Пристрій для автоматизованого визначення параметрів передаточних функцій нелінійних динамічних об’єктів
Номер патенту: 22371
Опубліковано: 25.04.2007
Автори: Пєвнєв Володимир Яковлевич, Логвиненко Микола Федорович, Очерідник Світлана Володимирівна, Чурюмов Геннадій Іванович, Серков Олександр Анатолійович
Формула / Реферат
Пристрій для автоматизованого визначення параметрів передаточних функцій нелінійних динамічних об'єктів, що містить фільтр Лагерра з n колами, n помножуючих пристроїв, блок усереднення, підсумовувач з n входами, блок керування, який відрізняється тим, що додатково введені додаткове коло фільтра Лагерра, додаткові блоки усереднення та регулювання параметрів.
Текст
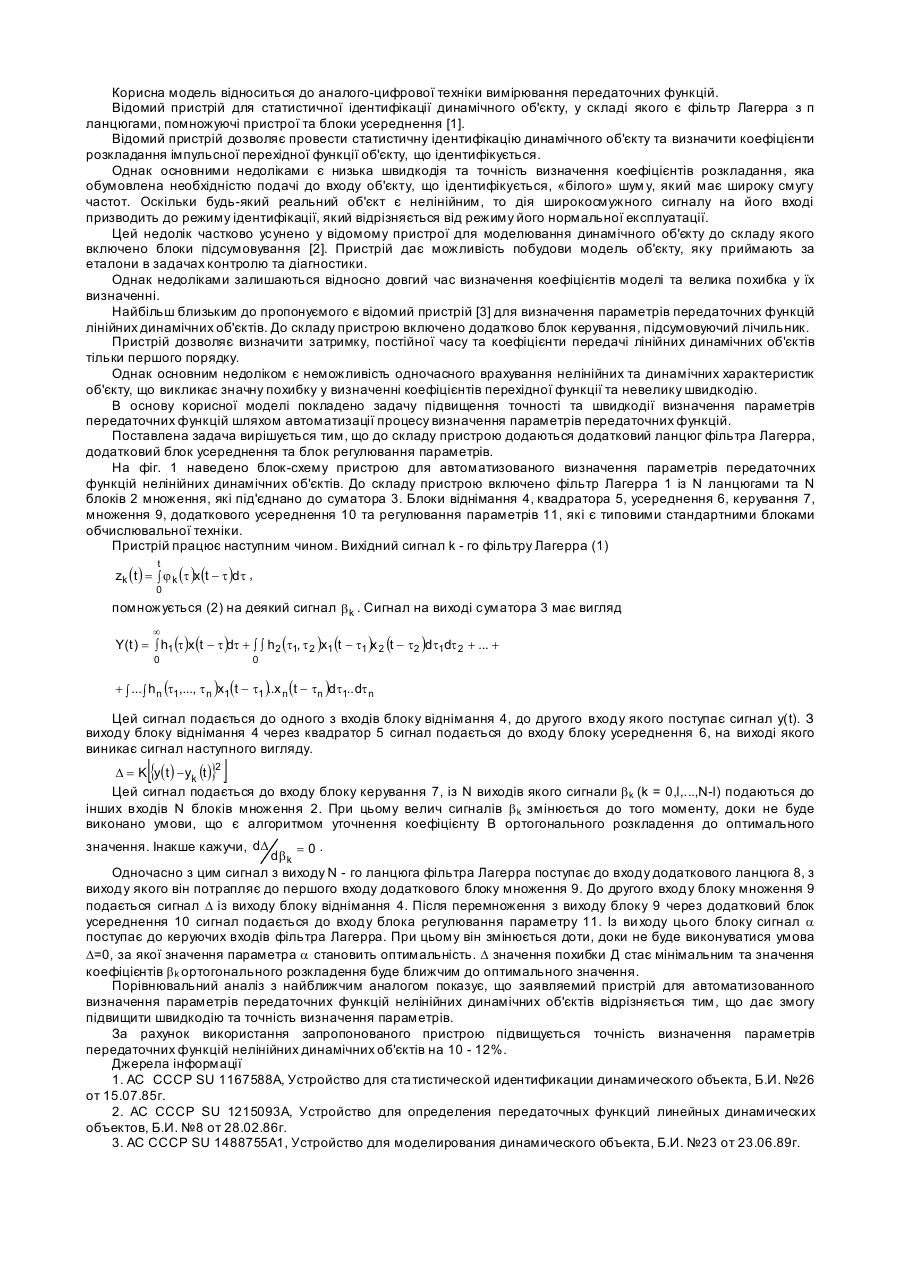
Корисна модель відноситься до аналого-цифрової техніки вимірювання передаточних функцій. Відомий пристрій для статистичної ідентифікації динамічного об'єкту, у складі якого є фільтр Лагерра з п ланцюгами, помножуючі пристрої та блоки усереднення [1]. Відомий пристрій дозволяє провести статистичну ідентифікацію динамічного об'єкту та визначити коефіцієнти розкладання імпульсної перехідної функції об'єкту, що ідентифікується. Однак основними недоліками є низька швидкодія та точність визначення коефіцієнтів розкладання, яка обумовлена необхідністю подачі до входу об'єкту, що ідентифікується, «білого» шум у, який має широку смугу частот. Оскільки будь-який реальний об'єкт є нелінійним, то дія широкосмужного сигналу на його вході призводить до режиму ідентифікації, який відрізняється від режиму його нормальної експлуатації. Цей недолік частково усунено у відомому пристрої для моделювання динамічного об'єкту до складу якого включено блоки підсумовування [2]. Пристрій дає можливість побудови модель об'єкту, яку приймають за еталони в задачах контролю та діагностики. Однак недоліками залишаються відносно довгий час визначення коефіцієнтів моделі та велика похибка у їх визначенні. Найбільш близьким до пропонуємого є відомий пристрій [3] для визначення параметрів передаточних функцій лінійних динамічних об'єктів. До складу пристрою включено додатково блок керування, підсумовуючий лічильник. Пристрій дозволяє визначити затримку, постійної часу та коефіцієнти передачі лінійних динамічних об'єктів тільки першого порядку. Однак основним недоліком є неможливість одночасного врахування нелінійних та динамічних характеристик об'єкту, що викликає значну похибку у визначенні коефіцієнтів перехідної функції та невелику швидкодію. В основу корисної моделі покладено задачу підвищення