Підводний апарат
Номер патенту: 65250
Опубліковано: 15.03.2004
Автори: Поліщук Сергій Володимирович, Довгий Станіслав Олексійович, Мороз Володимир Васильович, Бабенко Віктор Віталійович

Формула / Реферат
Підводний апарат із приводом і регульованою поверхнею обтікання, який відрізняється тим, що поверхня обтікання виконана за формою носової частини апарата з розміщеним у ній електродвигуном обертального руху, на осі якого закріплене кільце, шарнірно з'єднане із сердечником електромагніта, що має в кінцевій своїй частині пустотілий циліндр з отворами, а привід виконаний із блоком його амплітудно-частотного керування.
Текст
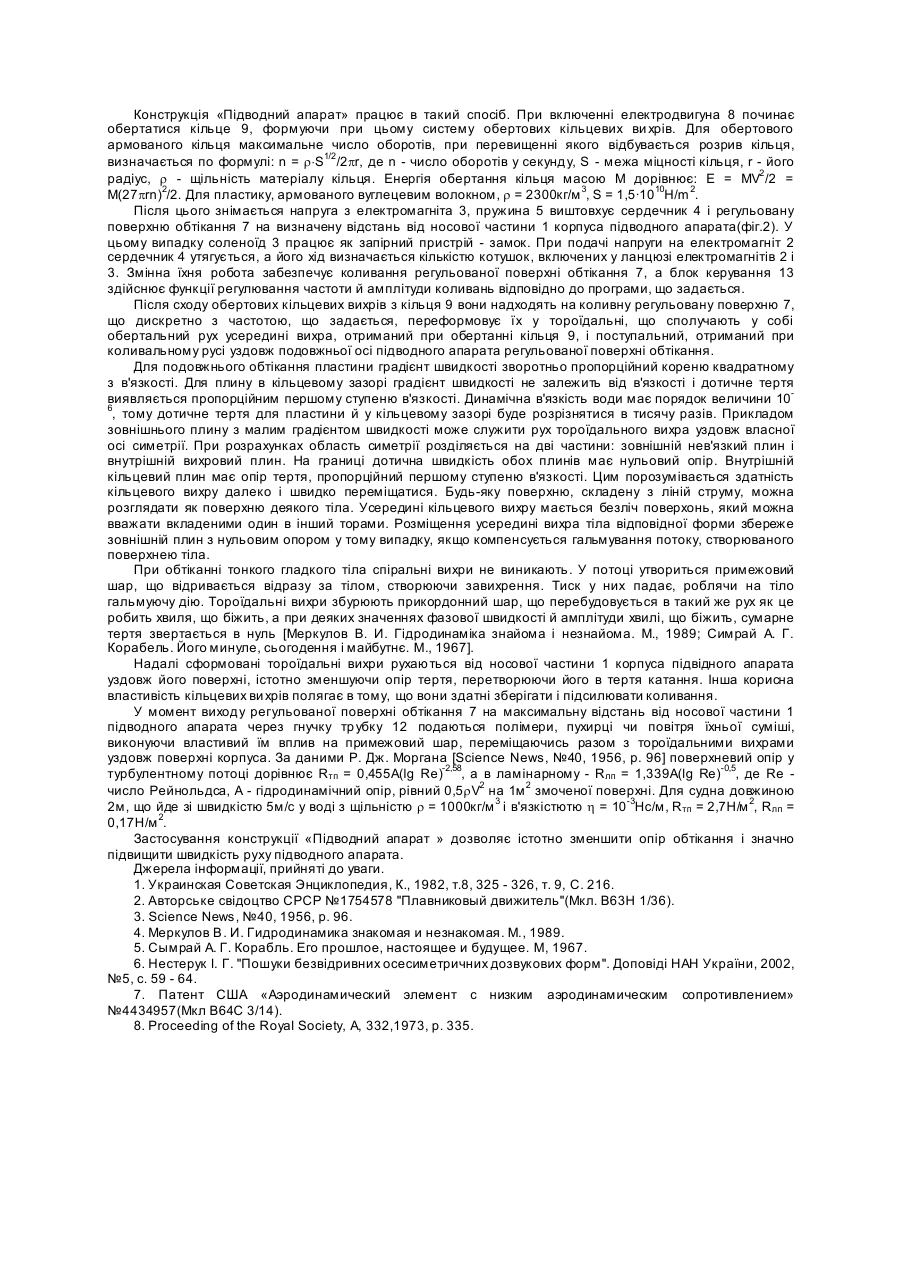
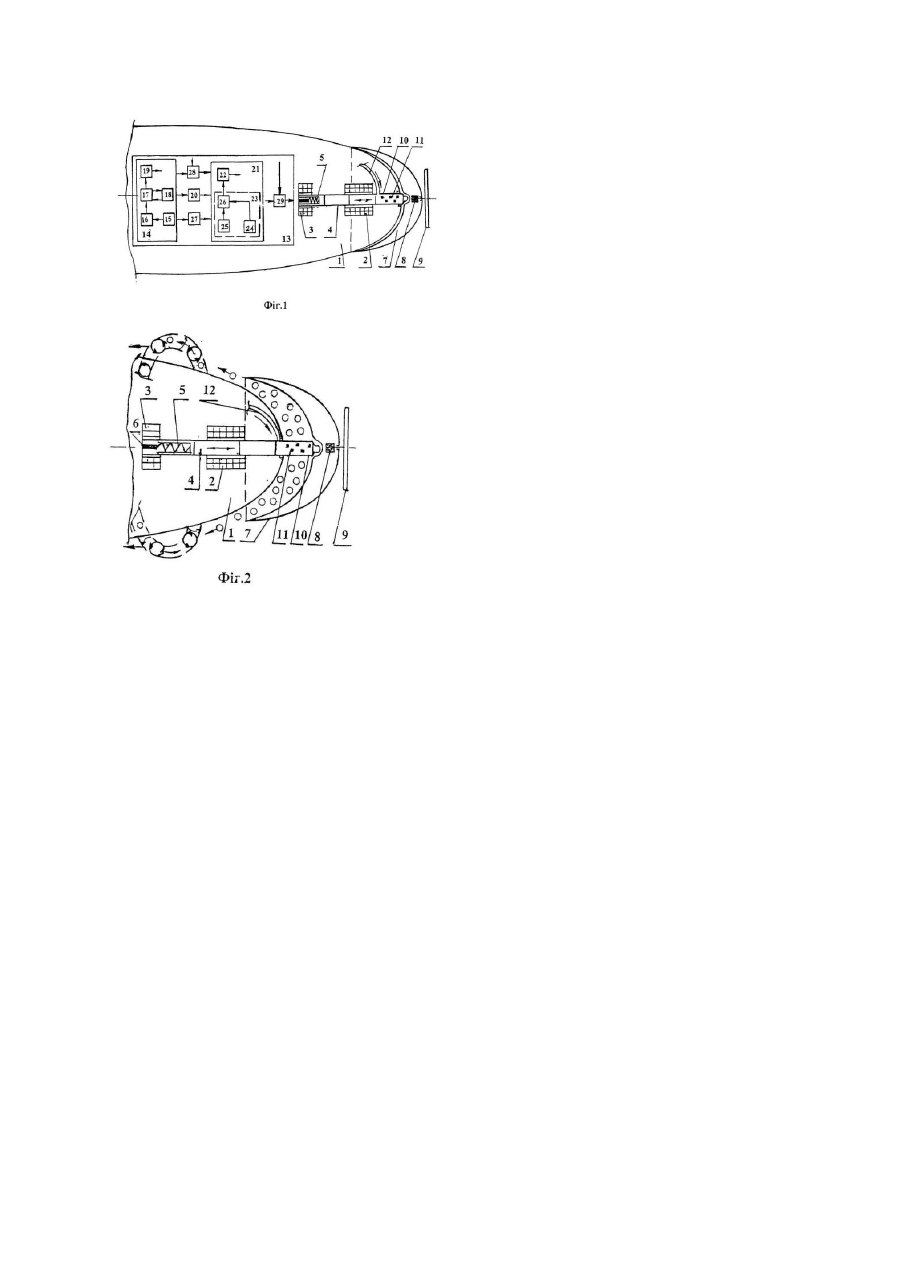
Винахід відноситься до області суднобудування і може бути використаний при проектуванні і створенні підводних апаратів. У техніці відомі конструкції корпусів підводних апаратів [Українська Радянська Енциклопедія, К., 1982, т. 8,325 - 326, т. 9, с. 216]. У патенті США «Аеродинамічний елемент із низьким аеродинамічним опором» [№4434957, Мкл В64С 3/14] поверхня обтікання має переривчасте лінійне вихроутворююче пристосування, що знаходиться за передньою крайкою поперек напрямку обтікання і створює ряд послідовно розташованих поперек потоку вихрів. Недоліком цієї розробки є неможливість регулювання вихроутворювання при зміні характеристик руху апарата. У роботі І. М. Нестерука "Пошуки безвідривних осесиметричних дозвукових форм" [Доповіді НАН України, 2002, №5, с. 59 - 64] розглядаються деякі принципові питання існування форм з від'ємним градієнтом тиску на всій поверхні обтікання. Пояснення даються за допомогою рівняння першого наближення, що зв'язує коефіцієнт тиску Cр(x) на поверхні тонкого осесиметричного тіла з його радіусом R(x): d2R2/d x2 = -Cp(x)/Іn x, де x - малий параметр(відношення максимального радіуса тіла до його довжини). Для зменшення довжини зони додатного градієнта тиску використовувались додаткові джерела та стоки, розташовані в середині поверхні тіла. Завдяки цьому вдалося зменшити величину додатного градієнта до 0,3% від загальної довжини тіла. Була висунута гіпотеза, що форми з додатним градієнтом тиску майже по всій поверхні дозволяють уникнути відриву без будь-якого керування примежовим шаром. Для перевірки цієї гіпотези було виготовлено серію тіл з різними значеннями параметра