Спосіб двозонного управління перетворювачами в транспортних електроприводах з позитивним зворотним зв’язком по швидкості
Номер патенту: 65251
Опубліковано: 15.03.2004
Автори: Павленко Володимир Євдокимович, Павлов Віктор Борисович, Юрченко Олег Миколайович, Мостовяк Іван Васильович
Формула / Реферат
Спосіб двозонного управління перетворювачами в транспортних електроприводах з позитивним зворотним зв'язком по швидкості, який полягає в тому, що регулювання струму збудження тягового електродвигуна постійного струму з незалежним збудженням для швидкостей обертання вала вище номінального значення здійснюється пропорційно сигналу позитивного зворотного зв'язку по швидкості, який відрізняється тим, що рівень сигналу зворотного зв'язку примусово змінюють в залежності від сигналу задатчика (акселератора).
Текст
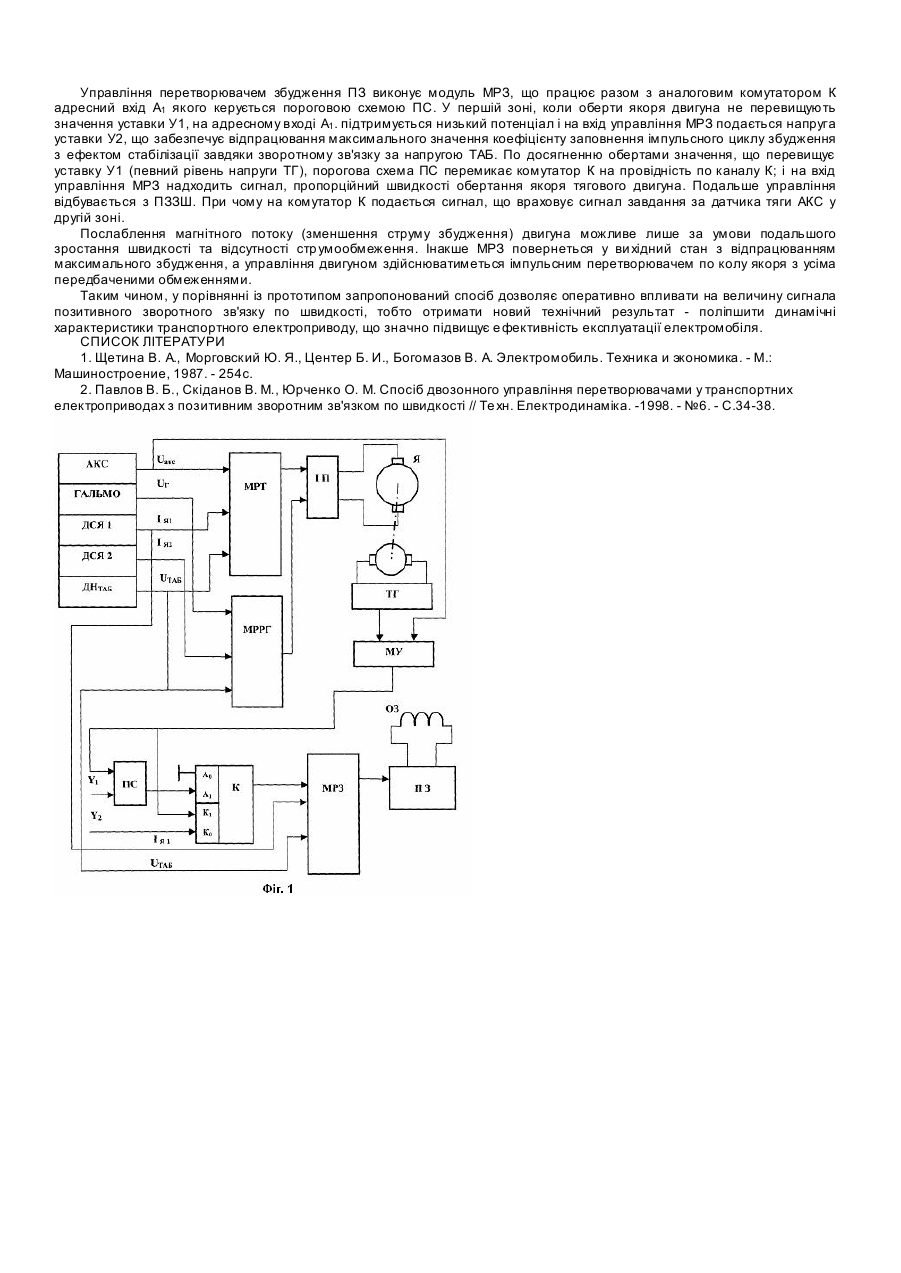
Винахід відноситься до електротехніки, переважно може бути застосований в тяговому електроприводі колісних машин з живленням від акумуляторної батареї та в електромобілях. Відомий спосіб регулювання швидкості обертання приводу постійного струму електромобіля з електродвигуном незалежного збудження [1]. При даному способі регулювання швидкості обертання валу електродвигуна в другій зоні (вище номінального її значення) здійснюється окремим напівпровідниковим перетворювачем, що змінює струм в незалежній обмотці збудження. Система управляння такого перетворювача контролює поточну швидкість електромобіля (швидкість обертання валу електродвигуна) і після досягнення номінального значення (при номінальному струмі збудження) для подальшого розгону електромобіля величина струму збудження змінюється в залежності від сигналу акселератора. Таким чином, в першій зоні регулювання швидкості здійснюється силовим перетворювачем, що змінює напругу на якорі електродвигуна від нуля до номінального значення, при цьому струм збудження дорівнює номінальному значенню. В другій зоні при номінальному значенні напруги на якорі електродвигуна струм збудження змінюється від номінальної до мінімально можливої величини. При цьому швидкість електромобіля змінюється від номінального до максимального значення. Однак слід зазначити, що при здійсненні двозонного регулювання за цим способом виникають додаткові складності, що зумовлені необхідністю стикування міжзонних переходів як в прямому, так і в зворотному напрямках. Найважче вирішується задача стикування у випадку закінчення режиму вільного вибігу електромобіля (накату). Тут мають бути точно визначені необхідні параметри управління обома перетворювачами, які б забезпечили їх початкове безструмове вмикання, тобто необхідно визначити, якій зоні управління відповідає режим руху транспортного засобу на момент прийняття рішення. Така задача є досить складною та громіздкою навіть для мікропроцесорних засобів управління, не кажучи вже про традиційні апаратні керуючі структури, бо передбачає виконання послідовності відповідних обчислювальних та ітераційних процедур, спрямованих на вірогідне визначення таких