Система розвантаження силового гіроскопічного комплексу космічного апаратa
Номер патенту: 64339
Опубліковано: 16.02.2004
Автори: Бандура Іван Миколайович, Кузнєцов Юрій Олексійович, Успенський Валерій Борисович, Голоскоков Євген Григорович

Формула / Реферат
Система розвантаження силового гіроскопічного комплексу космічного апарата, в яку входять вимірювач абсолютної кутової швидкості, вимірювач кінетичного моменту силового гіроскопічного комплексу, виходи яких через блок визначення сумарного кінетичного моменту космічного апарата з'єднані з входом блока фіксування допустимого сумарного кінетичного моменту космічного апарата і першим входом блока управління виконавчими органами орієнтації, перший вихід якого зв'язаний з реактивними двигунами орієнтації, яка відрізняється тим, що в неї введені блок визначення напряму сумарного кінетичного моменту космічного апарата, вхід якого під'єднаний до виходу блока фіксування допустимого сумарного кінетичного моменту космічного апарата, блок вибору ефективних реактивних двигунів орієнтації, блок формування параметрів просторового програмного розвороту, вихід якого через другий вхід і другий вихід блока управління виконавчими органами орієнтації з'єднаний з силовим гіроскопічним комплексом, перший вихід блока визначення напряму сумарного кінетичного моменту космічного апарата підключений до входу блока вибору ефективних реактивних двигунів орієнтації, до першого, другого і третього входів блока формування параметрів просторового програмного розвороту під'єднані, відповідно, вихід вимірювача абсолютної кутової швидкості, другий вихід визначення напряму сумарного кінетичного моменту космічного апарата і перший вихід блока вибору ефективних реактивних двигунів орієнтації, другий вихід якого з'єднаний з третім входом блока управління виконавчими органами орієнтації.
Текст
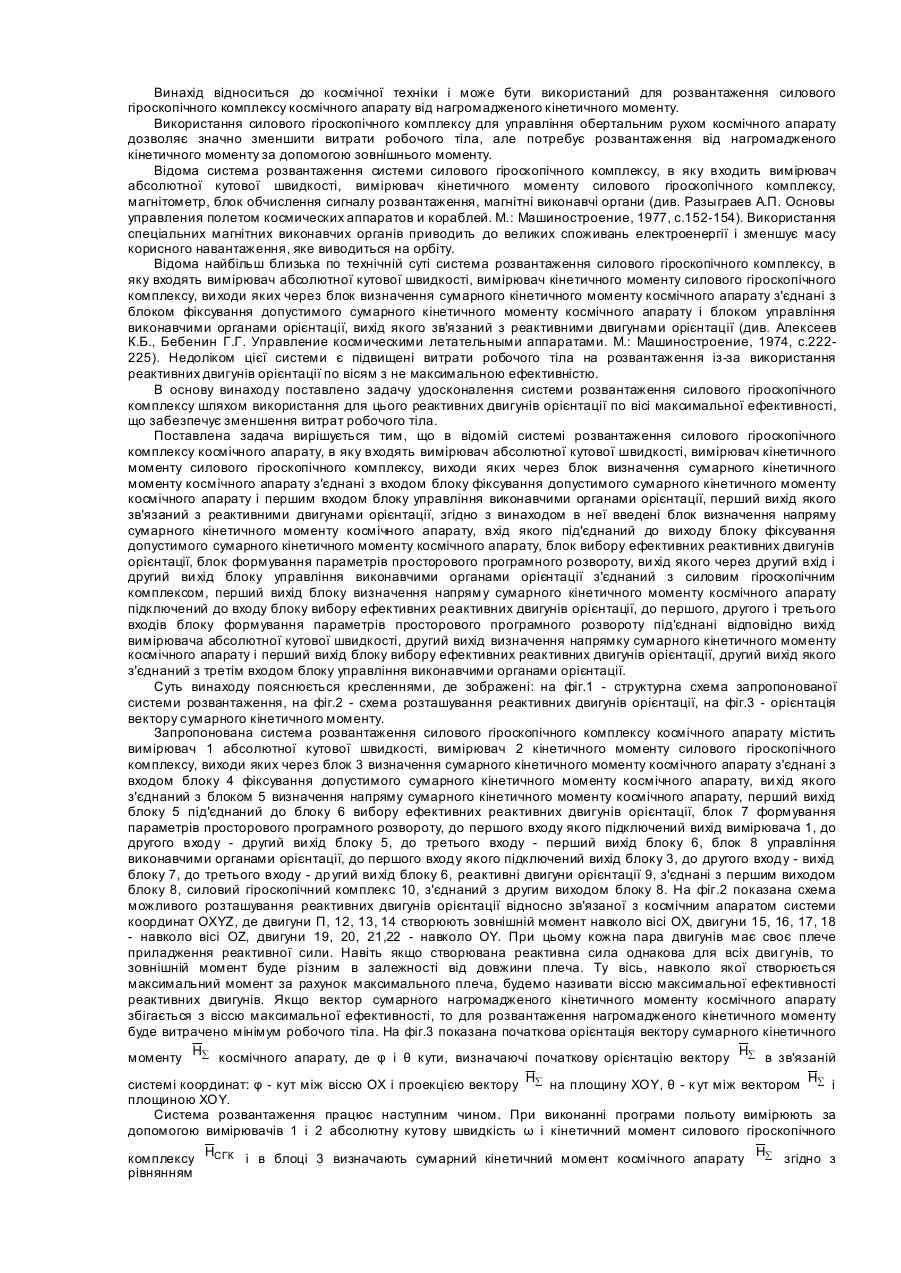
Винахід відноситься до космічної техніки і може бути використаний для розвантаження силового гіроскопічного комплексу космічного апарату від нагромадженого кінетичного моменту. Використання силового гіроскопічного комплексу для управління обертальним рухом космічного апарату дозволяє значно зменшити витрати робочого тіла, але потребує розвантаження від нагромадженого кінетичного моменту за допомогою зовнішнього моменту. Відома система розвантаження системи силового гіроскопічного комплексу, в яку входить вимірювач абсолютної кутової швидкості, вимірювач кінетичного моменту силового гіроскопічного комплексу, магнітометр, блок обчислення сигналу розвантаження, магнітні виконавчі органи (див. Разыграев А.