Спосіб контролю горизонту при розробці родовища та пристрій для його здійснення, спосіб ідентифікації структури корисної копалини та пристрій для його здійснення
Номер патенту: 89535
Опубліковано: 10.02.2010
Автори: Келлі Майкл Шоун, Хейнсворт Девід Уільям, Релстон Джонатон Кері, Харгрейв Чад Оуен, Макфі Рональд Джон, Райд Девід Чарльз
Формула / Реферат
1. Спосіб контролю горизонту при розробці родовища, де видобуту копалину вирубають з очисного забою пласта породи, у якому:
вирубають копалину з пласта врубовим пристроєм, що оголює свіжу поверхню після вирубування копалини,
спостерігають інфрачервоне випромінювання свіжої поверхні після вирубування копалини у місці безпосередньо біля врубового пристрою,
визначають будь-яку ділянку температурного контрасту від дослідження інфрачервоного випромінювання між верхньою границею спостереження та нижньою границею спостереження,
визначають щонайменше одну координату по висоті щонайменше однієї ділянки температурного контрасту і генерують вихідний сигнал, який вказує визначену координату по висоті так, що генерований вихідний сигнал використовують як первинну координату для контролю горизонту.
2. Спосіб за п. 1, який відрізняється тим, що застосовують фільтр порогової величини до визначеної ділянки температурного контрасту і генерують вихідний сигнал, який вказує визначену координату по висоті тільки, якщо температура ділянки температурного контрасту перевищує порогову величину.
3. Спосіб за п. 1, який відрізняється тим, що зону спостереження інфрачервоного випромінювання визначають ординатою вихідного положення, яка проходить у вертикальному напрямі вгору та вниз по висоті досліджуваної ділянки інфрачервоного випромінювання, і у якому принаймні одна ділянка температурного контрасту з дослідження інфрачервоного випромінювання визначається ординатою вихідного положення.
4. Спосіб за п. 3, який відрізняється тим, що спостереження здійснюють цифровою камерою, і первинну координату визначають по спеціальних розміщеннях пікселів на цифровому зображенні, одержаному від згаданої камери.
5. Спосіб за п. 4, який відрізняється тим, що ділянки температурного контрасту визначають реєстрацією максимуму серед значень інтенсивності сірих пікселів по відношенню до багатьох пікселів на ординаті вихідного положення в цифровому зображенні, яка простягається вгору і вниз по висоті досліджуваної ділянки.
6. Спосіб за п. 1, який відрізняється тим, що вихідний сигнал, який вказує координату по висоті, є сигналом, який містить координати, що визначають положення принаймні однієї ділянки температурного контрасту в двовимірній системі координат.
7. Спосіб за п. 1, який відрізняється тим, що подають вихідний сигнал, координати положення по висоті до кола управління положенням врубового пристрою гірничого комбайна і контролюють положення врубового пристрою у гірничому комбайні за допомогою згаданого вихідного сигналу положення.
8. Спосіб за п. 7, який відрізняється тим, що досліджувана ділянка для інфрачервоного випромінювання визначається ординатою вихідного положення, яка проходить вертикально вгору та вниз по висоті досліджуваної ділянки, і щонайменше одну ділянку температурного контрасту з дослідження інфрачервоного випромінювання визначають на ординаті вихідного положення,
результати спостереження цифрового зображення та первинну координату визначають по спеціальних розташуваннях пікселів в цифровому зображенні, і
щонайменше одну ділянку температурного контрасту визначають реєстрацією максимуму серед величин інтенсивності сірих пікселів серед багатьох пікселів на ординаті вихідного положення на цифровому зображенні.
9. Спосіб за п. 1, який відрізняється тим, що візуально спостерігають інфрачервоне випромінювання від свіжої поверхні підрубленого забою копалини, реєструють другу ділянку температурного контрасту, головним чином, в місці перетину вертикального врубу стінки пласта копалини і горизонтального врубу забою покрівлі та/або підошви пласта копалини,
визначають координату по висоті другої температурної ділянки для визначення координат покрівлі та/або підошви пласта копалини,
генерують другий вихідний сигнал визначеної координати положення по висоті другої ділянки температурного контрасту так, що другий вихідний сигнал використовують із згаданим першим вихідним сигналом для контролю горизонту.
10. Спосіб за п. 9, який відрізняється тим, що результатом спостереження другої ділянки температурного контрасту є цифрове зображення другої досліджуваної ділянки, у якому значення інтенсивності сірих пікселів у цифровому зображенні другої досліджуваної ділянки усереднюється, і реєструють нижню та/або верхню границю для розробки пласта копалини при зміні середнього значення інтенсивності пікселів на більшу величину інтенсивності пікселів, ніж при вирубанні тільки копалини з пласта.
11. Спосіб за п. 10, який відрізняється тим, що досліджувана ділянка інфрачервоного випромінювання визначається ординатою вихідного положення, яка проходить вертикально вгору та вниз по висоті досліджуваної ділянки, і щонайменше одна ділянка температурного контрасту з дослідження інфрачервоного випромінювання визначається на ординаті вихідного положення, причому спостереження здійснюють тепловою інфрачервоною камерою, а первинну координату задають спеціальним розташуванням пікселів на цифровому зображенні, одержаному таким чином, і щонайменше одну ділянку температурного контрасту визначають реєстрацією максимуму серед значень інтенсивності сірих пікселів серед багатьох пікселів на ординаті вихідного положення в цифровому зображенні, що проходить вгору і вниз по висоті зони спостереження.
12. Спосіб за п. 6, який відрізняється тим, що спостереження положення інфрачервоного випромінювання здійснюють в багатьох місцях на свіжій поверхні забою копалини при переміщенні врубового пристрою впоперек забою проходки, а численні ділянки температурного контрасту визначають в множині цих місць, причому застосовують фільтр "робастного стеження" до множини ділянок температурного контрасту для мінімізації похибок, які за інших умов можуть спричинятися низькими рівнями температурного контрасту.
13. Вимірювальний пристрій для роботи з пристроєм для контролю горизонту гірничого комбайна, що містить:
блок прийому та накопичення зображень для приймання сигналів інфрачервоного зображення досліджуваного положення свіжої поверхні підрубаного забою копалини безпосередньо біля врубового пристрою гірничого комбайна,
блок обробки сигналу для обробки прийнятих сигналів інфрачервоного зображення для визначення щонайменше однієї ділянки температурного контрасту між верхньою частиною зображення та нижньою частиною зображення,
блок визначення положення по висоті для приймання інформації щодо будь-якої ділянки температурного контрасту, обробленої блоком обробки сигналу, і для обрахунку положення по висоті на щонайменше одній зареєстрованій ділянці температурного контрасту, і
блок формування сигналу для подачі вихідного сигналу, який вказує обраховане положення по висоті для пристрою для контролю горизонту гірничого комбайна.
14. Вимірювальний пристрій за п. 13, який відрізняється тим, що блок для обробки сигналу містить пороговий фільтр для зареєстрованої ділянки температурного контрасту, а блок формування вихідних сигналів виконано з можливістю генерування вихідного сигналу, який вказує визначене положення по висоті тільки за умови, що температура ділянки температурного контрасту перевищує порогове значення.
15. Вимірювальний пристрій за п. 13, який відрізняється тим, що блок обробки сигналу виконано з можливістю переконфігурування для забезпечення досліджуваної ділянки інфрачервоного випромінювання з ординатою вихідного положення, яка проходить вертикально вгору та вниз по висоті досліджуваної ділянки, і щонайменше одна ділянка температурного контрасту, оброблена блоком положення по висоті, визначена на ординаті вихідного положення.
16. Вимірювальний пристрій за п. 15, який відрізняється тим, що результатом спостереження є цифрове зображення, причому положення первинної координати задано в згаданому блоці обробки сигналу по спеціальних розташуваннях пікселів в цифровому зображенні.
17. Вимірювальний пристрій за п. 16, який відрізняється тим, що блок обробки сигналу виконано з можливістю переконфігурування для визначення ділянки температурного контрасту шляхом реєстрації максимуму серед значень інтенсивності сірих пікселів серед багатьох пікселів на ординаті вихідного положення в цифровому зображенні, яка проходить вгору і вниз по висоті досліджуваної ділянки.
18. Вимірювальний пристрій за п. 13, який відрізняється тим, що блок формування вихідного сигналу виконано з можливістю генерування сигналу, який вказує координату положення по висоті і є сигналом, що задає положення ділянки температурного контрасту у двовимірній системі координат.
19. Вимірювальний пристрій за п. 13, який відрізняється тим, що пристрій для контролю положення врубового пристрою гірничого комбайна виконано з можливістю приймання вихідного сигналу, який надсилається до нього і вказує координату по висоті, з наданням можливості контролю горизонтального положення врубового пристрою гірничого комбайна за допомогою згаданого сигналу.
20. Вимірювальний пристрій за п. 19, який відрізняється тим, що
блок обробки сигналу виконано з можливістю переконфігурації для забезпечення досліджуваної ділянки для спостереження інфрачервоного випромінювання, що має ординату вихідного положення, яка проходить вертикально вгору та вниз по висоті зони спостереження інфрачервоного випромінювання, і щонайменше одна ділянка температурного контрасту визначається по координаті вихідного положення,
пристрій має теплову інфрачервону камеру для спостереження, причому положення первинної координати задається по спеціальних розташуваннях пікселів в цифровому зображенні, одержаному з неї,
пристрій виконано з можливістю визначення ділянки температурного контрасту реєстрацією максимуму серед значень інтенсивності сірих пікселів серед багатьох пікселів на ординаті вихідного положення у цифровому зображенні, яка проходить вгору і вниз по висоті досліджуваної ділянки.
21. Вимірювальний пристрій за п. 13, який відрізняється тим, що
блок прийому та накопичення зображень виконано з можливістю приймання додаткових сигналів інфрачервоного зображення свіжої поверхні підрубаного забою копалини головним чином в місці перетину вертикальної поверхні стінки врубу пласта та горизонтальної поверхні врубу покрівлі і/або підошви пласта і
блок обробки сигналів виконано з можливістю обробки додаткових сигналів інфрачервоного зображення для реєстрації будь-якої ділянки температурного контрасту в місці перетину вертикальної поверхні врубу і кожної або обох горизонтальних поверхонь врубу покрівлі або підошви,
блок визначення висоти виконано з можливістю визначення координати по висоті ділянки температурного контрасту для визначення координат покрівлі і/або підошви пласта копалини,
блок формування вихідного сигналу виконано з можливістю генерування другого вихідного сигналу, який вказує визначену координату положення по висоті ділянки температурного контрасту в місці перетину, і з можливістю використовуватися із згаданим вихідним сигналом для контролю горизонту.
22. Вимірювальний пристрій за п. 21, який відрізняється тим, що
теплова інфрачервона камера виконана з можливістю спостереження для визначення другої ділянки температурного контрасту і
блок положення по висоті виконано з можливістю усереднення значень інтенсивності сірих пікселів в цифровому зображенні і реєстрації нижньої та/або верхньої границі для розробки пласта копалини, якщо величина середньої інтенсивності змінюється на більшу величину середньої інтенсивності пікселів, ніж та, при якій тільки копалину підрубують з пласта.
23. Вимірювальний пристрій за п. 22, який відрізняється тим, що блок обробки сигналу виконано з можливістю надання інформації про положення на ординаті вихідного положення, яка проходить вертикально вгору та вниз по висоті досліджуваної ділянки інфрачервоного випромінювання, і
ділянку температурного контрасту визначено блоком обробки сигналу на ординаті вихідного положення, яка визначається по спеціальних розміщеннях пікселів в цифровому зображенні, одержаному від теплової інфрачервоної камери, причому
принаймні одна ділянка температурного контрасту визначається реєстрацією максимуму серед значень інтенсивності сірих пікселів серед багатьох пікселів на ординаті вихідного положення в цифровому зображенні, яка проходить вгору і вниз по висоті досліджуваної ділянки.
