Система розвантаження силових гіроскопів космічного апаратa
Номер патенту: 4604
Опубліковано: 17.01.2005
Автори: Болдовська Олена Олександрівна, Бандура Іван Миколайович, Болдовська Наталія Олександрівна
Формула / Реферат
Система розвантаження силових гіроскопів космічного апарата, що містить вимірювачі абсолютної кутової швидкості, кінетичного моменту силового гіроскопічного комплексу, а також блок визначення сумарного кінетичного моменту космічного апарата і блок обчислення сигналу розвантаження, причому вихід вимірювача абсолютної кутової швидкості з'єднаний з першим входом блока визначення сумарного кінетичного моменту космічного апарата, вихід вимірювача кінетичного моменту силового гіроскопічного комплексу підключений до другого входу блока визначення сумарного кінетичного моменту, вихід якого з'єднаний з блоком обчислення сигналу розвантаження, яка відрізняється тим, що до її складу введені сонячні батареї, вимірювач напряму на Сонце, датчик положення сонячних батарей відносно апарата, блок обчислення положення сонячних батарей відносно Сонця та привід сонячних батарей, виходи з вимірювача напряму на Сонце і датчика положення сонячних батарей з'єднані з входом блока обчислення положення сонячних батарей, виходи блока визначення сумарного кінетичного моменту і блока обчислення положення сонячних батарей з'єднанні з входом блока обчислення сигналу розвантаження, вихід якого з'єднаний з приводом сонячних батарей, вихід якого, в свою чергу, з'єднаний з входом сонячної батареї.
Текст
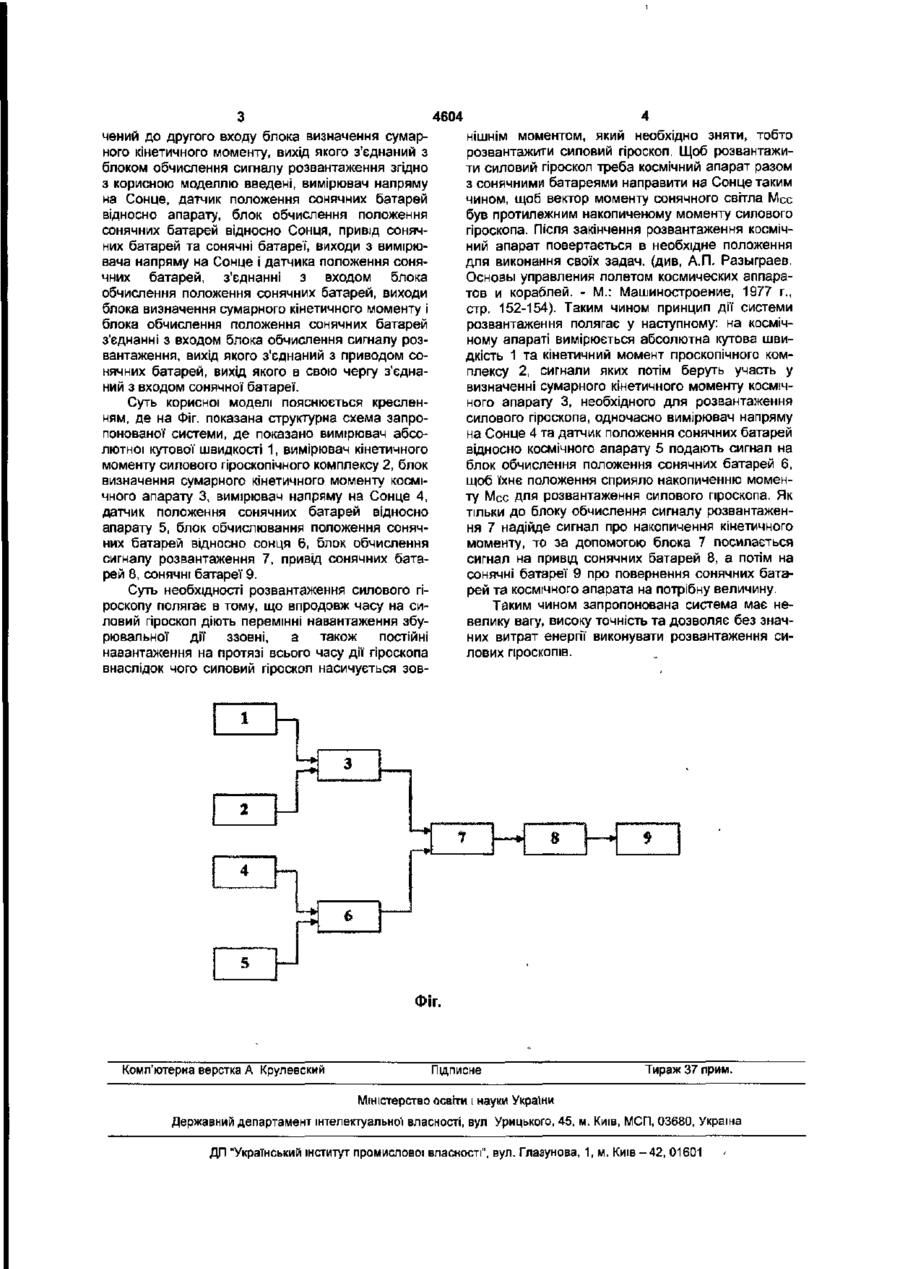
Система розвантаження силових гіроскопів космічного апарата, що містить вимірювачі абсолютної кутової швидкості, кінетичного моменту силового гіроскопічного комплексу, а також блок визначення сумарного кінетичного моменту космічного апарата і блок обчислення сигналу розвантаження, причому вихід вимірювача абсолютної кутової швидкості з'єднаний з першим входом блока визначення сумарного кінетичного моменту ко смічного апарата, вихід вимірювача кінетичного моменту силового гіроскопічного комплексу підключений до другого входу блока визначення сумарного кінетичного моменту, вихід якого з'єднаний з блоком обчислення сигналу розвантаження, яка відрізняється тим, що до її складу введені сонячні батареї, вимірювач напряму на Сонце, датчик положення сонячних батарей відносно апарата, блок обчислення положення сонячних батарей відносно Сонця та привід сонячних батарей, виходи з вимірювача напряму на Сонце і датчика положення сонячних батарей з'єднані з входом блока обчислення положення сонячних батарей, виходи блока визначення сумарного кінетичного моменту і блока обчислення положення сонячних батарей з'єднанні з входом блока обчислення сигналу розвантаження, вихід якого з'єднаний з приводом сонячних батарей, вихід якого, в свою чергу, з'єднаний з входом сонячної батареї". Корисна модель відноситься до космічної техніки і може бути використана при проектуванні космічних апаратів для розвантаження силових гіроскопів від навантаження, викликаного тиском сонячних променів на космічний апарат, магнітним навантаженням та атмосферним опором. Відома система розвантаження, яка містить ракетний двигун з газовим соплом, що служить виконавчим органом системи, або двигун - маховик у якому керуючий момент створюється за рахунок зміни кутової швидкості маховика (див. К.