додатного градієнта(від 0,3% до 12%). Відрив спостерігався на всіх тілах, але його вдалося уникнути за рахунок тонких кілець, розташованих на поверхні тіла. Подібні перешкоди в проміжовому шарі використовувались у класичних експериментах Прандтля для зменшення опору кулі за рахунок турбулізації проміжового шару та зсуву вниз за потоком точки відриву. Найбільш близьким по технічній сутності до винаходу «Підводний апарат», що заявляється, є авторське свідоцтво СРСР «Плавцевий рушій» [№1754578, Мкл В63Н 1/36], що містить крило, у якому маються салінони з приводом, закріплені на його вихідних осях з можливістю їхнього повороту у бік несучої поверхні крила. Основний недолік цієї конструкції полягає в тому, що регулювання відриву ви хрів за рахунок утворення виступу перед несучою поверхнею крила не дозволяє формувати кількість вихрів, розповсюджуваних уздовж поверхні обтікання з частотою, обумовленої гідродинамічними характеристиками руху підвідного апарата і швидкості потоку, що набігає, а також постійно підтримувати їхнє генерування. Задачею дійсного винаходу «Підводний апарат» є поліпшення умов обтікання поверхні підводного апарата, що дозволяє підвищити його швидкісні якості. Поставлена задача реалізується за рахунок того, що в підводному апараті з приводом і регульованою поверхнею обтікання, остання, виконана за формою носової частини апарата з розміщеним у ній електродвигуном обертального руху, на осі якого закріплене кільце, шарнірно з'єднане із сердечником електромагніта, що має в кінцевій своїй частині пустотілий циліндр з отворами, а привід виконаний із блоком його амплітудно-частотного керування. На відміну від прототипу винахід «Підводний аппарат», що заявляється, у залежності від необхідних гідродинамічних задач, виконуваних при русі підвідного апарата, дозволяє створювати і регулювати систему тороїдальних вихрів, розповсюджуваних уздовж поверхні його корпуса. При аналізі інших аналогів ознак, відмінних від ти х, що заявляються, не виявлено. Сутність винаходу пояснюється кресленнями, де: на фіг.1 показаний загальний вид пристрою, на фіг.2 - положення регульованої поверхні в робочому стані. Конструкція «Підводний апарат» містить носову частину 1 корпуса підводного апарата, у якій установлені соленоїди 2 і 3 із сердечником 4, у порожнині якого одним кінцем закріплена пружина 5, інший кінець