Безступінчастий планетарний механізм повороту гусеничних самохідних машин
Номер патенту: 30627
Опубліковано: 11.03.2008
Автори: Самородов Вадим Борисович, Яловол Іван Володимирович
Формула / Реферат
Безступінчастий планетарний механізм повороту гусеничних самохідних машин, що складається з гідрооб'ємної передачі, що включає регульований гідронасос та нерегульований гідромотор, і механічної частини, що складається з двох планетарних механізмів, який відрізняється тим, що їх сонячні шестерні закріплені на одному валу, привід якого здійснюють через конічну зубчасту передачу від коробки передач, при цьому на вхідному валу встановлене гальмо, водила планетарних механізмів є вихідними ланками механізму повороту, епіциклічні шестерні приводяться від конічної зубчастої передачі вихідною шестірнею редуктора гідронасоса гідрооб'ємної передачі.
Текст
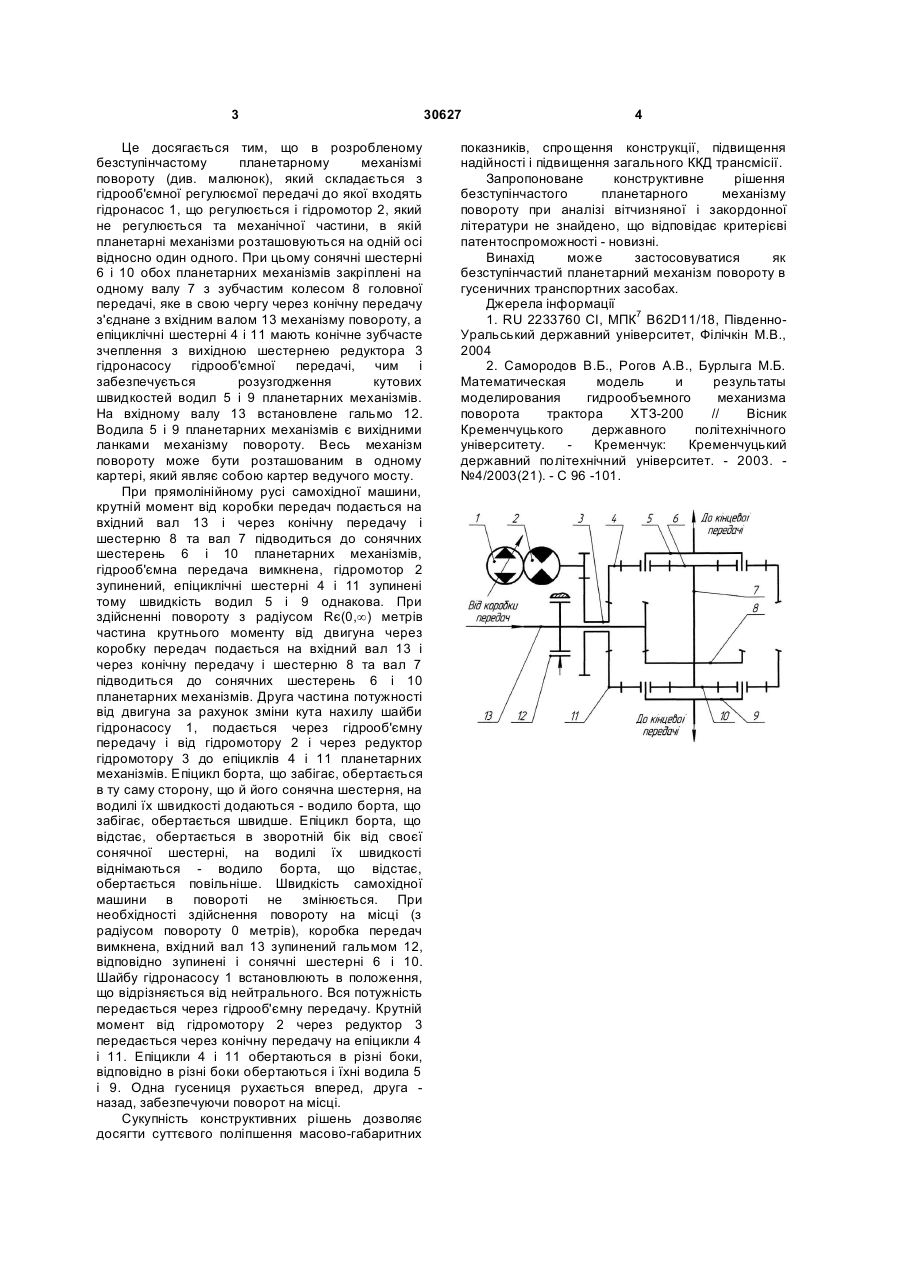
Безступінчастий планетарний механізм повороту гусеничних самохідних машин, що складається з гідрооб'ємної передачі, що включає регульований гідронасос та нерегульований 3 Це досягається тим, що в розробленому безступінчастому планетарному механізмі повороту (див. малюнок), який складається з гідрооб'ємної регулюємої передачі до якої входять гідронасос 1, що регулюється і гідромотор 2, який не регулюється та механічної частини, в якій планетарні механізми розташовуються на одній осі відносно один одного. При цьому сонячні шестерні 6 і 10 обох планетарних механізмів закріплені на одному валу 7 з зубчастим колесом 8 головної передачі, яке в свою чергу через конічну передачу з'єднане з вхідним валом 13 механізму повороту, а епіциклічні шестерні 4 і 11 мають конічне зубчасте зчеплення з вихідною шестернею редуктора 3 гідронасосу гідрооб'ємної передачі, чим і забезпечується розузгодження кутових швидкостей водил 5 і 9 планетарних механізмів. На вхідному валу 13 встановлене гальмо 12. Водила 5 і 9 планетарних механізмів є вихідними ланками механізму повороту. Весь механізм повороту може бути розташованим в одному картері, який являє собою картер ведучого мосту. При прямолінійному русі самохідної машини, крутній момент від коробки передач подається на вхідний вал 13 і через конічну передачу і шестерню 8 та вал 7 підводиться до сонячних шестерень 6 і 10 планетарних механізмів, гідрооб'ємна передача вимкнена, гідромотор 2 зупинений, епіциклічні шестерні 4 і 11 зупинені тому швидкість водил 5 і 9 