П. Основы управления полетом космических аппаратов и кораблей. М.: Машиностроение, 1977, с.152-154). Використання спеціальних магнітних виконавчих органів приводить до великих споживань електроенергії і зменшує масу корисного навантаження, яке виводиться на орбіту. Відома найбільш близька по технічній суті система розвантаження силового гіроскопічного комплексу, в яку входять вимірювач абсолютної кутової швидкості, вимірювач кінетичного моменту силового гіроскопічного комплексу, ви ходи яких через блок визначення сумарного кінетичного моменту космічного апарату з'єднані з блоком фіксування допустимого сумарного кінетичного моменту космічного апарату і блоком управління виконавчими органами орієнтації, вихід якого зв'язаний з реактивними двигунами орієнтації (див. Алексеев К.Б., Бебенин Г.Г. Управление космическими летательными аппаратами. М.: Машиностроение, 1974, с.222225). Недоліком цієї системи є підвищені витрати робочого тіла на розвантаження із-за використання реактивних двигунів орієнтації по вісям з не максимальною ефективністю. В основу винаходу поставлено задачу удосконалення системи розвантаження силового гіроскопічного комплексу шляхом використання для цього реактивних двигунів орієнтації по вісі максимальної ефективності, що забезпечує зменшення витрат робочого тіла. Поставлена задача вирішується тим, що в відомій системі розвантаження силового гіроскопічного комплексу космічного апарату, в яку входять вимірювач абсолютної кутової швидкості, вимірювач кінетичного моменту силового гіроскопічного комплексу, виходи яких через блок визначення сумарного кінетичного моменту космічного апарату з'єднані з входом блоку фіксування допустимого сумарного кінетичного моменту космічного апарату і першим входом блоку управління виконавчими органами орієнтації, перший вихід якого зв'язаний з реактивними двигунами орієнтації, згідно з винаходом в неї введені блок визначення напряму сумарного кінетичного моменту космічного апарату, вхід якого під'єднаний до виходу блоку фіксування допустимого сумарного кінетичного моменту космічного апарату, блок вибору ефективних реактивних двигунів орієнтації, блок формування параметрів просторового програмного розвороту, ви хід якого через другий вхід і другий ви хід блоку управління виконавчими органами орієнтації з'єднаний з силовим гіроскопічним комплексом, перший вихід блоку визначення напряму сумарного кінетичного моменту космічного апарату підключений до входу блоку вибору ефективних реактивних двигунів орієнтації, до першого, другого і третього входів блоку формування параметрів просторового програмного розвороту під'єднані відповідно вихід вимірювача абсолютної кутової швидкості, другий вихід визначення напрямку сумарного кінетичного моменту космічного апарату і перший вихід блоку вибору ефективних реактивних двигунів орієнтації, другий вихід якого з'єднаний з третім входом блоку управління виконавчими органами орієнтації. Суть винаходу пояснюється кресленнями, де зображені: на фіг.1 - структурна схема запропонованої системи розвантаження, на фіг.2 - схема розташування реактивних двигунів орієнтації, на фіг.3 - орієнтація вектору сумарного кінетичного моменту. Запропонована система розвантаження силового гіроскопічного комплексу космічного апарату містить вимірювач 1 абсолютної кутової