Спосіб виміру крутного моменту
Формула / Реферат
Спосіб виміру крутного моменту, що полягає у вимірі, за заданим законом моменту щодо створювання зсуву інформаційних імпульсів вимірювачем крутного моменту з використанням деформації пружного елемента, та подальшій обробці імпульсів, який відрізняється тим, що зсув фази інформаційних імпульсів під час обертання вала привідного двигуна і виконавчого механізму реєструють безконтактно імпульсними датчиками за допомогою вимірювальних дисків і пружним сендвичоподібним елементом, якими вони зв'язані між собою, та за різницею між силами обертання двигуна й опору обертанню виконавчого механізму визначають величину збільшення крутного моменту за заданим законом моменту щодо утворення зсуву пропорційно навантаженню, яке зростає.
Текст
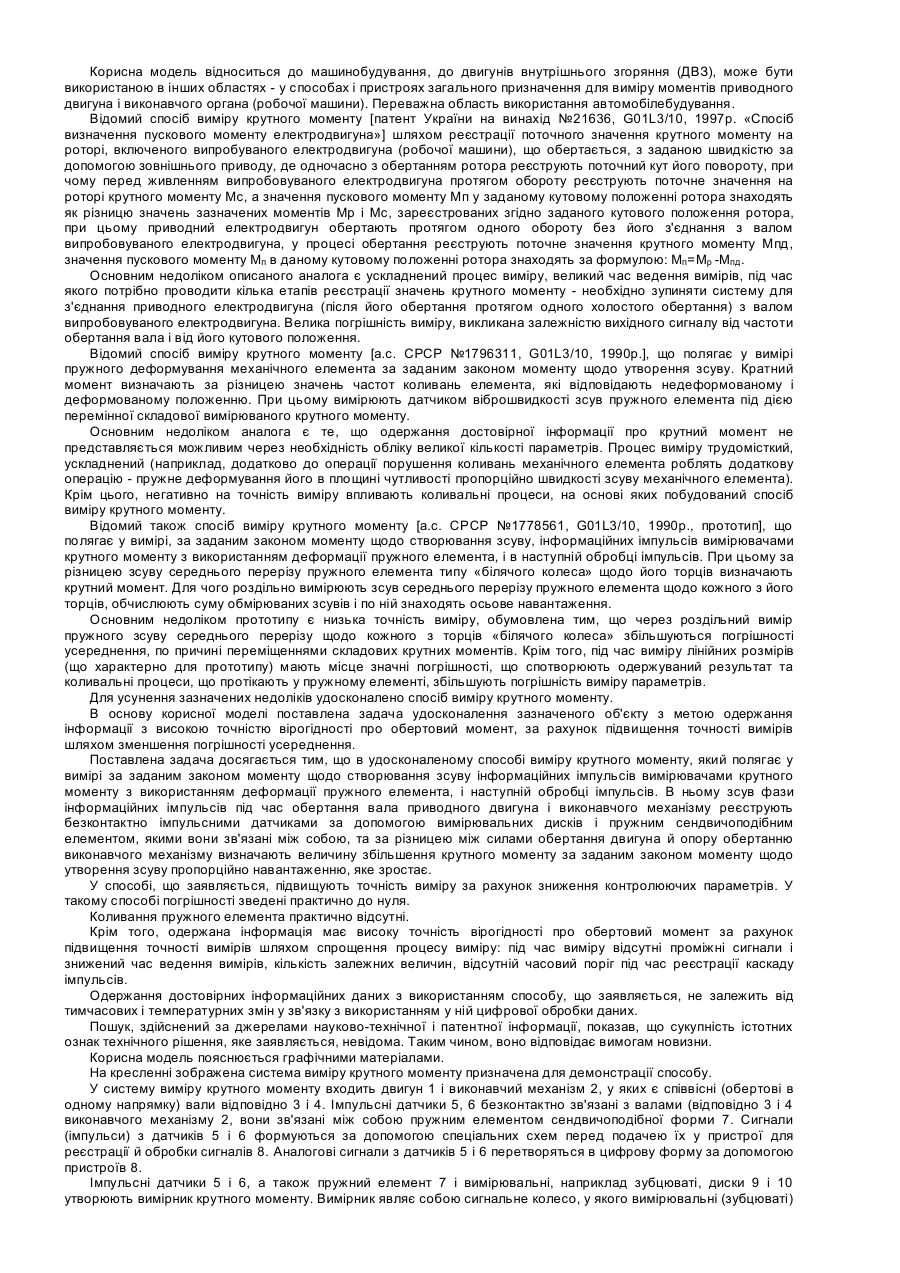
Корисна модель відноситься до машинобудування, до двигунів внутрішнього згоряння (ДВЗ), може бути використаною в інших областях - у способах і пристроях загального призначення для виміру моментів приводного двигуна і виконавчого органа (робочої машини). Переважна область використання автомобілебудування. Відомий спосіб виміру крутного моменту [патент України на винахід №21636, G01L3/10, 1997р. «Спосіб визначення пускового моменту електродвигуна»] шляхом реєстрації поточного значення крутного моменту на роторі, включеного випробуваного електродвигуна (робочої машини), що обертається, з заданою швидкістю за допомогою зовнішнього приводу, де одночасно з обертанням ротора реєструють поточний кут його повороту, при чому перед живленням випробовуваного електродвигуна протягом обороту реєструють поточне значення на роторі крутного моменту Мс, а значення пускового моменту Мп у заданому кутовому положенні ротора знаходять як різницю значень зазначених моментів Мр і Мс, зареєстрованих згідно заданого кутового положення ротора, при цьому приводний електродвигун обертають протягом одного обороту без його з'єднання з валом випробовуваного електродвигуна, у процесі обертання реєструють поточне значення крутного моменту Мпд, значення пускового моменту Мп в даному кутовому положенні ротора знаходять за формулою: Мп=Мр -Мпд. Основним недоліком описаного аналога є ускладнений процес виміру, великий час ведення вимірів, під час якого потрібно проводити кілька етапів реєстрації значень крутного моменту - необхідно зупиняти систему для з'єднання приводного електродвигуна (після його обертання протягом одного холостого обертання) з валом випробовуваного електродвигуна. Велика погрішність виміру, викликана залежністю вихідного сигналу від частоти обертання вала і від його кутового положення. Відомий спосіб виміру крутного моменту [а.с. СРСР №1796311, G01L3/10, 1990р.], що полягає у вимірі пружного деформування механічного елемента за заданим законом моменту щодо утворення зсуву. Кратний момент визначають за різницею значень частот коливань елемента, які відповідають недеформованому і деформованому положенню. При цьому вимірюють датчиком віброшвидкості зсув пружного елемента під дією перемінної складової вимірюваного крутного моменту. Основним недоліком аналога є те, що одержання достовірної інформації про крутний момент не представляється можливим через необхідність обліку великої кількості параметрів. Процес виміру трудомісткий, ускладнений (наприклад, додатково до операції порушення коливань механічного елемента роблять додаткову операцію - пружне деформування його в площині чутливості пропорційно швидкості зсуву механічного елемента). Крім цього, негативно на точність виміру впливають коливальні процеси, на основі яких побудований спосіб виміру крутного моменту. Відомий також спосіб виміру крутного моменту [а.