точності та швидкодії визначення параметрів передаточних функцій шляхом автоматизації процесу визначення параметрів передаточних функцій. Поставлена задача вирішується тим, що до складу пристрою додаються додатковий ланцюг фільтра Лагерра, додатковий блок усереднення та блок регулювання параметрів. На фіг. 1 наведено блок-схему пристрою для автоматизованого визначення параметрів передаточних функцій нелінійних динамічних об'єктів. До складу пристрою включено фільтр Лагерра 1 із N ланцюгами та N блоків 2 множення, які під'єднано до суматора 3. Блоки віднімання 4, квадратора 5, усереднення 6, керування 7, множення 9, додаткового усереднення 10 та регулювання параметрів 11, які є типовими стандартними блоками обчислювальної техніки. Пристрій працює наступним чином. Вихідний сигнал k - го фільтру Лагерра (1) t zk (t ) = ò j k (t )x (t - t )d t , 0 помножується (2) на деякий сигнал b k . Сигнал на виході суматора 3 має вигляд ¥ Y(t ) = ò h1 (t)x (t - t )dt + ò ò h2 (t1, t 2 )x1 (t - t1 )x 2 (t - t2 )dt1dt 2 + ... + 0 0 + ò ... ò hn (t1,..., t n )x1(t - t1 )..x n (t - tn )dt1.. dt n Цей сигнал подається до одного з входів блоку віднімання 4, до другого входу якого поступає сигнал y(t). З виходу блоку віднімання 4 через квадратор 5 сигнал подається до входу блоку усереднення 6, на виході якого виникає сигнал наступного вигляду. [ ] D = K {y(t ) -yk (t )}2 Цей сигнал подається до входу блоку керування 7, із N виходів якого сигнали b k (k = 0,l,...,N-l) подаються до інших входів N блоків множення 2. При цьому велич сигналів b k змінюється до того моменту, доки не буде виконано умови, що є алгоритмом уточнення коефіцієнту В ортогонального розкладення до оптимального значення. Інакше кажучи, d D =0. dbk Одночасно з цим сигнал з виходу N - го ланцюга фільтра Лагерра поступає до входу додаткового ланцюга 8, з виходу якого він потрапляє до першого входу додаткового блоку множення 9. До другого входу блоку множення 9 подається сигнал D із виходу блоку віднімання 4. Після перемноження з виходу блоку 9 через додатковий блок усереднення 10 сигнал подається до входу блока регулювання параметру 11. Із ви ходу цього блоку сигнал a поступає до керуючих входів фільтра Лагерра. При цьому він змінюється доти, доки не буде виконуватися умова D=0, за якої значення параметра a становить оптимальність. D значення похибки Д стає мінімальним та значення коефіцієнтів b k ортогонального розкладення буде ближчим до оптимального значення. Порівнювальний аналіз з найближчим аналогом показує, що заявляемий пристрій для