Спосіб визначення режиму руху колісного транспортного засобу
Номер патенту: 29824
Опубліковано: 15.11.2000
Автори: Бобровська Наталія Генадіївна, Бобровський Генадій Олександрович
Формула / Реферат
Спосіб визначення режиму руху колісного транспортного засобу, що включає операції реєстрації швидкості обертання ведучих та ведених коліс, її порівняння із заздалегідь установленим критичним значенням і реєстрацією режимів, при яких швидкість коліс не перевищує (перевищує) величину її критичного значення, який відрізняється тим, що режим руху визначають по взаємному розташуванню рухливих магнітних елементів, котрі можуть фіксуватися, або переміщатися уздовж шляху, паралельного або (та) перпендикулярного продольній осі транспортного засобу, під впливом сили інерції, що виникає при прискоренні (сповільненні) транспортного засобу, а також під впливом спрямованих уздовж указаного шляху магнітних сил, створюємих електромагнітами таким чином, що на частину магнітних елементів діють зустрічно спрямовані магнітні сили, одна із яких пропорційна швидкості обертання ведучих коліс, а друга - швидкості обертання ведених коліс, в той час, як на другу частину магнітних елементів діють магнітні сили, пропорційні швидкості обертання тільки ведених (ведучих) коліс, при цьому указаний шлях поділяють на окремі дільниці, реєструють безконактним, або контактним методом знаходження магнітних елементів на будь-якому із них, перетворюють результати реєстрації місця знаходження магнітних елементів у двоїчні логічні сигнали (наприклад, шляхом формування логічного сигналу "1" при фіксації елемента на даній дільниці і сигналу "0" - при його відсутності на даній дільниці), і далі здійснюють декодування режиму руху транспортного засобу шляхом реалізації двоїчних логічних операцій (функцій) над указаними логічними сигналами, які використовують як аргументи функцій, що реалізуються.
Текст
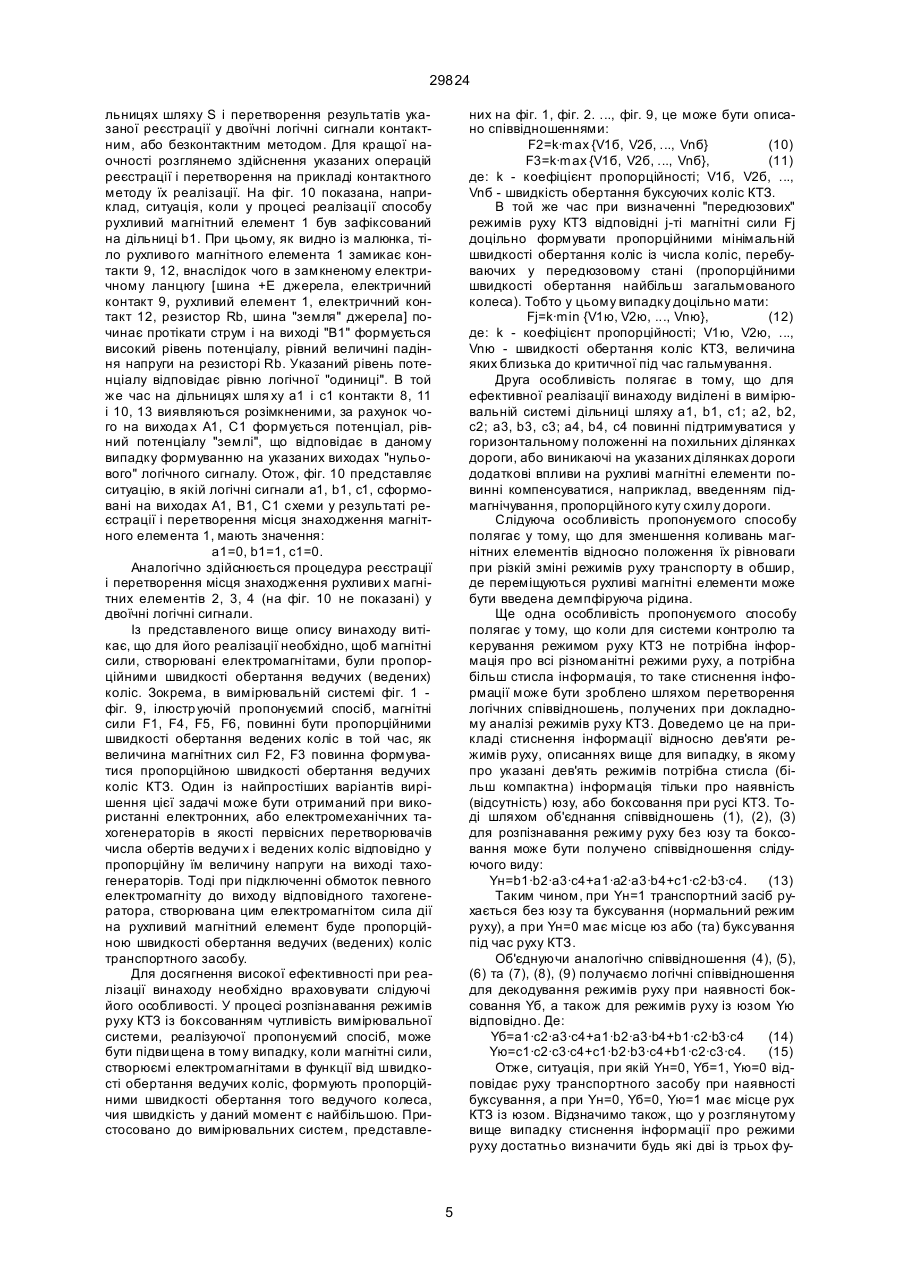
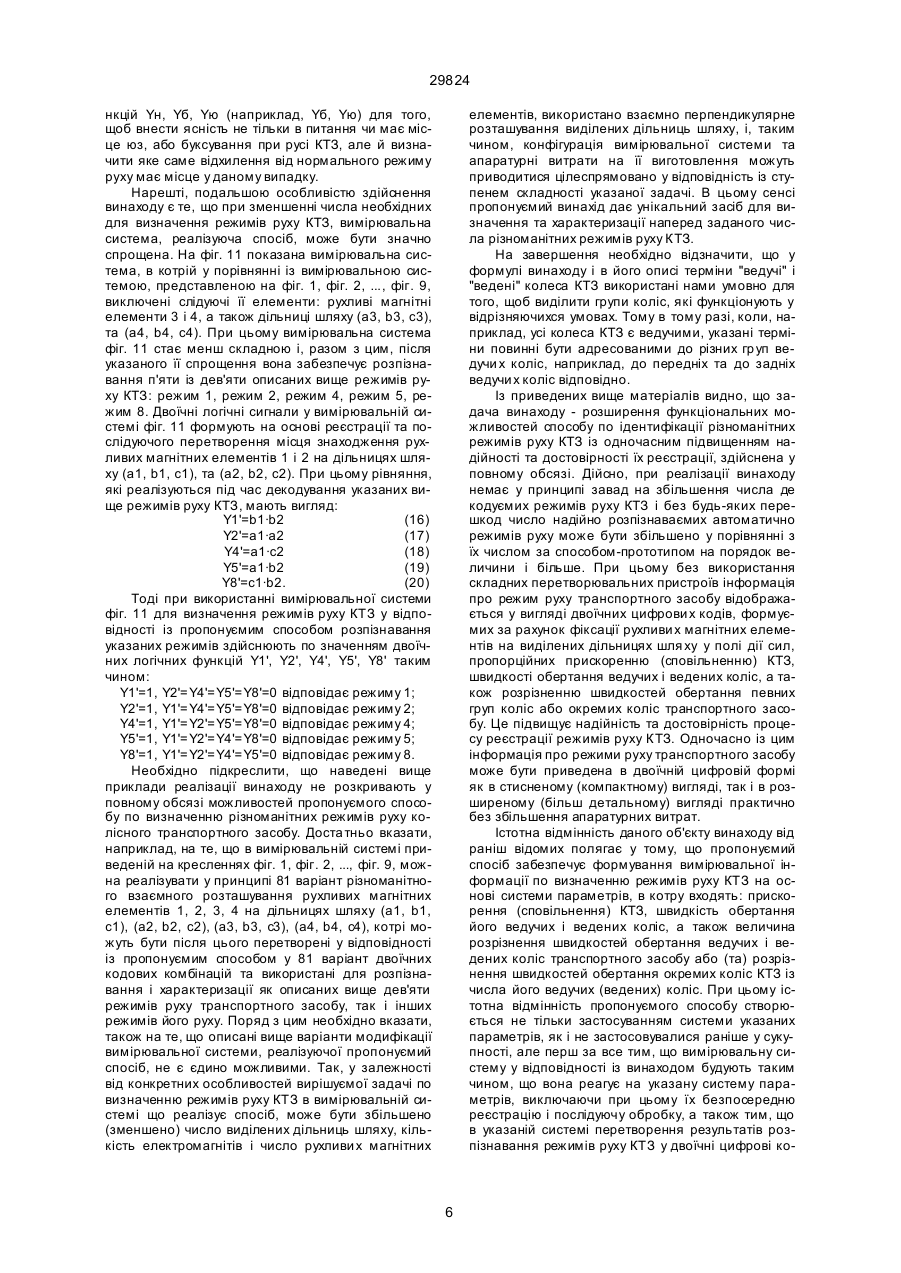
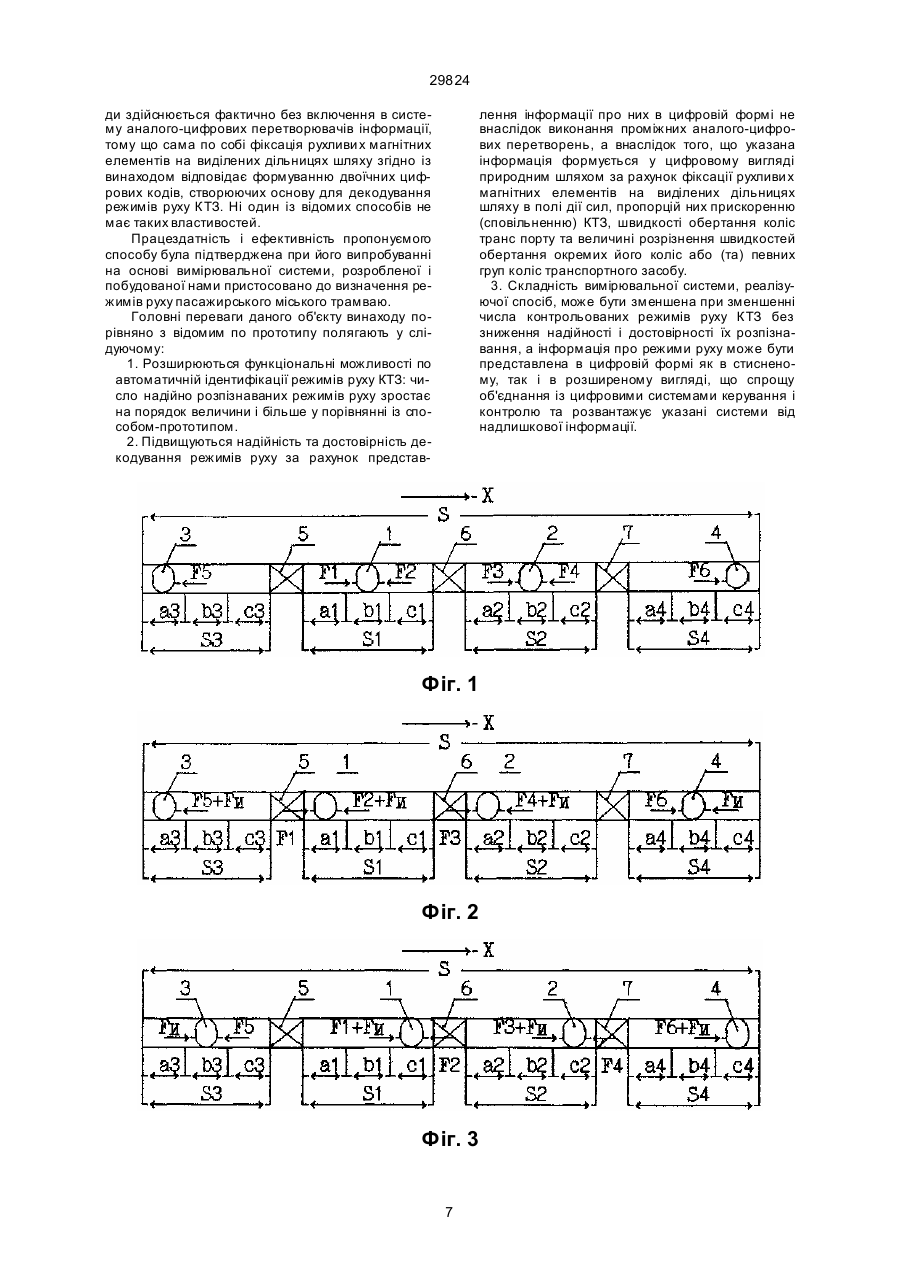
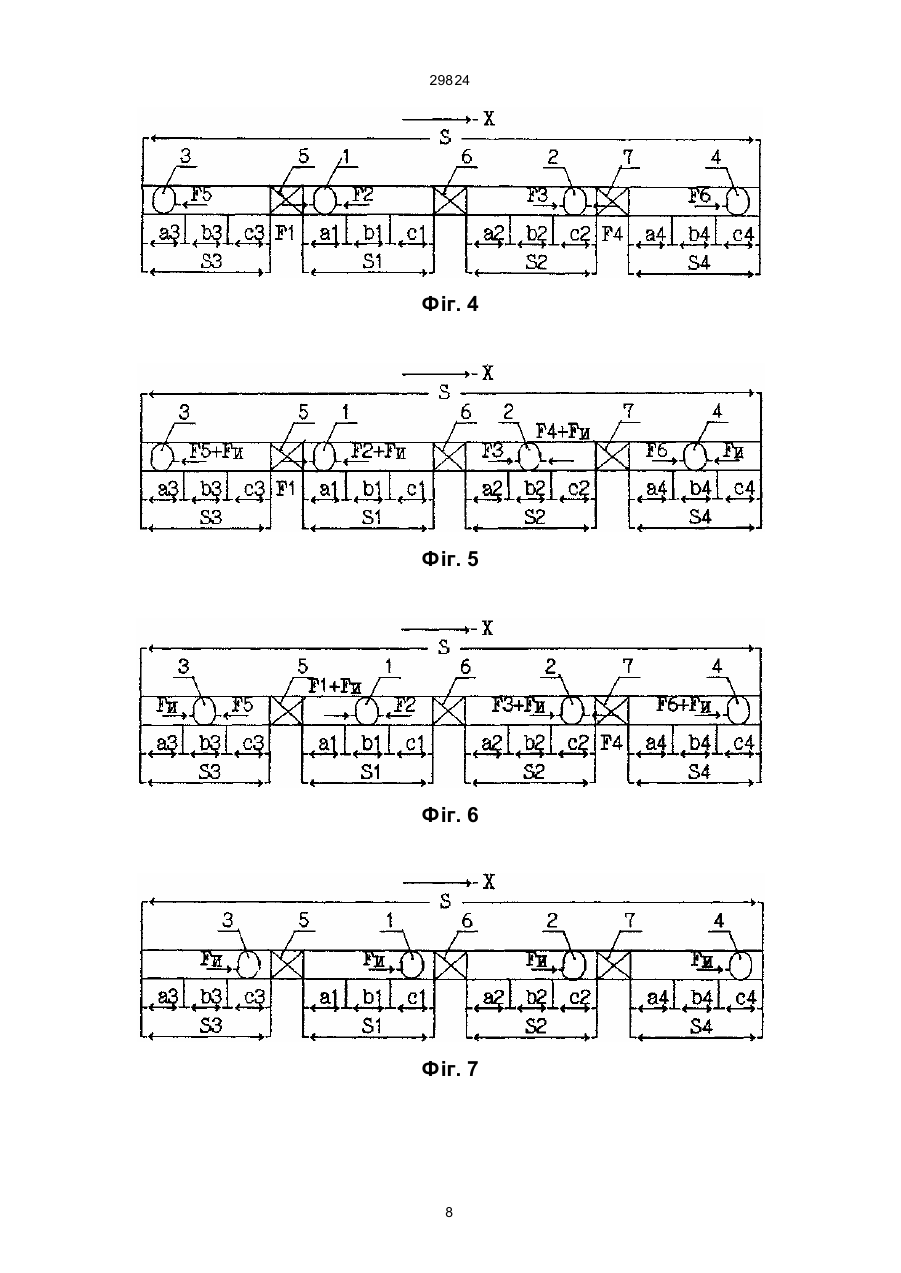
Спосіб визначення режиму руху колісного транспортного засобу, що включає операції реєстрації швидкості обертання ведучих та ведених коліс, її порівняння із заздалегідь установленим критичним значенням і реєстрацією режимів, при яких швидкість коліс не перевищує (перевищує) величину її критичного значення, який відрізняється тим, що режим руху визначають по взаємному розташуванню рухливи х магнітних елементів, котрі можуть фіксуватися, або переміщатися уздовж шляху, паралельного або (та) перпендікулярного продольній осі транспортного засобу, під впливом сили інерції, що виникає при прискоренні (сповільненні) транспортного засобу, а також під впливом 29824 значення. Завдяки цьому визначають нормальний режим руху транспорту і режим його руху із юзом. Зокрема, виникнення юзу визначають по зменшенню швидкості обертання колеса до нуля при включеному гальмі. Попередження юзу досягається шляхом повного або часткового припинення гальмування (див. розділ "Ворог номер один - юз" у книзі: Демидов В.Е. Електроніка чотирьох коліс. М.: Рад. радіо, 1977. - 80 с.). Цей спосіб визначення режиму руху колісного транспортного засобу прийнятий як прототип. Недоліком цього способу є його обмежені функціональні можливості по ідентифікації різноманітних режимів руху колісного транспорту, а також порівняно невисока надійність результатів визначення вказаних режимів. Дійсно, цей спосіб не дозволяє визначити наприклад, режим руху із буксуванням, котрий входить у перелік аварійно-небезпечних режимів руху. Окрім того, визначення режиму руху із юзом виключно тільки по нульовій швидкості обертання коліс не забезпечує необхідну достовірність результатів. Достатньо вказати, на приклад, що така ж швидкість обертання коліс може відповідати повній зупинці транспортного засобу. В основу винаходу поставлено задачі розширення функціональних можливостей способу по ідентифікації різноманітних режимів руху колісного транспорту і, раніш за все, його аварійно-небезпечних режимів руху як із юзом, так і з буксуванням, а також підвищення надійності та достовірності реєстрації нормальних і аварійно-небезпечних режимів руху шля хом формування результатів їх автоматичного розпізнавання у вигляді двоїчних логічних сигналів з урахуванням сили інерції, пропорційної прискоренню (сповільненню) транспорту, результируючої магнітної сили, пропорційної величині розрізнення швидкостей обертання коліс транспорту, а також із урахуванням результатів порівняння швидкості обертання коліс з її критичним значенням, встановленим заздалегідь. При цьому поряд із розширенням функціональних можливостей способу, підвищенням його надійності та достовірності спрощується об'єднання пристроїв, реалізуючих спосіб, із цифровими системами керування та контролю. Рішення поставленої задачі досягається тим, що у відомому способі визначення режиму руху колісного транспортного засобу, який включає операції реєстрації швидкості обертання ведучи х та ведених коліс, її