Інтегрована навігаційна система
Формула / Реферат
1. Інтегрована навігаційна система, що містить супутникову навігаційну систему, датчики швидкості судна та блок обробки сигналів, яка відрізняється тим, що у склад системи уведені ехолот, датчик кроку гвинта регульованого кроку, тахогенератор головного двигуна, тахогенератор підрулювального пристрою, датчик кута пера руля, приєднані до відповідних узгоджувальних схем.
2. Система за п. 1, яка відрізняється тим, що містить дві виносні панелі індикації, які розміщені на крилах містка.
Текст
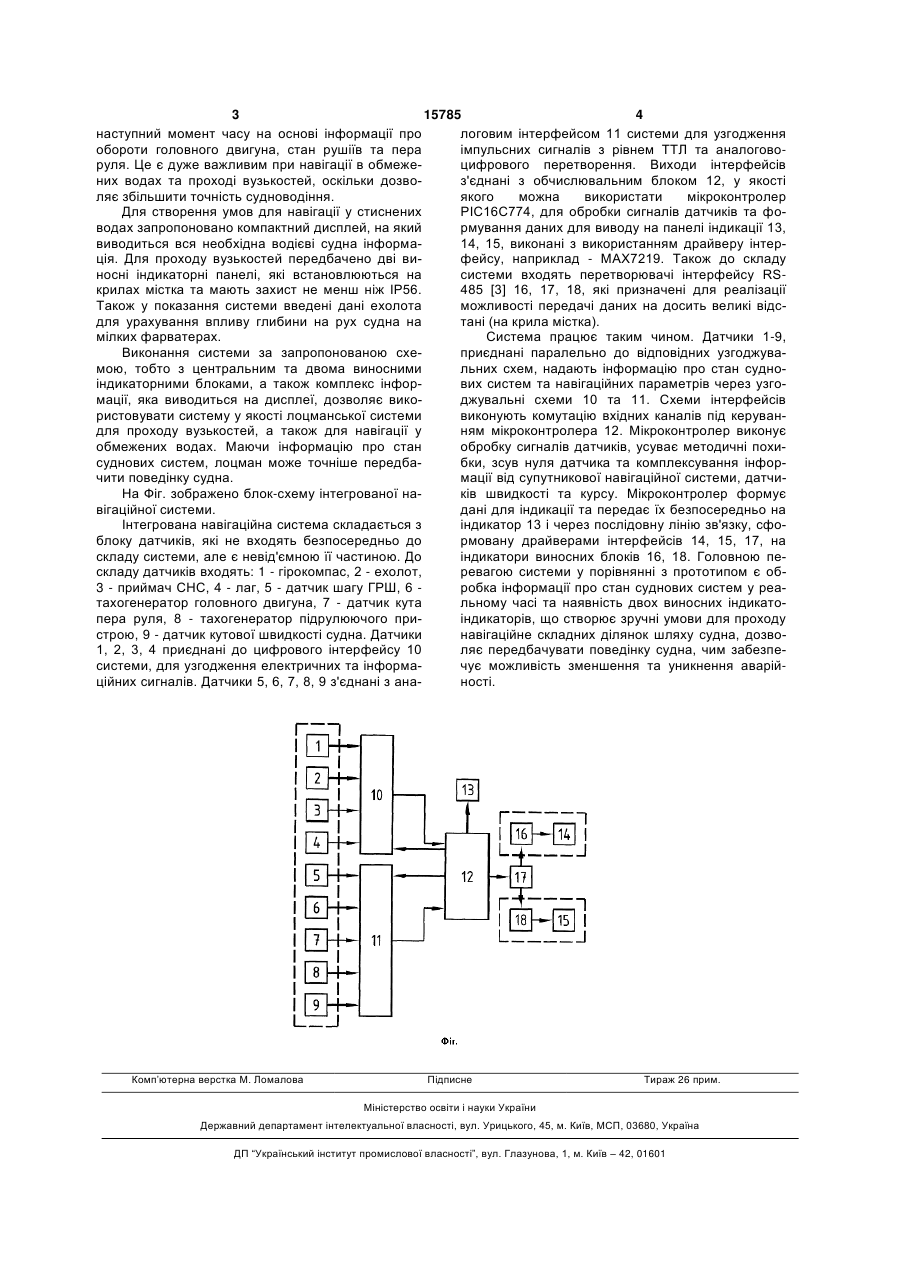
1. Інтегрована навігаційна система, що містить супутникову навігаційну систему, датчики швидко 3 15785 4 наступний момент часу на основі інформації про логовим інтерфейсом 11 системи для узгодження обороти головного двигуна, стан рушіїв та пера імпульсних сигналів з рівнем ТТЛ та аналоговоруля. Це є дуже важливим при навігації в обмежецифрового перетворення. Виходи інтерфейсів них водах та проході вузькостей, оскільки дозвоз'єднані з обчислювальним блоком 12, у якості ляє збільшити точність судноводіння. якого можна використати мікроконтролер Для створення умов для навігації у стиснених РІС16С774, для обробки сигналів датчиків та фоводах запропоновано компактний дисплей, на який рмування даних для виводу на панелі індикації 13, виводиться вся необхідна водієві судна інформа14, 15, виконані з використанням драйверу інтерція. Для проходу вузькостей передбачено дві вифейсу, наприклад - МАХ7219. Також до складу носні індикаторні панелі, які встановлюються на системи входять перетворювачі інтерфейсу RSкрилах містка та мають захист не менш ніж ІР56. 485 [3] 16, 17, 18, які призначені для реалізації Також у показання системи введені дані ехолота можливості передачі даних на досить великі відсдля урахування впливу глибини на рух судна на тані (на крила містка). мілких фарватерах. Система працює таким чином. Датчики 1-9, Виконання системи за запропонованою схеприєднані паралельно до відповідних узгоджувамою, тобто з центральним та двома виносними льних схем, надають інформацію про стан судноіндикаторними блоками, а також комплекс інфорвих систем та навігаційних параметрів через узгомації, яка виводиться на дисплеї, дозволяє викоджувальні схеми 10 та 11. Схеми інтерфейсів ристовувати систему у якості лоцманської системи виконують комутацію вхідних каналів під керувандля проходу вузькостей, а також для навігації у ням мікроконтролера 12. Мікроконтролер виконує обмежених водах. Маючи інформацію про стан обробку сигналів