Електромагнітна система формування керуючих моментів космічного апарата
Номер патенту: 37505
Опубліковано: 15.11.2002
Автори: Ткаліч Віктор Григорович, Дмитрієв Борис Вікторович, Нікітіна Наталія Павлівна, Гладілін Віталій Сергійович, Большакова Іннеса Антонівна, Салтиков Юрій Дмитрович, Меланченко Олександр Геннадійович, Попов Андрій Анатолійович, Покатаєв Віктор Миколайович, Шмідт Ігор Рихардович

Формула / Реферат
1. Електромагнітна система формування керуючих моментів космічного апарата, що включає триосьовий магнітометр, блок сенсорів, що підключений по входу до блока керування системи, три канали керування, що містять електромагнітний виконавчий орган з робочими котушками, які жорстко зв'язані з осями супутника, і блоки формування напруги живлення котушок, які з'єднані з виходами блока керування через аналого-цифровий перетворювач, яка відрізняється тим, що у кожен з трьох каналів додатково введені сенсор магнітного моменту та компенсуюча котушка, що встановлені в електромагнітні виконавчі органи, блок формування струму живлення сенсора магнітного моменту і блок формування напруги живлення компенсаційної котушки, що зв'язаний через аналого-цифровий перетворювач і оперативний запам'ятовуючий пристрій з виходом блока керування, вихід сенсора магнітного моменту з'єднаний через узгоджувальний пристрій із входом блока керування.
2. Електромагнітна система по п. 1, яка відрізняється тим, що у кожен з трьох каналів керування електромагнітними виконавчими органами введено формувач знака напруги котушок, що зв'язаний по двох входах з виходами елементів "І", суміщених з елементами затримки, перші входи яких зв'язані з виходами блока керування , "+Х", "-X", "+Y", "-Y", "+Z", "-Z", а другі входи зв'язані з першими входами протилежних елементів "І", перший вихід формувача знака напруги котушок, зв'язаний з першим входом першого вихідного елемента "І", другим входом першого елемента "І" та другим входом четвертого елемента "І" комутації полярності робочої котушки, третій вихід формувача знака напруги котушок зв'язаний з першим входом другого вихідного елемента "І", другим входом другого елемента "І" та другим входом третього елемента "І" комутації полярності робочої котушки, на перші входи першого та другого елементів "І" комутації полярності робочої котушки та на другі входи третього та четвертого елементів "І" комутації полярності робочої котушки подаються "+" і "-" напруги формувача живлення основної котушки, виходи першого, другого, третього та четвертого елементів "І" комутації полярності робочої котушки зв'язані з кінцями основної котушки, другий та четвертий виходи формувача знака напруги котушок зв'язані через другі входи першого та другого вихідних елементів "І" з першими входами першого, другого, третього та четвертого елементів "І" комутації полярності компенсаційної котушки, виходи яких зв'язані з кінцями компенсаційної котушки, а другі входи цих елементів зв'язані з виходами "+" і "-" напруги формувача живлення компенсаційної котушки.
3. Електромагнітна система по п. 1, яка відрізняється тим, що в кожному електромагнітному виконавчому органі сенсор магнітного моменту, наприклад елемент Холла, розташовано на торці магнітопроводу у порожнині концентратора магнітного поля.
Текст
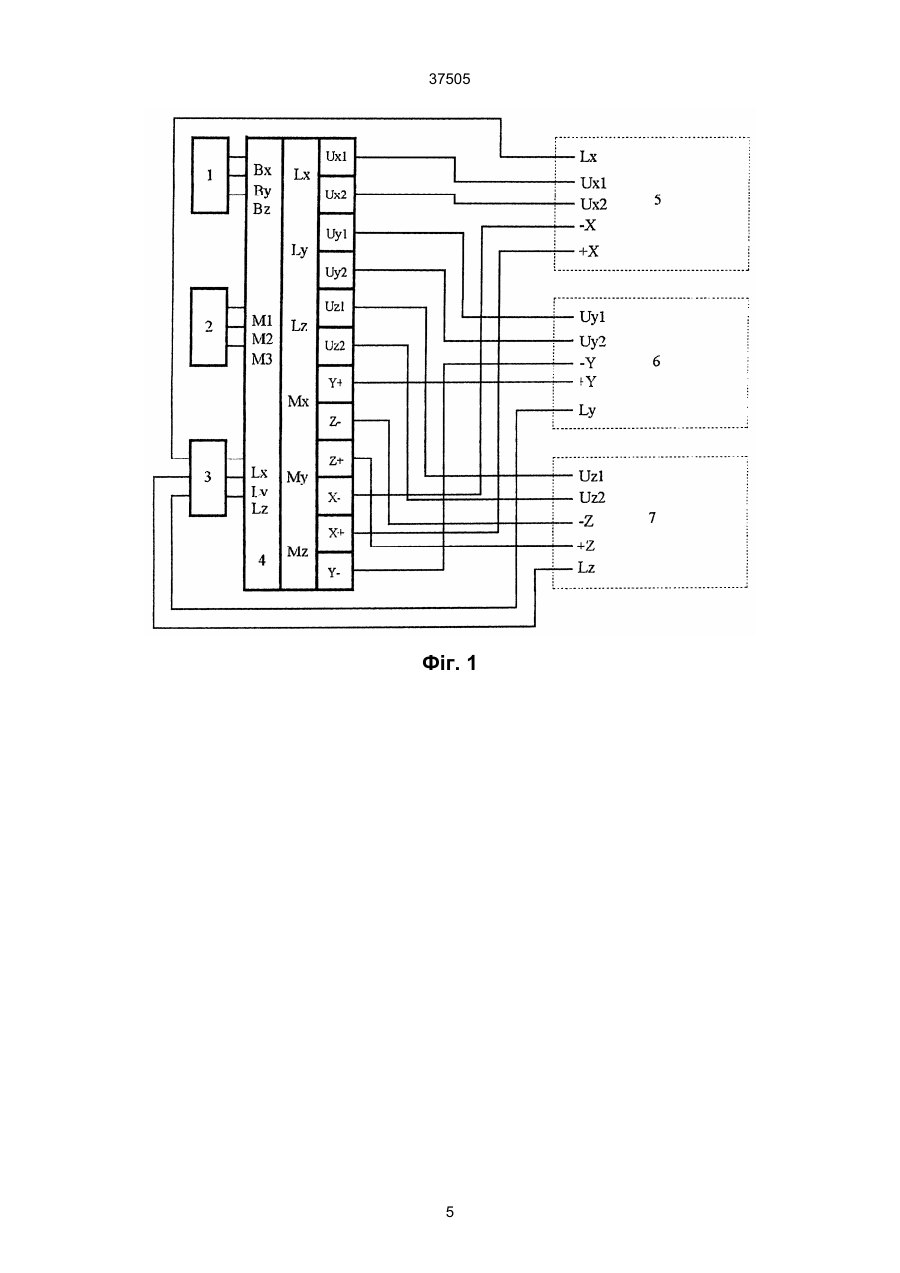
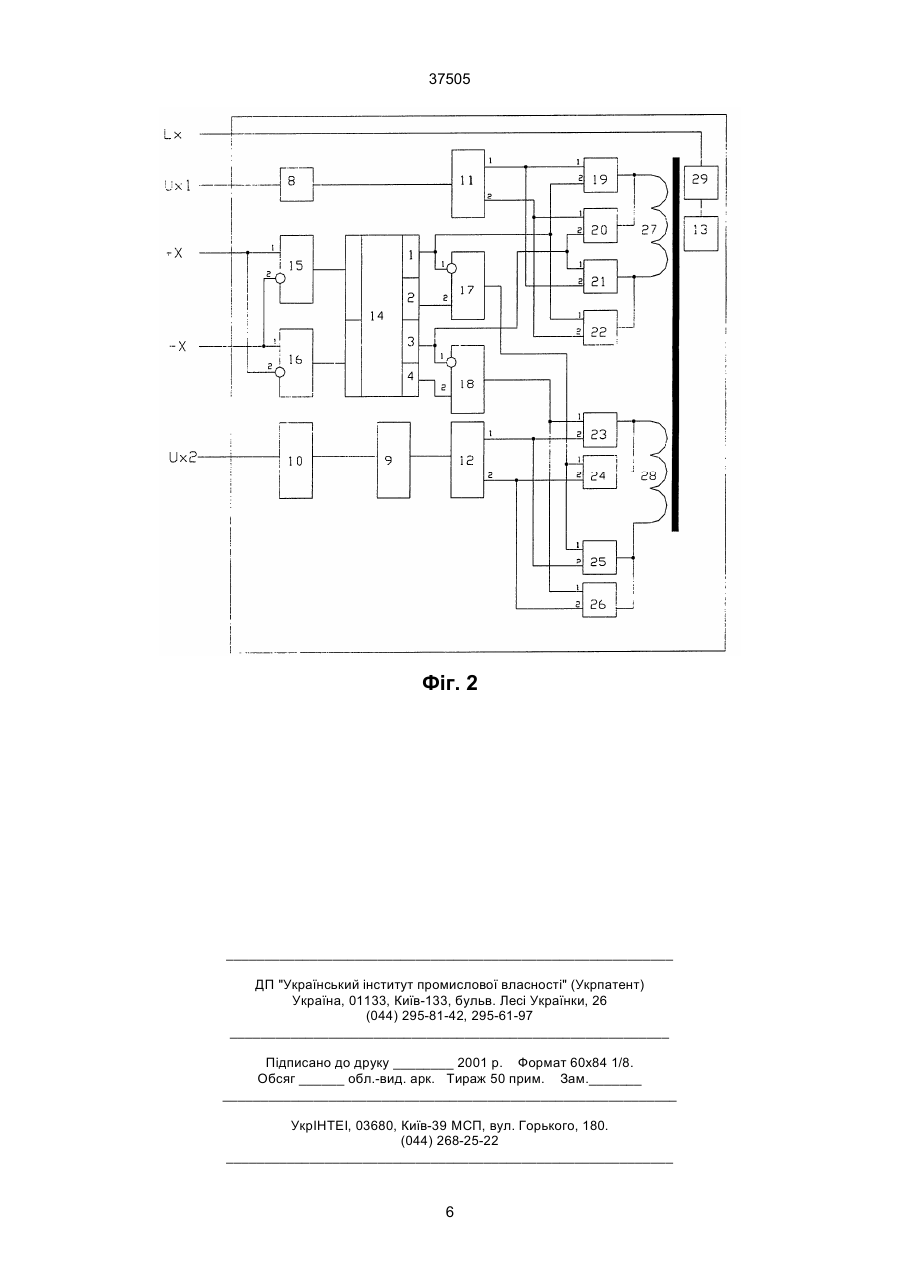
1. Електромагнітна система формування керуючих моментів космічного апарата, що включає трьохосьовий магнітометр, блок сенсорів, що підключений по входу до блока керування системи, три канали керування, що містять електромагнітний виконавчий орган з робочими котушками, які жорстко зв'язані з осями супутника, і блоки формування напруги живлення котушок, які з'єднані з виходами блока керування через аналогоцифровий перетворювач, яка відрізняється тим, що у кожен з трьох каналів додатково введені сенсор магнітного моменту та компенсуюча котушка, що встановлюються в електромагнітні виконавчі органи, блок формування струму живлення сенсора магнітного моменту і блок формування напруги живлення компенсаційної котушки, що зв'язаний через аналого-цифровий перетворювач і оперативний запам'ятовуючий пристрій з виходом блока керування, вихід сенсора магнітного моменту з'єднаний через узгоджувальний пристрій із входом блока керування. 