Пристрій для вимірювання зусиль
Номер патенту: 55017
Опубліковано: 17.03.2003
Автори: Яровий Євгеній Андрійович, Гоготов Анатолій Анатолійович, Літвінов Леонід Васильович, Щетинін Віктор Вікторович
Формула / Реферат
1. Пристрій для вимірювання зусиль, що містить регулятор відстані, пружний елемент та індикатор виміру, який відрізняється тим, що в нього введено датчик виміру, з'єднаний через підсилювач з індикатором виміру; регулятор відстані виконано у вигляді двох скоб, одна з яких з можливістю переміщення встановлена на напрямних, закріплених в нерухомій скобі, пружний елемент встановлений в пазу нерухомої скоби і контактно з'єднаний з першим підп'ятником, встановленим на рухомій скобі, відповідний йому другий підп'ятник закріплений на нерухомій скобі, а датчик виміру встановлений між підп'ятниками.
2. Пристрій по п. 1, який відрізняється тим, що датчиком виміру є п'єзоелектричний датчик.
3. Пристрій по п. 1, який відрізняється тим, що елементи фіксації виконані у вигляді крючків.
4. Пристрій по п. 1, який відрізняється тим, що елементи фіксації виконані у вигляді затискачів.
Текст
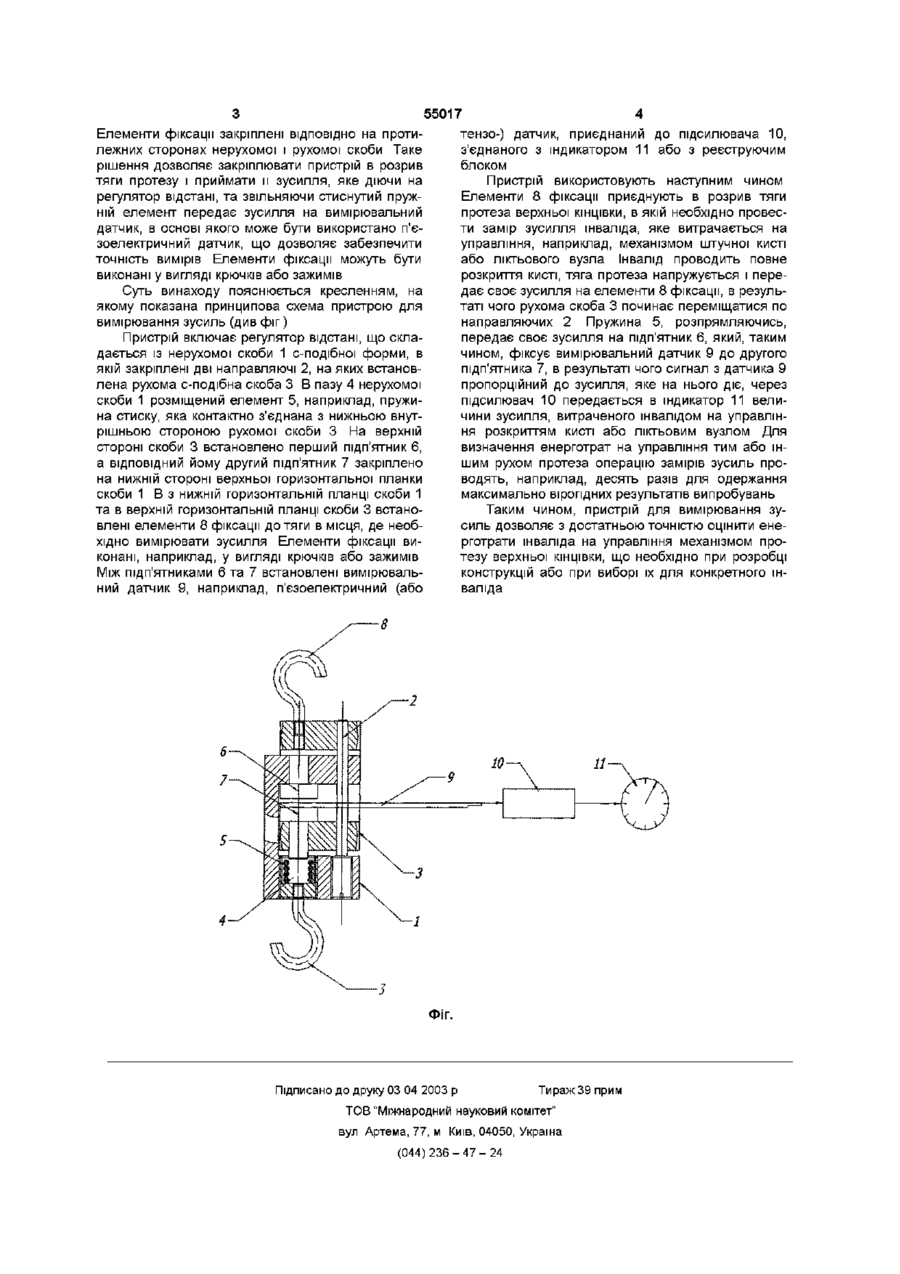
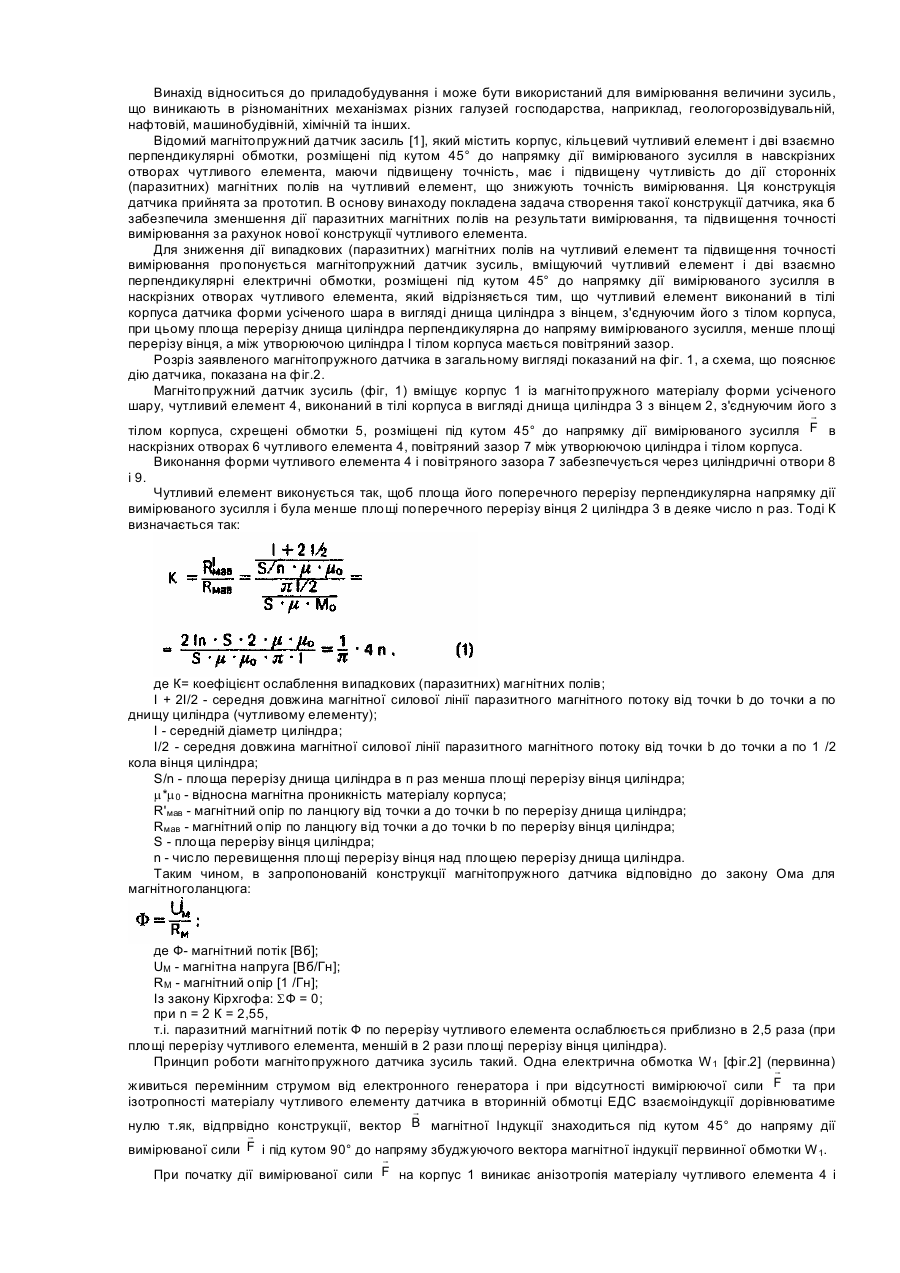
1 Пристрій для вимірювання зусиль, що містить регулятор відстані, пружний елемент та індикатор виміру, який відрізняється тим, що в нього введено датчик виміру, з'єднаний через підсилювач з індикатором виміру, регулятор відстані вико нано у вигляді двох скоб, одна з яких з можливістю переміщення встановлена на напрямних, закріплених в нерухомій скобі, пружний елемент встановлений в пазу нерухомої скоби і контактно з'єднаний з першим підп'ятником, встановленим на рухомій скобі, ВІДПОВІДНИЙ йому другий підп'ятник закріплений на нерухомій скобі, а датчик виміру встановлений між підп'ятниками 2 Пристрій по п 1, який відрізняється тим, що датчиком виміру є п'єзоелектричний датчик 3 Пристрій по п 1, який відрізняється тим, що елементи фіксації виконані у вигляді крючків 4 Пристрій по п 1, який відрізняється тим, що елементи фіксації виконані у вигляді затискачів Винахід відноситься до медичної техніки, точніше до протезування та протезобудування