порівняння із заздалегідь установленим критичним значенням і реєстрацію режимів, при яких швидкість коліс не перевищує (перевищує) її критичне значення, згідно із винаходом режим руху визначають по взаємному розташуванню рухливи х магнітних елементів, котрі можуть фіксуватися, або переміщатися уздовж шляху, паралельного або (та) перпендикулярного продольній осі транспортного засобу, під впливом сили інерції, виникаючої при прискоренні (сповільненні) транспортного засобу, а також під впливом спрямованих уздовж указаного шляху магнітних сил, створених електромагнітами таким чином, що на частину магнітних елементів діють зустрічно спрямовані магнітні сили, одна із яких пропорційна швидкості обертання ведучих коліс, а друга швидкості обертання ведених коліс, в той час як на другу частину магнітних елементів діють магнітні сили, пропорційні швидкості обертання тільки ведених (ведучи х) коліс, при цьому указаний шлях поділяють на окремі дільниці, реєструють безконтактним, або контактним методом знаходження магнітних елементів на будь-якому із них, перетворюють результати реєстрації місця знаходження магнітних елементів у двоїчні логічні сигнали (наприклад, шляхом формування логічного сигналу "1" при фіксації елемента на даній дільниці і сигналу "0" - при його відсутності на даній дільниці), і далі здійснюють декодування режиму руху транспортного засобу шляхом реалізації двоїчних логічних операцій (функцій) над указаними логічними сигналами, які використовують в якості аргументів реалізуємих логічних функцій. Опис пропонуємого способу пояснюється на прикладі розглядання процесу реєстрації дев'яти різноманітних режимів руху колісного транспортного засобу та ілюструється кресленнями, на яких показано взаємне розташування чотирьох рухливих магнітних елементів 1, 2, 3, 4 уздовж шляху S, поділеного на дільниці а1, b1, с1; а2, b2, с2; а3, b3, с3; а4, b4, с4 відповідно при реєстрації указаних режимів, а також сили, впливаючі на указані магнітні елементи при цьому: фі г. 1 - у режимі рівномірного руху без боксування та юзу; фіг. 2 - у режимі прискореного руху без боксування та юзу; фіг. 3 - у режимі сповільненого руху без боксування та юзу; фіг. 4 - у режимі руху із буксуванням при відсутності прискорення або сповільнення; фіг. 5 - у режимі руху із боксуванням при наявності прискорення; фіг. 6 - у режимі руху із боксуванням при наявності сповільнення; фіг. 7 - у режимі руху із юзом при блокуванні (зупинці) ведучи х та ведених коліс при наявності сповільнення транспорту; фіг. 8 - у режимі руху із юзом при блокуванні ведучих коліс при наявності сповільнення транспорту; фіг. 9 - у режимі руху із юзом при блокуванні ведених коліс при наявності сповільнення транспорту. Де: F1 впливаюча на магнітний елемент 1 магнітна сила, пропорційна швидкості обертання ведомих коліс, котра створюється електромагнітом 5 та орієнтована у напрямку руху транспорту; F2 - впливаюча на магнітний елемент 1 магнітна сила, пропорційна швидкості обертання ведучих коліс, яка створюється електромагнітом 6 і орієнтована у напрямку, протилежному напрямку руху транспорту; F3 - впливаюча на магнітний елемент 2 магнітна сила, пропорційна швидкості обертання ведучих коліс, котра створюється електромагнітом 6 і орієнтована у напрямку руху транс порту; F4 – впливаюча на магнітний елемент 2 магнітна сила, пропорційна швидкості обертання ведених коліс, котра створюється електромагнітом 7 і орієнтована у напрямку, протилежному напрямку руху транспорту; F5 - впливаюча на магнітний елемент 3 магнітна сила, пропорційна швидкості обертання ведених коліс, яка створюється електромагнітом 5 і орієнтована у напрямку, протилежному напрямку руху транспорту; F6 - впливаюча на магнітний елемент 4 магнітна сила, про порційна швидкості обертання ведених коліс, яка створюється електромагнітом 7 і орієнтована у напрямку руху транспорту; Fи - сила інерції (Fи=-m·а). впливаюча на магнітні елементи 1, 2, 3, 4 (m - маса магнітного елемента, а - прискорення); X - напрямок руху транспортного 2 29824 засобу; S1, S2, S3, S4 - діапазон переміщення магнітних елементів 1, 2, 3, 4 уздовж шляху S. Фіг. 10 ілюструє процес реєстрації місця розташування рухливого магнітного елемента 1 на дільницях шляху а1, b1, с1 контактним методом, а також перетворення результатів указаної реєстрації у двоїчні логічні сигнали. Для спрощення подальшого опису пропонуємого способу обговорювані тут режими руху колісного транспортного засобу (КТЗ), котрі ілюструються кресленнями фіг. 1, фіг. 2, ..., фіг. 9, назвемо умовно: режим 1, режим 2, ..., режим 9, відповідно. Ці режими руху згідно з винаходом визначають так. Режим 1. При рівномірному русі КТЗ без юзу та буксування магнітні елементи 1, 2, 3 і 4 під впливом магнітних сил F1, F2, F3, F4, F5, F6 фіксуються на дільницях b1, b2, а3 та с4 відповідно (див. фіг. 1). Це обумовлено тим, що на дільниці b1 в точці, рівновіддаленій від полюсів електромагнітів 5 і 6, створені цими електромагнітами магнітні сили F1 і F2, які діють на магнітний елемент 1, врівноважують