24. Вимірювальний пристрій за п. 18, який відрізняється тим, що він виконаний з можливістю спостереження положення інфрачервоного випромінювання в багатьох місцях на свіжій поверхні підрубаної копалини при переміщенні врубового пристрою по видобувній поверхні, і визначення багатьох ділянок температурного контрасту з вказаної множини положень, причому блок обробки сигналу виконано з можливістю застосування фільтра "робастного стеження" до багатьох ділянок температурного контрасту для мінімізації похибок, що в противному випадку можуть спричинятися низькими рівнями температурного контрасту.
25. Пристрій за п. 13, який відрізняється тим, що виконаний з можливістю з’єднання з пристроєм для контролю горизонтального положення гірничого комбайна.
26. Спосіб ідентифікації по температурі структури в копалині, видобутій з забою при розробці родовища, де врубовий пристрій підрубує копалину і оголює свіжу поверхню після вирубання копалини, в якому
спостерігають інфрачервоне випромінювання свіжої поверхні після підрубування копалини безпосередньо біля врубового пристрою,
реєструють щонайменше одну ділянку температурного контрасту з дослідження інфрачервоного випромінювання і
визначають структуру у видобутій копалині або по розміру принаймні однієї ділянки температурного контрасту, або по температурі ділянки температурного контрасту, яка перевищує температурний поріг.
27. Спосіб за п. 26, який відрізняється тим, що досліджувану ділянку щодо інфрачервоного випромінювання визначають ординатою вихідного положення, яка проходить вертикально вгору та вниз по висоті досліджуваної ділянки, причому розмір ділянки температурного контрасту визначають на ординаті вихідного положення.
28. Спосіб за п. 26, який відрізняється тим, що досліджувану ділянку для інфрачервоного випромінювання визначають ординатою вихідного положення, яка проходить вертикально вгору і вниз по висоті досліджуваної ділянки, і щонайменше одну ділянку температурного контрасту визначають на ординаті вихідного положення,
спостереження здійснюють тепловою інфрачервоною камерою, а положення первинної координати задають по спеціальних розташуваннях пікселів в цифровому зображенні на досліджуваній ділянці, і щонайменше одну ділянку температурного контрасту визначають реєстрацією максимуму серед значень інтенсивностей сірих пікселів серед множини пікселів на ординаті вихідного положення в цифровому зображенні, яка проходить вгору та вниз по висоті досліджуваної ділянки.
29. Спосіб за п. 26, який відрізняється тим, що досліджувану ділянку інфрачервоного випромінювання визначають ординатою вихідного положення, яка проходить вертикально вгору та вниз по висоті досліджуваної ділянки, і щонайменше одну ділянку температурного контрасту визначають із спостереження інфрачервоного випромінювання на ординаті вихідного положення,
спостереження здійснюють тепловою інфрачервоною камерою, а первинну координату визначають по спеціальних розміщеннях пікселів в цифровому зображенні, одержаному з неї,
щонайменше одну ділянку температурного контрасту визначають реєстрацією максимуму серед значень інтенсивності сірих пікселів серед багатьох пікселів на ординаті вихідного положення в цифровому зображенні, яка проходить вгору і вниз по висоті досліджуваної ділянки.
30. Пристрій для ідентифікації по температурі структури копалини при видобутку її з шахти, що містить
блок прийому зображень для приймання сигналів інфрачервоного зображення положення свіжої оголеної поверхні після вирубання копалини безпосередньо біля врубового пристрою гірничого комбайна, що виконаний з можливістю вирубання копалини,
блок обробки сигналу для обробки прийнятих сигналів інфрачервоного зображення для визначення щонайменше однієї ділянки температурного контрасту,
блок обробки зображення для ідентифікації по температурі структури видобутої копалини шляхом реєстрації розміру щонайменше однієї ділянки температурного контрасту, або реєстрації значення температури щонайменше однієї ділянки температурного контрасту, яка вище за порогове значення температури, і
блок формування вихідного сигналу для створення вихідного сигналу, який визначає структуру з можливістю ідентифікації по температурі в копалині.
Текст
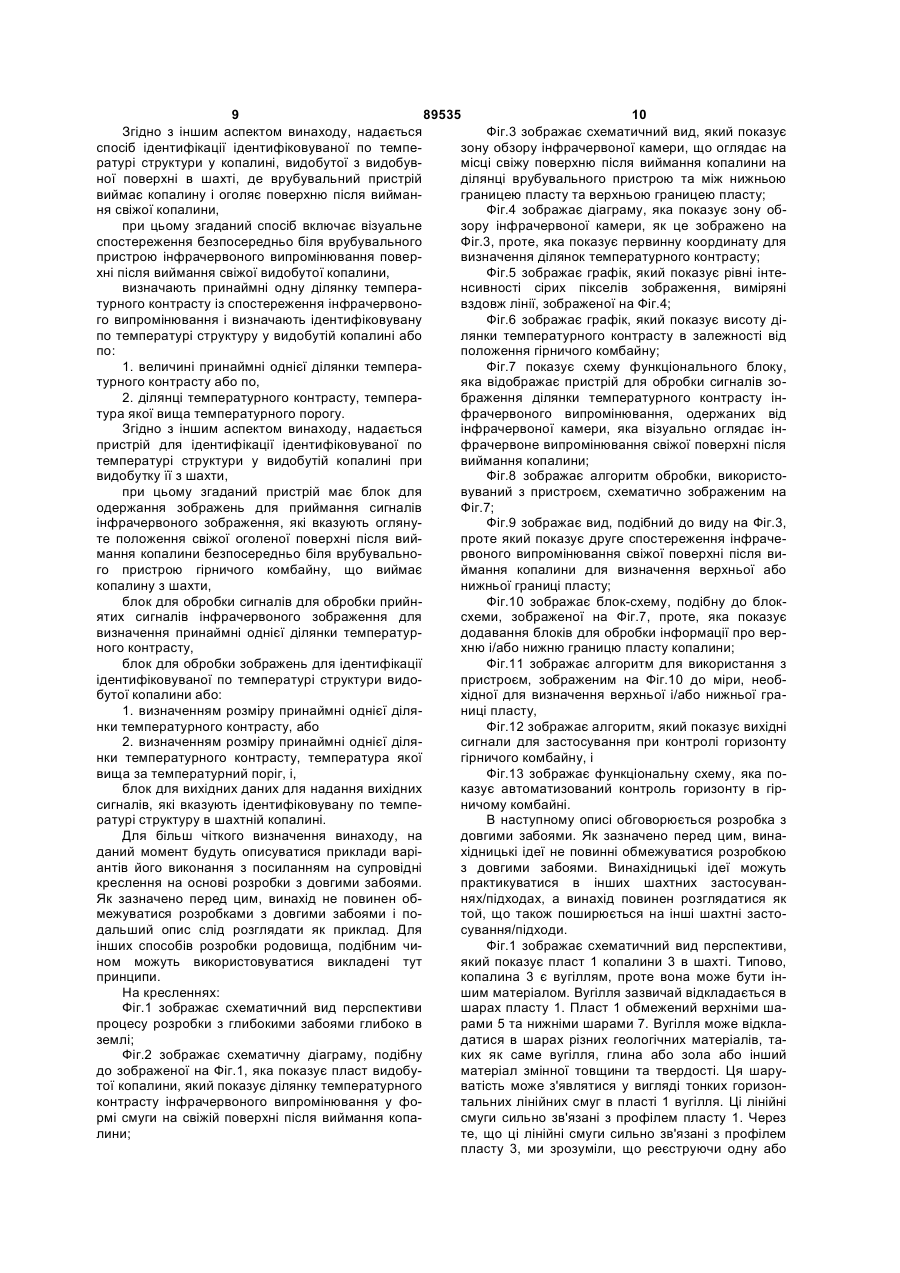
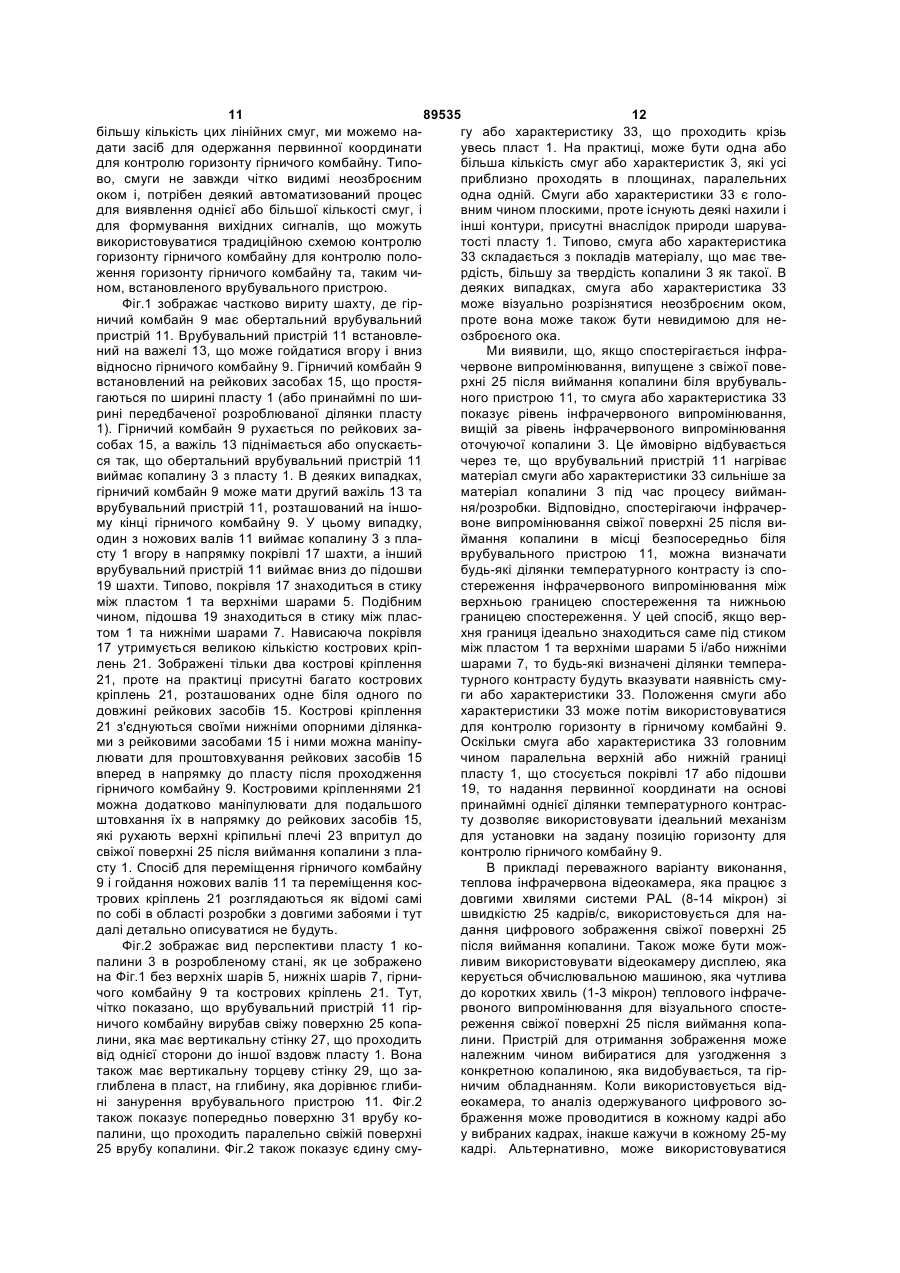
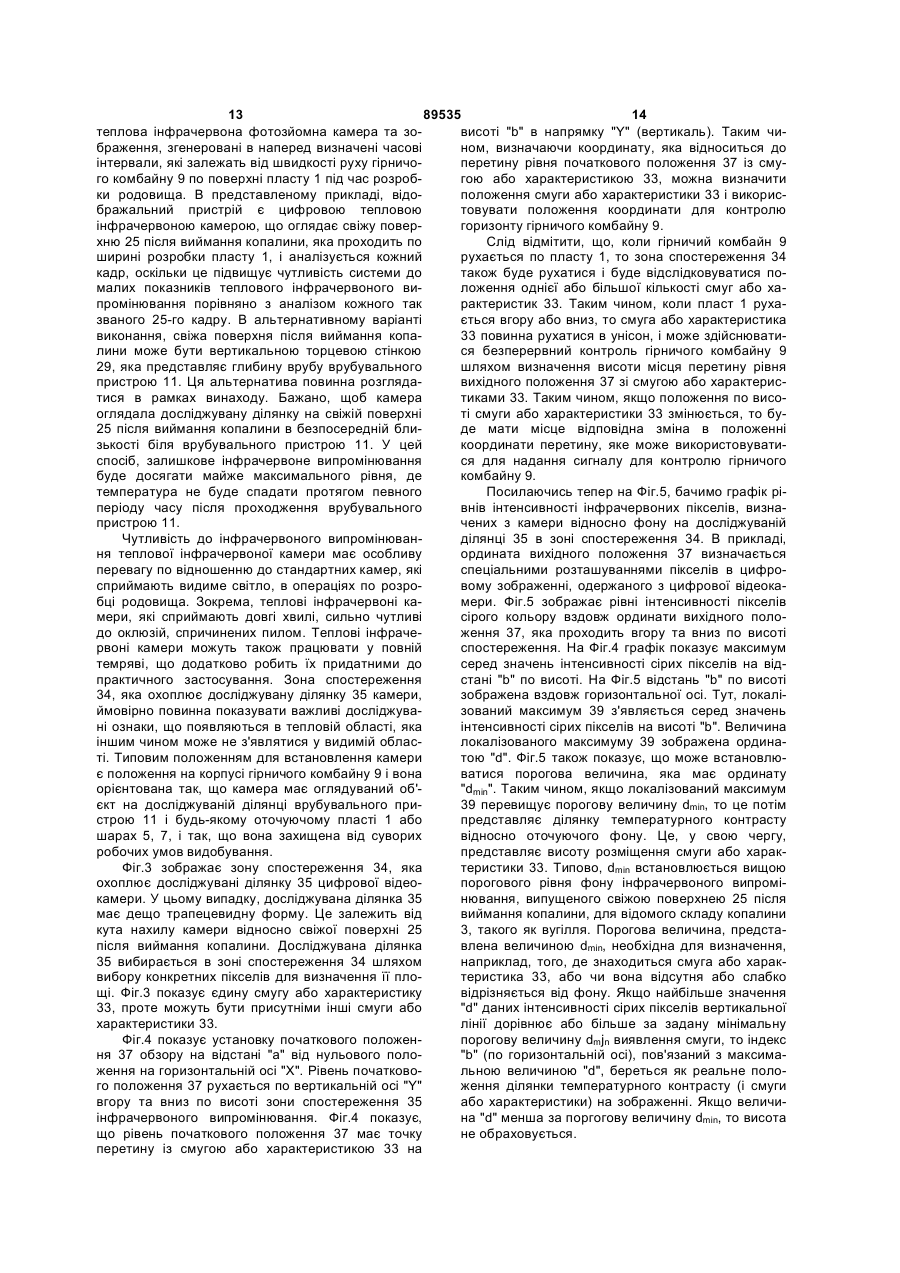
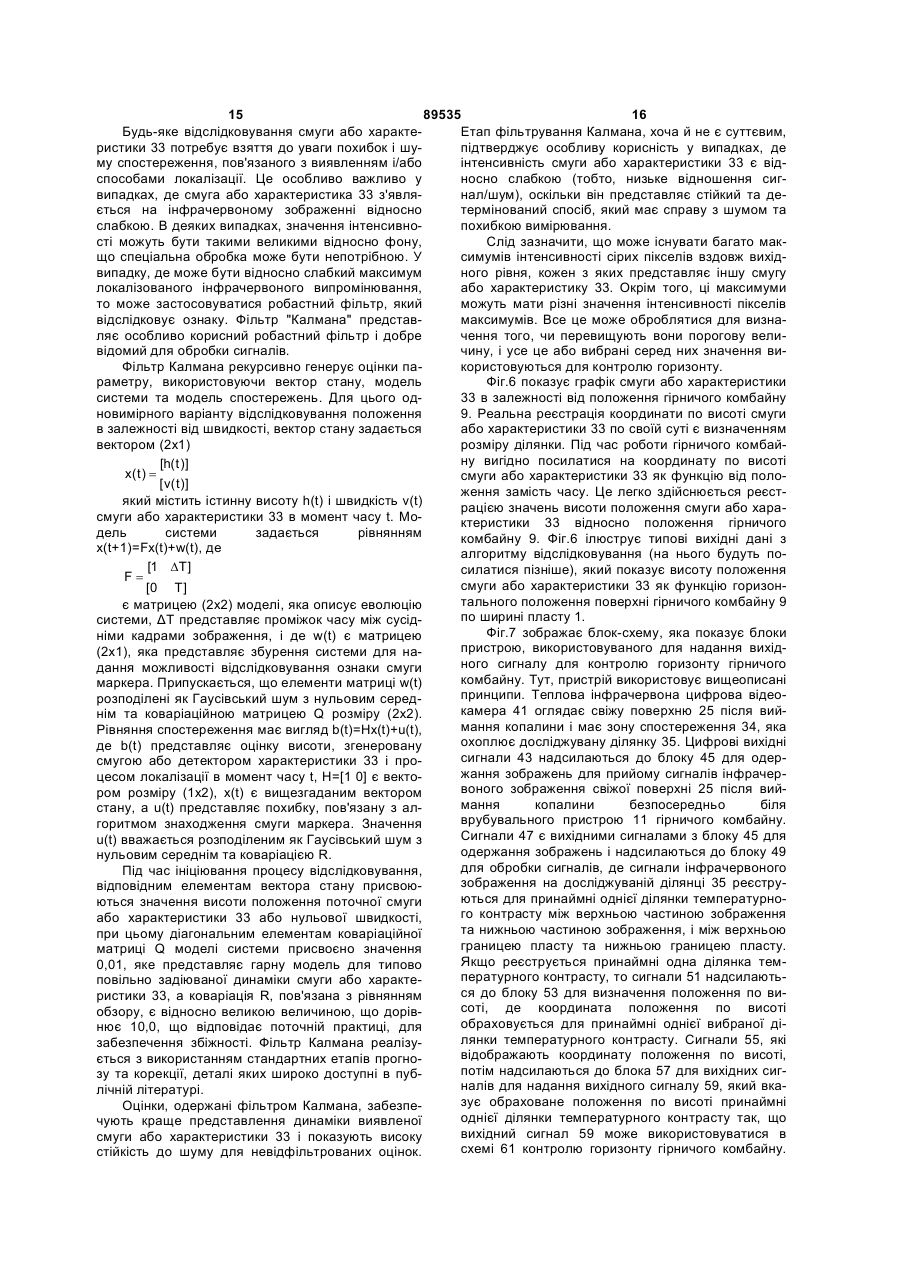
1. Спосіб контролю горизонту при розробці родовища, де видобуту копалину вирубають з очисного забою пласта породи, у якому: вирубають копалину з пласта врубовим пристроєм, що оголює свіжу поверхню після вирубування копалини, спостерігають інфрачервоне випромінювання свіжої поверхні після вирубування копалини у місці безпосередньо біля врубового пристрою, визначають будь-яку ділянку температурного контрасту від дослідження інфрачервоного випромінювання між верхньою границею спостереження та нижньою границею спостереження, визначають щонайменше одну координату по висоті щонайменше однієї ділянки температурного контрасту і генерують вихідний сигнал, який вказує визначену координату по висоті так, що генерований вихідний сигнал використовують як первинну координату для контролю горизонту. 2. Спосіб за п. 1, який відрізняється тим, що застосовують фільтр порогової величини до визначеної ділянки температурного контрасту і генерують вихідний сигнал, який вказує визначену координату по висоті тільки, якщо температура ділянки температурного контрасту перевищує порогову величину. 3. Спосіб за п. 1, який відрізняється тим, що зону спостереження інфрачервоного випромінювання визначають ординатою вихідного положення, яка проходить у вертикальному напрямі вгору та вниз по висоті досліджуваної ділянки інфрачервоного 2 (19) 1 3 89535 4 9. Спосіб за п. 1, який відрізняється тим, що візуту між верхньою частиною зображення та нижньою ально спостерігають інфрачервоне випромінюванчастиною зображення, блок визначення положення від свіжої поверхні підрубленого забою копалиня по висоті для приймання інформації щодо будьни, реєструють другу ділянку температурного якої ділянки температурного контрасту, оброблеконтрасту, головним чином, в місці перетину верної блоком обробки сигналу, і для обрахунку потикального врубу стінки пласта копалини і горизоложення по висоті на щонайменше одній зареєстнтального врубу забою покрівлі та/або підошви рованій ділянці температурного контрасту, і блок пласта копалини, визначають координату по висоті формування сигналу для подачі вихідного сигналу, другої температурної ділянки для визначення коякий вказує обраховане положення по висоті для ординат покрівлі та/або підошви пласта копалини, пристрою для контролю горизонту гірничого комгенерують другий вихідний сигнал визначеної кобайна. ординати положення по висоті другої ділянки тем14. Вимірювальний пристрій за п. 13, який відрізпературного контрасту так, що другий вихідний няється тим, що блок для обробки сигналу міссигнал використовують із згаданим першим вихідтить пороговий фільтр для зареєстрованої ділянки ним сигналом для контролю горизонту. температурного контрасту, а блок формування 10. Спосіб за п. 9, який відрізняється тим, що вихідних сигналів виконано з можливістю генерурезультатом спостереження другої ділянки темпевання вихідного сигналу, який вказує визначене ратурного контрасту є цифрове зображення другої положення по висоті тільки за умови, що темперадосліджуваної ділянки, у якому значення інтенсивтура ділянки температурного контрасту перевищує ності сірих пікселів у цифровому зображенні другої порогове значення. досліджуваної ділянки усереднюється, і реєстру15. Вимірювальний пристрій за п. 13, який відрізють нижню та/або верхню границю для розробки няється тим, що блок обробки сигналу виконано з пласта копалини при зміні середнього значення можливістю переконфігурування для забезпеченінтенсивності пікселів на більшу величину інтенсиня досліджуваної ділянки інфрачервоного випровності пікселів, ніж при вирубанні тільки копалини з мінювання з ординатою вихідного положення, яка пласта. проходить вертикально вгору та вниз по висоті 11. Спосіб за п. 10, який відрізняється тим, що досліджуваної ділянки, і щонайменше одна діляндосліджувана ділянка інфрачервоного випромінюка температурного контрасту, оброблена блоком вання визначається ординатою вихідного полоположення по висоті, визначена на ординаті вихідження, яка проходить вертикально вгору та вниз ного положення. по висоті досліджуваної ділянки, і щонайменше 16. Вимірювальний пристрій за п. 15, який відрізодна ділянка температурного контрасту з досліняється тим, що результатом спостереження є дження інфрачервоного випромінювання визначацифрове зображення, причому положення перється на ординаті вихідного положення, причому винної координати задано в згаданому блоці обспостереження здійснюють тепловою інфрачерворобки сигналу по спеціальних розташуваннях пікною камерою, а первинну координату задають селів в цифровому зображенні. спеціальним розташуванням пікселів на цифрово17. Вимірювальний пристрій за п. 16, який відрізму зображенні, одержаному таким чином, і щоняється тим, що блок обробки сигналу виконано з найменше одну ділянку температурного контрасту можливістю переконфігурування для визначення визначають реєстрацією максимуму серед значень ділянки температурного контрасту шляхом реєстінтенсивності сірих пікселів серед багатьох піксерації максимуму серед значень інтенсивності сірих лів на ординаті вихідного положення в цифровому пікселів серед багатьох пікселів на ординаті вихідзображенні, що проходить вгору і вниз по висоті ного положення в цифровому зображенні, яка прозони спостереження. ходить вгору і вниз по висоті досліджуваної ділян12. Спосіб за п. 6, який відрізняється тим, що ки. спостереження положення інфрачервоного випро18. Вимірювальний пристрій за п. 13, який відрізмінювання здійснюють в багатьох місцях на свіжій няється тим, що блок формування вихідного сигповерхні забою копалини при переміщенні врубоналу виконано з можливістю генерування