2. Електромагнітна система по п. 1, яка відрізняється тим, що у кожен з трьох каналів керування електромагнітними виконавчими органами введено формувач знаку напруги котушок, що зв'язаний A (54) ЕЛЕКТРОМАГНІТНА СИСТЕМА ФОРМУВАННЯ КЕРУЮЧИХ МОМЕНТІВ КОСМІЧНОГО АПАРАТА 37505 неможливість компенсації залишкових магнітних моментів ЕМВО. З відомих магнітних систем найближчою з усіх за технічною суттю до пропонованої є система, яка містить три котушки що розташовані на осях орієнтації, керування якими здійснюється від підсилювачів за командами підсумовуючого пристрою, якій враховує кінетичні моменти маховичних двигунів або інших систем КА, і параметри магнітного поля Землі, які формуються по сигналах трьохосьового магнітометра. Система працює у релейному режимі [3]. Задачею винаходу є забезпечення формування магнітного моменту потрібного знака, виключення залишкового моменту ЕМВО, який виникає за рахунок залишкової індукції при зніманні напруги живлення з котушки, виключення створення дуги (ефект Пашена) при переключенні полярності напруги живлення робочої котушки, підвищення точності регулювання за рахунок конструктивного розміщення сенсора магнітного моменту (МЧЕ) у зоні концентратора магнітного поля магніто проводу. У результаті досягається поліпшення динамічних характеристик системи стабілізації і КА в цілому. Наведені технічні результати досягаються за рахунок того, що у систему, яка включає трьохосьовий магнітометр, блок сенсорів, що підключений по входу до блока керування системи, і три канали керування, що містять ЕМВО з робочими котушками, які жорстко зв'язані з осями КА, і блоки формування напруги живлення котушок, які з'єднані через формувач напруги та аналогоцифровий перетворювач (АЦП) з виходами блока керування (БК) Lx, Ly, Lz, а також додатково введені МЧЕ та компенсуючи котушка, що встановлюються в ЕМВО, блок формування струму живлення МЧЕ і блок формування напруги живлення компенсуючої котушки, що зв'язаний через АЦП і оперативний запоминаючий пристрій (ОЗП) з виходом БК, вихід МЧЕ з'єднаний через узгоджувальний пристрій із входом БК, блок формування напруги компенсуючої котушки, що зв'язаний з виходом БК через послідовно з'єднані АЦП і ОЗП, МЧЕ, що зв'язаний по входу з формувачем струму керування, а по виходу через АЦП із входом БК, формувач знаку напруги котушок, зв'язаний по двом входам з виходами елементів "І", перші входи яких зв'язані з виходами БК "+Х", "-X", "+Y", "-Y", "+Z", "-Z", а другі входи зв'язані з першими входами протилежних елементів "І", перший вихід формувача знаку напруги котушок зв'язаний з першими входами елементів "І" 17, 22 і з другими входами елемента "І" 19, третій вихід формувача знаку напруги котушок зв'язаний з першими входами елементів "І" 18, 21 і з другим входом елемента "І" 20, на перші входи елементів "І" 19, 20 та на другі входи елементів "І" 21, 22 подаються "+" і "-" напруги формувача живлення основної котушки, виходи елементів "І" 19, 20, 21, 22 зв'язані з кінцями основної котушки, другий та четвертий виходи формувача знаку напруги котушок зв'язані через другі входи елементів "І" 17, 18 з першими входами елементів "І" 23, 24, 25, 26, виходи яких зв'язані з кінцями компенсуючої котушки, а другі входи цих елементів зв'язані з виходами "+" і "-" напруги формувача живлення компенсуючої котушки, в кожному ЕМВО МЧЕ (наприклад, елемент Холла) розташовано на торці магні топроводу у порожнині концентратора магнітного поля. Причинно-наслідковий зв'язок відмінностей винаходу з технічним результатом міститься у наступному. Формування потрібного закону зміни величини та знака керуючого моменту ЕМВО здійснюється за рахунок роботи на лінійній частині характеристики намагнічування