одна одну, тому що вони рівні і протилежно спрямовані (F1=-F2) внаслідок рівності швидкостей обертання ведучих та ведених коліс при відсутності юзу і боксовання. Аналогічна ситуація має місце із силами, впливаючими на магнітний елемент 2 на дільниці b2 в точці, рівновіддаленій від полюсів електромагнітів 6 и 7, де сили F3 і F4 рівні і протилежно спрямовані (F3=-F4), в той же час на магнітний елемент 3 впливає магнітна сила F5, створена електромагнітом 5, а на магнітний елемент 4 - сила F6 електромагніту 7. Указані сили переміщують рухливі елементи 3 і 4 на дільниці а3 і с4 відповідно. Згідно з винаходом місце знаходження магнітних елементів 1, 2, 3, 4 на виділених дільницях шляху (а1, b1, с1), (а2, b2, с2), (а3, b3, с3), (а4, b4, с4) реєструють та перетворюють у двоїчні логічні сигнали за допомогою формування логічного сигналу "1" при знаходженні рухливого магнітного елемента на даній дільниці шляху і "0" сигналу при його відсутності. В даному випадку маємо: а1=0, b1=1, с1=0; а2=0, b2=1, с2=0; а3=1, b3=0, с3=0; а4=0, b4=0, с4=1. Тут і далі за текстом опису винаходу прийнято, що при указаному перетворенні імена двоїчних логічних перемінних відповідають іменам виділених дільниць шляху. Таким чином, з урахуванням представлених вище даних режим рівномірного руху транспорту без юзу і буксування (режим 1) може бути декодованим завдяки реалізації функції логічного перемноження сигналів b1, b2, а3, с4. Y1=b1·b2·а3·с4. (1) Із цього витікає, що при Y1=1 транспортний засіб здійснює рівно мірний рух без юзу та буксування, а при Y1=0 - має місце інший режим руху. Режим 2. Прискорений рух КТЗ без юзу та буксування відрізняється від режиму 1 тим, що на рухливі магнітні елементи 1, 2, 3, 4, окрім указаних вище магнітних сил F1, F2, F3, F4, F5, F6, співвідношення між якими не порушується (рівність швидкостей обертання коліс зберігається), впливає тільки сила інерції Fи (див. фіг. 2). Тому рівноважний стан рухливого магнітного елемента 1 переміщується на дільницю а1 в точку, де F1=-(F2+Fи). Указана рівність сил, впливаючих на елемент 1, досягається при цьому за рахунок того, що у загальному випадку величина 1-ої магнітної сили F1 обернено пропорцій на квадрату віддалення між полюсом електромагніту і р ухливим магнітним елементом, на котрий ця сила діє. Через аналогічні причини рухливий магнітний елемент 2 зміщується на дільницю а2, де F3=-(F4+Fи), магнітний елемент 4 - на дільницю b4, де F6=-Fи, а магнітний елемент 3 під дією сили (F5+Fи) як і раніше зміщений до механічного упору на дільницю а3. При цьому у результаті перетворення місця знаходження рухли вих магнітних елементів 1, 2, 3, 4 у двоїчні логічні сигнали маємо: а1=1, b1=0, с1=0; а2=1, b2=0, с2=0; а3=1, b3=0, с3=0; а4=0, b4=1, с4=0. Отже, режим 2 можна декодувати за допомогою реалізації функції логічного множення перемінних а1, а2, а3, b4. Y2=а1·а2·а3·b4. (2) Таким чином, при Y2=1 КТЗ р ухається прискорено без юзу і буксування, а при Y2=0 має місце інший режим руху. Режим 3. Сповільнений рух КТЗ без юзу та буксування відрізняється від режиму 2 тільки знаком прискорення (напрямком дії сили інерції Fи, див. фіг. 3). Рівність швидкостей обертання ведучих та ведених коліс транспорту в цьому режимі підтримує попереднє взаємне співвідношення між магнітними силами F1, F2, F3, F4, F5, F6 на ідентичних відстанях від полюсу відповідного електромагніту до рухливого магнітного елемента. Тому рухливі магнітні елементи 1, 2, 3 фіксуються на дільницях шляху с1, с2, b3 відповідно, де їх рівноважні становища досягаються за рахунок рівності слідуючи х сил: (F1+Fи)=-F2, (F3+Fи)=-F4, Fи=-F5. Одночасно з цим рухливий магнітний елемент 4 під дією сили (F6+Fи) переміщується на дільницю шляху с4 до механічного упору із корпусом датчика. Тоді у результаті перетворення місця знаходження магнітних елементів 1, 2, 3, 4 у двоїчні логічні сигнали маємо: а1=0, b1=0, с1=1; а2=0, b2=0, с2=1; а3=0, b3=1, с3=0; а4=0, b4=0, с4=1. Таким чином, режим сповільненого руху КТЗ без буксування та юзу може бути ідентифікованим за допомогою виконання операції логічного множення двоїчних сигналів с1, с2, b3, с4: Y3=с1·с2·b3·с4. (3) При Y3=1 має місце рух КТЗ у режимі 3, а при Y3=0 - реалізується інший режим його руху. Режим 4. При русі КТЗ із буксуванням у відсутності прискорення, або сповільнення швидкість обертання буксуючих ведучи х коліс перевищує швидкість обертання ведених коліс, внаслідок чого у точках рівного віддалення рухливи х магнітних елементів від полюсів електромагнітів 5, 6 і 6, 7 відповідно має місце нерівність модулів магнітних сил ІF2І>IF1І и ІF3І>ІF4І. Тому рухливий магнітний елемент 1 зміщується на дільницю а1, більш віддалену від електромагніту 6 і більш близьку до електромагніту 5, а р ухливий магнітний елемент 2 - на дільницю с2, віддалену від електромагніту 6 і більш близьку до електромагніту 7 (див. фіг. 4). В результаті такого переміщення магнітні елементи 1 і 2 фіксуються на указаних дільницях, де спостерігається рівновага слідуючих магнітних сил: на дільниці а1 (F1=-F2) і на дільниці с2 (F3=-F4). Одно 3 29824 часно з цим під впливом магнітних сил F5 і F6 рухливі магнітні елементи 3 i 4 переміщуються на дільниці а3 і с4 відповідно. Після перетворення місця знаходження рухливи х магнітних елементів 1, 2, 3, 4 у двоїчні логічні сигнали маємо: а1=1, b1=0, с1=0; а2=0, b2=0, с2=1; а3=1, b3=0, с3=0; а4=0, b4=0, с4=1; і розпізнавання цього режиму руху КTC може бути виконано шляхом реалізації логічного множення двоїчних сигналів а1, с2, а3, с4: Y4=а1·с2·а3·с4. (4) Таким чином, при Y4=1 КТЗ р ухається із буксуванням при відсутності прискорення, або сповільнення (режим 4), а при Y4=0 має місце інший режим руху. Режим 5. Рух КТЗ із боксованням при наявності прискорення відрізняється від попереднього режиму тим, що на рухливі магнітні елементи 1, 2, 3, 4 окрім магнітних сил F1, F2, F3, F4, F5, F6, що формуються як і раніше в умовах перевищення швидкості ведучих буксуючи х коліс над швидкістю обертання ведених коліс, діє також сила інерції Fи (див. фіг. 5). При цьому рухливі магнітні елементи 2 і 4 переміщуються відповідно на дільниці b2 і b4, а елементи 1 и 3 зостаються фіксованими на дільницях а1 і а3 відповідно. При цьому фіксація рухомих магнітних елементів 1, 2 і 4 на указаних дільницях шляху обумовлена досягненням рівності нулю алгебраїчної суми сил, впливаючих на ці елементи в точках, приналежних тим дільницям, де F1=-(F2+Fи), F3=-(F4+Fи) і F6=-Fи відповідно. В той же час рухливий магнітний елемент 3 фіксується на дільниці шляху а3 за рахунок впливу суми сил (F5+Fи), спрямованих у напрямку дільниці а3. В результаті маємо: а1=1, b1=0, с1=0; а2=0, b2=1, с2=0; а3=1, b3=0, с3=0; а4=0, b4=1, с4=0. Отже, режим 5 може бути декодованим завдяки реалізації операції множення двоїчних сигналів а1, b2, а3, b4: Y5=а1·b2·а3·b4. (5) При Y5=1 має місце рух КТЗ із боксованням при наявності прискорення, а при Y5=0 має місце інший режим руху КТЗ. Режим 6. Рух КТЗ із буксуванням при наявності сповільнення відрізняється від попереднього режиму 5 тим, що змінюється на протилежне спрямування дія сили інерції, впливаючої на рухливі магнітні елементи 1, 2, 3, 4 (фіг. 6). Магнітні сили F1, F2, F3, F4, F5, F6 формуються при цьому в умовах, коли швидкість обертання буксуючи х ведучи х коліс перевищує швидкість обертання ведених коліс КТЗ. Внаслідок цього магнітні елементи 1, 2, 3 фіксуються на дільницях шляху b1, с2, b3 відповідно в точках, де має місце слідуюча рівність сил: (F1+Fи)=-F2, (F3+Fи)=-F4, Fи=-F5. Одночасно із цим під дією суми сил (F6+Fи) рухливий магнітний елемент 4 переміщується на дільницю с4. В результаті перетворення місця знаходження рухливих магнітних елементів 1, 2, 3, 4 в двоїчні логічні сигнали маємо: а1=0, b1=1, с1=0; а2=0, b2=0, с2=1; а3=0, b3=1, с3=0; а4=0, b4=0, с4=1. Із цього витікає, що логічне множення двоїчних сигналів b1, с2, a3, с4 дозволяє декодувати рух КТЗ у режимі 6. Y6=b1·с2·b3·с4. (6) При Y6=1 має місце рух КТЗ із боксованням при наявності сповільнення (режим 6), а при Y6=0 має місце інший режим руху. Режим 7. Цей режим відповідає руху КТЗ із сповільненням при наявності юзу з одночасним блокуванням (зупинкою) ведучих і ведених коліс. В цьому випадку магнітні сили, створювані електромагнітами 5, 6, 7, рівні нулю F1=F2=F3=F4=F5= =F6=0 і на рухливі магнітні елементи 1, 2, 3, 4 впливає тільки сила інерції Fи, внаслідок чого вони фіксуються на дільницях с1, с2, с3, с4 (див. фіг. 7). Таким чином, в режимі 7 маємо: а1=0, b1=0, с1=1; а2=0, b2=0, с2=1; а3=0, b3=0, с3=1; а4=0, b4=0, с4=1. Тоді реалізація логічної функції: Y7=с1·с2·с3·с4, (7) дозволяє декодувати режим руху КТЗ із сповільненням при наявності юзу з блокуванням ведучих і ведених коліс (режим Т): при Y7=1 має місце рух КТЗ у режимі 7, а при Y7=0 КТЗ р ухається в іншому режимі. Режим 8. Рух КТЗ з юзом при блокуванні тільки ведучих коліс та сповільненні транспорту створює умови, при яких магнітні сили, що формуються пропорційними швидкості обертання ведучих коліс стають рівними нулю F2=0, F3=0 і на рухливі магнітні елементи 1, 2, 3, 4 діє сила інерції Fи і магнітні сили F1, F4, F5, F6, пропорційні швидкості обертання ведених коліс. Під дією указаних сил рухливі магнітні елементи 1, 2, 3, 4 фіксуються на дільницях шляху с1, b2, b3, с4 відповідно (див. фіг. 8). При цьому в результаті перетворення місця знаходження рухли вих магнітних елементів 1, 2, 3, 4 в двоїчні логічні сигнали маємо: а1=0, b1=0, с1=1; а2=0, b2=1, с2=0; а3=0, b3=1, с3=0; а4=0, b4=0, с4=1. Логічне множення двоїчних сигналів с1, b2, b3, с4 дозволяє декодувати режим 8 руху КТЗ: Y8=с1·b2·b3·с4. (8) При Y8=1 КТЗ рухається у режимі 8 із юзом при блокуванні ведучих коліс і сповільненні транспорту, а при Y8=0 має місце інший режим руху. Режим 9. При русі КТЗ із юзом при блокуванні ведених коліс і сповільненні транспорту стають рівними нулю магнітні сили F1, F4, F5, F6, величина яких пропорційна швидкості обертання ведених коліс (F4=0, F4=0, F5=0, F6=0). Рухливі магнітні елементи 1, 2, 3, 4 під дією сили інерції Fи і магнітних сил