Кранові ваги
Номер патенту: 11510
Опубліковано: 15.12.2005
Автори: Нікітінський Олег Георгійович, Гуркуш Сергій Вікторович, Глазунов Павел Іванович

Формула / Реферат
Кранові ваги, що містять два силовимірювальні датчики, зв'язані електричним ланцюгом з вторинним вимірювальним пристроєм, які відрізняються тим, що силовимірювальні датчики, розміщені в захистних корпусах, з'єднані між собою за допомогою перемички і осей з можливістю вільного пересування у вертикальній площині відносно один одного, та вмонтовані в ланцюг вантажних замикальних канатів.
Текст
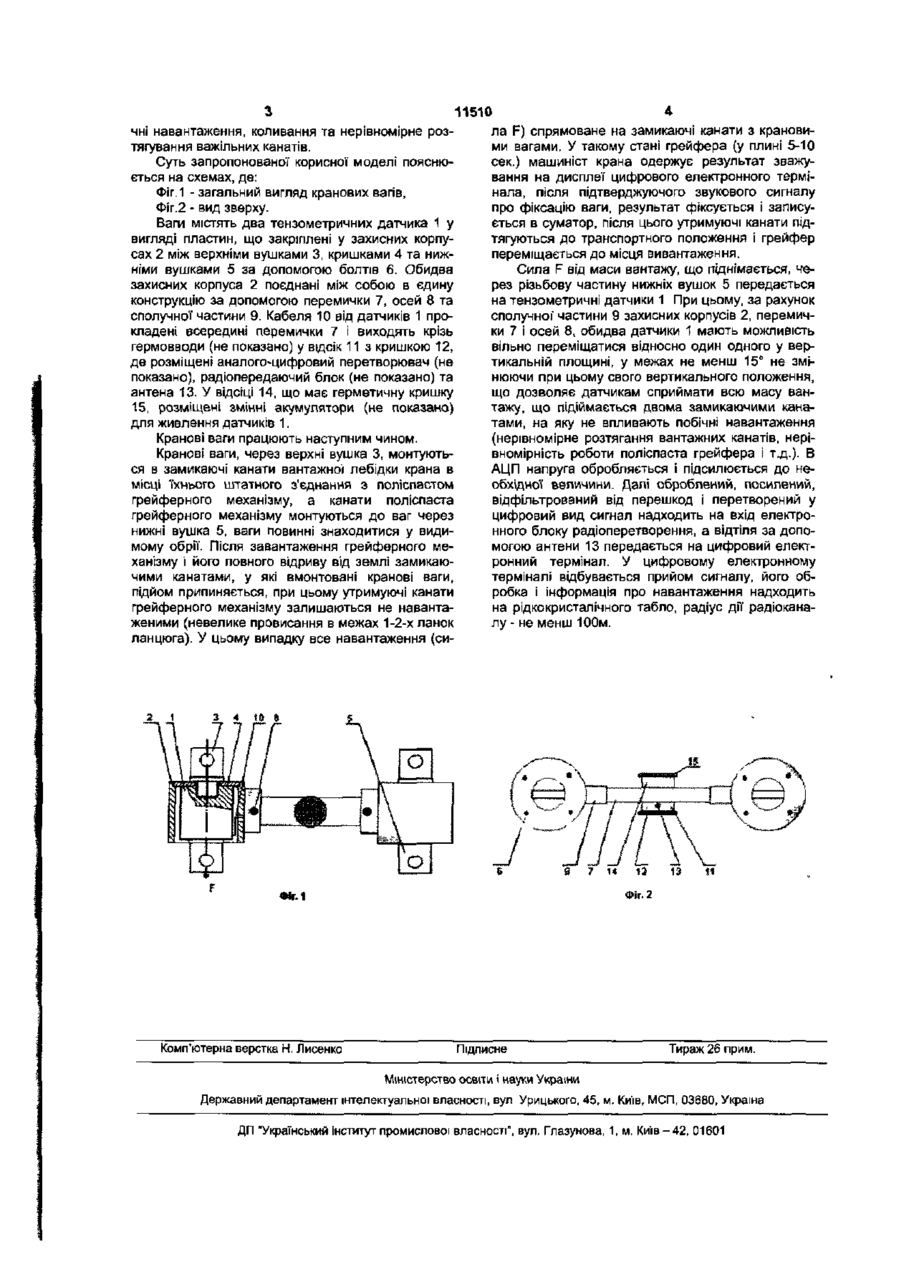
Кранові ваги, що містять два силовимірювальні датчики, зв'язані електричним ланцюгом з вторинним вимірювальним пристроєм, які відрізняються тим, що силовимірювальні датчики, розміщені в захистних корпусах, з'єднані між собою за допомогою перемички і осей з можливістю вільного пересування у вертикальній площині відносно один одного, та вмонтовані в ланцюг вантажних замикальних канатів. Корисна модель відноситься до галузі підіймально-транспортного машинобудування, а саме, пристроїв для зважування вантажів на підіймальних кранах, що призначені для роботи з чотирьохканатними грейферними механізмами, електромагнітами або крюковою підвіскою. Відомий пристрій для зважування вантажів [Патент РФ №2 119 648, G01G19/14, приор. 18.04.97, опубл.27.09 98], що містить вантажотранспортний механізм з встановленими на ньому силовимірювальними датчиками, які електричне поєднані з підсилювально-перетворюючим блоком, а їх основи підтиснуті пружиною. Недоліком даного пристрою є жорстка конструкція, яка тягне за собою зміну показників при перерозподілі маси вантажу, що підіймають та нерівномірність розтягнення вантажних канатів, що призводить до помилки результатів зважування Найбільш близьким до заявленого є кранові ваги [Патент України №19749, G01G19/14, приор. 23 12.92, опубл. 25.12.97, бюл №6], що містять передаючий важіль і балансир, виконані складеними у вигляді двох щок, в середині яких розміщені два підпружинених силовимірювальних датчика, зв'язані електричним ланцюгом з вторинним вимірювальним пристроєм Навантаження від маси вантажа, що підіймають, передається на датчики через щоки. В процесі роботи, із-за кручення вантажних канатів під навантаженням відбувається поздовжнє зміщення щок відносно осі обертання, виникає ефект тертя, що обумовлює низьку точність визначення маси вантажа, який підіймають. Крім того, наявність пружини, що утримує датчики у вихідному положенні, також приводить до зміни показників вагів під час експлуатації із-за її природного зношування. В основу корисної моделі поставлена задача вдосконалення кранових вагів, в яких шляхом модифікації' в розміщенні силовимірювальних датчиків забезпечується підвищення точності вимірювання маси вантажа, який підіймають. Поставлена задача вирішується тим, що кранові ваги, що містять два силовимірювальні датчики, зв'язані електричним ланцюгом з вторинним вимірювальним пристроєм, згідно з корисною моделлю, силовимірювальні датчики, розміщені в захистних корпусах, поєднані між собою за допомогою перемички і осей з можливістю вільного пересування у вертикальній площині відносно один одного, та вмонтовані в ланцюг вантажних замикаючих канатів. Причинно-наслідковий зв'язок полягає у наступному. Розміщення силовимірюючих датчиків з можливістю вільного пересування відносно один одного у вертикальній площині, дозволяє сприймати усю масу вантажа, що підіймається, і отримати результат зважування з точністю до 0,1% від найбільшої межі зважування. Кранові ваги, вмонтовані в ланцюг вантажних замикаючих канатів, що дозволяє отримати точний