якої з'єднаний з пальцем 6, а сердечник через проріз у носовій частині підвідного апарата за допомогою шарніра з'єднується з виконаною за формою носової частини підводного апарата регульованою поверхнею обтікання 7, у тілі якої розміщений електродвигун обертального руху 8, на осі якого закріплено кільце 9; причому сердечник в кінцевій своїй частині до шарнірного з'єднання виконаний у виді пустотілого циліндра 10 з отворами 11 на своїй бічній поверхні, у яку входить гнучка трубка 12 для подачі полімерів, пухирців чи повітря їхньої суміші, а для керування регульованою поверхнею обтікання використовується процесор 13, розроблений на основі інтегральних логічних і цифрових мікросхем, а також на дискретних елементах, що містить формувач імпульсів 14 з генератором, що задає, 15, що представляє собою термостабілізований RC-генератор, виконаний на логічних елементах, що виробляє короткі прямокутні імпульси, вихід якого підключений до дільника частоти 16 з перемінним коефіцієнтом розподілу, що виконаний на двоїчно-десяткових реверсивних лічильниках з попереднім введенням інформації; фазообертач 17, необхідний для регулювання зрушення фази сигналів, фазовий дискримінатор 18, застосований для спостереження за фазовими характеристиками фазообертача, і у випадку збою, коректує їх; ключовий каскад 19 для відключення виконавчого механізму; блок узгодження 20 для узгодження рівнів сигналів формувача і керуючого блоку 21, що представляє собою два ідентичних пристрої числоімпульсного керування тиристорами, що складаються з генератора імпульсів 22 і фазоздвигаючого пристрою 23, що містить вхідний пристрій 24, який сприймає напругу керування, генератор перемінної по величині напруги 25 і пристрій, що порівнює 26; органи керування 27 для регулювання коефіцієнта розподілу, блок живлення 28 для елементів процесора і силовий блок 29, що являє собою випрямляч і панель тиристорів. Конструкція «Підводний апарат» працює в такий спосіб. При включенні електродвигуна 8 починає обертатися кільце 9, формуючи при цьому систему обертових кільцевих ви хрів. Для обертового армованого кільця максимальне число оборотів, при перевищенні якого відбувається розрив кільця, визначається по формулі: n = r×S1/2 /2pr, де n - число оборотів у секунду, S - межа міцності кільця, r - його радіус, r - щільність матеріалу кільця. Енергія обертання