Система визначення маршруту руху транспортного об’єкта
Номер патенту: 45148
Опубліковано: 26.10.2009
Автори: Бандура Іван Миколайович, Дорош Ігор Сергійович, Дергачев Костянтин Юрійович
Формула / Реферат
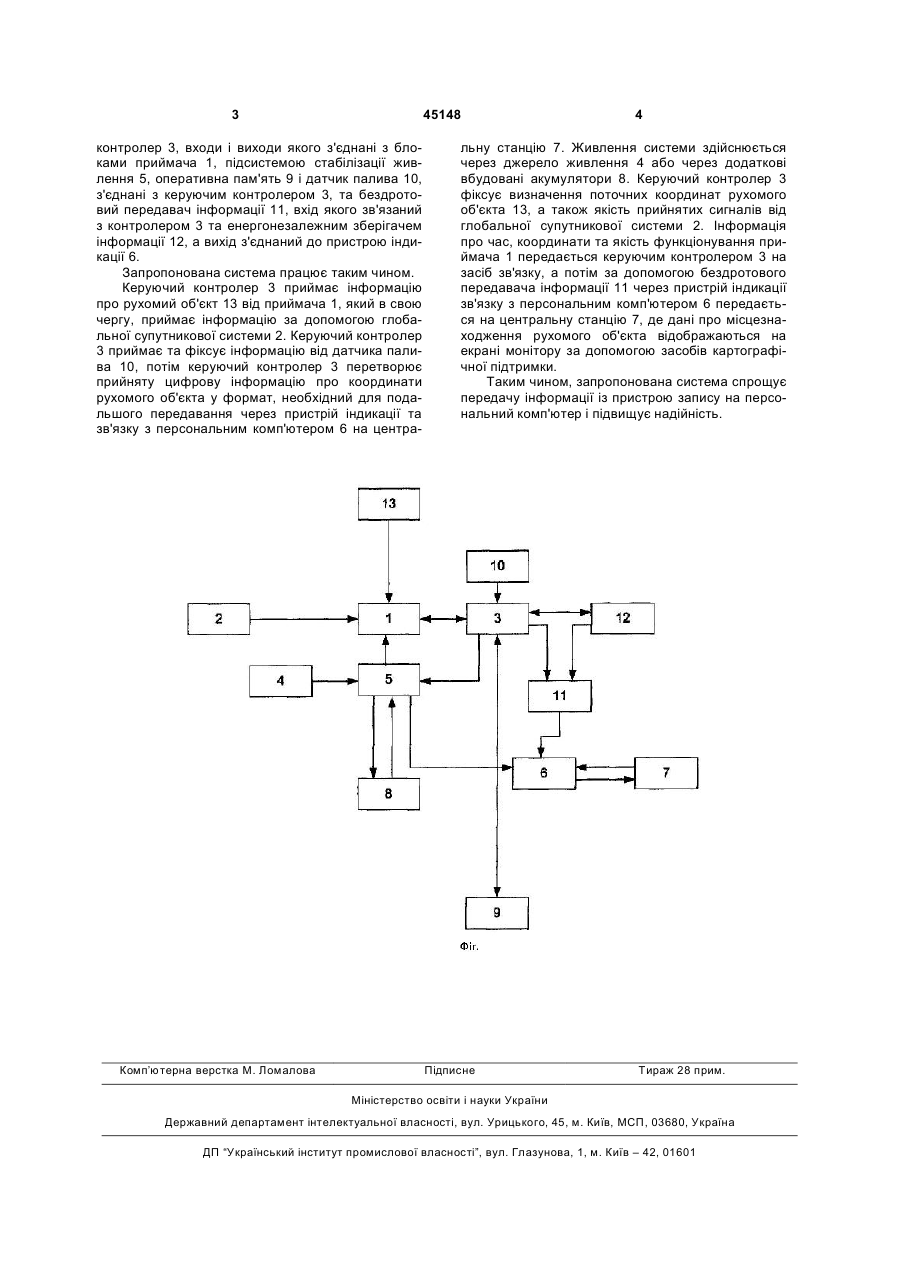
Система визначення маршруту руху транспортного об'єкта, яка містить приймач, зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вихід якого послідовно через підсистему стабілізації живлення та пристрій індикації з персональним комп'ютером з'єднаний з центральною станцією, вбудовані акумулятори, входи і виходи яких з'єднані з підсистемою стабілізації живлення, керуючий контролер, входи і виходи якого з'єднані з блоками приймача, пристрою стабілізації живлення, яка відрізняється тим, що введені оперативна пам'ять і датчик палива, з'єднані з керуючим контролером, та бездротовий передавач інформації, вхід якого зв'язаний з контролером та енергонезалежним зберігачем інформації, а вихід приєднаний до пристрою індикації.