однакова. При здійсненні повороту з радіусом Rє(0,¥) метрів частина крутнього моменту від двигуна через коробку передач подається на вхідний вал 13 і через конічну передачу і шестерню 8 та вал 7 підводиться до сонячних шестерень 6 і 10 планетарних механізмів. Друга частина потужності від двигуна за рахунок зміни кута нахилу шайби гідронасосу 1, подається через гідрооб'ємну передачу і від гідромотору 2 і через редуктор гідромотору 3 до епіциклів 4 і 11 планетарних механізмів. Епіцикл борта, що забігає, обертається в ту саму сторону, що й його сонячна шестерня, на водилі їх швидкості додаються - водило борта, що забігає, обертається швидше. Епіцикл борта, що відстає, обертається в зворотній бік від своєї сонячної шестерні, на водилі їх швидкості віднімаються - водило борта, що відстає, обертається повільніше. Швидкість самохідної машини в повороті не змінюється. При необхідності здійснення повороту на місці (з радіусом повороту 0 метрів), коробка передач вимкнена, вхідний вал 13 зупинений гальмом 12, відповідно зупинені і сонячні шестерні 6 і 10. Шайбу гідронасосу 1 встановлюють в положення, що відрізняється від нейтрального. Вся потужність передається через гідрооб'ємну передачу. Крутній момент від гідромотору 2 через редуктор 3 передається через конічну передачу на епіцикли 4 і 11. Епіцикли 4 і 11 обертаються в різні боки, відповідно в різні боки обертаються і їхні водила 5 і 9. Одна гусениця рухається вперед, друга назад, забезпечуючи поворот на місці. Сукупність конструктивних рішень дозволяє досягти суттєвого поліпшення масово-габаритних 30627 4 показників, спрощення конструкції, підвищення надійності і підвищення загального ККД трансмісії. Запропоноване конструктивне рішення безступінчастого планетарного механізму повороту при аналізі вітчизняної і закордонної літератури не знайдено, що відповідає критерієві патентоспроможності - новизні. Винахід може застосовуватися як безступінчастий планетарний механізм повороту в гусеничних транспортних засобах. Джерела інформації 1. RU 2233760 СІ, МПК7 B62D11/18, ПівденноУральський державний університет, Філічкін М.В., 2004 2. Самородов В.Б., Рогов А.В., Бурлыга М.Б. Математическая модель и результаты моделирования гидрообъемного механизма поворота трактора ХТЗ-200 // Вісник Кременчуцького державного політехнічного університету. Кременчук: Кременчуцький державний політехнічний університет. - 2003. №4/2003(21). - С 96 -101.