сигналу, вого пристрою впоперек забою проходки, а чисякий вказує координату положення по висоті і є ленні ділянки температурного контрасту визначасигналом, що задає положення ділянки темперають в множині цих місць, причому застосовують турного контрасту у двовимірній системі коордифільтр "робастного стеження" до множини ділянок нат. температурного контрасту для мінімізації похибок, 19. Вимірювальний пристрій за п. 13, який відрізякі за інших умов можуть спричинятися низькими няється тим, що пристрій для контролю положенрівнями температурного контрасту. ня врубового пристрою гірничого комбайна вико13. Вимірювальний пристрій для роботи з принано з можливістю приймання вихідного сигналу, строєм для контролю горизонту гірничого комбайякий надсилається до нього і вказує координату по на, що містить: висоті, з наданням можливості контролю горизонблок прийому та накопичення зображень для притального положення врубового пристрою гірничого ймання сигналів інфрачервоного зображення докомбайна за допомогою згаданого сигналу. сліджуваного положення свіжої поверхні підруба20. Вимірювальний пристрій за п. 19, який відрізного забою копалини безпосередньо біля няється тим, що блок обробки сигналу виконано з врубового пристрою гірничого комбайна, блок обможливістю переконфігурації для забезпечення робки сигналу для обробки прийнятих сигналів досліджуваної ділянки для спостереження інфрачервоного зображення для визначення щоінфрачервоного випромінювання, що має ординанайменше однієї ділянки температурного контрасту вихідного положення, яка проходить вертикаль 5 89535 6 но вгору та вниз по висоті зони спостереження зображенні, яка проходить вгору і вниз по висоті інфрачервоного випромінювання, і щонайменше досліджуваної ділянки. одна ділянка температурного контрасту 24. Вимірювальний пристрій за п. 18, який відрізвизначається по координаті вихідного положення, няється тим, що він виконаний з можливістю спопристрій має теплову інфрачервону камеру для стереження положення інфрачервоного випроміспостереження, причому положення первинної нювання в багатьох місцях на свіжій поверхні координати задається по спеціальних розташупідрубаної копалини при переміщенні врубового ваннях пікселів в цифровому зображенні, одержапристрою по видобувній поверхні, і визначення ному з неї, пристрій виконано з можливістю визнабагатьох ділянок температурного контрасту з вкачення ділянки температурного контрасту заної множини положень, причому блок обробки реєстрацією максимуму серед значень інтенсивсигналу виконано з можливістю застосування фіності сірих пікселів серед багатьох пікселів на орльтра "робастного стеження" до багатьох ділянок динаті вихідного положення у цифровому зобратемпературного контрасту для мінімізації похибок, женні, яка проходить вгору і вниз по висоті що в противному випадку можуть спричинятися досліджуваної ділянки. низькими рівнями температурного контрасту. 21. Вимірювальний пристрій за п. 13, який відріз25. Пристрій за п. 13, який відрізняється тим, що няється тим, що блок прийому та накопичення виконаний з можливістю з’єднання з пристроєм зображень виконано з можливістю приймання додля контролю горизонтального положення гірничодаткових сигналів інфрачервоного зображення го комбайна. свіжої поверхні підрубаного забою копалини голо26. Спосіб ідентифікації по температурі структури вним чином в місці перетину вертикальної поверхв копалині, видобутій з забою при розробці родоні стінки врубу пласта та горизонтальної поверхні вища, де врубовий пристрій підрубує копалину і врубу покрівлі і/або підошви пласта і блок обробки оголює свіжу поверхню після вирубання копалини, сигналів виконано з можливістю обробки додатков якому спостерігають інфрачервоне випромінювих сигналів інфрачервоного зображення для ревання свіжої поверхні після підрубування копалини єстрації будь-якої ділянки температурного контрабезпосередньо біля врубового пристрою, реєстсту в місці перетину вертикальної поверхні врубу і рують щонайменше одну ділянку температурного кожної або обох горизонтальних поверхонь врубу контрасту з дослідження інфрачервоного випроміпокрівлі або підошви, блок визначення висоти винювання і визначають структуру у видобутій копаконано з можливістю визначення координати по лині або по розміру принаймні однієї ділянки темвисоті ділянки температурного контрасту для випературного контрасту, або по температурі ділянки значення координат покрівлі і/або підошви пласта температурного контрасту, яка перевищує темпекопалини, блок формування вихідного сигналу ратурний поріг. виконано з можливістю генерування другого вихід27. Спосіб за п. 26, який відрізняється тим, що ного сигналу, який вказує визначену координату досліджувану ділянку щодо інфрачервоного виположення по висоті ділянки температурного контпромінювання визначають ординатою вихідного расту в місці перетину, і з можливістю використоположення, яка проходить вертикально вгору та вуватися із згаданим вихідним сигналом для контвниз по висоті досліджуваної ділянки, причому ролю горизонту. розмір ділянки температурного контрасту визна22. Вимірювальний пристрій за п. 21, який відрізчають на ординаті вихідного положення. няється тим, що теплова інфрачервона камера 28. Спосіб за п. 26, який відрізняється тим, що виконана з можливістю спостереження для визнадосліджувану ділянку для інфрачервоного випрочення другої ділянки температурного контрасту і мінювання визначають ординатою вихідного поблок положення по висоті виконано з можливістю ложення, яка проходить вертикально вгору і вниз усереднення значень інтенсивності сірих пікселів в по висоті досліджуваної ділянки, і щонайменше цифровому зображенні і реєстрації нижньої та/або одну ділянку температурного контрасту визначаверхньої границі для розробки пласта копалини, ють на ординаті вихідного положення, спостереякщо величина середньої інтенсивності змінюєтьження здійснюють тепловою інфрачервоною кася на більшу величину середньої інтенсивності мерою, а положення первинної координати пікселів, ніж та, при якій тільки копалину підрубузадають по спеціальних розташуваннях пікселів в ють з пласта. цифровому зображенні на досліджуваній ділянці, і 23. Вимірювальний пристрій за п. 22, який відрізщонайменше одну ділянку температурного контняється тим, що блок обробки сигналу виконано з расту визначають реєстрацією максимуму серед можливістю надання інформації про положення на значень інтенсивностей сірих пікселів серед мноординаті вихідного положення, яка проходить вержини пікселів на ординаті вихідного положення в тикально вгору та вниз по висоті досліджуваної цифровому зображенні, яка проходить вгору та ділянки інфрачервоного випромінювання, і ділянку вниз по висоті досліджуваної ділянки. температурного контрасту визначено блоком об29. Спосіб за п. 26, який відрізняється тим, що робки сигналу на ординаті вихідного положення, досліджувану ділянку інфрачервоного випромінюяка визначається по спеціальних розміщеннях вання визначають ординатою вихідного положенпікселів в цифровому зображенні, одержаному від ня, яка проходить вертикально вгору та вниз по теплової інфрачервоної камери, причому принайвисоті досліджуваної ділянки, і щонайменше одну мні одна ділянка температурного контрасту визнаділянку температурного контрасту визначають із чається реєстрацією максимуму серед значень спостереження інфрачервоного випромінювання інтенсивності сірих пікселів серед багатьох піксена ординаті вихідного положення, лів на ординаті вихідного положення в цифровому 7 89535 8 спостереження здійснюють тепловою інфрачервобезпосередньо біля врубового пристрою гірничого ною камерою, а первинну координату визначають комбайна, що виконаний з можливістю вирубання по спеціальних розміщеннях пікселів в цифровому копалини, блок обробки сигналу для обробки призображенні, одержаному з неї, щонайменше одну йнятих сигналів інфрачервоного зображення для ділянку температурного контрасту визначають визначення щонайменше однієї ділянки темперареєстрацією максимуму серед значень інтенсивтурного контрасту, блок обробки зображення для ності сірих пікселів серед багатьох пікселів на орідентифікації по температурі структури видобутої динаті вихідного положення в цифровому зобракопалини шляхом реєстрації розміру щонайменше женні, яка проходить вгору і вниз по висоті однієї ділянки температурного контрасту, або редосліджуваної ділянки. єстрації значення температури щонайменше одні30. Пристрій для ідентифікації по температурі єї ділянки температурного контрасту, яка вище за структури копалини при видобутку її з шахти, що порогове значення температури, і блок формуванмістить блок прийому зображень для приймання ня вихідного сигналу для створення вихідного сигсигналів інфрачервоного зображення положення налу, який визначає структуру з можливістю іденсвіжої оголеної поверхні після вирубання копалини тифікації по температурі в копалині. Цей винахід відноситься до способів розробки родовища та до пристрою, і відноситься, зокрема, проте не виключно, до способів розробки родовища та до пристрою, придатного для розробки довгими забоями. Винахід має застосування в інших областях розробки родовищ і не повинен обмежуватися виключно розробкою довгими забоями. До цих пір, було відомо надання способів розробки родовища та пристрою для контролю добування копалини з пласту в шахті. Один відомий спосіб розробки довгими забоями включає спостереження інфрачервоного випромінювання поверхні свіжої підрубаної копалини у місці безпосередньо біля врубувального пристрою на ділянці, де вертикальна стінка врубу пласту перетинається з будь-якою верхньою або нижньою стінкою врубу пласту. Такий спосіб визначає або верхню або нижню границю пласту копалини в шахті, реєструючи наявність підвищення температури інфрачервоного випромінювання в місці перетину вертикальної стінки врубу і або горизонтальної нижньої частини врубу або горизонтальної покрівлі врубу. Зростання температури інфрачервоного випромінювання відбувається, коли врубувальний