Спосіб позиціювання довгомірних вантажів і пристрій для його здійснення
Номер патенту: 17826
Опубліковано: 03.06.1997
Автори: Зінько Роман Володимирович, Козлинський Мирослав Петрович
Формула / Реферат
1. Спосіб позиціювання довгомірних вантажів, при якому піднімають вантаж, захоплюють його гаками двотаврової балки, позиціонують, вирівнюючи в ряд, який відрізняється тим, що позиціювання здійснюють шляхом врівноважування.
2. Спосіб позиціювання за п. 1, який відрізняється тим, що вантаж врівноважують, визначивши наявність кута перекосу двотаврової балки вантажопідйомного механізму.
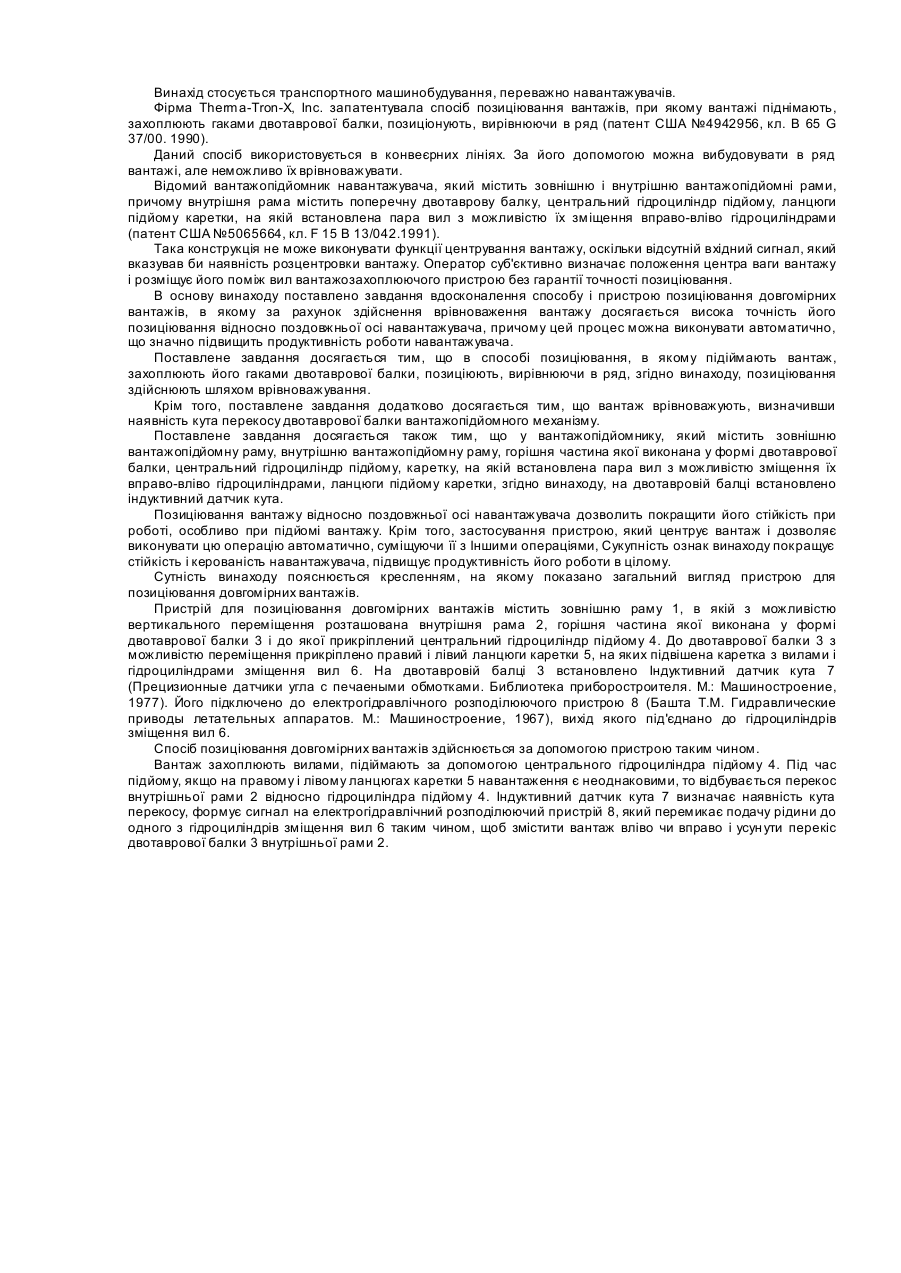
3. Пристрій для позиціювання довго-мірних вантажів, який містить зовнішню вантажопідйомну раму, внутрішню вантажопідйомну раму, горішня частина якої виконана у формі двотаврової балки, центральний гідроциліндр підйому, каретку, на якій встановлена пара вил з можливістю їх зміщення вправо-вліво гідроциліндрами, ланцюги підйому каретки, який відрізняється тим, що на двотавровій балці встановлено Індуктивний датчик кута.