магнітопроводу електромагніта. При цьому БК 4 формує початкове значення та знак напруги ЕМВО в цифровій формі, після перетворення ЦАП 8 та підсилювання формувачем напруги 11 ця напруга подається на робочу котушку ЕМВО 27, причому, формування знака напруги, що подається, здійснюється формувачем знака 14 і відповідними його вхідними 15, 16, вихідними 17, 18 та комутуючими 19-22 елементами "І". Автоматична підтримка заданого значення магнітного моменту робиться по сигналу від МЧЕ 29, інформація від якого поступає на вхід БК через узгоджувальний пристрій 3. На підставі аналізу інформації МЧЕ БК формує уточнене значення напруги робочої та компенсуючої котушок ЕМВО, що забезпечує потрібний закон регулювання. Задача компенсації залишкового моменту ЕМВО вирішується компенсуючою котушкою, на яку подається напруга, пропорційна значенню напруги живлення робочої котушки потрібного знаку. Подання напруги на цю котушку здійснюється після зняття напруги з робочої котушки, при цьому вибір величини напруги здійснюється ОЗП 10, ЦАП 9, формувачем напруги 12, формування знака вищезгаданим формувачем 14, його вхідними і вихідними елементами "І", а комутація компенсуючої котушки - елементами "І" 23-26. Виключення можливих електричних пробоїв між контактами електричних ланцюгів ЕМВО, які в процесі орбітального польоту знаходяться у середовищі з тиском порядку одиниць мм рт. ст. (ефект Пашена), шляхом зменшення величини напруги, що подається на комутаційні елементи разом з переключенням полярності напруги на робочій котушці. Зменшення величини напруги здійснюється введенням вхідних та вихідних елементів "І" 15-18 у формувача знаку 14, які забезпечують затримку в часі при переключенні полярності напруги та переході з робочої котушки на компенсуючі. Підвищення точності регулювання магнітного моменту кожної з котушок забезпечується розташуванням МЧЕ у концентраторі магнітного поля магнітопроводу, при цьому переважна частина магнітних силових ліній ЕМВО проходить крізь МЧЕ, що забезпечує максимальну вірогідність та роздільну здатність (чутливість) вимірювань. Поліпшення динаміки роботи системи стабілізації КА є наслідком можливості регулювання величини магнітного моменту і виключення залишкового магнітного моменту. Сумарний результат реалізується надбанням відомими засобами, а саме ЕМВО, формувачами напруги та знака, елементами затримки і МЧЕ, додаткових функціональних можливостей, обумовлених регулюванням величини і знака магнітного моменту і виключенням залишкового магнітного моменту, можливості виникнення пробою між електричними контактами ЕМВО, кидків напруги при переключенні полярності. 2 37505 Таким чином, відміни, які пропонуються, є суттєвими, бо мають причинно-наслідковий зв'язок з технічним результатом. Додатковою перевагою системи, що заявляється, порівняно з прототипом, є поліпшення її динамічних властивостей в умовах орбітального космічного польоту. Зокрема, відомий електромагнітний пристрій для орієнтації супутника [2], який, як і пристрій за винаходом, містить три котушки, встановлені на магнітопроводи, жорстко зв'язані з осями орієнтації КА, та, як і система, що заявляється, забезпечує керування КА за рахунок взаємодії з магнітним полем Землі. Разом з тим, система, що заявляється, забезпечує будь-який закон регулювання величини магнітного моменту, для чого в неї введено сенсор вимірювання магнітного моменту, блоки ЦАП, формування напруги та знака магнітного моменту. Саме відсутність цих пристроїв не дозволила відомому рішенню здійснювати довільний закон керування, а тільки релейний [2]. Поряд з цим у винахід введено додаткову компенсаційну котушку для виключення залишкового магнітного моменту, а також блоки формування напруги і знака для цієї котушки. Відсутність саме цих вузлів у прототипі призводить до виникнення в ньому залишкового магнітного моменту, котрий внаслідок своєї невизначеності не може враховуватись системою керування та призводить до погіршення динамічних характеристик апарата [3]. Нарешті, в