і може бути використаний при визначенні та дослідженні силових характеристик які потрібні на управління конаний у вигляді двох шарнірів Цей пристрій дозволяє проводити заміри силових характеристик кисті при різних видах захвату По технічній суті та досягаемому результату пристрій найбільш близький до заявляемого, тому прийнятий за прототип Недоліки його полягають в тому, що він не пристосований до виміру зусиль, які потрібні на управління протезом верхньої КІНЦІВКИ, а ці показники важливі для оцінки енерговитрат інваліда на управління механізмом протезу Технічною задачею винаходу являється розробка пристосування для замірів зусиль, які витрачаються на управління протезом верхньої КІН протезом верхньої КІНЦІВКИ Відомий пристрій для вимірювання сили схвата кисті по авт св SU № 327929, 1972 р, який включає основу, направляючі, рухому рамку з ноніусним вимірювальним механізмом, технологічні датчики, елементи кріплення, фіксації та регулювання Цей пристрій дозволяє визначати силу схвата кисті та величину зусиль, які витрачаються приводом на подолання величин деформацій та переміщень при схваті предметів Недоліки його полягають втому, що в пристрої використовують імітатор механізму сили схвата, що не дозволяє використовувати його при випробуванні механізмів управління штучною кистю, крім того пристрій не дозволяє проводити заміри зусиль, які потрібні на управління протезом верхньої КІНЦІВКИ Відомий також пристрій для вимірювання зусиль (в оригіналі «Динамометр кистевой») по автсв SU № 1112243, G01L5/02, 1984 р, який включає дві рукоятки з регулятором відстані між ними, зв'язаний з ними корпус, в якому закріплені пружний елемент, індикатор з фіксатором виміру та блок самоорієнтіровки пружного елементу, ви ЦІВКИ Ця задача вирішена тим, що в пристрої для вимірювання зусиль, який містить регулятор відстані, пружний елемент та індикатор виміру, ВІДМІННІСТЮ є те, що в нього введені датчик виміру, з'єднаний через підсилювач з індикатором виміру, та елементи фіксації, регулятор відстані виконано у вигляді двох с-подібних скоб, одна з яких встановлена з можливістю переміщення за направляючими, закріпленими в