Спосіб управління асинхронним електроприводом
Формула / Реферат
Способ управления асинхронным электроприводом, при котором формируют мгновенные симметричные фазные напряжения на обмотках статора асинхронного двигателя с амплитудой, частотой и фазой, определяемыми по измеренной скорости и двум входным воздействиям, одно из которых постоянно и соответствует требуемой амплитуде потокосцепления ротора, а другое соответствует моменту, отличающийся тем, что устанавливают граничное значение частоты по измеренной скорости, соответствующее полосе пропускания частот при регулировании тока по отклонению, и при частотах меньших граничного задают мгновенные симметричные фазные токи в обмотках статора с амплитудой, частотой и фазой, определяющиеся по значениям скорости, момента и потокосцепления ротора, измеряют токи фаз двигателя, сравнивают с заданными токами, формируют сигналы, соответствующие их разности, суммируют с мгновенными фазными напряжениями на обмотках статора, суммарные сигналы используют как задание мгновенных и симме- тричных фазных напряжений на обмотках статора асинхронного двигателя.
Текст
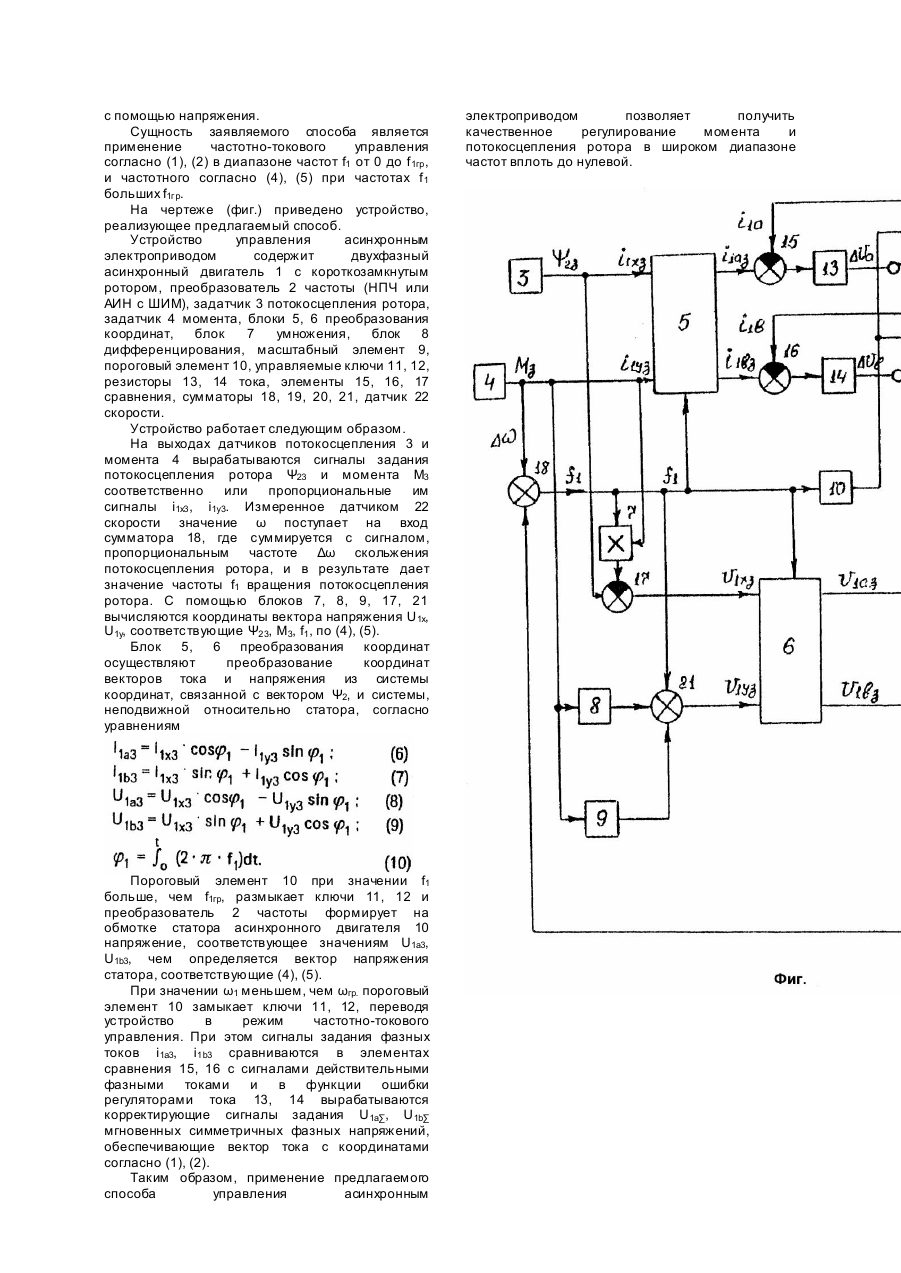
Изобретение относится к электротехнике, в частности к регулируемому электроприводу, построенному на основе асинхронного двигателя с короткозамкнутым ротором, и может быть использовано для машин и механизмов с глубоким диапазоном регулирования скорости. Известен способ управления электроприводом переменного тока, включающий сравнение заданного и действительного значений тока в двигателе, формирование сигнала, соответствующего и х разности, сложение этого сигнала с сигналами, пропорциональными ЭДС двигателя, заданному значению тока и его производной, и подачу результирующего си гнала в цепь управления преобразователя частоты. Однако недостаток данного способа является невозможность качественного регулирования тока, а следовательно момента и скорости асинхронного двигателя на высоких часто тах, вследствие ограниченной полосы пропускания замкнутых контуров регулирования фазных токов двигателя. Наиболее близким к предлагаемому изобретению является (А.с. СССР №1458962, кл. H02P7/42, 1989) способ управления асинхронным электроприводом, который заключается в том, что формируют мгновенные симметричные фазные напряжения на обмотках статора асинхронного двигателя с амплитудой, частотой и фазой, определяемыми по измеренной скорости ω и двум входным воздействиям, одно из которых постоянно и соответствует требуемой амплитуде потокосцепления ротора Ψ23, а др угое соответствует требуемому моменту M3 [2]. Недостатком известного способа является неудовлетворительная точность регулирования момента и потокосцепления ротора на низких частотах напряжения, обусловленная влиянием нестабильности параметров схемы замещения асинхронного двигателя, не учитываемых при данном способе управления. В основу настоящего изобретения положена задача повысить точность регулирования момента и потокосцепления ротора асинхронного