швидкості, вимірювач 2 кінетичного моменту силового гіроскопічного комплексу, виходи яких через блок 3 визначення сумарного кінетичного моменту космічного апарату з'єднані з входом блоку 4 фіксування допустимого сумарного кінетичного моменту космічного апарату, ви хід якого з'єднаний з блоком 5 визначення напряму сумарного кінетичного моменту космічного апарату, перший вихід блоку 5 під'єднаний до блоку 6 вибору ефективних реактивних двигунів орієнтації, блок 7 формування параметрів просторового програмного розвороту, до першого входу якого підключений вихід вимірювача 1, до другого входу - другий ви хід блоку 5, до третього входу - перший вихід блоку 6, блок 8 управління виконавчими органами орієнтації, до першого входу якого підключений вихід блоку 3, до другого входу - вихід блоку 7, до третього входу - др угий ви хід блоку 6, реактивні двигуни орієнтації 9, з'єднані з першим виходом блоку 8, силовий гіроскопічний комплекс 10, з'єднаний з другим виходом блоку 8. На фіг.2 показана схема можливого розташування реактивних двигунів орієнтації відносно зв'язаної з космічним апаратом системи координат ΟΧΥΖ, де двигуни П, 12, 13, 14 створюють зовнішній момент навколо вісі ОХ, двигуни 15, 16, 17, 18 - навколо вісі ΟΖ, двигуни 19, 20, 21,22 - навколо ΟΥ. При цьому кожна пара двигунів має своє плече приладження реактивної сили. Навіть якщо створювана реактивна сила однакова для всіх дви гунів, то зовнішній момент буде різним в залежності від довжини плеча. Ту вісь, навколо якої створюється максимальний момент за рахунок максимального плеча, будемо називати віссю максимальної ефективності реактивних двигунів. Якщо вектор сумарного нагромадженого кінетичного моменту космічного апарату збігається з віссю максимальної ефективності, то для розвантаження нагромадженого кінетичного моменту буде витрачено мінімум робочого тіла. На фіг.3 показана початкова орієнтація вектору сумарного кінетичного моменту Hå космічного апарату, де φ і θ кути, визначаючі початкову орієнтацію вектору Hå в зв'язаній системі координат: φ - кут між віссю ОХ і проекцією вектору Hå на площину ΧΟΥ, θ - к ут між вектором Hå і площиною ΧΟΥ. Система розвантаження працює наступним чином. При виконанні програми польоту вимірюють за допомогою вимірювачів 1 і 2 абсолютну кутову швидкість ω і кінетичний момент силового гіроскопічного комплексу HСГК і в блоці 3 визначають сумарний кінетичний момент космічного апарату Hå згідно з рівнянням Hå = Jw + HСГК (1) , де J - матриця моментів інерції космічного апарату. Д Якщо за рахунок дії постійної складової обурюючого моменту Hå досягає допустимого значення H å , то блок 4 фіксує цей момент, а блок 5 визначає напрям Hå , який є початковим кутовим положенням для розвороту космічного апарату. Кінцевим кутовим положенням для забезпечення мінімальних витрат робочого Д тіла для розвантаження нагромадженого кінетичного моменту шля хом збігу вектору H å з віссю максимальної ефективності реактивних двигунів