кільця масою М дорівнює: E = MV2 /2 = M(27prn)2/2. Для пластику, армованого вуглецевим волокном, r = 2300кг/м 3, S = 1,5·10 10H/m 2. Після цього знімається напруга з електромагніта 3, пружина 5 виштовхує сердечник 4 і регульовану поверхню обтікання 7 на визначену відстань від носової частини 1 корпуса підводного апарата(фіг.2). У цьому випадку соленоїд 3 працює як запірний пристрій - замок. При подачі напруги на електромагніт 2 сердечник 4 утягується, а його хід визначається кількістю котушок, включених у ланцюзі електромагнітів 2 і 3. Змінна їхня робота забезпечує коливання регульованої поверхні обтікання 7, а блок керування 13 здійснює функції регулювання частоти й амплітуди коливань відповідно до програми, що задається. Після сходу обертових кільцевих вихрів з кільця 9 вони надходять на коливну регульовану поверхню 7, що дискретно з частотою, що задається, переформовує їх у тороїдальні, що сполучають у собі обертальний рух усередині вихра, отриманий при обертанні кільця 9, і поступальний, отриманий при коливальному русі уздовж подовжньої осі підводного апарата регульованої поверхні обтікання. Для подовжнього обтікання пластини градієнт швидкості зворотньо пропорційний кореню квадратному з в'язкості. Для плину в кільцевому зазорі градієнт швидкості не залежить від в'язкості і дотичне тертя виявляється пропорційним першому ступеню в'язкості. Динамічна в'язкість води має порядок величини 106 , тому дотичне тертя для пластини й у кільцевому зазорі буде розрізнятися в тисячу разів. Прикладом зовнішнього плину з малим градієнтом швидкості може служити рух тороїдального вихра уздовж власної осі симетрії. При розрахунках область симетрії розділяється на дві частини: зовнішній нев'язкий плин і внутрішній вихровий плин. На границі дотична швидкість обох плинів має нульовий опір. Внутрішній кільцевий плин має опір тертя, пропорційний першому ступеню в'язкості. Цим порозумівається здатність кільцевого вихру далеко і швидко переміщатися. Будь-яку поверхню, складену з ліній струму, можна розглядати як поверхню деякого тіла. Усередині кільцевого вихру мається безліч поверхонь, який можна вважати вкладеними один в інший торами. Розміщення усередині вихра тіла відповідної форми збереже зовнішній плин з нульовим опором у тому випадку, якщо компенсується гальмування потоку, створюваного поверхнею тіла. При обтіканні