двигателя в широком диапазоне частот. Поставленная задача достигается тем, что при задании мгновенных симметричных фазных напряжений U13(t) на обмотках статора асинхронного двигателя с амплитудой, частотой и фазой, определяемыми по измеренной скорости и по двум входным воздействиям, одно из которых постоянно и соответствует требуемой амплитуде потокосцепления ротора Ψ23, а др угое соответствует требуемому моменту M3 , устанавливается значение граничной частоты f1гр., соответствующее полосе пропускания частот при регулировании тока по отклонению, сравнивается заданное значение частоты с граничным, а при частотах f меньших f1г р. задаются мгновенные симметричные фазные токи I13(t) в обмотках статора асинхронного двигателя с амплитудой, частотой и фазой, определяемыми по значениям ω, Ψ23 , M3, измеряются токи фаз двигателя I1(t), сравниваются с заданными токами I13(t), формируется сигнал ΔU3, соответствующий и х разности, суммируется с сигналом U13(t) и суммарный сигнал U1∑, используется как задание мгновенных и симметричных фазных напряжений на обмотках статора асинхронного двигателя. Указанные отличительные признаки существенны, т.к. совокупность предлагаемых дополнительных мер обеспечивает повышение точности регулирования момента и потокосцепления ротора асинхронного двигателя и в изученной заявителем литературе не встречается. Для безынерционного управления моментом M и поддержания постоянства модуля потокосцепления ротора Ψ2 необходимо формирование вектора тока статора, координаты которого I1x, I 1y в декартовой системе, ось x которой связана с вектором Ψ2, а ось y опережает ее на 90°, определяется из уравнений асинхронного двигателя как где L2 - индуктивность ротора; L12 - взаимная индуктивность; pn - число пар полюсов. Вектор Ψ2 вра щается относительно ротора с частотой Δω скольжения где R2 - активное сопротивление ротора, приведенное к статору. Из (1), (2) видно, что координаты вектора тока i1x, i1y однозначно определяют величины Ψ2 и M соответственно и, следовательно, рационально управлять моментом M и потокосцеплением Ψ2 п утем задания и отработки в замкнутой системе регулирования фазных токов статора асинхронного двигателя, обеспечивающих вектор тока статора с координатами (1), (2). Однако такой способ управления возможен в диапазоне частоты f1 от нуля до некоторой граничной f1гр., определяемой дискретными свойствами преобразователя частоты, такими как пульсность для непосредственного преобразователя (НПЧ), несущая частота для автономного инвертора напряжения с широтно-импульсной модуляцией (АИН с ШИ М), и определяющей, в свою очередь, полосу пропускания замкнутых контуров регулирования фазных токов. Для получения вектора тока с координатами (1), (2) необходимо формирование вектора напряжения с координатами где R1 - активное сопротивление статора; L1 - индуктивное сопротивление статора. Такой вектор может быть сформирован и в разомкнутой системе с помощью НПЧ или АИН с ШИМ, чем расширяется диапазон рабочих