є напрям тієї осі максимальної ефективності, який найбільш Д близький до напряму H å . Вибір кінцевого кутового положення виконується в блоці 6, по початковому і кінцевому кутовим положенням і значенню абсолютної кутової швидкості космічного апарату в блоці 7 формуються параметри і програма просторового програмного розвороту. Відмітимо, що значення сумарного кінетичного моменту космічного апарату менше „насиченого" значення кінетичного моменту на величину, яка дозволяє здійснити програмний розворот космічного апарату. Далі блок 8 підключає силовий гіроскопічний комплекс 10, який забезпечує просторовий програмний розворот космічного апарату в кінцеве положення, Д коли збігаються напрями H å і вісі максимальної ефективності. До цього етапу реалізації винаходу ви трати робочого тіла відсутні, так як реактивні двигуни не використовуються. Після закінчення розвороту блок 8 підключає відповідні ефективні двигуни орієнтації 9, які забезпечують розвантаження до потрібного значення нагромадженого кінетичного моменту з мінімальними витратами робочого тіла. Потім за допомогою силового гіроскопічного комплексу виконується зворотній розворот космічного апарату для продовження основної програми польоту. Зменшення витрат робочого тіла на розвантаження системи силових гіроскопів за допомогою запропонованого способу досягає декілька разів в залежності від початкової орієнтації вектору сумарного кінетичного моменту.
ДивитисяДодаткова інформація
Назва патенту англійськоюUnloading system of power gyroscopic complex of a spacecraft
Автори англійськоюKuznietsov Yurii Oleksiiovych, Bandura Ivan Mykolaiovych
Назва патенту російськоюСистема разгрузки силового гироскопического комплекса космического аппарата
Автори російськоюКузнецов Юрий Алексеевич, Бандура Иван Николаевич
МПК / Мітки
МПК: B64G 1/24
Мітки: комплексу, силового, гіроскопічного, розвантаження, система, апарата, космічного
Код посилання
<a href="https://ua.patents.su/3-64339-sistema-rozvantazhennya-silovogo-giroskopichnogo-kompleksu-kosmichnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система розвантаження силового гіроскопічного комплексу космічного апаратa</a>
Спосіб розвантаження системи силових гіроскопів космічного апарата
Номер патенту: 62147
Опубліковано: 15.12.2003
Автори: Успенський Валерій Борисович, Голоскоков Євген Григорович, Бандура Іван Миколайович, Кузнєцов Юрій Олексійович
МПК: B64G 1/24
Мітки: розвантаження, космічного, системі, гіроскопів, спосіб, апарата, силових
Формула / Реферат:
Спосіб розвантаження системи силових гіроскопів космічного апарата, який полягає в тому, що вимірюють вектор нагромадженого кінетичного моменту системи силових гіроскопів, вимірюють вектор абсолютної кутової швидкості космічного апарата, визначають сумарний вектор кінетичного моменту космічного апарата, виконують розвантаження за допомогою реактивних двигунів орієнтації, який відрізняється тим, що фіксують момент досягнення допустимого...