пристрій врубується в шари породи в покрівлі або підошві безпосередньо над або під пластом копалини. Це відбувається через те, що шари породи зазвичай є твердіші, а ніж копалина в пласті і, тому, шари породи сильніше нагріваються під час процесу виймання копалини, а ніж сама копалина під час підрубки. Таким чином, реєструючи підвищення температури інфрачервоного випромінювання на цій ділянці, можна визначити верхню і/або нижню границю пласту породи в шахті. Можуть генеруватися сигнали, які визначають верхню або нижню границю пласту так, що гірничий комбайн може контролюватися для припинення врубування врубувального пристрою у шари породи, які лежать зверху або знизу. Такі способи та пристрій є корисними, однак, вони мають дефекти і можна час від часу розробляти шари, які лежать зверху або знизу, і виймати копалину. Це накладає надмірні навантаження на шахтне обладнання, розбавляє вміст копалини і посилює інші проблеми виробництва, які включають збільшення пилу в шахті, який, у свою чергу, впливає на безпеку персоналу в ній. Існує потреба в кращому способі та пристрої. Згідно з одним аспектом винаходу, надається спосіб контролю горизонту при розробці родовища, де копалина, яка видобувається, виймається з видобувної поверхні пласту породи, причому у цьому способі: виймають копалину з пласту врубувальним пристроєм, що оголює свіжу поверхню після виймання неї, візуально спостерігають інфрачервоне випромінювання свіжої поверхні після виймання копалини у місці безпосередньо біля врубувального пристрою, визначають будь-які ділянки температурного контрасту із спостереження інфрачервоного випромінювання між верхньою границею спостереження та нижньою границею спостереження, визначають принаймні одну координату по висоті принаймні однієї ділянки температурного контрасту, і генерують вихідний сигнал, який вказує визначену координату по висоті так, що він може використовуватися як первинна координата для контролю горизонту. Згідно з іншим аспектом винаходу, надається вимірювальний пристрій для роботи з пристроєм для контролю горизонту гірничого комбайну, при цьому згаданий вимірювальний пристрій має блок для одержання зображень для приймання сигналів інфрачервоного зображення оглянутого положення свіжої поверхні врубу після виймання копалини безпосередньо біля врубувального пристрою гірничого комбайну, блок для обробки сигналів обробляє одержані сигнали інфрачервоного зображення для визначення принаймні однієї ділянки температурного контрасту між верхньою частиною зображення та нижньою частиною зображення, блок для визначення положення по висоті для приймання даних про будь-яку визначену ділянку температурного контрасту, оброблених блоком для обробки сигналів, і для обрахунку положення по висоті принаймні однієї визначеної ділянки температурного контрасту, і блок для формування вихідних сигналів для надання вихідного сигналу, що вказує обраховане положення по висоті для згаданого пристрою для контролю горизонту гірничого комбайну. 9 89535 10 Згідно з іншим аспектом винаходу, надається Фіг.3 зображає схематичний вид, який показує спосіб ідентифікації ідентифіковуваної по темпезону обзору інфрачервоної камери, що оглядає на ратурі структури у копалині, видобутої з видобувмісці свіжу поверхню після виймання копалини на ної поверхні в шахті, де врубувальний пристрій ділянці врубувального пристрою та між нижньою виймає копалину і оголяє поверхню після вийманграницею пласту та верхньою границею пласту; ня свіжої копалини, Фіг.4 зображає діаграму, яка показує зону обпри цьому згаданий спосіб включає візуальне зору інфрачервоної камери, як це зображено на спостереження безпосередньо біля врубувального Фіг.3, проте, яка показує первинну координату для пристрою інфрачервоного випромінювання повервизначення ділянок температурного контрасту; хні після виймання свіжої видобутої копалини, Фіг.5 зображає графік, який показує рівні інтевизначають принаймні одну ділянку темперансивності сірих пікселів зображення, виміряні турного контрасту із спостереження інфрачервоновздовж лінії, зображеної на Фіг.4; го випромінювання і визначають ідентифіковувану Фіг.6 зображає графік, який показує висоту діпо температурі структуру у видобутій копалині або лянки температурного контрасту в залежності від по: положення гірничого комбайну; 1. величині принаймні однієї ділянки темпераФіг.7 показує схему функціонального блоку, турного контрасту або по, яка відображає пристрій для обробки сигналів зо2. ділянці температурного контрасту, темперабраження ділянки температурного контрасту інтура якої вища температурного порогу. фрачервоного випромінювання, одержаних від Згідно з іншим аспектом винаходу, надається інфрачервоної камери, яка візуально оглядає інпристрій для ідентифікації ідентифіковуваної по фрачервоне випромінювання свіжої поверхні після температурі структури у видобутій копалині при виймання копалини; видобутку її з шахти, Фіг.8 зображає алгоритм обробки, використопри цьому згаданий пристрій має блок для вуваний з пристроєм, схематично зображеним на одержання зображень для приймання сигналів Фіг.7; інфрачервоного зображення, які вказують оглянуФіг.9 зображає вид, подібний до виду на Фіг.3, те положення свіжої оголеної поверхні після вийпроте який показує друге спостереження інфрачемання копалини безпосередньо біля врубувальнорвоного випромінювання свіжої поверхні після виго пристрою гірничого комбайну, що виймає ймання копалини для визначення верхньої або копалину з шахти, нижньої границі пласту; блок для обробки сигналів для обробки прийнФіг.10 зображає блок-схему, подібну до блокятих сигналів інфрачервоного зображення для схеми, зображеної на Фіг.7, проте, яка показує визначення принаймні однієї ділянки температурдодавання блоків для обробки інформації про верного контрасту, хню і/або нижню границю пласту копалини; блок для обробки зображень для ідентифікації Фіг.11 зображає алгоритм для використання з ідентифіковуваної по температурі структури видопристроєм, зображеним на Фіг.10 до міри, необбутої копалини або: хідної для визначення верхньої і/або нижньої гра1. визначенням розміру принаймні однієї діляниці пласту, нки температурного контрасту, або Фіг.12 зображає алгоритм, який показує вихідні 2. визначенням розміру принаймні однієї ділясигнали для застосування при контролі горизонту нки температурного контрасту, температура якої гірничого комбайну, і вища за температурний поріг, і, Фіг.13 зображає функціональну схему, яка поблок для вихідних даних для надання вихідних казує автоматизований контроль горизонту в гірсигналів, які вказують ідентифіковувану по темпеничому комбайні. ратурі структуру в шахтній копалині. В наступному описі обговорюється розробка з Для більш чіткого визначення винаходу, на довгими забоями. Як зазначено перед цим, винаданий момент будуть описуватися приклади варіхідницькі ідеї не повинні обмежуватися розробкою антів його виконання з посиланням на супровідні з довгими забоями. Винахідницькі ідеї можуть креслення на основі розробки з довгими забоями. практикуватися в інших шахтних застосуванЯк зазначено перед цим, винахід не повинен обнях/підходах, а винахід повинен розглядатися як межуватися розробками з довгими забоями і потой, що також поширюється на інші шахтні застодальший опис слід розглядати як приклад. Для сування/підходи. інших способів розробки родовища, подібним чиФіг.1 зображає схематичний вид перспективи, ном можуть використовуватися викладені тут який показує пласт 1 копалини 3 в шахті. Типово, принципи. копалина 3 є вугіллям, проте вона може бути інНа кресленнях: шим матеріалом. Вугілля зазвичай відкладається в Фіг.1 зображає схематичний вид перспективи шарах пласту 1. Пласт 1 обмежений верхніми шапроцесу розробки з глибокими забоями глибоко в рами 5 та нижніми шарами 7. Вугілля може відклаземлі; датися в шарах різних геологічних матеріалів, таФіг.2 зображає схематичну діаграму, подібну ких як саме вугілля, глина або зола або інший до зображеної на Фіг.1, яка показує пласт видобуматеріал змінної товщини та твердості. Ця шарутої копалини, який показує ділянку температурного ватість може з'являтися у вигляді тонких горизонконтрасту інфрачервоного випромінювання у фотальних лінійних смуг в пласті 1 вугілля. Ці лінійні рмі смуги на свіжій поверхні після виймання копасмуги сильно зв'язані з профілем пласту 1. Через лини; те, що ці лінійні смуги сильно зв'язані з профілем пласту 3, ми зрозуміли, що реєструючи одну або 11 89535 12 більшу кількість цих лінійних смуг, ми можемо нагу або характеристику 33, що проходить крізь дати засіб для одержання первинної координати увесь пласт 1. На практиці, може бути одна або для контролю горизонту гірничого комбайну. Типобільша кількість смуг або характеристик 3, які усі во, смуги не завжди чітко видимі неозброєним приблизно проходять в площинах, паралельних оком і, потрібен деякий автоматизований процес одна одній. Смуги або характеристики 33 є голодля виявлення однієї або більшої кількості смуг, і вним чином плоскими, проте існують деякі нахили і для формування вихідних сигналів, що можуть інші контури, присутні внаслідок природи шарувавикористовуватися традиційною схемою контролю тості пласту 1. Типово, смуга або характеристика горизонту гірничого комбайну для контролю поло33 складається з покладів матеріалу, що має твеження горизонту гірничого комбайну та, таким чирдість, більшу за твердість копалини 3 як такої. В ном, встановленого врубувального пристрою. деяких випадках, смуга або характеристика 33 Фіг.1 зображає частково вириту шахту, де гірможе візуально розрізнятися неозброєним оком, ничий комбайн 9 має обертальний врубувальний проте вона може також бути невидимою для непристрій 11. Врубувальний пристрій 11 встановлеозброєного ока. ний на важелі 13, що може гойдатися вгору і вниз Ми виявили, що, якщо спостерігається інфравідносно гірничого комбайну 9. Гірничий комбайн 9 червоне випромінювання, випущене з свіжої повевстановлений на рейкових засобах 15, що простярхні 25 після