ДивитисяДодаткова інформація
Назва патенту англійськоюStageless planetary steering drive of caterpillar self-propelled machines
Автори англійськоюYalovol Ivan Volodymyrovych, Samorodov Vadym Borysovych
Назва патенту російськоюБесступенчатый планетарный механизм поворота гусеничных самоходных машин
Автори російськоюЯловол Иван Владимирович, Самородов Вадим Борисович
МПК / Мітки
МПК: B62D 11/00
Мітки: повороту, машин, планетарний, механізм, гусеничних, безступінчастий, самохідних
Код посилання
<a href="https://ua.patents.su/2-30627-bezstupinchastijj-planetarnijj-mekhanizm-povorotu-gusenichnikh-samokhidnikh-mashin.html" target="_blank" rel="follow" title="База патентів України">Безступінчастий планетарний механізм повороту гусеничних самохідних машин</a>
Двопотоковий механізм повороту

Номер патенту: 71845
Опубліковано: 15.12.2004
Автори: Поляшенко Сергій Олексійович, Лебедєв Сергій Анатольйович, Парфьонова Наталя Сергійовна, Лебедєв Анатолій Тихонович
МПК: B60K 17/06
Мітки: механізм, повороту, двопотоковий
Формула / Реферат:
Двопотоковий механізм повороту, що містить підсумовуючі планетарні ряди правого і лівого бортів, що відрізняється тим, що в нього введені додаткові підсумовуючі планетарні ряди, причому їх епіцикли зв'язані між собою клинопасовою передачею з варіатором, а їх водила і сонячні шестерні мають твердий зв'язок з відповідними водилами і сонячними шестернями основних планетарних рядів.