коефіцієнтів заповнення імпульсного циклу перетворювачів кіл якоря та збудження, які, при початковому вмиканні не викличуть кидків струму та н е вплинуть на поточну динаміку руху. Найбільш близьким технічним рішенням є спосіб двозонного управляння перетворювачами в транспортних електроприводах з позитивним зворотним зв'язком по швидкості (ПЗЗШ) [2]. Суть способу полягає в тому, що сигнал ПЗЗШ електромобіля подається безпосередньо на систему управління перетворювачем обмотки збудження, що дозволяє без будь-яких обчислень встановити керуючі дії для регулювання швидкості обертання валу тягового електродвигуна. Пропорційна зміна струму збудження в залежності від швидкості електромобіля з постійним коефіцієнтом передачі зворотного зв'язку дозволяє автоматично здійснювати перехід із зони в зону, а також із режиму накату в тяговий або гальмівний режим. Однак недоліком розглянутого способу є той факт, що сигнал ПЗЗШ, який подається безпосередньо на систему управління перетворювачем обмотки збудження не пов'язаний з керуючою дією акселератора, що регулює швидкість електромобіля. Таким чином, водій не може подіяти на динамічні характеристики машини у другій зоні регулювання, тому що зміна швидкості у цьому випадку відбувається автоматично і визначається закладеними раніше параметрами сигналу зворотного зв'язку. Таке рішення для руху електромобіля не може бути прийнятним у всі х випадках, тому що дуже часто умови дорожнього руху вимагають змінювати швидкість руху та прискорення електромобіля і в другій зоні регулювання в залежності від бажання водія, що діє у відповідності до дорожньої ситуації. Задачею винаходу є створення такого способу двозонного управління перетворювачами в транспортних електроприводах з позитивним зворотним зв'язком по швидкості, в якому за допомогою примусової зміни величини сигналу ПЗЗШ в залежності від сигналу задатчика досягається зміна динамічних характеристик електротранспортного засобу. Поставлена задача вирішується завдяки тому, що в способі двозонного управління перетворювачами в транспортних електроприводах з позитивним зворотним зв'язком по швидкості, який полягає в тому, що регулювання струму збудження тягового електродвигуна постійного струму з незалежним збудженням для швидкостей обертання валу ви ще номінального значення здійснюється пропорційно сигналу позитивного зворотного зв'язку по швидкості, а рівень сигналу зворотного зв'язку примусово змінюється в залежності від сигналу задатчика (акселератора). Порівняльний аналіз відомих те хнічних рішень показує, що запропонований спосіб дозволяє поліпшити динамічні характеристики електропривода завдяки тому, що при регулюванні швидкості у другій зоні рівень сигналу ПЗЗШ, від якого залежить величина струму збудження тягового електродвигуна, обумовлений не тільки швидкістю обертання валу електродвигуна, але й рівнем сигналу задатчика, що безпосередньо надходить від акселератора, яким керує водій. Таким чином у другій зоні регулювання за запропонованим способом керування електромобілем