частот f1. Однако качественное формирование i1x, i1y, а следовательно, M и Ψ2, возможно таким способом управления при достаточно высоких частотах f1 , когда доминирующее значение в (4), (5) играют члены f1. При низких частота х существеннее проявляется влияние параметров схемы замещения асинхронного двигателя, изменяющихся при изменениях температуры и други х факторов, снижающее точность формирования необходимого вектора тока статора с помощью напряжения. Сущность заявляемого способа является применение частотно-токового управления согласно (1), (2) в диапазоне частот f1 от 0 до f 1гр , и частотного согласно (4), (5) при частотах f 1 больших f1г р. На чертеже (фиг.) приведено устройство, реализующее предлагаемый способ. Устройство управления асинхронным электроприводом содержит двухфазный асинхронный двигатель 1 с короткозамкнутым ротором, преобразователь 2 частоты (НПЧ или АИН с ШИМ), задатчик 3 потокосцепления ротора, задатчик 4 момента, блоки 5, 6 преобразования координат, блок 7 умножения, блок 8 дифференцирования, масштабный элемент 9, пороговый элемент 10, управляемые ключи 11, 12, резисторы 13, 14 тока, элементы 15, 16, 17 сравнения, сумматоры 18, 19, 20, 21, датчик 22 скорости. Устройство работает следующим образом. На выходах датчиков потокосцепления 3 и момента 4 вырабатываются сигналы задания потокосцепления ротора Ψ23 и момента M3 соответственно или пропорциональные им сигналы i1x3 , i1y3. Измеренное датчиком 22 скорости значение ω поступает на вход сумматора 18, где суммируется с сигналом, пропорциональным частоте Δω скольжения потокосцепления ротора, и в результате дает значение частоты f1 вращения потокосцепления ротора. С помощью блоков 7, 8, 9, 17, 21 вычисляются координаты вектора напряжения U1x, U1y, соответствующие Ψ23, M3, f1 , по (4), (5). Блок 5, 6 преобразования координат осуществляют преобразование координат векторов тока и напряжения из системы координат, связанной с вектором Ψ2, и системы, неподвижной относительно статора, согласно уравнениям Пороговый элемент 10 при значении f1 больше, чем f1гр, размыкает ключи 11, 12 и преобразователь 2 частоты формирует на обмотке статора асинхронного двигателя 10 напряжение, соответствующее значениям U1a3, U1b3, чем определяется вектор напряжения статора, соответствующие (4), (5). При значении ω1 меньшем, чем ωгр. пороговый элемент 10 замыкает ключи 11, 12, переводя устройство в режим частотно-токового управления. При этом сигналы задания фазных токов i1a3, i1b3 сравниваются в элементах сравнения 15, 16 с сигналами действительными фазными токами и в функции ошибки регуляторами тока 13, 14 вырабатываются корректирующие сигналы задания U1a∑, U1b∑ мгновенных симметричных фазных напряжений, обеспечивающие вектор тока с координатами согласно (1), (2). Таким образом, применение предлагаемого способа управления асинхронным электроприводом позволяет получить качественное регулирование момента и потокосцепления ротора в широком диапазоне частот вплоть до нулевой.