Механізм передач і повороту транспортного засобу
Номер патенту: 73322
Опубліковано: 15.07.2005
Автори: Пономарьов Євген Павлович, Федотов Володимир Ілліч
МПК: B60K 17/10, F16H 47/00
Мітки: передач, механізм, повороту, транспортного, засобу
Формула / Реферат:
Механізм передач і повороту транспортного засобу, що містить дві гідравлічно зв'язані між собою гідромашини, щонайменше одна з яких регульована, ведучий, проміжний та вихідний вали, кінематично зв'язані з гідромашинами, коробку передач з керованими муфтами, два планетарних диференціали, що з'єднані через коробку передач з ведучим валом, сонячні шестерні, які кінематично зв'язані з нерегульованою гідромашиною, епіцикл першого планетарного...
Механізм повороту конвертера
Номер патенту: 22548
Опубліковано: 25.04.2007
Автори: Брук Олександр Семенович, Гатілова Валентина Іванівна, Мироненко Олександр Васильович
Мітки: механізм, повороту, конвертера
Формула / Реферат:
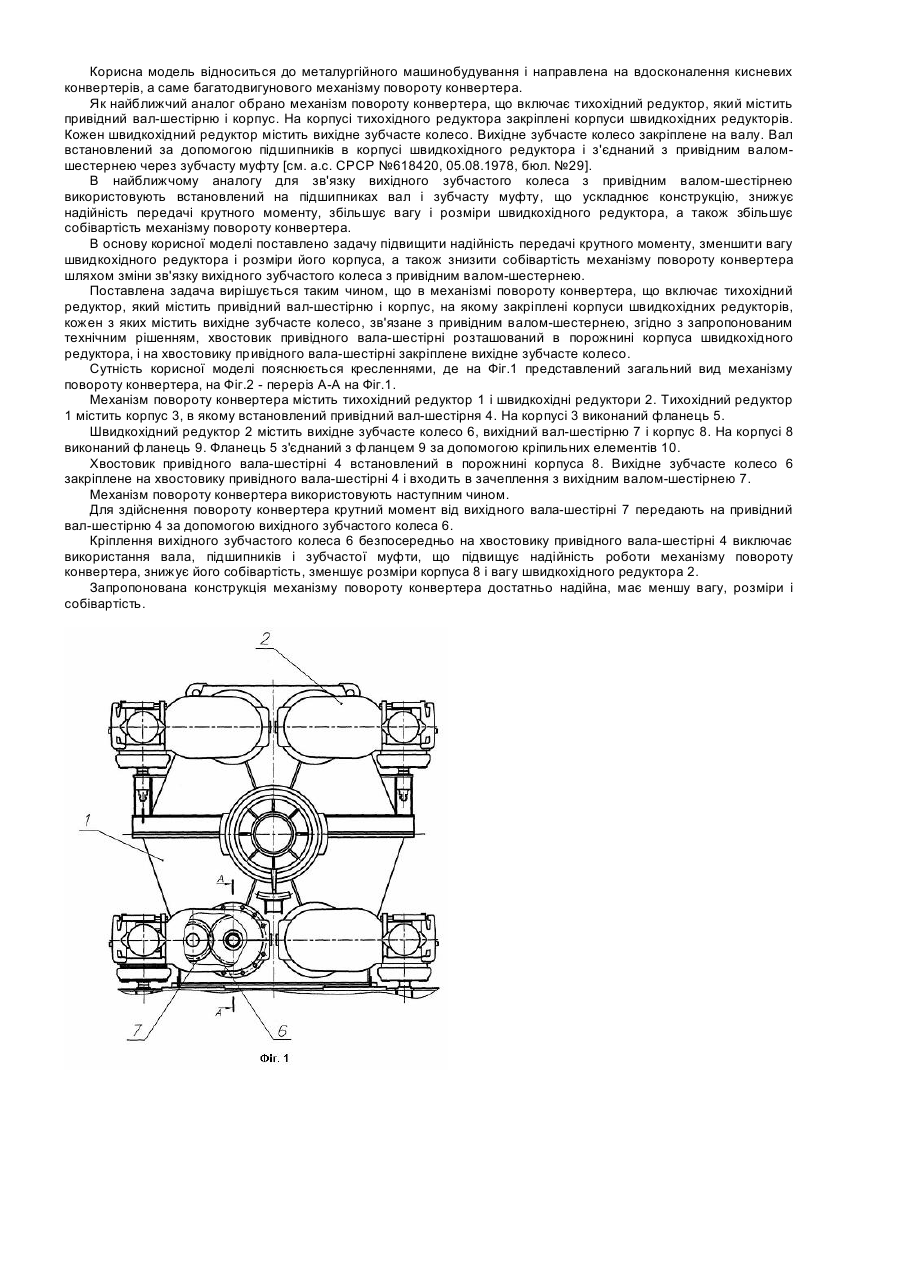
Механізм повороту конвертера, що включає тихохідний редуктор, який містить привідний вал-шестірню і корпус, на якому закріплені корпуси швидкохідних редукторів, кожен з яких містить вихідне зубчасте колесо, зв'язане з привідним валом-шестірнею, який відрізняється тим, що хвостовик привідного вала-шестірні розташований в порожнині корпусу швидкохідного редуктора, і на хвостовику привідного вала-шестірні закріплене вихідне зубчасте колесо.