здійснюється більш ефективно, з гнучкішим реагування на дорожню ситуацію, що підвищує ефективність експлуатації електромобіля в цілому. На основі наведеного вище можна зробити висновок про те, що сук упність суттєви х ознак, що викладена у формулі винаходу є необхідною та достатньою для досягнення нового технічного результату, що забезпечується винаходом. Запропонований спосіб може бути реалізований за допомогою низки відомих пристроїв. Наприклад, один з варіантів системи двозонного регулювання з ПЗЗШ зображено на фіг.1. Система складається з Я якоря, ТГ - тахогенератора та ОЗ - обмотки збудження тягового силового двигуна; модулів регулювання МРТ - тяги, МРРГ - рекуперативного гальмування та МРЗ - збудження; ІП - імпульсного перетворювача якоря та ПЗ - перетворювача струму обмотки збудження; задатчиків АКС - тяги та "Гальмо" - рекуперативного гальмування; датчиків ДСЯ1 - струму якоря в режимі тяги, ДСЯ2 - струму якоря в режимі гальмування та ДНТАБ - напруги тягової акумуляторної батареї (ТАБ); МУ модуля управління, що виробляє керуючий сигнал для ПЗ з урахуванням сигналу ТГ та АКС; ПС - порогової схеми та К аналогового комутатора. Розглянемо загальні закономірності функціонування цієї системи. Управління імпульсним перетворювачем ІП здійснює модуль регулювання тяги (МРТ), який виробляє керуючий ШІМ-сигнал , пропорційний сигналу завдання акселератора. При цьому відпрацьовуються зворотні зв'язки за струмом якоря (Я) (головне струмообмеження за сигналом з датчика струму тягового режиму ДСЯ1) та за напругою ТАБ (ДНТАБ) (захист від перерозряду батареї за найменшим припустимим рівнем напруги). У режимі імпульсної рекуперації керуючі дії ІП у колі якоря виконує модуль регулювання режиму гальмування (МРРГ), що генерує ШІМ-сигнал, пропорційний сигналу гальмівного задатчика. Зворотні зв'язки тут організовані у такий спосіб, що забезпечує стр умообмеження згідно з сигналом датчика рекуперативного струму у колі якоря (ДСЯ2) та захист ТАБ від перевищення напруги при протіканні зарядних струмів у рекуперативному режимі. Управління перетворювачем збудження ПЗ виконує модуль МРЗ, що працює разом з аналоговим комутатором К адресний вхід А1 якого керується пороговою схемою ПС. У першій зоні, коли оберти якоря двигуна не перевищують значення уставки У1, на адресному вході А1 . підтримується низький потенціал і на вхід управління МРЗ подається напруга уставки У2, що забезпечує відпрацювання максимального значення коефіцієнту заповнення імпульсного циклу збудження з ефектом стабілізації завдяки зворотному зв'язку за напругою ТАБ. По досягненню обертами значення, що перевищує уставку У1 (певний рівень напруги ТГ), порогова схема ПС перемикає комутатор К на провідність по каналу К; і на вхід управління МРЗ надходить сигнал, пропорційний швидкості обертання якоря тягового двигуна. Подальше управління відбувається з ПЗЗШ. При чому на комутатор К подається сигнал, що враховує сигнал завдання за датчика тяги АКС у другій зоні. Послаблення магнітного потоку (зменшення струму збудження) двигуна