ДивитисяДодаткова інформація
Автори англійськоюArkad'iev Viktor Yuriiovych
Автори російськоюАркадьев Виктор Юрьевич
МПК / Мітки
МПК: H02P 27/04
Мітки: управління, електроприводом, асинхронним, спосіб
Код посилання
<a href="https://ua.patents.su/2-20489-sposib-upravlinnya-asinkhronnim-elektroprivodom.html" target="_blank" rel="follow" title="База патентів України">Спосіб управління асинхронним електроприводом</a>
Спосіб частотного керування асинхронним двигуном
Номер патенту: 2944
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 27/04
Мітки: частотного, асинхронним, керування, двигуном, спосіб
Формула / Реферат:
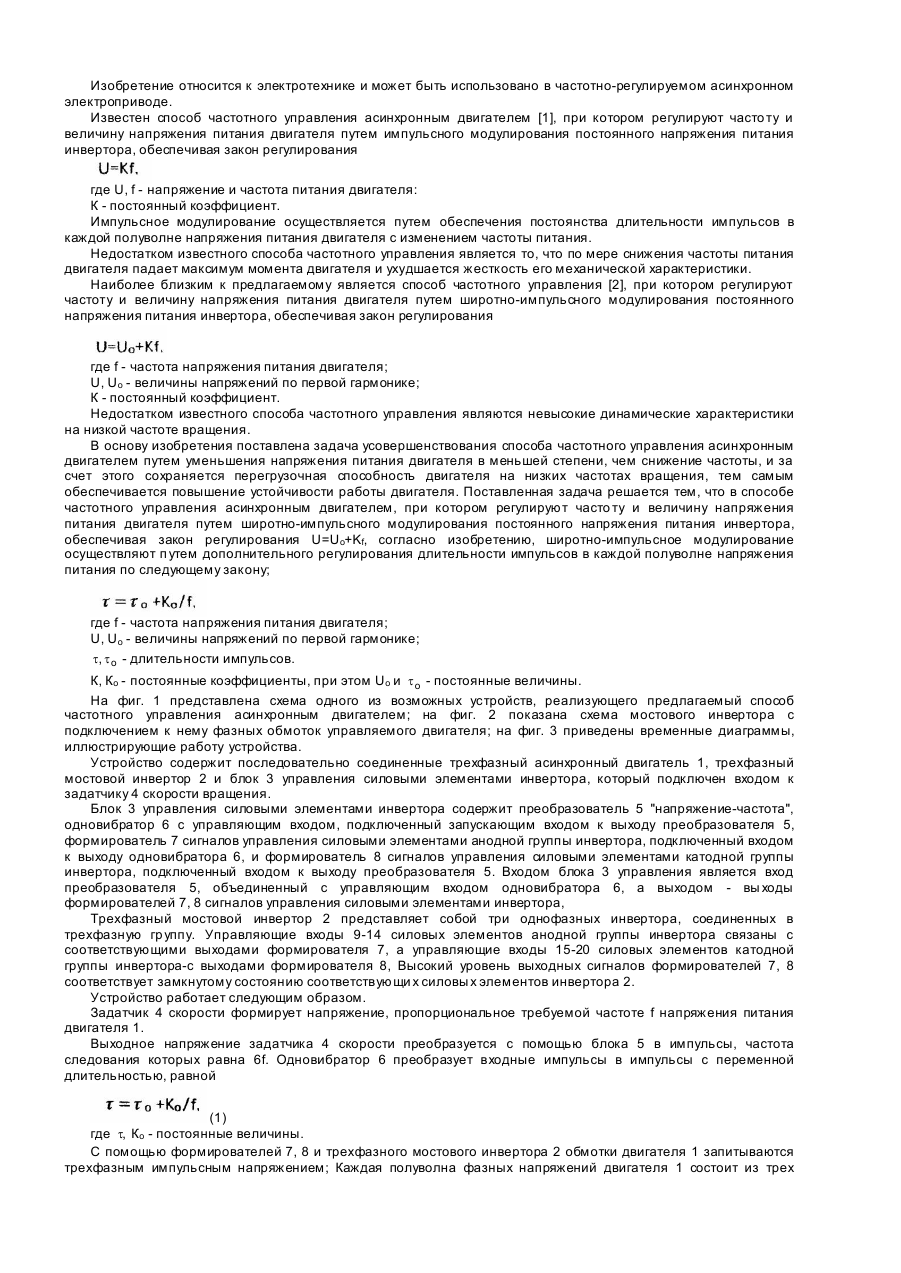
Способ частотного управления асинхронным двигателем, при котором регулируют частоту и величину напряжения питания асинхронного двигателя путем широтно-импульсного модулирования постоянного