тонкого гладкого тіла спіральні вихри не виникають. У потоці утвориться примежовий шар, що відривається відразу за тілом, створюючи завихрення. Тиск у них падає, роблячи на тіло гальмуючу дію. Тороїдальні вихри збурюють прикордонний шар, що перебудовується в такий же рух як це робить хвиля, що біжить, а при деяких значеннях фазової швидкості й амплітуди хвилі, що біжить, сумарне тертя звертається в нуль [Меркулов В. И. Гідродинаміка знайома і незнайома. М., 1989; Симрай А. Г. Корабель. Його минуле, сьогодення і майбутнє. М., 1967]. Надалі сформовані тороїдальні вихри рухаються від носової частини 1 корпуса підвідного апарата уздовж його поверхні, істотно зменшуючи опір тертя, перетворюючи його в тертя катання. Інша корисна властивість кільцевих ви хрів полягає в тому, що вони здатні зберігати і підсилювати коливання. У момент виходу регульованої поверхні обтікання 7 на максимальну відстань від носової частини 1 підводного апарата через гнучку тр убку 12 подаються полімери, пухирці чи повітря їхньої суміші, виконуючи властивий їм вплив на примежовий шар, переміщаючись разом з тороїдальними вихрами уздовж поверхні корпуса. За даними Р. Дж. Моргана [Science News, №40, 1956, р. 96] поверхневий опір у турбулентному потоці дорівнює Rтп = 0,455A(lg Re)-2,58, а в ламінарному - Rлп = 1,339A(lg Re)-0,5, де Re число Рейнольдса, А - гідродинамічний опір, рівний 0,5rV2 на 1м 2 змоченої поверхні. Для судна довжиною 2м, що йде зі швидкістю 5м/с у воді з щільністю r = 1000кг/м 3 і в'язкістютю h = 10-3Нс/м, Rтп = 2,7Н/м 2, Rлп = 0,17Н/м 2. Застосування конструкції «Підводний апарат » дозволяє істотно зменшити опір обтікання і значно підвищити швидкість руху підводного апарата. Джерела інформації, прийняті до уваги. 1. Украинская Советская Энциклопедия, К., 1982, т.8, 325 - 326, т. 9, С. 216. 2. Авторське свідоцтво СРСР №1754578 "Плавниковый движитель"(Мкл. В63Н 1/36). 3. Science News, №40, 1956, р. 96. 4. Меркулов В. И. Гидродинамика знакомая и незнакомая. М., 1989. 5. Сымрай А. Г. Корабль. Его прошлое, настоящее и будущее. М, 1967. 6. Нестерук І. Г. "Пошуки безвідривних осесиметричних дозвукових форм". Доповіді HAH України, 2002, №5, с. 59 - 64. 7. Патент США «Аэродинамический элемент с низким аэродинамическим сопротивлением» №4434957(Мкл В64С 3/14). 8. Proceeding of the Royal Society, A, 332,1973, p. 335.