рішенні за винаходом переключення полярності напруги робочої котушки здійснюється, практично, у знеструмленому стані за рахунок введення для затримки і керування переключенням відповідних елементів "І" що, крім полегшення режимів комутації, виключає виникнення пробою між електричними контактами ЕМВО у перші місяці експлуатації (ефект Пашена) [4]. Такі рішення відсутні у відомих системах,що знижує надійність їх роботи на орбіті. Розгляд відмінних ознак винаходу дозволяє також відзначити, що в ньому не передбачено доповнень відомими засобами, що приєднані до нього за відомими правилами, для досягнення задачі, що поставлена, по відношенню до якої встановлено вплив саме - таких доповнень; не передбачається заміна будь-якої частини відомого засобу іншою відомою частиною для вирішення задачі, що поставлена, по відношенню до якої встановлено вплив саме такої заміни; відсутнє виключення будь-якої частини засобу з одночасним виключенням функції обумовленої її наявністю, і досягненням при цьому звичайного для такого виключення результату; не виявлено збільшення кількості однотипних елементів для підсилювання технічного результату, обумовленого наявністю саме таких елементів; не убачається створення засобу, що містить відомі частини, зв'язок між якими здійснено на підставі відомих правил, і технічний результат, що досягається, не обумовлений тільки відомими властивостями частин цього засобу та зв'язків між ними. На фіг. 1 зображено блок-схему пропонованої системи. Система складається з магнітометра 1, блоку сенсорів системи орієнтації КА 2, узгоджувального пристрою 3, блоку керування 4 та трьох каналів керування 5, 6, 7, відповідно, по осях X, Y, Z. Канал керування ЕМВО по відповідній осі КА зображено на фіг 2. Кожен з каналів містить цифро-аналоговий перетворювач 8, 9, ОЗП 10, блоки формування: напруги основної 11 та додаткової компенсуючої 12 обмоток і струму сенсора магнітного моменту 13; формувач знака напруги котушок 14 разом з елементами "І" 15-26; робоча 27 та компенсаційна 28 котушки розташовуються на магнітопроводі; в торцевій частині ЕМВО розташовуються концентратори магнітного поля, роль яких полягає в зменшенні розсіювання магнітного потоку з бокових поверхонь стержня, завдяки чому розташування МЧЕ 29 у порожнинах вказаних шайб дозволяє якомога більш достовірно робити висновок про величину магнітного моменту. Як магнітометр 1 може бути використано трьохосьовий магнітометр будь-якої моделі, наприклад, ферозондовий магнітометр, що використається на КА "Мікросупутник". Блок сенсорів системи орієнтації КА 2 містить, як правило, стандартні сенсори кутового стану та/або кутової швидкості КА (гіроскопічні, оптико електронні, радіотехнічні і т.ін.), сенсори швидкості обертання маховичних двигунів та бортовий обчислювач, який формує оцінки потрібних керуючих моментів Мі за інформацією сенсорів. Узгоджувальний пристрій 3 призначено для перетворення інформації сенсорів магнітного моменту (МЧЕ), він містить послідовно з'єднані стандартні підсилювачі, аналого-цифрові перетворювачі, ключі, що обираються з довідкової літератури [5], [6]. Блок керування (БК) 4 виконує функції: аналіз інформації, що надходить; порівняння сигналів МЧЕ з інформацією, що зберігається в ОЗП; обчислення величини і знака керуючих сигналів для отримання потрібних за величиною і знаком моментів, що прикладені до КА; формування керуючих напруг, що видаються у канали керування 5, 6, 7, відповідно, по осях X, Y, Z, у вигляді сигналів Ux1, Ux2, -X, +Х, Uy1, Uy2, -Y, +Y, Uz1, Uz2, -Z, +Z в цифровій (дискретній для знака) формі. Залежно від задачі, що вирішується, БК може бути реалізовано на базі цифрових процесорів обробки аналогових сигналів APS (наприклад, К1813ВЕ1), мікропрограмуємих цифрових процесорів PS (наприклад, К1815), програмуємих комутаторів РМ (наприклад, К1509), запам'ятовуючих пристроїв різного призначення [6], підсилювальних, ключових елементів [5] та логічних елементів [7]. Цифро-аналоговий перетворювач 8, 9, ОЗП 10, можуть