напряжения питания инвертора, обеспечивая закон регулирования U=Uo+Kf, отличающийся тем, что широтно-импульсное модулирование осуществляют путем дополнительного регулирования длительности импульсов в каждой полуволне напряжения питания по следующему...
Устрій до управління частотно-регульованим електроприводом
Номер патенту: 8587
Опубліковано: 30.09.1996
Автори: Епштейн Ісаак Ізраільович, Бару Олександр Юріьович, Калашников Борис Євгеньович, Гінзбург Михайло Олександрович
МПК: H02P 27/04
Мітки: управління, устрій, частотно-регульованим, електроприводом
Формула / Реферат:
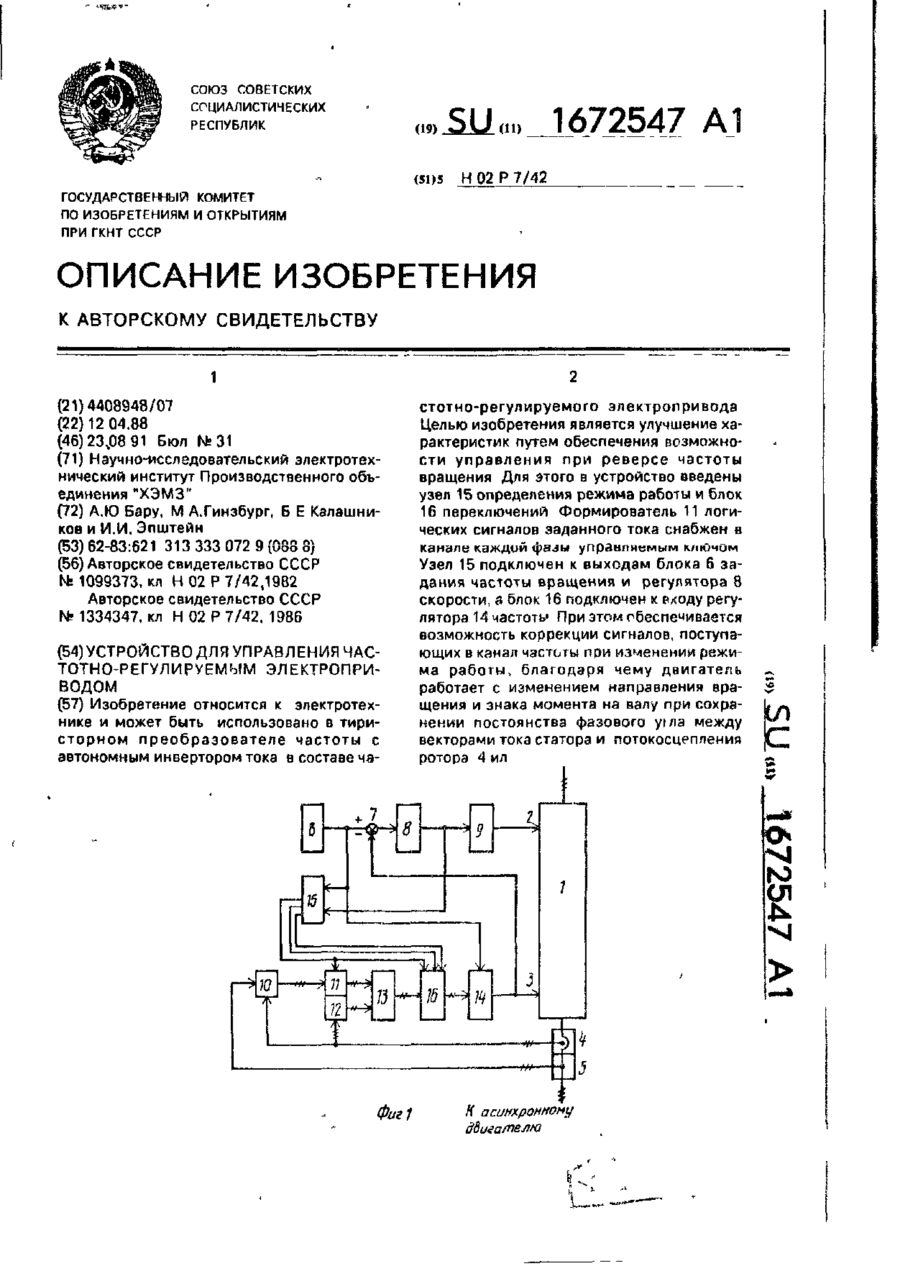
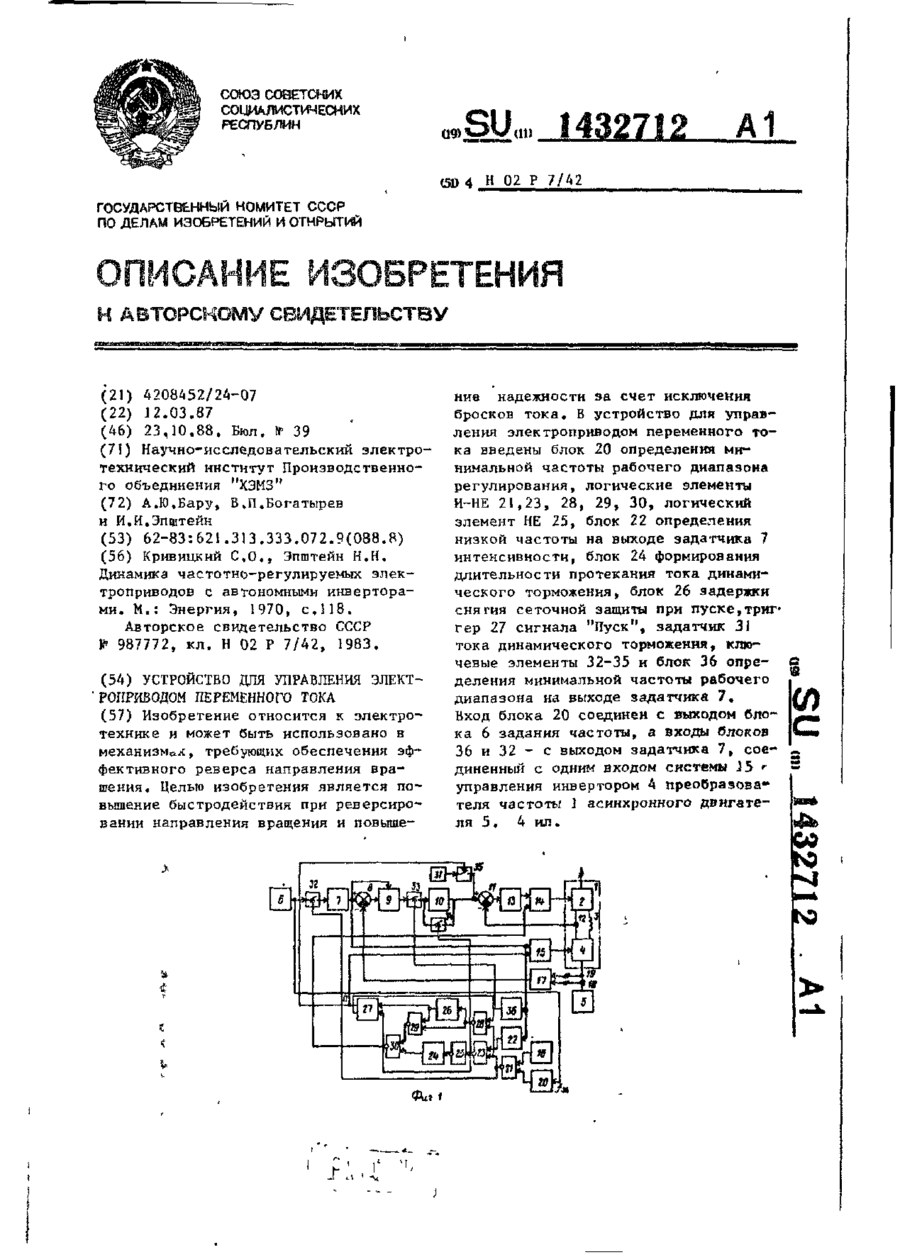
Устройство для управления частотно-регулируемым электроприводом, содержащее преобразователь частоты на основе автономного инвертора тока с двумя управляющими входами тока и частоты, к выходу которого