ДивитисяДодаткова інформація
Назва патенту англійськоюUnderwater vehicle
Автори англійськоюDovhyi Stanislav Oleksiiovych, Babenko Viktor Vitaliiovych, Polischuk Serhii Volodymyrovych
Назва патенту російськоюПодводный аппарат
Автори російськоюДовгий Станислав Алексеевич, Бабенко Виктор Витальевич, Полищук Сергей Владимирович
МПК / Мітки
Код посилання
<a href="https://ua.patents.su/3-65250-pidvodnijj-aparat.html" target="_blank" rel="follow" title="База патентів України">Підводний апарат</a>
Підводний апарат з плавцевим рушієм

Номер патенту: 49237
Опубліковано: 16.09.2002
Автори: Бабенко Віктор Віталійович, Поліщук Сергій Володимирович
Мітки: апарат, плавцевим, підводний, рушієм
Формула / Реферат:
Підводний апарат з плавцевим рушієм, в носовій і кормовій частинах якого розміщені електродвигуни поворотного типу, який відрізняється тим, що в корпусі апарата виконані виїмки, в яких встановлені пластини з можливістю їх повороту навколо поздовжньої осі корпусу апарата, а в тілі головного плавцевого рушія додатково розміщено електродвигун, з’єднаний кронштейном з додатковим плавцевим рушієм з можливістю його коливання у площині,...
Підводний апарат з плавцевим рушієм
Номер патенту: 41724
Опубліковано: 17.09.2001
Автори: Поліщук Сергій Володимирович, Майстер Валентин Іванович, Бабенко Віктор Віталійович
Мітки: плавцевим, апарат, підводний, рушієм
Формула / Реферат:
Підводний апарат з плавцевим рушієм, який містить крило, на поверхні якого є переміжні зубці та западини, який відрізняється тим, що в корпусі апарата та плавцевого рушія встановлені соленоїди, підпружинені сердечники яких жорстко з'єднані з циліндром, на поверхні якого додатково розміщені переміжні зубці та западини, і коробом, які мають можливість висування відповідно з корпусу апарата та плавцевого рушія.
Підводний апарат з плавцевим рушієм
Номер патенту: 41616
Опубліковано: 17.09.2001
Автори: Поліщук Сергій Володимирович, Мартиненко Іван Іванович, Мороз Володимир Василійович, Бабенко Віктор Віталійович, Коробов Віталій Ілліч
Мітки: рушієм, підводний, плавцевим, апарат
Формула / Реферат:
Підводний апарат з плавцевим рушієм, в носовій і кормовій частинах якого розміщені електродвигуни, який відрізняється тим, що на вихідному валу електродвигуна, розміщеного в носовій частині підводного апарату, закріплений з можливістю його повороту на 180° кронштейн з поперечкою, на обох боках якої встановлені крила, а в прорізу кормової частини є кронштейн з електродвигуном, на осі якого закріплено стебло з плавцевим рушієм.
Підводний планер

Номер патенту: 42202
Опубліковано: 15.10.2001
Автори: Майстер Валентин Іванович, Коробов Віталій Ілліч, Мороз Володимир Василійович, Поліщук Сергій Володимирович, Бабенко Віктор Віталійович
Формула / Реферат:
Підводний планер, який містить корпус з регульованою несучою поверхнею, який відрізняється тим, що остання, з можливістю її повороту на 360°, встановлена на нерухомих частинах несучої поверхні з обох сторін корпусу підводного планера, а складений плавцевий рушій містить стаціонарну та рухомі частини з висувними пластинами, кожна з яких з’єднана з сердечниками соленоїдів.
Підводний хвилелом
Номер патенту: 49242
Опубліковано: 16.09.2002
Автори: Сільченко Костянтин Васильович, Кільвандер Евальд Якович
МПК: E02B 3/06
Формула / Реферат:
Підводний хвилелом, що обладнаний щитом, який відрізняється тим, що виконаний у вигляді утримуючих стовпів, які об`єднані горизонтальною віссю із шарнірно закріпленим хвилегасильним щитом Г – подібної форми з козирком, спрямованим до берега, що має можливість кругового переміщення.