Електромагнітна система формування керуючих моментів космічного апарата
Номер патенту: 37505
Опубліковано: 15.11.2002
Автори: Большакова Іннеса Антонівна, Шмідт Ігор Рихардович, Покатаєв Віктор Миколайович, Нікітіна Наталія Павлівна, Попов Андрій Анатолійович, Ткаліч Віктор Григорович, Дмитрієв Борис Вікторович, Меланченко Олександр Геннадійович, Салтиков Юрій Дмитрович, Гладілін Віталій Сергійович
МПК: G01R 33/038, B64G 1/24, G01R 33/02
Мітки: моментів, космічного, апарата, керуючих, система, формування, електромагнітна
Формула / Реферат:
1. Електромагнітна система формування керуючих моментів космічного апарата, що включає триосьовий магнітометр, блок сенсорів, що підключений по входу до блока керування системи, три канали керування, що містять електромагнітний виконавчий орган з робочими котушками, які жорстко зв'язані з осями супутника, і блоки формування напруги живлення котушок, які з'єднані з виходами блока керування через аналого-цифровий перетворювач, яка...
Блок керування силового циліндра
Номер патенту: 43944
Опубліковано: 15.01.2002
Автори: Хорунжий Володимир Дмитрович, Дзержинський Віталій Олександрович, Шевченко Микола Іванович
МПК: F15C 3/00