подключены датчики фазных токов и напряжений,, последовательно соединенные блок задания частоты вращения, элемент сравнения, регулятор скорости и блок управления током, выход которого соединен с управляющим входом тока преобразователя...
Устрій до управління багатодвигуним електроприводом зміного струму
Номер патенту: 8584
Опубліковано: 30.09.1996
Автори: Бару Олександр Юріьович, Епштейн Ісаак Ізраільович, Богатирев Вадим Павлович
МПК: H02P 5/74
Мітки: зміного, управління, багатодвигуним, устрій, струму, електроприводом
Формула / Реферат:
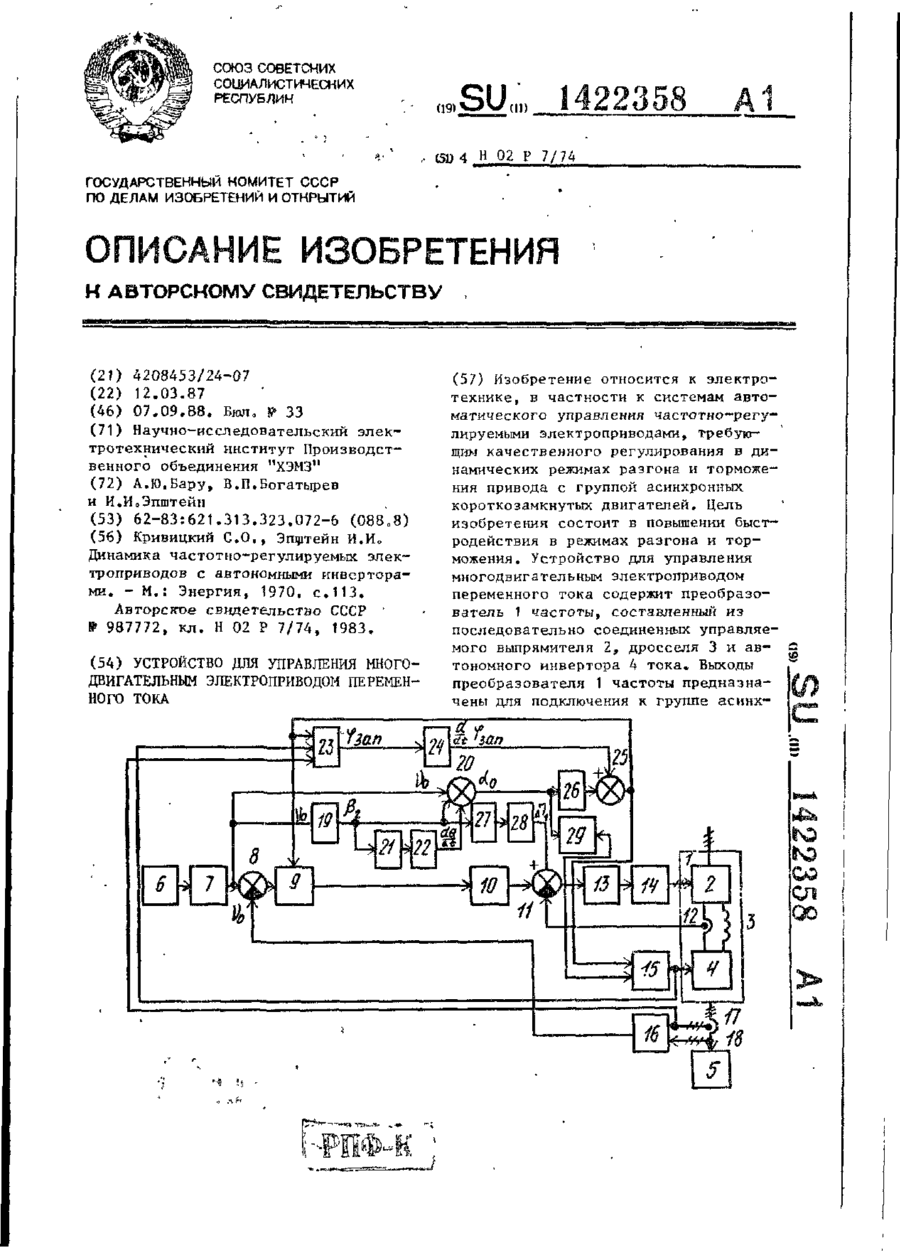
Устройство для управления многодвигательным электроприводом переменного тока, содержащее преобразователь частоты, составленный из последовательно соединенных управляемого выпрямителя, дросселя и автономного инвертора тока, причем выходы преобразователя частоты предназначены