датчиків, усуває методичні похисуднових систем, лоцман може точніше передбабки, зсув нуля датчика та комплексування інфорчити поведінку судна. мації від супутникової навігаційної системи, датчиНа Фіг. зображено блок-схему інтегрованої наків швидкості та курсу. Мікроконтролер формує вігаційної системи. дані для індикації та передає їх безпосередньо на Інтегрована навігаційна система складається з індикатор 13 і через послідовну лінію зв'язку, сфоблоку датчиків, які не входять безпосередньо до рмовану драйверами інтерфейсів 14, 15, 17, на складу системи, але є невід'ємною її частиною. До індикатори виносних блоків 16, 18. Головною пескладу датчиків входять: 1 - гірокомпас, 2 - ехолот, ревагою системи у порівнянні з прототипом є об3 - приймач СНС, 4 - лаг, 5 - датчик шагу ГРШ, 6 робка інформації про стан суднових систем у реатахогенератор головного двигуна, 7 - датчик кута льному часі та наявність двох виносних індикатопера руля, 8 - тахогенератор підрулюючого приіндикаторів, що створює зручні умови для проходу строю, 9 - датчик кутової швидкості судна. Датчики навігаційне складних ділянок шляху судна, дозво1, 2, 3, 4 приєднані до цифрового інтерфейсу 10 ляє передбачувати поведінку судна, чим забезпесистеми, для узгодження електричних та інформачує можливість зменшення та уникнення аварійційних сигналів. Датчики 5, 6, 7, 8, 9 з'єднані з ананості. Комп’ютерна верстка М. Ломалова Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюIntegrated navigation system
Назва патенту російськоюИнтегрированная навигационная система
МПК / Мітки
МПК: G01C 21/10
Мітки: система, навігаційна, інтегрована
Код посилання
<a href="https://ua.patents.su/2-15785-integrovana-navigacijjna-sistema.html" target="_blank" rel="follow" title="База патентів України">Інтегрована навігаційна система</a>
Навігаційна система з охоронними функціями для мобільного об’єкта
Номер патенту: 41818
Опубліковано: 17.09.2001
Автори: Барладін Олександр Володимирович, Барладін Петро Олександрович
МПК: G09B 29/10
Мітки: навігаційна, мобільного, охоронними, система, функціями, об'єкта
Формула / Реферат:
1. Навігаційна система з охоронними функціями для мобільного об'єкта, що містить з'єднані між собою модуль управління, дисплей, картографічний модуль, модуль визначення координат і модуль прийому-передачі радіосигналу, яка відрізняється тим, що обладнана додатково автономним джерелом живлення і модулем стану, з'єднаним із модулем визначення координат, модуль управління обладнаний контролером для мобільного телефону, при цьому блок управління,...
