Спосіб наведення керованих об’єктів при перехопленні вільноманевруючих цілей
Номер патенту: 56476
Опубліковано: 10.01.2011
Автори: Герасименко Володимир Вікторович, Хомік Микола Миколайович, Невольніченко Анатолій Іванович, Слєпов Лев Іванович, Куровська Тетяна Юріївна
Формула / Реферат
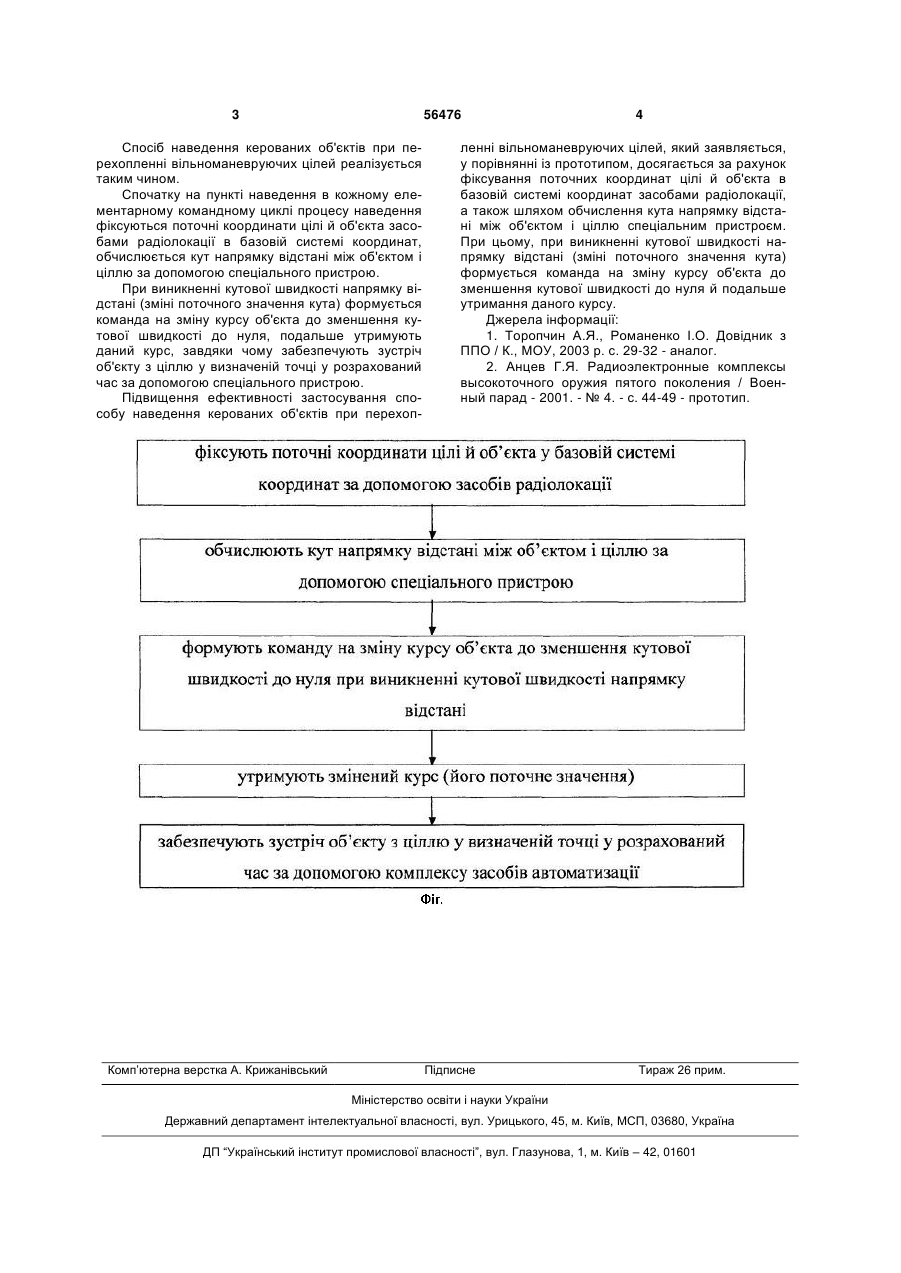
Спосіб наведення керованих об'єктів при перехопленні вільноманевруючих цілей, при якому забезпечують зустріч об'єкта з ціллю у визначеній точці у розрахований час за допомогою комплексу засобів автоматизації, який відрізняється тим, що додатково фіксують поточні координати цілі й об'єкта у базовій системі координат за допомогою засобів радіолокації, обчислюють кут напрямку відстані між об'єктом і ціллю за допомогою спеціального пристрою, при цьому при виникненні кутової швидкості напрямку відстані формують команду на зміну курсу об'єкта до зменшення кутової швидкості до нуля, утримують даний курс за допомогою спеціального пристрою.