Мітки: силового, блок, керування, циліндра
Формула / Реферат:
Блок керування силового циліндра, що складається з розподільника, порожнини якого з'єднані з поршневою і штоковою порожнинами силового циліндра і приводом розподільника, який відрізняється тим, що привід розподільника виконано у вигляді клапанів тиску, які підключені паралельно основній схемі керування силового циліндра.
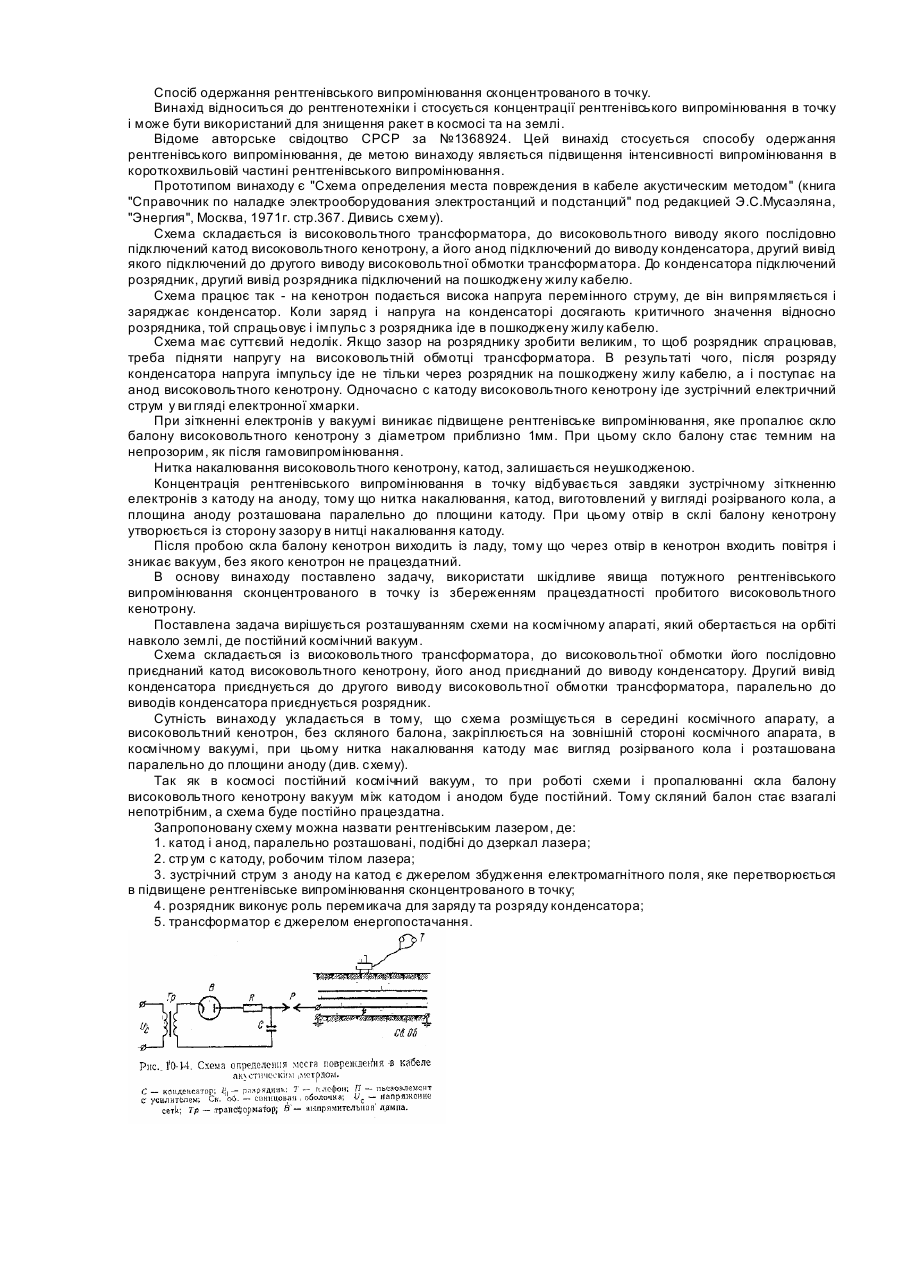
Спосіб використання космічного вакууму для багаторазової роботи високовольтного кенотрона
Номер патенту: 64067
Опубліковано: 16.02.2004
Автор: Мазур Олександр Дмитрович
МПК: G21K 5/00
Мітки: роботи, спосіб, багаторазової, використання, кенотрона, вакууму, космічного, високовольтного
Формула / Реферат:
Спосіб використання космічного вакууму для багаторазової роботи високовольтного кенотрону, розташованого в схемі утворення концентрованого рентгенівського випромінювання в точку, який відрізняється тим, що схему розміщують в середині космічного апарату, а високовольтний кенотрон, без скляного балону, закріплюється на зовнішній стороні космічного апарату, в космічному вакуумі, при цьому нитка накалювання катоду має вигляд розірваного кола і...