нерухомій скобі, пружний елемент встановлений в пазу нерухомої скоби і контактно з'єднаний з першим підп'ятником, встановленим на рухомій скобі, ВІДПОВІДНИЙ йому другий підп'ятник закріплений на нерухомій скобі, а датчик виміру встановлений між підп'ятниками О ю ю 55017 Елементи фіксації закріплені ВІДПОВІДНО на протитензо-) датчик, приєднаний до підсилювача 10, лежних сторонах нерухомої і рухомої скоби Таке з'єднаного з індикатором 11 або з реєструючим рішення дозволяє закріплювати пристрій в розрив блоком тяги протезу і приймати и зусилля, яке діючи на Пристрій використовують наступним чином регулятор відстані, та звільняючи стиснутий пружЕлементи 8 фіксації приєднують в розрив тяги ній елемент передає зусилля на вимірювальний протеза верхньої КІНЦІВКИ, В ЯКІЙ необхідно провесдатчик, в основі якого може бути використано п'єти замір зусилля інваліда, яке витрачається на зоелектричний датчик, що дозволяє забезпечити управління, наприклад, механізмом штучної кисті точність вимірів Елементи фіксації можуть бути або ліктьового вузла Інвалід проводить повне виконані у вигляді крючків або зажимів розкриття кисті, тяга протеза напружується і передає своє зусилля на елементи 8 фіксації, в резульСуть винаходу пояснюється кресленням, на таті чого рухома скоба 3 починає переміщатися по якому показана принципова схема пристрою для направляючих 2 Пружина 5, розпрямляючись, вимірювання зусиль (див фіг) передає своє зусилля на підп'ятник 6, який, таким Пристрій включає регулятор відстані, що склачином, фіксує вимірювальний датчик 9 до другого дається із нерухомої скоби 1 с-подібної форми, в підп'ятника 7, в результаті чого сигнал з датчика 9 якій закріплені дві направляючі 2, на яких встановпропорційний до зусилля, яке на нього діє, через лена рухома с-подібна скоба З В пазу 4 нерухомої підсилювач 10 передається в індикатор 11 велискоби 1 розміщений елемент 5, наприклад, пружичини зусилля, витраченого інвалідом на управлінна стиску, яка контактно з'єднана з нижньою внутня розкриттям кисті або ліктьовим вузлом Для рішньою стороною рухомої скоби 3 На верхній визначення енерготрат на управління тим або інстороні