бути виконані за однією з стандартних схем [6], блоки формування напруги основної 11 та додаткової компенсуючої 12 обмоток і струму сенсора магнітного моменту 13, можуть виконані з використанням підсилювальних елементів та джерел живлення [5] (наприклад, 140, 142 серій); формувач знаку напруги котушок 14 зв'язаний по двом входам з виходами елементів "І" 15, 16, перші входи яких зв'язані з виходами БК "+Х", "-Х" ("+У", "-Y", "+Z", "-Z" для двох інших каналів), а другі входи зв'язані з першими входами протилежних елементів "І", перший вихід формувача знаку напруги котушок зв'язаний з першими входами 3 37505 лючаючи робочу котушку до напруги Uі1 у прямому напрямку, при цьому сигнал на виході 2 - також сформується, після закінчення керування (зняття сигналу +Х) схема "І" 17 отримує дозвіл на включення по інверсному входу та подає напругу на елементи "І" 24, 25, включно з компенсаційною котушкою 28 у протилежній полярності відносно обмотки 27. Слід відзначити, що напруги Ux1 і Ux2 відключаються одночасно, але інформація про Ux2 зберігається в ОЗП 10 до появи наступного сигналу. При появі Ux1 і Ux2 одночасно із зміною +Х на -X переключення полярності напруги у робочій і компенсаційній обмотках здійснюється із затримкою, що задається елементами "І" та формувачем знака 14, який виключає кидки напруги при переключенні. Формувач струму 13 подає на МЧЕ потрібну величину струму, з МЧЕ 29 знімається напруга, пропорційна Lx, яка крізь у згоджу вальний пристрій 3 у цифровому вигляді подається в БК 4, при цьому напруги Ux1 і Ux2 можуть бути скориговані для забезпечення підтримки (регулювання) заданої величини LX. По каналах 6 (Y) і 7 (Z) робота здійснюється аналогічним чином. Для керування і регулювання Li використовується лінійна частка намагнічення магнітопроводу ЕМВО. Таким чином, вище викладені відомості свідчать про виконання при використанні пристрою за винаходом наступної сукупності умов: засіб, що утілює заявлений пристрій при його здійсненні, призначено для використання у промисловості, а саме, космічній техніці для серії "Мікросупутник"; для пристрою за винаходом у тому вигляді, як він охарактеризований в н.п. викладеного формулювання винаходу, підтверджено можливістю його здійснення за допомогою наведених у заяві або відомих до дати пріоритету засобів та методів; засіб, що утілює винахід при його здійсненні, спроможе забезпечити досягнення технічного результату, що передбачається заявником. Використання заявленої системи для КА серії "Мікросупутник" дозволяє підвищити точність керування на 1°, знизити потужність, що споживається, до 5 Вт порівняно з іншими системами (наприклад, газореактивною), а вагові характеристики до 12 кгс, таким чином, винахід відповідає умові "промислова застосовність". Джерела інформації 1. Коваленко А.П. Магнитные системы управления космическими летательными аппаратами. М.: Машиностроение, 1978. 2. Розенблат М.А. Магнитные элементы автоматики и вычислительной техники. - М.: Наука, 1974. 3. Патент США 3189298 кл. 244-1. Система управления для космического аппарата. 4. Рабин Л.И. Герконы. - М., 1968. 5. Аналоговые интегральные микросхемы: Справ. / Под ред. Б.П. Куфенов и др. - М.: Радио и связь, 1981. 6. Микропроцессоры и микроЭВМ: Справ. / Под ред. С.Т. Хвоща. - Л.: Машиностроение, 1987. 7. Вычислительные устройства на микросхемах: Справ. – К.: Техника, 1988. елементів "І" 17, 22 і другим входом елемента "І" 19, третій вихід формувача знаку напруги котушок зв'язаний з першими входами елементів "І" 18, 21 і з другим входом елемента "І" 20, на перші входи елементів "І" 19, 20 та на другі входи елементів "І" 21, 22 подаються "+" і "-" напруги формувача живленні основної котушки 27, виходи елементів "І" 19, 20, 21,22 зв'язані з кінцями основної котушки, другий та четвертий виходи формувача знаку напруги котушок зв'язані через другі входи елементів "І" 17, 18 з першими входами елементів "І" 23, 24, 25, 26, виходи яких зв'язані з кінцями компенсаційної котушки 28, а другі входи