можливе лише за умови подальшого зростання швидкості та відсутності стр умообмеження. Інакше МРЗ повернеться у ви хідний стан з відпрацюванням максимального збудження, а управління двигуном здійснюватиметься імпульсним перетворювачем по колу якоря з усіма передбаченими обмеженнями. Таким чином, у порівнянні із прототипом запропонований спосіб дозволяє оперативно впливати на величину сигнала позитивного зворотного зв'язку по швидкості, тобто отримати новий технічний результат - поліпшити динамічні характеристики транспортного електроприводу, що значно підвищує е фективність експлуатації електромобіля. СПИСОК ЛІТЕРАТУРИ 1. Щетина В. А., Морговский Ю. Я., Центер Б. И., Богомазов В. А. Электромобиль. Техника и экономика. - М.: Машиностроение, 1987. - 254с. 2. Павлов В. Б., Скіданов В. М., Юрченко О. М. Спосіб двозонного управління перетворювачами у транспортних електроприводах з позитивним зворотним зв'язком по швидкості // Те хн. Електродинаміка. -1998. - №6. - С.34-38.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of the two-zone control of the converter of a traction dc drive with positive speed feedback
Автори англійськоюPavlov Viktor Borysovych, Mostoviak Ivan Vasyliovych, Yurchenko Oleh Mykolaiovych, Pavlenko Volodymyr Yevdokymovych
Назва патенту російськоюСпособ двухзонного управления преобразователем в составе тягового электропривода постоянного тока с положительной обратной связью по скорости
Автори російськоюПавлов Виктор Борисович, Мостовяк Иван Васильевич, Юрченко Олег Николаевич, Павленко Владимир Евдокимович
МПК / Мітки
Мітки: швидкості, електроприводах, позитивним, зворотним, спосіб, перетворювачами, двозонного, транспортних, зв'язком, управління
Код посилання
<a href="https://ua.patents.su/2-65251-sposib-dvozonnogo-upravlinnya-peretvoryuvachami-v-transportnikh-elektroprivodakh-z-pozitivnim-zvorotnim-zvyazkom-po-shvidkosti.html" target="_blank" rel="follow" title="База патентів України">Спосіб двозонного управління перетворювачами в транспортних електроприводах з позитивним зворотним зв’язком по швидкості</a>
Спосіб регулювання швидкості по відхиленню і регулятор швидкості для його здійснення
Номер патенту: 51957
Опубліковано: 16.12.2002
Автор: Сільченко Едуард Євгенович
МПК: H02P 5/00
Мітки: регулювання, здійснення, спосіб, регулятор, швидкості, відхиленню
Формула / Реферат:
1. Спосіб регулювання швидкості по відхиленню, де відхилення є різницею сигналів завдання на швидкість і зворотного зв’язку по швидкості, який відрізняється тим, що величину відхилення додатково зменшують на величину, рівну прогнозованій зміні швидкості при динаміці електропривода, яку спостерігають.2. Спосіб за п. 1, який відрізняється тим, що прогнозована зміна швидкості визначається за формулою:
Система релейного управління збудженням двигуна постійного струму
Номер патенту: 33414
Опубліковано: 15.02.2001
Автори: Шевченко Наталія Іванівна, Зеленов Анатолій Борисович
МПК: H02P 7/06
Мітки: релейного, управління, система, двигуна, постійного, струму, збудженням