виймання копалини біля врубувальгаються по ширині пласту 1 (або принаймні по шиного пристрою 11, то смуга або характеристика 33 рині передбаченої розроблюваної ділянки пласту показує рівень інфрачервоного випромінювання, 1). Гірничий комбайн 9 рухається по рейкових завищій за рівень інфрачервоного випромінювання собах 15, а важіль 13 піднімається або опускаєтьоточуючої копалини 3. Це ймовірно відбувається ся так, що обертальний врубувальний пристрій 11 через те, що врубувальний пристрій 11 нагріває виймає копалину 3 з пласту 1. В деяких випадках, матеріал смуги або характеристики 33 сильніше за гірничий комбайн 9 може мати другий важіль 13 та матеріал копалини 3 під час процесу вийманврубувальний пристрій 11, розташований на іншоня/розробки. Відповідно, спостерігаючи інфрачерму кінці гірничого комбайну 9. У цьому випадку, воне випромінювання свіжої поверхні 25 після виодин з ножових валів 11 виймає копалину 3 з плаймання копалини в місці безпосередньо біля сту 1 вгору в напрямку покрівлі 17 шахти, а інший врубувального пристрою 11, можна визначати врубувальний пристрій 11 виймає вниз до підошви будь-які ділянки температурного контрасту із спо19 шахти. Типово, покрівля 17 знаходиться в стику стереження інфрачервоного випромінювання між між пластом 1 та верхніми шарами 5. Подібним верхньою границею спостереження та нижньою чином, підошва 19 знаходиться в стику між пласграницею спостереження. У цей спосіб, якщо вертом 1 та нижніми шарами 7. Нависаюча покрівля хня границя ідеально знаходиться саме під стиком 17 утримується великою кількістю кострових кріпміж пластом 1 та верхніми шарами 5 і/або нижніми лень 21. Зображені тільки два кострові кріплення шарами 7, то будь-які визначені ділянки темпера21, проте на практиці присутні багато кострових турного контрасту будуть вказувати наявність смукріплень 21, розташованих одне біля одного по ги або характеристики 33. Положення смуги або довжині рейкових засобів 15. Кострові кріплення характеристики 33 може потім використовуватися 21 з'єднуються своїми нижніми опорними ділянкадля контролю горизонту в гірничому комбайні 9. ми з рейковими засобами 15 і ними можна маніпуОскільки смуга або характеристика 33 головним лювати для проштовхування рейкових засобів 15 чином паралельна верхній або нижній границі вперед в напрямку до пласту після проходження пласту 1, що стосується покрівлі 17 або підошви гірничого комбайну 9. Костровими кріпленнями 21 19, то надання первинної координати на основі можна додатково маніпулювати для подальшого принаймні однієї ділянки температурного контрасштовхання їх в напрямку до рейкових засобів 15, ту дозволяє використовувати ідеальний механізм які рухають верхні кріпильні плечі 23 впритул до для установки на задану позицію горизонту для свіжої поверхні 25 після виймання копалини з плаконтролю гірничого комбайну 9. сту 1. Спосіб для переміщення гірничого комбайну В прикладі переважного варіанту виконання, 9 і гойдання ножових валів 11 та переміщення костеплова інфрачервона відеокамера, яка працює з трових кріплень 21 розглядаються як відомі самі довгими хвилями системи PAL (8-14 мікрон) зі по собі в області розробки з довгими забоями і тут швидкістю 25 кадрів/с, використовується для надалі детально описуватися не будуть. дання цифрового зображення свіжої поверхні 25 Фіг.2 зображає вид перспективи пласту 1 копісля виймання копалини. Також може бути можпалини 3 в розробленому стані, як це зображено ливим використовувати відеокамеру дисплею, яка на Фіг.1 без верхніх шарів 5, нижніх шарів 7, гірникерується обчислювальною машиною, яка чутлива чого комбайну 9 та кострових кріплень 21. Тут, до коротких хвиль (1-3 мікрон) теплового інфрачечітко показано, що врубувальний пристрій 11 гіррвоного випромінювання для візуального спостеничого комбайну вирубав свіжу поверхню 25 копареження свіжої поверхні 25 після виймання копалини, яка має вертикальну стінку 27, що проходить лини. Пристрій для отримання зображення може від однієї сторони до іншої вздовж пласту 1. Вона належним чином вибиратися для узгодження з також має вертикальну торцеву стінку 29, що законкретною копалиною, яка видобувається, та гірглиблена в пласт, на глибину, яка дорівнює глибиничим обладнанням. Коли використовується відні занурення врубувального пристрою 11. Фіг.2 еокамера, то аналіз одержуваного цифрового зотакож показує попередньо поверхню 31 врубу кображення може проводитися в кожному кадрі або палини, що проходить паралельно свіжій поверхні у вибраних кадрах, інакше кажучи в кожному 25-му 25 врубу копалини. Фіг.2 також показує єдину смукадрі. Альтернативно, може використовуватися 13 89535 14 теплова інфрачервона фотозйомна камера та зовисоті "b" в напрямку "Y" (вертикаль). Таким чибраження, згенеровані в наперед визначені часові ном, визначаючи координату, яка відноситься до інтервали, які залежать від швидкості руху гірничоперетину рівня початкового положення 37 із смуго комбайну 9 по поверхні пласту 1 під час розробгою або характеристикою 33, можна визначити ки родовища. В представленому прикладі, відоположення смуги або характеристики 33 і викорисбражальний пристрій є цифровою тепловою товувати положення координати для контролю інфрачервоною камерою, що оглядає свіжу повергоризонту гірничого комбайну 9. хню 25 після виймання копалини, яка проходить по Слід відмітити, що, коли гірничий комбайн 9 ширині розробки пласту 1, і аналізується кожний рухається по пласту 1, то зона спостереження 34 кадр, оскільки це підвищує чутливість системи до також буде рухатися і буде відслідковуватися помалих показників теплового інфрачервоного виложення однієї або більшої кількості смуг або хапромінювання порівняно з аналізом кожного так рактеристик 33. Таким чином, коли пласт 1 рухазваного 25-го кадру. В альтернативному варіанті ється вгору або вниз, то смуга або характеристика виконання, свіжа поверхня після виймання копа33 повинна рухатися в унісон, і може здійснюватилини може бути вертикальною торцевою стінкою ся безперервний контроль гірничого комбайну 9 29, яка представляє глибину врубу врубувального шляхом визначення висоти місця перетину рівня пристрою 11. Ця альтернатива повинна розглядавихідного положення 37 зі смугою або характеристися в рамках винаходу. Бажано, щоб камера тиками 33. Таким чином, якщо положення по висооглядала досліджувану ділянку на свіжій поверхні ті смуги або характеристики 33 змінюється, то бу25 після виймання копалини в безпосередній блиде мати місце відповідна зміна в положенні зькості біля врубувального пристрою 11. У цей координати перетину, яке може використовуватиспосіб, залишкове інфрачервоне випромінювання ся для надання сигналу для контролю гірничого буде досягати майже максимального рівня, де комбайну 9. температура не буде спадати протягом певного Посилаючись тепер на Фіг.5, бачимо графік ріперіоду часу після проходження врубувального внів інтенсивності інфрачервоних пікселів, визнапристрою 11. чених з камери відносно фону на досліджуваній Чутливість до інфрачервоного випромінюванділянці 35 в зоні спостереження 34. В прикладі, ня теплової інфрачервоної камери має особливу ордината вихідного положення 37 визначається перевагу по відношенню до стандартних камер, які спеціальними розташуваннями пікселів в цифросприймають видиме світло, в операціях по розровому зображенні, одержаного з цифрової відеокабці родовища. Зокрема, теплові інфрачервоні камери. Фіг.5 зображає рівні інтенсивності пікселів мери, які сприймають довгі хвилі, сильно чутливі сірого кольору вздовж ординати вихідного полодо оклюзій, спричинених пилом. Теплові інфрачеження 37, яка проходить вгору та вниз по висоті рвоні камери можуть також працювати у повній спостереження. На Фіг.4 графік показує максимум темряві, що додатково робить їх придатними до серед значень інтенсивності сірих пікселів на відпрактичного застосування. Зона спостереження стані "b" по висоті. На Фіг.5 відстань "b" по висоті 34, яка охоплює досліджувану ділянку 35 камери, зображена вздовж горизонтальної осі. Тут, локаліймовірно повинна показувати важливі досліджувазований максимум 39 з'являється серед значень ні ознаки, що появляються в тепловій області, яка інтенсивності сірих пікселів на висоті "b". Величина іншим чином може не з'являтися у видимій обласлокалізованого максимуму 39 зображена ординаті. Типовим положенням для встановлення камери тою "d". Фіг.5 також показує, що може встановлює положення на корпусі гірничого комбайну 9 і вона ватися порогова величина, яка має ординату орієнтована так, що камера має оглядуваний об'"dmin". Таким чином, якщо локалізований максимум єкт на досліджуваній ділянці врубувального при39 перевищує порогову величину dmin, то це потім строю 11 і будь-якому оточуючому пласті 1 або представляє ділянку температурного контрасту шарах 5, 7, і так, що вона захищена від суворих відносно оточуючого фону. Це, у свою чергу, робочих умов видобування. представляє висоту розміщення смуги або харакФіг.3 зображає зону спостереження 34, яка теристики 33. Типово, dmin встановлюється вищою охоплює досліджувані ділянку 35 цифрової відеопорогового рівня фону інфрачервоного випромікамери. У цьому випадку, досліджувана ділянка 35 нювання, випущеного свіжою поверхнею 25 після має дещо трапецевидну форму. Це залежить від виймання копалини, для відомого складу копалини кута нахилу камери відносно свіжої поверхні 25 3, такого як вугілля. Порогова величина, предстапісля виймання копалини. Досліджувана ділянка влена величиною dmin, необхідна для визначення, 35 вибирається в зоні спостереження 34 шляхом наприклад, того, де знаходиться смуга або хараквибору конкретних пікселів для визначення її плотеристика 33, або чи вона відсутня або слабко щі. Фіг.3 показує єдину смугу або характеристику відрізняється від фону. Якщо найбільше значення 33, проте можуть бути присутніми інші смуги або "d" даних інтенсивності сірих пікселів вертикальної характеристики 33. лінії дорівнює або більше за задану мінімальну Фіг.4 показує установку початкового