Б. Алексеев, Г.Г Бебенин. Управление космическим летательным апаратом. - М.. Машиностроение, 1974 г., ст. 218-230). Недоліками цих систем є великі маса, габарити реактивних сопел і маховиків, а також високе енергоспоживання. Відома система розвантаження силових гіроскопів за допомогою магнітометра і магнітного виконавчого органу, яка взята за прототип (див. К.Б. Алексеев, Г.Г. Бебенин. Управление космическим летательным апаратом, - М.: Машиностроение, 1974 г., ст. 147-167), яка містить в собі вимірювачі абсолютної' кутової' швидкості, кінетичного моменту силового гіроскопічного комплексу, а також блок визначення сумарного кінетичного моменту космічного апарату і блок обчислення сигналу розван таження, причому вихід вимірювача абсолютної кутової швидкості з'єднаний з першим входом блоку визначення сумарного кінетичного моменту космічного апарату, вихід вимірювача кінетичного моменту силового гіроскопічного комплексу підключений до другого входу блока визначення сумарного кінетичного моменту, вихід якого з'єднаний з блоком обчислення сигналу розвантаження. Недоліком такої системи є велика вага такої системи, яку необхідно вивести на орбіту, невисока точність та великі енерговитрати на розвантаження силових гіроскопів Поставлена задача - зменшення ваги системи, підвищення точності та скорочення енерговитрат на розвантаження силових гіроскопів. Ця задача вирішується за допомогою того, що до системи, яка містить вимірювачі абсолютної кутової' швидкості, кінетичного моменту силового гіроскопічного комплексу, а також блок визначення сумарного кінетичного моменту космічного апарату і блок обчислення сигналу розвантаження, причому вихід вимірювача абсолютної кутової' швидкості з'єднаний з першим входом блоку визначення сумарного кінетичного моменту космічного апарату, вихід вимірювача кінетичного моменту силового гіроскопічного комплексу підклю о CD 4604 нішнім моментом, який необхідно зняти, тобто розвантажити силовий гіроскоп. Щоб розвантажити силовий гіроскоп треба космічний апарат разом з сонячними батареями направити на Сонце таким чином, щоб вектор моменту сонячного світла Мес був протилежним накопиченому моменту силового гіроскопа. Після закінчення розвантаження космічний апарат повертається в необхідне положення для виконання своїх задач, (див, А.П. Разыграев. Основы управления полетом космических аппаратов и кораблей. - М.: Машиностроение, 1977 г., стр. 152-154). Таким чином принцип дії системи розвантаження полягає у наступному: на космічному апараті вимірюється абсолютна кутова швидкість 1 та кінетичний момент гіроскопічного комплексу 2, сигнали яких потім беруть участь у визначенні сумарного кінетичного моменту космічного апарату 3, необхідного для розвантаження силового гіроскопа, одночасно вимірювач напряму на Сонце 4 та датчик положення сонячних батарей відносно космічного апарату 5 подають сигнал на блок обчислення положення сонячних батарей 6, щоб їхнє положення сприяло накопиченню моменту Мес для розвантаження силового гіроскопа. Як тільки до блоку обчислення сигналу розвантаження 7 надійде сигнал про накопичення кінетичного моменту, то за допомогою блока 7 посилається сигнал на привід сонячних батарей 8, а потім на сонячні батареї 9 про повернення сонячних батарей та космічного