Текст
Спосіб наведення керованих об'єктів при перехопленні вільноманевруючих цілей, при якому 3 56476 Спосіб наведення керованих об'єктів при перехопленні вільноманевруючих цілей реалізується таким чином. Спочатку на пункті наведення в кожному елементарному командному циклі процесу наведення фіксуються поточні координати цілі й об'єкта засобами радіолокації в базовій системі координат, обчислюється кут напрямку відстані між об'єктом і ціллю за допомогою спеціального пристрою. При виникненні кутової швидкості напрямку відстані (зміні поточного значення кута) формується команда на зміну курсу об'єкта до зменшення кутової швидкості до нуля, подальше утримують даний курс, завдяки чому забезпечують зустріч об'єкту з ціллю у визначеній точці у розрахований час за допомогою спеціального пристрою. Підвищення ефективності застосування способу наведення керованих об'єктів при перехоп Комп’ютерна верстка А. Крижанівський 4 ленні вільноманевруючих цілей, який заявляється, у порівнянні із прототипом, досягається за рахунок фіксування поточних координат цілі й об'єкта в базовій системі координат засобами радіолокації, а також шляхом обчислення кута напрямку відстані між об'єктом і ціллю спеціальним пристроєм. При цьому, при виникненні кутової швидкості напрямку відстані (зміні поточного значення кута) формується команда на зміну курсу об'єкта до зменшення кутової швидкості до нуля й подальше утримання даного курсу. Джерела інформації: 1. Торопчин А.Я., Романенко І.О. Довідник з ППО / К., МОУ, 2003 р. с. 29-32 - аналог. 2. Анцев Г.Я. Радиоэлектронные комплексы высокоточного оружия пятого поколения / Военный парад - 2001. - № 4. - с. 44-49 - прототип. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControl object guidance method while intercepting free-maneuvering targets
Автори англійськоюNevolnichenko Anatolii Ivanovych, Sliepov Lev Ivanovych, Kurovska Tetiana Yuriivna, Herasymenko Volodymyr Viktorovych, Khomik Mykola Mykolaiovych
Назва патенту російськоюСпособ наведения управляемых объектов при перехвате свободноманеврирующих целей
Автори російськоюНевольниченко Анатолий Иванович, Слепов Лев Иванович, Куровская Татьяна Юриевна, Герасименко Владимир Викторович, Хомик Николай Николаевич
МПК / Мітки
Мітки: керованих, об'єктів, наведення, спосіб, перехопленні, вільноманевруючих, цілей
Код посилання
<a href="https://ua.patents.su/2-56476-sposib-navedennya-kerovanikh-obehktiv-pri-perekhoplenni-vilnomanevruyuchikh-cilejj.html" target="_blank" rel="follow" title="База патентів України">Спосіб наведення керованих об’єктів при перехопленні вільноманевруючих цілей</a>
Спосіб знищення повітряних цілей за допомогою дистанційно керованих безпілотних літальних апаратів
Номер патенту: 31157
Опубліковано: 25.03.2008
Автори: Схабіцький Вадим Романович, Борохвостов Ігор Валерійович, Сила Ігор Михайлович, Кононов Олексій Анатолійович, Анпьонов Валентин Вадимович, Чіпіжко Юрій Анатолійович, Асланян Альберт Едуардович, Ткаченко Володимир Анатолійович, Василенко Олександр Васильович, Бондарчук Сергій Вікторович, Машталір Вадим Віталійович, Комаров Володимир Олександрович, Гребеник Олександр Миколайович, Лук'янов Павло Олександрович, Мельник Олександр Дмитрович, Галушка Володимир Іванович, Гордієвський Олексій Тихонович, Растригін Олександр Олексійович, Чучмій Андрій Володимирович, Степаненко Юрій Костянтинович, Парфеня Сергій Григорович, Лапицький Сергій Володимирович
МПК: B64C 31/00, H04B 7/185
Мітки: допомогою, спосіб, цілей, літальних, безпілотних, дистанційно, апаратів, керованих, повітряних, знищення
Формула / Реферат:
Спосіб знищення повітряних цілей за допомогою дистанційно керованих безпілотних літальних апаратів, при якому підготовляють дистанційно керований безпілотний літальний апарат, що містить вбудоване навігаційне устаткування і систему GPS, підготовляють засоби ураження і розгортають пункт керування, установлюють засоби ураження на дистанційно керований безпілотний літальний апарат, проводять зліт дистанційно керованого безпілотного літального...