цих елементів зв'язані з виходами "+" і "-" напруги формувача живлення компенсаційної котушки. Конструкція робочої 27 та компенсаційної 28 котушок обирається на підставі відомих співвідношень [1]. При цьому використається пермалой 50Н, можливо, у комбінації з 79НМ. Як МЧЕ 29 може бути використано, наприклад, напівпровідниковий елемент на підставі ефекту Холла (наприклад, 40.207101.029 ТУ). Робота системи здійснюється наступним чином. Після виведення КА на орбіту і подання живлення на усі системи супутника отримання результуючого моменту від взаємодії ЕМВО та магнітного поля Землі підкоряється співвідношенням [1] М=L·B або М=L·H, де L – вектор магнітного моменту КА, В - вектор індукції, а Н - вектор напруженості магнітного поля Землі. У проекціях на осі КА рівняння записується у вигляді: Мх=Ly×Bz-Lz×By My=Lz Bx-Lx Bz Mz=LX By-Ly Bx При цьому БК 4 за інформацією блока сенсорів 2 і магнітометра 1 для поточних значень Ві (Ні) обчислюються Lx, Ly, Lz, та враховуючи інформацію про залежність Lі=f(U) для основної та компенсаційної котушок, яка записана у пам'ять БК при парируванні на заводі-виготовнику, визначаються Uі1 і Ui2 для основної та компенсаційної котушок для усіх трьох каналів ЕМВО, та їх знак, виходячи з наведених вище рівнянь. Напруги Ux1, Ux2, Uy1, Uy2, Uz1, Uz2 та потенціали на відповідних -X, +Х, -Y, +Y, -Z, +Z виходами БК 4 поступають на аналогічні входи каналів 5, 6, 7 керуючих ЕМВО по осях X, Y, Z. Напруги Ui видаються в цифрові формі, тому в кожному з каналів Ці перетворюються ЦАП 8, а Uі2 запам'ятається ОЗП 10 та перетворюється ЦАП 9 в аналогову форму, потім за допомогою формувачів напруги 11, 12 підсилюється до значень, необхідних для подання на робочу котушку 27 або компенсаційну котушку 28, подача напруги від блоків формування 11, 12 здійснюється в полярності, що визначається блоком формування знака 14, враховуючі знак сигналу (наприклад, +Х або -X для осі X). Припустимо, що нам треба отримати момент Mz по осі Z, вводячи Lx із знаком "+", тобто керуючій сигнал буде -Y, тоді сигнал +Х крізь елемент "І" 15, що дозволяє по другому входу інвертуємим сигналом -X (відсутній на відповіднім вході) поступає на формувач та крізь регулюєму затримку виникає у вигляді керуючої напруги на виході 1, подаючі дозволяючи напругу на елементи "І" 19, 22, підк 4 37505 Фіг. 1 5 37505 Фіг. 2 ___________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 6
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem with electromagnetic actuators designed for generating control torques of a spacecraft
Автори англійськоюPokataiev Viktor Mykolaiovych, Saltykov Yurii Dmytrovych
Назва патенту російськоюСистема с электромагнитными исполнительными устройствами, предназначенная для формирования управляющих моментов космического аппарата
Автори російськоюПокатаев Виктор Николаевич, Салтыков Юрий Дмитриевич
МПК / Мітки
МПК: G01R 33/038, G01R 33/02, B64G 1/24
Мітки: формування, електромагнітна, керуючих, космічного, моментів, апарата, система
Код посилання
<a href="https://ua.patents.su/6-37505-elektromagnitna-sistema-formuvannya-keruyuchikh-momentiv-kosmichnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Електромагнітна система формування керуючих моментів космічного апарата</a>
Мікрокомп’ютерна електромагнітна пошуково-вимірювальна система
Номер патенту: 37807
Опубліковано: 15.05.2001
Автори: Драбич Петро Петрович (мол.), Драбич Петро Петрович, Драбич Олег Петрович
МПК: G01R 19/00, G01V 3/10
Мітки: пошуково-вимірювальна, електромагнітна, мікрокомп'ютерна, система
Текст:
...напруг 9 приєднані початки другої і третьої вимірювальних котушок 5 і 6, закінчення вимірювальних котушок 4, 5 і 6 підключені до шини нульового потенціалу, виходи першого і другого віднімачів напруг 8 і 9 через вибірні підсилювачі 11 і 12 підключені мультиплексора 13, вихід якого з'єднаний з входом першого керованого підсилювача 14, вихід цього підсилювача з'єднаний з входом першого аналого-цифрового перетворювача 15, входи формувача...