Текст:
...релейний регулятор з суматором на його вході, до якого під'єднані сигнал завдання та вихід датчика ерс цього тиристорного збуджувача, а вхід з датчика під'єнаний до виходу тиристорного збуджувача, у відповідності з винаходом додатково вводяться датчики струму збудження, ерс та швидкості двигуна, входи яких підімкнені до відповідних виходів двигуна, а виходи датчиків струму збудження і ерс двигуна з'єднані з входами комутатора...
Спосіб регулювання швидкості рельсових транспортних засобів
Номер патенту: 7229
Опубліковано: 30.06.1995
Автори: Ігнаткін Владімір Івановіч, Жуков Васілій Павловіч, Фомішін Валєрій Ніколаєвіч
Мітки: рельсових, швидкості, регулювання, засобів, спосіб, транспортних
Формула / Реферат:
1. Способ регулирования скорости рельсовых транспортных средств, заключающийся в силовом воздействии на колесо транспортного средства расположенными на пути рабочими элементами, отличающийся тем, что, с целью увеличения допустимого силового воздействия, рабочим элементом воздействуют на внутреннюю радиальную поверхность обода колеса в нижней его половине за пределами воображаемой линии, соединяющей центр колеса и точку его контакта с...
Спіральний кабель управління рухомих відносно одна одної частин транспортних засобів
Номер патенту: 46898
Опубліковано: 17.06.2002
Автори: Гавловський Олександр Олександрович, Олійник Володимир Михайлович
МПК: H02G 11/00, H01B 7/04
Мітки: транспортних, відносної, засобів, частин, спіральний, одна, одної, управління, рухомих, кабель
Формула / Реферат:
1. Спіральний кабель управління рухомих одна відносно одної частин транспортних засобів, який містить розміщені в гнучкій оболонці електроізольовані струмопровідні жили та тверде порошкоподібне мастило, який відрізняється тим, що електроізольовані струмопровідні жили розташовані в оболонці вільно з можливістю руху одна відносно одної, а тверде порошкоподібне мастило нанесене на поверхню кожної жили.2. Спіральний кабель по п. 1, який...
Спосіб силового автоматичного управління електричною машиною та пристрій для його здійснення
Номер патенту: 54727
Опубліковано: 17.03.2003
Автори: Богомол Володимир Іванович, Борсук Євген Павлович, Ленчевський Євген Анатолійович, Туваржиєв Валентин Карпович
МПК: G05F 1/00
Мітки: управління, здійснення, спосіб, автоматичного, силового, електричною, пристрій, машиною
Формула / Реферат:
1. Спосіб силового автоматичного управління електричною машиною, який полягає у тому, що порівнюють відхилення рівня параметра у точці регулювання від еталонного рівня регульованого параметра, а потім на основі порівняння, рівень напруги електроенергії джерела електричного струму обмежують, отриману електроенергію фільтрують і подають на збудження електричної машини, який відрізняється тим, що рівень напруги електроенергії джерела...
Попередній патент: Підводний апарат
Наступний патент: Оральні швидкорозчинювані композиції агоністів допаміну та спосіб лікування хвороби паркінсона
Випадковий патент: Антифрикційний композиційний матеріал на основі нікелю