Спосіб знищення повітряних цілей за допомогою ударних дистанційно керованих безпілотних літальних апаратів
Номер патенту: 31128
Опубліковано: 25.03.2008
Автори: Борохвостов Ігор Валерійович, Гребеник Олександр Миколайович, Парфеня Сергій Григорович, Кононов Олексій Анатолійович, Машталір Вадим Віталійович, Асланян Альберт Едуардович, Чіпіжко Юрій Анатолійович, Сєткін В'ячеслав Вікторович, Гордієвський Олексій Тихонович, Растригін Олександр Олексійович, Комаров Володимир Олександрович, Лапицький Сергій Володимирович, Чучмій Андрій Володимирович, Схабіцький Вадим Романович, Степаненко Юрій Костянтинович, Анпьонов Валентин Вадимович, Мельник Олександр Дмитрович, Сила Ігор Михайлович, Василенко Олександр Васильович, Лук'янов Павло Олександрович, Галушка Володимир Іванович, Семенюк Римма Петрівна, Ткаченко Володимир Анатолійович
МПК: B64C 31/00, H04B 7/185
Мітки: безпілотних, повітряних, цілей, керованих, спосіб, допомогою, апаратів, знищення, ударних, дистанційно, літальних
Формула / Реферат:
1. Спосіб знищення повітряних цілей за допомогою ударних дистанційно керованих безпілотних літальних апаратів, при якому підготовлюють ударні дистанційно керовані безпілотні літальні апарати, кожний з яких містить вбудоване навігаційне устаткування, систему GPS і фото/відеоапаратуру, підготовлюють засоби ураження і розгортають пункт прийому інформації, встановлюють засоби ураження на кожний з ударних дистанційно керованих безпілотних...
Спосіб знищення наземних цілей за допомогою ударних дистанційно керованих безпілотних літальних апаратів
Номер патенту: 31127
Опубліковано: 25.03.2008
Автори: Сила Ігор Михайлович, Мельник Олександр Дмитрович, Ляшенко Ігор Олександрович, Ткаченко Володимир Анатолійович, Кравченко Юрій Васильович, Галушка Володимир Іванович, Кононов Олексій Анатолійович, Комаров Володимир Олександрович, Гордієвський Олексій Тихонович, Лук'янов Павло Олександрович, Чіпіжко Юрій Анатолійович, Борохвостов Ігор Валерійович, Чучмій Андрій Володимирович, Лапицький Сергій Володимирович, Асланян Альберт Едуардович, Парфеня Сергій Григорович, Гребеник Олександр Миколайович, Невгад Сергій Степанович, Ревенко Дмитро Леонідович, Пермяков Олександр Юрійович, Растригін Олександр Олексійович, Машталір Вадим Віталійович, Василенко Олександр Васильович
МПК: B64C 31/00, H04B 7/185
Мітки: знищення, безпілотних, літальних, ударних, цілей, апаратів, спосіб, керованих, наземних, дистанційно, допомогою
Формула / Реферат:
1. Спосіб знищення наземних цілей за допомогою ударних дистанційно керованих безпілотних літальних апаратів, при якому попередньо проводять повітряну розвідку в тилу противника, передають дані на командний пункт і виявляють за результатами розвідки наземні цілі, підготовлюють один, два або більше ударних дистанційно керованих безпілотних літальних апаратів, розміщають на зазначених ударних дистанційно керованих безпілотних літальних апаратах...
Спосіб пропорційного наведення ракет на наземні цілі

Номер патенту: 64326
Опубліковано: 16.02.2004
Автор: Бакулін Ігор Євгенович
МПК: F41G 7/00
Мітки: наземні, цілі, наведення, пропорційного, ракет, спосіб
Формула / Реферат:
Спосіб пропорційного наведення ракет на наземні цілі, що включає безперервний вимір кутових швидкостей обертання вектора швидкості ракети і лінії візування та безперервну зміну кутової швидкості обертання вектора швидкості ракети прямо пропорційно кутовій швидкості обертання лінії візування, який відрізняється тим, що в процесі наведення додатково безперервно вимірюють вектор швидкості ракети, дальність до цілі, кути нахилу вектора швидкості...
Спосіб наведення керованого озброєння об’єктів бронетанкової техніки
Номер патенту: 75927
Опубліковано: 15.06.2006
Автори: Гордієнко Валентин Іванович, Хомченко Олексій Якович, Ревякин Леонід Дмитрович
Мітки: озброєння, керованого, бронетанкової, техніки, наведення, спосіб, об'єктів
Формула / Реферат:
Спосіб наведення керованого озброєння об'єктів бронетанкової техніки, який полягає в тому, що формують плавну кутову швидкість наведення лінії прицілювання пропорційно квадрату кута повороту органів керування пульта наведення згідно з виразом де
Попередній патент: Пристрій жабєєвих для швидкого розгортання, локалізації та адресного спрямування витоків рідин і/або газів з підводних джерел
Наступний патент: Спосіб лікування кістозно-вузлових утворень щитоподібної залози
Випадковий патент: Похідні гексагідроазепіну, спосіб їх одержання та фармацевтична композиція на їх основі