Текст
Система визначення маршруту руху транспортного об'єкта, яка містить приймач, зв'язаний із глобальною супутниковою системою та керуючим контролером, джерело живлення, вихід якого по 3 45148 контролер 3, входи і виходи якого з'єднані з блоками приймача 1, підсистемою стабілізації живлення 5, оперативна пам'ять 9 і датчик палива 10, з'єднані з керуючим контролером 3, та бездротовий передавач інформації 11, вхід якого зв'язаний з контролером 3 та енергонезалежним зберігачем інформації 12, а вихід з'єднаний до пристрою індикації 6. Запропонована система працює таким чином. Керуючий контролер 3 приймає інформацію про рухомий об'єкт 13 від приймача 1, який в свою чергу, приймає інформацію за допомогою глобальної супутникової системи 2. Керуючий контролер 3 приймає та фіксує інформацію від датчика палива 10, потім керуючий контролер 3 перетворює прийняту цифрову інформацію про координати рухомого об'єкта у формат, необхідний для подальшого передавання через пристрій індикації та зв'язку з персональним комп'ютером 6 на центра Комп’ютерна верстка М. Ломалова 4 льну станцію 7. Живлення системи здійснюється через джерело живлення 4 або через додаткові вбудовані акумулятори 8. Керуючий контролер 3 фіксує визначення поточних координат рухомого об'єкта 13, а також якість прийнятих сигналів від глобальної супутникової системи 2. Інформація про час, координати та якість функціонування приймача 1 передається керуючим контролером 3 на засіб зв'язку, а потім за допомогою бездротового передавача інформації 11 через пристрій індикації зв'язку з персональним комп'ютером 6 передається на центральну станцію 7, де дані про місцезнаходження рухомого об'єкта відображаються на екрані монітору за допомогою засобів картографічної підтримки. Таким чином, запропонована система спрощує передачу інформації із пристрою запису на персональний комп'ютер і підвищує надійність. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for determination of route of motion of transport object
Автори англійськоюDerhachov Kostiantyn Yuriiovych, Bandura Ivan Mykolaiovych, Dorosh Ihor Serhiiovych
Назва патенту російськоюСистема определения маршрута движения транспортного объекта
Автори російськоюДергачев Константин Юрьевич, Бандура Иван Николаевич, Дорош Игорь Сергеевич
МПК / Мітки
МПК: G01S 3/02
Мітки: транспортного, руху, об'єкта, маршруту, система, визначення
Код посилання
<a href="https://ua.patents.su/2-45148-sistema-viznachennya-marshrutu-rukhu-transportnogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Система визначення маршруту руху транспортного об’єкта</a>
Система відображення місцезнаходження рухомого об`єкта
Номер патенту: 36559
Опубліковано: 27.10.2008
Автори: Дергачов Костянтин Юрійович, Шишова Наталія Олександрівна, Бандура Іван Миколайович
МПК: G01S 3/02
Мітки: система, місцезнаходження, відображення, рухомого, об'єкта
Формула / Реферат:
Система відображення місцезнаходження рухомого об'єкта, що містить передавач і приймач, які розміщені на рухомому об'єкті, джерело живлення, вихід якого послідовно через підсистему стабілізації живлення та пристрій індикації та зв'язку з персональним комп'ютером з'єднаний з центральною станцією, яка відрізняється тим, що в додатково введені глобальна супутникова система, вхід якої з'єднаний з виходом передавача, а вихід з'єднаний з приймачем,...