с. СРСР №1778561, G01L3/10, 1990р., прототип], що полягає у вимірі, за заданим законом моменту щодо створювання зсуву, інформаційних імпульсів вимірювачами крутного моменту з використанням деформації пружного елемента, і в наступній обробці імпульсів. При цьому за різницею зсуву середнього перерізу пружного елемента типу «білячого колеса» щодо його торців визначають крутний момент. Для чого роздільно вимірюють зсув середнього перерізу пружного елемента щодо кожного з його торців, обчислюють суму обмірюваних зсувів і по ній знаходять осьове навантаження. Основним недоліком прототипу є низька точність виміру, обумовлена тим, що через роздільний вимір пружного зсуву середнього перерізу щодо кожного з торців «білячого колеса» збільшуються погрішності усереднення, по причині переміщеннями складових крутних моментів. Крім того, під час виміру лінійних розмірів (що характерно для прототипу) мають місце значні погрішності, що спотворюють одержуваний результат та коливальні процеси, що протікають у пружному елементі, збільшують погрішність виміру параметрів. Для усунення зазначених недоліків удосконалено спосіб виміру крутного моменту. В основу корисної моделі поставлена задача удосконалення зазначеного об'єкту з метою одержання інформації з високою точністю вірогідності про обертовий момент, за рахунок підвищення точності вимірів шляхом зменшення погрішності усереднення. Поставлена задача досягається тим, що в удосконаленому способі виміру крутного моменту, який полягає у вимірі за заданим законом моменту щодо створювання зсуву інформаційних імпульсів вимірювачами крутного моменту з використанням деформації пружного елемента, і наступній обробці імпульсів. В ньому зсув фази інформаційних імпульсів під час обертання вала приводного двигуна і виконавчого механізму реєструють безконтактно імпульсними датчиками за допомогою вимірювальних дисків і пружним сендвичоподібним елементом, якими вони зв'язані між собою, та за різницею між силами обертання двигуна й опору обертанню виконавчого механізму визначають величину збільшення крутного моменту за заданим законом моменту щодо утворення зсуву пропорційно навантаженню, яке зростає. У способі, що заявляється, підвищують точність виміру за рахунок зниження контролюючих параметрів. У такому способі погрішності зведені практично до нуля. Коливання пружного елемента практично відсутні. Крім того, одержана інформація має високу точність вірогідності про обертовий момент за рахунок підвищення точності вимірів шляхом спрощення процесу виміру: під час виміру відсутні проміжні сигнали і знижений час ведення вимірів, кількість залежних величин, відсутній часовий поріг під час реєстрації каскаду імпульсів. Одержання достовірних інформаційних даних з використанням способу, що заявляється, не залежить від тимчасових і температурних змін у зв'язку з використанням у ній цифрової обробки даних. Пошук, здійснений за джерелами науково-технічної і патентної інформації, показав, що сукупність істотних ознак