F2, F3, пропорційних швидкості обертання ведучи х коліс, фіксуються на дільницях шляху b1, с2, с3, с4 (див. фіг. 9), в результаті чого маємо слідуючі значення двоїчних логічних перемінних: а1=0, b1=1, с1=0; а2=0, b2=0, с2=1; а3=0, b3=0, с3=1; а4=0, b4=0, с4=1. Таким чином, шляхом реалізації функції логічного множення двоїчних сигналів b1, с2, с3, с4: Y9=b1·с2·с3·с4, (9) може бути декодованим розглядавши режим 9 руху КТЗ із юзом при блокуванні ведених коліс і сповільненню транспорту: при Y9=1 КТЗ рухається в режимі 9, а при Y9=0 транспортний засіб знаходиться в іншому режимі руху. Аналіз представлених ви ще матеріалів показує, що, в будь якому із контрольованих режимів руху при реалізації пропонуємого способу виконують операції реєстрації місця знаходження рухливих магнітних елементів 1, 2, 3, 4 на виділених ді 4 29824 льницях шляху S і перетворення результатів указаної реєстрації у двоїчні логічні сигнали контактним, або безконтактним методом. Для кращої наочності розглянемо здійснення указаних операцій реєстрації і перетворення на прикладі контактного методу їх реалізації. На фіг. 10 показана, наприклад, ситуація, коли у процесі реалізації способу рухливий магнітний елемент 1 був зафіксований на дільниці b1. При цьому, як видно із малюнка, тіло рухливо го магнітного елемента 1 замикає контакти 9, 12, внаслідок чого в замкненому електричному ланцюгу [шина +Е джерела, електричний контакт 9, рухливий елемент 1, електричний контакт 12, резистор Rb, шина "земля" джерела] починає протікати струм і на виході "В1" формується високий рівень потенціалу, рівний величині падіння напруги на резисторі Rb. Указаний рівень потенціалу відповідає рівню логічної "одиниці". В той же час на дільницях шля ху а1 і с1 контакти 8, 11 і 10, 13 виявляються розімкненими, за рахунок чого на вихода х А1, С1 формується потенціал, рівний потенціалу "землі", що відповідає в даному випадку формуванню на указаних виходах "нульового" логічного сигналу. Отож, фіг. 10 представляє ситуацію, в якій логічні сигнали a1, b1, c1, сформовані на виходах А1, В1, С1 схеми у результаті реєстрації і перетворення місця знаходження магнітного елемента 1, мають значення: а1=0, b1=1, с1=0. Аналогічно здійснюється процедура реєстрації і перетворення місця знаходження рухливи х магнітних елементів 2, 3, 4 (на фіг. 10 не показані) у двоїчні логічні сигнали. Із представленого вище опису винаходу витікає, що для його реалізації необхідно, щоб магнітні сили, створювані електромагнітами, були пропорційними швидкості обертання ведучих (ведених) коліс. Зокрема, в вимірювальній системі фіг. 1 фіг. 9, ілюстр уючій пропонуємий спосіб, магнітні сили F1, F4, F5, F6, повинні бути пропорційними швидкості обертання ведених коліс в той час, як величина магнітних сил F2, F3 повинна формуватися пропорційною швидкості обертання ведучих коліс КТЗ. Один із найпростіших варіантів вирішення цієї задачі може бути отриманий при використанні електронних, або електромеханічних тахогенераторів в якості первісних перетворювачів числа обертів ведучи х і ведених коліс відповідно у пропорційну їм величину напруги на виході тахогенераторів. Тоді при підключенні обмоток певного електромагніту до виходу відповідного тахогенератора, створювана цим електромагнітом сила дії на рухливий магнітний елемент буде пропорційною швидкості обертання ведучих (ведених) коліс транспортного засобу. Для досягнення високої ефективності при реалізації винаходу необхідно враховувати слідуючі його особливості. У процесі розпізнавання режимів руху КТЗ із боксованням чутливість вимірювальної системи, реалізуючої пропонуємий спосіб, може бути підви щена в тому випадку, коли магнітні сили, створюємі електромагнітами в функції від швидкості обертання ведучих коліс, формують пропорційними швидкості обертання того ведучого колеса, чия швидкість у даний момент є найбільшою. Пристосовано до вимірювальних систем, представле них на фіг. 1, фіг. 2. ..., фіг. 9, це може бути описано співвідношеннями: F2=k·max {V1б, V2б, ..., Vnб} (10) F3=k·max {V1б, V2б, ..., Vnб}, (11) де: k - коефіцієнт пропорційності; V1б, V2б, ..., Vnб - швидкість обертання буксуючих коліс КТЗ. В той же час при визначенні "передюзових" режимів руху КТЗ відповідні j-ті магнітні сили Fj доцільно формувати пропорційними мінімальній швидкості обертання коліс із числа коліс, перебуваючих у передюзовому стані (пропорційними швидкості обертання найбільш загальмованого колеса). Тобто у цьому випадку доцільно мати: Fj=k·min {V1ю, V2ю, ..., Vnю}, (12) де: k - коефіцієнт пропорційності; V1ю, V2ю, ..., Vnю - швидкості обертання коліс КТЗ, величина яких близька до критичної під час гальмування. Друга особливість полягає в тому, що для ефективної реалізації винаходу виділені в вимірювальній системі дільниці шляху а1, b1, с1; а2, b2, с2; а3, b3, с3; а4, b4, с4 повинні підтримуватися у горизонтальному положенні на похильних ділянках дороги, або виникаючі на указаних ділянках дороги додаткові впливи на рухливі магнітні елементи повинні компенсуватися, наприклад, введенням