Пристрій для автоматизованого цифрового знімання параметрів автомобільної дороги
Номер патенту: 8852
Опубліковано: 15.08.2005
Автори: Каракай Сергій Васильович, Шульц Роман Володимирович, Васильєв Олександр Павлович, Присяжнюк Анатолій Йосифовіч, Малік Тетяна Миколаївна, Бурачек Всеволод Германович


Формула / Реферат
Пристрій для автоматизованого цифрового знімання параметрів автомобільної дороги, що містить блок цифрових камер, блок обробки інформації, інерціально-навігаційний блок, GPS-приймач, ложемент та блок живлення, що розміщені на рухомому об'єкті, який відрізняється тим, що в ньому блок цифрових камер має дві групи камер - групу камер точного фотограмметричного каналу, групу камер оглядового фотограмметричного каналу, при цьому оптичні осі камер кожної групи зорієнтовані під різними кутами відносно горизонту, камери разом з інерціально-навігаційним блоком та GPS-приймачем жорстко закріплені на ложементі і осі інерціально-навігаційного блоку взаємно орієнтовані з осями цифрових камер, а в пристрій введено блок калібрування орієнтації положення оптичних осей цифрових камер.
Текст
Пристрій для автоматизованого цифрового знімання параметрів автомобільної дороги, що містить блок цифрових камер, блок обробки інфо рмації, інерціально-навігаційний блок, GPSприймач, ложемент та блок живлення, що розміщені на рухомому об'єкті, який відрізняється тим, що в ньому блок цифрових камер має дві групи камер - групу камер точного фотограмметричного каналу, групу камер оглядового фотограмметричного каналу, при цьому оптичні осі камер кожної групи зорієнтовані під різними кутами відносно горизонту, камери разом з інерціальнонавігаційним блоком та GPS-приймачем жорстко закріплені на ложементі і осі інерціальнонавігаційного блоку взаємно орієнтовані з осями цифрових камер, а в пристрій введено блок калібрування орієнтації положення оптичних осей цифрових камер. Пристрій відноситься до області геодезичного приладобудування, зокрема до мобільних картографічних систем. Відомо фотограмметричну мобільну систему для автоматизованої зйомки дорожньої ситуації при дорожньо транспортних пригодах [1]. Відомо "Мобільну картографуючу систему" "GPSVision" фірми Lambda Tech (США), яка складається з блоку цифрових камер, GPS-приймача, інерціального навігаційного комплексу і одометра [2]. Найбільш близьким аналогом по технічній суті та результату, що досягається, та взятим за прототип є мобільна картографуюча система On-Sight фірми "Transmap" (США) [3]. Вона містить базис, на якому жорстко закріплений блок цифрових камер, а також містить GPS приймач та інерціальний навігаційний комплекс і одометр. До недоліків вище означених пристроїв, що заважають отримати очікуваний технічний результат, виражений у можливості виконання точного фотограмметричного знімання дороги можна віднести: - роздільне розміщення GPS-приймача, інерціального навігаційного комплексу та блоку цифро вих камер, що не дозволяє визначити відхилення всього блоку одразу; - блок цифрових камер містить лише камери одного типу і одних параметрів, що не дозволяє одночасно виконувати точні вимірювання і робити збір великої кількості інформації; - відсутня можливість автоматичного управління зніманням безпосередньо під час знімання; - відсутність в фотограмметричному каналі механізмів контролю положення знімальної осі цифрової камери. Задачею корисної моделі є створення пристрою, який дозволяє забезпечити автоматизацію та підвищення точності виконання фотограмметричного цифрового знімання параметрів автодороги. Поставлена задача вирішується за рахунок створення нового пристрою для автоматизованого цифрового знімання параметрів автодороги, що містить: блок цифрових камер, блок обробки інформації, інерціально-навігаційний блок, GPSприймач, ложемент та блок живлення, що розміщені на рухомому об'єкті, відрізняється тим, що в ньому блок цифрових камер має дві групи камер: групу камер точного фотограмметричного каналу, групу камер оглядового фотограмметричного