Текст
Винахід стосується транспортного машинобудування, переважно навантажувачів. Фірма Therma-Tron-X, Inc. запатентувала спосіб позиціювання вантажів, при якому вантажі піднімають, захоплюють гаками двотаврової балки, позиціонують, вирівнюючи в ряд (патент США №4942956, кл. В 65 G 37/00. 1990). Даний спосіб використовується в конвеєрних лініях. За його допомогою можна вибудовувати в ряд вантажі, але неможливо їх врівноважувати. Відомий вантажопідйомник навантажувача, який містить зовнішню і внутрішню вантажопідйомні рами, причому внутрішня рама містить поперечну двотаврову балку, центральний гідроциліндр підйому, ланцюги підйому каретки, на якій встановлена пара вил з можливістю їх зміщення вправо-вліво гідроциліндрами (патент США №5065664, кл. F 15 В 13/042.1991). Така конструкція не може виконувати функції центрування вантажу, оскільки відсутній вхідний сигнал, який вказував би наявність розцентровки вантажу. Оператор суб'єктивно визначає положення центра ваги вантажу і розміщує його поміж вил вантажозахоплюючого пристрою без гарантії точності позиціювання. В основу винаходу поставлено завдання вдосконалення способу і пристрою позиціювання довгомірних вантажів, в якому за рахунок здійснення врівноваження вантажу досягається висока точність його позиціювання відносно поздовжньої осі навантажувача, причому цей процес можна виконувати автоматично, що значно підвищить продуктивність роботи навантажувача. Поставлене завдання досягається тим, що в способі позиціювання, в якому підіймають вантаж, захоплюють його гаками двотаврової балки, позиціюють, вирівнюючи в ряд, згідно винаходу, позиціювання здійснюють шляхом врівноважування. Крім того, поставлене завдання додатково досягається тим, що вантаж врівноважують, визначивши наявність кута перекосу двотаврової балки вантажопідйомного механізму. Поставлене завдання досягається також тим, що у вантажопідйомнику, який містить зовнішню вантажопідйомну раму, внутрішню вантажопідйомну раму, горішня частина якої виконана у формі двотаврової балки, центральний гідроциліндр підйому, каретку, на якій встановлена пара вил з можливістю зміщення їх вправо-вліво гідроциліндрами, ланцюги підйому каретки, згідно винаходу, на двотавровій балці встановлено індуктивний датчик кута. Позиціювання вантажу відносно поздовжньої осі навантажувача дозволить покращити його стійкість при роботі, особливо при підйомі вантажу. Крім того, застосування пристрою, який центрує вантаж і дозволяє виконувати цю операцію автоматично, суміщуючи її з Іншими операціями, Сукупність ознак винаходу покращує стійкість і керованість навантажувача, підвищує продуктивність його роботи в цілому. Сутність винаходу пояснюється кресленням, на якому показано загальний вигляд пристрою для позиціювання довгомірних вантажів. Пристрій для позиціювання довгомірних вантажів містить зовнішню раму 1, в якій з можливістю вертикального переміщення розташована внутрішня рама 2, горішня частина якої виконана у формі двотаврової балки 3 і до якої прикріплений центральний гідроциліндр підйому 4. До двотаврової балки 3 з можливістю переміщення прикріплено правий і лівий ланцюги каретки 5, на яких підвішена каретка з вилами і гідроциліндрами зміщення вил 6. На двотавровій балці 3 встановлено Індуктивний датчик кута 7 (Прецизионные датчики угла с печаеными обмотками. Библиотека приборостроителя. Μ.: Машиностроение, 1977). Його підключено до електрогідравлічного розподілюючого пристрою 8 (Башта Т.М. Гидравлические приводы летательных аппаратов. Μ.: Машиностроение, 1967), вихід якого під'єднано до гідроциліндрів зміщення вил 6. Спосіб позиціювання довгомірних вантажів здійснюється за допомогою пристрою таким чином. Вантаж захоплюють вилами, підіймають за допомогою центрального гідроциліндра підйому 4. Під час підйому, якщо на правому і лівому ланцюгах каретки 5 навантаження є неоднаковими, то відбувається перекос внутрішньої рами 2 відносно гідроциліндра підйому 4. Індуктивний датчик кута 7 визначає наявність кута перекосу, формує сигнал на електрогідравлічний розподілюючий пристрій 8, який перемикає подачу рідини до одного з гідроциліндрів зміщення вил 6 таким чином, щоб змістити вантаж вліво чи вправо і усун ути перекіс двотаврової балки 3 внутрішньої рами 2.
