6 на дискретах переміщення у ВІДПОВІДНОСТІ з /З/ Якщо Д = 0 , напрямок переміщення рухомого елемента різцевої голівки паралельний осі обертання вала/ Якщо Д Ф 0 , установлення напрямку переміщення рухомого елемента різцевої голівки паралельно осі обертання вала виконується в два етапи На першому етапі напрямок переміщення рухомого елемента установлюють у плоскість, що проходить через ось обертання вала ня, якому відповідає мінімум норми Д = mm і виконують другий етап установлення На другому етапі установлення паралельності варіюють положення різцевої голівки регулювальними гвинтами 13 положення різцевої голівки, установленими в плоскості, яка паралельна напрямку переміщення рухомого елемента напрямної і змінюють положення напрямку переміщення рухомого елемента різцевої голівки в плоскості, яка проходить через ось обертання вала паралельно напрямку переміщення рухомого елемента напрямної Як і на першому етапі установлення паралельності на кожному кроку варіації положення різцевої голівки отримують масиви /8/ і /9/ величин зазорів під датчиками 5 і 6 і обчислюють критерій паралельності Різцеву голівку установлююсь в положення, якому відповідає рівність нулю норми /3/ і установлюють напрямок переміщення рухомого елемента різцевої голівки паралельно осі обертання вала аеростатичної шпиндельної опори суперприцезійного двохкоординатного верстата 13 52410 14 іб Напрямок па^міщаяня Фіг. 2
ДивитисяДодаткова інформація
Назва патенту англійськоюUnit for adjuctment of the position of the linear guide and the cutter head with respect to the axis of rotation of the shaft of aerostatic spindle support of super-precise two-coordinate workbench
Автори англійськоюZinenko Volodymyr Mykolaiovych
Назва патенту російськоюУстройство для юстировки положения линейной направляющей и резцовой головки относительно оси вращения вала аэростатической шпиндельной опоры суперпрецизионного двухкоординатного станка
Автори російськоюЗиненко Владимир Николаевич
МПК / Мітки
МПК: B23B 41/00
Мітки: опори, положення, обертання, напрямної, шпиндельної, осі, головки, верстата, відносної, юстирування, лінійної, двокоординатного, різцевої, аеростатичної, пристрій, вала, суперпрецизійного
Код посилання
<a href="https://ua.patents.su/7-52410-pristrijj-dlya-yustiruvannya-polozhennya-linijjno-napryamno-i-rizcevo-golovki-vidnosno-osi-obertannya-vala-aerostatichno-shpindelno-opori-superprecizijjnogo-dvokoordinatnogo-versta.html" target="_blank" rel="follow" title="База патентів України">Пристрій для юстирування положення лінійної напрямної і різцевої головки відносно осі обертання вала аеростатичної шпиндельної опори суперпрецизійного двокоординатного верстата</a>
Пристрій суміщення вершини алмазного різця з віссю обертання вала аеростатичної шпиндельної опори
Номер патенту: 36956
Опубліковано: 16.04.2001
Автори: Зіненко Володимир Миколайович, Шепелєв Анатолій Олександрович
МПК: B23B 25/00
Мітки: пристрій, опори, суміщення, віссю, алмазного, шпиндельної, вершини, аеростатичної, обертання, різця, вала
Текст:
...такій величині зміщення зміною відстані між плоским провідником 9 і вершиною 13 голки можно нехтувати. Тому вершина 13 і плоский провідник 9 у еквівалентній схемі вважаються нерухомими. Тоді рухомим елементом у еквівалентній схемі вважається алмазний різець (кристал алмаза). Причому, точки задньої грані 15 різця в силу близкості до вершини 13 лежать в області сильного електричної о поля. Отже навіть незначна зміна відстані між точкою на...
Пристрій для установки осі обертання вала шпиндельної опори перпендикулярно оброблюваній плоскій поверхні
Номер патенту: 52409
Опубліковано: 16.12.2002
Автор: Зіненко Володимир Миколайович
МПК: B23B 41/00
Мітки: оброблюваній, плоский, вала, опори, поверхні, осі, шпиндельної, обертання, установки, перпендикулярно, пристрій
Формула / Реферат:
Пристрій для установки осі обертання вала шпиндельної опори перпендикулярно оброблювальній плоскій поверхні, який включає регулювальні гвинти для зміни положення шпиндельної опори, який відрізняється тим, що він обладнаний пристроєм обертання датчика величини проміжку, який включає втулку, до якої шарнірно з можливістю повороту у вертикальній площині прикріплений кронштейн, в кронштейні з можливістю повороту у вертикальній площині, яка...
Пристрій стабілізації осьового положення площини планшайби аеростатичної шпиндельної опори
Номер патенту: 51488
Опубліковано: 15.11.2002
Автор: Зіненко Володимир Миколайович
МПК: F16C 32/06
Мітки: положення, площині, осьового, шпиндельної, пристрій, планшайби, аеростатичної, опори, стабілізації
Формула / Реферат:
Пристрій стабілізації осьового положення площини планшайби аеростатичної шпиндельної опори, який включає компенсатори осьового зміщення вала, датчик величини регульованого зазору, вимірювач величини регульованого зазору, диференційний підсилювач, підсилювачі, який відрізняється тим, що в порожнині вала аеростатичної шпиндельної опори установлений вимірювальний стрижень, причому згаданий вимірювальний стрижень прикріплений до внутрішньої...
Пристрій суміщення нижньої точки шліфувального круга з дугоподібною шліфувальною поверхнею з віссю обертання вала шпиндельної опори
Номер патенту: 36959
Опубліковано: 16.04.2001
Автори: Зіненко Володимир Миколайович, Шепелєв Анатолій Олександрович
МПК: B23Q 17/00
Мітки: круга, точки, дугоподібною, обертання, шпиндельної, пристрій, нижньої, опори, віссю, суміщення, вала, шліфувального, поверхнею, шліфувальною
Текст:
...обмежувач 13 зворотного переміщення рухомої пластини 4. Обмежувач 13 зворотного переміщення призначений для обмеження величини переміщення ру 2 36959 хомої пластини 4 електромагнітом 14, зв'язаним з нею пружиною 15. Це обмежує величину деформації плоскої пружини 11, а отже, обмежує величину її залишкової деформації. Зміщення рухомої пластини 4 електромагнітом 14 необхідно для її відведення від п'єзоелемента 10. У результаті випрямлення...
Пристрій компенсації гіроскопічного моменту обертового елемента, наприклад, вала аеростатичної шпиндельної опори
Номер патенту: 25540
Опубліковано: 30.10.1998
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович
МПК: F16C 32/06
Мітки: елемента, моменту, наприклад, пристрій, компенсації, вала, опори, аеростатичної, обертового, гіроскопічного, шпиндельної
Формула / Реферат:
1. Устройство компенсации гироскопического момента вращающегося элемента, например, вала аэростатической шпиндельной опоры, содержащее датчики величины смещения оси вращающегося элемента по оси "X" и по оси "Y", измерители величины смещения оси вращения вращающегося элемента по оси "X" и по оси "Y", объединенные в группы по меньшей мере из двух, регуляторы давления, образующие компенсаторы смещения оси...
Попередній патент: Пристрій для установки осі обертання вала шпиндельної опори перпендикулярно оброблюваній плоскій поверхні
Наступний патент: Спосіб профілактики лімфокіст у хворих в пізньому післяопераційному періоді після операції розширеної екстирпації матки
Випадковий патент: Спосіб подачі мастила в зону тертя між контактним дротом та струмознімним елементом