ка Ю 00 00 5Г 8852 налу, при цьому оптичні осі камер кожної групи зорієнтовані під різними кутами відносно горизонту; камери разом з інерціально-навігаційним блоком та GPS-приймачем жорстко закріплені на ложементі і осі інерціально-навігаційного блоку взаємно орієнтовані з осями цифрових камер, а в пристрій введено блок калібрування орієнтації положення оптичних осей цифрових камер. Технічним результатом запропонованої корисної моделі є повна автоматизація процесу цифрової фотограмметричної зйомки автодороги, у тому числі параметрів дорожнього полотна та підвищення точності фотограмметричної зйомки. Аналіз існуючих технічних рішень показав відсутність технічних рішень для даних цілей, які дозволяють підвищити точність виконання автоматизованого цифрового знімання параметрів автодороги. Даний пристрій ніколи не описувався в проаналізованих джерелах, отже є новим. На Фіг. 1-2 зображено схему запропонованого пристрою: 1 - ложемент; 2 - цифрові камери точного фотограмметричного каналу (група всього до 8 камер); 3 - блок управління зйомкою; 4 - інерціальний навігаційний блок; 5 - GPS-приймач; 6 - цифрові камери оглядового фотограмметричного каналу (група всього до 4 камер); 7 - прилади 2, 4, 5, 6 жорстко встановлені на ложементі 1 та об'єднані у єдиний знімальний комплекс 7. На Фіг. 1-2 зображений загальний вигляд пристрою, Фіг.1 - збоку, Фіг.2 - зверху, на Фіг.З показане розташування калібрувальних індексів в точному фотограмметричному каналі. На даху транспортного засобу розташований ложемент (1), що несе на собі знімальний комплекс (7), до складу якого входить блок цифрових камер (2, 6), GPS-приймач (5), інерціальний навігаційний блок (4). В середині транспортного засобу розташований блок управління зніманням (3), а також блок обробки інформації та блок збереження інформації. На Фіг. 1, б показані знімальні зони точного фотограмметричного каналу: А - передня, В - ліва, С - права. На Фіг.2 зображено розташування блока калібрувальних індексів (10), що представляє собою пластину (9) з нанесеною на неї калібрувальними індексами і механізм підйому і опускання (8) пластини під час періодичного контролю положення знімальних осів (11) камер (2). На Фіг.4 зображено блок-схему запропонованого пристрою. Блоки 2, 3, 4, 5, 6, 10 визначені вище. 12 - блок обробки інформації; 13 - блок збереження інформації. Пристрій діє наступним чином. Під час руху транспортного засобу блок цифрових камер (2, 6) виконує фотографування автомобільної дороги. Координати центрів проекції камер (2, 6) визначаються за допомогою GPS-приймача (5). Елементи зовнішнього орієнтування камер 2, під час тимчасового блокування сигналу від супутників GPS визначаються за допомогою блоку (4). Вся отримана інформація потрапляє в блок обробки інформації (12), частина обробленої інформації, необхідної для управління зйомкою, передасться в блок управління (3), в якому формуються сигнали управління та здійснюється управління роботою блоку камер (2, 6), інерціально-навігаційного блоку (4). GPS-приймача (5), блоку калібрувальних індексів (10) і блоку обробки інформації (12). За командою блоку (3) блок (12) передає оброблену інформацію для зберігання в блок (13). В блоці управління (3) оперативно виконується аналіз результатів і якщо потрібно виконується повторне знімання. Розташування всього комплексу 7: камер 2, 6, блоків 4, 5 на одній жорсткій платформі ложементі (1) дозволяє однозначно визначити елементи орієнтування цифрових камер 2. В точному фотограмметричному каналі на ложементі 1 передбачене закріплення блоку калібрувальних індексів (10). Під час виконання знімання калібрувальні індекси 10 за допомогою механізмів (8) піднімаються через певні проміжки часу. Отримані знімки індексів під час обробки дозволяють визначити можливе зміщення знімальної осі (11) камери 2 та ввести поправки. Таким чином, запропонований пристрій автоматизованого цифрового знімання параметрів автодороги, забезпечує повну автоматизацію цифрового фотограмметричного знімання дороги та дозволяє підвищити точність визначення елементів дороги в умовах динамічного знімання. Література: 1. Нікітенко А.