підмагнічування, пропорційного куту схилу дороги. Слідуюча особливість пропонуємого способу полягає у тому, що для зменшення коливань магнітних елементів відносно положення їх рівноваги при різкій зміні режимів руху транспорту в обшир, де переміщуються рухливі магнітні елементи може бути введена демпфіруюча рідина. Ще одна особливість пропонуємого способу полягає у тому, що коли для системи контролю та керування режимом руху КТЗ не потрібна інформація про всі різноманітні режими руху, а потрібна більш стисла інформація, то таке стиснення інформації може бути зроблено шляхом перетворення логічних співвідношень, получених при докладному аналізі режимів руху КТЗ. Доведемо це на прикладі стиснення інформації відносно дев'яти режимів руху, описаннях вище для випадку, в якому про указані дев'ять режимів потрібна стисла (більш компактна) інформація тільки про наявність (відсутність) юзу, або боксовання при русі КТЗ. Тоді шляхом об'єднання співвідношень (1), (2), (3) для розпізнавання режиму руху без юзу та боксовання може бути получено співвідношення слідуючого виду: Yн=b1·b2·а3·с4+а1·а2·а3·b4+с1·с2·b3·с4. (13) Таким чином, при Yн=1 транспортний засіб рухається без юзу та буксування (нормальний режим руху), а при Yн=0 має місце юз або (та) буксування під час руху КТЗ. Об'єднуючи аналогічно співвідношення (4), (5), (6) та (7), (8), (9) получаємо логічні співвідношення для декодування режимів руху при наявності боксовання Yб, а також для режимів руху із юзом Yю відповідно. Де: Yб=a1·c2·а3·с4+а1·b2·а3·b4+b1·с2·b3·с4 (14) Yю=c1·c2·c3·с4+c1·b2·b3·c4+b1·с2·c3·с4. (15) Отже, ситуація, при якій Yн=0, Yб=1, Yю=0 відповідає руху транспортного засобу при наявності буксування, а при Yн=0, Yб=0, Yю=1 має місце рух КТЗ із юзом. Відзначимо також, що у розглянутому вище випадку стиснення інформації про режими руху достатньо визначити будь які дві із трьох фу 5 29824 нкцій Yн, Yб, Yю (наприклад, Yб, Yю) для того, щоб внести ясність не тільки в питання чи має місце юз, або буксування при русі КТЗ, але й визначити яке саме відхилення від нормального режиму руху має місце у даному випадку. Нарешті, подальшою особливістю здійснення винаходу є те, що при зменшенні числа необхідних для визначення режимів руху КТЗ, вимірювальна система, реалізуюча спосіб, може бути значно спрощена. На фіг. 11 показана вимірювальна система, в котрій у порівнянні із вимірювальною системою, представленою на фіг. 1, фіг. 2, ..., фіг. 9, виключені слідуючі її елементи: рухливі магнітні елементи 3 і 4, а також дільниці шляху (а3, b3, с3), та (а4, b4, с4). При цьому вимірювальна система фіг. 11 стає менш складною і, разом з цим, після указаного її спрощення вона забезпечує розпізнавання п'яти із дев'яти описаних вище режимів руху КТЗ: режим 1, режим 2, режим 4, режим 5, режим 8. Двоїчні логічні сигнали у вимірювальній системі фіг. 11 формують на основі реєстрації та послідуючого перетворення місця знаходження рухливих магнітних елементів 1 і 2 на дільницях шляху (a1, b1, c1), та (а2, b2, с2). При цьому рівняння, які реалізуються під час декодування указаних вище режимів руху КТЗ, мають вигляд: Y1'=b1·b2 (16) Y2'=а1·а2 (17) Y4'=а1·с2 (18) Y5'=а1·b2 (19) Y8'=с1·b2. (20) Тоді при використанні вимірювальної системи фіг. 11 для визначення режимів руху КТЗ у відповідності із пропонуємим способом розпізнавання указаних режимів здійснюють по значенням двоїчних логічних функцій Y1', Y2', Y4', Y5', Y8' таким чином: Y1'=1, Y2'=Y4'=Y5'=Y8'=0 відповідає режиму 1; Y2'=1, Y1'=Y4'=Y5'=Y8'=0 відповідає режиму 2; Y4'=1, Y1'=Y2'=Y5'=Y8'=0 відповідає режиму 4; Y5'=1, Y1'=Y2'=Y4'=Y8'=0 відповідає режиму 5; Y8'=1, Y1'=Y2'=Y4'=Y5'=0 відповідає режиму 8. Необхідно підкреслити, що наведені вище приклади реалізації винаходу не розкривають у повному обсязі можливостей пропонуємого способу по визначенню різноманітних режимів руху колісного транспортного засобу. Доста тньо вказати, наприклад, на те, що в вимірювальній системі приведеній на кресленнях фіг. 1, фіг. 2, ..., фіг. 9, можна реалізувати у принципі 81 варіант різноманітного взаємного розташування рухливих магнітних елементів 1, 2, 3, 4 на дільницях шляху (а1, b1, с1), (а2, b2, с2), (а3, b3, с3), (а4, b4, с4), котрі можуть бути після цього перетворені у відповідності із пропонуємим способом у 81 варіант двоїчних кодових комбінацій та використані для розпізнавання і характеризації як описаних вище дев'яти режимів руху транспортного засобу, так і інших режимів його руху. Поряд з цим необхідно вказати, також на те, що описані вище варіанти модифікації вимірювальної системи, реалізуючої пропонуємий спосіб, не є єдино можливими. Так, у залежності від конкретних особливостей вирішуємої задачі по визначенню режимів руху КТЗ в вимірювальній системі що реалізує спосіб, може бути збільшено (зменшено) число виділених дільниць шляху, кількість електромагнітів і число рухливи х магнітних елементів, використано взаємно перпендикулярне розташування виділених дільниць шляху, і, таким чином, конфігурація вимірювальної системи та