Електромагнітна система визначення координат підземних комунікацій
Номер патенту: 28487
Опубліковано: 16.10.2000
Автори: Стецько Ігор Григорович, Зубик Йосиф Львович, Кичма Андрій Олексійович, Драбич Петро Петрович
МПК: G01R 33/02, G01R 19/00, E03F 7/00
Мітки: підземних, система, електромагнітна, визначення, комунікацій, координат
Формула / Реферат:
Електромагнітна система визначення координат підземних комунікацій, що складається з першого і другого однокомпонентних датчиків магнітного поля, розташованих в площині, перпендикулярній трубопроводу, послідовно включені підсилювач, амплітудний детектор, вихідний індикатор, третій однокомпонентний датчик магнітного поля, нуль-індикатор, індикатор рівня, регулятор підсилення і перемикач, причому третій однокомпонентний датчик магнітного поля...
Електромагнітна система визначення координат інженерних комунікацій
Номер патенту: 45377
Опубліковано: 15.04.2002
Автори: Яворський Ігор Миколайович, Драбич Олег Петрович, Драбич Петро Петрович
МПК: G01V 3/10, G01R 33/00
Мітки: координат, комунікацій, електромагнітна, інженерних, визначення, система
Формула / Реферат:
Електромагнітна система визначення координат інженерних комунікацій, яка складається з ближнього, середнього і дальнього відносно осі комунікації паралельно розміщених на одній осі ідентичних магнітоприймачів, першого, другого і третього пристроїв віднімання, першого і другого вузькосмугових підсилювачів, навушних телефонів, аналого-цифрового перетворювача і цифрового індикатора, в якій вихід ближнього магнітоприймача з'єднаний з першим...
Трьохканальний магнітометричний пристрій для вимірювання компонент діпольних магнітних моментів джерел зовнішнього магнітного поля
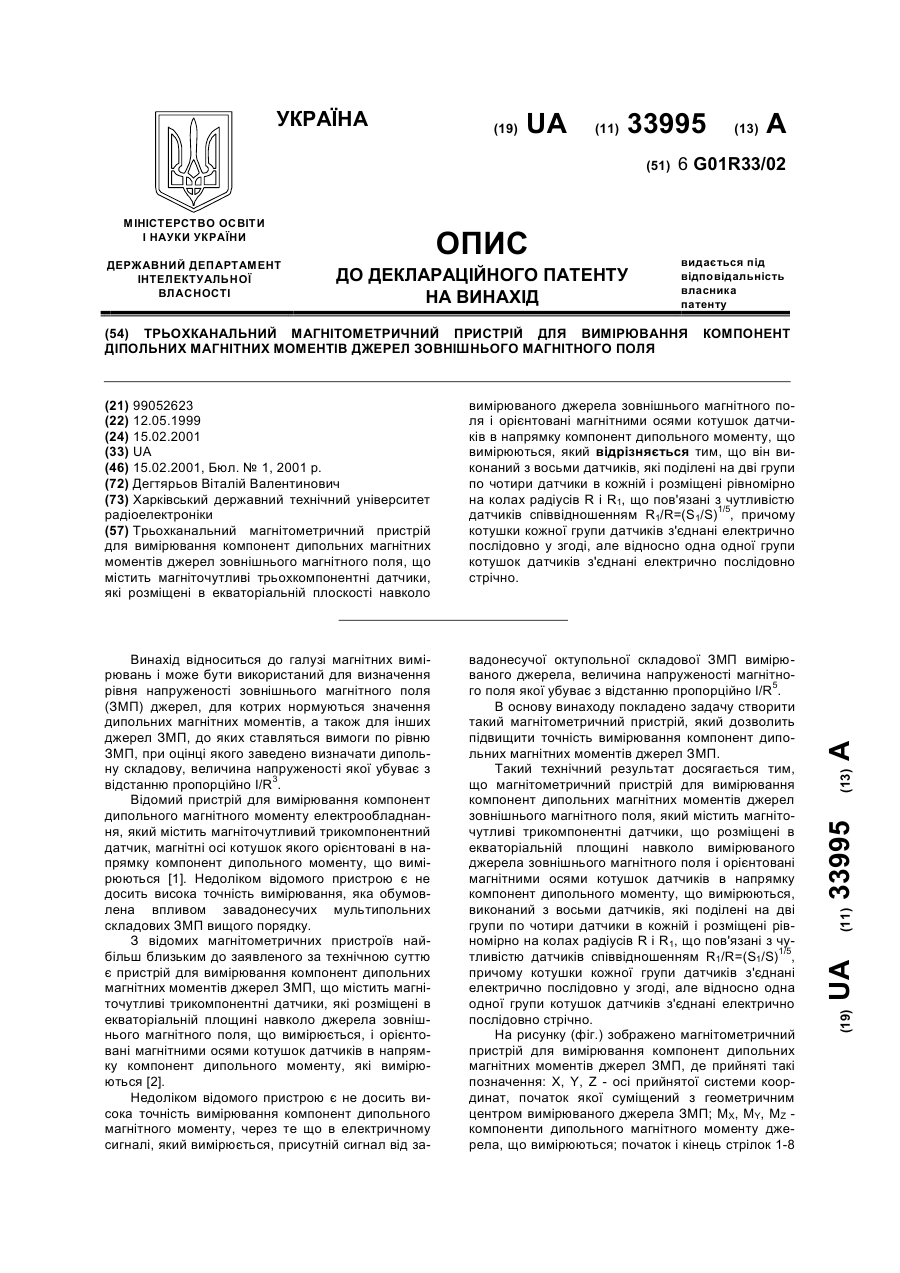
Номер патенту: 33995
Опубліковано: 15.02.2001
Автор: Дегтярьов Віталій Валентинович
МПК: G01R 33/02
Мітки: трьохканальний, пристрій, магнітних, магнітометричний, джерел, моментів, компонент, вимірювання, магнітного, зовнішнього, поля, діпольних
Текст:
...елементарного мультиполя n-го порядку. Компоненти напруженості ЗМП в сферичній системі координат знаходяться диференціюванням виразу (1) по відповідній координаті: Запропонований пристрій, як показали теоретичні і експериментальні дослідження, забезпечує зниження мультипольної методичної похибки вимірювання в разів порівняно з відомим магнітометричним пристроєм: Компоненти дипольної складової напруженості ЗМП пропорційні коефіцієнтам g11,...