результат зважування, на який не впливають побі 11510 чні навантаження, коливання та нерівномірне розтягування важільних канатів. Суть запропонованої корисної моделі пояснюється на схемах, де: Фіг.1 - загальний вигляд кранових вагів, Фіг.2 - вид зверху. Ваги містять два тензометричних датчика 1 у вигляді пластин, що закріплені у захисних корпусах 2 між верхніми вушками 3, кришками 4 та нижніми вушками 5 за допомогою болтів 6. Обидва захисних корпуса 2 поєднані між собою в єдину конструкцію за допомогою перемички 7, осей 8 та сполучної частини 9. Кабеля 10 від датчиків 1 прокладені всередині перемички 7 і виходять крізь гермовводи (не показано) у відсік 11 з кришкою 12, де розміщені аналого-цифровий перетворювач (не показано), радіопередаючий блок (не показано) та антена 13. У відсіці 14, що має герметичну кришку 15, розміщені змінні акумулятори (не показано) для живлення датчиків 1. Кранові ваги працюють наступним чином. Кранові ваги, через верхні вушка 3, монтуються в замикаючі канати вантажної лебідки крана в місці їхнього штатного з'єднання з поліспастом грейферного механізму, а канати поліспаста грейферного механізму монтуються до ваг через нижні вушка 5, ваги повинні знаходитися у видимому обрії. Після завантаження грейферного механізму і його повного відриву від землі замикаючими канатами, у які вмонтовані кранові ваги, підйом припиняється, при цьому утримуючі канати грейферного механізму залишаються не навантаженими (невелике провисання в межах 1-2-х ланок ланцюга). У цьому випадку все навантаження (си 2 1 3 4 ла F) спрямоване на замикаючі канати з крановими вагами. У такому стані грейфера (у плині 5-Ю сек.) машиніст крана одержує результат зважування на дисплеї цифрового електронного термінала, після підтверджуючого звукового сигналу про фіксацію ваги, результат фіксується і записується в суматор, після цього утримуючі канати підтягуються до транспортного положення і грейфер переміщається до місця вивантаження. Сила F від маси вантажу, що піднімається, через різьбову частину нижніх вушок 5 передається на тензометричні датчики 1 При цьому, за рахунок сполучної частини 9 захисних корпусів 2, перемички 7 і осей 8, обидва датчики 1 мають можливість вільно переміщатися відносно один одного у вертикальній площині, у межах не менш 15° не змінюючи при цьому свого вертикального положення, що дозволяє датчикам сприймати всю масу вантажу, що підіймається двома замикаючими канатами, на яку не впливають побічні навантаження (нерівномірне розтягання вантажних канатів, нерівномірність роботи поліспаста грейфера і т.д.). В АЦП напруга обробляється і підсилюється до необхідної величини. Далі оброблений, посилений, відфільтрований від перешкод і перетворений у цифровий вид сигнал надходить на вхід електронного блоку радіоперетворення, а відтіля за допомогою антени 13 передається на цифровий електронний термінал. У цифровому електронному терміналі відбувається прийом сигналу, його обробка і інформація про навантаження надходить на рідкокристалічного табло, радіус дії радіоканалу- не менш 100м. 16 ФІГ.1 Комп'ютерна верстка Н. Лисенко Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул. Глазунова, 1, м. Київ-42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюCrane weigher
Назва патенту російськоюКрановые весы
МПК / Мітки
МПК: G01G 19/00, B66C 13/00
Код посилання
<a href="https://ua.patents.su/2-11510-kranovi-vagi.html" target="_blank" rel="follow" title="База патентів України">Кранові ваги</a>
Кранові ваги
Номер патенту: 33488
Опубліковано: 15.02.2001