ДивитисяДодаткова інформація
Автори англійськоюKozlynskyi Myroslav Petrovych, Zinko Roman Volodymyrovych
Автори російськоюКозлинский Мирослав Петрович, Зинько Роман Владимирович
МПК / Мітки
МПК: B66F 9/06
Мітки: спосіб, вантажів, здійснення, пристрій, довгомірних, позиціювання
Код посилання
<a href="https://ua.patents.su/2-17826-sposib-poziciyuvannya-dovgomirnikh-vantazhiv-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб позиціювання довгомірних вантажів і пристрій для його здійснення</a>
Спосіб центрування довгомірних вантажів і пристрій для його здійснення
Номер патенту: 17486
Опубліковано: 06.05.1997
Автори: Коровець Ігор Володимирович, Козлинський Мирослав Петрович
МПК: B66F 9/06
Мітки: вантажів, довгомірних, спосіб, пристрій, центрування, здійснення
Формула / Реферат:
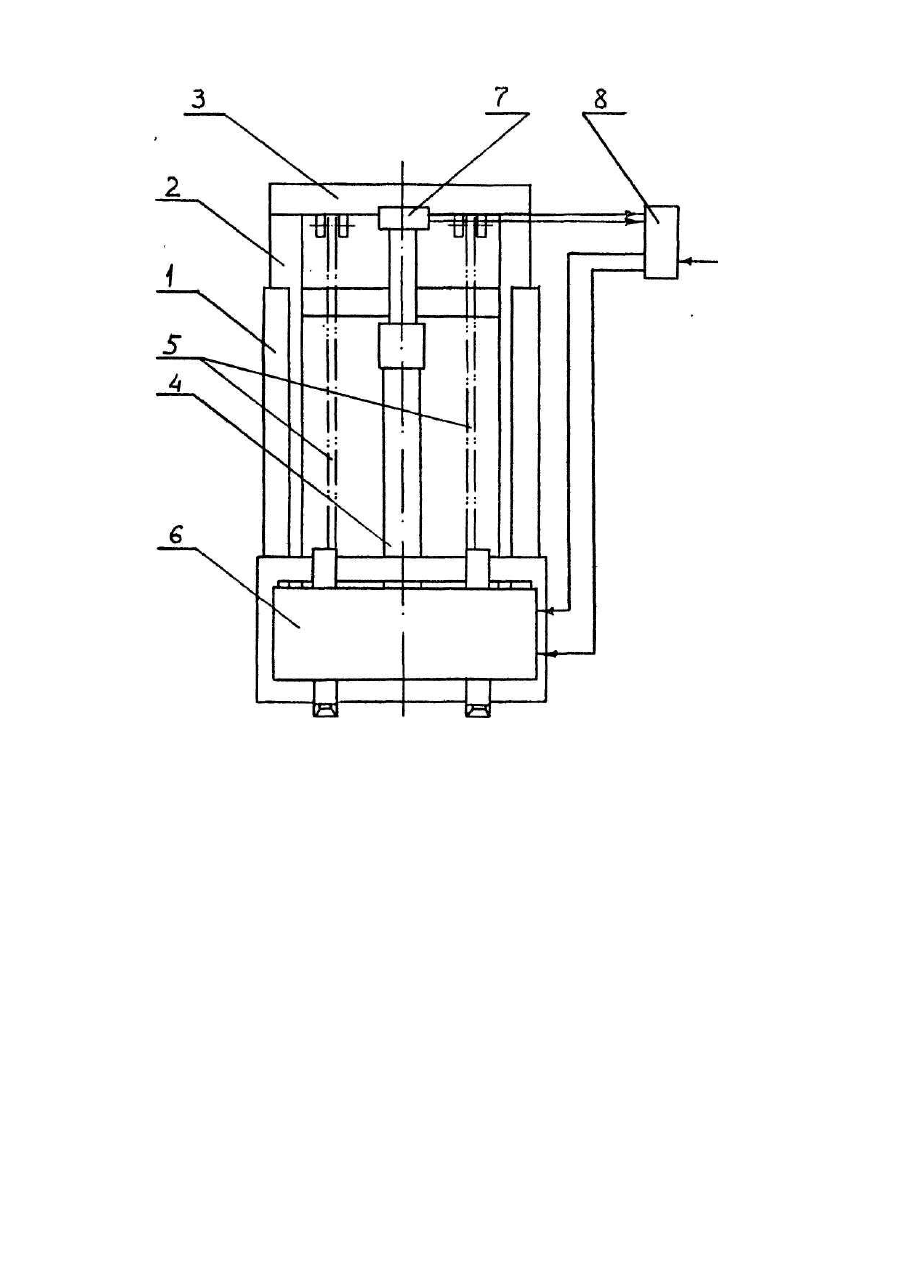
1. Спосіб центрування довгомірних вантажів, який включає в себе взяття вантажу на вила, нахил його на каретку, пересування вантажу до суміщення центру ваги вантажу з поздовжньою віссю захвату, який відрізняється тим, що навантаження, яке діє на каретку, передають на вертикально розміщені вали.2. Пристрій для центрування довгомірних вантажів, який має пару вил круглого січення, змонтованих на каретці навантажувача з можливістю...