технічного рішення, яке заявляється, невідома. Таким чином, воно відповідає вимогам новизни. Корисна модель пояснюється графічними матеріалами. На кресленні зображена система виміру крутного моменту призначена для демонстрації способу. У систему виміру крутного моменту входить двигун 1 і виконавчий механізм 2, у яких є співвісні (обертові в одному напрямку) вали відповідно 3 і 4. Імпульсні датчики 5, 6 безконтактно зв'язані з валами (відповідно 3 і 4 виконавчого механізму 2, вони зв'язані між собою пружним елементом сендвичоподібної форми 7. Сигнали (імпульси) з датчиків 5 і 6 формуються за допомогою спеціальних схем перед подачею їх у пристрої для реєстрації й обробки сигналів 8. Аналогові сигнали з датчиків 5 і 6 перетворяться в цифрову форму за допомогою пристроїв 8. Імпульсні датчики 5 і 6, а також пружний елемент 7 і вимірювальні, наприклад зубцюваті, диски 9 і 10 утворюють вимірник крутного моменту. Вимірник являє собою сигнальне колесо, у якого вимірювальні (зубцюваті) диски 9 і 10 жорстко закріплені на співвісних валах 3 і 4 двигуна 1 і виконавчого механізму 2. Диски 9 і 10 встановлені з можливістю пружного взаємного радіального зсуву на величину пропорційну зростаючому навантаженню на валах 3 і 4 в межах пружних властивостей елемента 7. Кожен диск 9 і 10 безконтактно зв'язаний з відповідним імпульсним датчиком 5 і 6 для реєстрації частоти обертання валів 3 і 4 під час постійного навантаження і під час перемінного, що викликає зсув фази інформаційних імпульсів, що надходять. Спосіб реалізується так. Під час обертання валів 3 і 4 без навантаження, імпульси з обох датчиків 5 і 6 мають однакову частоту і фазу (відставання або випередження інформаційних імпульсів - зсув фаз - відсутній). Під час зростання навантаження вали 3 і 4 зміщаються радіально відносно один одного в межах пружних властивостей елемента 7, при цьому зсув фази інформаційних імпульсів збільшується пропорційно зростаючому навантаженню. Далі проводять цифрову або аналогову обробку на пристроях для обробки сигналів 8, після чого одержують величину контрольованого крутного моменту. За допомогою заявленого об'єкту можна одержувати інформацію з високою точністю достовірності про обертовий момент за рахунок підвищення точності вимірів шляхом спрощення процесу виміру: при вимірі відсутні проміжні сигнали (імпульси) і знижений час ведення вимірів, максимально зменшена кількість залежних одна від одної величин, відсутній часовий поріг під час реєстрації зсуву фази між імпульсами. У зв'язку з цим спосіб, що заявляється, найбільше повно відповідають сучасним умовам. Датчики крутного моменту 2 можна ефективно використовувати в системах гідромеханічної автоматичної коробки передач, антиблокувальній системі гальм, у системі перерозподілу крутного моменту по осях, якщо їх встановити у відповідні точки трансмісії.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measuring torque
Автори англійськоюMiakotin Dmytro Оlекsаndrоvусh
Назва патенту російськоюСпособ измерения крутящего момента
Автори російськоюМякотин Дмитрий Александрович
МПК / Мітки
Мітки: моменту, виміру, крутного, спосіб
Код посилання
<a href="https://ua.patents.su/2-23358-sposib-vimiru-krutnogo-momentu.html" target="_blank" rel="follow" title="База патентів України">Спосіб виміру крутного моменту</a>
Цифровий вимірювач крутного моменту і потужності газотурбінного двигуна