Автори: Раздобаров Віктор Георгійович, Лісовий Віталій Васильович, Трояновський Анатолій Сергійович, Онода Констянтин Констянтинович, Сацюк Валерій Іванович, Архіпов Олександр Миколайович, Чаков Олександр Миколайович, Горлов Генадій Васильович
МПК: G01G 19/00
Текст:
...в робочому стані (наприклад пази з болтами, направляючі і т.п.) наконечники пружних елементів контакт ують безпос ередньо з силовимірювальними датчиками, основи яких встановлені на корпусі блока; пластини пружних елементів окрім того наділені пружними шарнірами . Між сукупністю ознак та досягнутим технічним результатом існує слідуючий причинно - наслідковий зв'язок . Пружний силопередаючий елемент завдяки можливості переміщення у...
Кранові ваги
Номер патенту: 55151
Опубліковано: 17.03.2003
Автори: Дорофєєв Володимир Миколайович, Самчелєєв Юрій Павлович, Дрючин Віктор Гаврилович
МПК: G01G 19/00, B66C 13/00
Формула / Реферат:
Кранові ваги, що містять силовимірювальний датчик з аналого-цифровим перетворювачем на виході, пристрій індикації ваги, датчик температури з перетворювачем сигналу на виході, масштабуючі підсилювачі та послідовно з ними ввімкнені аналого-цифрові перетворювачі, послідовно ввімкнені перші суматор та помножувач, при цьому вихід перетворювача сигналів зв'язаний з входами зазначених суматора та помножувача через відповідні масштабуючі підсилювачі...
Кранові ваги

Номер патенту: 19749
Опубліковано: 25.12.1997
Автор: Коломієць Леонід Володимирович
МПК: G01G 19/00
Формула / Реферат:
Крановые весы, содержащие передающий рычаг, силоизмерительный датчик, установленный в балансире и связанный электрической цепью со вторичным измерительным прибором, отличающиеся тем, что передающий рычаг и балансир выполнены составными в виде двух щек, внутри которых расположены два силоизмерительных датчика со сферическими силовоспринимающими поверхностями, при этом сферические силовоспринимающие поверхности силоизмерительных датчиков...
Підвісні кранові ваги
Номер патенту: 12552
Опубліковано: 28.02.1997
Автори: Цимбал Борис Михайлович, Санкін Анатолій Алексійович, Струтинський Микола Сергійович, Богдан Кім Степанович, Мазуренко Іван Павлович
МПК: G01G 19/08, B66C 13/00
Мітки: ваги, підвісні, кранові
Формула / Реферат:
Подвесные крановые весы, содержащие корпус с крышкой, связанный посредством троса с приводом подъема крана, размещенные в корпусе силоизмерительный датчик, узел силовведения, блок питания и аппаратуру визуальной индикации результатов взвешивания, отличающиеся тем, что узел силовведения выполнен в виде двух упругих элементов различной жесткости, соединенных последовательно через пластину, в центре которой шарнирно укреплен грузоподъемный...
Низькопрофільні ваги для зважування залізничного транспорту
Номер патенту: 63031
Опубліковано: 15.01.2004
Автори: Капітельман Леонід Вільямович, Нікітінський Михайло Павлович, Докаленко Сергій Анатолійович
МПК: B60S 5/00, G01G 19/00
Мітки: зважування, низькопрофільні, транспорту, ваги, залізничного
Формула / Реферат:
1. Низькопрофільні ваги для зважування залізничного транспорту, які містять вантажоприймальну платформу, пристрій силовведення, встановлені на фундаменті силовимірювальні модулі з тензодатчиками, які відрізняються тим, що силовимірювальні модулі з тензодатчиками розташовані перед стиками рейок під'їзного шляху з рейками вантажоприймальної платформи та вписані по висоті у кінцеві опорні частини подовжніх балок вантажоприймальної платформи,...
Попередній патент: Спосіб визначення параметрів підземної тріщини під час і після проведення гідророзриву пласта
Наступний патент: Установка для випробувань водолічильників
Випадковий патент: Спосіб лікування інтрамурального ходу коронарної артерії при супутній хірургічній кардіальній патології шляхом епікардіотомії