Зубчато-важільний планетарний механізм
Номер патенту: 53866
Опубліковано: 17.02.2003
Автори: Смутко Світлана Валеріївна, Параска Георгій Борисович, Самолюк Олег Григорович
МПК: F16H 1/28, F16H 37/00
Мітки: планетарний, зубчато-важільний, механізм
Формула / Реферат:
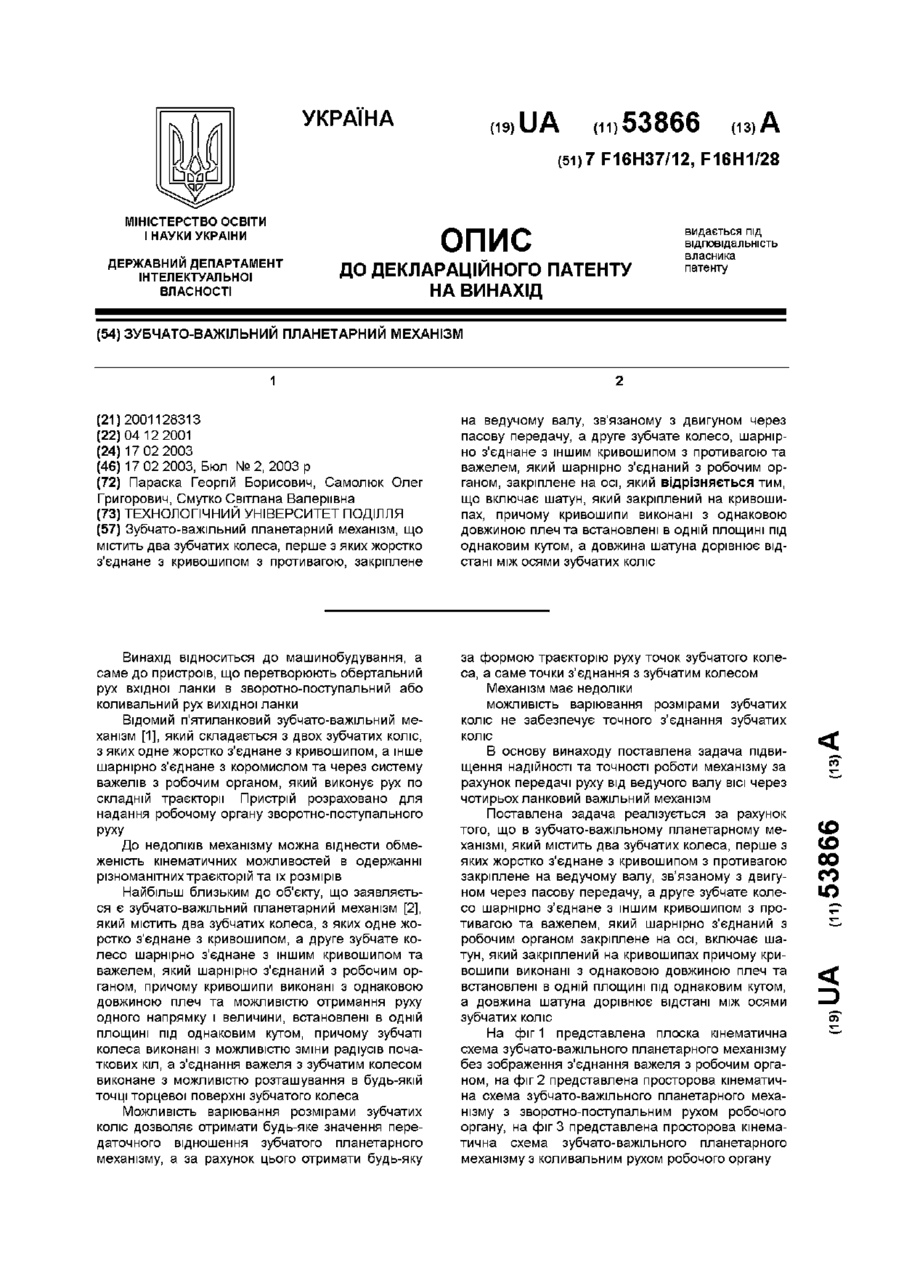
Зубчато-важільний планетарний механізм, що містить два зубчатих колеса, перше з яких жорстко з'єднане з кривошипом з противагою, закріплене на ведучому валу, зв'язаному з двигуном через пасову передачу, а друге зубчате колесо, шарнірно з'єднане з іншим кривошипом з противагою та важелем, який шарнірно з'єднаний з робочим органом, закріплене на осі, який відрізняється тим, що включає шатун, який закріплений на кривошипах, причому кривошипи...