автоматизованного визначення параметрів передаточних функцій нелінійних динамічних об'єктів відрізняється тим, що дає змогу підвищити швидкодію та точність визначення параметрів. За рахунок використання запропонованого пристрою підвищується точність визначення параметрів передаточних функцій нелінійних динамічних об'єктів на 10 - 12%. Джерела інформації 1. AC СССР SU 1167588A, Устройство для ста тистической идентификации динамического объекта, Б.И. №26 от 15.07.85г. 2. АС СССР SU 1215093A, Устройство для определения передаточных функций линейных динамических объектов, Б.И. №8 от 28.02.86г. 3. АС СССР SU 1488755A1, Устройство для моделирования динамического объекта, Б.И. №23 от 23.06.89г.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for automatically determining the parameters of the transfer function of a nonlinear dynamic object
Автори англійськоюLohvynenko Mykola Fedorovych, Pievniev Volodymyr Yakovych, Serkov Oleksandr Anatoliiovych, Churiumov Hennadii Yakovych, Churiumov Hennadii Ivanovych
Назва патенту російськоюУстройство для автоматического определения параметров передаточной функции нелинейного динамического объекта
Автори російськоюЛогвиненко Николай Федорович, Певнев Владимир Яковлевич, Серков Александр Анатольевич, Чурюмов Геннадий Иванович
МПК / Мітки
МПК: G05B 23/02
Мітки: визначення, функцій, динамічних, об'єктів, автоматизованого, передаточних, параметрів, пристрій, нелінійних
Код посилання
<a href="https://ua.patents.su/2-22371-pristrijj-dlya-avtomatizovanogo-viznachennya-parametriv-peredatochnikh-funkcijj-nelinijjnikh-dinamichnikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для автоматизованого визначення параметрів передаточних функцій нелінійних динамічних об’єктів</a>
Пристрій для роздільного вимірювання параметрів нелінійних електричних двополюсників
Номер патенту: 49980
Опубліковано: 15.10.2002
Автори: Бурбело Михайло Йосипович, Кравчук Павло Леонідович, Левицький Сергій Михайлович
МПК: G01R 27/02, H03K 5/00
Мітки: електричних, двополюсників, пристрій, нелінійних, параметрів, роздільного, вимірювання
Формула / Реферат:
Пристрій для роздільного вимірювання параметрів нелінійних електричних двополюсників, що містить генератор синусоїдної напруги, перший вимірювальний перетворювач, який складається з операційного підсилювача із зразковим резистором в колі від'ємного зворотного зв'язку і вимірюваним двополюсником у вхідному колі, два вузли вибірки-зберігання, два аналого-цифрових перетворювачі одновібратор і два блоки індикації, причому вихід генератора...