положенпорогову величину dm jn виявлення смуги, то індекс ня 37 обзору на відстані "а" від нульового поло"b" (по горизонтальній осі), пов'язаний з максимаження на горизонтальній осі "X". Рівень початковольною величиною "d", береться як реальне полого положення 37 рухається по вертикальній осі "Y" ження ділянки температурного контрасту (і смуги вгору та вниз по висоті зони спостереження 35 або характеристики) на зображенні. Якщо величиінфрачервоного випромінювання. Фіг.4 показує, на "d" менша за поргогову величину dmin, то висота що рівень початкового положення 37 має точку не обраховується. перетину із смугою або характеристикою 33 на 15 89535 16 Будь-яке відслідковування смуги або характеЕтап фільтрування Калмана, хоча й не є суттєвим, ристики 33 потребує взяття до уваги похибок і шупідтверджує особливу корисність у випадках, де му спостереження, пов'язаного з виявленням і/або інтенсивність смуги або характеристики 33 є відспособами локалізації. Це особливо важливо у носно слабкою (тобто, низьке відношення сигвипадках, де смуга або характеристика 33 з'являнал/шум), оскільки він представляє стійкий та деється на інфрачервоному зображенні відносно термінований спосіб, який має справу з шумом та слабкою. В деяких випадках, значення інтенсивнопохибкою вимірювання. сті можуть бути такими великими відносно фону, Слід зазначити, що може існувати багато макщо спеціальна обробка може бути непотрібною. У симумів інтенсивності сірих пікселів вздовж вихідвипадку, де може бути відносно слабкий максимум ного рівня, кожен з яких представляє іншу смугу локалізованого інфрачервоного випромінювання, або характеристику 33. Окрім того, ці максимуми то може застосовуватися робастний фільтр, який можуть мати різні значення інтенсивності пікселів відслідковує ознаку. Фільтр "Калмана" представмаксимумів. Все це може оброблятися для визналяє особливо корисний робастний фільтр і добре чення того, чи перевищують вони порогову веливідомий для обробки сигналів. чину, і усе це або вибрані серед них значення виФільтр Калмана рекурсивно генерує оцінки пакористовуються для контролю горизонту. раметру, використовуючи вектор стану, модель Фіг.6 показує графік смуги або характеристики системи та модель спостережень. Для цього од33 в залежності від положення гірничого комбайну новимірного варіанту відслідковування положення 9. Реальна реєстрація координати по висоті смуги в залежності від швидкості, вектор стану задається або характеристики 33 по своїй суті є визначенням вектором (2x1) розміру ділянки. Під час роботи гірничого комбайну вигідно посилатися на координату по висоті [h( t )] x( t ) = смуги або характеристики 33 як функцію від поло[ v( t )] ження замість часу. Це легко здійснюється реєстякий містить істинну висоту h(t) і швидкість v(t) рацією значень висоти положення смуги або харасмуги або характеристики 33 в момент часу t. Моктеристики 33 відносно положення гірничого дель системи задається рівнянням комбайну 9. Фіг.6 ілюструє типові вихідні дані з x(t+1)=Fx(t)+w(t), де алгоритму відслідковування (на нього будуть по[1 DT] силатися пізніше), який показує висоту положення F= смуги або характеристики 33 як функцію горизон[0 T ] тального положення поверхні гірничого комбайну 9 є матрицею (2x2) моделі, яка описує еволюцію по ширині пласту 1. системи, ΔΤ представляє проміжок часу між сусідФіг.7 зображає блок-схему, яка показує блоки німи кадрами зображення, і де w(t) є матрицею пристрою, використовуваного для надання вихід(2x1), яка представляє збурення системи для наного сигналу для контролю горизонту гірничого дання можливості відслідковування ознаки смуги комбайну. Тут, пристрій використовує вищеописані маркера. Припускається, що елементи матриці w(t) принципи. Теплова інфрачервона цифрова відеорозподілені як Гаусівський шум з нульовим середкамера 41 оглядає свіжу поверхню 25 після вийнім та коваріаційною матрицею Q розміру (2x2). мання копалини і має зону спостереження 34, яка Рівняння спостереження має вигляд b(t)=Ηx(t)+u(t), охоплює досліджувану ділянку 35. Цифрові вихідні де b(t) представляє оцінку висоти, згенеровану сигнали 43 надсилаються до блоку 45 для одерсмугою або детектором характеристики 33 і прожання зображень для прийому сигналів інфрачерцесом локалізації в момент часу t, Η=[1 0] є вектовоного зображення свіжої поверхні 25 після вийром розміру (1x2), x(t) є вищезгаданим вектором мання копалини безпосередньо біля стану, a u(t) представляє похибку, пов'язану з алврубувального пристрою 11 гірничого комбайну. горитмом знаходження смуги маркера. Значення Сигнали 47 є вихідними сигналами з блоку 45 для u(t) вважається розподіленим як Гаусівський шум з одержання зображень і надсилаються до блоку 49 нульовим середнім та коваріацією R. для обробки сигналів, де сигнали інфрачервоного Під час ініціювання процесу відслідковування, зображення на досліджуваній ділянці 35 реєструвідповідним елементам вектора стану присвоюються для принаймні однієї ділянки температурноються значення висоти положення поточної смуги го контрасту між верхньою частиною зображення або характеристики 33 або нульової швидкості, та нижньою частиною зображення, і між верхньою при цьому діагональним елементам коваріаційної границею пласту та нижньою границею пласту. матриці Q моделі системи присвоєно значення Якщо реєструється принаймні одна ділянка тем0,01, яке представляє гарну модель для типово пературного контрасту, то сигнали 51 надсилаютьповільно задіюваної динаміки смуги або характеся до блоку 53 для визначення положення по виристики 33, а коваріація R, пов'язана з рівнянням соті, де координата положення по висоті обзору, є відносно великою величиною, що дорівобраховується для принаймні однієї вибраної дінює 10,0, що відповідає поточній практиці, для лянки температурного контрасту. Сигнали 55, які забезпечення збіжності. Фільтр Калмана реалізувідображають координату положення по висоті, ється з використанням стандартних етапів прогнопотім надсилаються до блока 57 для вихідних сигзу та корекції, деталі яких широко доступні в пубналів для надання вихідного сигналу 59, який вкалічній літературі. зує обраховане положення по висоті принаймні Оцінки, одержані фільтром Калмана, забезпеоднієї ділянки температурного контрасту так, що чують краще представлення динаміки виявленої вихідний сигнал 59 може використовуватися в смуги або характеристики 33 і показують високу схемі 61 контролю горизонту гірничого комбайну. стійкість до шуму для невідфільтрованих оцінок. 17 89535 18 Різні блоки, позначені на Фіг.7, можуть бути окреdmin (Фіг.5). На етапі 7, застосовується робастний мими блоками або можуть бути блоками в комп'ювідслідковуючий фільтр, такий як попередньо опитерному пристрої. Типово, блоки конфігуруються в саний фільтр Калмана. На етапі 8, визначається комп'ютерному пристрої, який використовує провисота локалізованого максимуму 39 (висота "b" грамне забезпечення, передбачене для конфігуна Фіг.4). Може бути бажаним виразити це значенрування комп'ютера для здійснення бажаних фуння висоти в іншій координатній системі, такій як кцій. Хоча координата положення по висоті була координатна система гірничого комбайну. Це може описана як одномірна координата, вона може бути досягатися прямим застосуванням способів калібдвовимірною або тривимірною шляхом відповіднорування камери, у яких положення камери на гірго введення інформаційних сигналів абсолютної ничому комбайні 9 є відомими. величини вектора положення гірничого комбайну 9 Тут слід зазначити, що опис на даний момент в шахті. Такі сигнали можуть одержуватися з інервідноситься до виявлення єдиної смуги сигналу ційних навігаційних блоків, зв'язаних з гірничим або характеристики 33 в зоні спостереження 34 комбайном 9. досліджуваної ділянки 35. Множина смуг або хараФіг.8 показує алгоритм виконуваних процесів. ктеристик 33 може виявлятися, а алгоритм належТут, етап 1 визначає положення гірничого комбайним чином сформульований для надання можлину. Придатний пристрій для визначення положенвості відповідного відслідковування двох або ня зазвичай встановлюється на найбільшому оббільшої кількості зареєстрованих смуг або харакладнанні для видобутку вугілля, такому як теристик 33. Таким чином, одна або більша кільвиймальні комбайні для довгих забоїв або виймакість зареєстрованих смуг або характеристик 33 льні комбайни неперервної дії. Таким чином, на може використовуватися для контролю горизонту етапі 1 можуть генеруватися сигнали, які предстагірничого комбайну. Це особливо корисно там, де вляють положення гірничого комбайну 9. Незалеодна або більша кількість смуг або характеристик жні відомі засоби позиціонування гірничого ком33 може зникати на досліджуваній ділянці 35, тоді байну можуть використовуватися для як інші смуги або характеристики можуть залишаформування, в разі потреби, сигналів, які вказують тися незачепленими. положення гірничого комбайну. На етапі 2, теплові На етапі 9, координати по висоті, визначені на інфрачервоні зображення приймаються з викорисетапі 8, перетворюються як функція положення танням прямого цифрового інтерфейсу або застокомбайну, як це тут представлено на Фіг.6. Таким суванням стандартного аналога способам цифрочином, вихідний сигнал 63 може надсилатися до вого перетворення у випадку, коли зображення є гірничого комбайну 9 для контролю горизонту. аналоговим. Типове теплове зображення показане Посилаючись тепер на Фіг.9, бачимо вид, потут на Фіг.4. Слід зазначити, що від точки одердібний до зображеного на Фіг.3, проте, який також жання даних вихідна інформація з теплової інфразображає другу досліджувану ділянку інфрачервочервоної відеокамери є аналогічною до інформації ного зображення 67. Тут, друга досліджувана дістандартної камери для кадрових зображень, тоблянка 67 розташована з охопленням місця перето, до послідовності кадрових зображень в цифротину свіжої вертикальної поверхні 25 врубу із вій або аналоговій формі. Алгоритм, зображений покрівлею 17 або підошвою 19. Площа та полона Фіг.8, послідовно