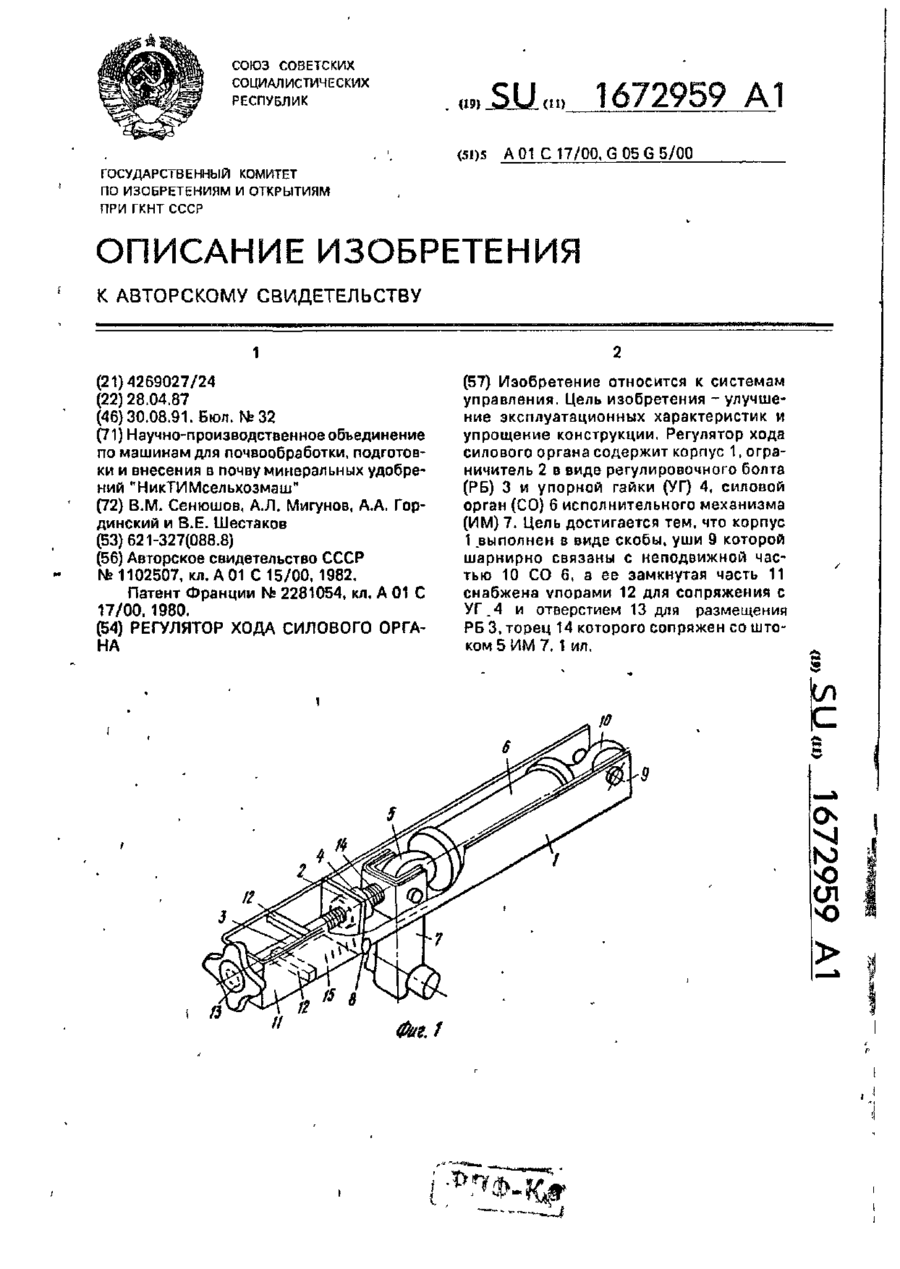
Регулятор ходу силового органу
Номер патенту: 16111
Опубліковано: 29.08.1997
Автори: Шестаков Володимир Егорович, Мигунов Анатолій Львович, Сенюшов Володимир Михайлович, Гординський Олександр Анатолійович
МПК: A01C 17/00, G05G 5/00
Мітки: регулятор, силового, органу, ходу
Формула / Реферат:
Регулятор хода силового органа, содержащий корпус, ограничитель, выполненный в виде резьбовой пары, состоящей из регулировочного болта с упорной гайкой, сопряженной со штоком силового органа исполнительного механизма, указатель хода, отличающийся тем, что, с целью улучшения эксплуатационных характеристик и упрощения конструкции, корпус ограничителя выполнен в виде скобы, уши которой шарнирно связаны с неподвижной частью силового органа, а...
Попередній патент: Пристрій захисту трифазного електродвигуна від аварійних режимів
Наступний патент: Спосіб визначення локального ефекту токсичного впливу важких металів
Випадковий патент: Пристрій захисту конвеєра з приводом від перетворювача частоти