Номер патенту: 29064
Опубліковано: 16.10.2000
Автори: Гапєєв Володимир Опанасович, Лященко Валентин Григорович, Савічев Серафім Павлович, Зубенін Сергій Дмитрович
МПК: G01L 3/00
Мітки: моменту, газотурбінного, двигуна, вимірювач, крутного, цифровий, потужності
Формула / Реферат:
Цифровий вимірювач крутного моменту і потужності газотурбінного двигуна, що містить вал з пружним відрізком, на кінцях якого розміщені дві шестерні з зубцями, що діють на імпульсні датчики, підключені через узгоджуючи пристрої лічильного входу тригepa і першої схеми збіжності, вихід якої підключений на роздільний вхід тригера, а вихід тригера підключений на другий вхід другої схеми збіжності, на перший вхід якої підключений вихід генератора...
Спосіб регулювання крутного моменту муфти ковзання
Номер патенту: 8378
Опубліковано: 15.08.2005
Автор: Чиннов В'ячеслав Андрійович
МПК: F16D 7/00
Мітки: ковзання, спосіб, регулювання, муфти, моменту, крутного
Формула / Реферат:
Спосіб регулювання крутного моменту муфти ковзання, який включає регулювання крутного моменту між провідною та відомою ланками муфти, який відрізняється тим, що постійність швидкості обертання і передаваного крутного моменту регулюються за рахунок притиску ланок відцентровою силою обертової маси.
Спосіб регулювання крутного моменту муфти ковзання
Номер патенту: 9117
Опубліковано: 15.09.2005
Автор: Чиннов В'ячеслав Андрійович
МПК: F16D 7/00
Мітки: ковзання, крутного, муфти, спосіб, регулювання, моменту
Формула / Реферат:
Спосіб регулювання крутного моменту муфти ковзання, що включає регулювання крутного моменту між ведучою й веденою ланками муфти шляхом проковзування їх між собою, який відрізняється тим, що проковзування ланок здійснюють під дією відцентрових сил.
Спосіб регулювання крутного моменту муфти ковзання
Номер патенту: 3608
Опубліковано: 15.12.2004
Автор: Чиннов В'ячеслав Андрійович
МПК: F16D 7/00
Мітки: спосіб, моменту, регулювання, ковзання, муфти, крутного
Формула / Реферат:
Спосіб регулювання крутного моменту муфти ковзання, що включає регулювання крутного моменту між провідною і веденою ланками муфти шляхом їх проковзування між собою, який відрізняється тим, що проковзування ланок здійснюють зміною форми ланок шляхом теплової дії, що виникає при терті їх між собою, а ланки виконують з матеріалів з термомеханічною здатністю змінювати власну форму при зміні температури.
Пристрій для вимірювання величини крутного моменту
Номер патенту: 52275
Опубліковано: 16.12.2002
Автори: Комар Роман Васильович, Лясота Оксана Михайлівна, Гурик Олег Ярославович, Білик Стефанія Григорівна, Гупка Богдан Васильович
Мітки: моменту, крутного, вимірювання, величини, пристрій
Формула / Реферат:
Пристрій для вимірювання величини крутного моменту, який виконаний у вигляді двох пустотілих барабанів, які встановлені на привідний вал пружного елемента, механізмів приводу, навантажувача і основи, який відрізняється тим, що лівий і правий торці пружного елемента є у взаємодії з упорними втулками, які встановлені на циліндричні шийки привідного вала, а посередині їх ширини з торця з боку пружного елемента виконані виточки радіусом, більшим...
Попередній патент: Музичний автомат
Наступний патент: Таблетки антистресорної, стресопротекторної і ноотропної дії
Випадковий патент: Пристрій для отримання легкої води