обробляє кожен кадр зображення другої досліджуваної ділянки ідентифікуєтьження, номінально не беручи до уваги швидкість ся розташуванням пікселів в зображенні зони споодержання. Цей вибір кадру є довільним і не є стереження 34. Таким чином, друга досліджувана обмежувальним. ділянка 67 надсилає додаткові сигнали інфрачерНа етапі 3, визначається зміна положення воного зображення для реєстрації будь-якої ділянкомбайну. Саме через це, незважаючи на те, що ки температурного контрасту в місці перетину вергірничий комбайн 9 просунувся по поверхні пласту тикальної поверхні 25 врубу (дивіться Фіг.2) або 3, повинна бути потреба в повторній обробці існугоризонтальної поверхні покрівлі 17 або підошви ючого зображення, одержаного камерою 41. Таким 19 врубу пласта. Тут, будь-яка зареєстрована дічином, сигнали з процесу позиціонування комбайлянка температурного контрасту інфрачервоного ну порівнюються для реєстрації переміщення комвипромінювання визначає місце перетину пласту 1 байну 9 і, таким чином того факту, що сигнали зоз верхніми шарами 5 і/або нижніми шарами 7. Табраження можуть оброблятися на етапі 4. На етапі ким чином, сигнали, які вказують положення по 4, в разі присутності смуги або характеристики 33, висоті, можуть генеруватися цими додатковими вона вказує місцеву ознаку відносно місцевого сигналами інфрачервоного зображення від свіжої фону. Таким чином, множина даних формується поверхні після виймання копалини, які використовідслідковуванням величини пікселя зображення вуються з сигналами попередньо описаної смуги на ординаті вихідного положення 37. Це призвоабо характеристик 33 для контролю горизонту. дить до генерування множини даних, подібної до Таким чином, у цьому випадку, додаткові сигнали зображеної на Фіг.5. На етапі 5, локалізований інфрачервоного зображення можуть оброблятися максимум 39 визначається рівнями інтенсивності для надання положень по висоті місця перетину значень сірих пікселів по вертикальній лінії вихідвертикальної поверхні 25 врубу з покрівлею 17 або ного положення і вниз по висоті обзору зони спопідошвою 19 для обмеження ділянки руху вгору стереження 34 на ординаті вихідного положення і/або вниз важеля 13 для, у свою чергу, контролю 37. Найяскравіша точка серед величин інтенсивверхньої границі розробки пласту та нижньої граності пікселів представляє локалізований максиниці розробки пласту. У цьому випадку, генеруєтьмум 39. Етап 6 визначає, чи перевищує максимум ся другий вихідний сигнал, який вказує визначене 39 встановлений поріг, представлений величиною 19 89535 20 координатне положення по висоті ділянки темпекрізь сегменти твердішого матеріалу (наприклад, ратурного контрасту в місці перетину. камінь) і забезпечує робастне вимірювання будьФіг.10 зображає блок-схему обладнання, яке яких величин інтенсивності теплового випромінюмає попередньо описаний пристрій, який визначає вання. Максимальна середня величина зберігасмугу або характеристику 33, і пристрій для реєстється для поточного положення комбайну 9. рації місця перетину вертикальної поверхні врубу На етапі 5, процес використовується для виз покрівлею 17 або підошвою 19. У цьому приклазначення того факту, чи змінилося горизонтальне ді, використовується одна інфрачервона відеокаположення комбайну. Це ідентично до етапу 4 на мера 41 для досліджуваної ділянки 35, а додаткоФіг.8. На етапі 6, величина середньої інтенсивносва інфрачервона відеокамера 69 використовується ті, обрахована на ньому, порівнюється з наперед для другої досліджуваної ділянки 67. В поперевизначеною пороговою величиною виявлення стидньому обговоренні, єдина інфрачервона камера ку. Якщо середня величина вища за порогову ве41 використовувалась для охоплення обох досліличину виявлення стику вугілля, то стик вугільного джуваних ділянок 35, 67. У цьому прикладі, друга пласту вважається пройденим. І навпаки, якщо інфрачервона відеокамера 69 використовувалась середнє значення нижче порогової величини вугідля відображення того факту, що принципи не льного стику, то вважається, що гірничий комбайн повинні обмежуватися простим застосуванням врубується в пласт 1. На етапі 8, вихідний сигнал єдиної інфрачервоної камери. Лівосторонні блоки містить інформацію про положення стику пласту з з Фіг.10 дублюють блоки, зображені на Фіг.7, і далі покрівлею 17 або підошвою 19. Це забезпечує описуватися не будуть. Праворуч на Фіг.10 зобрамаксимальну висоту для видобутку копалини комжена друга теплова інфрачервона відеокамера 69, байном або малу висоту для розробки пласту. На яка має досліджувану ділянку 67. Цифрові вихідні етапі 9, генерується вихідний сигнал середньої сигнали 71 надсилаються до блоку 73 для одерточки, якщо не визначається перетин вугільного жання зображень. Сигнали 75 є вихідними сигнастику. Це забезпечує придатний індикаторний сиглами з блоку 73 для одержання зображень і наднал (наприклад, половину вийнятої висоти пласту) силаються до блоку 49 для обробки сигналів. Тут для надання вихідної інформації, придатної для сигнали надсилаються до блоку 53 для визначензастосування в системі контролю горизонту. Альня положення по висоті, де обраховуються коортернативно, придатний індикаторний сигнал може динатні положення по висоті ділянок температурвстановлюватися для запуску системи контролю ного контрасту, що визначають місце перетину гірничого комбайну в режимі без зворотного зв'язвертикальної поверхні 25 врубу пласту з покрівлею ку. 17 і/або підошвою 19. Тут, сигнали надсилаються Тут описана система, яка відслідковує, смугу до блоку для вихідних сигналів для визначення або характеристику 33, а детектор вугільного стику сигналів, які вказують координатне положення, які для виявлення стику вертикальної свіжої поверхні надсилаються до схеми 61 контролю гірничого 25 після виймання копалини з покрівлею 17 або комбайну для контролю гірничого комбайну. підошвою 19 забезпечує два компліментарні місФіг.11 зображає алгоритм обробки для виявцеві визначення поведінки пласту 1. Хоча вихідні лення перетину свіжої поверхні 25 після виймання сигнали систем можуть використовуватися незакопалини з покрівлею 17 або підошвою 19. Цей лежно, вони також можуть корисно поєднуватися алгоритм вимагає двох параметрів, які встановдля забезпечення робастної завбачуваноїлюються під час початкового калібрування. Перзворотної сенсорної здатності для застосування в ший параметр відповідає пороговій величині, вище контролі горизонту гірничого комбайну 9 в реальякої досягається стик вугільного пласту з покрівному часі. лею 17 або підошвою 19. Поріг виявлення встаноФіг.12 показує як вихідні сигнали системи вивлюється рівним 70% максимального значення явлення стику та відслідковування смуги або хараінтенсивності і представляє відповідний початкоктеристики 33 можуть поєднуватися для надання вий вибір. Другий параметр є висотою виймання робастної ординати вихідного положення для конпласту, яка може легко визначатися гірничим комтролю горизонту. Таким чином, якщо повинно відбайном 9, який сам використовує відомі способи. бутися так, що основний та переважний режим На етапі 1, положення комбайну визначається роботи, який використовує смугу або характерисзгідно з тими ж способами, описаними для етапу 1 тику 33, не доступний, то потім вихідний селектор на Фіг.8. На етапі 2, здійснюється одержання зоможе експлуатуватися для використання сигналів бражень і це знову ідентично з етапом 2, зображеграничного стику хімічно активного (і крупнішого) ним на Фіг.8, проте з іншої камери або досліджувугільного пласту для контролю горизонту. Якщо ваної ділянки в зображенні від єдиної камери. На формуються сигнали, які відслідковують смугу або етапі 3, визначається середня величина інтенсивхарактеристику 33, і не формуються сигнали переності усіх пікселів на зображенні зони спостеретину стику, то система може видавати, в залежноження. Якщо середнє значення інтенсивності змісті від спеціальної стратегії керування горизонтом нюється, як це відзначено процесом осереднення місця розробки родовища, вихідні сигнали останусіх рівнів величини інтенсивності пікселів на зоньої смуги або характеристики 33, сигнали, які браженні від другої камери 69, то може визначативказують висоту виймання половини пласту або ся місце перетину врубувального пристрою 11 з нульові сигнали. Тут, на етапі 1, робиться оцінка покрівлею 17 або підошвою 19. На етапі 4, зберігасмуги маркера для визначення присутності смуги ється максимальна середня величина інтенсивноабо характеристики 33. Якщо вона присутня, то на сті пікселів. Така величина може значно змінюваетапі 2 формується вихідний сигнал, який вказує тися, коли врубувальний пристрій 11 рухається висоту. Якщо не визначається смуга або характе 21 89535 22 ристика 33, то потім на етапі 3 робиться оцінка смуги. Таким чином, існує підвищений практицизм відносно того, чи виявлено стик вугільної підошви. і надійність гірничих комбайнів, які використовують Якщо він виявлений, то визначається вихідний наведені тут принципи. Наведені тут принципи сигнал для вказання висоти підошви. Якщо не виможуть використовуватися або в реальному часі явлено стик підошви, то на етапі 5 робиться оцінка або автономно. Розкриті тут способи представлящодо того, чи виявлено перетин покрівлі. Якщо це ють автоматичні, оперативні, саморегулюючі сповиявлено, то формується вихідний сигнал для вкасоби виявлення покрівлі або підошви та виявлення зання висоти покрівлі 17. Якщо стик не виявлено, смуги або характеристики 33 для контролю горито на етапі 7 формують вихідні сигнали, які вказузонту. Окрім того, вихідні сигнали, які вказують ють останню відому висоту положення смуги. координати положень смуги або характеристики Для здійснення контролю горизонту гірничого 33 або положення стику покрівлі 17 або підошви комбайну, такого як виймальний комбайн для роз19, можуть використовуватися в процесах спостеробки довгими забоями, вихідний сигнал системи, реження розробки родовища для значного покраяка відслідковує смугу або характеристику 33, щення операцій по