Пристрій для автоматизованого цифрового знімання параметрів автомобільної дороги
Номер патенту: 8852
Опубліковано: 15.08.2005
Автори: Каракай Сергій Васильович, Шульц Роман Володимирович, Бурачек Всеволод Германович, Малік Тетяна Миколаївна, Васильєв Олександр Павлович, Присяжнюк Анатолій Йосифовіч
МПК: G03B 41/00
Мітки: автоматизованого, параметрів, дороги, автомобільної, цифрового, знімання, пристрій
Формула / Реферат:
Пристрій для автоматизованого цифрового знімання параметрів автомобільної дороги, що містить блок цифрових камер, блок обробки інформації, інерціально-навігаційний блок, GPS-приймач, ложемент та блок живлення, що розміщені на рухомому об'єкті, який відрізняється тим, що в ньому блок цифрових камер має дві групи камер - групу камер точного фотограмметричного каналу, групу камер оглядового фотограмметричного каналу, при цьому оптичні осі камер...
Пристрій для автоматизованого знімання цифрованих параметрів автодороги
Номер патенту: 76910
Опубліковано: 15.09.2006
Автори: Присяжнюк Анатолій Йосифовіч, Малік Тетяна Миколаївна, Васильєв Олександр Павлович, Каракай Сергій Васильович, Шульц Роман Володимирович, Бурачек Всеволод Германович
МПК: G01C 11/00
Мітки: цифрованих, параметрів, автодороги, пристрій, автоматизованого, знімання
Формула / Реферат:
Пристрій для автоматизованого знімання цифрованих параметрів автодороги, що має блок цифрових камер, блок обробки інформації, інерційно-навігаційний блок, GPS-приймач, ложемент та блок живлення, що розміщені на рухомому об'єкті, який відрізняється тим, що блок цифрових камер має дві групи камер, а саме групу камер точного фотограмметричного каналу і групу камер оглядового фотограмметричного каналу, при цьому оптичні осі камер кожної групи...
Пристрій для визначення динамічних сил
Номер патенту: 8285
Опубліковано: 15.07.2005
Автори: Цівковський Олександр Григорович, Кисельов Олександр Григорович
Мітки: пристрій, визначення, динамічних, сіль
Формула / Реферат:
1. Пристрій для вимірювання динамічних сил, що містить встановлені на нерухомій основі кілька датчиків із проміжними тілами між ними, який відрізняється тим, що проміжні тіла виконані у вигляді касет з пазами, оснащеними розміщеними в цих пазах тарованими елементами, на яких установлені датчики з різним діапазоном вимірюваних зусиль, при цьому касети розміщені одна над однією таким чином, що кожен датчик у ярусі зв'язаний з нижньою поверхнею...
Пристрій для виміру параметрів сипучих матеріалів у потоці
Номер патенту: 67522
Опубліковано: 15.06.2004
Автор: Лехціер Олег Леонідович
МПК: G01N 9/00
Мітки: параметрів, пристрій, виміру, матеріалів, потоці, сипучих
Формула / Реферат:
Пристрій для виміру параметрів сипучих матеріалів у потоці, що містить вимірювальний перетворювач, задатчик періоду виміру, перетворювач параметрів переміщення і блок керування, причому вихід вимірювального перетворювача підключений до першого входу блока керування, вихід задатчика періоду виміру підключений до другого входу блока керування, а перший вихід перетворювача параметрів переміщення підключений до третього входу блока керування,...
Попередній патент: Спосіб захисту комп’ютерів від дії програм-вірусів
Наступний патент: Платформа турбоблока газоперекачувального агрегата
Випадковий патент: Підшипниковий вузол