апарата на потрібну величину. чений до другого входу блока визначення сумарного кінетичного моменту, вихід якого з'єднаний з блоком обчислення сигналу розвантаження згідно з корисною моделлю введені, вимірювач напряму на Сонце, датчик положення сонячних батарей відносно апарату, блок обчислення положення сонячних батарей відносно Сонця, привід сонячних батарей та сонячні батареї, виходи з вимірювача напряму на Сонце і датчика положення сонячних батарей, з'єднанні з входом блока обчислення положення сонячних батарей, виходи блока визначення сумарного кінетичного моменту і блока обчислення положення сонячних батарей з'єднанні з входом блока обчислення сигналу розвантаження, вихід якого з'єднаний з приводом сонячних батарей, вихід якого в свою чергу з'єднаний з входом сонячної батареї. Суть корисної моделі пояснюється кресленням, де на Фіг. показана структурна схема запропонованої системи, де показано вимірювач абсолютної кутової швидкості 1, вимірювач кінетичного моменту силового гіроскопічного комплексу 2, блок визначення сумарного кінетичного моменту космічного апарату 3, вимірювач напряму на Сонце 4, датчик положення сонячних батарей відносно апарату 5, блок обчислювання положення сонячних батарей відносно сонця 6, блок обчислення сигналу розвантаження 7, привід сонячних батарей 8, сонячні батареї 9. Суть необхідності розвантаження силового гіроскопу полягає в тому, що впродовж часу на силовий гіроскоп діють перемінні навантаження збурювальної дії ззовні, а також постійні навантаження на протязі всього часу дії гіроскопа внаслідок чого силовий гіроскоп насичується зов Таким чином запропонована система має невелику вагу, високу точність та дозволяє без значних витрат енергії виконувати розвантаження силових гіроскопів. Фіг. Комп'ютерна верстка А Крулевский Підписне Тираж 37 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул. Глазунова, 1, м. Київ-42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of unloading the power gyroscopes of spacecraft
Автори англійськоюBandura Ivan Mykolaiovych
Назва патенту російськоюСистема разгрузки силовых гироскопов космического аппарата
Автори російськоюБандура Иван Николаевич
МПК / Мітки
МПК: B64G 1/24
Мітки: апарата, силових, розвантаження, гіроскопів, система, космічного
Код посилання
<a href="https://ua.patents.su/2-4604-sistema-rozvantazhennya-silovikh-giroskopiv-kosmichnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система розвантаження силових гіроскопів космічного апаратa</a>
Система розвантаження силового гіроскопічного комплексу космічного апаратa
Номер патенту: 64339
Опубліковано: 16.02.2004
Автори: Успенський Валерій Борисович, Кузнєцов Юрій Олексійович, Бандура Іван Миколайович, Голоскоков Євген Григорович
МПК: B64G 1/24
Мітки: силового, апарата, розвантаження, гіроскопічного, система, космічного, комплексу
Формула / Реферат:
Система розвантаження силового гіроскопічного комплексу космічного апарата, в яку входять вимірювач абсолютної кутової швидкості, вимірювач кінетичного моменту силового гіроскопічного комплексу, виходи яких через блок визначення сумарного кінетичного моменту космічного апарата з'єднані з входом блока фіксування допустимого сумарного кінетичного моменту космічного апарата і першим входом блока управління виконавчими органами орієнтації, перший...