Спосіб визначення маршруту руху наземного транспортного засобу у вибраний проміжок часу
Номер патенту: 57202
Опубліковано: 16.06.2003
Автор: Олексієнко Олег Володимирович
МПК: G01C 7/00, G01C 21/34
Мітки: проміжок, визначення, наземного, руху, часу, спосіб, транспортного, засобу, маршруту, вибраний
Формула / Реферат:
Спосіб визначення маршруту рухання наземного транспортного засобу у вибраний проміжок часу що включає читання дискретної інформації від супутників GPS та ГЛОНАСС про місцезнаходження наземного транспортного засобу, запис та зберігання отриманої інформації, обробку записаної інформації з допомогою спеціального програмного забезпечення комп'ютерів і вивід здобутих результатів в системах відображення інформації, який відрізняється тим, що для...
Спосіб визначення режиму руху колісного транспортного засобу
Номер патенту: 29824
Опубліковано: 15.11.2000
Автори: Бобровська Наталія Генадіївна, Бобровський Генадій Олександрович
МПК: B61C 15/00, G01P 3/02
Мітки: спосіб, засобу, транспортного, визначення, режиму, колісного, руху
Формула / Реферат:
Спосіб визначення режиму руху колісного транспортного засобу, що включає операції реєстрації швидкості обертання ведучих та ведених коліс, її порівняння із заздалегідь установленим критичним значенням і реєстрацією режимів, при яких швидкість коліс не перевищує (перевищує) величину її критичного значення, який відрізняється тим, що режим руху визначають по взаємному розташуванню рухливих магнітних елементів, котрі можуть фіксуватися, або...
Багатоканальна система контролю стану об’єкта
Номер патенту: 37759
Опубліковано: 10.12.2008
Автори: Зимовін Анатолій Якович, Кірієнко Сергій Олександрович, Бандура Іван Миколайович
МПК: G07C 5/00
Мітки: об'єкта, система, стану, багатоканальна, контролю
Формула / Реферат:
Багатоканальна система контролю стану об'єкта, яка містить блок датчиків, виходи яких через контролер з'єднані з блоком індикації, яка відрізняється тим, що в неї введені блок уставок, з'єднаний з контролером та блоком зв'язку, годинник реального часу, вихід якого з'єднаний з входом контролера, диспетчер, виходи якого з'єднані з входами контролера та блока зв'язку, блок архівації, входи якого з'єднані з виходами контролера та блока...
Пристрій для визначення сили опору руху транспортного засобу на плаву
Номер патенту: 15660
Опубліковано: 30.06.1997
Автори: Єпіфанов Віталій Валерійович, Трушкін Віктор Миколайович
МПК: G01M 17/00
Мітки: опору, засобу, руху, сили, визначення, плаву, транспортного, пристрій
Формула / Реферат:
(57) Устройство для определения силы со противления движению транспортного средства на плаву, содержащее буксирный трос и динамометр, закрепленный с одной стороны к буксирному тросу, а с противоположной к корпусу транспортного средства, отличающееся тем, что в кормовой части корпуса транспортного средства закреплен бак с управляемым сливным клапаном, а на баке закреплен насос, выходной канал которого сообщен с баком, а входной - с...
Попередній патент: Автоматизована система розробки діагностичного забезпечення
Наступний патент: Відмовостійкий блок датчиків кутових швидкостей
Випадковий патент: Піраміда "призма"