для подключения к группе асинхронных короткозамкнутых двигателей, блок задания частоты, выходом подключенный к входу задатчика интенсивности, выход которого...
Спосіб регулювання частоти обертання асинхронного двигуна
Номер патенту: 20402
Опубліковано: 15.07.1997
Автор: Аркадьєв Віктор Юрійович
МПК: H02P 27/04
Мітки: двигуна, обертання, регулювання, асинхронного, частоти, спосіб
Формула / Реферат:
Способ регулирования частоты вращения асинхронного электродвигателя, при котором подают на каждую фазную обмотку статора напряжение питающей сети неизменной частоты и изменяют частоту вращения электромагнитного поля статора вниз от частоты напряжения питающей сети при помощи подключения фаз в последовательностиU1-А, С, В, А, С, В,...;U2-В, А, С, В, А, С,...;U3-С, В, А, С, В, А,..., а вверх - в...
Устрій до управління електроприводом зміного струму
Номер патенту: 8585
Опубліковано: 30.09.1996
Автори: Бару Олександр Юріьович, Епштейн Ісаак Ізраільович, Богатирев Вадим Павлович
МПК: H02P 27/04
Мітки: зміного, струму, електроприводом, управління, устрій
Формула / Реферат:
Устройство для управления электроприводом переменного тока, содержащее преобразователь частоты, составленный из последовательно соединенных управляемого выпрямителя, дросселя и автономного инвертора тока с выходом для подключения к группе асинхронных короткозамкнутых двигателей, блок задания частоты, задатчик интенсивности, выход которого подключен к первому входу первого блока суммирования, блок деления, вход делимого которого подключен...
Попередній патент: Генератор трифазних синусоїдальних сигналів
Наступний патент: Барабанний волочильний стан
Випадковий патент: Спосіб недетермінованого криптографічного перетворення блоків даних