І., Балдін О.Ю. Аналітична обробка матеріалів наземної стереофотограмметричної зйомки місць ДТП на автомобільних дорогах. Безпека дорожнього руху України. Київ, науковотехнічний вісник, 2004/1-2 (17) 2. Lambda Tech., Product information, background, service guide. Information Brochure, USA, 1996. 3. Transmap., ON-SIGHT Mobile Mapping System. Homepage http://www.Transmap.corn/technology.htm 8852 ФІГ.1 !•• Фіг.З 10 Фіг.4 Комп'ютерна верстка А. Крижанівський Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул. Глазунова, 1, м. Київ - 4 2 , 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for automatically monitoring motion of a vehicle on a highway by using digital video cameras
Автори англійськоюBurachek Vsevolod Hermanovych, Vasyliev Oleksandr Pavlovych, Karakai Sergii Vasyliovych, Malik Tetiana Mykolaivna, Shults Roman Volodymyrovych
Назва патенту російськоюУстройство для автоматизированного контроля движения транспортного средства по автомобильной дороге с помощью цифровых видеокамер
Автори російськоюБурачек Вселовод Германович, Васильев Александр Павлович, Каракай Сергей Васильевич, Малик Татьяна Николаевна, Шульц Роман Владимирович
МПК / Мітки
МПК: G03B 41/00
Мітки: цифрового, автоматизованого, автомобільної, знімання, параметрів, дороги, пристрій
Код посилання
<a href="https://ua.patents.su/4-8852-pristrijj-dlya-avtomatizovanogo-cifrovogo-znimannya-parametriv-avtomobilno-dorogi.html" target="_blank" rel="follow" title="База патентів України">Пристрій для автоматизованого цифрового знімання параметрів автомобільної дороги</a>
Прилад для контролю рівності автомобільної дороги
Номер патенту: 62110
Опубліковано: 15.12.2003
Автори: Кіяшко Ігор Володимирович, Смолянюк Роман Володимирович, Прусенко Євген Дмитрович, Стороженко Михайло Семенович
МПК: E01C 23/00
Мітки: прилад, контролю, дороги, автомобільної, рівності
Формула / Реферат:
Прилад для контролю рівності автомобільних доріг, який містить механізми вимірювання та обробки інформації, який відрізняється тим, що механізм вимірювання виконано у вигляді пристрою для кріплення корпусу, у якому жорстко закріплена лінійка з рисками та такий, що має можливість вільного переміщення відносно корпусу, шток, на кінці якого розташовано оптичний датчик, електрично зв'язаний з комп'ютером, що виконує обробку інформації.
Збірна конструкція автомобільної дороги із залізобетону
Номер патенту: 6779
Опубліковано: 16.05.2005
Автори: Бідношея Марія Олександрівна, Бідношея Марина Валентинівна, Бідношея Валентин Якович, Погрібний Дмитро Пилипович
МПК: E01C 3/00
Мітки: дороги, збірна, автомобільної, конструкція, залізобетону
Формула / Реферат:
1. Збірна конструкція автомобільної дороги із залізобетону, що містить палі і естакаду із залізобетонних плит великого розміру, яка відрізняється тим, що палі з естакадою з повздовжніх хрестоподібних в перерізі залізобетонних балок і залізобетонних плит розміщені в траншеї, залізобетонні плити обперті на виступи повздовжніх балок і мають з одного боку щільові отвори з решіткою для водовідведення під дорогу у відкриті водозабірні лотки, дорога...
Пристрій для знімання деталей

Номер патенту: 53551
Опубліковано: 15.01.2003
Автори: Горошко Ігор Петрович, Брюханов Олександр Михайлович, Ємельяненко Володимир Іванович, Лапенков Володимир Юрійович, Мнухін Анатолій Григорович, Мнухін Владислав Анатольович
МПК: B25B 27/14
Мітки: деталей, пристрій, знімання
Формула / Реферат:
Пристрій для знімання деталей, переважно підшипників, що містить корпус, на зовнішній поверхні якого закріплено вушка, шарнірно з'єднані з лапами, і привід, який відрізняється тим, що усередині корпусу розташовано поршень зі штоком, що виходить за межі корпусу, із протилежного боку в корпус вбудовані електроди, з'єднані з високовольтним джерелом високої напруги, і штуцер для заповнення корпусу рідким електролітом.