апаратурні витрати на її виготовлення можуть приводитися цілеспрямовано у відповідність із ступенем складності указаної задачі. В цьому сенсі пропонуємий винахід дає унікальний засіб для визначення та характеризації наперед заданого числа різноманітних режимів руху КТЗ. На завершення необхідно відзначити, що у формулі винаходу і в його описі терміни "ведучі" і "ведені" колеса КТЗ використані нами умовно для того, щоб виділити групи коліс, які функціонують у відрізняючихся умовах. Тому в тому разі, коли, наприклад, усі колеса КТЗ є ведучими, указані терміни повинні бути адресованими до різних гр уп ведучи х коліс, наприклад, до передніх та до задніх ведучи х коліс відповідно. Із приведених вище матеріалів видно, що задача винаходу - розширення функціональних можливостей способу по ідентифікації різноманітних режимів руху КТЗ із одночасним підвищенням надійності та достовірності їх реєстрації, здійснена у повному обсязі. Дійсно, при реалізації винаходу немає у принципі завад на збільшення числа де кодуємих режимів руху КТЗ і без будь-яких перешкод число надійно розпізнаваємих автоматично режимів руху може бути збільшено у порівнянні з їх числом за способом-прототипом на порядок величини і більше. При цьому без використання складних перетворювальних пристроїв інформація про режим руху транспортного засобу відображається у вигляді двоїчних цифрови х кодів, формуємих за рахунок фіксації рухливи х магнітних елементів на виділених дільницях шля ху у полі дії сил, пропорційних прискоренню (сповільненню) КТЗ, швидкості обертання ведучих і ведених коліс, а також розрізненню швидкостей обертання певних груп коліс або окремих коліс транспортного засобу. Це підвищує надійність та достовірність процесу реєстрації режимів руху КТЗ. Одночасно із цим інформація про режими руху транспортного засобу може бути приведена в двоїчній цифровій формі як в стисненому (компактному) вигляді, так і в розширеному (більш детальному) вигляді практично без збільшення апаратурних витрат. Істотна відмінність даного об'єкту винаходу від раніш відомих полягає у тому, що пропонуємий спосіб забезпечує формування вимірювальної інформації по визначенню режимів руху КТЗ на основі системи параметрів, в котру входять: прискорення (сповільнення) КТЗ, швидкість обертання його ведучих і ведених коліс, а також величина розрізнення швидкостей обертання ведучих і ведених коліс транспортного засобу або (та) розрізнення швидкостей обертання окремих коліс КТЗ із числа його ведучих (ведених) коліс. При цьому істотна відмінність пропонуємого способу створюється не тільки застосуванням системи указаних параметрів, як і не застосовувалися раніше у сукупності, але перш за все тим, що вимірювальну систему у відповідності із винаходом будують таким чином, що вона реагує на указану систему параметрів, виключаючи при цьому їх безпосередню реєстрацію і послідуючу обробку, а також тим, що в указаній системі перетворення результатів розпізнавання режимів руху КТЗ у двоїчні цифрові ко 6 29824 ди здійснюється фактично без включення в систему аналого-цифрових перетворювачів інформації, тому що сама по собі фіксація рухливи х магнітних елементів на виділених дільницях шляху згідно із винаходом відповідає формуванню двоїчних цифрових кодів, створюючих основу для декодування режимів руху КТЗ. Ні один із відомих способів не має таких властивостей. Працездатність і ефективність пропонуємого способу була підтверджена при його випробуванні на основі вимірювальної системи, розробленої і побудованої нами пристосовано до визначення режимів руху пасажирського міського трамваю. Головні переваги даного об'єкту винаходу порівняно з відомим по прототипу полягають у слідуючому: 1. Розширюються функціональні можливості по автоматичній ідентифікації режимів руху КТЗ: число надійно розпізнаваних режимів руху зростає на порядок величини і більше у порівнянні із способом-прототипом. 2. Підвищуються надійність та достовірність декодування режимів руху за рахунок представ лення інформації про них в цифровій формі не внаслідок виконання проміжних аналого-цифрових перетворень, а внаслідок того, що указана інформація формується у цифровому вигляді природним шляхом за рахунок фіксації рухливи х магнітних елементів на виділених дільницях шляху в полі дії сил, пропорцій них прискоренню (сповільненню) КТЗ, швидкості обертання коліс транс порту та величині розрізнення швидкостей обертання окремих його коліс або (та) певних груп коліс транспортного засобу. 3. Складність вимірювальної системи, реалізуючої спосіб, може бути зменшена при зменшенні числа контрольованих режимів руху КТЗ без зниження надійності і достовірності їх розпізнавання, а інформація про режими руху може бути представлена в цифровій формі як в стисненому, так і в розширеному вигляді, що спрощу об'єднання із цифровими системами керування і контролю та розвантажує указані системи від надлишкової інформації. Фіг. 1 Фіг. 2 Фіг. 3 7 29824 Фіг. 4 Фіг. 5 Фіг. 6 Фіг. 7 8 29824 Фіг. 8 Фіг. 9 Фіг. 10 Фіг. 11 9 29824 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 35 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 10