Спосіб переміщення довгомірних конструкцій /його варіанти/ і пристрій для його здійснення /його варіанти/
Номер патенту: 4312
Опубліковано: 27.12.1994
Автори: Бічуч Адольф Ілліч, Лещинський Олександр Аронович, Киянов Іван Дмитрович, Шмульський Ліон Маркусович
МПК: E04H 12/34
Мітки: переміщення, конструкцій, довгомірних, спосіб, здійснення, його, пристрій
Формула / Реферат:
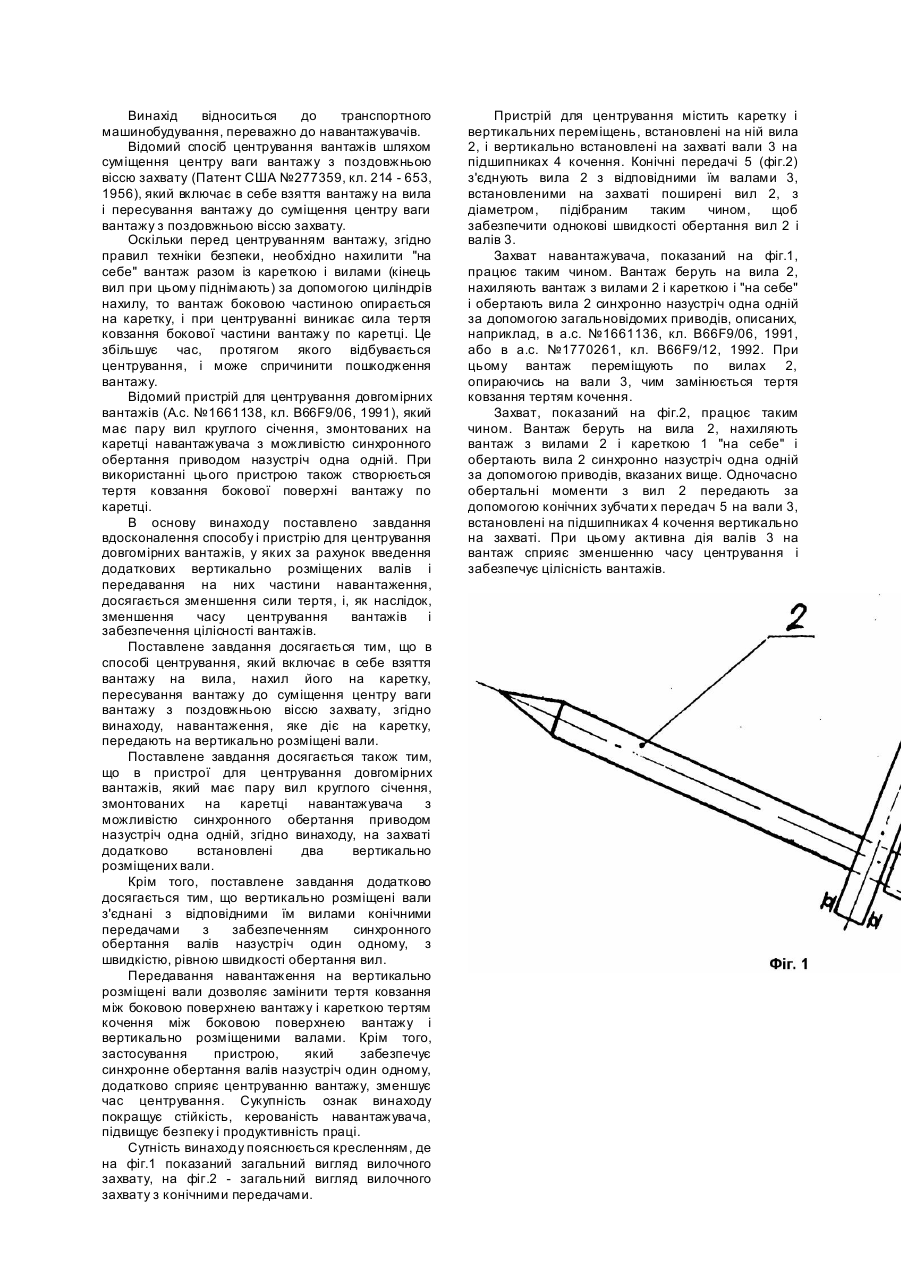
1. Способ перемещения длинномерных тяжеловесных конструкций, заключающийся в том, что поочередно поднимают грузоподъемным средством концы конструкции над одной из двух опор, опирая ее на другую опору, отличающийся тем, что, с целью снижения эксплуатационных расходов на перемещение конструкции, при подъеме одного конца конструкции освободившуюся опору перемещают к другой нагруженной опоре, а при подъеме другого ее конца конструкцию вместе...
Спосіб перевантаження діамагнітних вантажів та пристрій для його здійснення
Номер патенту: 11256
Опубліковано: 25.12.1996
Автори: Збаращенко Віталій Стефановіч, Нунупаров Сергій Мартинович, Орлов Ігорь Борісовіч, Венско Олег Ігоревич, Олевич Павло Васильович, Іонін Сергей Петрович
МПК: B66C 1/00
Мітки: діамагнітних, спосіб, перевантаження, вантажів, здійснення, пристрій
Формула / Реферат:
(57) 1. Способ перегрузки диамагнитных грузов с применением захвата на постоянных магнитах, заключающийся в том, что захват наводят на груз, подают импульс тока в катушку управления магнитом захвата, транспортируют груз вместе с захватом грузоподъемным средством и освобождают груз путем подачи импульса тока обратной полярности, отличающийся тем, что перед наведением захвата на грузе устанавливают грузонесущее средство с магнитом в центральной...
Кантувач довгомірних вантажів
Номер патенту: 10672
Опубліковано: 25.12.1996
Автори: Малінський Леонід Наумович, Опімах Євген Миколайович, Загоровський Володимир Сергійович
Мітки: довгомірних, вантажів, кантувач
Формула / Реферат:
Кантователь длинномерных грузов, содержащий раму, исполнительное устройство с исполнительным органом, рабочий орган, при этом исполнительное устройство выполнено в виде вертикальной колонны, снабженной механизмами подъема и опускания, а также поворота вокруг вертикальной оси, исполнительный орган выполнен в виде стрелы, на одном конце которой смонтирован рабочий орган в виде грузозахватного устройства, при этом стрела содержит также...