Спосіб розвантаження системи силових гіроскопів космічного апарата
Номер патенту: 62147
Опубліковано: 15.12.2003
Автори: Бандура Іван Миколайович, Кузнєцов Юрій Олексійович, Голоскоков Євген Григорович, Успенський Валерій Борисович
МПК: B64G 1/24
Мітки: гіроскопів, апарата, космічного, системі, розвантаження, спосіб, силових
Формула / Реферат:
Спосіб розвантаження системи силових гіроскопів космічного апарата, який полягає в тому, що вимірюють вектор нагромадженого кінетичного моменту системи силових гіроскопів, вимірюють вектор абсолютної кутової швидкості космічного апарата, визначають сумарний вектор кінетичного моменту космічного апарата, виконують розвантаження за допомогою реактивних двигунів орієнтації, який відрізняється тим, що фіксують момент досягнення допустимого...
Електромагнітна система формування керуючих моментів космічного апарата
Номер патенту: 37505
Опубліковано: 15.11.2002
Автори: Салтиков Юрій Дмитрович, Шмідт Ігор Рихардович, Покатаєв Віктор Миколайович, Гладілін Віталій Сергійович, Большакова Іннеса Антонівна, Попов Андрій Анатолійович, Меланченко Олександр Геннадійович, Нікітіна Наталія Павлівна, Ткаліч Віктор Григорович, Дмитрієв Борис Вікторович
МПК: B64G 1/24, G01R 33/038, G01R 33/02
Мітки: апарата, формування, космічного, моментів, керуючих, система, електромагнітна
Формула / Реферат:
1. Електромагнітна система формування керуючих моментів космічного апарата, що включає триосьовий магнітометр, блок сенсорів, що підключений по входу до блока керування системи, три канали керування, що містять електромагнітний виконавчий орган з робочими котушками, які жорстко зв'язані з осями супутника, і блоки формування напруги живлення котушок, які з'єднані з виходами блока керування через аналого-цифровий перетворювач, яка...
Спосіб формування керуючого моменту для космічного апарата
Номер патенту: 65322
Опубліковано: 15.03.2004
Автори: ТРОНЬ ЮРІЙ ОПАНАСОВИЧ, Кузякін Юрій Петрович
МПК: B64G 1/28
Мітки: апарата, моменту, керуючого, спосіб, космічного, формування
Формула / Реферат:
Спосіб формування керуючого моменту для космічного апарата шляхом використання кінетичного моменту, що створюється двигуном-маховиком, який відрізняється тим, що вимірюють кутову швидкість першого електроприводу, отримане значення масштабують, алгебраїчно сумують з сигналом завдання та формують сигнал управління другим електроприводом пропорційно отриманій різниці, вимірюють сигнал другого електроприводу, отримане значення масштабують та...
Пристрій для контролю робочого ресурсу силових статичних конденсаторів
Номер патенту: 35143
Опубліковано: 15.03.2001
Автори: Мокін Борис Іванович, Грабко Володимир Віталійович, Боцула Мирослав Павлович
МПК: G01R 31/12
Мітки: контролю, статичних, силових, конденсаторів, пристрій, ресурсу, робочого
Формула / Реферат:
Пристрій для контролю робочого ресурсу силових статичних конденсаторів, що містить перший масштабуючий підсилювач, аналого-цифровий перетворювач, цифровий суматор, перший регістр, індикатор, який відрізняється тим, що в нього введені датчик напруги, перетворювач змінної напруги в постійну напругу, пристрій вибірки-зберігання, п'ять функціональних перетворювачів, чотири масштабуючих підсилювачі, аналоговий суматор, блок задания ресурсу,...
Попередній патент: Спосіб визначення стану ендометрію при генітальному ендометріозі
Наступний патент: Каністра полімерна
Випадковий патент: Пристрій для відділення пилу з потоку повітря