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of determining mode of motion of wheel transportation means
Автори англійськоюBobrovska Natalia Hennadiivna, Bobrovskyi Henadii Oleksandrovych
Назва патенту російськоюСпособ определения режима движения колесного транспортного средства
Автори російськоюБобровская Наталья Геннадиевна, Бобровский Геннадий Александрович
МПК / Мітки
МПК: G01P 3/02, B61C 15/00
Мітки: визначення, руху, режиму, спосіб, транспортного, колісного, засобу
Код посилання
<a href="https://ua.patents.su/10-29824-sposib-viznachennya-rezhimu-rukhu-kolisnogo-transportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення режиму руху колісного транспортного засобу</a>
Пристрій для визначення сили опору руху транспортного засобу на плаву
Номер патенту: 15660
Опубліковано: 30.06.1997
Автори: Трушкін Віктор Миколайович, Єпіфанов Віталій Валерійович
МПК: G01M 17/00
Мітки: визначення, руху, плаву, засобу, транспортного, пристрій, сили, опору
Формула / Реферат:
(57) Устройство для определения силы со противления движению транспортного средства на плаву, содержащее буксирный трос и динамометр, закрепленный с одной стороны к буксирному тросу, а с противоположной к корпусу транспортного средства, отличающееся тем, что в кормовой части корпуса транспортного средства закреплен бак с управляемым сливным клапаном, а на баке закреплен насос, выходной канал которого сообщен с баком, а входной - с...
Залежна підвіска колісного транспортного засобу
Номер патенту: 9804
Опубліковано: 30.09.1996
Автори: Глушко Борис Петрович, Мудрак Валентин Дмитрович
МПК: B60G 9/00
Мітки: залежна, колісного, засобу, підвіска, транспортного
Формула / Реферат:
(57) 1. Зависимая подвеска колесного транспортного средства, содержащая балку, направляющее устройство и связанный с ним гидроамортизатор, нижние и верхние опорные чашки, первые из которых жестко закреплены на балке, а вторые - на кузове транспортного средства, упругие элементы, размещенные между опорными чашками, упоры для ограничения сжатия упругих элементов, отличающаяся тем, что она снабжена поддерживающим кронштейном, шарнирно...
Спосіб керування напрямком руху транспортного засобу сільськогосподарського призначення та пристрій для його здійснення
Номер патенту: 28364
Опубліковано: 16.10.2000
Автор: Надикто Володимир Трохимович
МПК: A01B 59/00, A01B 69/00
Мітки: транспортного, спосіб, напрямком, сільськогосподарського, керування, призначення, здійснення, руху, засобу, пристрій
Формула / Реферат:
1. Способ управления направлением движения транспортного средства сельскохозяйственного назначения, состоящего из трактора с передними управляющими колесами и одноосного прицепа, поворотный кронштейн которого оборудован вертикальным шарниром с механизмом его блокировки в виде гидроцилиндра двухстороннего действия, заключающийся в дискретной подаче управляющего воздействия на вход механизма блокировки вертикального шарнира прицепа при...
Установка для регулювання температурного режиму повітря, яке подається до кабіни транспортного засобу
Номер патенту: 26541
Опубліковано: 11.10.1999
Автори: Нода Олександр Олексійович, Сенькин Володимир Сергійович, Малахов Віктор Миколайович, Межуїв Микола Миколайович, Свириденко Микола Федорович, Яблуновський Олександр Терентієвич, Бондар Михайло Анатолійович, Олексіїв Юрій Сергійович
МПК: B60H 1/00
Мітки: установка, засобу, повітря, режиму, регулювання, транспортного, кабіни, подається, температурного, яке
Формула / Реферат:
1. Установка для регулирования температурного режима воздуха, подаваемого в кабину транспортного средства, содержащая теплообменник типа воздух - воздух, каждый контур которого выполнен с отдельным источником воздуха в виде компрессора, и вихревую трубу, которая подсоединена к выходу одного из контуров теплообменника, отличающаяся тем, что контур теплообменника, не связанный с вихревой трубой, выполнен замкнутым через двухпозиционный...
Спосіб виготовлення сходового рамного вузла для моторного транспортного засобу та балковий рамний вузол для моторного транспортного засобу

Номер патенту: 28078
Опубліковано: 16.10.2000
Автори: Хортон Френк А., Джекобс Кеннет Б., Мейо Говард А. ІІІ
МПК: B62D 21/00, B21D 53/00
Мітки: спосіб, транспортного, моторного, засобу, вузла, рамний, рамного, сходового, балковий, вузол, виготовлення
Текст:
...прокаткой и гибкой U-образные центральные лонжероны. В соответствии с доктринами настоящего изобретения каждый из передних лонжеронов образуют посредством 1) помещения металлического трубчатого элемента в полость пресс-формы, причем пресс-форма имеет внутреннюю поверхность, задающую геометрию полости, и 2) подачи жидкости внутрь металлического трубчатого элемента с достаточным давлением для того, чтобы расширить трубчатый элемент...
Попередній патент: Спосіб керування швидкістю шпінделя
Наступний патент: Сальник колонки водорозбірної
Випадковий патент: Повітряна лінія електропередачі