Транспортний засіб для перевозки довгомірних і великогабаритних вантажів у похилистому стані
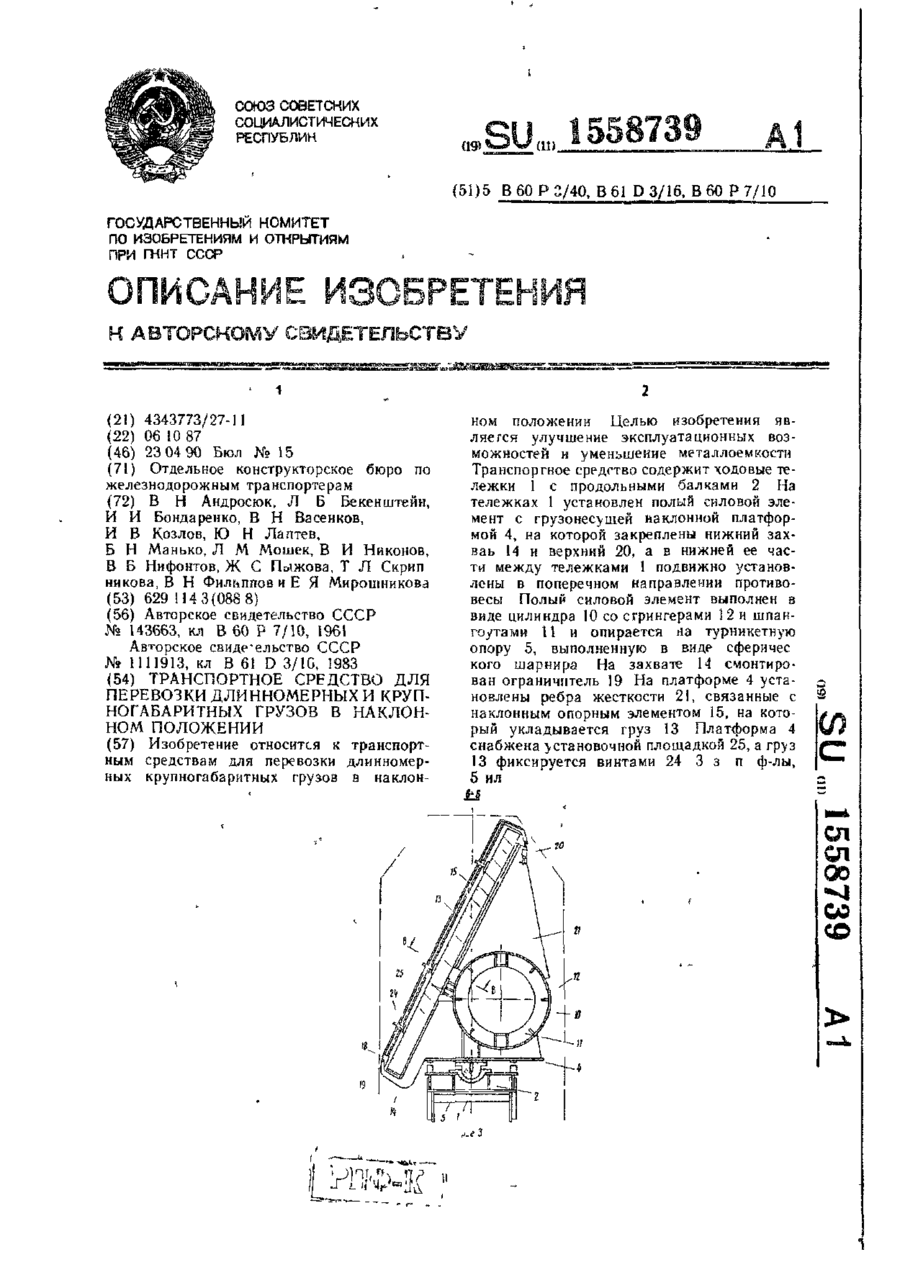
Номер патенту: 11973
Опубліковано: 25.12.1996
Автори: Козлов Ігорь Вікторовіч, Мірошникова Олена Яковлівна, Ніфонтов Вячеслав Борисович, Андросюк Віктор Микитич, Бекенштейн Леонід Борисович, Скрипникова Тетяна Львівна, Лаптєв Юрій Миколаєвич, Васенков Віктор Микитович, Пижова Жана Степанівна, Манько Борис Миколаєвич, Філіпов Віктор Миколаєвич, Мошек Леонід Михайлович, Бондаренко Іван Іванович, Ніконов Віталій Іванович
МПК: B60P 3/40, B60P 7/06, B61D 3/16
Мітки: похилистому, перевозки, засіб, стані, великогабаритних, вантажів, довгомірних, транспортний
Формула / Реферат:
1. Транспортное средство для перевозки длинномерных и крупногабаритных грузов в наклонном положении, содержащее ходовые тележки с турникетными опорами, соединенными полым силовым элементом, несущим грузонесущую наклонную платформу, на которой в нижней и верхней се частях закреплены захваты для груза, и противовесы, установленные с возможностью поперечного перемещения, отличающееся тем, что, с целью улучшения эксплуатационных возможностей...
Попередній патент: Пристрій для розтину судин
Наступний патент: Генератор нвч з електричним перестроюванням частоти
Випадковий патент: Спосіб одержання піриділових або фенілових сполук, або їх гідрохлоридів, або складних ефірів