Зубчасто-важільний планетарний механізм
Номер патенту: 17267
Опубліковано: 15.09.2006
Автори: Смутко Світлана Валеріївна, Параска Георгій Борисович, Неймак Віталій Станіславович
МПК: F16H 1/28, F16H 37/00
Мітки: механізм, планетарний, зубчасто-важільний
Формула / Реферат:
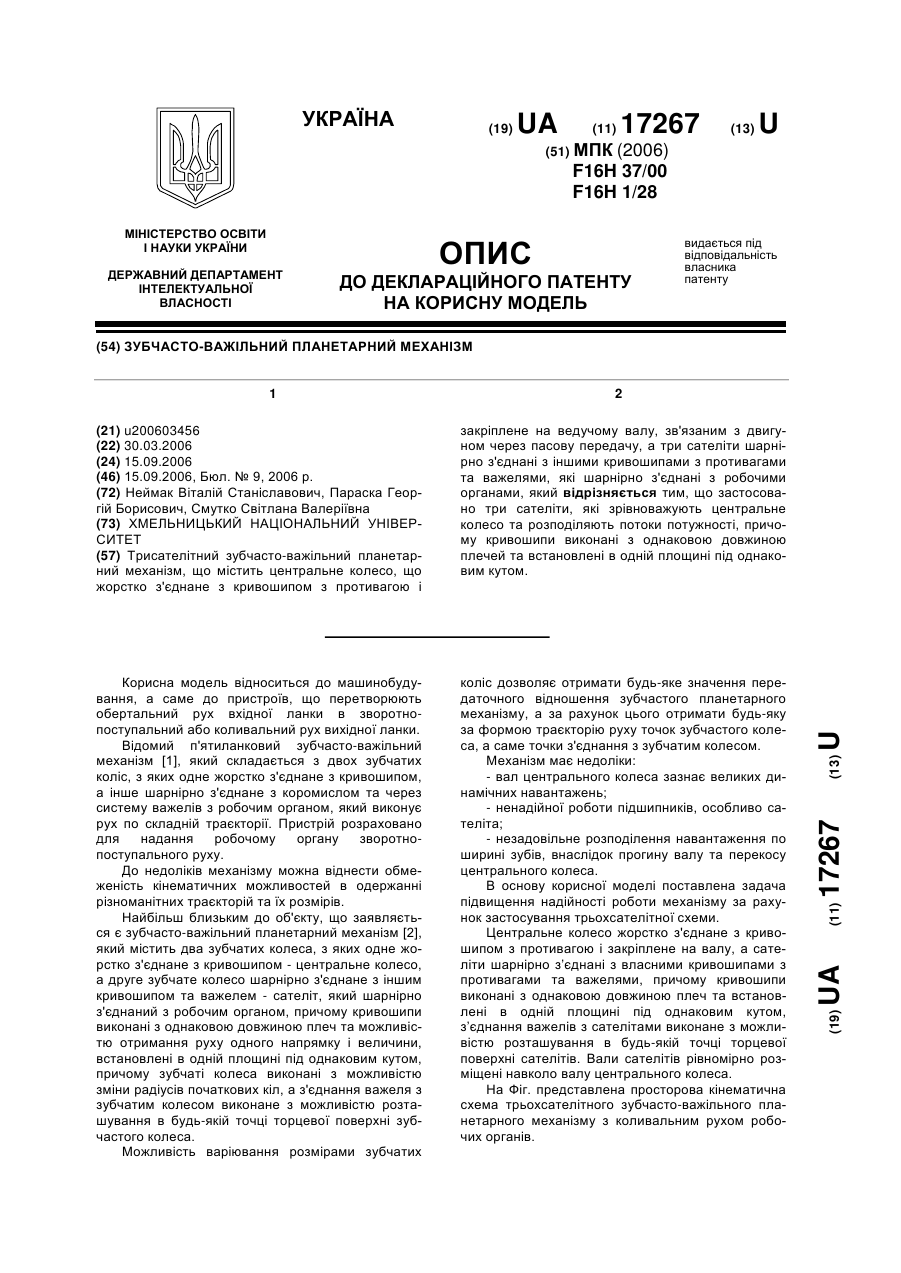
Трисателітний зубчасто-важільний планетарний механізм, що містить центральне колесо, що жорстко з'єднане з кривошипом з противагою і закріплене на ведучому валу, зв'язаним з двигуном через пасову передачу, а три сателіти шарнірно з'єднані з іншими кривошипами з противагами та важелями, які шарнірно з'єднані з робочими органами, який відрізняється тим, що застосовано три сателіти, які зрівноважують центральне колесо та розподіляють потоки...
Попередній патент: Пристрій для локалізації вибухів вугільного пилу
Наступний патент: Спосіб отримання залишку по модулю незвідного багаточлена
Випадковий патент: Інструмент для моделювання механічної дозованої травми печінки тварин в умовах гострого експерименту