Комплексна навігаційна система
Номер патенту: 42148
Опубліковано: 15.10.2001
Автор: Бакулін Ігор Євгенович
МПК: G01C 23/00
Мітки: навігаційна, система, комплексна
Формула / Реферат:
Комплексна навігаційна система, що включає інерційну навігаційну систему з використанням як коригований вимірювач, перший і другий відраховувальні пристрої і високоточну кореляційно - екстремальну навігаційну систему з використанням як коригувальний вимірювач, яка відрізняється тим, що у пристрій додатково введені електронний ключ, запам'ятовувальний пристрій і блок керування, причому послідовно з'єднані електронний ключ і запам'ятовувальний...
Мікрохвильова інтегрована телерадіоінформаційна система мітріс ком
Номер патенту: 55552
Опубліковано: 15.04.2003
Автори: Ксьонзенко Петро Якович, Казіміренко Валерій Якович, Денисенко Володимир Миколайович, Наритник Теодор Миколайович, Ільченко Михайло Юхимович, Згуровський Михайло Захарович, Дашевський Андрій Борисович, Гордійчук Михайло Михайлович, Войтенко Олександр Григорович
МПК: H04B 7/165
Мітки: інтегрована, мікрохвильова, система, ком, телерадіоінформаційна, мітріс
Формула / Реферат:
1. Мікрохвильова інтегрована телерадіоінформаційна система МІТРІС КОМ, що складається з підсистем прийому, формування та опрацювання інформації, центральної станції, яка містить багатоканальний НВЧ передавач із блоками частотної модуляції, сполученими з блоками фільтрації, посилення і перетворення частотно-модульованих сигналів у короткохвильову частину сантиметрового діапазону хвиль, усі канали НВЧ передавача об'єднані з підключенням виходів...
Мікрохвильова інтегрована телерадіоінформаційна система “мітріс-м”
Номер патенту: 44933
Опубліковано: 15.03.2002
Автори: Наритник Теодор Миколайович, Шульга Владислав Васильович, Понеділко Віктор Іванович, Малєв Валерій Іванович, Денисенко Володимир Миколайович, Гордійчук Михайло Михайлович, Ксензенко Петро Якович
МПК: H04B 7/165
Мітки: система, інтегрована, мікрохвильова, мітріс-м, телерадіоінформаційна
Формула / Реферат:
1. Мікрохвильова інтегрована телерадіоінформаційна система «МІТРІС-М», що складається з підсистеми прийому, формування й обробки інформації, центральної станції, що включає в себе НВЧ - передавач, передавальну антену, сполучену з НВЧ- передавачем лінією передачі, абонентських приймальних станцій, що включають у себе антену, конвертер і тюнер, а також ретрансляторів, яка відрізняється тим, що до складу центральної станції введений...
Мікрохвильова інтегрована телерадіоінформаційна система “мітріс-к”
Номер патенту: 50877
Опубліковано: 15.11.2002
Автори: Наритник Теодор Миколайович, Побережний Олег Васильович, Савченко Олексій Якович, Войтенко Олександр Григорович, Ільченко Михайло Юхимович, Казіміренко Валерій Якович, Плаксюк Юрій Олександрович
МПК: H04B 7/165
Мітки: інтегрована, мікрохвильова, мітріс-к, система, телерадіоінформаційна
Формула / Реферат:
1. Мікрохвильова інтегрована телерадіоінформаційна система "МІТРІС- К", що складається з підсистем прийому, формування та опрацювання інформації, центральної станції, яка містить багатоканальний НВЧ передавач із блоками частотної модуляції, сполученими з блоками фільтрації, посилення і перетворення частотно-модульованих сигналів у короткохвильову частину сантиметрового діапазону хвиль, усі канали НВЧ передавача об'єднані з...
Попередній патент: Пристрій для розміщення внутрішньої реклами
Наступний патент: Цифровий модулятор
Випадковий патент: Спосіб контактного стикового зварювання безперервним оплавленням