скоби 3 встановлено перший підп'ятник 6, шим рухом протеза операцію замірів зусиль проа ВІДПОВІДНИЙ йому другий підп'ятник 7 закріплено водять, наприклад, десять разів для одержання на нижній стороні верхньої горизонтальної планки максимально вірогідних результатів випробувань скоби 1 В з нижній горизонтальній планці скоби 1 та в верхній горизонтальній планці скоби 3 встаноТаким чином, пристрій для вимірювання зувлені елементи 8 фіксації до тяги в місця, де необсиль дозволяє з достатньою точністю оцінити енехідно вимірювати зусилля Елементи фіксації вирготрати інваліда на управління механізмом проконані, наприклад, у вигляді крючків або зажимів тезу верхньої КІНЦІВКИ, що необхідно при розробці Між підп'ятниками 6 та 7 встановлені вимірювальконструкцій або при виборі їх для конкретного інний датчик 9, наприклад, п'єзоелектричний (або валіда Фіг. Підписано до друку 03 04 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measuring force
Автори англійськоюSchetynin Viktor Viktorovych, Hohotov Anatolii Anatoliiovych, Litvinov Leonid Vasyliovych
Назва патенту російськоюУстройство для измерения усилий
Автори російськоюЩетинин Виктор Викторович, Гоготов Анатолий Анатольевич, Литвинов Леонид Васильевич
МПК / Мітки
МПК: A61B 5/103
Мітки: пристрій, зусиль, вимірювання
Код посилання
<a href="https://ua.patents.su/2-55017-pristrijj-dlya-vimiryuvannya-zusil.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання зусиль</a>
Пристрій для вимірювання зусиль у технологічному обладнанні
Номер патенту: 37652
Опубліковано: 15.05.2001
Автори: Альтман Ілля Аронович, Іщенко Олександр Петрович
МПК: G01L 1/22
Мітки: пристрій, вимірювання, обладнанні, зусиль, технологічному
Текст:
...фігурну гайку 8, центральну опору 9 та фланець 10, жорстко з'єднаний з основою пружного елемента стиснення 1. Порожнина пружного елемента стиснення 1 зачинена кришкою 11 і п'я тою 12. Нижній отвір 13 у пружному елементі роз тягання 4 має форму овалу (фіг. 2), при цьому його лінійний розмір "к" перевищує діаметр шарніра 6 на величину, не меншу ніж переміщення шарніра 3 під час дії наперед заданого (наприклад, номінального) навантаження....