Спосіб дугового зварювання неплавким електродом із використанням зовнішніх комбінованих керуючих магнітних полів і пристрій для його реалізації
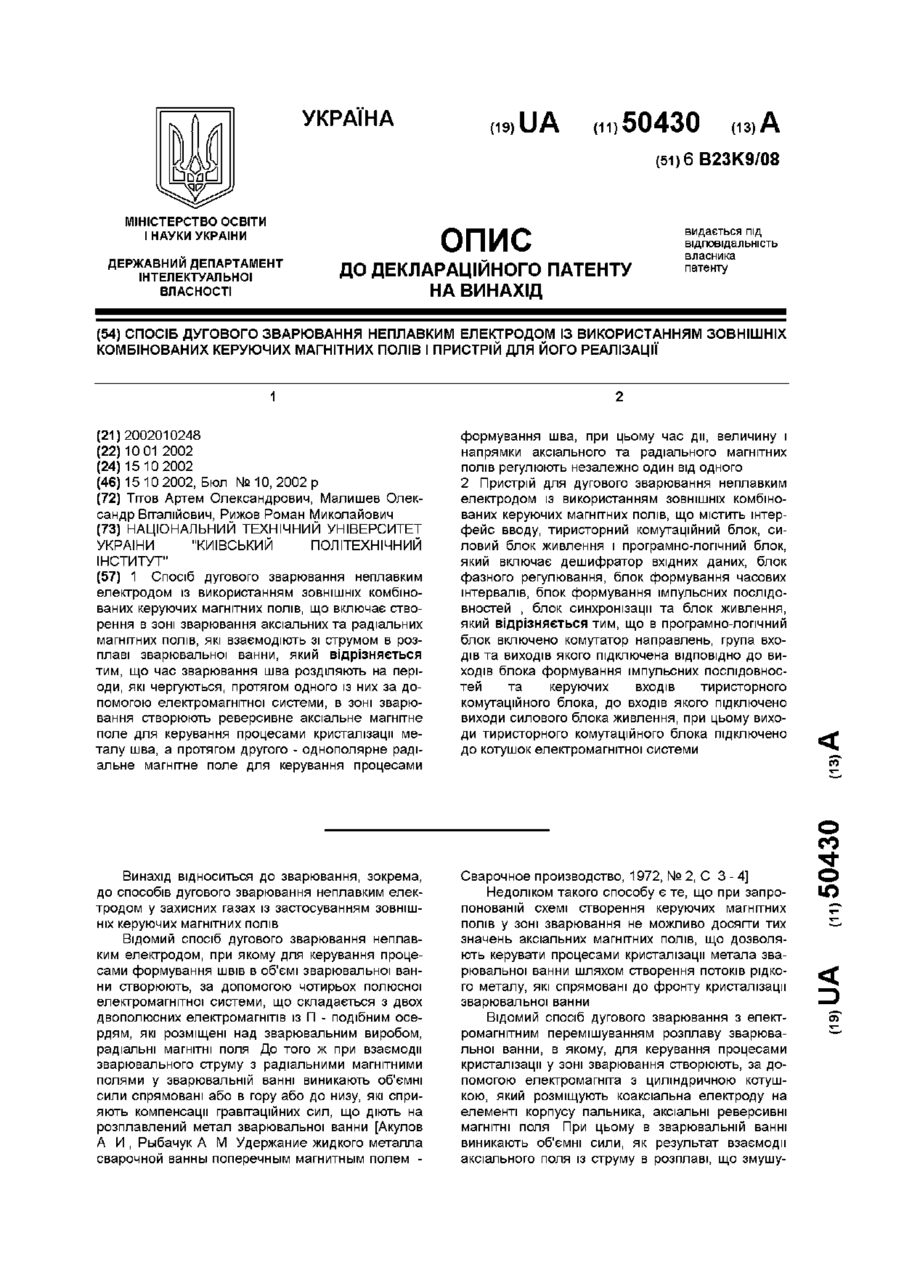
Номер патенту: 50430
Опубліковано: 15.10.2002
Автори: Тітов Артем Олександрович, Малишев Олександр Віталійович, Рижов Роман Миколайович
МПК: B23K 9/08
Мітки: пристрій, неплавким, дугового, використанням, комбінованих, зварювання, магнітних, керуючих, спосіб, зовнішніх, полів, електродом, реалізації
Формула / Реферат:
1. Спосіб дугового зварювання неплавким електродом із використанням зовнішніх комбінованих керуючих магнітних полів, що включає створення в зоні зварювання аксіальних та радіальних магнітних полів, які взаємодіють зі струмом в розплаві зварювальної ванни, який відрізняється тим, що час зварювання шва розділяють на періоди, які чергуються, протягом одного із них за допомогою електромагнітної системи, в зоні зварювання створюють реверсивне...
Попередній патент: Ковзна опалубка для зведення вторинних облицювань
Наступний патент: Розділена камера згоряння
Випадковий патент: Спосіб діагностики розвитку остеопорозу