його розробці. надсилається в існуючу контрольну систему важеТакож слід відзначити, що описана тут систеля 13 гірничого комбайну для розробки довгими ма для виявлення положення смуги або характезабоями. Важелі 13 є основним засобом регулюристики 33 може використовуватися для ідентифівання положення горизонту (горизонталі) виймакації ідентифіковуваної по температурі структури у льного комбайну 9 для розробки довгими забоями, видобутій копалині під час видобутку неї з шахти. коли він виймає копалину 3, таку як вугілля. ПоТаким чином, реєструючи сигнали інфрачервоного правки до горизонту розробки родовища зазвичай зображення оглянутого положення свіжої поверхні застосовуються на кожному зворотному і прямому після виймання копалини безпосередньо біля врулінійному циклі гірничого комбайну 9 вздовж рейбувального пристрою гірничого комбайна, можна кових засобів 15. Сигнали які вказують висоту поодержати сигнали, які можуть використовуватися ложення смуги або характеристики 33, можуть для ідентифікації ідентифіковуваної по температумиттєво контролюватися контрольною системою, рі структури у видобутій копалині. Ідентифіковувавикористовуючи виявлені висоти. Ось чому будьна по температурі структура може ідентифікуватияка зміна висоти очікується як цілком мінімальна. ся або реєстрацією розміру (тобто номер пікселя Якщо потрібно, то висоти в різних місцях вздовж високої інтенсивності) принаймні однієї ділянки поверхні шахти можуть зберігатися в запам'ятовутемпературного контрасту або реєстрацією розміючому пристрої і потім братися з пам'яті на настуру принаймні однієї ділянки температурного контпному зворотному або прямому лінійному циклі расту, температура якої вища за порогову величигірничого комбайну 9, де вони можуть братися з ну. Вихідний сигнал може надсилатися від пам'яті і порівнюватися з будь-якими заново вимівихідного блоку для вказання ідентифіковуваної по ряними значеннями висоти положення смуг або температурі структури у видобутій копалині. У характеристик 33. цьому прикладі, Фіг.7 показує необхідні блоки для Може братися до уваги динаміка контрольної обробки сигналів, де вихідний сигнал 59 забезпесистеми гірничого комбайну 9, яка реєструє спецічує вказання ідентифіковувану по температурі альні механічні обмеження врубувального прикопалину. Спеціальна діаграма схеми показана на строю 11 і будь-яку бажану швидкість зміни профіФіг.14. Тут, цифрова відеокамера 41 буде надавалю горизонту для забезпечення безпечного та ти вихідні сигнали 43 для блоку 45 для одержання практичного контролю. зображень. Блок 45 для одержання зображень Фіг.13 зображає блок-схему, яка показує голобуде обробляти сигнали 43 у той же спосіб, як це вну схему для автоматизації контролю горизонту в пояснено для Фіг.7. Вихідні сигнали 47 будуть надгірничому комбайні 9. Бажане вертикальне полосилатися до блоку 49 для обробки сигналів, який ження в пласті 1 є типово зафіксованим зміщенможе визначати перевищення величиною інтенсиням від положення по висоті смуги або характеривності температурних пікселів інфрачервоного стики 33. Тут на етапі 1, встановлюють контрольну випромінювання певної порогової величини, і надточку бажаного горизонту. На етапі 2, командний силати вихідний сигнал 51 до блоку 57 для вихідсигнал (похибка положення) надсилається до сисних сигналів, який буде, у свою чергу, формувати теми контролю положення важеля на етапі 3. На вихідний сигнал 59, який вказує присутність або етапі 4, в пласті визначається реальне вертикальвідсутність ідентифіковуваної по температурі струне положення гірничого комбайну 9. На етапі 5, ктури у видобутій копалині. Таким чином, у цьому об'єднані система виявлення положення смуги або варіанті виконання, блок 49 для обробки сигналів характеристики 33 і система виявлення стику заможе реєструвати або розмір принаймні однієї безпечують здатність визначення вертикального ділянки температурного контрасту або перевиположення для надання контуру керування. щення температурою ділянки температурного конСистема вищезгаданого типу використовуєтьтрасту порогової величини температури. ся в автоматизованих контрольних системах для У винахід можуть вноситися модифікації, як це видобування вугілля при розробці довгими забояповинно бути очевидним фахівцям у галузі контми і мінімізує пошкодження обладнання з одночаролю роботи гірничих комбайнів. Ці та інші модисним збільшенням продуктивності та покращенням фікації можуть вноситися без виходу за рамки вибезпеки персоналу. Використовуючи тут ці спосонаходу, суть якого повинна визначатися з би, для роботи буде не потрібна зовнішня еталонвищезгаданого опису. на інфраструктура, така як радіомаяки, маркери, 23 89535 24 25 89535 26 27 89535 28 29 89535 30 31 89535 32 33 89535 34 35 89535 36 37 Комп’ютерна верстка А. Рябко 89535 Підписне 38 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and apparatus for horizon control in a mining operation and device to implement it
Автори англійськоюRalston Jonathan Carey, Hargrave Chad Owen, Makphee Ronald John, Heansworth David William, Reid David Charles, Kelly Michael Shawn
Назва патенту російськоюСпособ контроля горизонта при разработке месторождения и устройство для его осуществления, способ идентификации структуры полезного ископаемого и устройство для его осуществления
Автори російськоюРелстон Джонатон Кери, Харгрейв Чад Оуен, Макфи Рональд Джон, Хейнсворт Девид Уильям, Райд Девид Чарльз, Келли Майкл Шоун
МПК / Мітки
МПК: E21C 35/08
Мітки: пристрій, горизонту, корисної, структури, контролю, копалини, родовища, розробці, здійснення, ідентифікації, спосіб
Код посилання
<a href="https://ua.patents.su/19-89535-sposib-kontrolyu-gorizontu-pri-rozrobci-rodovishha-ta-pristrijj-dlya-jjogo-zdijjsnennya-sposib-identifikaci-strukturi-korisno-kopalini-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю горизонту при розробці родовища та пристрій для його здійснення, спосіб ідентифікації структури корисної копалини та пристрій для його здійснення</a>
Спосіб фронтальної шнекової виїмки корисної копалини “бфшв”
Номер патенту: 13662
Опубліковано: 17.04.2006
Автор: Литвинський Гаррі Григорович
МПК: E21C 27/00
Мітки: корисної, фронтально, шнекової, копалини, виїмки, спосіб, бфшв
Формула / Реферат:
1. Спосіб фронтальної шнекової виїмки корисної копалини, що включає вибурювання з підготовчої виробки свердловини збірно-розбірним шнековим поставом і транспортування корисної копалини по лаві шнеком до підготовчої виробки, який відрізняється тим, що у процесі вибурювання свердловини й нарощування шнекового поставу його одночасно притискають до стінки свердловини за допомогою котків, розташованих поряд із поставом, й тим самим пересувають...
Пристрій для визначення об’єму газовиділення з вибою корисної копалини
Номер патенту: 5203
Опубліковано: 28.12.1994
Автор: Паршиков Микола Борисович
МПК: E21F 5/00
Мітки: газовиділення, пристрій, копалини, об'єму, корисної, вибою, визначення
Формула / Реферат:
(57) Устройство для определения объема газовыделения с забоя полезного ископаемого, включающее газосъемную камеру, установленную открытой стороной к забою, однополостную вакуумную камеру, связанную с насосом, измерительный прибор, отличающееся тем, что газосъемная камера снабжена П-образным ободом с несущими элементами и боковыми стенками, выполненными из эластичного материала, расположенным по периметру поверхности, примыкающей к забою...
Застосування чанового випарника (тостера-десольвентизатора) як пристрою для відгону розчинника із твердої корисної копалини (бурого вугілля) після його екстракції
Номер патенту: 20328
Опубліковано: 15.01.2007
Автори: Соколик Василь Михайлович, Бєлов Олександр Павлович
МПК: C10G 73/00
Мітки: застосування, бурого, розчинника, твердої, корисної, копалини, екстракції, відгону, чанового, пристрою, вугілля, випарника, тостера-десольвентизатора
Формула / Реферат:
Застосування чанового випарника (тостера-десольвентизатора) як пристрою для відгону розчинника із твердої корисної копалини (бурого вугілля) після його екстракції з метою одержання буровугільного (гірського) воску.
Спосіб видобутку такої корисної копалини, як нафта і газ
Номер патенту: 50785
Опубліковано: 15.11.2002
Автори: Морген Джеймс Чарльз, Гудуін Стівен Пол, Стюарт Невін Джон, Коллінс Йен Ральф
Мітки: копалини, такої, нафта, корисної, видобутку, газ, спосіб
Формула / Реферат:
1. Спосіб видобутку такої корисної копалини, як нафта і газ, із підземної формації, що містить нафту чи газ, який відрізняється тим, що в цю формацію інжектують водну композицію, що включає щонайменше 1 мас. % щонайменше одного моноалкілового ефіру поліетиленгліколю, в якому алкільна група містить 3-5 атомів вуглецю, а поліетиленгліколь містить 3-6 етиленоксиланок, і видобувають нафту і/або газ, причому цей спосіб не передбачає обробку...
Спосіб добування корисної копалини
Номер патенту: 24060
Опубліковано: 31.08.1998
Автори: Кіпко Олександр Ернестович, Зуев Володимир Миронович, Ткаченко Сергій Іванович, Левченко Віталій Олексійович, Полозов Юрій Аркадійович, Рудаков Валерій Володимирович, Лагунов Володимир Андрійович, Новік Павло Євгенійович, Спічак Юрій Миколайович, Кіпко Ернест Якович, Тельних Микола Микитович, Попов Олександр Валерійович, Сафонов Лев Олексійович, Левчинський Григорій Семенович
МПК: E21C 41/16
Мітки: копалини, корисної, добування, спосіб
Формула / Реферат:
1. Способ добычи полезного ископаемого, включающий разрушение и выемку полезного ископаемого бурением скважины, его погрузку и транспортирование, ликвидацию выработанного пространства скважин заполнением его закладочным материалом, отличающийся тем, что выемку киберлитовой руды бурением скважин с поверхности земли осуществляют разбуриванием нисходящих скважин последовательно от скважины к скважине, при этом разработку начинают с центра...
Попередній патент: Спосіб та агрегат для піролізу шин
Наступний патент: Аніліди тіазолкарбонової кислоти та анілінові сполуки
Випадковий патент: Пристрій для вимірювання струму короткого замикання