П’єзоелектричний датчик статичних зусиль

Номер патенту: 45707
Опубліковано: 15.04.2002
Автори: Шарапов Валерій Михайлович, Мусієнко Максим Павлович, Саєнко Наталія Володимирівна, Лега Юрій Григорович, Ротте Сергій Вікторович
МПК: G01L 1/16, G01N 27/00
Мітки: статичних, датчик, зусиль, п'єзоелектричний
Формула / Реферат:
П'єзоелектричний датчик статичних зусиль, який містить циліндричний п'єзотрансформатор з електродами на торцях, які підключені до генератора електричних коливань та вимірювального приладу, причому п'єзотрансформатор встановлений між утримувачами у вигляді призм, який відрізняється тим, що датчик обладнаний металевим кільцем, закріпленим на циліндричній поверхні п'єзотрансформатора.
П’єзоелектричний датчик статичних зусиль
Номер патенту: 46300
Опубліковано: 15.05.2002
Автори: Саєнко Наталія Володимирівна, Шарапов Валерій Михайлович, Ротте Сергій Вікторович, Лега Юрій Григорович, Андріяко Юрій Володимирович, Чудаєва Ія Борисівна, Мусієнко Максим Павлович
МПК: G01L 1/16
Мітки: п'єзоелектричний, статичних, зусиль, датчик
Формула / Реферат:
П'єзоелектричний датчик статичних зусиль, який містить циліндричний п'єзотрансформатор з електродами на торцях, що підключені до генератора електричних коливань і вимірювального приладу, а також утримувачі, який відрізняється тим, що перший утримувач виконаний у вигляді призми, а другий виконаний у вигляді ультразвукового концентратора, який встановлений на циліндричній поверхні п'єзотрансформатора.
Спосіб безперервної реєстрації розтяжних зусиль ланцюга в ланцюговій стрічці ланцюгового скребкового транспортера і вимірювальний пристрій для його здійснення
Номер патенту: 51852
Опубліковано: 16.12.2002
Автори: Шустер Райнер, Шмідт Матіас, Гесснер Норберт
МПК: G01L 5/04, B65G 65/00
Мітки: стрічці, ланцюга, транспортера, безперервної, скребкового, ланцюгового, здійснення, зусиль, реєстрації, ланцюговий, вимірювальний, пристрій, спосіб, розтяжних
Формула / Реферат:
1. Спосіб безперервної реєстрації розтяжних зусиль ланцюга в ланцюговій стрічці ланцюгового скребкового транспортера, який забезпечує передачу, перетворення і обробку виміряної величини, що відображає миттєве значення навантаження в ланцюговій стрічці транспортного ланцюга, аж до числової і/або графічної видачі значення навантаження в ланцюговій стрічці у вигляді інформації про навантаження для транспортера, що експлуатується в лаві як...
Магнітопружний датчик зусиль
Номер патенту: 23554
Опубліковано: 02.06.1998
Автори: Політучий Олександр Іванович, Миргородський Михайло Мефодійович
МПК: G01L 1/12
Мітки: датчик, зусиль, магнітопружний
Формула / Реферат:
Магнітопружний датчик зусиль, вміщуючий корпус, чутливий елемент i дві взаємно перпендикулярні обмотки, розміщені під кутом 45° до напрямку дії вимірюємого зусилля в наскрізних отворах чутливого елемента, який відрізняється тим, що чутливий елемент виконано в тілі корпусу датчика форми усіченого шару, в вигляді днища циліндра з вінцем, з'єднуючим його з тілом корпуса, при цьому площа перерізу днища циліндра перпендикулярна до напрямку...
Попередній патент: Спосіб кристалізації солей із розчинів
Наступний патент: Спосіб одержання розчину монохромату натрію
Випадковий патент: Морозиво на молочній основі зі смаком цукерок