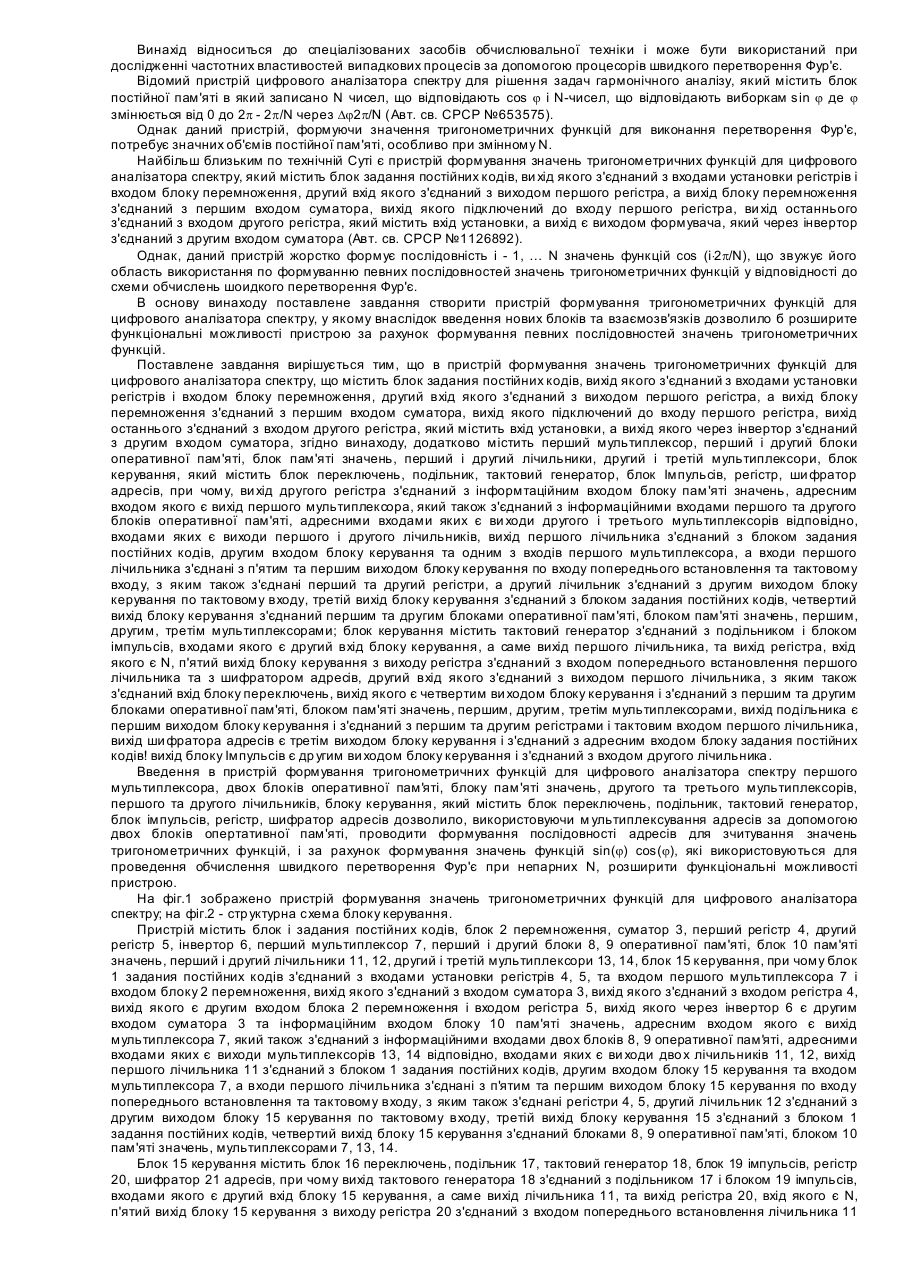
Пристрій формування значень тригонометричних функцій для цифрового аналізатора спектра
Номер патенту: 25782
Опубліковано: 30.10.1998
Автори: Процько Ігор Омельянович, Рашкевич Юрій Михайлович
МПК: G06F 15/00, G01R 23/16
Мітки: цифрового, аналізатора, пристрій, спектра, значень, функцій, тригонометричних, формування
Формула / Реферат:
Пристрій формування значень тригонометричних функцій для цифрового аналізатора спектра, що містить блок завдання постійних кодів, вихід якого з'єднаний з входами установки регістрів і входом блоку перемноження, другий вхід якого з'єднаний з виходом першого регістра, а вихід блоку перемноження з'єднаний з першим входом суматора, вихід якого підключений до входу першого регістра, вихід останнього з'єднаний з входом другого регістра, який...
Пристрій для цифрового захисту телефонних переговорів
Номер патенту: 51582
Опубліковано: 15.11.2002
Автори: Отришко Олег Васильович, Сніжко Олексій Іванович, Барлабанов Валерій Володимирович, Літвінов Віталій Васильович, Вакуленко Михайло Володимирович, Павлюков Валерій Васильович, Морозов Анатолій Олексійович
МПК: H04M 1/68
Мітки: переговорів, цифрового, телефонних, пристрій, захисту
Формула / Реферат:
1. Пристрій для цифрового захисту телефонних переговорів, що містить цифровий процесор обробки сигналів, на управляючі входи та виходи якого під’єднані відповідно управляючі виходи та входи електростираючого перепрограмовного постійного запам’ятовуючого пристрою, а перша група інформаційних входів та виходів цифрового процесора обробки сигналів через першу шину послідовного порта та штирковий рознім, відповідний гніздовому розніму моделі...
Попередній патент: Підлога
Наступний патент: Спосіб підготовки живильної води для екстрагування сахарози із бурякової сировини
Випадковий патент: Спосіб діагностики загострення бронхіту